Embed Size (px)
Citation preview

Федеральное агентство по образованию
Нижегородский государственный архитектурно-строительный университет-------------------------------------------------------------------------------------------------
Институт открытого дистанционного образования
Б.Б. Лампси, В.П. Гущин, Н.В. Стопкин,
Н.Ю. Трянина, В.И. Пашкевич
СТРОИТЕЛЬНАЯ МЕХАНИКА
Часть II. Статически неопределимые системы
Утверждено редакционно-издательским
советом университета
в качестве учебного пособия
Нижний Новгород - 2005
1

ББК
С 23
Строительная механика. Часть II. Статически неопределимые системы:
Учебное пособие / Лампси Б.Б., Гущин В.П., Стопкин Н.В., Трянина Н.Ю.,
Пашкевич В.И. – Н.Новгород: Нижегород. гос. архит.-строит. ун-т., 2005. –
85 с.
ISBN 5-87941-
Учебное пособие содержит теоретические сведения и основные
положения расчета плоских статически неопределимых стержневых систем
методом сил, перемещений и методом конечных элементов. Многочисленные
примеры расчета сопровождаются необходимыми пояснениями к решению и
включают задания для самостоятельной работы. Учебное пособие
предназначено для студентов строительных специальностей, изучающих общий
курс строительной механики стержневых систем. Пособие включает примеры и
задания для выполнения расчетно-графической работы.
ББК
ISBN 5-87941-
коллектив авторов, 2005
ННГАСУ, 2005
2

ВВЕДЕНИЕ
Реальные сооружения представляют собой сложные инженерные системы,
расчет которых с учетом всех их особенностей выполнить достаточно сложно.
В связи с этим для практических расчетов вместо конструктивных схем
используют расчетные схемы, где принимают ряд упрощений, которые
незначительно влияют на результаты, но существенно упрощают решение. Из
всего разнообразия расчетных схем в пособии рассматриваются только плоские
статически неопределимые стержневые системы.
Статически неопределимыми называются системы, в которых не все
реакции и усилия, определяемые по недеформированному состоянию, могут
быть определены из уравнений равновесия статики. Кинематической
характеристикой статически неопределимых систем является наличие лишних
связей, количество которых определяет степень статической неопределимости.
Статически неопределимые системы обладают следующими характерными для
них свойствами:
усилия в статически неопределимых системах зависят от количества и
жесткостей лишних связей;
наличие лишних связей в статически неопределимой системе повышает
ее общую жесткость, поэтому перемещения точек такой системы всегда меньше
аналогичных перемещений точек системы, не содержащей лишних связей;
изменение температурного режима и кинематические воздействия
вызывают появление усилий в статически неопределимых системах;
усилия в статически неопределимых системах при действии нагрузки
зависят только от соотношения жесткостей сечений стержней, а при изменении
температурного режима и кинематического воздействия – от величин
жесткостей сечений стержней;
чувствительность статически неопределимой системы к изменению
температурного режима и кинематическим воздействиям существенно зависит
3

от упругого или упругопластического состояния системы. Очевидно, что при
образовании в системе такого количества пластических шарниров, при котором
она превращается в статически определимую, влияние температурных и
кинематических воздействий исчезает.
Основными методами расчета статически неопределимых систем являются
метод сил, где неизвестными являются силы и усилия; метод перемещений, где
неизвестными являются угловые и линейные перемещения узлов системы и
метод конечных элементов.
В пособии излагается расчет статически неопределимых систем этими
методами от различного вида внешних воздействий.
Студенты должны выполнить расчетно-графическую работу на тему
«Расчет плоской статически неопределимой рамы методом сил от нагрузки».
Задание для выполнения работы выбирается в соответствии с порядковым
номером в учебной ведомости.
1. ОСНОВНЫЕ ТЕОРЕМЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ
1.1. Понятие о действительной и возможной работе
Работа силы на соответствующем этой силе действительном перемещении,
вызываемом той же силой, называется действительной работой.
Рассмотрим упругую систему, находящуюся под воздействием системы
сил Р1 , Р2 , … Рn , которые вызовут ее деформации и перемещение точек 1, 2,
… n (рис.1.1). Эти перемещения представляют собой проекции истинных
перемещений соответствующих точек на линии действия нагрузок.
Будем считать, что все заданные силы прикладываются статически, т.е. их
значения нарастают от нуля до максимальных значений настолько медленно,
что они не вызывают ускорений точек системы, а значит и инерционных сил. В
условиях идеальной упругости работа этой системы сил не зависит от порядка
4

приложения нагрузок и определяется только их окончательными значениями.
Будем считать, что все нагрузки Рn изменяются пропорционально одному
параметру и соотношение между ними не меняется. Тогда действительная
работа на соответствующем перемещении может быть определена по теореме
Клайперона:
. (1.1)
Работа силы на соответствующем перемещении, но вызываемом иной
силой или другими факторами, называется возможной или виртуальной
работой.
Возможная работа определяется по формуле:
, (1.2)
где i n – перемещение точки приложения «i»-той силы, вызванное силой «n».
1.2. Теорема о взаимности возможных работ (теорема Бетти)
Рассмотрим идеально-упругую и линейно деформируемую систему.
Сначала загрузим систему силой Р1 , при этом точка приложения первой силы
получает действительное перемещение 11 и совершается действительная
работа (рис. 1.2 а). Затем загружаем систему второй силой Р2 .
Точка приложения первой силы получает перемещение 12 , вызванное второй
силой и совершается возможная работа . Точка приложения второй
силы получает перемещение 22 , вызванное второй силой, совершается
действительная работа . Изменим порядок загружения. Сначала
систему загрузим второй силой, подсчитаем работу, затем первой силой.
Полученную работу будем обозначать с индексом «(2)» (рис.1.2 б).
Действительная работа второй силы на перемещении точки приложения второй
5

силы, вызванном второй силой: . Возможная работа второй силы на
перемещении точки приложения второй силы, вызванном первой силой
. Действительная работа первой силы на перемещении точки
приложения первой силы, вызванном первой силой . Так как в
условиях идеальной упругости работа внешних сил зависит лишь от начального
и конечного положения, то изменение порядка приложения нагрузки не будет
менять работы внешних сил, поэтому можно записать:
Распространяя сделанный вывод на группу сил, получим теорему Бетти о
взаимности возможных работ:
А/i j = A/
j i ,
т.е. возможная работа первой группы сил на перемещениях, вызванных второй
группой сил, равна возможной работе второй группы сил на перемещениях,
вызванных первой группой сил.
1.3. Теорема о взаимности удельных перемещений
(теорема Максвелла)
Пусть в первой группе сил действует одна сила – Рi , во второй – одна сила
Рj , тогда согласно теореме Бетти:
А/i j = A/
j i ,
.
Используя принцип пропорциональности:
,
6

,
где - удельное перемещение точки приложения силы Рi по ее направлению
от действия силы Рj = 1;
- удельное перемещение точки приложения силы Рj по ее направлению от
действия силы Рi = 1. Тогда из теоремы Бетти
Рj Рi = Рj Рi .
После сокращений будем иметь
= .
Теорема Максвелла: удельное перемещение точки приложения силы Рi по
ее направлению от силы Рj = 1 равно удельному перемещению точки
приложения силы Рj по ее направлению от действия силы Рi = 1.
1.4. Теорема о взаимности удельных реакций (первая теорема Рэлея)
Рассмотрим упругую систему в двух состояниях. В первом случае
кинематическим воздействием является единичный угол поворота связи i
(рис.1.3 а), во втором – единичное линейное смещение связи j (рис.1.3 б).
Примем силы первого состояния за первую группу сил, а силы второго
состояния за вторую группу. Тогда, на основании теоремы Бетти:
,
.
Получили теорему о взаимности удельных реакций:
удельная реакция связи «i», вызванная единичным смещением связи «j»,
равна удельной реакций связи «j», вызванной единичным смещением связи «i».
7

1.5. Теорема о взаимности удельных реакций и удельных
перемещений (вторая теорема Рэлея)
Рассмотрим упругую систему при статическом и кинематическом
воздействиях. В первом состоянии кинематическим воздействием является
единичный угол поворота связи «i» (рис.1.4 а), во втором состоянии
статическим воздействием является единичная сила Рj = 1. По теореме Бетти
.
Получим теорему о взаимности удельных реакций и удельных
перемещений:
.
Удельная реакция связи «i», вызванная единичной силой Рj = 1, равна с
обратным знаком удельному перемещению точки приложения силы Рj ,
вызванному единичным смещением связи «i».
8

Ð è ñ . 1 . 1
a )
D 1
D 2 D i
D n
Ð è ñ . 1 . 2
á )
D 1 1 D 2 2
P 2 P 1
D 1 2 D 2 2 D 2 1
P 2 P 1
D 1 1
1 - å ç à ã ð ó æ å í è å 2 - î å ç à ã ð ó æ å í è å
i j
r j i
1 r i i
r j i r j j
r i j
á ) a )
Ð è ñ . 1 . 3
i
j
r k i
1 r i i
r k j
r i j
á ) a )
Ð è ñ . 1 . 4
d j i
K
i
P j = 1
P 1 P 2 P i P n
1
9

2. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ МЕТОДОМ СИЛ
2.1. Определение степени статической неопределимости
Степень статической неопределимости или число лишних связей Л
определяется следующими зависимостями:
-для стержневых систем
Л = С0 + 2Ш – 3Д или (2.1)
Л = С0 + 2Ш + 3Ж – 3С, (2.2)
-для шарнирно-стержневых систем
Л = С0 + С – 2У, (2.3)
где Д – число дисков, С – число стержней, С0 – число опорных стержней, У –
число шарнирных узлов, Ж – число простых жестких узлов, Ш – число простых
шарниров. Жесткий узел и шарнир называется простым, если он соединяет два
диска или два стержня. Если жесткий узел или шарнир соединяет m дисков или
стержней, то он кратен (m – 1) простым шарнирам или жестким узлам, то есть
Ш = m –1 и Ж = m – 1.
Практически число лишних связей удобно определять, рассматривая
каждый бесшарнирно-замкнутый контур К как три раза статически
неопределимый за вычетом числа недостающих связей до бесшарнирной его
замкнутости или за вычетом общего количества простых шарниров, то есть
Л = 3К – Ш. (2.4)
Вычисляем степень статической неопределимости для систем (рис. 2.1).
Для схемы а), используя (2.1), получим Д = 3, С0 = 8, Ш = 2 и Л = 8 + 22 -
33 = 3; используя (2.2) Ж = 5, С = 8 и Л = 8 + 22 + 35 - 38 = 3; используя
(2.4) К = 2, Ш = 3 и Л = 32 – 3 = 3. Для схемы б), согласно (2.1), получим Д =
3, С0 = 8, Ш = 2 и Л = 8 + 22 - 33 = 3; согласно (2.2) Ж = 3, С = 6 и Л = 8 +
22 + 33 - 36 = 3; согласно (2.4) К = 2, Ш = 3 и Л = 32 – 3 = 3. Аналогично
для схем в), г), д), е) Л = 4, Л = 4, Л = 6 и Л = 4, соответственно.
10

Ø = 1 Æ = 1
Ñ 0 = 3
Ø = 1 Æ = 2
Æ = 1
Æ = 1
Ñ 0 = 3 Ñ 0 = 2
à ) á )
Ø = 2
Æ = 1 Æ = 1
Æ = 1
Ñ 0 = 2 Ñ 0 = 3 Ñ 0 = 2
Ø = 1 Æ = 1
Ñ 0 = 1
Ø = 1 Æ = 2
Æ = 1
Æ = 1
Ñ 0 = 3 Ñ 0 = 2
â ) ã )
Ø = 2
Æ = 2 Æ = 1 Æ = 1
Ñ 0 = 2 Ñ 0 = 3 Ñ 0 = 2
Æ = 2 Æ = 2
Ø = 1
Ñ 0 = 3 Ñ 0 = 3 Ñ 0 = 2 Ñ 0 = 2
Ñ 0 = 3
Æ = 1 Æ = 1
Æ = 1
Ø = 1 Ø = 3
Æ = 1
ä )
Ñ 0 = 3 Ñ 0 = 3 Ñ 0 = 3 Ñ 0 = 3
Ø = 1 Ø = 1
Ø = 3 Ø = 3
Ø = 3
Æ = 1
Æ = 1
Æ = 1
Ø = 2
Ø = 2 Ø = 2 Ø = 2
Ø = 2
å )
Ð è ñ . 2 . 1
11
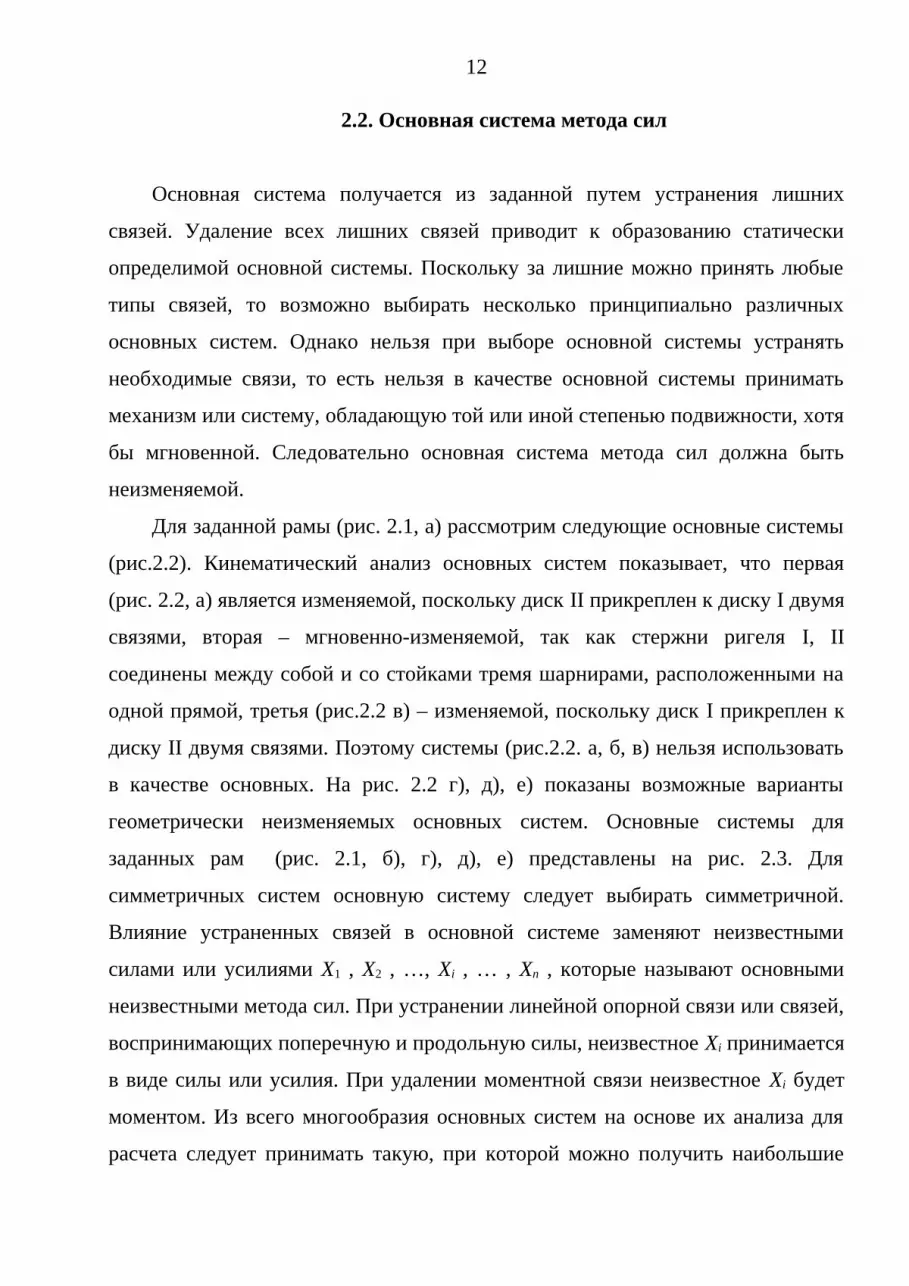
2.2. Основная система метода сил
Основная система получается из заданной путем устранения лишних
связей. Удаление всех лишних связей приводит к образованию статически
определимой основной системы. Поскольку за лишние можно принять любые
типы связей, то возможно выбирать несколько принципиально различных
основных систем. Однако нельзя при выборе основной системы устранять
необходимые связи, то есть нельзя в качестве основной системы принимать
механизм или систему, обладающую той или иной степенью подвижности, хотя
бы мгновенной. Следовательно основная система метода сил должна быть
неизменяемой.
Для заданной рамы (рис. 2.1, а) рассмотрим следующие основные системы
(рис.2.2). Кинематический анализ основных систем показывает, что первая
(рис. 2.2, а) является изменяемой, поскольку диск II прикреплен к диску I двумя
связями, вторая – мгновенно-изменяемой, так как стержни ригеля I, II
соединены между собой и со стойками тремя шарнирами, расположенными на
одной прямой, третья (рис.2.2 в) – изменяемой, поскольку диск I прикреплен к
диску II двумя связями. Поэтому системы (рис.2.2. а, б, в) нельзя использовать
в качестве основных. На рис. 2.2 г), д), е) показаны возможные варианты
геометрически неизменяемых основных систем. Основные системы для
заданных рам (рис. 2.1, б), г), д), е) представлены на рис. 2.3. Для
симметричных систем основную систему следует выбирать симметричной.
Влияние устраненных связей в основной системе заменяют неизвестными
силами или усилиями Х1 , Х2 , …, Хi , … , Хn , которые называют основными
неизвестными метода сил. При устранении линейной опорной связи или связей,
воспринимающих поперечную и продольную силы, неизвестное Хi принимается
в виде силы или усилия. При удалении моментной связи неизвестное Хi будет
моментом. Из всего многообразия основных систем на основе их анализа для
расчета следует принимать такую, при которой можно получить наибольшие
12

упрощения как за счет более простого вида эпюр, так и за счет их
ортогональности.
à )
I I
x 1
x 2
I
á )
I I
x 1
I
x 1
x 1 x 2
x 2
x 3 â )
I
ã )
I I
x 1 x 1
x 2 x 2
x 3 x 3 x 2
x 1
x 1
ä )
x 2 x 2
x 3 x 3
å )
x 3
x 2
x 1
Ð è ñ . 2 . 2
13

á )
x 2
x 1 x 3
à )
x 3
x 2
x 1
â ) ã )
x 1 x 1
x 2 x 2
x 4
x 3 x 4
x 1
x 1 x 2 x 2
x 3 x 3
å )
Ð è ñ . 2 . 3
x 1 x 1
x 2 x 2
x 4 x 3
ä ) x 1
x 2
x 4 x 3
x 5
x 3
14

2.3. Канонические уравнения метода сил
Принятая основная система по своей работе будет отличаться от заданной.
Если в основной системе точки приложения лишних неизвестных усилий Х1 , Х2
, … , Хi , … , Хn имеют линейные и угловые перемещения, то в заданной системе
эти перемещения равны нулю, так как в ней существуют связи,
препятствующие этим перемещениям. Поэтому, для приведения соответствия
работ основной и заданной систем, необходимо на основную систему наложить
некоторые ограничения. Эти ограничения записываются в виде канонических
уравнений метода сил:
11 Х1 + 12 Х2 + … + 1n Хn + 1K = 0,21 Х1 + 22 Х2 + … + 2n Хn + 2K = 0, (2.5)………………………………………n1 Х1 + n 2 Х2 + … + n n Хn + n K = 0
или i j Х j + i K = 0, (i = 1, 2, … , n)
Смысл этих уравнений геометрический, то есть они выражают отсутствие
в основной системе перемещений точек приложения устраненных связей по их
направлению, вызванных заданным воздействием и лишними неизвестными
Х1, Х2 , … , Хi , … , Хn . Коэффициенты при неизвестных i j от Х j =1
определяются для системы с m стержнями, работающими преимущественно на
изгиб (рамы, балки), по формуле Мора-Максвелла
i j = . (2.6)
Перемещения i j разделяются на главные удельные перемещения, i i , j j ,
(i = j) , которые всегда положительны, и побочные удельные перемещения i j (i
j), которые могут принимать произвольные значения. Поскольку побочные
удельные перемещения по теореме Максвелла обладают свойством взаимности
i j = j i , то матрица коэффициентов канонических уравнений метода вил (2.5)
будет всегда симметрична по отношению к главной диагонали.
15

Свободные члены i K представляют собой перемещения в основной
системе от нагрузки i р , изменения температурного режима i t ,
кинематического воздействия i С и выражаются в виде
i K = i р + i t + i С . (2.7)
Слагаемое i р представляет собой перемещение в основной системе по
направлению силового фактора Хi от нагрузки. Оно определяется для систем,
работающих преимущественно на изгиб, по формуле Мора-Максвелла:
i р = , (2.8)
где - изгибающий момент в основной системе от действия единичного
неизвестного Хi = 1; - изгибающий момент от действия заданной нагрузки в
основной системе.
Вычисление изгибающих моментов в сечениях статически определимой
основной системы и построение эпюр от указанных воздействий выполняется
статическим способом вырезания узлов и простых сечений. Если ординаты
одной из эпюр , , изменяются по линейному закону, то для
вычисления перемещений i j и i р можно применять правило:
i j = ; i р = . (2.9)
Слагаемое i t (2.7) представляет собой перемещение в основной системе
изучаемой точки i по изучаемому направлению от изменения температурного
режима, определяемое по формуле:
i t = + , (2.10)
при условии постоянного изменения температуры по длине участка и
однородности материала. Здесь: - коэффициент линейного расширения
материала; t0 = (t1 + t2)/2 – приращение температуры по оси стержня; t1 –
приращение температуры наружных волокон; t2 – приращение температуры
внутренних волокон; t = t1 – t2 – перепад температур; h – высота сечения в
16

плоскости изгиба; и - площади эпюр нормальных сил и изгибающих
моментов на стержне с меняющейся температурой от одиночного силового
фактора (Рi =1 или Мi =1); Т – число стержней, на которых происходит
изменение температурного режима. Каждое слагаемое в (2.10) считается
положительным, если деформации, вызванные силовым фактором Рi =1 или Мi
=1 и изменением температурного режима совпадают, и отрицательным, если
эти деформации не совпадают.
Слагаемое i С в (2.7) представляет собой перемещение в основной системе
изучаемой точки i по изучаемому направлению от кинематического
воздействия, определяемое по формуле:
i С в= - rC i Сi , (2.11)
где rCi – реакция в связи, получившей кинематическое воздействие, от силового
фактора Рi =1 или Мi =1; Сi - величина кинематического воздействия.
Сумма произведений распространяется на все связи, получившие
перемещение, или осадку. Реакция rCi считается положительной, если ее
направление совпадает с направлением кинематического воздействия, и
отрицательной, если не совпадает.
2.4. Построение эпюр усилий в заданной системе
Решением системы канонических уравнений определяем действительные
значения основных неизвестных Х1 , Х2 , … , Хi , … , Хn . Изгибающие моменты
Мр в заданной системе от действующей нагрузки в соответствии с принципом
независимости действия сил могут быть вычислены, как сумма изгибающих
моментов в основной системе от заданной нагрузки и действительных
найденных значений неизвестных:
Мр = + Х j . (2.12)
Аналогично может быть построена эпюра изгибающих моментов от
изменения температурного режима М t
17

М t = + Х 1 + … + Х n (2.13)
и кинематического воздействия М С
М С = + Х 1 + … + Х n . (2.14)
Здесь и - изгибающие моменты в основной системе,
вызванные температурным и кинематическим воздействием, соответственно,
которые в частном случае для статически определимой основной системы
равны нулю.
Построенные эпюры изгибающих моментов должны удовлетворять
условиям равновесия узлов и кинематической проверке:
при расчете от нагрузки
S р = = 0; (2.15)
при расчете от изменения температурного режима
S t = t0 + t /H + = 0; (2.16)
при расчете от кинематических воздействий
S C = - Ci + = 0. (2.17)
Здесь = + + … +
= + + … + - изгибающий момент и продольная сила в
основной системе от суммарного действия Х1 =1, Х2 = 1, … , Хn =1.
Поперечные и продольные силы в сечениях заданной рамы Qр и Nр могут
быть вычислены по принципу независимости действия сил:
Qр = + Хj , (2.18)
Nр = + Хj , (2.19)
18

где , и , - поперечные и продольные силы в основной системе
от нагрузки и единичного значения неизвестного Хj =1, соответственно.
Эпюру поперечных сил Qp можно построить и по известной эпюре
изгибающих моментов МР . Для этого следует рассмотреть равновесие всех
вырезанных из системы стержней. Выделенный стержень или часть его
представляется в виде простой двухопорной балки, загруженной местной
нагрузкой и концевыми моментами, взятыми с эпюры изгибающих моментов
Мр (рис.2.4). Ординаты эпюры поперечных сил будут определяться
зависимостью:
Qр = + , (2.20)
где - значение поперечной силы от действия местной нагрузки на стержень
(балку); Мпр и Млев – правый и левый концевые моменты, взятые с эпюры Мр .
Концевые моменты считаются положительными, если вызывают растяжение
нижних волокон, и отрицательными – если верхних. Ординаты эпюр
поперечных сил от температурных Qt и кинематических воздействий QC можно
вычислить согласно (2.20), полагая отсутствующими поперечные силы от
местного воздействия.
Построение эпюр продольных сил от нагрузки Np , изменения
температурного режима Nt и кинематических воздействий NC выполняется
способом последовательного вырезания узлов. Для этого к вырезанному с эпюр
QP , Qt , QC узлу прикладывают поперечные силы с учетом их знаков (рис. 2.5),
неизвестные продольные силы, принимая их растягивающими, и узловые
внешние нагрузки. Начиная с двухстержневого узла, составляют уравнения
равновесия в виде
Х = 0, Y = 0. (2.21)
Определяют неизвестные продольные силы и выполняют построения
соответствующих эпюр NP , Nt , NC . Для оценки правильности построенных
эпюр поперечных и продольных сил выполняется статическая проверка,
19

основанная на рассмотрении равновесия отсеченных частей системы. Разрезая
систему произвольным сечением и заменяя действие устраненной части
усилиями М, Q, N, составляем уравнения равновесия:
Х = 0, Y = 0, МА = 0, (2.22)
2.5. Примеры расчета статически неопределимых рам методом сил
Пример 1. Выполнить расчет статически неопределимой рамы (рис.2.6),
вычислить усилия и построить эпюры изгибающих моментов, поперечных и
продольных сил от заданной нагрузки.
Решение
1.Определяем степень статической неопределимости рамы:
Л = 3К – Ш = 32 – 4 = 2
2.Выбираем основную систему (рис.2.7)
3.Составляем каноническое уравнение метода сил (2.5)
4.Строим эпюры изгибающих моментов в основной системе от неизвестных
Х1 = 1, Х2 = 1 и от заданной нагрузки (рис.2.8-2.10).
5.Определим перемещения в основной системе по правилу Верещагина
(2.9):
11 = = 797/3EJ1 + 21/2772/37/EJ1 + 737/3EJ1 +
+ 21/2762/37/3EJ1 + 1/2772/37/EJ1 = 604,333/EJ1 (м/кН);
22 = = 1/2992/39/3EJ1 + 1/2332/33/3EJ1 +
+ 1/2362/33/3EJ1 + 1/2792/39/EJ1 + 1/2692/39/3EJ1 = 333/EJ1
(м/кН);
20

Ð è ñ . 2 . 4
l
M ë å â Ì ï ð
R ë å â R ï ð
Ð q
Q 3
Q 1 Q 2
- -
-
+ +
+
Ð è ñ . 2 . 5
Q 3
Q 1
Q 2
Q 1
Q 2
Q 3
Q 1
Q 3
Q 2
N 2
N 1
N 3
7 ì 7 ì 7 ì
J 2 = 3 J 1 J 2 = 3 J 1
J 1
J 2 = 3 J 1 P = 1 0 ì
q = 6 ê Í / ì
J 1
3 ì
3 ì
3 ì
Ð è ñ . 2 . 6
21

Ð è ñ . 2 . 8
õ 1 = 1
õ 1 = 1
2
7 / 6
1
7 / 6
7
1 7
7 7
7 7
7 M 0
1
Ð è ñ . 2 . 9
õ 2 = 1 õ 2 = 1
3 / 2
9
1 9
9
3 M 0
2 1 / 2
9 / 7 9 / 7
P = 1 0 ì
Ð è ñ . 2 . 7
q = 6 ê Í / ì
õ 1
õ 1 õ 2 õ 2
22

Ð è ñ . 2 . 1 0 6 7 , 2 8 6
2 4 , 5
2 5 , 2 8 6
3 4 , 5
1 4 7
4 2
1 4 7
1 4 7
M 0 ð
q = 6 ê Í / ì
1 4 7
1 7 7 P = 1 0 ì
1 0 3 , 5
Ð è ñ . 2 . 1 1
õ 1 = 1
õ 1 = 1
2 3 / 7 1 6 / 7
8 / 3
2 1
2
7 7 7
1 6
1 0 M 0
S
õ 2 = 1
õ 2 = 1
5 / 3 1
2 , 5
0 , 8 0 9 2 0 , 4 0 4 6
0 , 4 7 2 0
2 , 8 3 2 2 2 , 8 3 2 2
0 , 4 7 2 0
Ð è ñ . 2 . 1 2
õ 1 = 0 , 4 0 4 6
0 , 4 0 4 6 2 , 8 3 2 2
2 , 8 3 2 2
õ 1 = 0 , 4 0 4 6
2 , 8 3 2 2
2 , 8 3 2 2
M 0 1 x 1
23

21 = 12 = = – 1/2997/3EJ1 + 1/2337/3EJ1 +
+ 1/2362/37/3EJ1 + 1/2972/37/EJ1 + 1/2962/37/3EJ1 = 119/EJ1
(м/кН);
1p = = 14797/3EJ1 + 1/371473/47/EJ1 –
– 1/371473/47/EJ1 – 14737/3EJ1 – 1/214762/37/3EJ1 – 1/217772/37/EJ1 – – 1/21773(2/37 – 1/33,5)/3EJ1 – 1/2103,553(2/33,5 + 1/37)/3EJ1 – – 1/2103,532/33,5/3EJ1 = - 2397,5/EJ1 (м);
2p = = – 14791/29/3EJ1 – 14731/23/3EJ1 –
– 1/214762/33/3EJ1 –1/217772/39/EJ1 – 1/21773(2/39 + 1/34,5)/3EJ1 – – 1/2103,53(2/34,5 + 1/39)/3EJ1 – 1/2103,532/34,5/3EJ1 = – 7345,5/EJ1 (м).
6.Решаем систему канонических уравнений и определяем действительные
значения лишних неизвестных
Х1 = - 0,4046 кН; Х2 = 22,2032 кН.
7.Строим эпюры изгибающих моментов в основной системе от
вычисленных значений неизвестных (рис.2.12, 2.13)
8.Строим эпюру изгибающих моментов Мр в заданной раме от нагрузки
(2.12) (рис.2.14).
9.Строим суммарную эпюру изгибающих моментов (рис.2.11).
10.Выполняем кинематическую проверку правильности построения эпюры
Мр (2.15):
Sp = = 1/2955,661(2/32 – 1/37)/3EJ1 +
+ 1/29144,1678(2/37 – 1/32)/3EJ1 – 2/37672/31/27/EJ1 +
+ 1/2144,167872/37/EJ1 + 2/37672/81/27/EJ1 – 7149,83282/37/
EJ1 – – 1/2149,83223(2/37 + 1/310)/3EJ1 –
1/283,22263(2/310 + 1/37)/3EJ1 – – 1/2683,22262/310/3EJ1 +
1/219,996672/316/EJ1 + 1/219,99663(2/316 +
24

+ 1/38)/3EJ1 – 1/235,0017(2/38 + 1/316)/3EJ1 – 1/235,00172/38/3EJ1
= = (4099,5978 – 4099,412)/EJ1 = 0,1099/EJ1 0,1 % .
11.Определяем поперечные силы в каждом стержне рамы (2.20) (рис.2.15-2.18):
стержень 1 - 2
Мпр = - 144,1678 кНм; Млев = 55,6610 кНм; = = 0; Q12 = Q21 = 0 +
+ ( - 144,1678 – 55,661)/9 = - 28,2032 (кН);
стержень 2 - 3
Мпр = 0; Млев = – 144,1678 кНм; = 67/2 = 21; = – 67/2 = – 21; Q23 =
= 21 + (0 – ( – 144,1678))/7 = 41,5955 кН; Q32 = – 21 + (0 – 9 – 141,1678))/7 =
= – 0,4046 (кН);
стержень 3 - 4
Мпр = – 149,8322 кНм; Млев = 0; = 67/2 = 21; = – 67/2 = – 21; Q34 = 21 +
+ ( – 149,8322 – 0)/7 = – 0,4046 кН; Q43 = – 21 + ( – 149,8322 – 0)/7 =
= – 42,4046 (кН);
стержень 4 - 5
Мпр = 149,8322 кНм; Млев = 83,2226 кНм; = = 0; Q45 = Q54 = 0 +
+ (149,8322 – 83,2226)/3 = 22,2032 (кН);
стержень 5 - 6
Мпр = 83,2226 кНм; Млев = 0; = = 0; Q56 = Q65 = 0 + (83,2226 – 0)/6 =
= 13,8704 (кН);
стержень 7 - 8
Мпр = 19,9966 кНм; Млев = 0; = – 10/2 = – 5 кН; = 10/2 = 5 кН; Q87 = – 5 + +
(19,9966 - 0)/6 = – 1,6672 кН; Q78 = 5 + (19,9966 – 0)/6 = 8,3328 (кН);
стержень 5 - 7
Мпр = – 19,9966 кНм; Млев = 0; = = 0; Q57 = Q75 = 0 + (– 19,9966 – 0)/7 =
= – 2,8566 (кН).
12.Строим эпюру поперечных сил Qp в заданной раме от нагрузки (рис. 2.19).
25

Ð è ñ . 2 . 1 3
õ 2 = 2 2 , 2 0 3 2 õ 2 = 2 2 , 2 0 3 2
2 8 , 5 4 7 0 2 8 , 5 4 7 0
3 3 , 3 0 4 8 2 2 , 2 0 3 2 1 9 9 , 8 2 8 8
1 9 9 , 8 2 8 8
6 6 , 6 0 9 6 1 1 , 1 0 1 6
1 9 9 , 8 2 8 8
M 0 2 x 2
1 4 4 , 1 6 7 8
8 3 , 2 2 2 6
q = 6 ê Í / ì
1 4 9 , 8 3 2 2
1 9 , 9 9 6 6 P = 1 0 ê Í
5 , 0 0 1 7
M ð
5 5 , 6 6 1 0 1
2 3 4
5
6
7
8
9 ì
5 5 , 6 6 1
1 4 4 , 1 6 7 8
1
2
Ð è ñ . 2 . 1 4
-
- 2 2 , 2 0 3 2 Ð è ñ . 2 . 1 5
7 ì
1 4 4 , 1 6 1 8
6 ê Í / ì
+
- 0 , 4 0 4 6 4 1 , 5 9 5 4
2 3
26

3 ì
8 3 , 2 2 2 6
1 4 9 , 8 3 2 2
5
4
+
2 2 , 2 0 3 2 Ð è ñ . 2 . 1 6
7 ì
1 4 9 , 8 3 2
- 0 , 4 0 4 6 - 4 2 , 4 0 4 6
3 4
6 ê Í / ì
-
6 ì
8 3 , 2 2 2 6
6
5
+
1 3 , 8 7 0 4
3 ì
1 9 , 9 9 6 6
8
7
- 1 , 6 6 7 2
Ð è ñ . 2 . 1 7
3 ì
Ð = 1 0 ê Í +
-
8 , 3 3 2 8
Ð è ñ . 2 . 1 8
7 ì
1 9 , 9 9 6 8
- 2 , 8 5 6 6
6 7
-
27

P = 1 0 ê Í
Ð è ñ . 2 . 1 9
q = 6 ê Í / ì
+
+
- +
-
+ -
Q ð
- 2 2 . 2 0 3 2 1 3 , 8 7 0 4
- 0 , 4 0 4 6 - 4 2 , 4 0 4 6
2 2 , 2 0 3 2 4 1 , 5 9 5 4
- 2 , 8 5 6 6
8 , 3 3 2 6 - 1 , 6 6 7 2
1
2 3
4
5
6 8
7
4 1 , 5 9 5 4
2 2 , 2 0 3 2
N 2 3
N 2 1
ó
õ 2
4 2 , 4 0 3 6
2 2 , 2 0 3 2
N 4 3
N 4 3
ó
4
õ
2 , 8 5 6 6
8 , 3 3 2 8
N 7 5
N 7 8
ó
7
õ
2 , 8 5 6 6
1 3 , 8 7 0 4
N 5 7
N 5 6
õ 5
ó
N 4 6 = 4 2 , 4 0 4 6 2 2 , 2 0 3 2
Ð è ñ . 2 . 2 0
28

13.Определяем продольные силы в стержнях рамы (рис.2.20) (2.21)
узел 2
Х = 0; N23 - 22,2032 = 0; N23 = 22,2032 кН (сжат)
Y = 0; - N21 – 41,5954 = 0; N21 = - 41,5654 кН (сжат);
узел 4
Х = 0; - N43 - 22,2032 = 0; N43 = - 22,2032 кН (сжат)
Y = 0; - N45 – 42,4046 = 0; N45 = - 42,4046 кН (сжат);
узел 5
Х = 0; N57 + 22,2032 – 13,8704 = 0; N57 = - 8,3328 кН (сжат)
Y = 0; - N56 – 42,4046 + 2,8566 = 0; N56 = - 39,5480 кН (сжат);
узел 7
Х = 0; - N75 – 8,3328 = 0; N75 = - 8,3328 кН (сжат)
Y = 0; - N78 – 2,8566 = 0; N78 = - 2,8566 кН (сжат).
14.Строим эпюру продольных сил Np в заданной раме от нагрузки
(рис.2.21).
15.Выполняем статическую проверку решения, рассматривая равновесие
отсеченной части рамы (2.22).
Х = 0; 22,2032 – 13,8710 + 1,6672 – 10 = 0;
Y = 0; - 614 + 41,5954 + 39,548 + 2,8566 = 0;
М1 = 0; 55,6610 + 6147 – 39,54814 – 2,856621 - 103 = 0.
Пример 2. Выполнить расчет статически неопределимой рамы (рис. 2.23)
от действия нагрузки.
Решение
1.Определяем степень статической неопределимости рамы
Л = 32 – 5 = 1.
2.Выбираем основную систему (рис. 2.24).
3.Составляем каноническое уравнение метода сил:
11Х1 + 1р = 0.
29

P = 1 0 ê Í
Ð è ñ . 2 . 2 1
q = 6 ê Í / ì
-
-
-
- N ð
- 4 1 , 5 9 5 4 - 3 9 , 5 4 8 0
- 2 2 , 2 0 3 2
- 4 2 , 4 0 4 6
- 2 , 8 3 5 6 1
2
3
4
5
6 8
7
- 8 , 3 3 2 8 -
P = 1 0 ê Í
Ð è ñ . 2 . 2 2
q = 6 ê Í / ì
1 3 , 8 7 1 0
3 9 , 5 4 8 0 2 , 8 5 6 6 1 , 6 6 7 2
2 2 , 2 0 3 2
5 5 , 6 6 1 0
4 1 , 5 9 5 4
ó
7 ì 7 ì 7 ì
õ
3 ì
3 ì
3 ì 1
2 3
4
5 7
6 8
30

Ð è ñ . 2 . 2 3
E J
E J 2 E J E J
E J
q l q
l / 2
l / 2
Ð è ñ . 2 . 2 4
q l q
l l
x 1 x 1
Ð è ñ . 2 . 2 5
x 1 x 1
Ð è ñ . 2 . 2 6
q l q
0 , 3 7 5 q l 2
1 / 2
M 0 1
1 / 2 0 , 5 q l 2
0 , 7 5 q l 2
M 0 p
q l
0 , 2 5 q l 0 , 7 5 q l
Ð è ñ . 2 . 2 7 Ð è ñ . 2 . 2 8
q l
0 , 3 7 5 q l 2
0 , 4 6 5 q l 2
M 0 1 x 1
0 , 0 3 5 q l 2
M p 1
2
6
x 1 = 0 , 9 3 1 q l x 1 = 0 , 9 3 1 q l
0 , 4 6 5 q l 2
q
0 , 2 1 9 q l 2
3
0 , 2 8 5 q l 2
4
5 0 , 2 3 6 q l 2
0 , 4 6 5 q l 2
4.Строим эпюры изгибающих моментов в основной системе от Х1 = 1
(рис.2.25) и от нагрузки (рис. 2.26).
5.Определяем перемещения:
11 = 1/2 /2 /22/3 /21/EJ2 + /22 /21/2EJ = 3/3EJ = 0,333 3/3EJ;
31

1р = 1/2 /2 /2(2/30,5q 2 + 1/30,375q 2)1/EJ + 2/3q 2 /32 /21/2 /21/EJ
+ (0,5 + 0,75) q 2/2 /21/2EJ + 1/20,75 q 2 /21/2EJ = 0,31 q 4/EJ.
6.Решая каноническое уравнение 0,333 3Х1 + 0,31 q 4 = 0, получим Х1 =
– 0,931 q .
7.Строим эпюру изгибающих моментов в основной системе от Х1 = – 0,931
q (рис.2.27).
8.Строим эпюру изгибающих моментов Мр в заданной раме от нагрузки
(рис. 2.28).
9.Выполняем кинематическую проверку правильности построения эпюры
Мр .
1р = 1/2 /2 /2(1/30,375q 2 + 2/30,035q 2)1/EJ + 2/3q 2 /32 /21/2 /21/EJ
– – (– 0,035 + 0,465) q 2/22 /21/2EJ + 1/20,5 q 22 /21/2EJ –
–1/20,465 q 2 /22/3 /21/EJ = (0,14615 – 0,14625) q 4/EJ = – 0,0001 q 4/EJ
(ошибка 0,07 %).
10.Определяем поперечные силы в стержнях рамы (рис. 2.29)
Q12 = + = q ;
Q21 = - + = 0,5 q ;
Q23 = + = - 0,43q ;
Q32 = – + = - 0,93q ;
Q45 = Q54 = 0 + = 0,93 q ;
Q34 = + = 0,25 q ;
Q43 = – + = - 0,75 q .
11.Строим эпюру поперечных сил в заданной раме от нагрузки (рис.2.30).
12.Определяем продольные силы в стержнях рамы (рис. 2.31).
узел 3: Х = 0; N34 + 0,93 q = 0; N34 = - 0,93 q (сжат);
32

Y = 0; - N32 - 0,25 q = 0; N32 = - 0,25 q (сжат);
узел 4: Х = 0; - N43 - 0,93 q = 0; N43 = - 0,93 q (сжат);
Y = 0; - N45 - 0,75 q = 0; N45 = - 0,75 q (сжат).
узел 2: Х = 0; N25 – 0,43 q - 0,5 q = 0; N25 = 0,93 q (растянут),
Y = 0; - N21 - 0,25 q = 0; N21 = - 0,25 q (сжат).
13.Строим эпюру продольных сил в заданной раме от нагрузки (рис.2.32).
14.Производим статическую проверку расчета, рассматривая равновесие
отсеченной части рамы (рис.2.33):
Х = 0; 0,43 q + 0,5 q - 0,93 q = 0.
Y = 0; 0,25 q - q + 0,75 q = 0.
M2 = 0; q /2 /4 + q - 0,75 q 2 + 0,375 q = 0.
Пример 3. Выполнить расчет статически неопределимой рамы и
построить эпюру изгибающих моментов (рис.2.34) от изменения
температурного режима, если = 10-5, EJ = 6104 кНм2.
Решение
1.Определяем степень статической неопределимости: Л = 32 – 5 = 1
2.Выбираем основную систему (рис. 2.35).
3.Составляем каноническое уравнение метода сил (2.5).
33

Ð è ñ . 2 . 2 9
1
2
l / 2 +
0 , 3 7 5 q l 2
0 , 5 q l
q l
q
2
3
l / 2
0 , 0 3 5 q l 2
0 , 9 3 q l
0 , 4 3 q l
q
0 , 3 7 5 q l 2
- 5
4
l / 2 +
0 , 4 6 5 q l 2
0 , 9 3 q l
0 , 0 3 5 q l 2
0 , 4 6 5 q l 2
l l
q l
0 , 2 5 q l
0 , 7 5 q l
+
-
Ð è ñ . 2 . 3 0
q l
0 , 4 3 q l
0 , 2 5 q l
Q p
q
q l
0 , 7 5 q l 0 , 9 3 q l 0 ,
9 3
q l
+ -
+ -
+
Ð è ñ . 2 . 3 2
q l
N p
q
q l
0 , 9 3 q l
0 ,
7 5
q l
-
-
-
+ 0 , 9 3 q l
0 , 2 5 q l
0 , 2 5 q l
0 , 4 3 q l
0 , 5 q l
N 3 4
N 3 2
N 2 5
N 2 1
2
3
0 , 9 3 q l
Ð è ñ . 2 . 3 1
0 , 7 5 q l
0 , 9 3 q l
N 4 3
N 4 5
4
34

Ð è ñ . 2 . 3 3
q l q
l / 2
2 l
0 , 3 7 5 q l 2
0 , 4 3 q l
0 , 2 5 q l 0 , 7 5 q l
0 , 9 3 q l 5 2
Ð è ñ . 2 . 3 4
E J
E J
6 ì 6 ì
3 E J 3 E J
2 0 0 Ñ 8 0 0 Ñ
8 0 0 Ñ
- 1 0 0 Ñ
- 2 0 0 Ñ 8 0 0 Ñ Í = 0 , 4 ì
Í = 0 , 4 ì
Í = 0 , 8 ì
4 ì
Ð è ñ . 2 . 3 5
2 0 0 Ñ 8 0 0 Ñ
8 0 0 Ñ
- 1 0 0 Ñ
- 2 0 0 Ñ 8 0 0 Ñ
Õ 1
Ð è ñ . 2 . 3 6
Õ 1 = 1 0 , 7 5
0 , 5
0 , 7 5
0 , 5
3 3
M 0 1
Ð è ñ . 2 . 3 7
Õ 1 = 1 0 , 7 5
0 , 5
0 , 7 5
0 , 5
N 0 1
Ð è ñ . 2 . 3 8
1 2 6 , 5 0 1
M t
1 2 6 , 5 0 1
+ +
+
-
0 , 7 5
1 , 0
0 , 5
0 , 5
M 0 1 x 1
35

4.Строим эпюры изгибающих моментов и продольных сил (рис. 2.36, 2.37)
в основной системе от Х1 = 1.
5.Определяем перемещения 11 и 1t в основной системе (2.9, 2.10):
11 = 1/2342/331/EJ2 + 1/2362/361/3 EJ2 = 36/ EJ;
1t = – 5014 + 350,756 + 300,54 + 90/0,81/236 +
+ 100/0,41/234 = 2530.
6.Решая каноническое уравнение
36/EJХ1 + 2530 = 0, или 36 Х1 +253010-56104 = 0,
или 36 Х1 + 1518 = 0, получим Х1 = - 42,167 кН.
7.Строим эпюру изгибающих моментов (2.13) от найденного значения Х1 =
- 42,167 кН в основной системе. Так как основная система принята статически
определимой, то Mt = Х1 .
8.Выполняем кинематическую проверку правильности построения эпюры
изгибающих моментов (2.16).
1t=253010-5–1/2342/3126,5011/(6104)2 – 1/2362/3126,5011/
/(36104)2 = 253010-5 – 2530.0210-5 = – 0,0210-5 (ошибка 0,0008 %).
Пример 4. Выполнить расчет статически неопределимой рамы (рис.2.39) и
построить эпюру изгибающих моментов от кинематического воздействия
(осадки опоры), если EJ = 6104 кНм2.
Решение
1.Определяем степень статической неопределимости: Л = 31 – 2 = 1.
2.Выбираем основную систему (рис.2.40).
3.Составляем каноническое уравнение метода сил (2.5).
4.Строим в основной системе эпюру изгибающих моментов от Х1 = 1 (рис.
2.41).
5.Определяем перемещения 11 и 1С в основной системе (2.9, 2.11):
36

E J E J
2 E J
C 1 = 0 , 0 2 ì
2 ì
2 ì
Ð è ñ . 2 . 3 9 6 ì
C 2 = 0 , 0 1 ì C 3 = 0 , 0 0 2
x 1 x 1
C 3
C 1
C 2
Ð è ñ . 2 . 4 0
x 1 = 1 x 1 = 1
Ð è ñ . 2 . 4 1
1 1
0 0
0 , 5 0 , 5 1 1 Ì 0 1
Ð è ñ . 2 . 4 2
3 1 , 7 6 5 3 1 , 7 6 5
1 1
Ì Ñ
3 1 , 7 6 5 3 1 , 7 6 5
M 0 1 x 1
37

11 = 1/2122/311/EJ4 + 1611/2EJ = 17/3EJ;
1С = - (0,50,01 + 00,02 - 10,002) = - 0,003.
6.Решая каноническое уравнение
17Х1 – 0,0033 EJ = 0, или 17 Х1 - 540 = 0, получим Х1 = 31,765 кНм.
7.Строим эпюру изгибающих моментов (2.14) (рис.2.42) от найденного
значения Х1 = 31,765 кНм. Так как основная система принята статически
определимой, то MС = Х1 .
8.Выполняем кинематическую проверку правильности построения эпюры
изгибающих моментов (2.17):
1С = – 0,003 + 1/2122/331,7651/(6104)4 + 1631,7651/(26104)
= = – 0,003 + 0,00300003 = 0,00000003 (ошибка 0,001 %).
Пример 5. Выполнить расчет статически неопределимых рам (рис.2.43) от
нагрузки, изменения температурного режима, осадки опоры и построить эпюры
изгибающих моментов. Результаты решения приведены на рис.2.43.
2.6. Задание для выполнения расчетно-графической работы «Расчет
плоской статически неопределимой рамы методом сил от нагрузки»
В работе следует от заданных нагрузок построить эпюры изгибающих
моментов Mp , поперечных Qp и продольных Np сил в соответствии с шифром
задания и произвести проверку правильности построения этих эпюр. Шифр
задания выбирается в соответствии с порядковым номером в учебной
ведомости (рис.2.44 – 2.47).
38

q = 5 0 ê Í / ì
Ð è ñ . 2 . 4 3
5 ì 1 0 ì 5 ì
5 ì
5 ì E J
2 E J
2 E J E J
2 E J
q = 5 0 ê Í / ì
2 4 5
M P
9 9 6 , 5
7 5 2
7 5 2
2 6 2 , 5
t 1 = - 1 5 0 1 4 , 8 8
7 , 4 4
M t 6 ì
8 ì 8 ì
t  = 2 5 0
E J 1 = 2 · 1 0 4 ê Í ì 2 E J 1
3 E J 1
H = 0 , 4 ì
3 E J 1
E J 1 = 3 · 1 0 4 ê Í ì 2
E J 1
3 E J 1
3 E J 1
4 , 5 ì 9 ì 4 , 5 ì
3 ì
3 ì
C = 0 , 0 3 ì
3 E J 1
1 0 , 1 7 1 0 , 1 7
2 0 , 3 4
M Ñ
39

1 0 ê Í
5 ê Í / ì 1 6 ê Í
1 ê Í / ì 7
2 ì
2
ì
2 ì 2 ì 4 ì 2 ì 2 ì 6 ì
3 ì
3
ì
8
3 ì
3
ì
3 ì 3 ì 2 0 ê Í
0 , 5 ê Í / ì
3 ì 2 ì
3 ì
3 ì
4 ê Í / ì
5 6
6 ì
4 ê Í / ì
3 ì
3
ì
6 ì
1 2 ê Í
6 ì
2 ì
2
ì
2 ì
5 ê Í / ì
2 ì
8 ê Í
6 ê Í ì
1 0 ê Í
2 ì
4 3
0 , 8 ê Í / ì 8 0 ê Í 2
ì
2 ì
6 ì 2 ì 6 ì
4 ì
2 0 ê Í
0 , 4 ê Í / ì
2 ì 2 ì
2 1
2 E J E J E J E J
E J
3 E J
2 E J
3 E J
2 E J E J
E J 2 E J 3 E J
E J E J
E J
E J
2 E J E J E J
3 E J E J 2 E J 2 E J
E J 3 E J E J 2 E J
E J
E J 3 E J
2 E J E J
E J
Ð è ñ . 2 . 4 4
40

0 , 6 ê Í / ì
1 4 ê Í
2 ì
2
ì
4 ì 4 ì
9 1 0 2 ê Í / ì
1 5 ê Í
6 ì 3 ì
2 ì
3 ì
2 ì
2 ì 2 ì 2 ì
4 ì
1
ì
1 ì
4 ê Í / ì
1 8 ê Í
4 ì 4 ì
3 ê Í / ì
9 ê Í 1 ,
5 ì
3
ì
1 ,
5 ì
1 2 1 1
2 ì
6 ì 2 ì
1 4
2 ì
5 ê Í / ì 1 8 ê Í
2 ì
6 ì 3 ì 3 ì
4 ê Í / ì
3 ì
3
ì
2 0 ê Í 1 3
3 ì
1 5
6 ì 3 ì
1 6
3 ì 2 ì 2 ì
1 , 4 ê Í / ì
8 ê Í 2 ì
2
ì
4 ì
3 ì
2 ê Í / ì
2 0 ê Í
3 ì
3
ì
2 E J
E J 2 E J 3 E J
2 E J E J
3 E J
2 E J E J 3 E J E J
E J
2 E J
3 E J E J
E J E J
3 E J E J
2 E J E J
E J
2 E J
3 E J E J
E J
3 E J E J 2 E J
2 E J
E J
3 E J
Ð è ñ . 2 . 4 5
41

42

2 1
4 ì 2 ì
3 ì 3 ì 3 ì
2 2
2 ì
4 ê Í / ì
2 ì
2
ì
4 ì
3 ì
3 ì
8 ê Í
2 ê Í / ì
4 ì
1 2 ê Í
6 ì 2 ì 2 ì
1 0 ê Í / ì
2 0 ê Í 2 ì
2
ì
6 ì
2 ì
2
ì
6 ì 8 ê Í
4 ê Í / ì 2 3 2 4
6 ì 6 ì
2 ì
2
ì
2 ê Í / ì 1 8 ê Í
6 ì 6 ì
2 ì
4
ì
2 ì
3 ê Í / ì 1 9 2 0
4 ê Í
4 ì
2 0 ê Í
2 ê Í / ì
1 ì 1 ì 2 ì
2 ì
2
ì
1 7 1 8
3 ì 3 ì 3 ì
1 2 ê Í 1 , 5 ê Í / ì
2 ì
2
ì
4 ì 3 E J E J
2 E J 2 E J E J
3 E J E J
3 E J E J
2 E J
2 E J
E J E J 3 E J
E J E J
3 E J 2 E J
3 E J
2 E J 3 E J
E J
E J 3 E J 2 E J
E J
2 E J 2 E J
3 E J 2 E J
3 E J 3 E J
Ð è ñ . 2 . 4 6
43

3. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ
Метод перемещений является одним из методов расчета статически
неопределимых систем. При расчете стержневых систем этим методом
вводятся следующие предпосылки:
1) пренебрегают влиянием продольных деформаций стержней малых по
сравнению с поперечными деформациями;
2) считают, что при деформациях рамы все стержни, примыкающие к
одному и тому же жесткому узлу, поворачиваются на один и тот же угол.
3.1. Выбор основной системы метода перемещений
Основную систему метода перемещений получают с помощью введения в
статически неопределимую часть заданной системы дополнительных
угловых и линейных связей.
Вводимые угловые связи, препятствуют только угловым смещениям и не
мешают линейным. Реакцией в такой связи будет момент. Угловые связи
вводятся во все жесткие свободные узлы заданной системы, что определяет их
количество и места постановки. Линейные связи препятствуют только
линейным перемещениям узлов и вводятся таким образом, чтобы все узлы
статически неопределимой части системы не имели бы линейной податливости.
Общее число связей равно сумме угловых и линейных связей, вводимых в
заданную систему: n = nуг + nлин .
3.1.2.Примеры выбора основных систем метода перемещений.
Для заданных статически неопределимых систем (рис.3.1) основные
системы показаны на рис.3.2.
Расчленяя основную систему по узлам, получим поэлементную схему
основной системы.
44

l
h
l 4
1 2
5
3 a )
l
h
l 4
1 2
5
3 á )
6
P
Ð è ñ . 3 . 1
4
1 2
5
3
â )
6
P 1
4
1 2
ã )
6
7 8
5 3
4
1 2
5
3 a ) á )
P
ñ â 1 ñ â 2 ñ â 1 ñ â 2 ñ â 3
ñ â 4
â )
P 1 ã )
Ð è ñ . 3 . 2
ñ â 2
ñ â 3
P 2
P 2
ñ â 1
ñ â 4
ñ â 1 ñ â 2
ñ â 3 ñ â 4
45
Она состоит обычно из статически неопределимых типовых элементов метода
перемещений (см. типовые таблицы), но может включать и статически
определимые элементы. Поэлементные схемы для основных систем показаны
на рис.3.3.
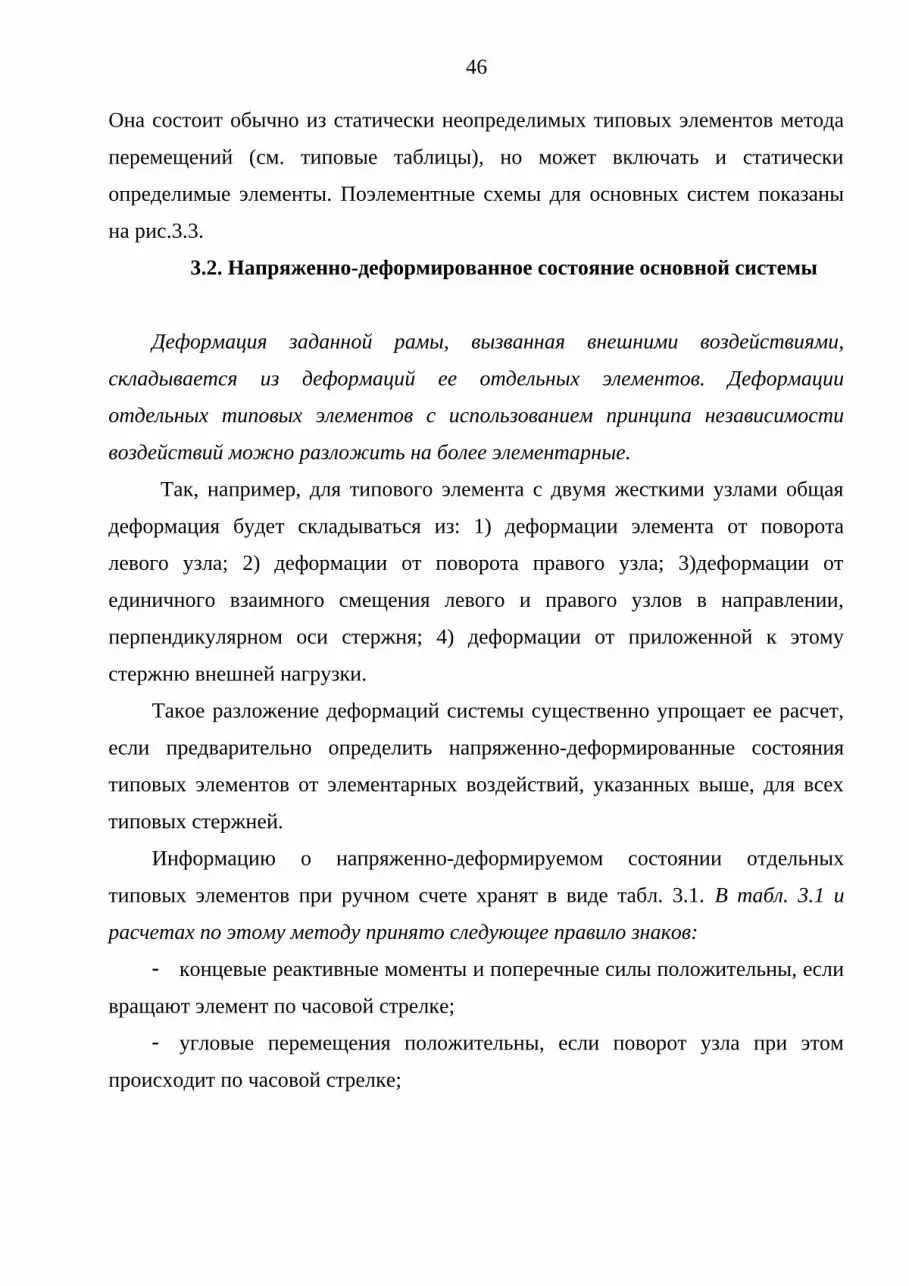
3.2. Напряженно-деформированное состояние основной системы
Деформация заданной рамы, вызванная внешними воздействиями,
складывается из деформаций ее отдельных элементов. Деформации
отдельных типовых элементов с использованием принципа независимости
воздействий можно разложить на более элементарные.
Так, например, для типового элемента с двумя жесткими узлами общая
деформация будет складываться из: 1) деформации элемента от поворота
левого узла; 2) деформации от поворота правого узла; 3)деформации от
единичного взаимного смещения левого и правого узлов в направлении,
перпендикулярном оси стержня; 4) деформации от приложенной к этому
стержню внешней нагрузки.
Такое разложение деформаций системы существенно упрощает ее расчет,
если предварительно определить напряженно-деформированные состояния
типовых элементов от элементарных воздействий, указанных выше, для всех
типовых стержней.
Информацию о напряженно-деформируемом состоянии отдельных
типовых элементов при ручном счете хранят в виде табл. 3.1. В табл. 3.1 и
расчетах по этому методу принято следующее правило знаков:
концевые реактивные моменты и поперечные силы положительны, если
вращают элемент по часовой стрелке;
угловые перемещения положительны, если поворот узла при этом
происходит по часовой стрелке;
46

линейное перемещение считается положительным, если при его
реализации поворот стержня происходит по часовой стрелке. – изгибная
жесткость стержня.
l
h
l 4
a ) á ) 1 2
3
5
2
2
l l 4
1
2
3
5
2
2
h
6
3 1
P
Ð è ñ . 3 . 3
3
â )
P 1
ã )
1 2
5
4
6 4
2 1
P 2
3
4
1
4
7
2
5
5
6 4 3
3.3. Канонические уравнения метода перемещений
Основная система метода перемещений (рис. 3.5) отличается от заданной
(рис. 3.4) за счет введения в последнюю дополнительных связей 1 и 2 и
появлением в этих связях реакций. Приведем напряженно деформируемое
состояние заданной и основной систем в соответствие друг с другом. Для этого:
1) в основной системе дадим узлам с вновь введенными связями
соответствующие им неизвестные пока перемещения Z1 и Z2 , которые
допускает заданная система; и 2) потребуем, чтобы реакции в этих связях,
вызванные перемещениями Z1, Z2 и внешними воздействиями были равны
47

нулю, поскольку в заданной раме такие связи отсутствуют. Такие условия
накладываются на каждую введенную связь основной системы. В результате, в
нашем частном случае получим систему из двух уравнений с двумя
неизвестными перемещениями.
,
.
В общем случае для системы с n неизвестными будем иметь систему из n
уравнений
,
где i=(1,2,…, n). Здесь удельная реакция в связи i, вызванная
перемещением связи j на единицу. В совокупности эти реакции определяют
коэффициенты при неизвестных в канонических уравнениях. – реакция в
связи i от заданной нагрузки. В совокупности эти реакции определяют
свободные члены канонических уравнений. Zj – неизвестные перемещения ( j =
1,2,…, n).
Канонические уравнения имеют статический смысл, так как выражают
равенство нулю реакций во вновь введенных связях основной системы.
48

 è ä â î ç ä å é ñ ò â è ÿ Ê î í ö å â û å ð å à ê ö è è
4 i a b
Ò à á ë è ö à 3 . 1
- 6 i a b l a b
Ì à b Ì b à Q à b Q b à C ò å ð æ í å â î é ý ë å ì å í ò ñ ä â ó ì ÿ ç à ù å ì ë å í í û ì è ê î í ö à ì è
a Q b a
j = 1 Ì à b
Q a b
Ì b a
b i à b
l à b
Q b a Q a b
Ì b a Ì à b
-
- 6 i a b l a b
2 i a b
a Q b a
d = 1
Ì à b
Q a b
Ì b a
b i à b
l à b
Q b a Q a b
Ì b a Ì à b
+
- 6 i a b l a b
- 6 i a b l a b
1 2 i a b
l 2 a b
1 2 i a b
l 2 a b
a Q b a
Ì à b
Q a b
Ì b a
b i à b l à b
Q b a Q a b
Ì b a Ì à b
- q l 2 a b
1 2 q l a b 2
q
+ -
q l 2 a b
1 2 - q l a b 2
P b 2
l 2 a b a
Q b a
Ì à b
Q a b
Ì b a b i à b
l à b
Q b a Q a b
Ì b a Ì à b
P
a b
- +
Û
( 1 + 2 a l a b
) Û
P 2
P à 2
l 2 a b
Û
( 1 + 2 b l a b
) Û
- P 2
Ï ð è a = l a b / 2 Ï ð è a = l a b / 2 Ï ð è a = l a b / 2 Ï ð è a = l a b / 2
- P a b 2
l 2 a b
P a 2 b l 2 a b
- P l 2 a b
8 P l a b 8
49
 è ä â î ç ä å é ñ ò â è ÿ Ê î í ö å â û å ð å à ê ö è è
3 i a b
î ê î í ÷ à í è å ò à á ë è ö û 3 . 1
- 3 i a b l a b
Ì à b Ì b à Q à b Q b à C ò å ð æ í å â î é ý ë å ì å í ò ñ î ä í è ì ç à ù å ì ë å í í û ì è ä ð ó ã è ì ø à ð í è ð í û ì ê î í ö î ì
a Q b a
j = 1 Ì à b
Q a b b
i à b
l à b
Q b a Q a b
Ì à b
-
- 3 i a b l a b
0
a
Q b a
d = 1
Ì à b
Q a b
b i à b
l à b
Q b a Q a b
Ì à b
+
- 3 i a b l a b
0 3 i a b
l 2 a b
3 i a b
l 2 a b
a Q b a
Ì à b
Q a b b i à b l à b
Q b a Q a b
Ì à b
- q l 2 a b
8 5 q l a b 8
q
+ -
- 3 q l a b 8
P b 2 l a b a
Q b a
Ì à b
Q a b
b i à b
l à b
Q b a Q a b
Ì à b
P
a b
- +
õ
( 3 - b 2
l 2 a b
) õ
1 1 P 1 6
P à 2
2 l 2 a b
õ
õ
- 5 P 1 6
Ï ð è b = l a b / 2 Ï ð è a = l a b / 2 Ï ð è a = l a b / 2
- 3 P l a b 1 6
0
0 ( 3 - a l a b
)
- P b 2 õ
õ ( 1 - b 2
l 2 a b
)
50

l
q
h
Ð è ñ . 3 . 4 Ç à ä à í í à ÿ ð à ì à
Ç à ä à í í à ÿ ð à ì à
l
Ð è ñ . 3 . 5 Î ñ í î â í à ÿ ñ è ñ ò å ì à
Î ñ í î â í à ÿ ñ è ñ ò å ì à
ñ â 2
h
ñ â 1
Ð è ñ . 3 . 6 Ý ï þ ð à Ì 0 ð
P h / 8
q 2 l / 8
P
Ð è ñ . 3 . 7 Ý ï þ ð à Ì 0 1
3 E I / l
E I
E I
2 E I / h
4 E I / h z 1 = 1
Ð è ñ . 3 . 8 Ý ï þ ð à Ì 0 2
6 E I / h 2
6 E I / h 2 z 2 = 1
P
51

3.4. Определение коэффициентов и
свободных членов канонических уравнений
Удельные реакции и реакции от заданной нагрузки могут быть
определены статическим способом или с помощью перемножения эпюр.
Рассмотрим статический способ. Этот способ основан на уравнениях
равновесия статики. Определение реакций начинают с построения эпюр
изгибающих моментов в основной системе от единичных перемещений и от
заданной нагрузки (рис. 3.6-3.8). В каждом случае общая эпюра представляет
совокупность эпюр, построенных для типовых стержней системы по данным
табл. 3.1.
Реакции в угловых связях определяют из условия равновесия вырезанного
узла системы вместе со связью, в которой определяется реакция. Уравнение
равновесия имеет вид М узла = 0.
Реакции в линейных связях определяются из условия равновесия
отсеченной части основной системы, содержащей линейную (силовую) связь.
Сечение при этом проводится параллельно оси этой связи, а уравнение
равновесия имеет вид Х1 отс.части = 0. Ось совпадает с осью самой связи.
3.5. Определение неизвестных перемещений
Угловые и линейные перемещения для заданной рамы определяются
однозначно из решения системы канонических уравнений, где число уравнений
всегда равно числу неизвестных.
52

3.6. Построение эпюры изгибающих моментов в
заданной раме от заданной нагрузки
Эпюра изгибающих моментов в заданной раме может быть построена с
использованием принципа независимости воздействий по формуле:
Мр = + Zi , т.е. суммированием входящих в формулу эпюр,
где - эпюра изгибающих моментов в основной системе от заданной
нагрузки; Zi - эпюра изгибающих моментов в основной системе от
найденного значения неизвестного Zi такие эпюры строятся от каждого
неизвестного ZI .
3.7. Примеры расчета рам
Пример 1. Построить эпюру изгибающих моментов для заданной рамы
(рис.3.9).
Решение
1. Выбираем для заданной рамы основную систему метода перемещений
(рис. 3.10). Для этого вводим в заданную систему две связи: угловую связь в
жесткий узел 2 и линейную связь в узел 1 по горизонтальному направлению.
При этом узел 1 основной системы, как и все другие узлы (2,3,4,5,6), становятся
несмещаемыми.
2. Канонические уравнения для нашего примера, при двух введенных
связях, запишутся так:
,
.
53

4 , 0 ì
q
4 ,
0 ì
Ð è ñ . 3 . 9 . Ç à ä à í í à ÿ ð à ì à Ð è ñ . 3 . 1 0 . Î ñ í î â í à ÿ ñ è ñ ò å ì à
4 , 0 ì
4 ,
0 ì
3
, 0 ì
4 5 6
3
2
1
4 , 0 ì 4 , 0 ì
4 ,
0 ì
4 5 6
3
2
1
ñ â 1
ñ â 2
4 , 6 8 2 , 5 6
1 , 0 3 5
2 , 0 7 1 , 0 3 5
Ð è ñ . 3 . 1 4 Ý ï þ ð à Ì p Ð è ñ . 3 . 1 3 Ý ï þ ð à Ì 0 ð
Q 4
q 2 l / 8 = 4
R 0 2 p
1 1
4 6
z 1 = 1
2 E I / 7
4 E I / 7
3 E I / 5 3 E I / 5
Ð è ñ . 3 . 1 1 Ý ï þ ð à Ì 0 1 Ð è ñ . 3 . 1 2 Ý ï þ ð à Ì 0
2
z 2
Q 1
Q 2 Q 3
1 1
3 E I / 1 6 6 E I / 4 9
3 E I / 1 6
3. Для определения реакций в уравнениях построим эпюры изгибающих
моментов от единичных неизвестных Z1 =1 и Z2 =1 и от заданной нагрузки.
54
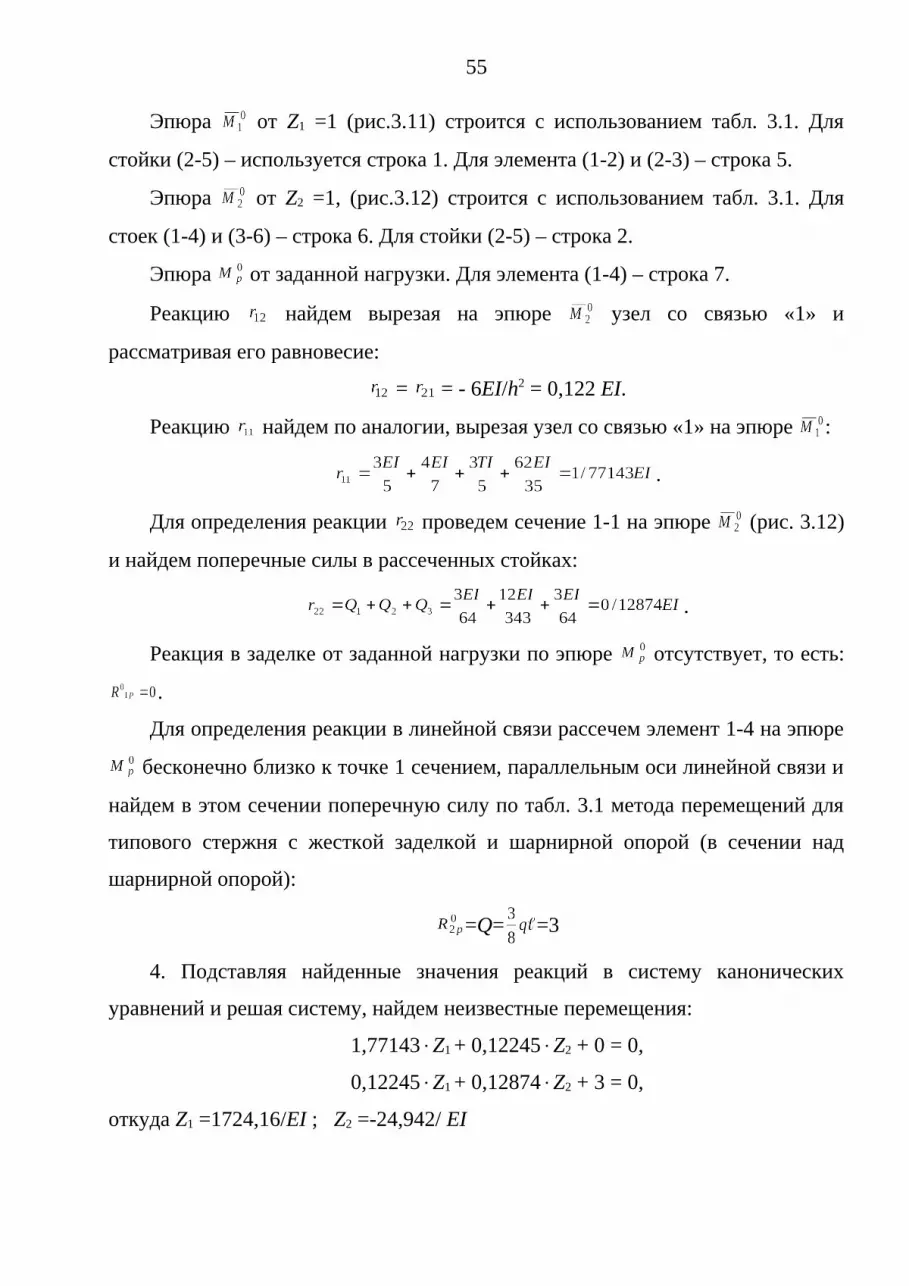
Эпюра от Z1 =1 (рис.3.11) строится с использованием табл. 3.1. Для
стойки (2-5) – используется строка 1. Для элемента (1-2) и (2-3) – строка 5.
Эпюра от Z2 =1, (рис.3.12) строится с использованием табл. 3.1. Для
стоек (1-4) и (3-6) – строка 6. Для стойки (2-5) – строка 2.
Эпюра от заданной нагрузки. Для элемента (1-4) – строка 7.
Реакцию найдем вырезая на эпюре узел со связью «1» и
рассматривая его равновесие:
= = - 6EI/h2 = 0,122 EI.
Реакцию найдем по аналогии, вырезая узел со связью «1» на эпюре :
.
Для определения реакции проведем сечение 1-1 на эпюре (рис. 3.12)
и найдем поперечные силы в рассеченных стойках:
.
Реакция в заделке от заданной нагрузки по эпюре отсутствует, то есть:
.
Для определения реакции в линейной связи рассечем элемент 1-4 на эпюре
бесконечно близко к точке 1 сечением, параллельным оси линейной связи и
найдем в этом сечении поперечную силу по табл. 3.1 метода перемещений для
типового стержня с жесткой заделкой и шарнирной опорой (в сечении над
шарнирной опорой):
=Q= =3
4. Подставляя найденные значения реакций в систему канонических
уравнений и решая систему, найдем неизвестные перемещения:
1,77143Z1 + 0,12245Z2 + 0 = 0,
0,12245Z1 + 0,12874Z2 + 3 = 0,
откуда Z1 =1724,16/EI ; Z2 =-24,942/ EI
55

5. Умножая все ординаты эпюры на Z1 , а ординаты эпюры на Z2 и
сложив их с эпюрой , получим эпюру Мр в заданной раме от заданной
нагрузки (рис. 3.14).
4. РАСЧЕТ СТЕРЖНЕВЫХ СИСТЕМ МЕТОДОМ
КОНЕЧНЫХ ЭЛЕМЕНТОВ
Метод конечных элементов является одним из наиболее распространенных
методов решения задач строительной механики твердого деформируемого тела.
Сущность его состоит в том, что заданная система разбивается на отдельные
элементы конечных размеров. Для стержневых систем конечными элементами
могут быть стержни или части стержней; для двухмерных областей –
прямоугольные или треугольные конечные элементы; для трехмерных областей
– тетраэдры или параллелепипеды (рис. 4.1). Независимо от вида каждый
элемент сохраняет все физические и геометрические свойства заданной
расчетной схемы.
Форма конечных элементов должна быть удобна для исследования их
напряженно-деформированного состояния при внешних воздействиях и силах
взаимодействия между соседними элементами. Конечные элементы
объединяются в заданную систему из условий равновесия, равенства
деформаций и перемещений в узловых точках, соединяющих эти элементы.
Сопряжение элементов в узлах осуществляется на основе дополнительных
условий, характеризующих напряженно-деформированное состояние конечных
элементов. Таким образом, в методе конечных элементов выбором узловых
точек любая заданная система заменяется основной системой с конечным
числом степеней свободы, где анализируются силы и перемещения в узлах. Это
позволяет выполнять расчеты не только стержневых систем, но и пластин,
оболочек, массивов.
56

Решение может быть выполнено по методу сил, если за неизвестные
принимаются силы взаимодействия между конечными элементами в местах их
соединения, или по методу перемещений, когда за неизвестные принимаются
перемещения узлов, соединяющих элементы. В методе сил неизвестные силы
должны обеспечивать равенство перемещений конечных элементов в узлах, а в
методе перемещений неизвестные перемещения должны удовлетворять
условиям равновесия узлов. Метод конечных элементов в форме метода
перемещений является более удобным по сравнению с другими, поэтому он
получил наибольшее распространение. Хотя в основном метод конечных
элементов используется для расчета континуальных систем, пластин, плит,
оболочек, массивов и систем, состоящих из них, его можно применять и к
стержневым системам.
В данном пособии рассмотрен метод конечных элементов для расчета
только стержневых и шарнирно-стержневых систем. Здесь рассмотрен процесс
формирования матрицы жесткости стержневого конечного элемента, матрицы
жесткости стержневой системы и примеры решения задач методом конечных
элементов.
57

P 2
P 3
P 1
1 2 3 4
5
1 2
6
3
4
5
8 6
9
r m - 1 n
m n - 1
7
x
y
y
x
r
1 2 3 4 5
i j
n m
P n
P 2 P 1
Ð è ñ . 4 . 1
P 2 P 1
P n
K
r
i j
58

4.1. Матрица жесткости стержневого конечного элемента
Рассмотрим раму (рис.4.2), состоящую из m прямолинейных стержней
постоянного по длине поперечного сечения, соединенных n узлами при
узловой нагрузке. Положительные направления нагрузок характеризуются
векторами и . Индекс T означает операцию
транспонирования.
Введем две системы координат: общую ХОУ и местную Н. Нумерация
узлов в общей системе будет i, j в местной – н, к. Рассмотрим стержень (рис.4.3)
ij длиной , координаты которого до деформации х/i , y/
i , х/j , y/
j . После
деформации координаты получили приращения хi , yi , хj , yj . Составим вектор
перемещений концов стержня в общей системе координат:
= , (4.1)
где xi , yi , i , xj , yj , j – линейные и угловые перемещения узлов стержня в
общей системе координат. Вектор перемещений концов стержня в местной
системе координат будет
= , (4.2)
где - линейные и угловые перемещения в местной системе
координат. Составим зависимость между векторами и . Для этого выразим
проекции перемещения i (рис.4.3) на оси координат:
uн = хi cos + yi sin,
н = - хi sin + yi cos.
Используя эти зависимости и условия равенства угловых перемещений i = н ,
j = k , получим:
= = ,
59

1 3
h
H
S n
j
x
y
i b
P j
F
l
O 2
j i
i
y i
x i
j j
j x j
y j
m i
i
P y i
P x i P n
m j
j
P y j
P x j
Ð è ñ . 4 . 2
P i
V H
h
H
j
x
y
i
b V K
l
O
Ð è ñ . 4 . 3
j *
K * y j
y / j
j j
F
D i F
H *
K
i *
U H
U K
j i
y / i
y i
D j
x j x / j x / i x i
60

где =
формируется по координатам узлов i, j в общей системе координат (рис.4.3):
= ;
сos = , sin = .
Для стержня ij получим:
= , где = . (4.3)
Умножая обе части (4.3) на и учитывая единичную матрицу = ,
получим:
= . (4.4)
Выражения (4.3) и (4.4) позволяют осуществить переход при определении
перемещений узлов стержня в местной системе координат к перемещениям в
общей системе и наоборот.
Аналогично составим выражения узловых сил по концам стержня в
местной и общей системах координат:
= ;
=
и зависимости, с помощью которых осуществляется их взаимное
преобразование, аналогичное (4.3) и (4.4), т.е.
= ; = . (4.5)
Составим уравнение равновесия стержня НК в местной системе координат
при узловой нагрузке:
= . (4.6)
Это равенство получено из канонических уравнений метода перемещений,
в которых вектор узловых нагрузок будет равен вектору узловых реакций в
связях метода перемещений , т.е. = - .
61

Матрица = - матрица реакций или матрица жесткости
стержня, которую обозначим = . Каждый ее элемент представляет собой
реакцию, возникающую по направлению одной из связей при единичном
перемещении другой связи. Для рассматриваемого стержня НК это будут связи,
приведенные на рис. 4.4, а), а за соответствующие им положительные
направления перемещений примем направления, указанные на рис. 4.4, б).
Составим матрицу жесткости такого конечного элемента, используя
значения концевых реактивных усилий метода перемещений и учитывая
продольную деформацию стержня (рис. 4.5, а), т.е.
= (4.7)
62

E J ; E F
l
Í Ê
a )
1 4
6 3 2 5
E J ; E F
2 5 6
4 1
3
l l
Í Ê
E J ; E F
Ð è ñ . 4 . 4
Í Ê
1
2
3
4 5
6
a ) á )
2 5
3
4
1
l
Í Ê
E J ; E F
á ) Ð è ñ . 4 . 5
E J ; E F
l
Í Ê
â )
1 4
5 3
2
63

Матрица состоит из коэффициентов жесткости элемента « ». Каждый
коэффициент жесткости представляет собой силу, возникающую в узле «Н»
или «К» по одному из направлений (1, 2, 3) или (4, 5, 6), когда перемещения по
одному из направлений равно единице, а все остальные перемещения равны
нулю.
Аналогично составим матрицу жесткости для других видов
стержневых конечных элементов:
для стержня с левым шарнирным и правым жестко защемленным опорными
закреплениями (рис. 4.5, б);
= (4.8)
для стержня с правым шарнирным и левым жестко защемленным опорными
закреплениями (рис. 4.5, в).
= (4.9)
С учетом полученных выражений основное уравнение изгиба стержневого
конечного элемента в местной системе координат по аналогии с (4.6) будет:
64

= . (4.10)
Умножая обе части уравнения (4.10) на и используя выражения (4.3), (4.4),
(4.5), получим = .
С учетом единичной матрицы уравнение изгиба стержневого конечного
элемента в общей системе координат будет:
= , (4.11)
где = – матрица жесткости конечного элемента стержня в
общей системе координат.
Полученные выражения можно использовать также для расчета
многопролетных статически неопределимых балок. В балочных конечных
элементах при нагрузках, перпендикулярных к оси стержня, будут
отсутствовать продольные силы и соответствующие им деформации и
перемещения. Поэтому основные выражения, полученные для общего случая
изгиба конечного элемента стержня, существенно упрощаются. В частности,
векторы перемещений концов балочного конечного элемента в общей (4.1) и
местной (4.2) системах координат (рис.4.3), соответственно, будут:
= ; = (4.12)
Зависимость между этими векторами в различных системах координат для
начального узла «Н» имеет вид:
= = ,
где = – единичная матрица второго порядка. Для всего стержня ij
по аналогии с (4.3), (4.4) получим :
= = , = Т = , (4.13)
где - единичная квадратная матрица четвертого порядка.
Матрицы жесткости балочных конечных элементов могут быть получены
из общих матриц жесткости (4.7), (4.8), (4.9) без учета влияния продольных
деформаций стержней:
– для стержня с жестко защемленными по концам опорами
65

= ; (4.7/)
– для стержня с шарниром в начальном сечении
= ; (4.8/)
– для стержня с шарниром в конечном сечении
= . (4.9/)
В шарнирно-стержневых системах конечным элементом является стержень
с шарнирами по концам, который испытывает только продольные деформации.
Поэтому вектор перемещений концов стержня в местной системе координат
(Н) (см. рис.4.3) будет:
= , (4.13)
где uH и uk – линейные перемещения узлов Н, К стержня в местной системе
координат.
Вектор перемещений концов стержня в общей системе координат (ХОУ)
(рис.4.3)
= = , (4.14)
66

где - горизонтальные и вертикальные перемещения узлов ij стержня
в общей системе координат. Составим зависимости между перемещениями
узлов стержня в различных системах координат:
uн = хi cos + yi sin,
uk = хj cos + yj sin,
и векторами и , которые по аналогии с (4.3), (4.4) будут
= ; = Т ,
где = . (4.15)
Уменьшение количества перемещений в векторах и по сравнению с
общим случаем изгиба стержня приводит к значительным снижениям порядка
матриц и векторов в основных соотношениях и упрощению решения. В
частности матрица в местной системе координат будет:
= , (4.16)
в общей системе координат = она с учетом (4.15) примет
следующий вид:
= . (4.17)
Вектор узловых нагрузок:
= . (4.18)
В местной системе координат для уравнения (4.6) можно выразить из
условия их равенства концевым усилиям при действии местных пролетных
нагрузок на стержневые конечные элементы при различных условиях опирания.
В соответствии с принятым положительным направлением концевых усилий
(рис.4.2) вектор = будет для стержневого конечного
элемента с жестко защемленными по концам опорными закреплениями
67

(рис.4.5, а) при действии равномерно-распределенной нагрузки
интенсивностью q по всей его длине
= , (4.19)
при действии сосредоточенной силы Р в середине пролета конечного элемента:
= . (4.20)
Для стержневого конечного элемента с левым шарнирным и правым,
жестко защемленным опорными закреплениями (рис.4.5, б) при действии
равномерно-распределенной нагрузки интенсивностью q по всей его длине
= , (4.21)
при действии сосредоточенной силы Р в середине пролета конечного элемента
= . (4.22)
Аналогично для стержневого конечного элемента с левым, жестко
защемленным и правым шарнирным опираниями (рис.4.5, в) при действии
нагрузки интенсивностью q по всей длине
= , (4.23)
при действии сосредоточенной силы Р в середине пролета
= . (4.24)
Вектор узловых нагрузок конечного элемента = в общей
системе координат может быть сформирован из вектора в соответствии с
преобразованиями (4.5), т.е. = .
4.2. Матрица жесткости стержневой системы
68
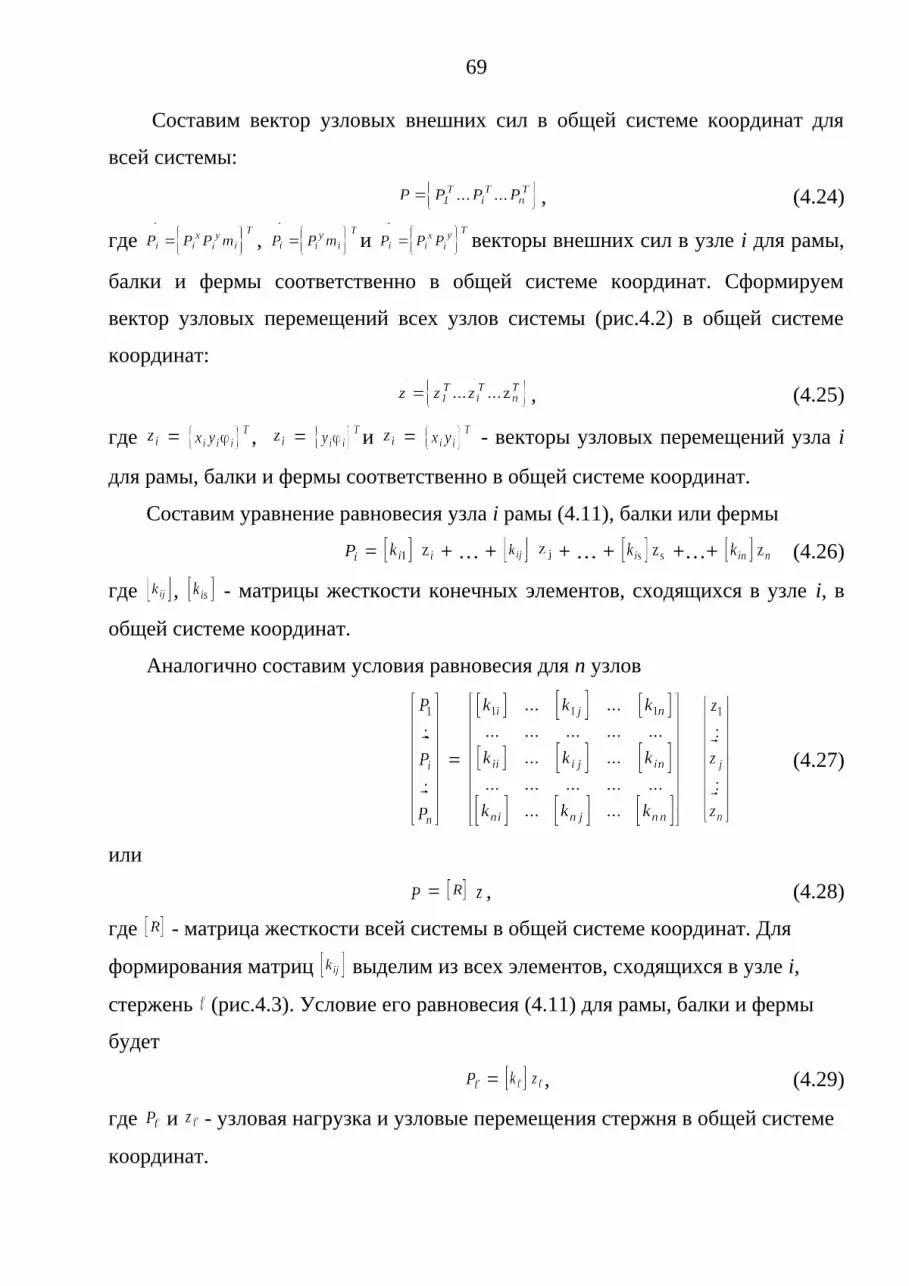
Составим вектор узловых внешних сил в общей системе координат для
всей системы:
, (4.24)
где , и векторы внешних сил в узле i для рамы,
балки и фермы соответственно в общей системе координат. Сформируем
вектор узловых перемещений всех узлов системы (рис.4.2) в общей системе
координат:
, (4.25)
где = , = и = - векторы узловых перемещений узла i
для рамы, балки и фермы соответственно в общей системе координат.
Составим уравнение равновесия узла i рамы (4.11), балки или фермы
= + … + + … + +…+ (4.26)
где , - матрицы жесткости конечных элементов, сходящихся в узле i, в
общей системе координат.
Аналогично составим условия равновесия для n узлов
= (4.27)
или
= , (4.28)
где - матрица жесткости всей системы в общей системе координат. Для
формирования матриц выделим из всех элементов, сходящихся в узле i,
стержень (рис.4.3). Условие его равновесия (4.11) для рамы, балки и фермы
будет
= , (4.29)
где и - узловая нагрузка и узловые перемещения стержня в общей системе
координат.
69

Тогда (4.6) будет:
= . (4.30)
Из этого выражения составим вектор сил, действующих на
рассматриваемый элемент в узле i :
= . (4.31)
Рассмотрим все стержни, сходящиеся в узле i . Из условия равновесия узла
получим , где суммирование распространяется на все стержни в узле i .
Подставляя в это условие (4.31), получим:
= . (4.32)
Сравнивая полученное выражение с (4.26), видим, что в (4.32) не входят
узлы, не связанные стержнями с узлом i . Поэтому соответствующие
подматрицы являются нулевыми. Если узел i связан с узлом j одним
стержнем, то множителем при будет сумма подматриц , то есть .
Множитель при , являющийся диагональным подматрицы , равен ,
где суммируются все элементы в узле i. Решая уравнение (4.28), определяем
вектор узловых перемещений (4.25) в общей системе координат.
Выразим концевые реактивные усилия в местной системе координат для
каждого конечного элемента по аналогии с (4.3):
= = , (4.33)
где = , = и = - векторы концевых
реактивных усилий элемента для рамы, балки и фермы соответственно в
местной системе координат; = , =
или = - векторы перемещений узлов элемента для рамы, балки и
фермы соответственно в общей системе координат. Учитывая действие
внешней узловой нагрузки (4.18), вызванной местной пролетной нагрузкой,
концевые реактивные усилия в местной системе координат для рам и балок
выразятся как: . (4.34)
70
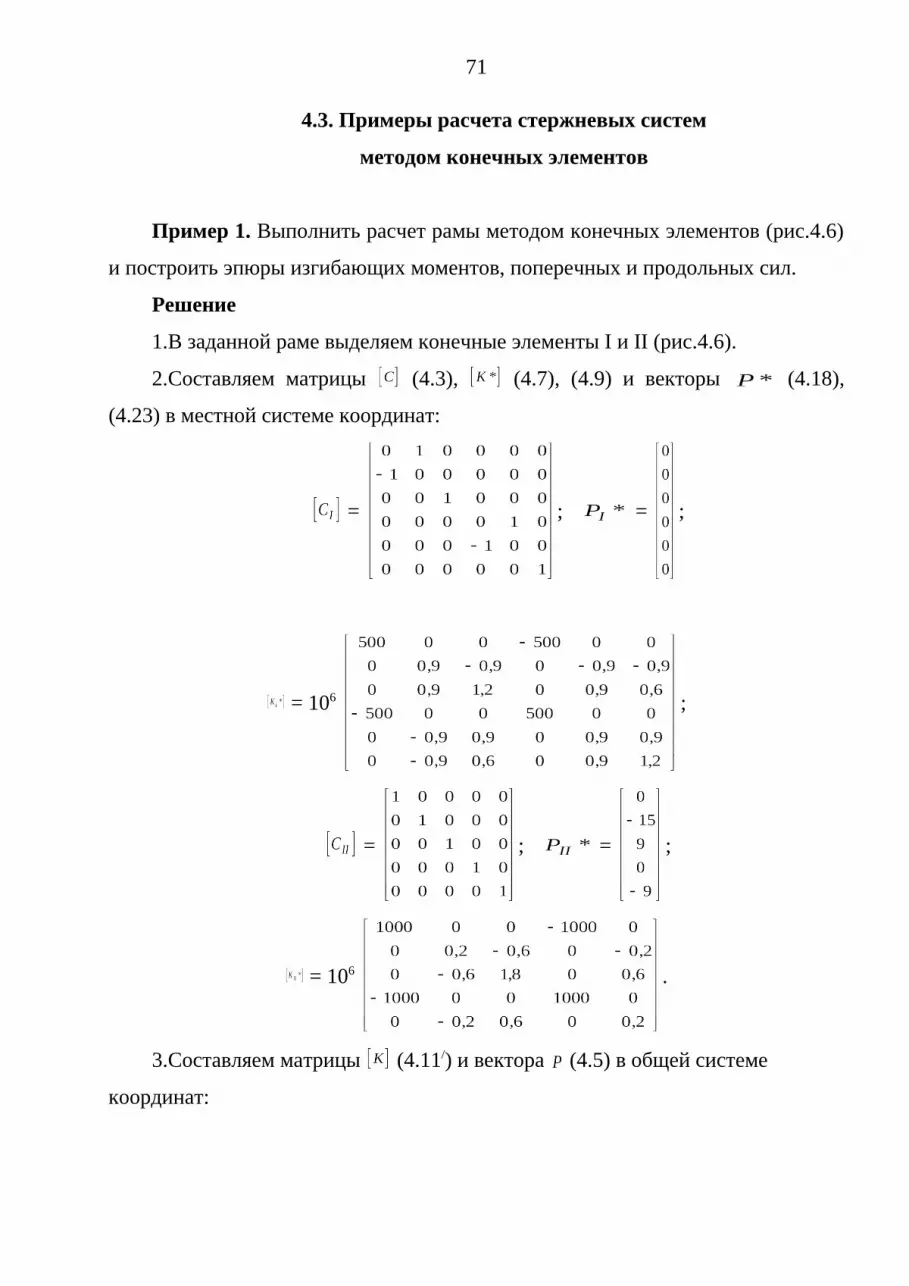
4.3. Примеры расчета стержневых систем
методом конечных элементов
Пример 1. Выполнить расчет рамы методом конечных элементов (рис.4.6)
и построить эпюры изгибающих моментов, поперечных и продольных сил.
Решение
1.В заданной раме выделяем конечные элементы I и II (рис.4.6).
2.Составляем матрицы (4.3), (4.7), (4.9) и векторы (4.18),
(4.23) в местной системе координат:
= ; = ;
= 106 ;
= ; = ;
= 106 .
3.Составляем матрицы (4.11/) и вектора (4.5) в общей системе
координат:
71

= 106 ; = ;
= 106 ; = .
4.Составляем матрицу жесткости всей системы (4.27) и вектор узловых
внешних сил в общей системе координат:
= 106
=
72

Ð è ñ . 4 . 6
3 ì
q = 8 ê Í / ì
3 E F ; 3 E I
E F = 1 0 9 ê Í E I = 0 , 6 · 1 0 6 ê Í ì 2 2
ì
q = 8 ê Í / ì
F I = 9 0 0
F I I = 0 0 j 2
x 2
y 2
x 1
x
y
2
y 1 j 1
1
I I
I
y 3
x 3
3
q = 8 ê Í / ì
M P
3 , 5 9 2
5 , 4 0 8
1 , 7
+ -
- Q P
- 2 , 6 9 4
1 3 , 1 9 7
- 1 0 , 8 0 3
q = 8 ê Í / ì
- N P
- 1 3 , 1 9 5
- 2 , 6 9
-
2 , 6 9 4 x
y
2 , 6 9 3
M P
1 0 , 8 0 3
q = 8 ê Í / ì
1 3 , 1 9 5
1 , 7
Ð è ñ . 4 . 7
73

5.Сокращаем порядок матрицы и вектора , учитывая количество и вид
опорных связей. Перемещения в узлах 1 и 3 по направлению опорных связей
отсутствуют, т.е. х1 = у1 = 1 = х3 = у3 = 0. Поэтому в матрице
соответствующие этим перемещениям подматрицы не учитываются. Система
уравнений примет следующий вид:
106 = .
6.Решаем систему уравнений х2 = 0,00269410-6 ; у2 = - 0,00263910-6 ; 2 =
= - 2,995510-6 .
Получаем вектор узловых перемещений узлов рамы в общей системе
координат (4.2)
= =
= .
7.Определяем концевые реактивные усилия (4.10) и (4.11) в
местной системе координат:
= ; = ; = ; = .
8.Строим эпюры изгибающих моментов Мр поперечных Qр и продольных
Nр сил в заданной раме от нагрузки (рис.4.7).
9.Выполняем статическую проверку (рис.4.7)
х = 0; 2,694 – 2,694 = 0,
у = 0; 13,195 – 8,3 + 10,803 = 0,
М3 = 0; 1,7 + 13,195 – 2,6942 - 831,5 = 0.
Пример 2. Выполнить расчет фермы (рис.4.8) методом конечных
элементов и определить продольные силы в ее стержнях.
Решение
74

1.В заданной ферме выделяем конечные элементы I, II, III, IV, V, VI, VII
(рис.4.9).
2.Составляем матрицы (4.17) и векторы (4.24) в общей системе
координат:
= ; = ;
= ;
= ;
= ;
= ;
=
= .
3.Составляем матрицу жесткости всей системы (4.27):
=
75

.
4.Сокращаем порядок матрицы и вектора .
Перемещения в узлах 1, 2, 3 по направлению опорных связей отсутствуют,
т.е. х1 = у1 = у2 = у3 = 0. Поэтому в матрице и векторе соответствующие
этим перемещениям подматрицы и элементы не учитываются. Матрица и
вектор преобразуются к следующему виду:
= ;
= .
5.Решаем систему уравнений (4.28):
76

E F E F E F E F = 1 0 7 ê Í
2 E F
2 E F 2 E F
4 ì 4 ì 4 ì 4 ì
3 ì
Ð è ñ . 4 . 8
P 1 = 2 0 ê Í P 2 = 4 0 ê Í P 3 = 1 0 ê Í
V I I
Ð è ñ . 4 . 9
Ð è ñ . 4 . 1 0
P 1 = 2 0 ê Í P 2 = 4 0 ê Í P 3 = 1 0 ê Í
y 1
x 1
1
y 4
x 4
4
y 2
x 2
2
y 5
x 5
5
y 3
x 3
3
I I I I V V V I
I I I
F I I I F I V
F V F V I x
y
V 1 = 4 , 8 6 7 ê Í R 3 = 1 8 , 6 1 7 ê Í R 2 = 3 6 , 5 1 5 8 ê Í
Í 1 = 1 0 ê Í
+ +
+ 3 , 6 8 7 8
1 6 , 4 9 0 2 4 , 8 2 3
- + - -
х2 = 0,6595810-5; х3 = 1,6524910-5; х4 = 0,8644710-5;
77

у4 = - 1,82860710-5; х5 = 1,0119810-5; у5 = - 3,4397210-5.
Получаем вектор узловых перемещений узлов фермы в общей системе
координат (4.25):
= =
=
.
6.Определяем концевые реактивные усилия (4.33) в местной системе
координат:
= ; = ; = ; = ;
= ; = ; = .
7.Строим эпюру продольных сил Nр в заданной ферме от нагрузки
(рис.4.10).
8.Определяем опорные реакции и выполняем статическую проверку
(рис.4.10:
узел 1. у = 0; V1 - NIIIsinIII = 0; V1 = 4,8671 кН;
х = 0; - Н1 + 16,49 - NIV соsII = 0; Н1 = 10 кН;
узел 2. у = 0; R2 – (NIV + NV)sinIV = 0; R2 = 36,5158 кН;
узел 3. у = 0; R3 – NVI sinVI = 0; R3 = 18,6171 кН
х = 0; - 10 + 10 = 0;
у = 0; 4,8671 + 36,5158 + 18,6171 – 40 – 20 = 0.
Пример 3. Выполнить расчет неразрезной балки постоянной жесткости
EJ = 2106 кНм2 (рис.4.11) и построить эпюры прогибов, изгибающих моментов
и поперечных сил от заданных нагрузок.
Решение
1.Заданную балку разбиваем n = 7 узлами на n - 1 = 6 конечных элементов
одинаковой длины = 1,5 м (рис.4.11).
78

2.Составляем матрицы жесткости конечных элементов балки (4.7) в
местной и общей системах координат (4.11/):
= = 106 .
3.Составляем векторы узловых нагрузок (4.19) в местной и общей
(4.5) системах координат
= = = .
Аналогично = = .
4.Составляем матрицу жесткости всей системы (4.27) и вектор узловых
внешних сил (4.24) в общей системе координат (табл. 4.1). Учитывая
отсутствие вертикальных перемещений в узлах 1, 4 и 6, сокращаем порядок
матрицы , векторов и (табл. 4.2).
5.Решаем систему уравнений (4.28) и получаем вектор узловых
перемещений балки в общей системе координат (4.25):
= 10-5
79

1 , 5 ì 1 , 5 ì 1 , 5 ì 1 , 5 ì 3 ì
q = 2 0 ê Í / ì P 2 = 4 0 ê Í P 1 = 8 0 ê Í Ì = 1 0 ê Í · ì
L = 9 , 0 ì
1 , 5 ì 1 , 5 ì 1 , 5 ì 1 , 5 ì
4 0 ê Í Ì = 1 0 ê Í · ì
L = 9 , 0 ì
9 5 ê Í
1 , 5 ì l = 1 , 5 ì
1 5 ê Í 3 0 ê Í
3 , 7 5 ê Í · ì 3 , 7 5 ê Í · ì
1 2 3 4 5 6 7 1 2 3 4 5 6
x
y
Ð è ñ . 4 . 1 1
+
-
+
+
-
Ð è ñ . 4 . 1 2
0 , 0 - 0 , 0 6 4 1 - 0 , 0 6 3 4 0 , 0 0 , 0 3 0 5
- 0 , 8 4 8 0
6 1 , 3 3 3 7 7 , 6 6 7
- 4 8 , 5 0 - 5 9 , 2 5
- 4 9 , 2 5 - 6 0
5 5 , 8 8 9
2 5 , 8 8 9
- 4 , 1 1 1
- 8 4 , 1 1 1
- 7 , 1 6 7 - 7 , 1 6 7
4 0 , 0
Ý ï þ ð à Q ð ( ê Í )
Ý ï þ ð à Ì ð ( ê Í ì )
Ý ï þ ð à ï ð î ã è á î â ó ( ì ì )
80
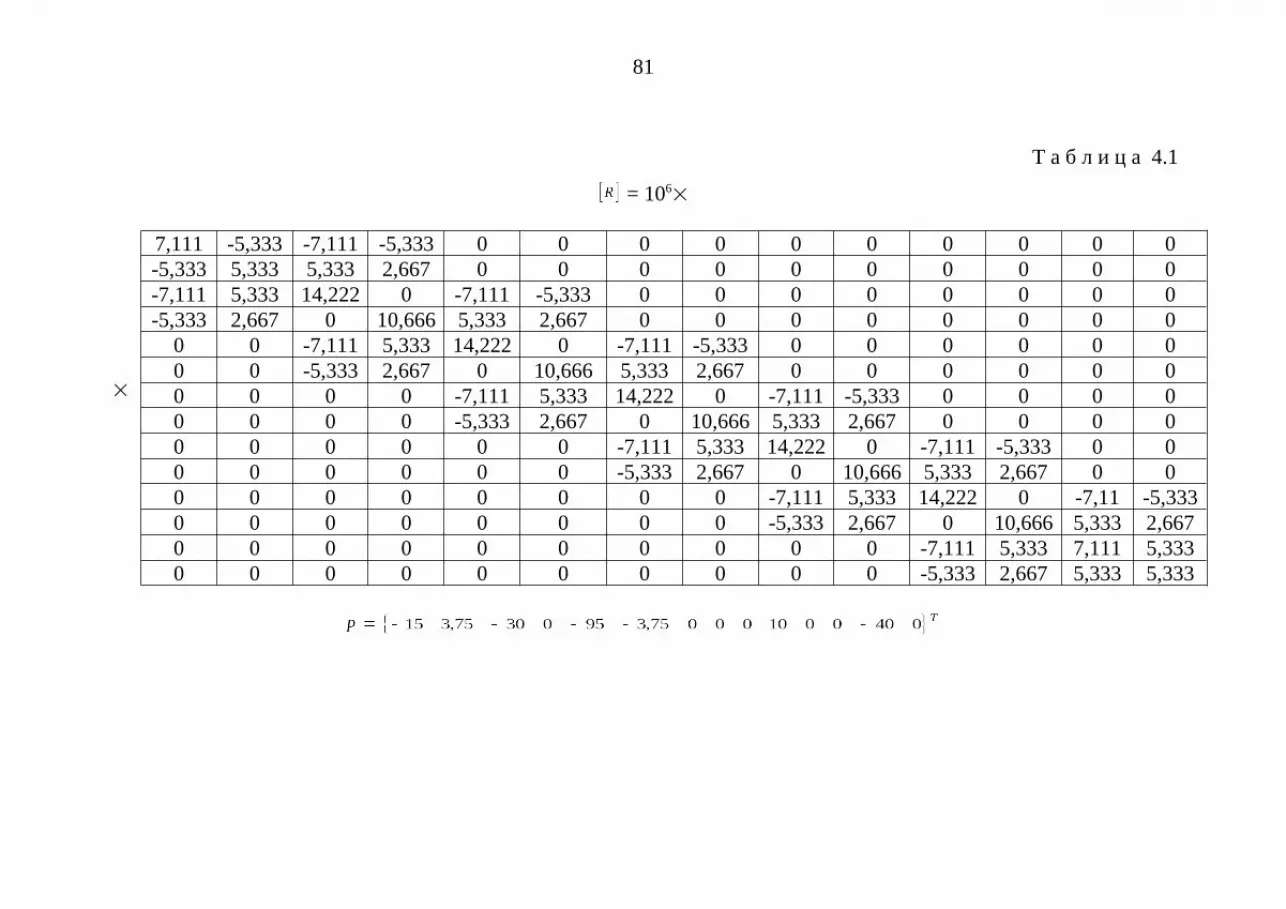
Т а б л и ц а 4.1
= 106
7,111 -5,333 -7,111 -5,333 0 0 0 0 0 0 0 0 0 0-5,333 5,333 5,333 2,667 0 0 0 0 0 0 0 0 0 0-7,111 5,333 14,222 0 -7,111 -5,333 0 0 0 0 0 0 0 0-5,333 2,667 0 10,666 5,333 2,667 0 0 0 0 0 0 0 0
0 0 -7,111 5,333 14,222 0 -7,111 -5,333 0 0 0 0 0 00 0 -5,333 2,667 0 10,666 5,333 2,667 0 0 0 0 0 00 0 0 0 -7,111 5,333 14,222 0 -7,111 -5,333 0 0 0 00 0 0 0 -5,333 2,667 0 10,666 5,333 2,667 0 0 0 00 0 0 0 0 0 -7,111 5,333 14,222 0 -7,111 -5,333 0 00 0 0 0 0 0 -5,333 2,667 0 10,666 5,333 2,667 0 00 0 0 0 0 0 0 0 -7,111 5,333 14,222 0 -7,11 -5,3330 0 0 0 0 0 0 0 -5,333 2,667 0 10,666 5,333 2,6670 0 0 0 0 0 0 0 0 0 -7,111 5,333 7,111 5,3330 0 0 0 0 0 0 0 0 0 -5,333 2,667 5,333 5,333
=
81

Т а б л и ц а 4.2
=106
5,333 5,333 2,667 0 0 0 0 0 0 0 05,333 14,222 0 -7,111 -5,333 0 0 0 0 0 02,667 0 10,666 5,333 2,667 0 0 0 0 0 0
0 -7,111 5,333 14,222 0 -5,333 0 0 0 0 00 -5,333 2,667 0 10,666 2,667 0 0 0 0 00 0 0 -5,333 2,667 10,666 5,333 2,667 0 0 00 0 0 0 0 5,333 14,222 0 -5,333 0 00 0 0 0 0 2,667 0 10,666 2,667 0 00 0 0 0 0 0 -5,333 2,667 10,666 5,333 2,6670 0 0 0 0 0 0 0 -5,333 7,111 5,3330 0 0 0 0 0 0 0 2,667 5,333 5,333
= , =
82

6.Определяем концевые реактивные усилия (4.34) для каждого
конечного элемента
= ; = ; = ;
= ; = ; = .
7.Строим эпюры прогибов у, изгибающих моментов Мр и поперечных сил
Qр в заданной балке от нагрузки (рис.4.12).
8.Выполняем проверку: У = 0; 55,889 - 203 – 80 + 76,944 + 47,167 – 40=0
М5 = 0; 55,8896 - 2034,5 - 803 + 76,9441,5 + 10 – 47,1671,5 + 403
= 0.
83

Список литературы
1. Киселев, В.А. Строительная механика [Текст]/В.А. Киселев. – М.:
Стройиздат, 1986. – 520 с.
2. Строительная механика [Текст]/ А.Ф. Смирнов, А.В. Александров,
Б.Я. Лащенников, Н.Н. Шапошников. – М.: Стройиздат, 1981. – 511 с.
3. Дарков, А.В. Строительная механика [Текст]/ А.В. Дарков, Н.Н.
Шапошников. – М.: Высшая школа, 1986.– 607 с.
4. Руководство к практическим занятиям по курсу строительной механики
[Текст]/Под ред. Г.К. Клейна. – М.: Высшая школа, 1973. – 360 с.
5. Строительная механика в примерах и задачах [Текст]/ Под ред. В.А.
Киселева.– М.: Стройиздат, 1968. – 386 с.
6. Леонтьев, Н.Н. Основы строительной механики стержневых систем
[Текст]/ Н.Н. Леонтьев, Д.Н. Соболев, А.А. Амосов. – М.: изд-во АСВ,
1996. – 542 с.
7. Анохин, Н.Н. Строительная механика в примерах и задачах [Текст]/
Н.Н. Анохин. – Ч. II. Статически неопределимые системы. – 1999.
8. Розин, Л.А. Стержневые системы как системы конечных элементов
[Текст]/ Л.А. Розин. – Л.: изд-во ЛГУ, 1976. – 232 с.
9. Розин, Л.А. Метод конечных элементов в применении к упругим
системам [Текст]/ Л.А. Розин. – М.: Стройиздат, 1977. – 128 с.
10.Метод конечных элементов [Текст]/П.М. Варвак, И.М. Бузин, А.С.
Городецкий, В.Г. Пискунов и др. – Киев: Вища школа, 1981. – 176 с.
84

Содержание
ВВЕДЕНИЕ...................................................................................................................31. ОСНОВНЫЕ ТЕОРЕМЫ СТРОИТЕЛЬНОЙ МЕХАНИКИ................................41.1. Понятие о действительной и возможной работе................................................41.2. Теорема о взаимности возможных работ (теорема Бетти)................................51.3. Теорема о взаимности удельных перемещений.................................................6(теорема Максвелла)....................................................................................................61.4. Теорема о взаимности удельных реакций 7(Первая теорема Рэлея)................................................................................................71.5. Теорема о взаимности удельных реакций и удельных перемещений (вторая теорема Рэлея)..............................................................................................................82. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ СИСТЕМ................................10МЕТОДОМ СИЛ........................................................................................................102.1. Определение степени статической неопределимости.....................................102.2. Основная система метода сил............................................................................122.3. Канонические уравнения метода сил................................................................152.4. Построение эпюр усилий в заданной системе..................................................172.5. Примеры расчета статически неопределимых рам методом сил...................202.6. Задание для выполнения расчетно-графической работы № 2 «Расчет плоской статически неопределимой рамы методом сил от нагрузки».................383. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ РАМ МЕТОДОМ ПЕРЕМЕЩЕНИЙ …………………………………………………………………433.1. Выбор основной системы метода перемещений..............................................433.2. Напряженно деформированное состояние основной системы.......................453.4. Определение коэффициентов исвободных членов канонических уравнений...........................................................513.5. Определение неизвестных перемещений.........................................................513.6. Построение эпюры изгибающих моментов в...................................................52заданной раме от заданной нагрузки........................................................................523.7. Примеры расчета рам..........................................................................................524. РАСЧЕТ СТЕРЖНЕВЫХ СИСТЕМ МЕТОДОМ...............................................55КОНЕЧНЫХ ЭЛЕМЕНТОВ.....................................................................................554.1. Матрица жесткости стержневого конечного элемента………………………584.2. Матрица жесткости стержневой системы.........................................................684.3. Примеры расчета стержневых систем...............................................................71методом конечных элементов...................................................................................71Список литературы....................................................................................................84
85
Борис Борисович Лампси
Владимир Порфирьевич Гущин
Николай Васильевич Стопкин
Надежда Юрьевна Трянина
Владимир Иванович Пашкевич
СТРОИТЕЛЬНАЯ МЕХАНИКА
Часть II. Статически неопределимые системы
Учебное пособие
Редактор
Подписано в печать Формат 60×90 1/16. Бумага газетная. Печать трафаретная. Уч.-изд. л. Усл. печ. л.
Тираж экз. Заказ №_____
Государственное образовательное учреждение высшего профессионального образования
«Нижегородский государственный архитектурно-строительный университет», 603950, Н.Новгород, Ильинская, 65
Полиграфцентр ННГАСУ, 603950, Н.Новгород, Ильинская, 65
86





























