Embed Size (px)
Citation preview
Guía para Self Powered ... 1.- Mediciones
1.1Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
1 Mediciones
Guía para Self Powered ... 1.- Mediciones
1.2Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
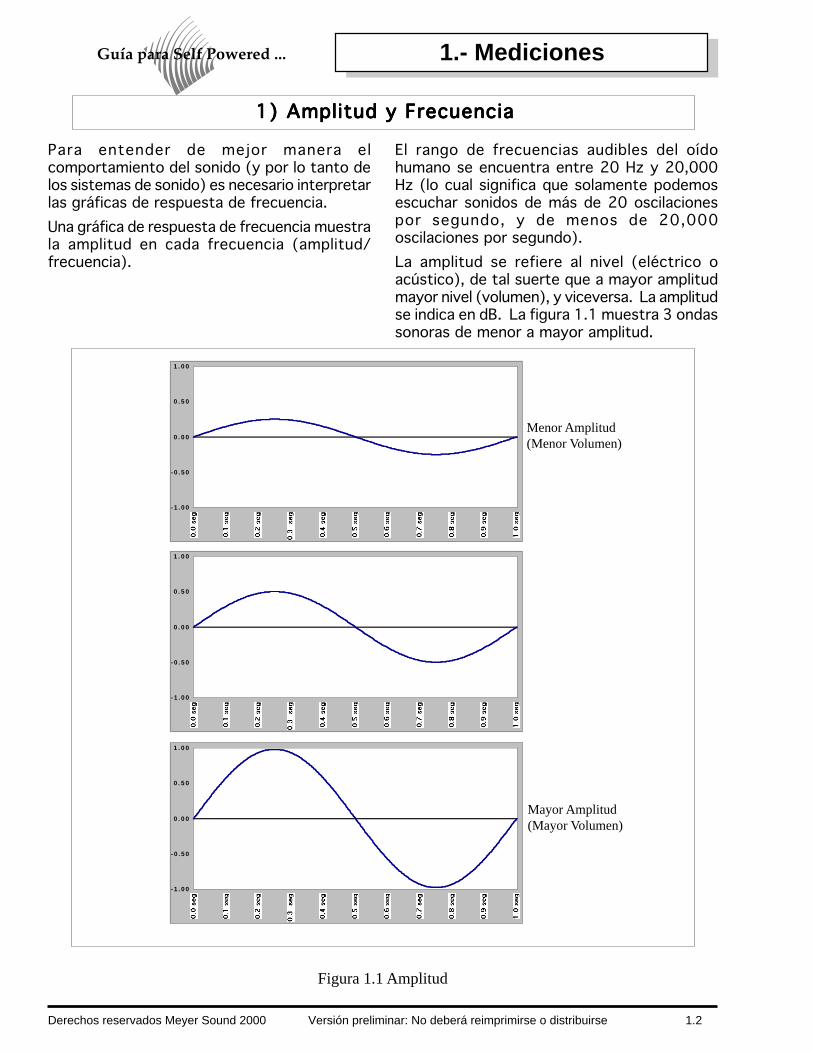
Para entender de mejor manera elcomportamiento del sonido (y por lo tanto delos sistemas de sonido) es necesario interpretarlas gráficas de respuesta de frecuencia.Una gráfica de respuesta de frecuencia muestrala amplitud en cada frecuencia (amplitud/frecuencia).
El rango de frecuencias audibles del oídohumano se encuentra entre 20 Hz y 20,000Hz (lo cual significa que solamente podemosescuchar sonidos de más de 20 oscilacionespor segundo, y de menos de 20,000oscilaciones por segundo).La amplitud se refiere al nivel (eléctrico oacústico), de tal suerte que a mayor amplitudmayor nivel (volumen), y viceversa. La amplitudse indica en dB. La figura 1.1 muestra 3 ondassonoras de menor a mayor amplitud.
Figura 1.1 Amplitud
1) Amplitud y Frecuencia1) Amplitud y Frecuencia1) Amplitud y Frecuencia1) Amplitud y Frecuencia1) Amplitud y Frecuencia
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
Menor Amplitud(Menor Volumen)
Mayor Amplitud(Mayor Volumen)
Guía para Self Powered ... 1.- Mediciones
1.3Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
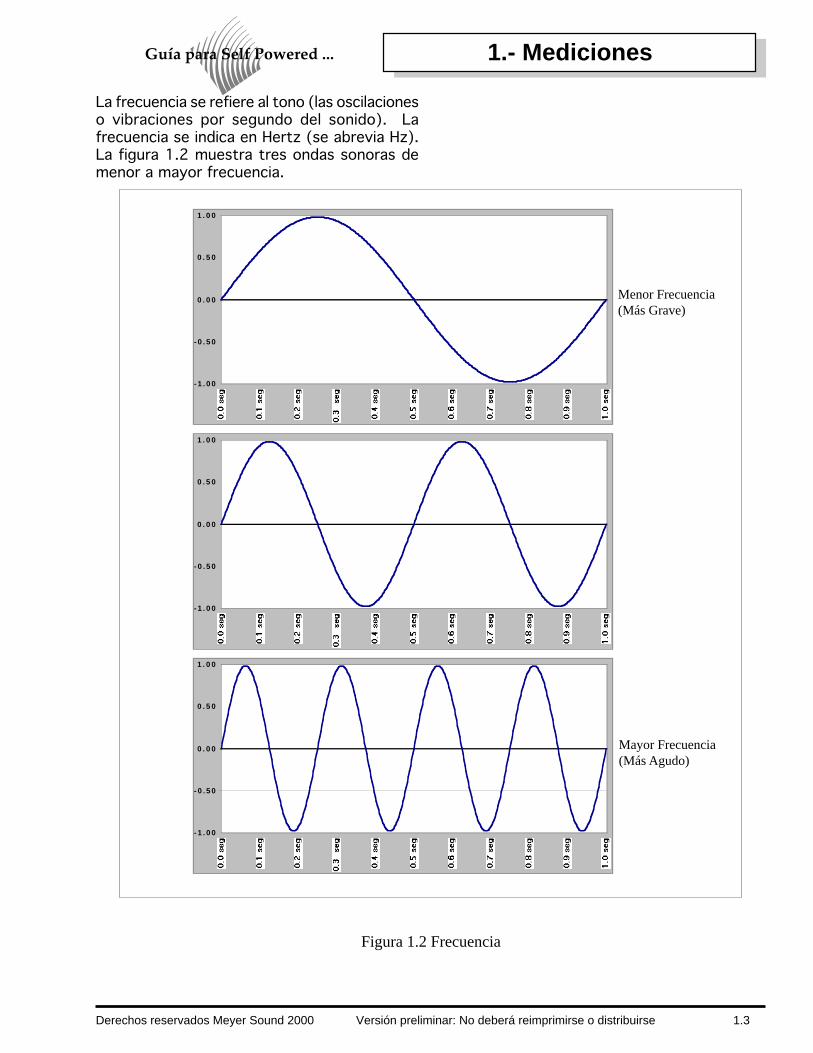
La frecuencia se refiere al tono (las oscilacioneso vibraciones por segundo del sonido). Lafrecuencia se indica en Hertz (se abrevia Hz).La figura 1.2 muestra tres ondas sonoras demenor a mayor frecuencia.
Figura 1.2 Frecuencia
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
Menor Frecuencia(Más Grave)
Mayor Frecuencia(Más Agudo)
Guía para Self Powered ... 1.- Mediciones
1.4Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
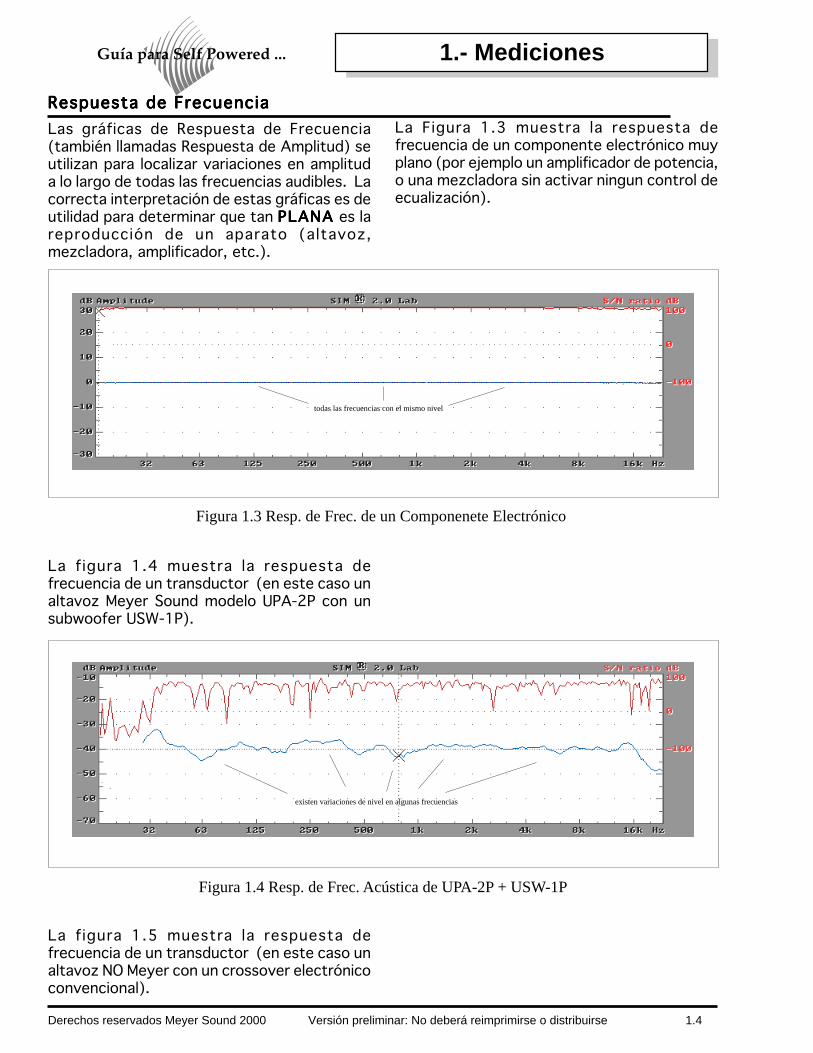
Respuesta de FrecuenciaRespuesta de FrecuenciaRespuesta de FrecuenciaRespuesta de FrecuenciaRespuesta de FrecuenciaLas gráficas de Respuesta de Frecuencia(también llamadas Respuesta de Amplitud) seutilizan para localizar variaciones en amplituda lo largo de todas las frecuencias audibles. Lacorrecta interpretación de estas gráficas es deutilidad para determinar que tan PLANA PLANA PLANA PLANA PLANA es lareproducción de un aparato (altavoz,mezcladora, amplificador, etc.).
La Figura 1.3 muestra la respuesta defrecuencia de un componente electrónico muyplano (por ejemplo un amplificador de potencia,o una mezcladora sin activar ningun control deecualización).
La figura 1.4 muestra la respuesta defrecuencia de un transductor (en este caso unaltavoz Meyer Sound modelo UPA-2P con unsubwoofer USW-1P).
La figura 1.5 muestra la respuesta defrecuencia de un transductor (en este caso unaltavoz NO Meyer con un crossover electrónicoconvencional).
Figura 1.3 Resp. de Frec. de un Componenete Electrónico
Figura 1.4 Resp. de Frec. Acústica de UPA-2P + USW-1P
todas las frecuencias con el mismo nivel
existen variaciones de nivel en algunas frecuencias
Guía para Self Powered ... 1.- Mediciones
1.5Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
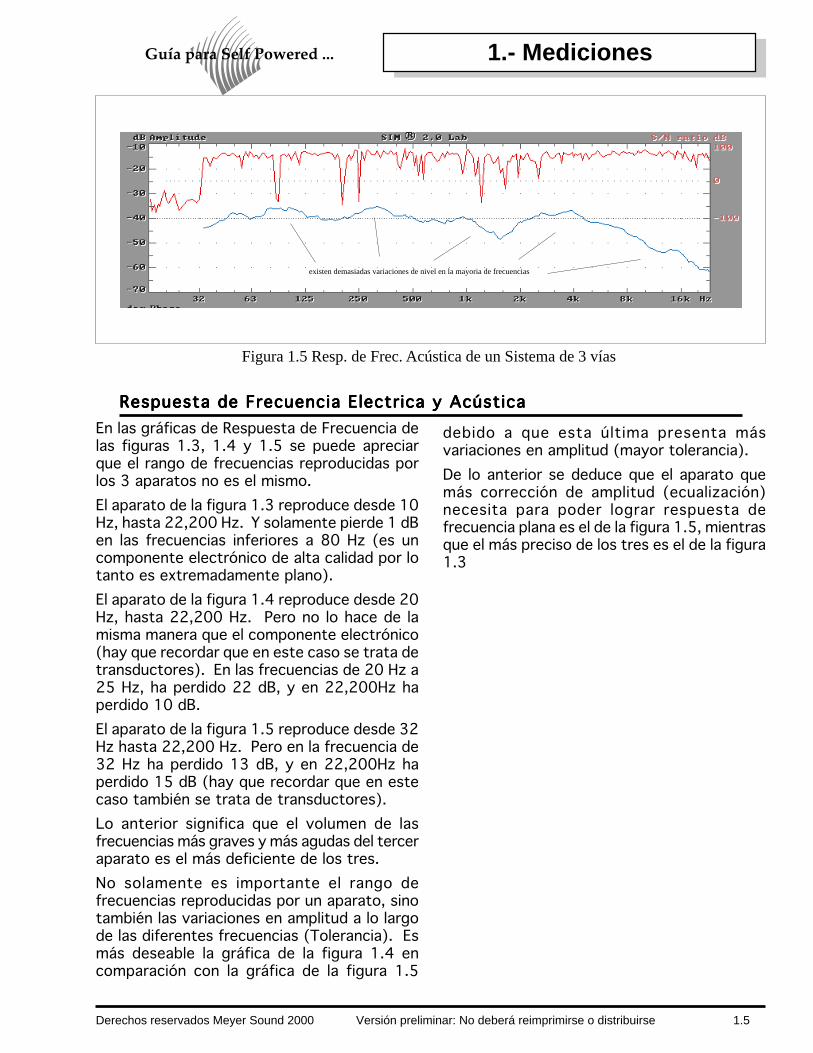
En las gráficas de Respuesta de Frecuencia delas figuras 1.3, 1.4 y 1.5 se puede apreciarque el rango de frecuencias reproducidas porlos 3 aparatos no es el mismo.El aparato de la figura 1.3 reproduce desde 10Hz, hasta 22,200 Hz. Y solamente pierde 1 dBen las frecuencias inferiores a 80 Hz (es uncomponente electrónico de alta calidad por lotanto es extremadamente plano).El aparato de la figura 1.4 reproduce desde 20Hz, hasta 22,200 Hz. Pero no lo hace de lamisma manera que el componente electrónico(hay que recordar que en este caso se trata detransductores). En las frecuencias de 20 Hz a25 Hz, ha perdido 22 dB, y en 22,200Hz haperdido 10 dB.El aparato de la figura 1.5 reproduce desde 32Hz hasta 22,200 Hz. Pero en la frecuencia de32 Hz ha perdido 13 dB, y en 22,200Hz haperdido 15 dB (hay que recordar que en estecaso también se trata de transductores).Lo anterior significa que el volumen de lasfrecuencias más graves y más agudas del terceraparato es el más deficiente de los tres.No solamente es importante el rango defrecuencias reproducidas por un aparato, sinotambién las variaciones en amplitud a lo largode las diferentes frecuencias (Tolerancia). Esmás deseable la gráfica de la figura 1.4 encomparación con la gráfica de la figura 1.5
Respuesta de Frecuencia Electrica y AcústicaRespuesta de Frecuencia Electrica y AcústicaRespuesta de Frecuencia Electrica y AcústicaRespuesta de Frecuencia Electrica y AcústicaRespuesta de Frecuencia Electrica y Acústica
debido a que esta última presenta másvariaciones en amplitud (mayor tolerancia).De lo anterior se deduce que el aparato quemás corrección de amplitud (ecualización)necesita para poder lograr respuesta defrecuencia plana es el de la figura 1.5, mientrasque el más preciso de los tres es el de la figura1.3
Figura 1.5 Resp. de Frec. Acústica de un Sistema de 3 vías
existen demasiadas variaciones de nivel en la mayoria de frecuencias
Guía para Self Powered ... 1.- Mediciones
1.6Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
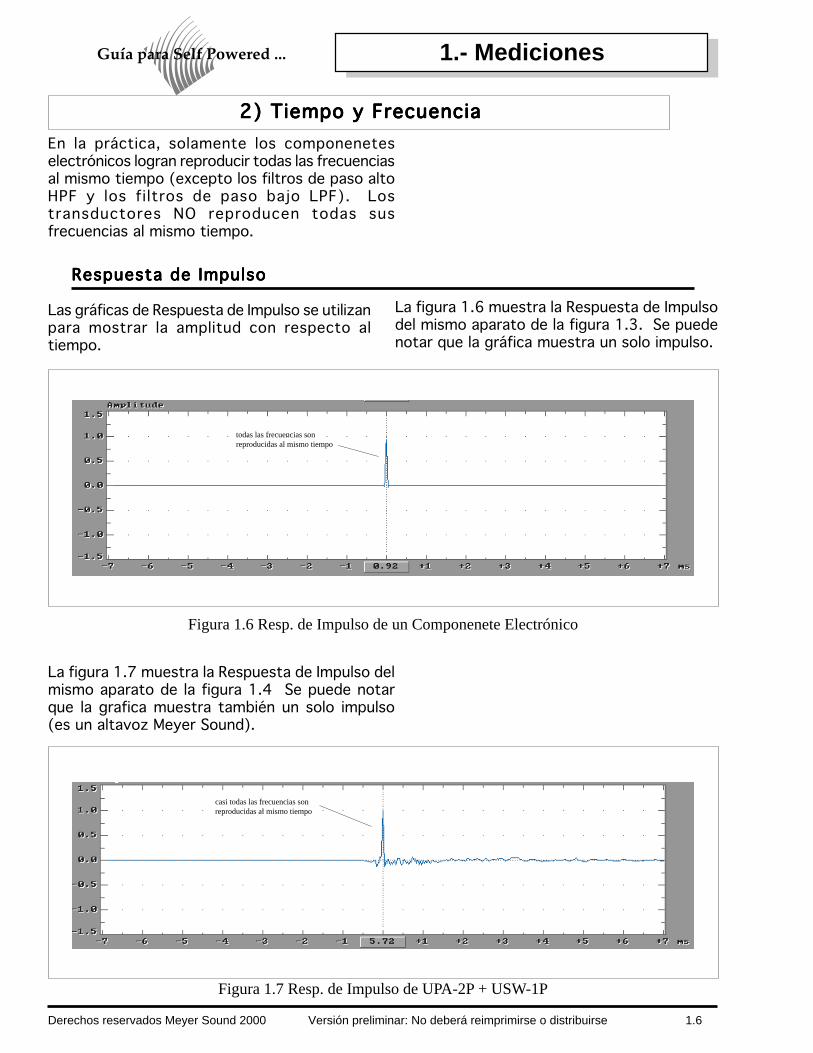
En la práctica, solamente los componeneteselectrónicos logran reproducir todas las frecuenciasal mismo tiempo (excepto los filtros de paso altoHPF y los filtros de paso bajo LPF). Lostransductores NO reproducen todas susfrecuencias al mismo tiempo.
2) Tiempo y Frecuencia2) Tiempo y Frecuencia2) Tiempo y Frecuencia2) Tiempo y Frecuencia2) Tiempo y Frecuencia
Respuesta de ImpulsoRespuesta de ImpulsoRespuesta de ImpulsoRespuesta de ImpulsoRespuesta de Impulso
Las gráficas de Respuesta de Impulso se utilizanpara mostrar la amplitud con respecto altiempo.
La figura 1.7 muestra la Respuesta de Impulso delmismo aparato de la figura 1.4 Se puede notarque la grafica muestra también un solo impulso(es un altavoz Meyer Sound).
La figura 1.6 muestra la Respuesta de Impulsodel mismo aparato de la figura 1.3. Se puedenotar que la gráfica muestra un solo impulso.
Figura 1.6 Resp. de Impulso de un Componenete Electrónico
todas las frecuencias sonreproducidas al mismo tiempo
casi todas las frecuencias sonreproducidas al mismo tiempo
Figura 1.7 Resp. de Impulso de UPA-2P + USW-1P
Guía para Self Powered ... 1.- Mediciones
1.7Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
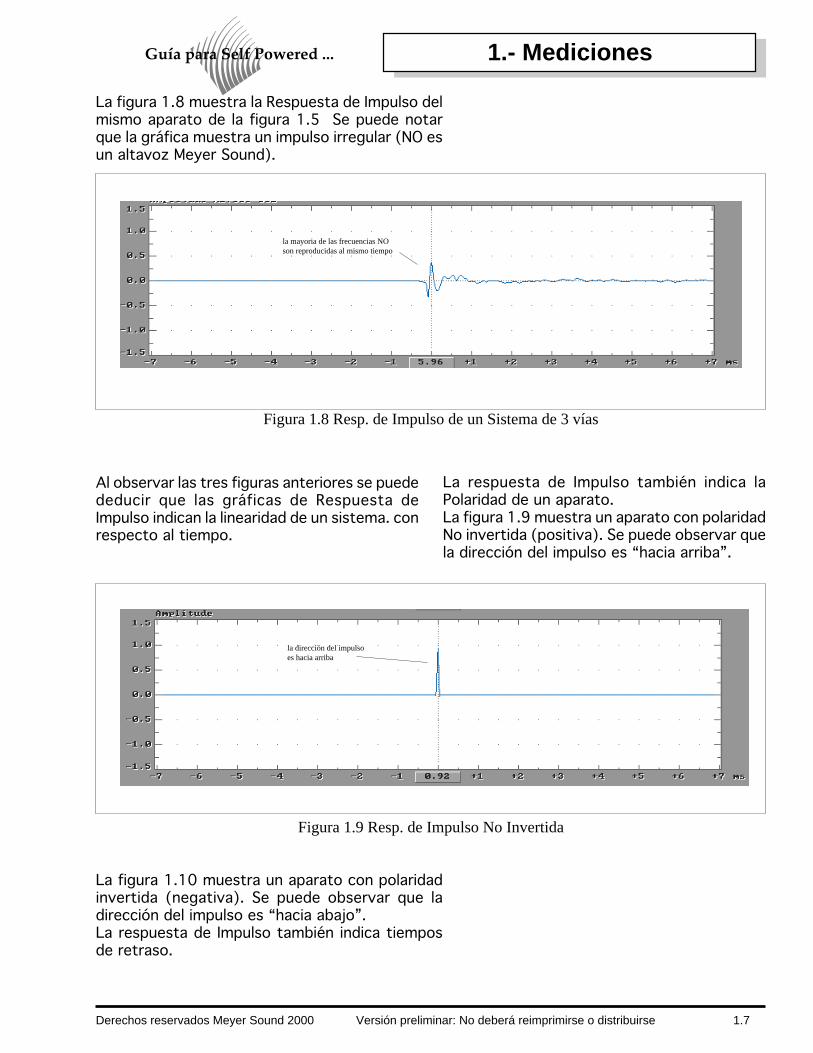
La figura 1.8 muestra la Respuesta de Impulso delmismo aparato de la figura 1.5 Se puede notarque la gráfica muestra un impulso irregular (NO esun altavoz Meyer Sound).
Al observar las tres figuras anteriores se puedededucir que las gráficas de Respuesta deImpulso indican la linearidad de un sistema. conrespecto al tiempo.
La respuesta de Impulso también indica laPolaridad de un aparato.La figura 1.9 muestra un aparato con polaridadNo invertida (positiva). Se puede observar quela dirección del impulso es “hacia arriba”.
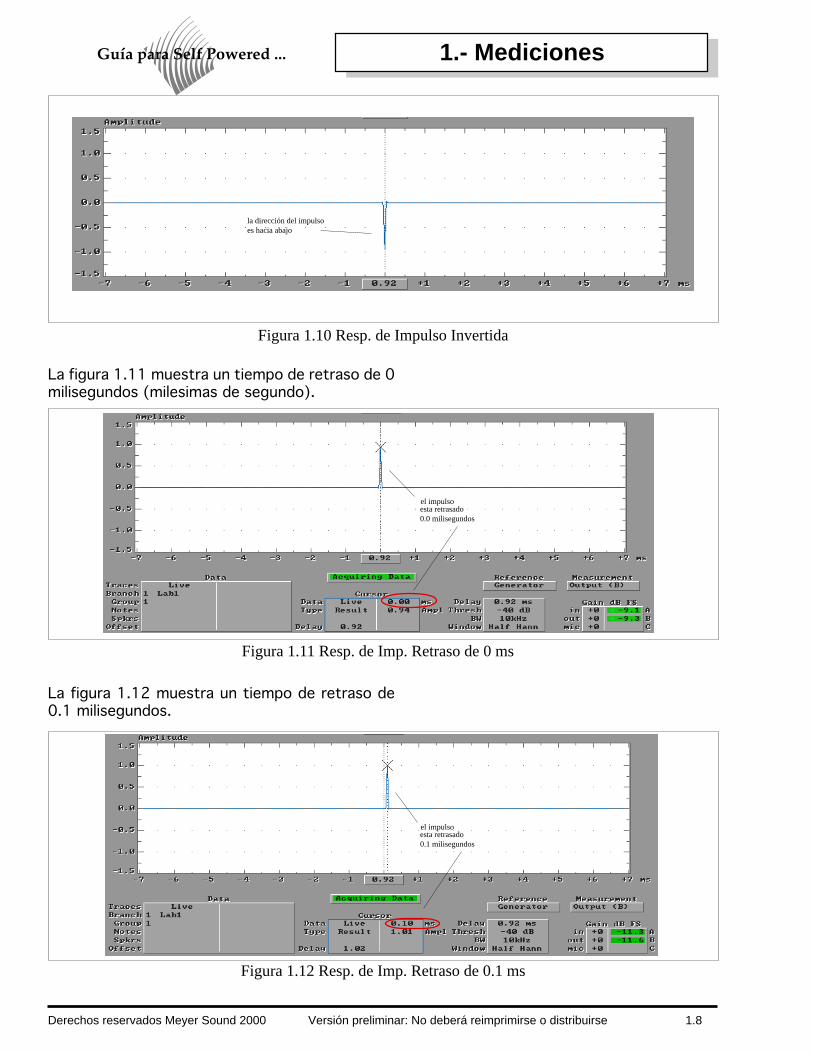
La figura 1.10 muestra un aparato con polaridadinvertida (negativa). Se puede observar que ladirección del impulso es “hacia abajo”.La respuesta de Impulso también indica tiemposde retraso.
la mayoria de las frecuencias NOson reproducidas al mismo tiempo
la dirección del impulsoes hacia arriba
Figura 1.8 Resp. de Impulso de un Sistema de 3 vías
Figura 1.9 Resp. de Impulso No Invertida
Guía para Self Powered ... 1.- Mediciones
1.8Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
La figura 1.11 muestra un tiempo de retraso de 0milisegundos (milesimas de segundo).
La figura 1.12 muestra un tiempo de retraso de0.1 milisegundos.
Figura 1.10 Resp. de Impulso Invertida
Figura 1.11 Resp. de Imp. Retraso de 0 ms
la dirección del impulsoes hacia abajo
esta retrasado0.0 milisegundos
el impulso
Figura 1.12 Resp. de Imp. Retraso de 0.1 ms
esta retrasado0.1 milisegundos
el impulso
Guía para Self Powered ... 1.- Mediciones
1.9Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
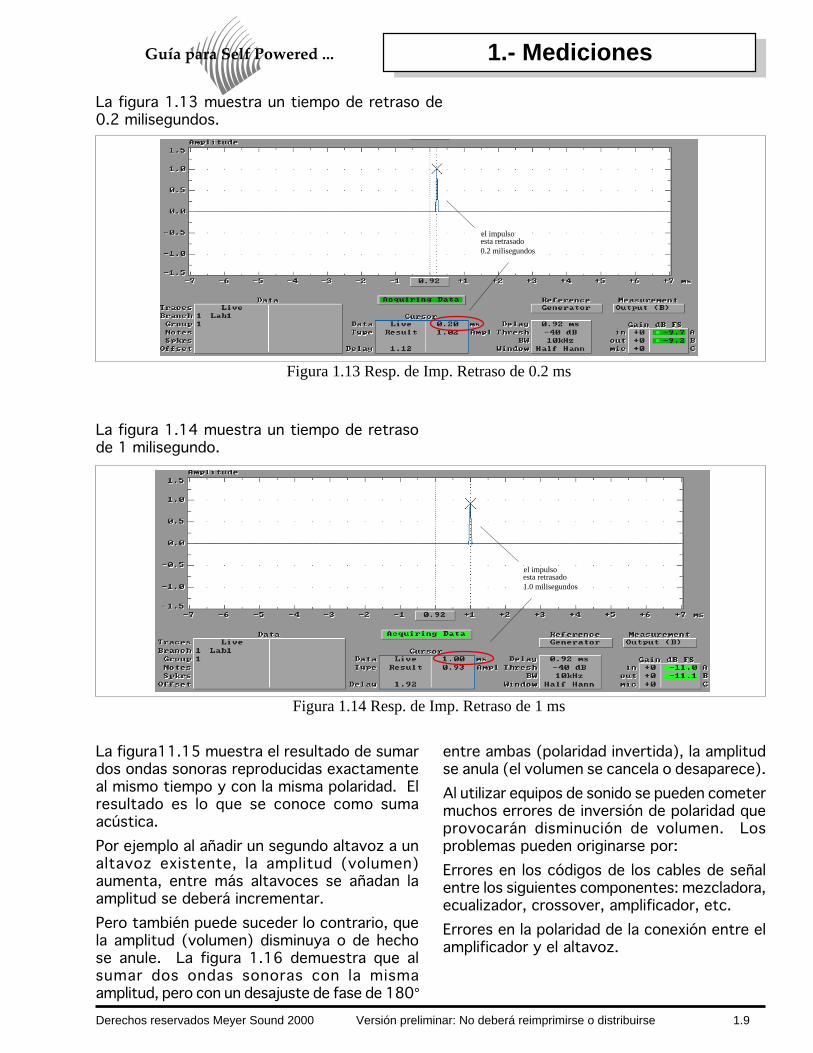
La figura 1.13 muestra un tiempo de retraso de0.2 milisegundos.
La figura 1.14 muestra un tiempo de retrasode 1 milisegundo.
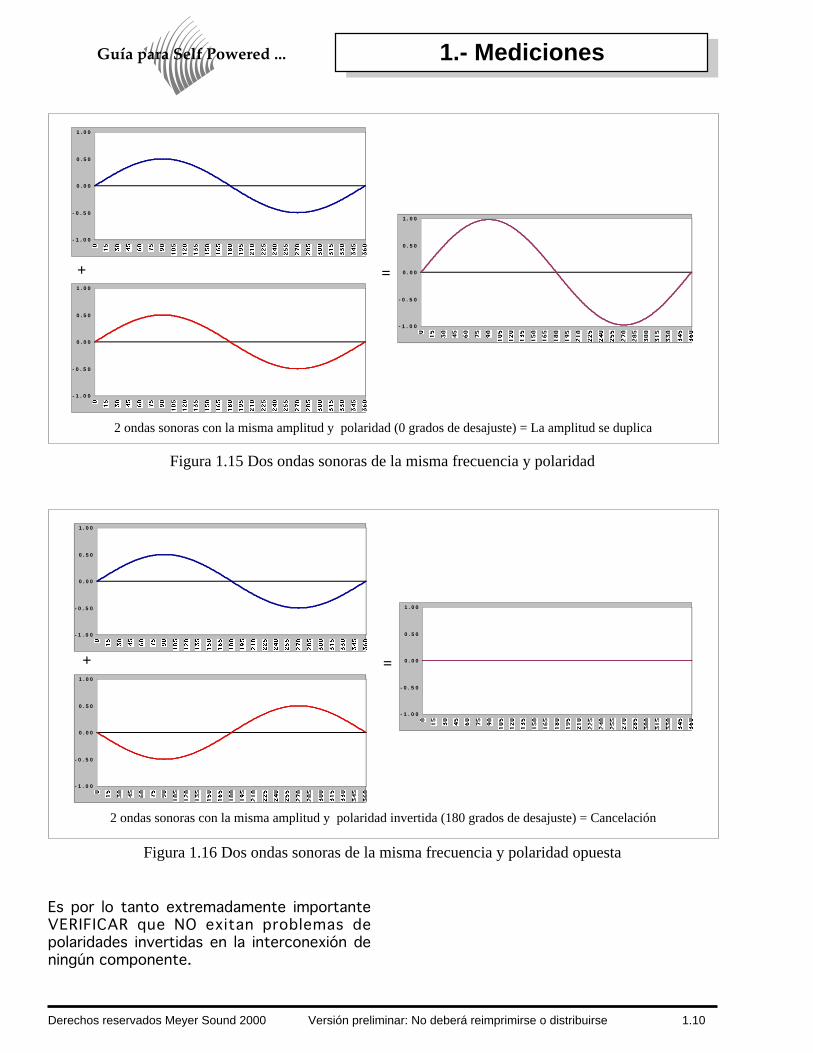
La figura11.15 muestra el resultado de sumardos ondas sonoras reproducidas exactamenteal mismo tiempo y con la misma polaridad. Elresultado es lo que se conoce como sumaacústica.Por ejemplo al añadir un segundo altavoz a unaltavoz existente, la amplitud (volumen)aumenta, entre más altavoces se añadan laamplitud se deberá incrementar.Pero también puede suceder lo contrario, quela amplitud (volumen) disminuya o de hechose anule. La figura 1.16 demuestra que alsumar dos ondas sonoras con la mismaamplitud, pero con un desajuste de fase de 180°
entre ambas (polaridad invertida), la amplitudse anula (el volumen se cancela o desaparece).Al utilizar equipos de sonido se pueden cometermuchos errores de inversión de polaridad queprovocarán disminución de volumen. Losproblemas pueden originarse por:Errores en los códigos de los cables de señalentre los siguientes componentes: mezcladora,ecualizador, crossover, amplificador, etc.Errores en la polaridad de la conexión entre elamplificador y el altavoz.
Figura 1.13 Resp. de Imp. Retraso de 0.2 ms
Figura 1.14 Resp. de Imp. Retraso de 1 ms
esta retrasado0.2 milisegundos
el impulso
esta retrasado1.0 milisegundos
el impulso
Guía para Self Powered ... 1.- Mediciones
1.10Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
Figura 1.15 Dos ondas sonoras de la misma frecuencia y polaridad
Figura 1.16 Dos ondas sonoras de la misma frecuencia y polaridad opuesta
Es por lo tanto extremadamente importanteVERIFICAR que NO exitan problemas depolaridades invertidas en la interconexión deningún componente.
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
+ =
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
+ =
2 ondas sonoras con la misma amplitud y polaridad (0 grados de desajuste) = La amplitud se duplica
2 ondas sonoras con la misma amplitud y polaridad invertida (180 grados de desajuste) = Cancelación
Guía para Self Powered ... 1.- Mediciones
1.11Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
0 grados de retraso
90 grados de retraso(1/4 de ciclo de retraso)
180 grados de retraso(1/2 ciclo de retaso)inversion de polaridad
270 grados de retraso(3/4 de ciclo de retraso)
360 grados de retraso(1 ciclo de retraso)
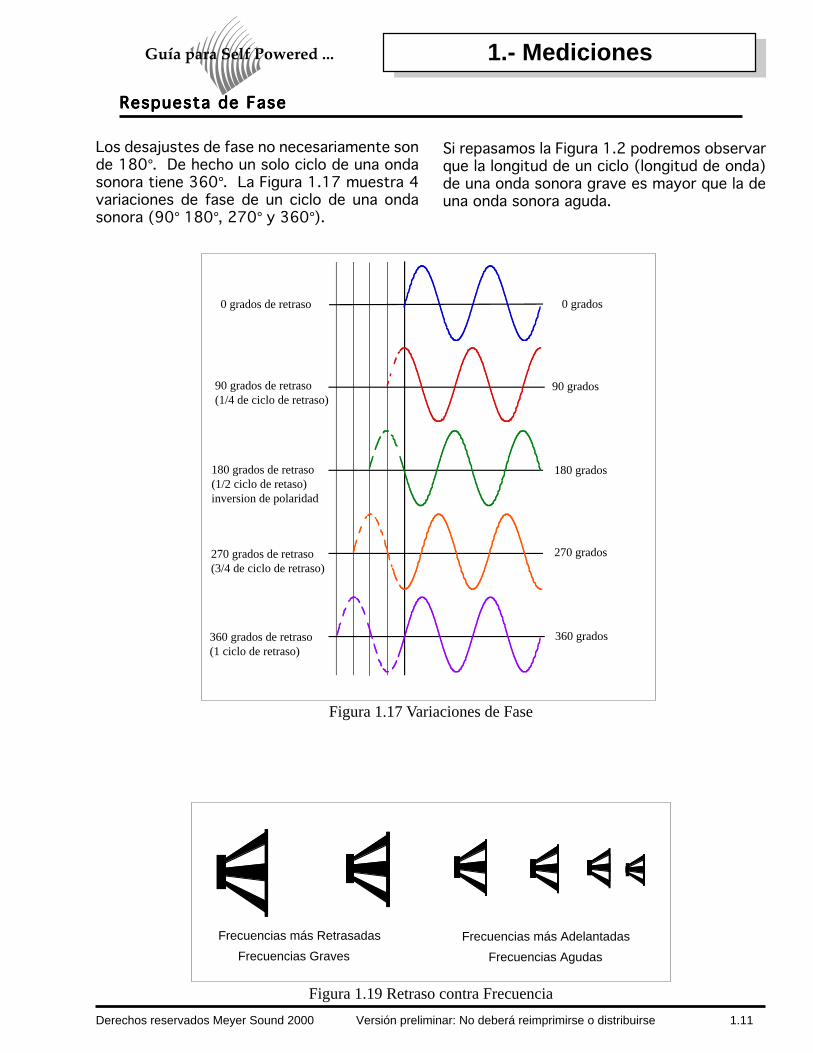
Figura 1.17 Variaciones de Fase
Frecuencias más Retrasadas Frecuencias más Adelantadas
Frecuencias Graves Frecuencias Agudas
Figura 1.19 Retraso contra Frecuencia
Respuesta de FaseRespuesta de FaseRespuesta de FaseRespuesta de FaseRespuesta de Fase
Los desajustes de fase no necesariamente sonde 180°. De hecho un solo ciclo de una ondasonora tiene 360°. La Figura 1.17 muestra 4variaciones de fase de un ciclo de una ondasonora (90° 180°, 270° y 360°).
Si repasamos la Figura 1.2 podremos observarque la longitud de un ciclo (longitud de onda)de una onda sonora grave es mayor que la deuna onda sonora aguda.
0 grados
90 grados
180 grados
270 grados
360 grados
Guía para Self Powered ... 1.- Mediciones
1.12Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
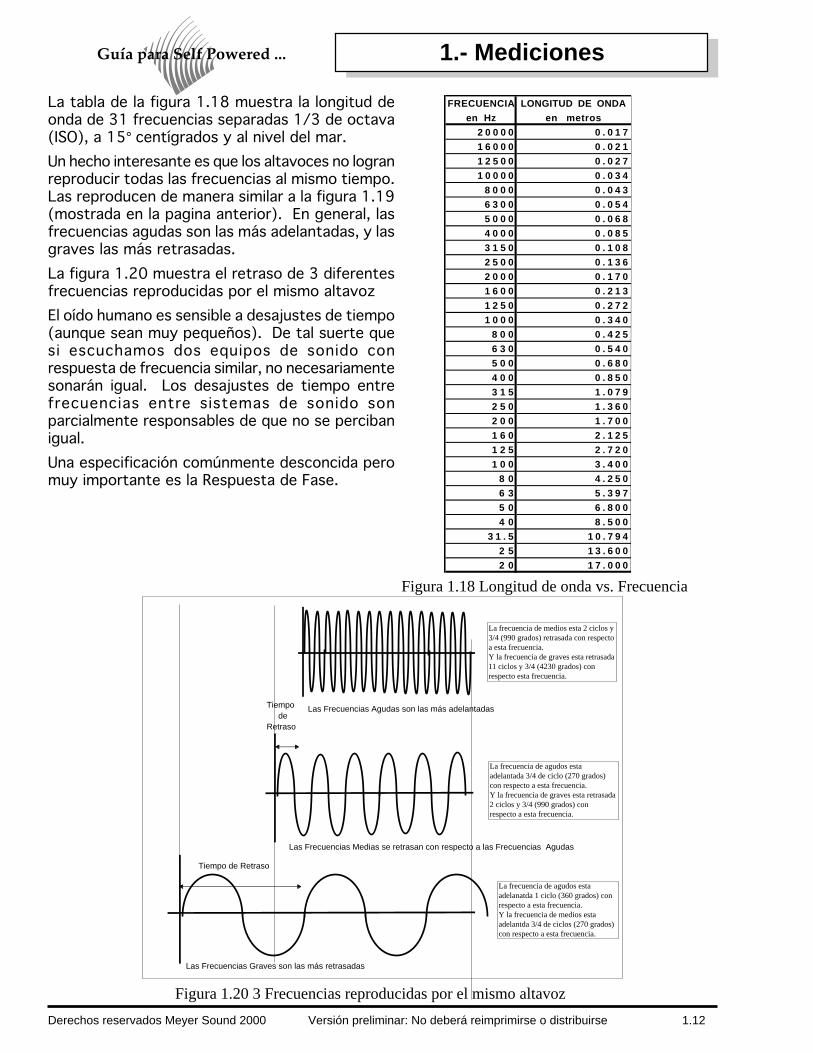
La tabla de la figura 1.18 muestra la longitud deonda de 31 frecuencias separadas 1/3 de octava(ISO), a 15° centígrados y al nivel del mar.Un hecho interesante es que los altavoces no logranreproducir todas las frecuencias al mismo tiempo.Las reproducen de manera similar a la figura 1.19(mostrada en la pagina anterior). En general, lasfrecuencias agudas son las más adelantadas, y lasgraves las más retrasadas.La figura 1.20 muestra el retraso de 3 diferentesfrecuencias reproducidas por el mismo altavozEl oído humano es sensible a desajustes de tiempo(aunque sean muy pequeños). De tal suerte quesi escuchamos dos equipos de sonido conrespuesta de frecuencia similar, no necesariamentesonarán igual. Los desajustes de tiempo entrefrecuencias entre sistemas de sonido sonparcialmente responsables de que no se percibanigual.Una especificación comúnmente desconcida peromuy importante es la Respuesta de Fase.
Las Frecuencias Agudas son las más adelantadas
Las Frecuencias Medias se retrasan con respecto a las Frecuencias Agudas
Las Frecuencias Graves son las más retrasadas
Tiempo de Retraso
Tiempo deRetraso
Figura 1.20 3 Frecuencias reproducidas por el mismo altavoz
Figura 1.18 Longitud de onda vs. Frecuencia
FRECUENCIA LONGITUD DE ONDA
en Hz en metros
2 0 0 0 0 0 . 0 1 7
1 6 0 0 0 0 . 0 2 1
1 2 5 0 0 0 . 0 2 7
1 0 0 0 0 0 . 0 3 4
8 0 0 0 0 . 0 4 3
6 3 0 0 0 . 0 5 4
5 0 0 0 0 . 0 6 8
4 0 0 0 0 . 0 8 5
3 1 5 0 0 . 1 0 8
2 5 0 0 0 . 1 3 6
2 0 0 0 0 . 1 7 0
1 6 0 0 0 . 2 1 3
1 2 5 0 0 . 2 7 2
1 0 0 0 0 . 3 4 0
8 0 0 0 . 4 2 5
6 3 0 0 . 5 4 0
5 0 0 0 . 6 8 0
4 0 0 0 . 8 5 0
3 1 5 1 . 0 7 9
2 5 0 1 . 3 6 0
2 0 0 1 . 7 0 0
1 6 0 2 . 1 2 5
1 2 5 2 . 7 2 0
1 0 0 3 . 4 0 0
8 0 4 . 2 5 0
6 3 5 . 3 9 7
5 0 6 . 8 0 0
4 0 8 . 5 0 0
3 1 . 5 1 0 . 7 9 4
2 5 1 3 . 6 0 0
2 0 1 7 . 0 0 0
La frecuencia de medios esta 2 ciclos y3/4 (990 grados) retrasada con respectoa esta frecuencia.Y la frecuencia de graves esta retrasada11 ciclos y 3/4 (4230 grados) conrespecto esta frecuencia.
La frecuencia de agudos estaadelantada 3/4 de ciclo (270 grados)con respecto a esta frecuencia.Y la frecuencia de graves esta retrasada2 ciclos y 3/4 (990 grados) conrespecto a esta frecuencia.
La frecuencia de agudos estaadelanatda 1 ciclo (360 grados) conrespecto a esta frecuencia.Y la frecuencia de medios estaadelantda 3/4 de ciclos (270 grados)con respecto a esta frecuencia.
Guía para Self Powered ... 1.- Mediciones
1.13Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
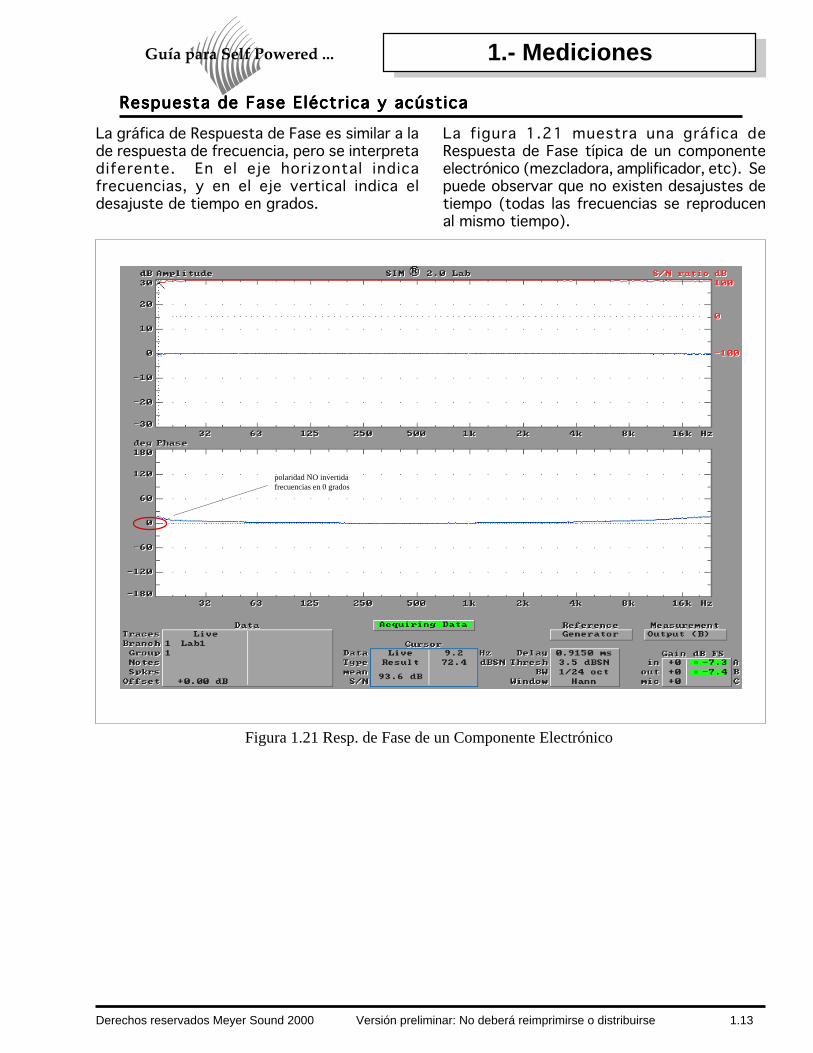
La gráfica de Respuesta de Fase es similar a lade respuesta de frecuencia, pero se interpretadiferente. En el eje horizontal indicafrecuencias, y en el eje vertical indica eldesajuste de tiempo en grados.
Respuesta de Fase Eléctrica y acústicaRespuesta de Fase Eléctrica y acústicaRespuesta de Fase Eléctrica y acústicaRespuesta de Fase Eléctrica y acústicaRespuesta de Fase Eléctrica y acústica
La figura 1.21 muestra una gráfica deRespuesta de Fase típica de un componenteelectrónico (mezcladora, amplificador, etc). Sepuede observar que no existen desajustes detiempo (todas las frecuencias se reproducenal mismo tiempo).
Figura 1.21 Resp. de Fase de un Componente Electrónico
polaridad NO invertidafrecuencias en 0 grados
Guía para Self Powered ... 1.- Mediciones
1.14Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
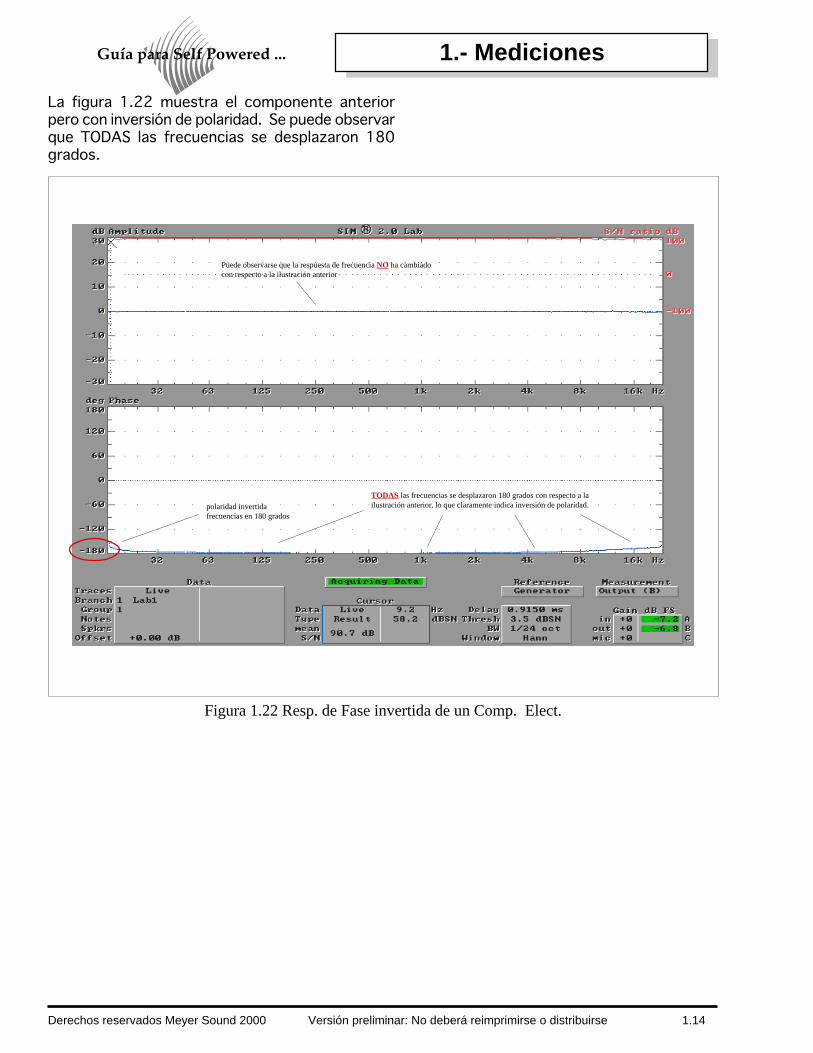
La figura 1.22 muestra el componente anteriorpero con inversión de polaridad. Se puede observarque TODAS las frecuencias se desplazaron 180grados.
Figura 1.22 Resp. de Fase invertida de un Comp. Elect.
polaridad invertidafrecuencias en 180 grados
TODAS las frecuencias se desplazaron 180 grados con respecto a lailustración anterior, lo que claramente indica inversión de polaridad.
Puede observarse que la respuesta de frecuencia NO ha cambiadocon respecto a la ilustración anterior
Guía para Self Powered ... 1.- Mediciones
1.15Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
1260
1200
1140
1080
1020
960
900
840
780
720
660
600
540
480
420
360
300
240
180
120
60
0
-60
-120
-180
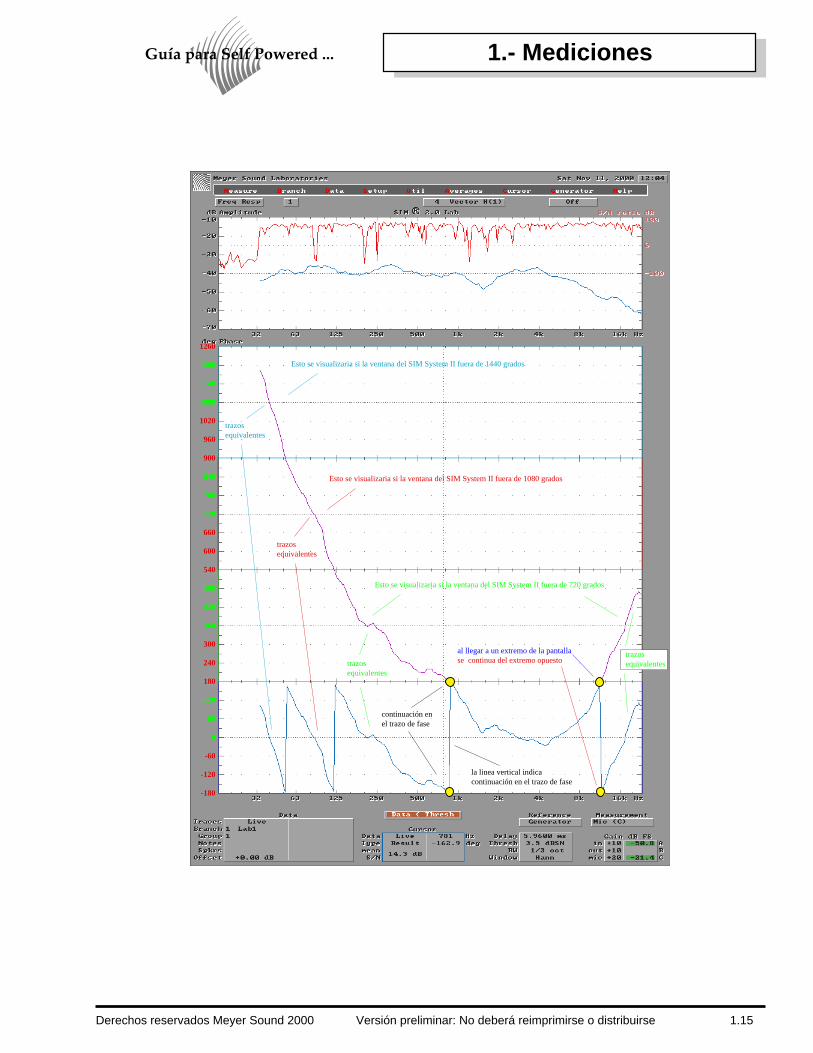
al llegar a un extremo de la pantallase continua del extremo opuesto
la linea vertical indicacontinuación en el trazo de fase
Esto se visualizaria si la ventana del SIM System II fuera de 720 grados
Esto se visualizaria si la ventana del SIM System II fuera de 1080 grados
Esto se visualizaria si la ventana del SIM System II fuera de 1440 grados
continuación enel trazo de fase
trazosequivalentes
trazosequivalentes
trazosequivalentes
trazosequivalentes
Guía para Self Powered ... 1.- Mediciones
1.16Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
1260
1200
1140
1080
1020
960
900
840
780
720
660
600
540
480
420
360
300
240
180
120
60
0
-60
-120
-180
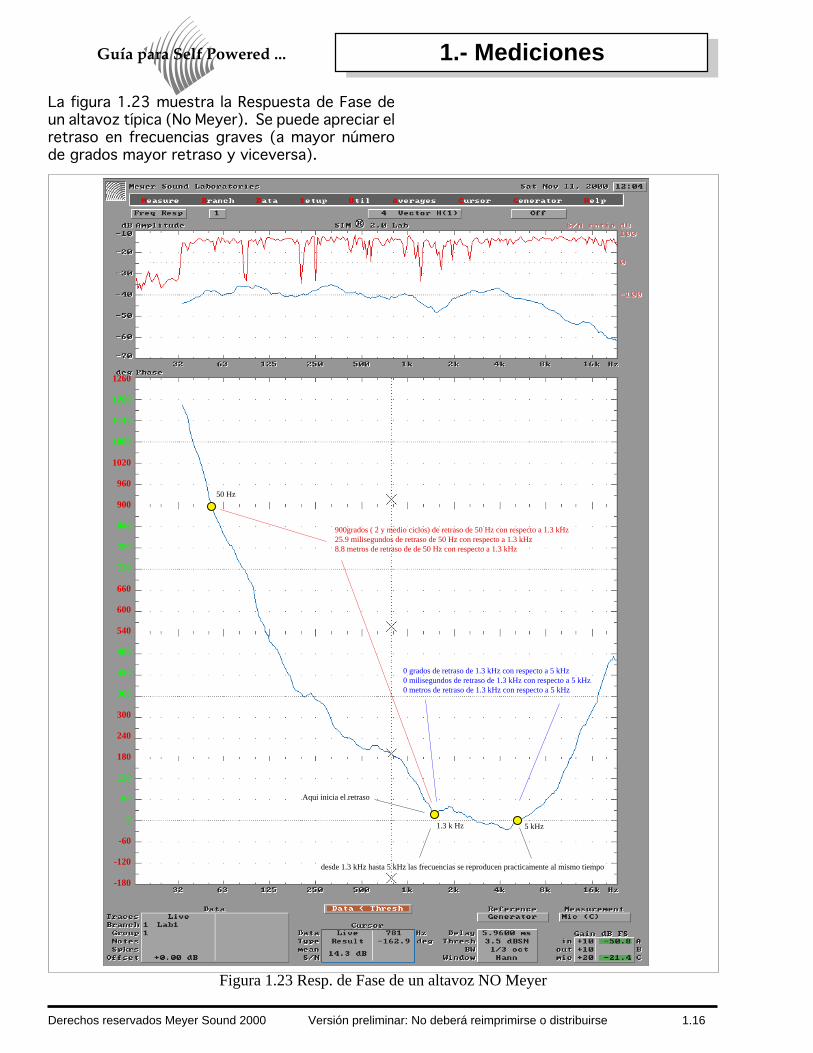
La figura 1.23 muestra la Respuesta de Fase deun altavoz típica (No Meyer). Se puede apreciar elretraso en frecuencias graves (a mayor númerode grados mayor retraso y viceversa).
Figura 1.23 Resp. de Fase de un altavoz NO Meyer
desde 1.3 kHz hasta 5 kHz las frecuencias se reproducen practicamente al mismo tiempo
900grados ( 2 y medio ciclos) de retraso de 50 Hz con respecto a 1.3 kHz25.9 milisegundos de retraso de 50 Hz con respecto a 1.3 kHz8.8 metros de retraso de de 50 Hz con respecto a 1.3 kHz
0 grados de retraso de 1.3 kHz con respecto a 5 kHz0 milisegundos de retraso de 1.3 kHz con respecto a 5 kHz0 metros de retraso de 1.3 kHz con respecto a 5 kHz
50 Hz
1.3 k Hz 5 kHz
Aqui inicia el retraso
Guía para Self Powered ... 1.- Mediciones
1.17Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
900
840
780
720
660
600
540
480
420
360
300
240
180
120
60
0
-60
-120
-180
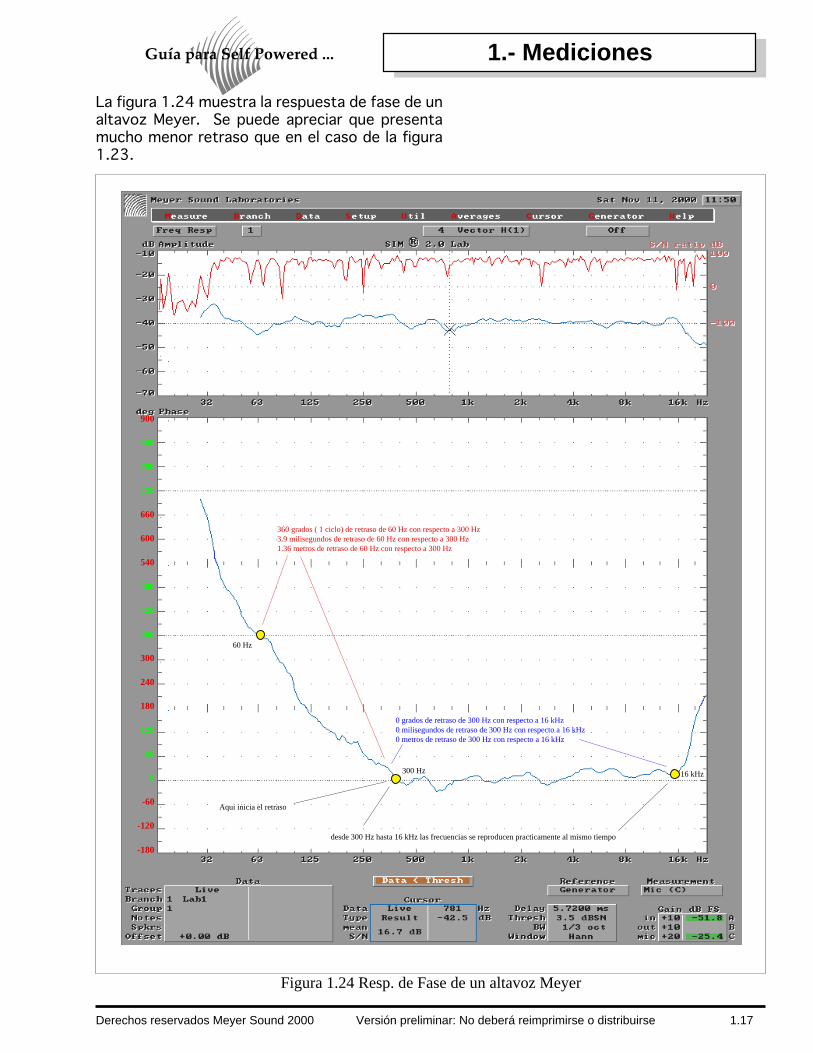
La figura 1.24 muestra la respuesta de fase de unaltavoz Meyer. Se puede apreciar que presentamucho menor retraso que en el caso de la figura1.23.
Figura 1.24 Resp. de Fase de un altavoz Meyer
desde 300 Hz hasta 16 kHz las frecuencias se reproducen practicamente al mismo tiempo
360 grados ( 1 ciclo) de retraso de 60 Hz con respecto a 300 Hz3.9 milisegundos de retraso de 60 Hz con respecto a 300 Hz1.36 metros de retraso de 60 Hz con respecto a 300 Hz
0 grados de retraso de 300 Hz con respecto a 16 kHz0 milisegundos de retraso de 300 Hz con respecto a 16 kHz0 metros de retraso de 300 Hz con respecto a 16 kHz
60 Hz
300 Hz 16 kHz
Aqui inicia el retraso
Guía para Self Powered ... 1.- Mediciones
1.18Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
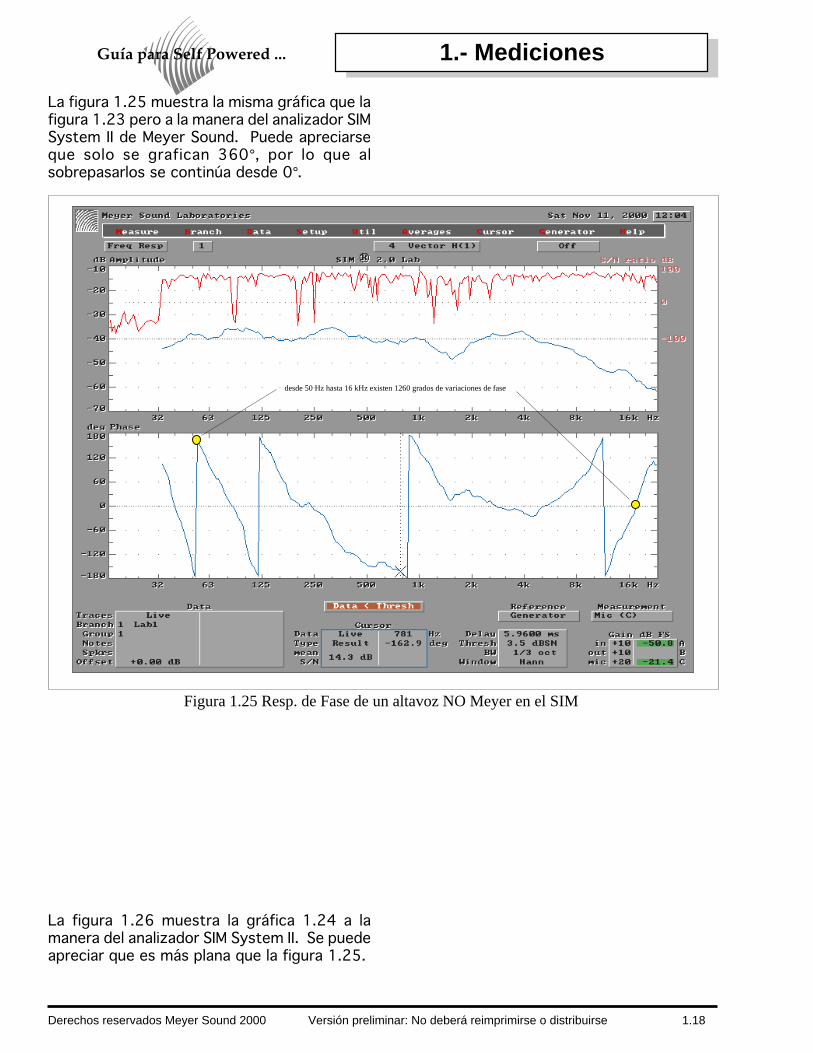
La figura 1.25 muestra la misma gráfica que lafigura 1.23 pero a la manera del analizador SIMSystem II de Meyer Sound. Puede apreciarseque solo se grafican 360°, por lo que alsobrepasarlos se continúa desde 0°.
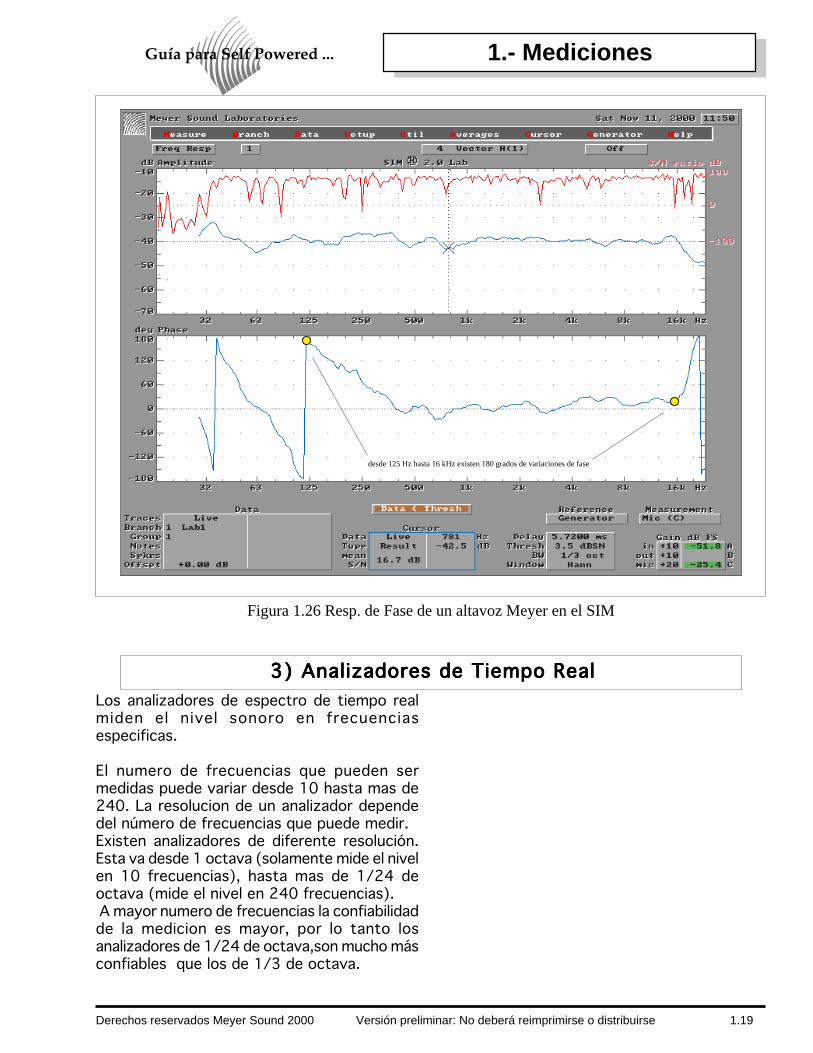
La figura 1.26 muestra la gráfica 1.24 a lamanera del analizador SIM System II. Se puedeapreciar que es más plana que la figura 1.25.
Figura 1.25 Resp. de Fase de un altavoz NO Meyer en el SIM
desde 50 Hz hasta 16 kHz existen 1260 grados de variaciones de fase
Guía para Self Powered ... 1.- Mediciones
1.19Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
Los analizadores de espectro de tiempo realmiden el nivel sonoro en frecuenciasespecificas.
El numero de frecuencias que pueden sermedidas puede variar desde 10 hasta mas de240. La resolucion de un analizador dependedel número de frecuencias que puede medir.Existen analizadores de diferente resolución.Esta va desde 1 octava (solamente mide el nivelen 10 frecuencias), hasta mas de 1/24 deoctava (mide el nivel en 240 frecuencias). A mayor numero de frecuencias la confiabilidadde la medicion es mayor, por lo tanto losanalizadores de 1/24 de octava,son mucho másconfiables que los de 1/3 de octava.
3) Analizadores de Tiempo Real3) Analizadores de Tiempo Real3) Analizadores de Tiempo Real3) Analizadores de Tiempo Real3) Analizadores de Tiempo Real
Figura 1.26 Resp. de Fase de un altavoz Meyer en el SIM
desde 125 Hz hasta 16 kHz existen 180 grados de variaciones de fase
Guía para Self Powered ... 1.- Mediciones
1.20Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
- 1 5 . 0 0
- 1 2 . 0 0
- 9 . 0 0
- 6 . 0 0
- 3 . 0 0
0 . 0 0
3 . 0 0
6 . 0 0
9 . 0 0
1 2 . 0 0
1 5 . 0 0
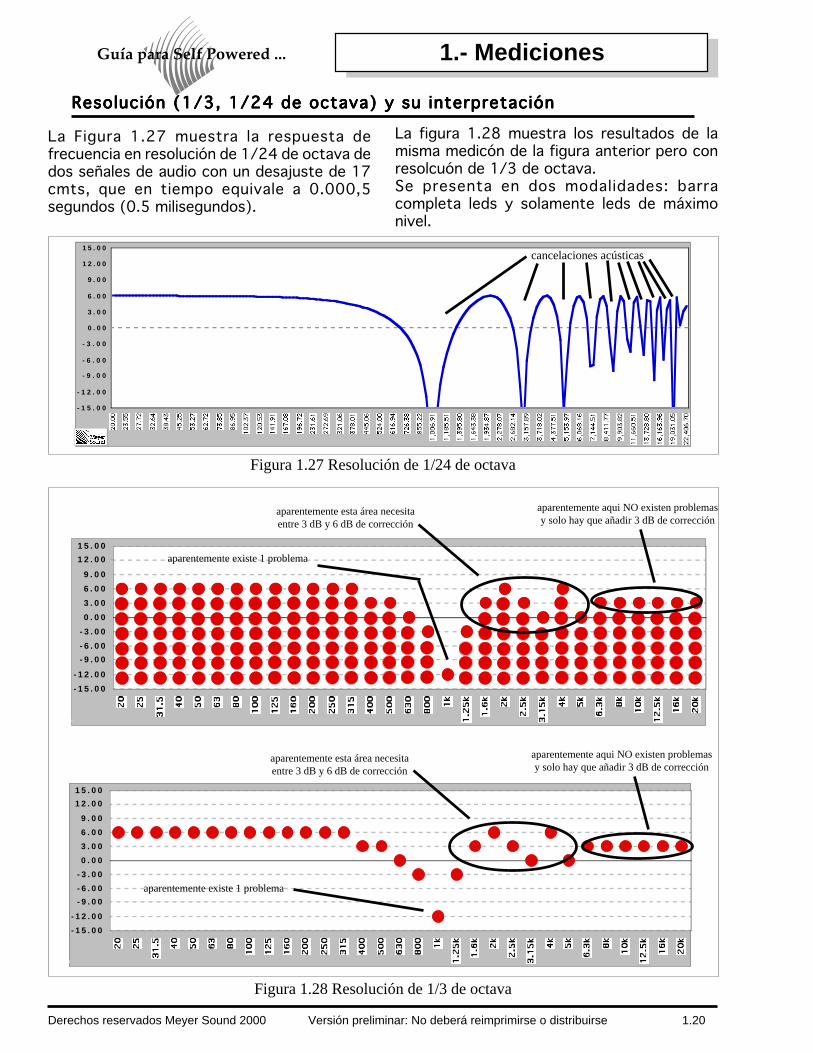
La Figura 1.27 muestra la respuesta defrecuencia en resolución de 1/24 de octava dedos señales de audio con un desajuste de 17cmts, que en tiempo equivale a 0.000,5segundos (0.5 milisegundos).
Resolución (1/3, 1/24 de octava) y su interpretaciónResolución (1/3, 1/24 de octava) y su interpretaciónResolución (1/3, 1/24 de octava) y su interpretaciónResolución (1/3, 1/24 de octava) y su interpretaciónResolución (1/3, 1/24 de octava) y su interpretación
La figura 1.28 muestra los resultados de lamisma medicón de la figura anterior pero conresolcuón de 1/3 de octava.Se presenta en dos modalidades: barracompleta leds y solamente leds de máximonivel.
Figura 1.28 Resolución de 1/3 de octava
- 1 5 . 0 0
- 1 2 . 0 0
- 9 . 0 0
- 6 . 0 0
- 3 . 0 0
0 . 0 0
3 . 0 0
6 . 0 0
9 . 0 0
1 2 . 0 0
1 5 . 0 0
Figura 1.27 Resolución de 1/24 de octava
cancelaciones acústicas
- 1 5 . 0 0
- 1 2 . 0 0
- 9 . 0 0
- 6 . 0 0
- 3 . 0 0
0 . 0 0
3 . 0 0
6 . 0 0
9 . 0 0
1 2 . 0 0
1 5 . 0 0
aparentemente existe 1 problema
aparentemente aqui NO existen problemasy solo hay que añadir 3 dB de corrección
aparentemente esta área necesitaentre 3 dB y 6 dB de corrección
aparentemente existe 1 problema
aparentemente aqui NO existen problemasy solo hay que añadir 3 dB de corrección
aparentemente esta área necesitaentre 3 dB y 6 dB de corrección
Guía para Self Powered ... 1.- Mediciones
1.21Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
Mientras que en alta resolución (1/24 deoctava), pueden descubrirse las cancelacionesacústicas características del llamado Filtro dePeine (Comb Filtering), al observar la mismamedición en baja resolución (1/3 de octava),no se observan los mismos problemas.
Al interpretar la medición de baja resolución(fig. 1.28) se puede llegar a concluirerroneamente que las frecuencias de 3,150 Hz,5,000 Hz y 12,500 Hz pueden ser ecualizadasañadiendo 12 dB, 6 dB y 3 dB en dichasfrecuencias respectivamente.
Al interpretar la medición en alta resolución (fig.1.27) se puede determinar que el sistema NOpuede ser ecualizado debido a que la graficamuestra el efecto característico del Filtro dePeine. El Filtro de Peine es resultado de undesajuste de tiempo entre dos o más señalesde audio (¡altavoces!), en este caso 0.5milisegundos (8.5 cm).
La lectura en alta resolución muestra que elproblema en el sistema, no es un asunto deecualización, sino de tiempo. Mientras que en1/3 de octava no se puede localizar el Filtrode Peine, al utilizar 1/24 de Octava deresolución si se pueden detectar problemas deFiltro de Peine.
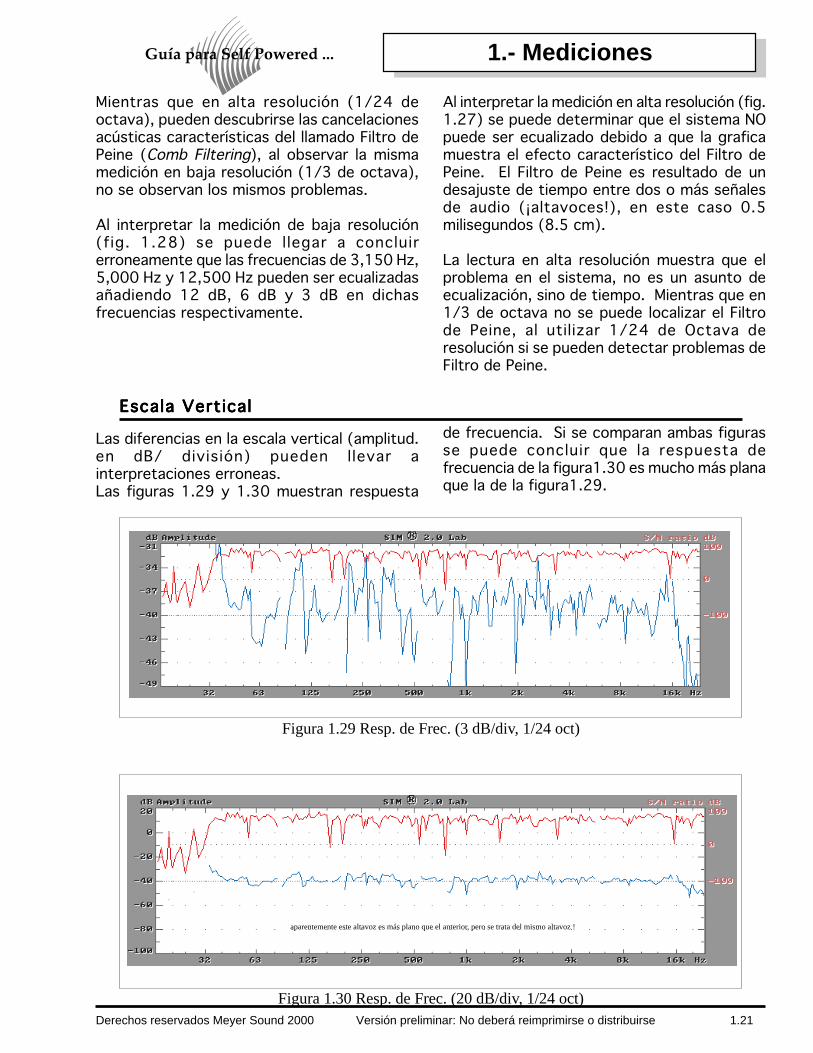
Las diferencias en la escala vertical (amplitud.en dB/ división) pueden llevar ainterpretaciones erroneas.Las figuras 1.29 y 1.30 muestran respuesta
Escala VerticalEscala VerticalEscala VerticalEscala VerticalEscala Verticalde frecuencia. Si se comparan ambas figurasse puede concluir que la respuesta defrecuencia de la figura1.30 es mucho más planaque la de la figura1.29.
Figura 1.29 Resp. de Frec. (3 dB/div, 1/24 oct)
Figura 1.30 Resp. de Frec. (20 dB/div, 1/24 oct)
aparentemente este altavoz es más plano que el anterior, pero se trata del mismo altavoz !
Guía para Self Powered ... 1.- Mediciones
1.22Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
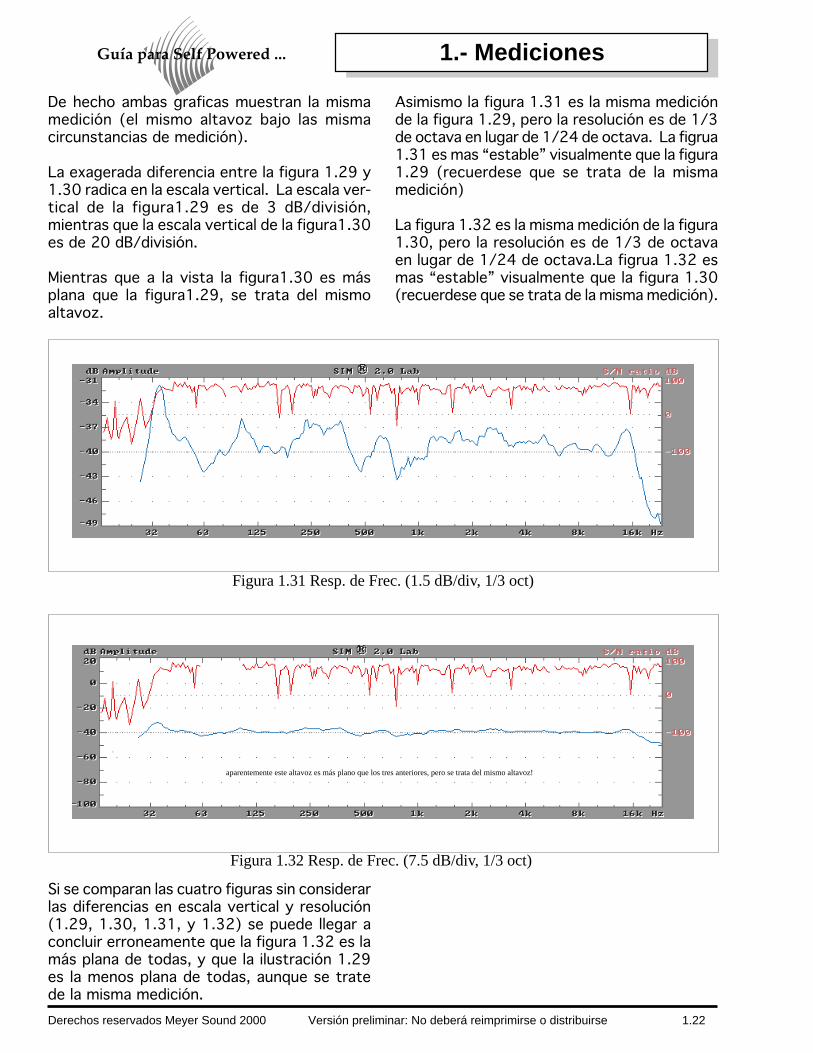
De hecho ambas graficas muestran la mismamedición (el mismo altavoz bajo las mismacircunstancias de medición).
La exagerada diferencia entre la figura 1.29 y1.30 radica en la escala vertical. La escala ver-tical de la figura1.29 es de 3 dB/división,mientras que la escala vertical de la figura1.30es de 20 dB/división.
Mientras que a la vista la figura1.30 es másplana que la figura1.29, se trata del mismoaltavoz.
Asimismo la figura 1.31 es la misma mediciónde la figura 1.29, pero la resolución es de 1/3de octava en lugar de 1/24 de octava. La figrua1.31 es mas “estable” visualmente que la figura1.29 (recuerdese que se trata de la mismamedición)
La figura 1.32 es la misma medición de la figura1.30, pero la resolución es de 1/3 de octavaen lugar de 1/24 de octava.La figrua 1.32 esmas “estable” visualmente que la figura 1.30(recuerdese que se trata de la misma medición).
Si se comparan las cuatro figuras sin considerarlas diferencias en escala vertical y resolución(1.29, 1.30, 1.31, y 1.32) se puede llegar aconcluir erroneamente que la figura 1.32 es lamás plana de todas, y que la ilustración 1.29es la menos plana de todas, aunque se tratede la misma medición.
Figura 1.31 Resp. de Frec. (1.5 dB/div, 1/3 oct)
Figura 1.32 Resp. de Frec. (7.5 dB/div, 1/3 oct)
aparentemente este altavoz es más plano que los tres anteriores, pero se trata del mismo altavoz!
Guía para Self Powered ... 1.- Mediciones
1.23Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
Los Analizadores de Tiempo Real midenamplitud contra frecuencia. Y aunque sonsensibles a problemas de fase y polaridad(dependiendo de su resolución), no puedenmedir la relación de tiempo de cada frecuencia(tiempo contra frecuencia).
A finales del siglo XVIII un talentoso matemáticofrancés (el Barón Jean Bautista Fourier)mientras trabajaba en problemas detransferencia de calor en la artillería deNapoleón, realizó una investigación sobre se-ries trigonométricas infinitas. Dichainvestigación demostró que cualquier forma deonda no importa que tan compleja sea, puedeser transformada en la suma de una serie deondas senoidales individuales, de frecuencia,amplitud, y fase individual.
Fourier desarrollo una ecuación que requierede un número grande de operacionesaritméticas y que se conoce comoTransformada de Fourier. La TransformadaRápida de Fourier (FFT por sus iniciales eninglés) es la versión rápida de la TransformadaDiscreta de Fourier (DFT).
La ecuación es:
4) Transformada Rápida de Fourier4) Transformada Rápida de Fourier4) Transformada Rápida de Fourier4) Transformada Rápida de Fourier4) Transformada Rápida de Fourier
Mientras que Fourier n on on on on o construyó unanalizador de audio, si creo las ecuacionesmatemáticas, que permitieron que en el añode 1967 una computadora realizara lasecuaciones de Fourier a muy alta velocidad.Desde entonces, y gracias a los avancestecnológicos, se puede utilizar la velocidad deprocesamiento de las computadores pararealizar un gran número de operacionesaritméticas por segundo.
La Transformada de Fourier convierte amplitudvs tiempo en amplitud vs frecuencia.
A(k) = 1N Σa(n)e
N-1
n=0
-j2πkn
N
La aplicación de la FFT en audio es que permiterealizar mediones de amplitud contra frecuenciay de amplitud vs tiempo. El poder medir tiempoy frecuencia nos permitirá descubrir problemasde fase.
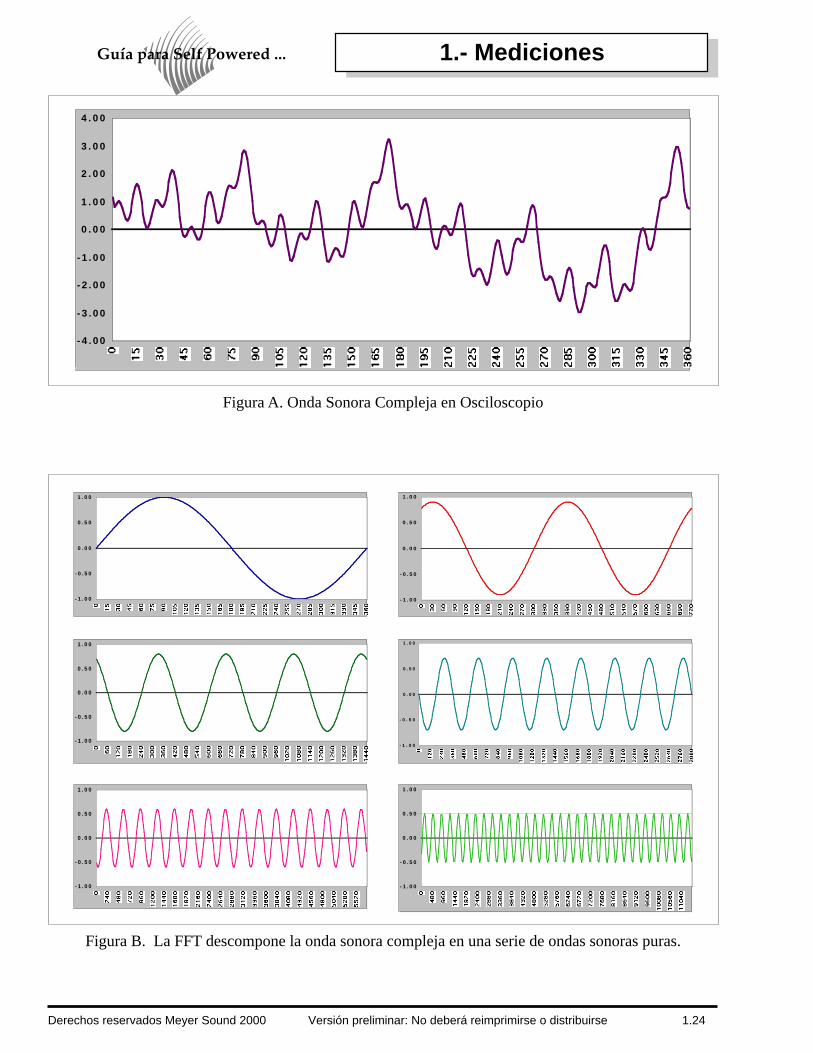
Las ilustraciones (A, B y C) ayudan acomprender que hace la Transformada Rapidade Fourier:
En la ilustración A, se muestra una onda sonoracompleja como se visualizaría en unosciloscopio.
La Trasformada Rapida de Fourier logradescomponer dicha onda sonora en una seriede ondas sonoras “puras”, indicando su nivel ysu relación de fase.
La ilustración B muestra como se visualizaríanen osciloscopio las ondas sonoras puras de lasque esta formada la onda sonora compleja dela ilustración A.
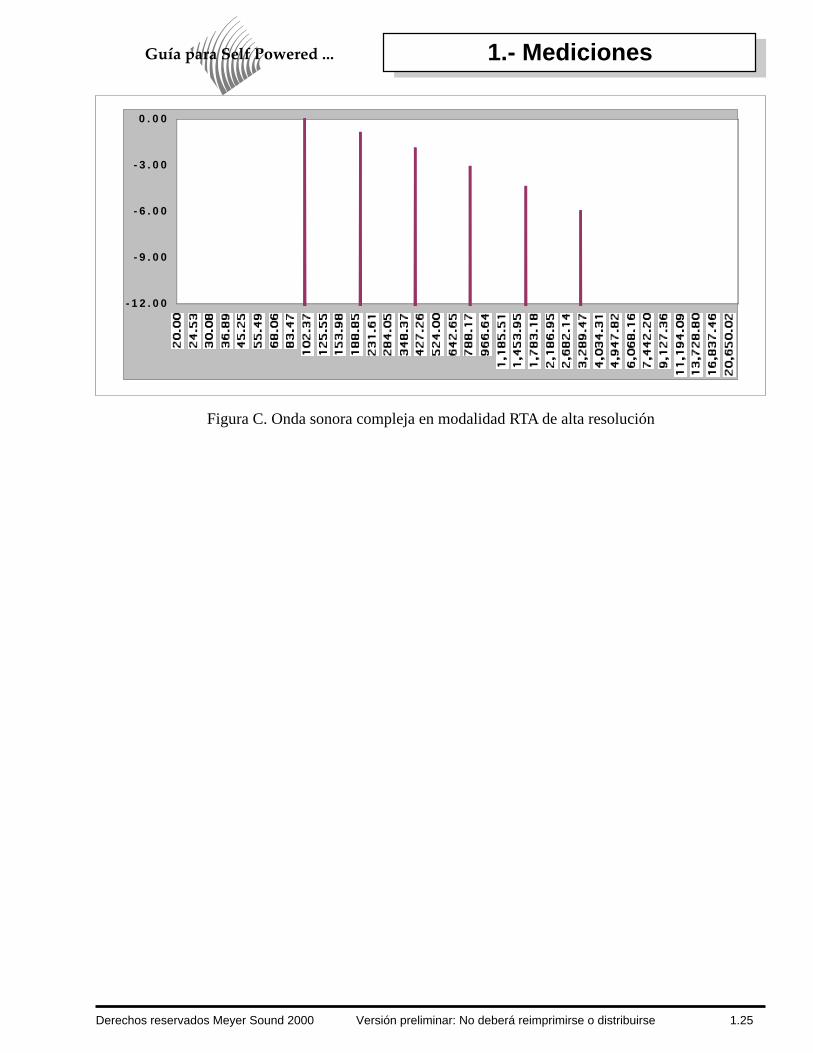
Finalmente, y a partir de la información obtenidaen la ilustración B, la ilustración C muestra comose visualizaría en un Analizador de Tiempo Real(RTA) FFT de alta resolución, la onda sonoracompleja de la ilustración A.
Entre los pioneros de los analizadores FFT, seencuentran: Bruel & Kjaer y Hewlett-Packard.En la actualidad existen muchas opciones más.
Los analizadores FFT utilizan como señal deprueba un barrido de frecuencia de ondasenoidal.
Guía para Self Powered ... 1.- Mediciones
1.24Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 1 . 0 0
- 0 . 5 0
0 . 0 0
0 . 5 0
1 . 0 0
- 4 . 0 0
- 3 . 0 0
- 2 . 0 0
- 1 . 0 0
0 . 0 0
1 . 0 0
2 . 0 0
3 . 0 0
4 . 0 0
Figura A. Onda Sonora Compleja en Osciloscopio
Figura B. La FFT descompone la onda sonora compleja en una serie de ondas sonoras puras.
Guía para Self Powered ... 1.- Mediciones
1.25Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
- 1 2 . 0 0
- 9 . 0 0
- 6 . 0 0
- 3 . 0 0
0 . 0 0
Figura C. Onda sonora compleja en modalidad RTA de alta resolución
Guía para Self Powered ... 1.- Mediciones
1.26Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
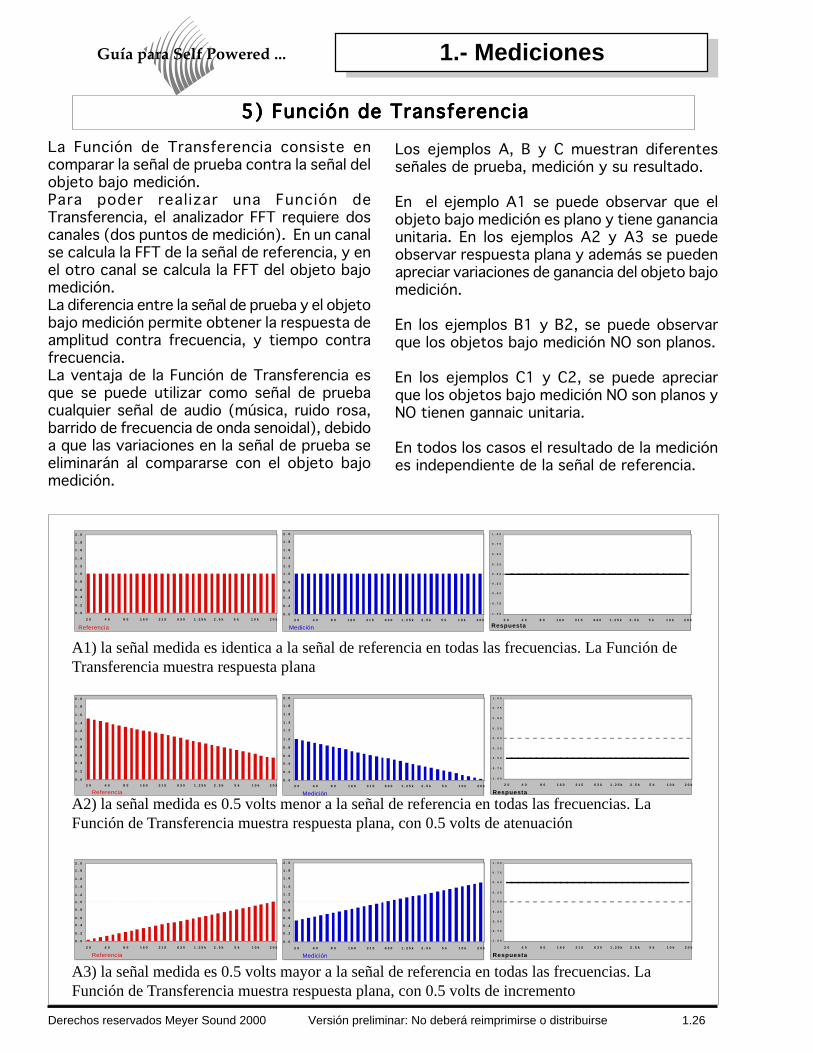
La Función de Transferencia consiste encomparar la señal de prueba contra la señal delobjeto bajo medición.Para poder realizar una Función deTransferencia, el analizador FFT requiere doscanales (dos puntos de medición). En un canalse calcula la FFT de la señal de referencia, y enel otro canal se calcula la FFT del objeto bajomedición.La diferencia entre la señal de prueba y el objetobajo medición permite obtener la respuesta deamplitud contra frecuencia, y tiempo contrafrecuencia.La ventaja de la Función de Transferencia esque se puede utilizar como señal de pruebacualquier señal de audio (música, ruido rosa,barrido de frecuencia de onda senoidal), debidoa que las variaciones en la señal de prueba seeliminarán al compararse con el objeto bajomedición.
5) Función de Transferencia5) Función de Transferencia5) Función de Transferencia5) Función de Transferencia5) Función de Transferencia
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Referencia
- 1 . 0 0
- 0 . 7 5
- 0 . 5 0
- 0 . 2 5
0 . 0 0
0 . 2 5
0 . 5 0
0 . 7 5
1 . 0 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Respuesta
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Medición
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Referencia
- 1 . 0 0
- 0 . 7 5
- 0 . 5 0
- 0 . 2 5
0 . 0 0
0 . 2 5
0 . 5 0
0 . 7 5
1 . 0 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Respuesta
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Medición
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Referencia
- 1 . 0 0
- 0 . 7 5
- 0 . 5 0
- 0 . 2 5
0 . 0 0
0 . 2 5
0 . 5 0
0 . 7 5
1 . 0 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Respuesta
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Medición
A1) la señal medida es identica a la señal de referencia en todas las frecuencias. La Función deTransferencia muestra respuesta plana
A2) la señal medida es 0.5 volts menor a la señal de referencia en todas las frecuencias. LaFunción de Transferencia muestra respuesta plana, con 0.5 volts de atenuación
A3) la señal medida es 0.5 volts mayor a la señal de referencia en todas las frecuencias. LaFunción de Transferencia muestra respuesta plana, con 0.5 volts de incremento
Los ejemplos A, B y C muestran diferentesseñales de prueba, medición y su resultado.
En el ejemplo A1 se puede observar que elobjeto bajo medición es plano y tiene gananciaunitaria. En los ejemplos A2 y A3 se puedeobservar respuesta plana y además se puedenapreciar variaciones de ganancia del objeto bajomedición.
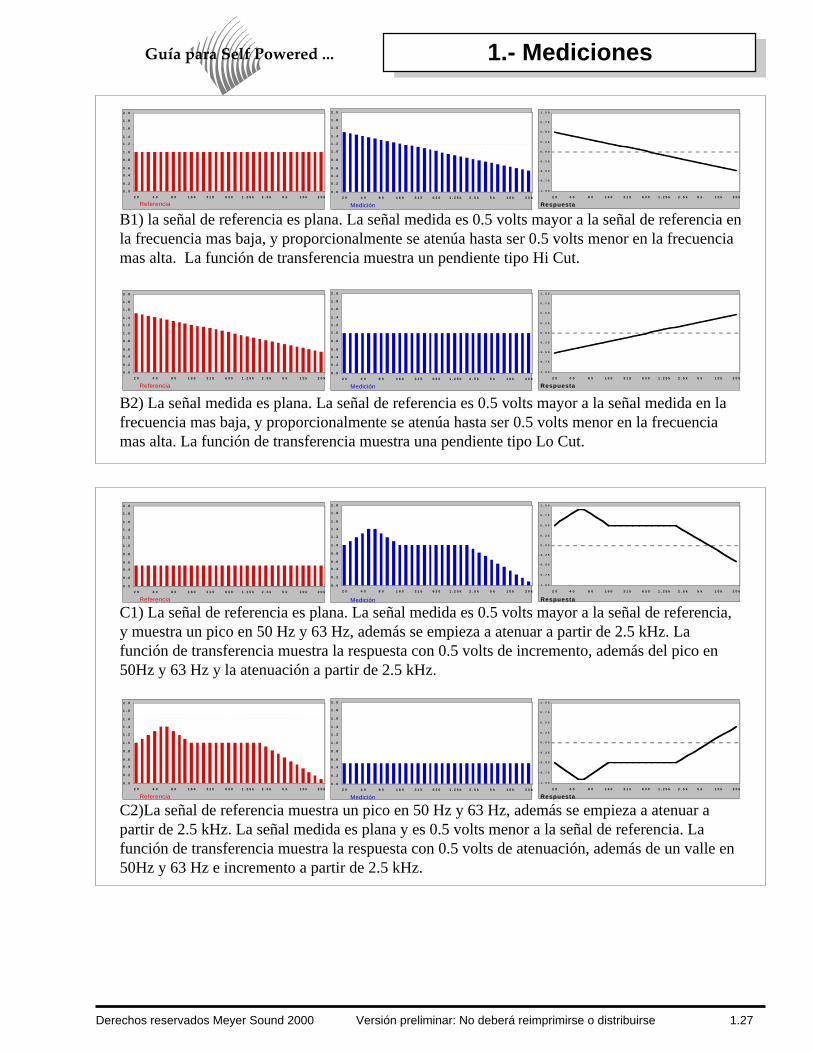
En los ejemplos B1 y B2, se puede observarque los objetos bajo medición NO son planos.
En los ejemplos C1 y C2, se puede apreciarque los objetos bajo medición NO son planos yNO tienen gannaic unitaria.
En todos los casos el resultado de la mediciónes independiente de la señal de referencia.
Guía para Self Powered ... 1.- Mediciones
1.27Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Referencia
- 1 . 0 0
- 0 . 7 5
- 0 . 5 0
- 0 . 2 5
0 . 0 0
0 . 2 5
0 . 5 0
0 . 7 5
1 . 0 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Respuesta
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Medición
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Referencia
- 1 . 0 0
- 0 . 7 5
- 0 . 5 0
- 0 . 2 5
0 . 0 0
0 . 2 5
0 . 5 0
0 . 7 5
1 . 0 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Respuesta
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Medición
B1) la señal de referencia es plana. La señal medida es 0.5 volts mayor a la señal de referencia enla frecuencia mas baja, y proporcionalmente se atenúa hasta ser 0.5 volts menor en la frecuenciamas alta. La función de transferencia muestra un pendiente tipo Hi Cut.
B2) La señal medida es plana. La señal de referencia es 0.5 volts mayor a la señal medida en lafrecuencia mas baja, y proporcionalmente se atenúa hasta ser 0.5 volts menor en la frecuenciamas alta. La función de transferencia muestra una pendiente tipo Lo Cut.
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Referencia
- 1 . 0 0
- 0 . 7 5
- 0 . 5 0
- 0 . 2 5
0 . 0 0
0 . 2 5
0 . 5 0
0 . 7 5
1 . 0 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Respuesta
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Medición
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Referencia
- 1 . 0 0
- 0 . 7 5
- 0 . 5 0
- 0 . 2 5
0 . 0 0
0 . 2 5
0 . 5 0
0 . 7 5
1 . 0 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Respuesta
0 . 0
0 . 2
0 . 4
0 . 6
0 . 8
1 . 0
1 . 2
1 . 4
1 . 6
1 . 8
2 . 0
2 0 4 0 8 0 1 6 0 3 1 5 6 3 0 1 . 2 5 k 2 . 5 k 5 k 1 0 k 2 0 k
Medición
C1) La señal de referencia es plana. La señal medida es 0.5 volts mayor a la señal de referencia,y muestra un pico en 50 Hz y 63 Hz, además se empieza a atenuar a partir de 2.5 kHz. Lafunción de transferencia muestra la respuesta con 0.5 volts de incremento, además del pico en50Hz y 63 Hz y la atenuación a partir de 2.5 kHz.
C2)La señal de referencia muestra un pico en 50 Hz y 63 Hz, además se empieza a atenuar apartir de 2.5 kHz. La señal medida es plana y es 0.5 volts menor a la señal de referencia. Lafunción de transferencia muestra la respuesta con 0.5 volts de atenuación, además de un valle en50Hz y 63 Hz e incremento a partir de 2.5 kHz.
Guía para Self Powered ... 1.- Mediciones
1.28Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
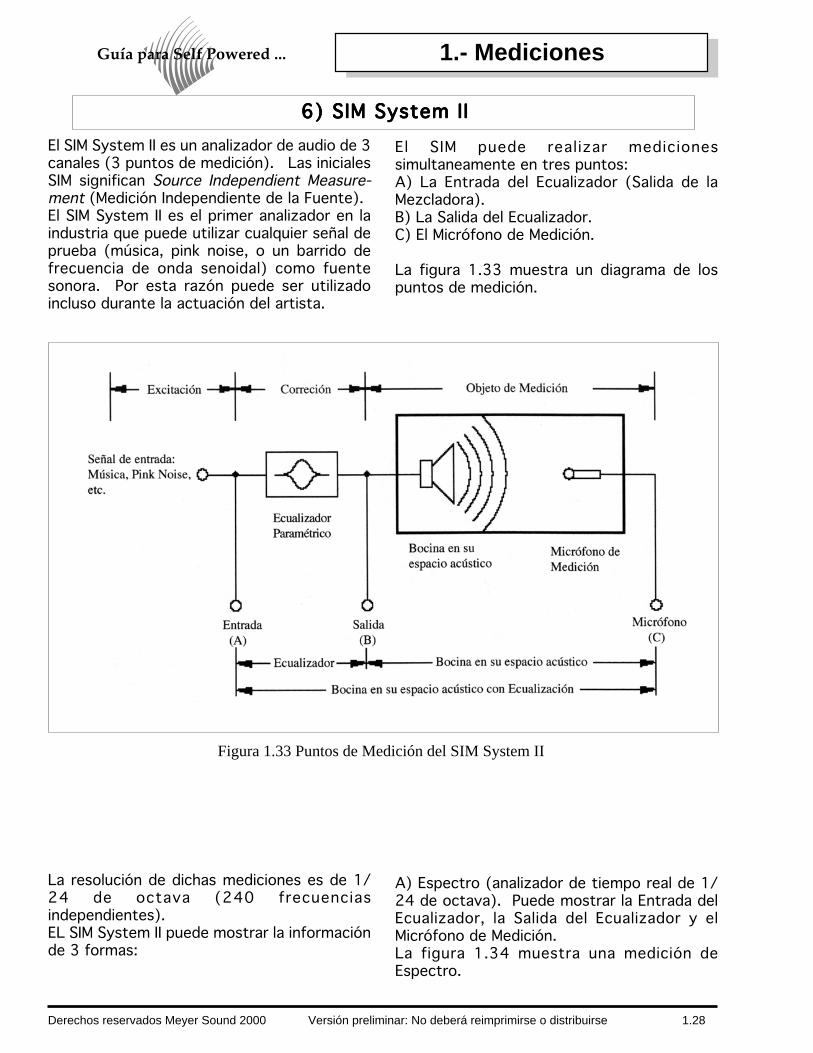
El SIM System II es un analizador de audio de 3canales (3 puntos de medición). Las inicialesSIM significan Source Independient Measure-ment (Medición Independiente de la Fuente).El SIM System II es el primer analizador en laindustria que puede utilizar cualquier señal deprueba (música, pink noise, o un barrido defrecuencia de onda senoidal) como fuentesonora. Por esta razón puede ser utilizadoincluso durante la actuación del artista.
6) SIM System II6) SIM System II6) SIM System II6) SIM System II6) SIM System II
El SIM puede realizar medicionessimultaneamente en tres puntos:A) La Entrada del Ecualizador (Salida de laMezcladora).B) La Salida del Ecualizador.C) El Micrófono de Medición.
La figura 1.33 muestra un diagrama de lospuntos de medición.
La resolución de dichas mediciones es de 1/24 de octava (240 frecuenciasindependientes).EL SIM System II puede mostrar la informaciónde 3 formas:
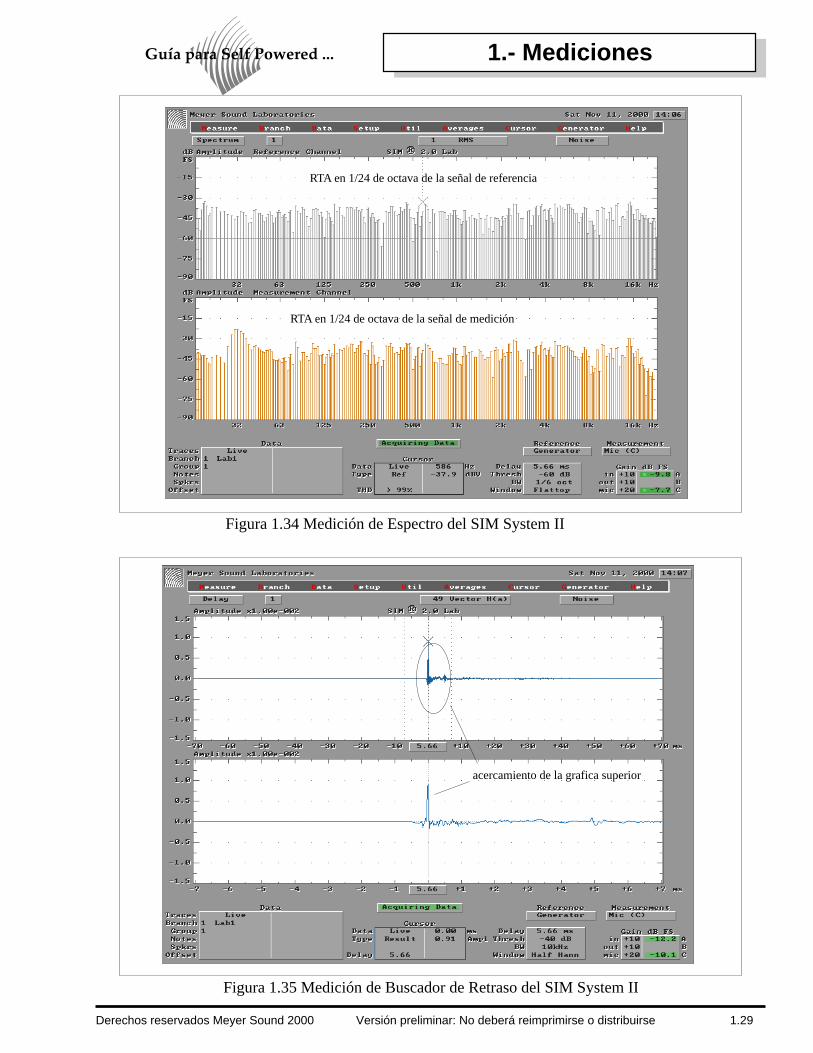
A) Espectro (analizador de tiempo real de 1/24 de octava). Puede mostrar la Entrada delEcualizador, la Salida del Ecualizador y elMicrófono de Medición.La figura 1.34 muestra una medición deEspectro.
Figura 1.33 Puntos de Medición del SIM System II
Guía para Self Powered ... 1.- Mediciones
1.29Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
Figura 1.34 Medición de Espectro del SIM System II
RTA en 1/24 de octava de la señal de referencia
RTA en 1/24 de octava de la señal de medición
Figura 1.35 Medición de Buscador de Retraso del SIM System II
acercamiento de la grafica superior
Guía para Self Powered ... 1.- Mediciones
1.30Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
B) Buscador de Retraso (respuesta de impulsocon resolución de +-0.000,02 segundos).Puede mostrar los desajustes de tiempo entrela Entrada del Ecualizador, la Salida delEcualizador y el Micrófono de Medición.Asimismo puede mostrar desajustes de tiempoentre cajas acústicas, asi como reflexiones desuperficies.La figura 1.35 muestra una medición deBuscador de Restraso.
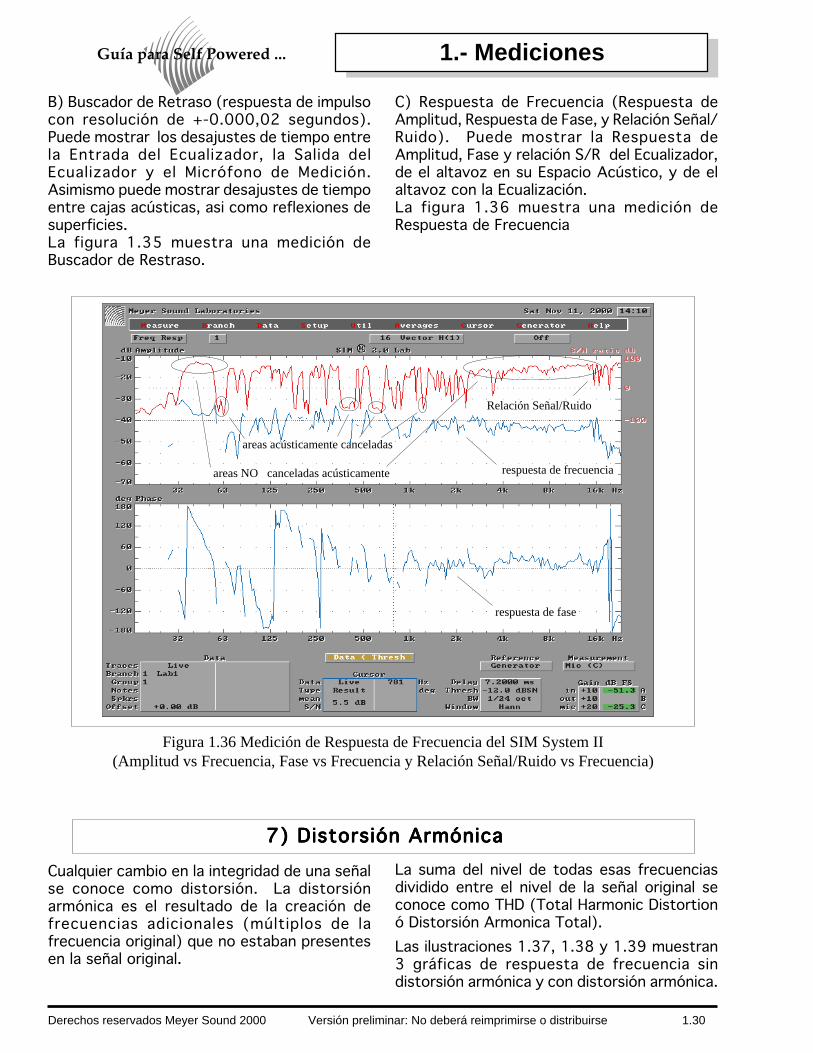
C) Respuesta de Frecuencia (Respuesta deAmplitud, Respuesta de Fase, y Relación Señal/Ruido). Puede mostrar la Respuesta deAmplitud, Fase y relación S/R del Ecualizador,de el altavoz en su Espacio Acústico, y de elaltavoz con la Ecualización.La figura 1.36 muestra una medición deRespuesta de Frecuencia
Cualquier cambio en la integridad de una señalse conoce como distorsión. La distorsiónarmónica es el resultado de la creación defrecuencias adicionales (múltiplos de lafrecuencia original) que no estaban presentesen la señal original.
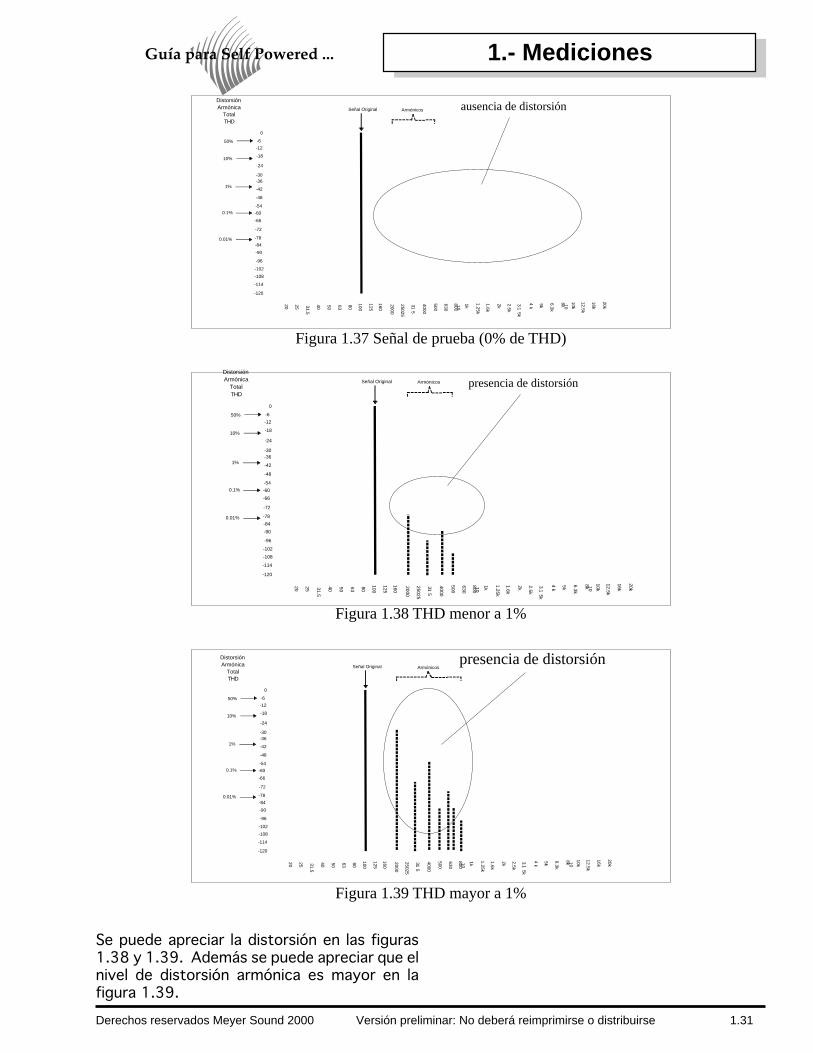
7) Distorsión Armónica7) Distorsión Armónica7) Distorsión Armónica7) Distorsión Armónica7) Distorsión ArmónicaLa suma del nivel de todas esas frecuenciasdividido entre el nivel de la señal original seconoce como THD (Total Harmonic Distortionó Distorsión Armonica Total).Las ilustraciones 1.37, 1.38 y 1.39 muestran3 gráficas de respuesta de frecuencia sindistorsión armónica y con distorsión armónica.
Figura 1.36 Medición de Respuesta de Frecuencia del SIM System II(Amplitud vs Frecuencia, Fase vs Frecuencia y Relación Señal/Ruido vs Frecuencia)
respuesta de fase
respuesta de frecuencia
Relación Señal/Ruido
areas NO canceladas acústicamente
areas acústicamente canceladas
Guía para Self Powered ... 1.- Mediciones
1.31Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
Se puede apreciar la distorsión en las figuras1.38 y 1.39. Además se puede apreciar que elnivel de distorsión armónica es mayor en lafigura 1.39.
-66
-60
-54
-48
-42
-36-30
-24
-18
-12
-6
0
-120
-114
-108
-102
-96
-90
-84
-78
-72
20 25 31.5
40 50 63
80
100
125
160
2000
25025
315
4000
500
630
80010
1.25k
1.6k
1k 2k 2.5k
3.15k
4k
5k
6.3k
8k 10
12.5k
16k
10k
20k
50%
10%
1%
0.1%
0.01%
DistorsiónArmónica
TotalTHD
Señal Original Armónicos
Figura 1.37 Señal de prueba (0% de THD)
ausencia de distorsión
-66
-60
-54
-48
-42
-36-30
-24
-18
-12
-6
0
-120
-114
-108
-102
-96
-90
-84
-78
-72
20 25 31.5
40 50 63
80
100
125
160
2000
25025
315
4000
500
630
80010
1.25k
1.6k
1k 2k 2.5k
3.15k
4k
5k
6.3k
8k 10
12.5k
16k
10k
20k
50%
10%
1%
0.1%
0.01%
DistorsiónArmónica
TotalTHD
Señal Original Armónicos
Figura 1.38 THD menor a 1%
presencia de distorsión
-66
-60
-54
-48
-42
-36-30
-24
-18
-12
-6
0
-120
-114
-108
-102
-96
-90
-84
-78
-72
20 25 31.5
40 50 63
80
100
125
160
2000
25025
315
4000
500
630
80010
1.25k
1.6k
1k 2k 2.5k
3.15k
4k
5k
6.3k
8k 10
12.5k
16k
10k
20k
50%
10%
1%
0.1%
0.01%
DistorsiónArmónica
TotalTHD
Señal Original Armónicos
Figura 1.39 THD mayor a 1%
presencia de distorsión
Guía para Self Powered ... 1.- Mediciones
1.32Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
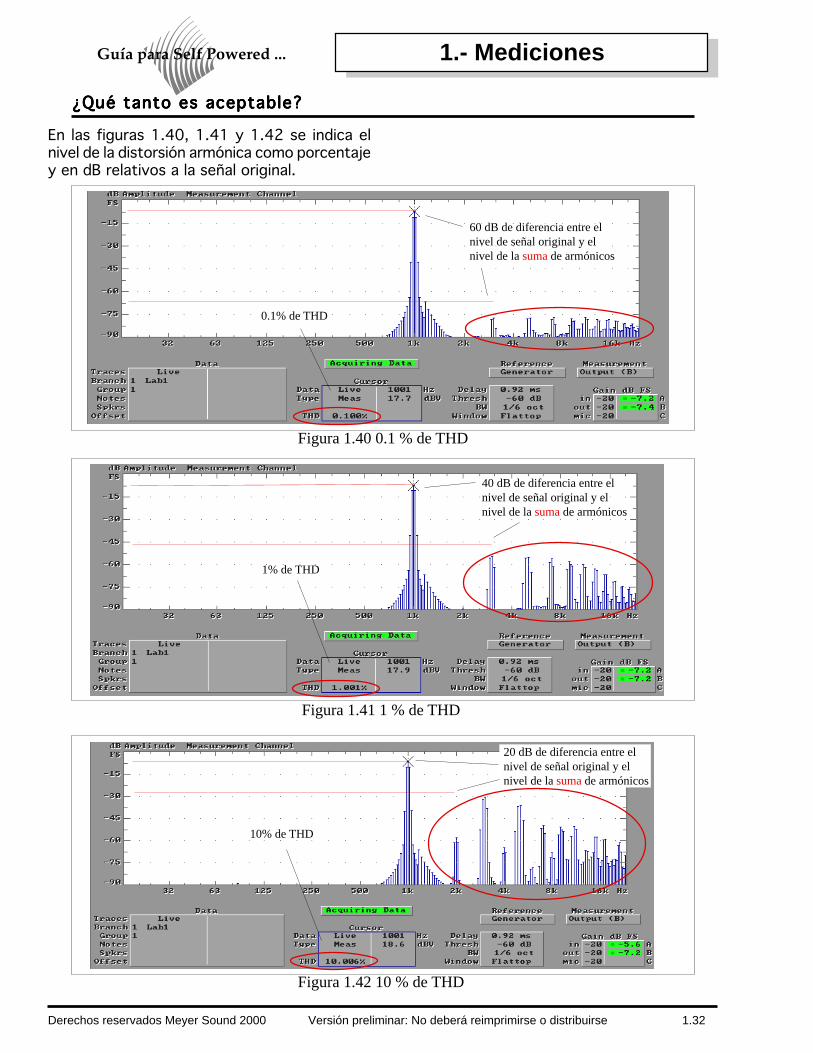
En las figuras 1.40, 1.41 y 1.42 se indica elnivel de la distorsión armónica como porcentajey en dB relativos a la señal original.
¿Qué tanto es aceptable?¿Qué tanto es aceptable?¿Qué tanto es aceptable?¿Qué tanto es aceptable?¿Qué tanto es aceptable?
Figura 1.40 0.1 % de THD
Figura 1.41 1 % de THD
Figura 1.42 10 % de THD
60 dB de diferencia entre elnivel de señal original y elnivel de la suma de armónicos
0.1% de THD
40 dB de diferencia entre elnivel de señal original y elnivel de la suma de armónicos
1% de THD
20 dB de diferencia entre elnivel de señal original y elnivel de la suma de armónicos
10% de THD
Guía para Self Powered ... 1.- Mediciones
1.33Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
En la figura 1.40 se puede apreciar que unadiferencia de 60 dB entre la señal original y elnivel de todos los armónicos sumados equivalea 0.1% de Distorsión Armónica Total.Asimismo, la figura 1.41 muestra que unadiferencia de 40 dB entre la señal original y elnivel de todos los armónicos sumados equivalea 1% de Distorsión Armónica Total.Y por último, la figura 1.42 muestra que unadiferencia de 20 dB entre la señal original y elnivel de todos los armónicos sumados equivalea 10% de Distorsión Armónica Total.
¿Que tan audibles son los diferentesporcentajes de Distorsión Armónica Total?Depende de dos factores:-El nivel de los armónicos en relación a la señaloriginal (THD).-La frecuencia de la señal original.En otras palabras, es más dificil percibirdistorsión armónica en bajas frecuencias, queen frecuencias medias o medias altas. Engeneral 1% ó más de THD es percibido por lamayoría de la gente.
8) Mediciones en el eje y fuera del eje8) Mediciones en el eje y fuera del eje8) Mediciones en el eje y fuera del eje8) Mediciones en el eje y fuera del eje8) Mediciones en el eje y fuera del eje
La manera de realizar las mediciones (lascondiciones de la medición) nos puede conducirhacia resultados erroneos.
La distancia de el altavoz con las superficiesmodificará el resultado de la medición.
De igual forma la posición del microfono demedición con respecto a la caja acústicatambien cambiará el resultado de la medición.
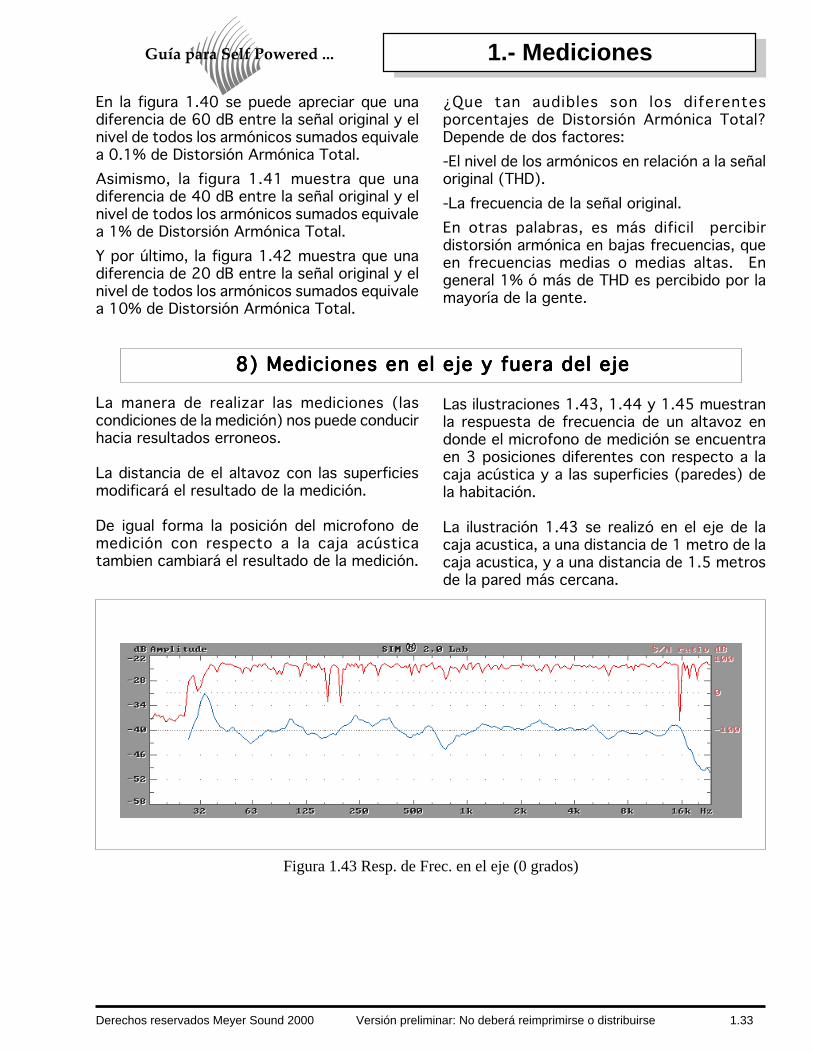
Las ilustraciones 1.43, 1.44 y 1.45 muestranla respuesta de frecuencia de un altavoz endonde el microfono de medición se encuentraen 3 posiciones diferentes con respecto a lacaja acústica y a las superficies (paredes) dela habitación.
La ilustración 1.43 se realizó en el eje de lacaja acustica, a una distancia de 1 metro de lacaja acustica, y a una distancia de 1.5 metrosde la pared más cercana.
Figura 1.43 Resp. de Frec. en el eje (0 grados)
Guía para Self Powered ... 1.- Mediciones
1.34Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
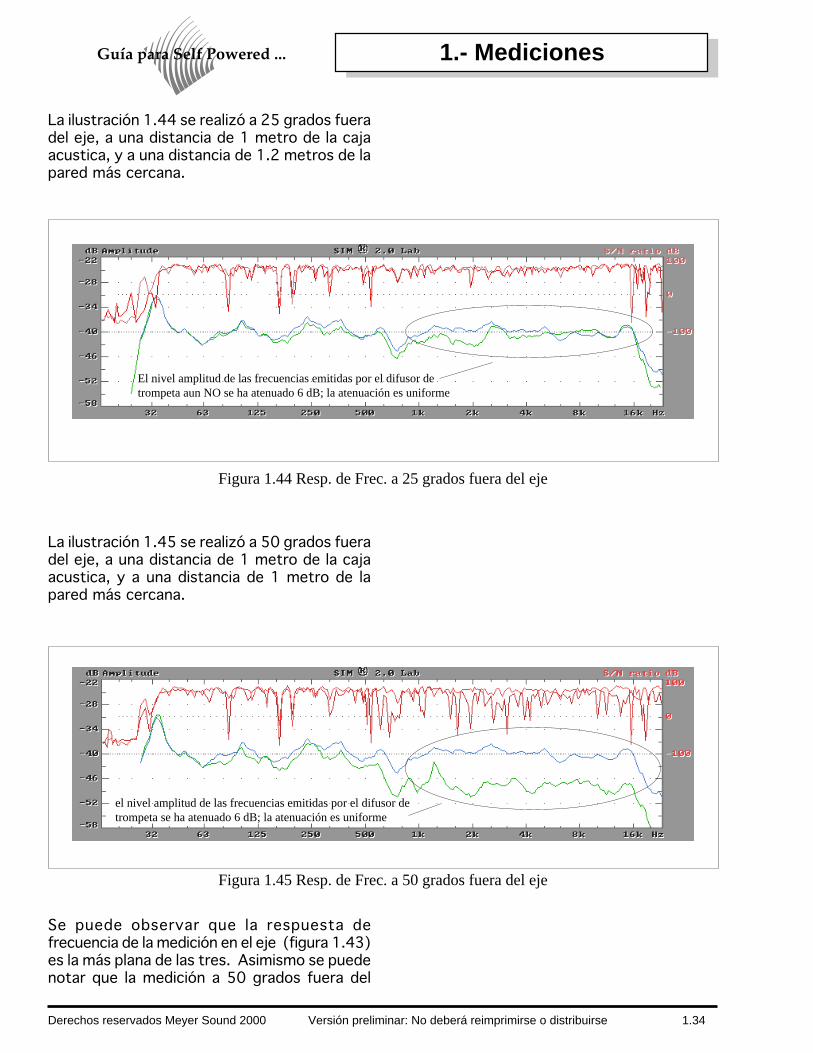
Figura 1.44 Resp. de Frec. a 25 grados fuera del eje
Figura 1.45 Resp. de Frec. a 50 grados fuera del eje
el nivel amplitud de las frecuencias emitidas por el difusor detrompeta se ha atenuado 6 dB; la atenuación es uniforme
El nivel amplitud de las frecuencias emitidas por el difusor detrompeta aun NO se ha atenuado 6 dB; la atenuación es uniforme
La ilustración 1.44 se realizó a 25 grados fueradel eje, a una distancia de 1 metro de la cajaacustica, y a una distancia de 1.2 metros de lapared más cercana.
La ilustración 1.45 se realizó a 50 grados fueradel eje, a una distancia de 1 metro de la cajaacustica, y a una distancia de 1 metro de lapared más cercana.
Se puede observar que la respuesta defrecuencia de la medición en el eje (figura 1.43)es la más plana de las tres. Asimismo se puedenotar que la medición a 50 grados fuera del
Guía para Self Powered ... 1.- Mediciones
1.35Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
eje (figura 1.45) es la que posee menor energíade frecuencias altas.También se puede observar que la medición enel eje (figura 1.43) presenta menos nivel dereflexiones de paredes. Mientras que lamedición a 22.5 grados fuera del eje (figura1.45) es la que posee mayor nivel de reflexionesde paredes.Como regla general al hacer mediciones serecomienda realizarlas en el eje de la cajaacustica, y alejado de las paredes en la medidade lo posible. La distancia del micrófono demedición con respecto a la caja acustica deberáser representativa de la audiencia (un puntointermedio entre el publico más cercano y másalejado de la caja acustica).
Como se vio anteriormente “polaridad” serefiere a la dirección del impulso inicial de laseñal de audio, y “fase” se refiere a tiempo.
Comunmente se sobrevalora el alcance de losdetectores de polaridad (erróneamentellamados “Checadores de Fase”).
Las ilustraciones 1.46A y B, 1.47A y B y 1.48Ay B muestran la respuesta de impulso y larespuesta de frecuencia y fase de un sistemade 3 vías (graves, medios y agudos). La cajaacústica de medios y agudos y la caja acústicade graves es la misma en los tres casos (MeyerUPA-1P y USW-1P), asi como los amplificadoresutilizados en los últimos dos casos (Crown serieMA).
En el primer caso se utilizó el procesamientointerno (de Meyer Sound) tanto para losagudos, medios, y graves; en el segundo y ter-cer caso se utilizo un “crossover electrónico”de proceso avanzado que incluye además delas funciones de crossover: delay por vía,ecualizador paramétrico por vía, y limitador porvía (Broke Siren Systems FCS-366 OmnidriveCompact). Para lograrlo (segundo y tercercaso), se desmonto el modulo de amplificación
9) Limitaciones de los detectores de polaridad9) Limitaciones de los detectores de polaridad9) Limitaciones de los detectores de polaridad9) Limitaciones de los detectores de polaridad9) Limitaciones de los detectores de polaridad
y procesamiento electrónico integrado tantoen la UPA-1P y USW-1P.
Mientras que en el caso primer caso, sedesconocen los puntos de corte y laspendientes utilizadas por los filtros del cross-over; en el segundo caso, las pendientesutilizadas son de 12 dB/octava y los puntosde corte son 80 Hz y 1.25 kHz; y en el tercercaso, las pendientes utilizadas son de 24 dB/octava y los puntos de corte son 125Hz y 800Hz.
Al utilizar un detector de polaridad en cada viaen los 3 sistemas se obtuvieron los siguientesresultados:
-Sistema A:Low = Verde (polaridad no invertida)Mid = Verde (polaridad no invertida)Hi = Verde (polaridad no invertida)
-Sistema B:Low = Verde (polaridad no invertida)Mid = Rojo (polaridad invertida)Hi = Verde (polaridad no invertida)
Guía para Self Powered ... 1.- Mediciones
1.36Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
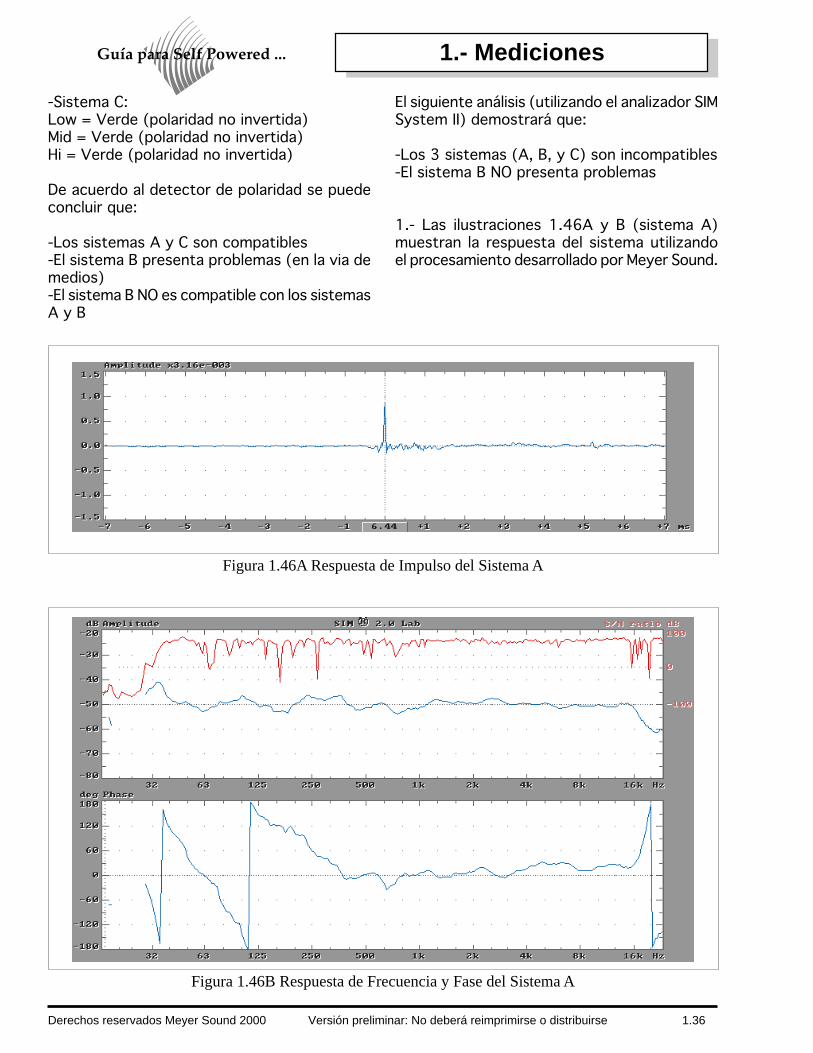
Figura 1.46A Respuesta de Impulso del Sistema A
-Sistema C:Low = Verde (polaridad no invertida)Mid = Verde (polaridad no invertida)Hi = Verde (polaridad no invertida)
De acuerdo al detector de polaridad se puedeconcluir que:
-Los sistemas A y C son compatibles-El sistema B presenta problemas (en la via demedios)-El sistema B NO es compatible con los sistemasA y B
El siguiente análisis (utilizando el analizador SIMSystem II) demostrará que:
-Los 3 sistemas (A, B, y C) son incompatibles-El sistema B NO presenta problemas
1.- Las ilustraciones 1.46A y B (sistema A)muestran la respuesta del sistema utilizandoel procesamiento desarrollado por Meyer Sound.
Figura 1.46B Respuesta de Frecuencia y Fase del Sistema A
Guía para Self Powered ... 1.- Mediciones
1.37Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
La respuesta de impulso muestra un impulsoNO invertido, en una sola dirección (similar alcomportamiento de un cable o un componenteelectrónico).
Se puede apreciar que desde los 300 Hz hastalos 16 kHz, la fase se encuentra en el area de0 grados (lo que significa que en todo ese rangolas frecuencias se reproducen al mismo tiempo).Asimismo se puede apreciar retrasoproporcional a la frecuencia (al disminuir lafrecuencia el retraso es mayor) a partir de 300Hz.
Como se indicó anteriormente, un detector depolaridad indica en las tres vías color verde (loque significa que ninguna de las vías tienepolaridad invertida).
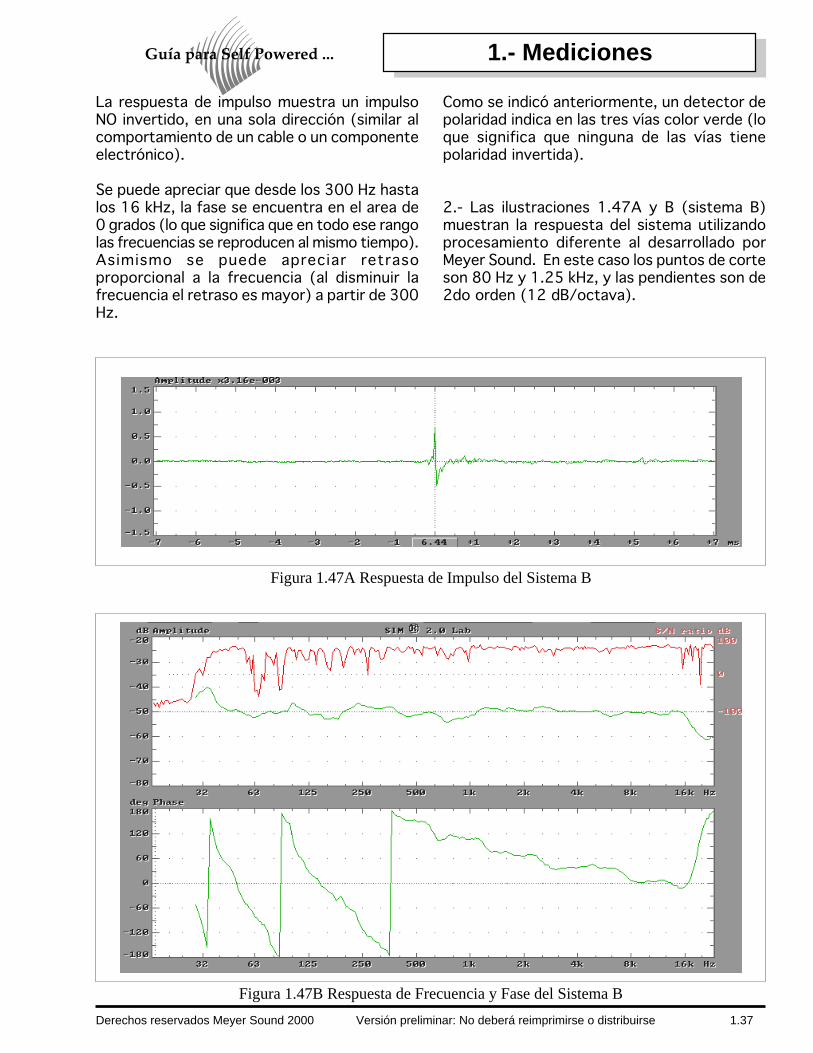
2.- Las ilustraciones 1.47A y B (sistema B)muestran la respuesta del sistema utilizandoprocesamiento diferente al desarrollado porMeyer Sound. En este caso los puntos de corteson 80 Hz y 1.25 kHz, y las pendientes son de2do orden (12 dB/octava).
Figura 1.47A Respuesta de Impulso del Sistema B
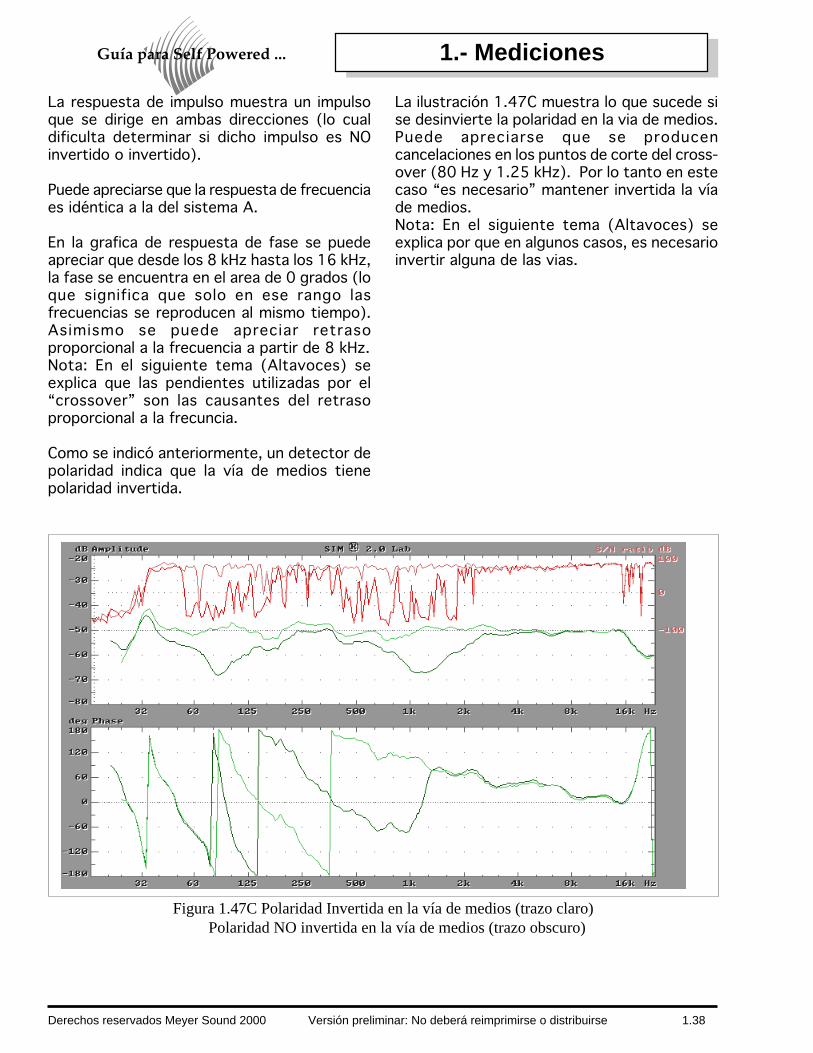
Figura 1.47B Respuesta de Frecuencia y Fase del Sistema B
Guía para Self Powered ... 1.- Mediciones
1.38Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
Figura 1.47C Polaridad Invertida en la vía de medios (trazo claro) Polaridad NO invertida en la vía de medios (trazo obscuro)
La respuesta de impulso muestra un impulsoque se dirige en ambas direcciones (lo cualdificulta determinar si dicho impulso es NOinvertido o invertido).
Puede apreciarse que la respuesta de frecuenciaes idéntica a la del sistema A.
En la grafica de respuesta de fase se puedeapreciar que desde los 8 kHz hasta los 16 kHz,la fase se encuentra en el area de 0 grados (loque significa que solo en ese rango lasfrecuencias se reproducen al mismo tiempo).Asimismo se puede apreciar retrasoproporcional a la frecuencia a partir de 8 kHz.Nota: En el siguiente tema (Altavoces) seexplica que las pendientes utilizadas por el“crossover” son las causantes del retrasoproporcional a la frecuncia.
Como se indicó anteriormente, un detector depolaridad indica que la vía de medios tienepolaridad invertida.
La ilustración 1.47C muestra lo que sucede sise desinvierte la polaridad en la via de medios.Puede apreciarse que se producencancelaciones en los puntos de corte del cross-over (80 Hz y 1.25 kHz). Por lo tanto en estecaso “es necesario” mantener invertida la víade medios.Nota: En el siguiente tema (Altavoces) seexplica por que en algunos casos, es necesarioinvertir alguna de las vias.
Guía para Self Powered ... 1.- Mediciones
1.39Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
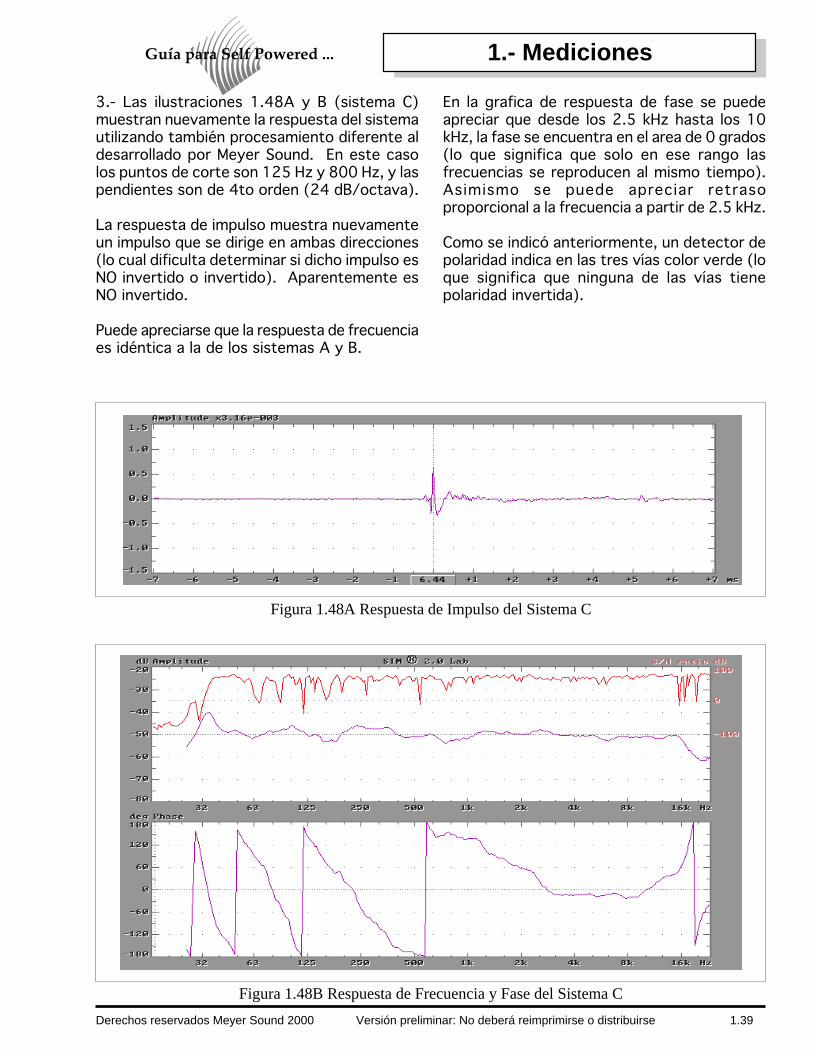
3.- Las ilustraciones 1.48A y B (sistema C)muestran nuevamente la respuesta del sistemautilizando también procesamiento diferente aldesarrollado por Meyer Sound. En este casolos puntos de corte son 125 Hz y 800 Hz, y laspendientes son de 4to orden (24 dB/octava).
La respuesta de impulso muestra nuevamenteun impulso que se dirige en ambas direcciones(lo cual dificulta determinar si dicho impulso esNO invertido o invertido). Aparentemente esNO invertido.
Puede apreciarse que la respuesta de frecuenciaes idéntica a la de los sistemas A y B.
Figura 1.48A Respuesta de Impulso del Sistema C
Figura 1.48B Respuesta de Frecuencia y Fase del Sistema C
En la grafica de respuesta de fase se puedeapreciar que desde los 2.5 kHz hasta los 10kHz, la fase se encuentra en el area de 0 grados(lo que significa que solo en ese rango lasfrecuencias se reproducen al mismo tiempo).Asimismo se puede apreciar retrasoproporcional a la frecuencia a partir de 2.5 kHz.
Como se indicó anteriormente, un detector depolaridad indica en las tres vías color verde (loque significa que ninguna de las vías tienepolaridad invertida).
Guía para Self Powered ... 1.- Mediciones
1.40Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
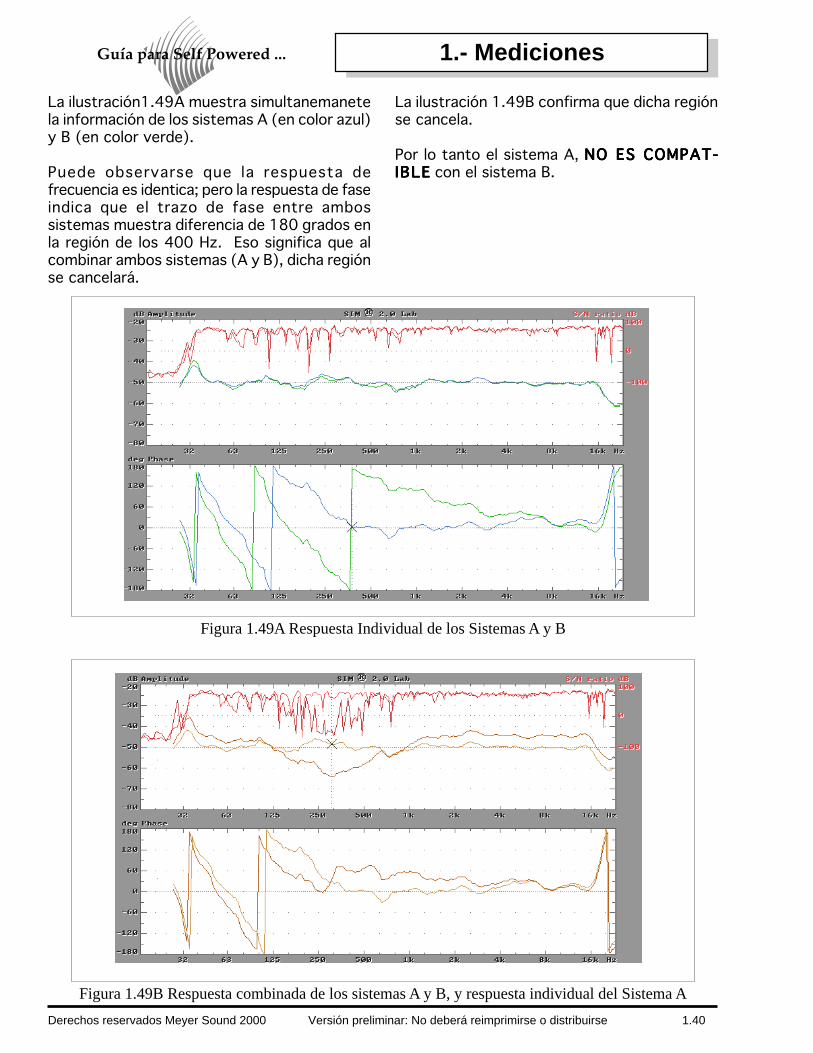
La ilustración1.49A muestra simultanemanetela información de los sistemas A (en color azul)y B (en color verde).
Puede observarse que la respuesta defrecuencia es identica; pero la respuesta de faseindica que el trazo de fase entre ambossistemas muestra diferencia de 180 grados enla región de los 400 Hz. Eso significa que alcombinar ambos sistemas (A y B), dicha regiónse cancelará.
Figura 1.49A Respuesta Individual de los Sistemas A y B
Figura 1.49B Respuesta combinada de los sistemas A y B, y respuesta individual del Sistema A
La ilustración 1.49B confirma que dicha regiónse cancela.
Por lo tanto el sistema A, NO ES COMPAT-NO ES COMPAT-NO ES COMPAT-NO ES COMPAT-NO ES COMPAT-IBLEIBLEIBLEIBLEIBLE con el sistema B.
Guía para Self Powered ... 1.- Mediciones
1.41Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
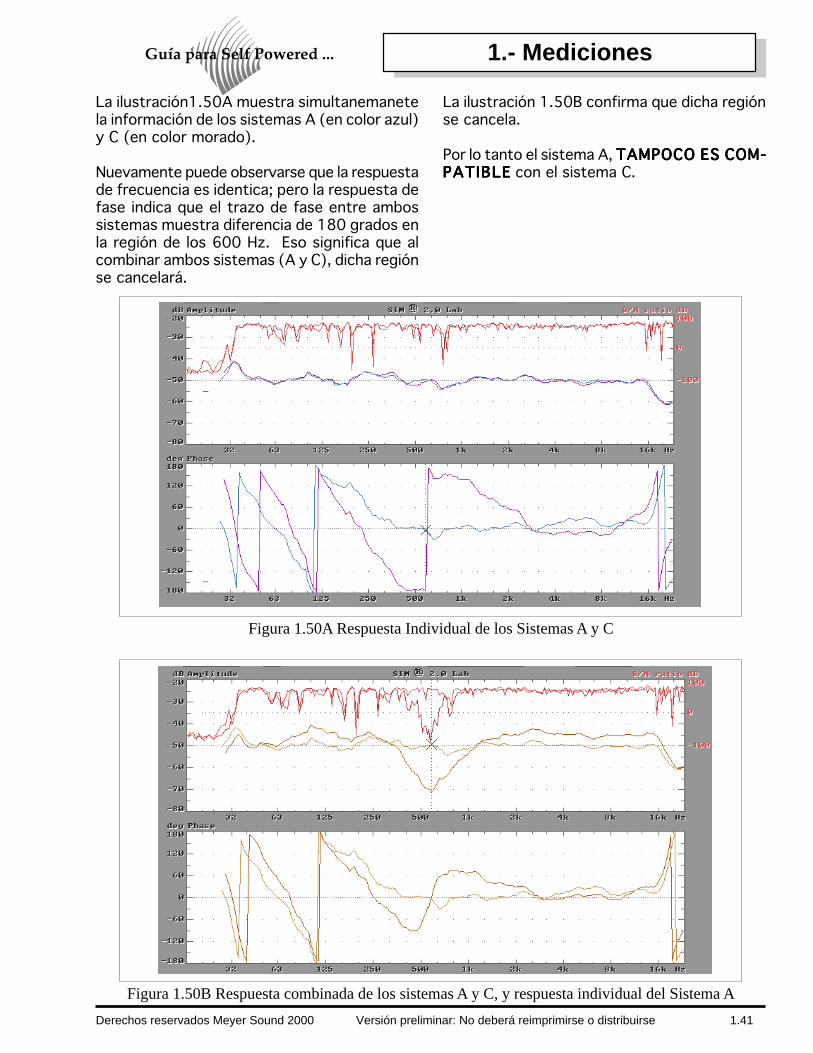
Figura 1.50A Respuesta Individual de los Sistemas A y C
Figura 1.50B Respuesta combinada de los sistemas A y C, y respuesta individual del Sistema A
La ilustración1.50A muestra simultanemanetela información de los sistemas A (en color azul)y C (en color morado).
Nuevamente puede observarse que la respuestade frecuencia es identica; pero la respuesta defase indica que el trazo de fase entre ambossistemas muestra diferencia de 180 grados enla región de los 600 Hz. Eso significa que alcombinar ambos sistemas (A y C), dicha regiónse cancelará.
La ilustración 1.50B confirma que dicha regiónse cancela.
Por lo tanto el sistema A, TAMPOCO ES COM-TAMPOCO ES COM-TAMPOCO ES COM-TAMPOCO ES COM-TAMPOCO ES COM-PATIBLEPATIBLEPATIBLEPATIBLEPATIBLE con el sistema C.
Guía para Self Powered ... 1.- Mediciones
1.42Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
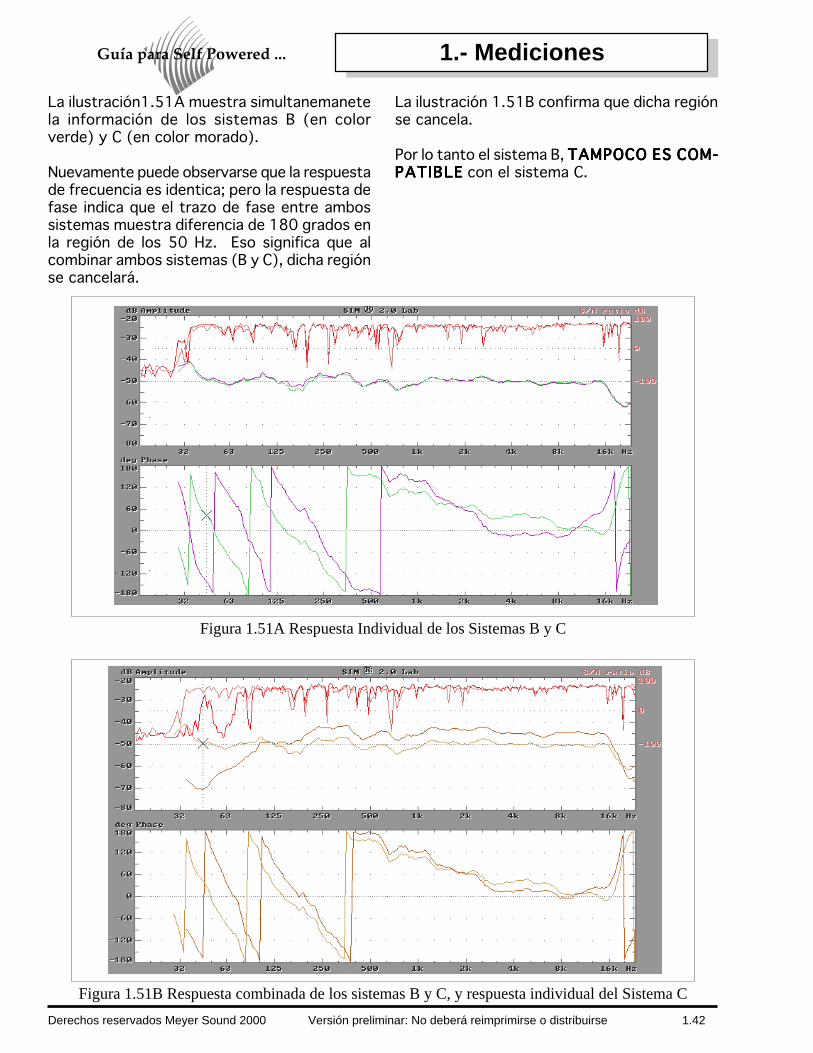
Figura 1.51A Respuesta Individual de los Sistemas B y C
Figura 1.51B Respuesta combinada de los sistemas B y C, y respuesta individual del Sistema C
La ilustración1.51A muestra simultanemanetela información de los sistemas B (en colorverde) y C (en color morado).
Nuevamente puede observarse que la respuestade frecuencia es identica; pero la respuesta defase indica que el trazo de fase entre ambossistemas muestra diferencia de 180 grados enla región de los 50 Hz. Eso significa que alcombinar ambos sistemas (B y C), dicha regiónse cancelará.
La ilustración 1.51B confirma que dicha regiónse cancela.
Por lo tanto el sistema B, TAMPOCO ES COM-TAMPOCO ES COM-TAMPOCO ES COM-TAMPOCO ES COM-TAMPOCO ES COM-PATIBLEPATIBLEPATIBLEPATIBLEPATIBLE con el sistema C.
Guía para Self Powered ... 1.- Mediciones
1.43Versión preliminar: No deberá reimprimirse o distribuirseDerechos reservados Meyer Sound 2000
Ninguno de los 3 sistemas (A, B y C) es com-patible entre sí. ¿Por qué? Porque losparámetros de procesamiento (puntos de cortey pendientes de filtraje) no son idénticos.
En el siguiente tema (Altavoces) se explicanlas consecuencias que tienen las pendientes ylos puntos de corte de los filtros utilizadas porlos “crossovers” con la respuesta de faseresultante (lo cuál también tiene repercusionesen la “polaridad”).
Combinar sistemas de sonido de diferentesmodelos y marcas puede conducir a un grannumero de anomalías debido a que la fase entodas las frecuencias NO sera compatible en-tre todos los sistemas.
Tomar decisiones basadas en la similitud decolores (entre diferentes vías) por medio deun detector de polaridad puede llevar aresultados desastrosos, debido a que dichodetector rastrea polaridad (dirección) y no fase(relación de tiempo entre diferentesfrecuencias).
Si se desean tomar decisiones de polaridad(entre diferentes vías), y de compatibilidadentre sistemas, la herramienta confiable debeser un analizador FFT de alta resolución de doscanales, que pueda calcular la Función deTransferencia entre ambos canales (tal es elcaso del analizador SIM System II de MeyerSound).





























