Embed Size (px)
Citation preview
1
Stochastic inversion of seismic PP and PS data for reservoir parameter 1
estimation 2
Jinsong Chen1, and Michael E. Glinsky2 3
4
Right Running Head: Stochastic inversion of PP and PS data 5
6
1Lawrence Berkeley National Laboratory, Earth Sciences Division, Berkeley, California 7
E-mail: [email protected] 8
9
2ION Geophysical, Houston, Texas 10
E-mail: [email protected] 11
12
13
2
ABSTRACT 1
We investigate the value of isotropic seismic converted-wave (i.e., PS) data for reservoir 2
parameter estimation using stochastic approaches based on a floating-grain rock physics 3
model. We first perform statistical analysis on a simple two-layer model built on actual 4
borehole logs and compare the relative value of PS data versus AVO gradient data for 5
estimating floating-grain fraction. We find that PS data are significantly more informative 6
than AVO gradient data in terms of likelihood functions, and the combination of PS and 7
AVO gradient data together with PP data provides the maximal value for the reservoir 8
parameter estimation. To evaluate the value of PS data under complex situations, we 9
develop a hierarchical Bayesian model to combine seismic PP and PS data and their 10
associated time registration. We extend a model-based Bayesian method developed 11
previously for inverting seismic PP data only, by including PS responses and time 12
registration as additional data and PS traveltime and reflectivity as additional variables. 13
We apply the method to a synthetic six-layer model that closely mimics real field 14
scenarios. The case study results show that PS data provide more information than AVO 15
gradient data for estimating floating-grain fraction, porosity, net-to-gross, and layer 16
thicknesses when their corresponding priors are weak. 17
18

3
INTRODUCTION 1
Multicomponent seismic surveying has been used for hydrocarbon exploration for 2
decades because it can capture the seismic wave-field more completely than conventional 3
single-element techniques (Stewart et al., 2002). Although several types of energy 4
conversion may occur when seismic waves pass through the underlying earth, transmitted 5
or multiple conversions generally have much lower amplitudes than the P-down and S-up 6
reflection (Rodriguez-Saurez, 2000). Consequently, among many applications of multi-7
component seismic data, the use of converted-wave or PS images receives much more 8
attention (Stewart et al., 2002; Mahmoudian and Margrave, 2004; Veire and Landro, 9
2006). However, the high acquisition cost of collecting multicomponent seismic data 10
compared to conventional seismic surveys and the challenge in processing 11
multicomponent data, makes the use of converted-wave data as a routine practice 12
difficult. 13
The interest in using multicomponent seismic data again for hydrocarbon 14
applications is inspired by recent advances in seismic data acquisition technologies, such 15
as ocean-bottom seismometer techniques (e.g., ocean-based cables and ocean-based 16
nodes) (Hardage et al., 2011; Pacal, 2012). With the use of new techniques, 17
multicomponent seismic data can be collected more reliably compared to conventional 18
seismic survey techniques. Another major reason for using multicomponent seismic data 19
is the need to estimate spatially-distributed ductile fraction (Glinsky et al., 2013), and to 20
characterize fractures for unconventional resources because shear-wave splitting provides 21
an effective approach to image fracture orientation and density (Bale et al., 2013). There 22
are many other successful applications of converted-wave data, such as time-lapse 23

4
monitoring of geomechanical changes (Davis et al., 2013), and reservoir characterization 1
(Brettwood et al., 2013). 2
In this study, we use stochastic approaches to investigate the value of converted-3
wave data for reservoir parameter estimation based on a floating-grain rock physics 4
model developed by DeMartini and Glinsky (2006). The model is well-documented in 5
Gunning and Glinsky (2007) and appropriate for porous sedimentary rocks in which 6
some solid materials are “floating” or not involved in loading support because it can 7
explain the observed variation in P-wave velocity versus density trends and the lack of 8
variation in the P-wave velocity versus S-wave velocity trends. The rock physics 9
relationship can be modified and applied to unconventional shale resource exploration as 10
done by Glinsky et al. (2013), where the media is considered as a binary mixing of brittle 11
and ductile materials and the ductile fraction plays the same role as the floating-grain 12
fraction in this model. 13
We employ stochastic methods in the study because they have many advantages 14
over traditional deterministic approaches in reservoir parameter estimation using multiple 15
geophysical data sets, especially when we deal with complex issues involving uncertainty 16
(Chen et al., 2008). We start from analyzing a simple two-layer model by comparing the 17
relative value of PS versus AVO gradient data for estimating floating-grain fraction 18
according to their likelihoods when both rock physics models and seismic data are 19
subject to uncertainty. We then focus on more complicated cases involving multiple 20
layers and develop a hierarchical Bayesian model to combine seismic PP and PS data and 21
their associated time registration. 22

5
We extend the model-based Bayesian method developed by Gunning and Glinsky 1
(2004) for inverting seismic PP data to allow isotropic converted-wave responses and PS 2
event time registration as additional data. We use the same rock physics models and 3
Markov chain Monte Carlo (MCMC) sampling strategies as Gunning and Glinsky (2004). 4
Since this study is built on the previous work, the subsequent descriptions will be focused 5
on the new development and applications; the details of other parts can be found in 6
Gunning and Glinsky (2004). 7
ROCK PHYSICS MODEL AND ANALYSIS OF TWO-LAYER MODELS 8
Floating-grain rock physics model 9
We use the floating-grain rock physics model developed by Demartini and Glinsky 10
(2006) and Gunning and Glinsky (2007) to link reservoir parameters to seismic attributes. 11
In the model, the subsurface is considered as a binary mixture of reservoir members (e.g., 12
sand) and non-reservoir members (e.g., shale). For sand, we assume that some solid 13
materials are “floating” in pore space and the seismic properties (i.e., seismic P- and S-14
wave velocity and density) can be characterized by two fundamental parameters: the 15
loading depth ( z ), which is a measure of effective pressure, and the floating-grain 16
fraction ( x ). The general model is given below 17
,p vp vp vp vpv a b z c x ε= + + + (1) 18
,s vs vs p vsv a b v ε= + + (2) 19
.pa b v c xρ ρ ρ ρρ ε= + + + (3) 20

6
In equations 1-3, pv , sv , and ρ are seismic P- and S-wave velocity and density, 1
respectively; vpa , vpb , vpc , vsa , vsb , ρa , ρb , and ρc are the fitting coefficients. Symbols 2
ε vp , εvs , and ρε represent uncertainty associated with the regression equations. We 3
assume that ε vp , εvs , and ρε have Gaussian distributions with zero mean and variance of 4
2σ vp , 2σ vs , and 2
ρσ , respectively. 5
We rewrite equations 2-3 in terms of loading depth z and floating-grain fraction x 6
as follows 7
( ) ( ),s vs vp vs vs vp vs vp vs vp vsv a a b b b z b c x b ε ε= + + + + + (4) 8
( ) ( ) ( ).vp vp vp vpa a b b b z b c c x bρ ρ ρ ρ ρ ρ ρρ ε ε= + + + + + + (5) 9
We can see that in the rock physics model, seismic properties linearly depend on the 10
reservoir parameters with uncertainty. 11
We can use different relationships for shale because seismic properties in shale do 12
not depend on floating-fraction. As it has been done in Gunning and Glinsky (2007), we 13
drop floating-grain fraction from equations 1 and 4 and use the power-law form of the 14
Gardner relationship (Gardner et al., 1974) for density, i.e., bpav ρρ ε= + , where a and b 15
are fitting coefficients. By fitting actual borehole logs from suitable field sites, we can 16
obtain all the needed coefficients and their associated standard errors for sand and shale 17
members. Table 1 is a summary of all those values. 18
Reflectivity coefficients 19

7
We use the linearized Zoeppritz approximations (Aki and Richard, 1980) for small 1
contrasts to obtain PP and PS reflectivity coefficients at an interface, which are given 2
below 3
2 2
2 2
1 1= 4 2 sin2 2
1 + sin tan ,2
p p spp sp p
p p s
pp p
p
v v vR rv v v
vv
ρ ρ θρ ρ
θ θ
⎛ ⎞ ⎡ ⎤Δ Δ ⎛ ⎞ΔΔ Δ+ + − +⎜ ⎟ ⎢ ⎥⎜ ⎟⎜ ⎟ ⎢ ⎥⎝ ⎠⎝ ⎠ ⎣ ⎦Δ
(6) 4
( )
( )
2 2
2 2
sin1 2 sin 2 cos cos
2cos2sin
+ sin cos cos .cos
pps sp p sp p s
s
p ssp p sp p s
s s
R r r
vr rv
θ ρθ θ θθ ρθ
θ θ θθ
Δ= − − +
Δ− (7) 5
In equations 6 and 7, 1 2( ) / 2p p pv v v= + , 1 2( ) / 2s s sv v v= + , 1 2( ) / 2ρ ρ ρ= + , /sp s pr v v= , 6
2 1p p pv v vΔ = − , 2 1s s sv v vΔ = − , and 2 1ρ ρ ρΔ = − , where ( 1pv , 1sv , 1ρ ) and ( 2pv , 2sv , 2ρ ) 7
are P-wave and S-wave velocity and density in the layers above and below the interface. 8
Symbols pθ and sθ are the P-wave and S-wave incident angles; they are connected 9
through Snell’s law as sin / sin /p p s sv vθ θ= . 10
Equation 6 is the same as the one used by Castagna et al. (1998), where the first 11
and second terms on the right side of the equation are referred to as AVO intercept and 12
gradient, respectively. The third term is high-order variations and dominated at far offsets 13
near the critical angle (Mavko et al., 1998). Equation 7 is the same as the one used by 14
Veire and Landro (2006). For ease of description, we let 0A be the AVO intercept, 1A be 15
all the terms on the right side of equation 7, and 2A be the AVO gradient with the high-16
order term. Let 17

8
( )
( )
2 21
2 22
sin1 2 sin 2 cos cos , and
2cos
2sinsin cos cos .
cos
psp p sp p s
s
psp p sp p s
s
g r r
g r r
θθ θ θ
θθ
θ θ θθ
⎧= − − +⎪
⎪⎨⎪ = −⎪⎩
(8) 1
We have the following relationship 2
0
1 1 22 2 2 2 2 2
2
1/ 2 1/ 2 0 /0 / .
2 sin sin (1 tan ) / 2 4 sin /p p
sp p p p sp p s s
AA g g v vA r r v v
ρ ρ
θ θ θ θ
⎛ ⎞ Δ⎛ ⎞ ⎛ ⎞⎜ ⎟⎜ ⎟ ⎜ ⎟= Δ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎜ ⎟ ⎜ ⎟⎜ ⎟− + − Δ⎝ ⎠ ⎝ ⎠⎝ ⎠
(9) 3
We use the capital letter A to represent the vector on the left side of equation 9 and use 4
aM and ΔC represent the matrix and the vector on the right side of the equation. Thus 5
equation 9 becomes a= ΔA M C. These notations will be used in the subsequent text. 6
Synthetic two-layer model 7
To demonstrate the value of PS data, we start from a simple two-layer model based 8
on actual borehole logs from Gunning and Glinsky (2007), with the first layer being shale 9
and the second layer being sand whose rock physics models are given in Table 1. Since 10
we focus on estimation of floating-grain fraction in the sand layer, we fix the loading 11
depth as 1 5,200z = m and 2 5,321z = m for the first and second layers. By using the 12
shale regression equations with coefficients given in Table 1, we have 1 3, 279pv = m/s, 13
1 1,596sv = m/s, and 1 2.50ρ = g/cc. By using equations 1, 4, and 5, we get 14
2 1( ) ( ) ( ),vp vp vp vpa a b b b z b c c x bρ ρ ρ ρ ρ ρ ρρ ρ ε εΔ = + + − + + + + (10) 15
2 1( ) ,p vp vp p vp vpv a b z v c x εΔ = + − + + (11) 16
2 1( ) ( ).s vs vp vs vp vs s vs vp vs vs vpv a a b b b z v b c x bε εΔ = + + − + + + (12) 17

9
Let 1
2 1
2 1
2 1
vp vp
vp vp vp p
vs vs vp vs vp vs s
w a a b b b zw a b z vw a a b b b z v
ρ ρ ρ ρ ρ⎧ = + + −⎪ = + −⎨⎪ = + + −⎩
(13) 2
We have 3
/ / ( ) / ( ) // / / / ./ / / ( ) /
vp vp
p p vp p vp p vp p
s s vs s vs vp s vs vs vp vs
w c b c bv v w v c v x vv v w v b c v b v
ρ ρ ρ ρ ρρ ρ ρ ρ ε ε ρε
ε ε
⎛ ⎞ ⎛ ⎞Δ + +⎛ ⎞ ⎛ ⎞⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟Δ = + +⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟
⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟Δ +⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
(14) 4
Let 0W , 1W , and wε represent the first, second, and third vectors on the right side of 5
equation 14; thus, we have 0 1 .wxΔ = + +C W W ε By assuming that the errors in equations 6
1-3 are independent, we can obtain the following covariance matrix wΣ 7
2 2 2 2 2 2
2 2 2 2
2 2 2 2 2 2
( ) / / ( ) / ( )/ ( ) / / ( ) ./ ( ) / ( ) ( ) /
vp vp p vs vp s
w vp p vp p vs vp p s
vs vp s vs vp p s vs vs vp vs
b b v b b vb v v b v vb b v b v v b v
ρ ρ ρ ρ
ρ
ρ
σ σ ρ σ ρ σ ρσ ρ σ σσ ρ σ σ σ
⎛ ⎞+⎜ ⎟∑ = ⎜ ⎟⎜ ⎟+⎝ ⎠
(15) 8
Synthetic seismic data and likelihood function 9
For the purpose of this analysis, we consider both PP and PS reflectivities at the 10
interface as data even if they often are unknown and estimated from full waveform 11
seismic responses in practice. Specifically, we use a PP trace with a zero incident angle 12
(i.e., 0A ), a PS trace with the P-wave incident angle of 45 degrees (i.e., 1A ), and an AVO 13
gradient trace (including the high-order term) with the P-wave incident angle of 45 14
degrees (i.e., 2A ). Let vector mR be the data with additive Gaussian random noise mε ; 15
we thus have 16
0 1( ) ( )m d m d a m d a m d a wx= + = Δ + = + + +R M A ε M M C ε M M W W ε M M ε , (16) 17

10
where dM is referred to as a data matrix that determines which types of data are used for 1
analysis (see Appendix A). 2
The second term on the right side of equation 16 is residuals; they include 3
measurement errors in seismic data and uncertainty caused by rock physics models. Since 4
both measurement errors and uncertainty in rock physics models are assumed to have 5
multivariate Gaussian distributions, their summation also has a multivariate Gaussian 6
distribution (Stone, 1995). Let mΣ be the covariance matrix of the measurement errors 7
and wΣ be the covariance matrix of the uncertainty in rock physics models. The 8
combined covariance thus is given by ( ) ( )Tc m d a w d a∑ = ∑ + ∑M M M M , where wΣ is 9
given by equation 15. Consequently, the likelihood function of x given data mR is a 10
multivariate Gaussian distribution as follows 11
{ }
1/2
10 1 0 1
( | )
exp ( ) ( ) .m c
Tm d a d a c m d a d a
f x
x x
−
−
∝ ∑
× − − − ∑ − −
R
R M M W M M W R M M W M M W (17) 12
Model comparison 13
We compare the estimation results obtained by using four combinations of seismic 14
data by specifying the data matrices: (1) using the PP data only, (2) using the PP and PS 15
data, (3) using the PP and AVO gradient data, and (4) using all the seismic data (see 16
Appendix A). Their corresponding data are represented by (1)mR , (2)
mR , (3)mR , and (4)
mR . To 17
avoid the effects of prior distribution on floating-grain fraction, we focus on the 18
likelihood functions ( )( | )kmf xR ( 1,2,3, and 4k = ) for those models. 19
Figure 1 compares the likelihood functions for the true floating-grain fraction being 20
0.0 (Figure 1a) and 0.035 (Figure 1b). The noise levels for all the data are equal to 0.01 in 21

11
the unit of reflection coefficients (RFC). As we expect, the true values have the 1
maximum likelihood in both cases. It is clear that the likelihoods of using the PP and 2
AVO gradient data are considerably larger than those of using the PP data only. The 3
likelihoods of using the PP and PS data are significantly larger than those of using the PP 4
and AVO gradient data. This suggests that the combination of the PP and PS data are 5
more informative for estimating floating-grain fraction than the combination of the PP 6
and AVO gradient data. When we use all the data, we get the largest likelihoods. This 7
implies that the PS and AVO gradient data might complement each other to some degree. 8
In addition, we can see that the clean sand (i.e., 0x = , see Figure 1a) overall has larger 9
likelihoods than the sand with floating grain (i.e., 0.035x = , see Figure 1b). 10
The above comparison may depend on noise levels in the seismic data. In practice, 11
PS and AVO gradient data typically have larger errors than PP data. To investigate the 12
effects of noise on the likelihood analysis, we vary noise levels in both PS and AVO 13
gradient data from 0.01 RFC to 0.1 RFC while still fixing the noise level of the PP data as 14
0.01 RFC. We first calculate the maximum likelihoods for each combination of seismic 15
data and then normalize the results by the values of using the PP data only to get the 16
following likelihood ratios 17
( )
(1)
max{ ( | )}.max{ ( | )}
km
km
f xrf x
= RR
(18) 18
Figure 2 shows the likelihood ratios for the true floating-grain fraction of 0.0 and 19
0.035. Generally, as the noise levels in the PS and AVO gradient data increase, the 20
likelihood ratios decrease and approach 1, the result of using the PP data only. 21
Additionally, the likelihood ratios of using the PP and PS data always have larger 22
likelihood ratios than those of using the PP and AVO gradient data; the likelihood ratios 23

12
of using all the data always have the largest values. This suggests that the combination of 1
PP and PS data is more informative than that of PP and AVO gradient data even under 2
large noise levels. 3
BAYESIAN MODEL FOR MULTIPLE LAYERS 4
Hierarchical Bayesian models 5
Although analysis of two-layer models allows us to understand the value of PS data 6
for floating-grain fraction estimation, it is marginal analysis of relative changes of 7
compaction and floating-grain fraction across an interface under simple conditions. In the 8
case of multiple layers, we need to develop a hierarchical Bayesian model to combine 9
seismic PP and PS data and their time registration. This model is an extension of the 10
model-based Bayesian method by Gunning and Glinsky (2004) with converted wave 11
responses and PS time registration as additional data and PS traveltime and reflectivity as 12
additional unknowns. 13
We consider effective seismic P-wave and S-wave velocity ( pv and sv ) and 14
density (ρ ), and seismic PP and PS reflectivity ( ppR and psR ) as unknowns. They are 15
functions of rock physics parameters through suitable rock physics models. We consider 16
PP traveltime ( ppt ) as a primary unknown; both layer thickness (d ) and PS traveltime (17
pst ) can be derived from the PP traveltime and associated effective seismic attributes. 18
The data used for inversion include seismic PP and PS full-waveforms ( ppS and psS ) and 19
PP and PS event registration time ( ppT and psT ). If available, we can also include other 20
types of information from nearby boreholes, such as depth constraints ( bD ). 21

13
Figure 3 shows all the unknowns, available data, and their relationships; the dashed 1
rectangle highlights our extension to the method by Gunning and Glinsky (2004). 2
Specifically, we add two unknowns related to converted wave (i.e., pst , and psR ) and 3
two types of new data sets (i.e., psT and psS ). Following the direct graphical model, we 4
have the following hierarchical Bayesian model: 5
( , , , , , , , , | , , , , )
( | , ) ( | , ) ( | )
( | ) ( | ) ( | , , )
( | , , ) ( | , ) ( | , , )
( , , | ) ( ) ( ).
pp ps p s pp ps pp ps pp ps b
pp pp pp ps ps ps pp pp
ps ps b pp p s
ps p s pp p ps pp p s
p s pp
ff f ff f ff f ff f f
α t t d v v ρ R R S S T T DS t R S t R T tT t D d R v v ρR v v ρ d t v t t v vv v ρ α α t
∝
×
×
×
(19) 6
Equation 19 defines a joint posterior probability distribution function of all 7
unknown parameters up to a normalizing constant. The first five terms on the right side of 8
the equation are the likelihood functions of available data, which link data to the 9
associated unknowns; other terms on the right side are the prior probability distributions, 10
which are derived from other sources of information, such as rock physics models. We 11
define all the likelihood functions and prior distributions in a similar way to the method 12
of Gunning and Glinsky (2004). In the following, we only describe the new development. 13
Equation 19 is a general Bayesian model for combining seismic PP and converted-14
wave data; we can simplify or vary the equation in different ways depending on specific 15
applications. For example, we can consider PP and PS reflectivities as functions of pv , 16
sv , and ρ , but ignore their associated uncertainties. We can also consider depth d as a 17
function of P-wave velocity and PP traveltime. Since in Bayesian statistics (Bernardo and 18
Smith, 2000), data affect unknowns only through likelihood functions, we can use some 19
14
statistics ( , )pp psQ S S of seismic data ppS and psS in the Bayesian model, for example, 1
the rotation and truncation of original seismic data through principal component analysis 2
(Venables and Ripley, 1999) or other methods. Consequently, we can have the following 3
Bayesian model 4
( , , , , , | , , , )
( | , , , , ) ( | ) ( | )
( | , , ) ( , , | ) ( ) ( ).
pp ps p s pp ps pp ps
pp ps p s pp pp ps ps
ps pp p s p s pp
ff f ff f f f
∝
×
α t t v v ρ S S T TQ t t v v ρ T t T tt t v v v v ρ α α t
(20) 5
Likelihood function of seismic data 6
We describe a general form of the likelihood function in terms of statistics of 7
seismic data, with the likelihood function of original seismic data as a special case of the 8
form. Let ( , , , , )pp ps p sG t t v v ρ be the response vector of a suitable forward model that 9
links seismic statistics Q to unknowns. Let vector mε represent the residuals. We assume 10
that the residuals have the multivariate Gaussian distribution with zero mean and the 11
covariance matrix of mΣ ; thus, we have 12
( ) ( )
1/2/2
1
( | , , , , ) (2 )
1 exp ( , , , , ( , , , ,2
kpp ps p s m
T
pp ps p s m pp ps p s
f π −−
−
= Σ
⎛ ⎞× − − Σ −⎜ ⎟⎝ ⎠
Q t t v v ρ
Q G t t v v ρ Q G t t v v ρ . (21) 13
In equation 21, k is the dimension of the multivariate Gaussian distribution and mΣ is 14
the determinant of the covariance matrix mΣ . One of the main advantages of using 15
statistics in equation 21 is that we can have more options in defining likelihood functions 16
so that we can make their residuals uncorrelated. 17
Likelihood functions of PP and PS event time registration 18

15
The use of event time registration as data is one of the main advantages of the 1
method by Gunning and Glinsky (2004), as well as the current extension, because PP 2
event time is directly related to P-wave velocity and PS event time directly related to P-3
wave and S-wave velocity. They provide additional information to constrain the estimates 4
of P-wave and S-wave velocity beyond the reflectivity-based PP and PS full-waveforms. 5
Traditional methods for joint inversion of PP and PS data are primarily based on 6
the mapping of PS data to PP time (or domain conversion), in which PS data are 7
considered as additional seismic stacks. Although this approach is simple to implement, it 8
suffers from difficulties, such as wavelet distortion (Bansal and Matheney, 2010), 9
because the conversion of PS time to PP time needs interval seismic P-to-S velocity 10
ratios, which are not known a-priori. 11
In this study, we avoid the PP-to-PS domain conversion and use PS data directly in 12
the PS time domain. We pick a PS event from PS seismograms that has a good 13
correspondence with a PP event in the PP seismograms along the same profile; we refer it 14
to as the master PS horizon. In the PS forward simulation, we calculate all the PS times 15
relative to the master horizon. The relative PP and PS time for a given layer is calculated 16
by 17
1 12
pps pp
s
Vt t
V⎛ ⎞
Δ = + Δ⎜ ⎟⎝ ⎠
. (22) 18
In equation 22, both pV and sV are interval velocities and are unknown; they will be 19
estimated in inversion procedures. 20
The likelihood functions of PP and PS event registration time are determined by 21
assuming that the errors have multivariate Gaussian distributions. Let Σ pp and Σ ps be the 22

16
covariance matrices of PP and PS event time, respectively. We have the following 1
likelihood functions 2
( ) ( )
( ) ( )
1
2
1/2/2 1
1/2/2 1
1( | ) (2 ) exp , and21( | ) (2 ) exp .2
Tkpp pp pp pp pp pp pp pp
Tkps ps ps ps ps ps ps ps
f
f
π
π
−− −
−− −
⎛ ⎞= Σ − − Σ −⎜ ⎟⎝ ⎠⎛ ⎞= Σ − − Σ −⎜ ⎟⎝ ⎠
T t T t T t
T t T t T t (23) 3
In equation 23, 1k and 2k are the dimensions of ppT and psT ; ppΣ and psΣ are the 4
determinants of the covariance matrix ppΣ and psΣ . 5
Conditionals of unknowns and Markov chain Monte Carlo sampling methods 6
We use Markov chain Monte Carlo methods to draw many samples from the joint 7
distribution given in equation 20. To do this, we first need to derive conditional 8
distributions of each type of unknowns given all other variables and data. The 9
normalizing constants of each conditional are irrelevant when we use MCMC methods to 10
draw samples. Therefore, we only need to keep the term on the right of equation 20 to get 11
its conditional, which are given below 12
( | ) ( | , , , , ) ( | ) ( | , , ) ( ),pp pp ps p s pp pp ps pp p s ppf f f f f⋅ ∝t Q t t v v ρ T t t t v v t (24) 13
( | ) ( | , , , , ) ( | ) ( | , , ),ps pp ps p s ps ps ps pp p sf f f f⋅ ∝t Q t t v v ρ T t t t v v (25) 14
( , , | ) ( | , , , , ) ( | , , ) ( , , | ),p s pp ps p s ps pp p s p sf f f f⋅ ∝v v ρ Q t t v v ρ t t v v v v ρ α (26) 15
( | ) ( , , | ) ( ).p sf f f⋅ ∝α v v ρ α α (27) 16
For equations 24-26, we cannot obtain analytical forms of those conditionals 17
because PP and PS registration time and seismic attributes ,pv sv , and ρ are nonlinear 18

17
functions of other variables. We have to use MCMC methods to draw many samples 1
from the joint posterior distribution. 2
In equation 27, we use the floating-grain rock physics model given in equations 1-3 3
to link layered seismic attributes to their corresponding reservoir parameters, which is a 4
linear function in this case. Let vector r be the combined vector of pv , sv , and ρ 5
arranged by the layer indices and vector α be the corresponding reservoir parameters. 6
We thus have r r= + +r µ Hα ε , where vector rε represents the uncertainty associated 7
with the linear relationship. We assume that it has a multivariate Gaussian distribution 8
with zero mean and the covariance matrix of rΣ . The detailed derivation and specific 9
forms are given in Appendix B. 10
If we use a multivariate Gaussian prior for α , i.e., ( ) ( , )p pf N Σα µ: , we can 11
obtain the analytical formula of posterior distribution, ( | ) ( , )u uf N⋅ Σα µ: , which is 12
given below 13
1 1 1
1 1 1
,
( ) .
Tu r p
Tu u r r p p
− − −
− − −
⎧Σ = Σ +Σ⎪⎨Σ = Σ − +Σ⎪⎩
H Hµ H r µ µ
(28) 14
We can obtain many samples of the joint posterior distribution given in equation 20 by 15
using MCMC sampling methods. 16
CASE STUDY OF MULTIPLE LAYERS 17
We use the second example of Gunning and Glinsky (2007) to demonstrate the 18
benefits of including converted-wave data into estimation of floating-grain fraction. 19
Figure 4 shows various logs from an actual borehole, including P-wave and S-wave 20
velocity, density, P-wave and S-wave velocity ratios, and P-wave impedance. According 21

18
to the logs, we can build a synthetic model with six layers, which are (1) hard marl, (2) 1
soft marl, (3) shale, (4) upper sand, (5) shale, and (6) lower sand, from shallow to deep 2
(see Figure 4). Both upper and lower sands are oil reservoirs with an oil saturation of 3
0.62, the net-to-gross of 0.65, and thicknesses of 213.4 m (or 700 ft) and 109.7 m (or 360 4
ft), respectively. Figure 5 shows the blockwise values of P-wave and S-wave velocity, 5
density, P-wave and S-wave velocity ratios, and P-wave impedance as a function of 6
normalized depth. As shown in the figure, layers 4 and 6 have relatively low Vp/Vs 7
ratios, both of which include the floating-grain fraction of 0.035. 8
PP and PS reflectivities and synthetic seismic data 9
We generate synthetic PP and PS data by first using equations 6 and 7 to calculate 10
PP and PS reflectivities and then convolve the reflectivities with a 30 Hz Ricker wavelet. 11
We consider P-wave incident angles of 0, 9, 18, 27, 36, and 45 degrees. Figure 6 shows 12
the synthetic seismic data without noise added, where PP data are in the PP time domain 13
but the PS data are in the PS time domain. For inversion, we consider the PP trace at the 14
incident angle of zero as PP data, and the PS traces at all the five incident angles as PS 15
data. We extract AVO gradient traces by subtracting the zero incident angle PP trace 16
from the PP traces with nonzero incident angles. We assume that all those data have 17
uncorrelated Gaussian random noise with the standard deviation of 0.01 RFC or 0.02 18
RFC, depending on synthetic cases. 19
Priors for the inversion 20
Since our main focus is on the demonstration of the value of PS data for reservoir 21
parameter estimation, we mainly focus on the estimation of floating-grain fraction and 22
net-to-gross in the upper and lower pay layers. Similar to Gunning and Glinsky (2007), 23

19
we first consider prior 2(0.02,0.03 )X N: ; this is a strong prior for the true floating-grain 1
fraction of 0.035. Secondly, we consider a weak prior 2(0.0,0.05 )X N: ; this give 2
significant prior probability to the zero floating-grain fraction or clean sand. For net-to-3
gross (NG), we also consider two types of priors: (1) 2~ (0.6,0.1 )NG N , and (2) 4
2~ (0.5,0.3 )NG N . 5
Since we use model-based inversion methods, we can set a wide range of priors and 6
consider many parameters as unknowns. For example, we assume that PP traveltime to 7
each interface has the normal distribution with the true values as mean and 10 8
milliseconds as the standard deviation. We assume that the uncertainty in the thickness of 9
layer 4 is 21.3 m (or 70 ft) (i.e., 10% of the thickness) and 6.1 m (or 20 ft) for other 10
layers. 11
Inversion cases 12
To test the usefulness of PS data for improving parameter estimation, we invert 13
synthetic seismic data under the following four scenarios: (1) using only the PP data, (2) 14
using PP and AVO gradient data, (3) using PP and PS data, and (4) using all the seismic 15
data. We compare the posterior estimates of unknowns under each case with their 16
corresponding prior distributions to evaluate the benefit of using PS data. 17
Since the above comparisons usually depend on inversion situation, we consider 18
the following three factors: (1) prior on floating-grain fraction (i.e., 2(0.02, 0.03 )X N: 19
or 2(0.0, 0.05 )X N: ), (2) prior on net-to-gross (i.e., 2(0.6, 0.1 )NG N: or 20
2(0.5, 0.3 )NG N: ), and (3) noise levels. We consider two sets of noise levels. The first 21

20
one is that all seismic data have a noise level of 0.01 RFC, and the other is that the PP 1
data has a noise level of 0.01 RFC but other data have a noise level of 0.02 RFC. 2
By changing priors and noise levels, we obtain many sets of posterior distributions. 3
We use MCMC methods to draw 20,000 samples and keep the later half for analysis (i.e., 4
10,000 samples). As an example, Figure 7 shows 200 realizations, selected from the 5
10,000 samples by keeping every 50th draw of the chain, for effective P-wave and S-wave 6
velocity and density along the profile in the case using strong priors (i.e., 7
2(0.02, 0.03 )X N: , and 2~ (0.6,0.1 )NG N ) and PP and PS data, where the red line 8
segments are their corresponding true values. Although those realizations are around the 9
true values, considerable uncertainties exist. With the use of those samples, we can obtain 10
wide ranges of statistics, such as means, medians, modes, density functions, and 11
predictive intervals. In the following several subsections, we selectively report our 12
inversion results. 13
Estimation of floating-grain fraction, porosity, and net-to-gross 14
We compare the estimates of reservoir parameters (i.e., floating-grain fraction, net-15
to-gross, and porosity) under different prior distributions. To investigate the effects of 16
priors about floating-grain fraction, we use a strong prior about net-to-gross, i.e., 17
2~ (0.6,0.1 )NG N , and noise levels for all the data types of 0.01 RFC. This implies the 18
same quality for all the seismic data. We will explore the effects of noise levels later on. 19
Figure 8 compares the posterior probability densities (PDFs) of floating-grain 20
fraction, porosity, and net-to-gross with their corresponding prior PDFs for layer 4 (i.e., 21
upper-pay layer). For floating-grain fraction, even under the good prior (i.e, 22
2~ (0.02,0.03 )X N ), the mode of the prior probability corresponds to the zero floating-23

21
grain fraction or clean sand. After conditioning to seismic data (i.e., PP data, PP plus 1
AVO data, or PP plus PS data), the modes of the posterior PDFs corresponds to the true 2
values 0.035, with the results of using PP and PS data fitting better than the other two. As 3
shown in Figure 9a, if we use a biased prior to clean sand, say 2~ (0.0,0.05 )X N , the 4
posterior estimates of floating-grain fraction using PP data only and using both PP and 5
AVO gradient data provide biased results (i.e., clean sand). However, the combination of 6
PP and PS data still provides correct estimates of the true value. 7
We can get similar results for comparison of porosity PDFs. Under the good prior 8
of floating-grain fraction, the modes of the posterior estimates for all the combinations of 9
seismic data correspond to the true value well (see Figure 8b). But under the biased prior 10
of floating-grain fraction, only the posterior estimates obtained using PP and PS data 11
provide good estimates of porosity (see Figure 9b). Since we use a very strong prior 12
about net-to-gross (i.e., 2~ (0.6,0.1 )NG N ) for the true value of 0.65, we expect the 13
updating of the prior to be minimal for all the posterior estimates (Figure 9c). 14
We have similar comparisons of posterior PDFs for the lower-pay layer (i.e., layer 15
6). As shown in Figure 10, although overall the posterior estimates of floating-grain 16
fraction and porosity are worse than those in the upper-pay layer, the combination of PP 17
and PS data provides more information than PP data only or the combination of PP and 18
AVO gradient data for updating the priors of floating-grain fraction and porosity. 19
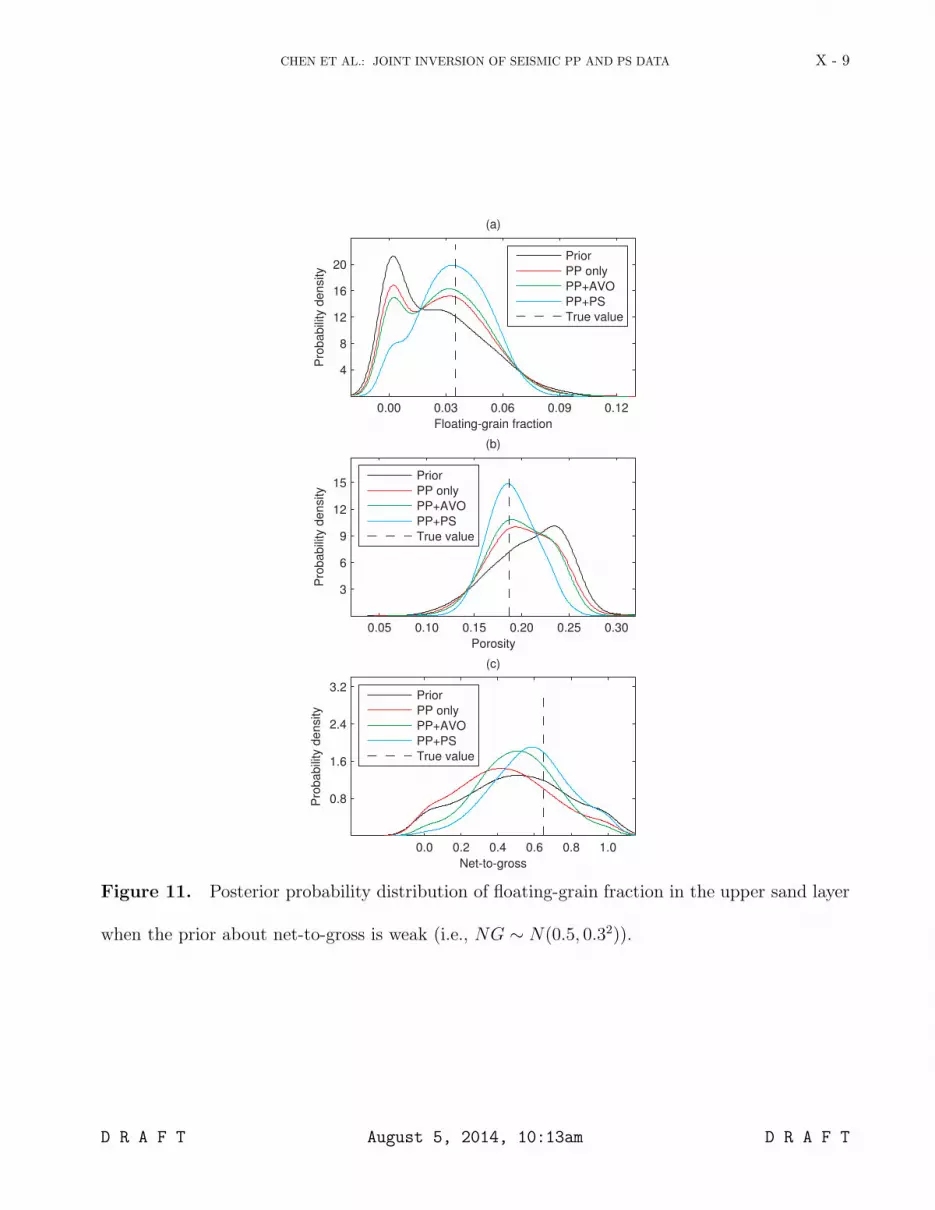
Effects of the prior about net-to-gross and noise levels in seismic data 20
To explore the effects of prior about net-to-gross, we use less informative prior 21
(i.e., 2~ (0.5,0.3 )NG N ) for net-to-gross and good prior about floating-grain fraction (22
2~ (0.02,0.03 )X N ). Since the properties in the lower-pay layer are much less sensitive 23

22
to seismic data, we only do the comparison for the upper-pay layer. Similar to what we 1
found earlier, the combination of PP and PS data significantly improve the estimates of 2
floating-grain fraction and porosity. Unlike the previous comparison in Figures 8c and 9c, 3
we found the combined use of PP and PS data in this case significantly improve the 4
estimates of net-to-gross when it has significant uncertainty (see Figure 11c). 5
In reality, it is more difficult to collect and process PS and AVO gradient data 6
compared to PP data. Therefore, they are likely subject to larger noise. To explore the 7
effects of noise levels on reservoir parameter estimation, we let the prior of floating-grain 8
fraction be 2~ (0.02,0.03 )X N and let net-to-gross prior be 2~ (0.6,0.1 )NG N . We set 9
the noise level in the PP data still as 0.01 RFC but noise levels in the PS and AVO 10
gradient data as 0.02 RFC. Figure 12 shows the posterior PDFs of floating-grain fraction, 11
porosity and net-to-gross. Although the estimated results are slightly worse than those 12
obtained using noise levels of 0.01 RFC for all the seismic data (see Figure 8), the 13
conclusions remain the same. 14
Comparison of discrepancies between the estimated and the true values 15
Since we use sampling-based methods for inversion, we can obtain many samples 16
of other variables as given in equation 20, such as effective P-wave and S-wave velocity, 17
density, layer-thickness, etc. With the use of those samples, we can not only visually 18
compare prior and posterior PDFs but also calculate a wide range of statistics. In the 19
previous comparisons, we qualitatively compare the posterior estimates with their 20
corresponding priors. To demonstrate the value of PS data, in this subsection, we 21
quantitatively compare the estimated results with their corresponding true values. 22

23
We first compare the difference between the estimated median and the true value, 1
which measures how accurate a chosen point estimator (in this case, median) to the true 2
value of a given parameter. Figure 13a compares the differences between the estimated 3
floating-grain fraction, porosity, and net-to-gross values with their true values. The priors 4
for floating-grain fraction is 2~ (0.0,0.05 )X N and for net-to-gross is 2~ (0.6,0.1 )NG N , 5
and the noise levels are 0.01 RFC for PP data and 0.02 for other data sets. We normalize 6
the results by the difference obtained from prior distributions. For net-to-gross, as we 7
demonstrated early, under the good prior, the estimated medians do not improve the prior 8
medians. The value slightly over 1.0 may reflect the effects of noise in seismic data or 9
sampling variations during the inversion procedure. For floating-grain fraction and 10
porosity, when conditioning to PP data, the differences are significantly reduced. When 11
adding AVO gradient data, the improvement is minimal, but adding PS data leads to 12
further reduction. 13
Figure 13b compares the differences for effective P-wave and S-wave velocity, 14
effective density, and layer thickness. For effective P-wave velocity and density, 15
conditioning to PP data significantly improves the accuracy, and further adding AVO 16
gradients or PS data does not lead to a significant reduction. However, for estimation of 17
effective S-wave velocity and layer thickness, either adding AVO gradient stacks or PS 18
data lead to further reduction of the discrepancies, but adding the PS data gives the best 19
results. For density, adding PS data does not lead to significant reduction in uncertainty. 20
This is because for the current case study, after conditioning to PP data, the uncertainty is 21
already very small, leaving less room for further improvement. 22
Comparison of widths of uncertainty bounds 23

24
The MCMC-based methods also allow us to quantitatively compare the uncertainty 1
associated with all the estimation. In this study, we calculate the widths of 95% predictive 2
intervals. Similar to the comparison of the discrepancies, we normalize the results by 3
those obtained from the prior PDFs. 4
Figure 14 shows the results for reservoir parameters and for effective parameters. 5
For reservoir parameters (i.e., floating-grain fraction, porosity, and net-to-gross), the 6
reduction of uncertainty is small and the maximum reduction is around 20%. The use of 7
various combinations of seismic data does not seem to make a significant difference. For 8
P-wave velocity and density, after conditioning to PP data, adding AVO gradient data or 9
PS data does not lead further significant reduction. However, for S-wave velocity and 10
layer thickness, adding PS data causes significantly more reduction in the uncertainty 11
than adding AVO gradient data. 12
Comparison of predictive probabilities 13
In the previous sections, we compare the discrepancies between the estimated and 14
true value and the widths of uncertainty bounds, both of which just compare one aspect of 15
posterior PDFs. A better evaluation is to compare the predictive probabilities of a small 16
interval around the true value, which is given by 17
Prob( [(1 ) ,(1 ) ] | Data)True Trueβ ε β ε β∈ − + . (29) 18
In equation 29, symbol β represents a variable under estimation. We set 2.5%ε = for 19
effective density and 5% for other parameters because the posterior density has much 20
smaller uncertainty compared to other effective properties. The large predictive 21
probability means that the data provide stronger evidence to support the occurrence of the 22
true values. Again, we normalize the probabilities by the prior predictive probability. 23

25
Figure 15a compares the predictive probability ratios of floating-grain fraction, 1
porosity, and net-to-gross. These results are more consistent than those shown in Figures 2
13a and 14a as the ratios of net-to-gross are very close to 1.0. This means that for the 3
tight prior of net-to-gross ( 2~ (0.6,0.1 )NG N ), the updating is ignorable. For floating-4
grain fraction and porosity, the use of PP data significantly increases the predictive 5
probabilities. Adding AVO gradient data does not cause significant improvement. 6
However, adding PS data leads to significant improvement again. Figure 15b shows the 7
comparison for effective P-wave and S-wave velocity, effective density, and layer 8
thickness. Similarly, we found that adding PS data significantly improves the estimates of 9
effective S-wave velocity and layer thickness compared to Figures 14b and 15b. 10
CONCLUSIONS 11
We started from likelihood analysis of a simple two-layer model, with the first 12
layer being shale and the second layer being sand, and found that seismic PS data are 13
significantly more informative than AVO gradient data, even with the high-order term 14
included, for reservoir parameter estimation. Although this analysis is based on a 15
floating-grain rock physics model, it is straightforward to extend the method to other rock 16
physics models. We assume in the study that we have a suitable rock physics model to 17
link seismic attributes to reservoir parameters and seismic data are of reasonable quality. 18
Without those assumptions, we may not be able to verify the benefits of using PS data. 19
We developed a hierarchical Bayesian model to combine PP and PS data for 20
complicated situations (e.g., multiple layers, a large number of unknowns, etc), motivated 21
by the analytical results. We inverted PS data directly in the PS time domain unlike many 22
previous methods, which first convert PS time to PP time and then invert PS data in the 23

26
PP time domain. The alignment of PP and PS time in our model is carried out by 1
identifying one common reflection interface and using the PP and PS time to the common 2
interface as references. This avoids many difficulties caused by the conversion of PS time 3
to PP time, such as the distortion of wavelets, and the requirement of knowing internal P-4
wave to S-wave velocity ratios a-priori. 5
We performed comparison studies based on a synthetic six-layer model to 6
demonstrate the value of PS data for estimating reservoir parameters. PS data are very 7
helpful for improving the estimates of porosity and floating-grain fraction and for 8
improving the estimates of effective S-wave velocity and layer-thickness under a range of 9
priors and noise levels in seismic data. Net-to-gross is relatively less sensitive to PS data. 10
Compared to the posterior results obtained from PP plus AVO gradient data, PP data are 11
most informative for parameter estimation, then PS data, and finally AVO gradient data. 12
This suggests that to improve the estimates of reservoir parameters, PS data are more 13
valuable because PS data can provide complementary information to PP data, and give 14
similar but better information than AVO gradient data. Consequently, they have the 15
potential of significantly improving parameter estimation results. 16
We claim that PS data are more informative than AVO gradient data for reservoir 17
parameter estimation. To be precise, the PS data include some information from the 18
matching between PP and PS time because we considered PS time registration as data in 19
the model. The success of using PS data in the inversion depends on the existence of at 20
least one reference PS time. In the cases where we cannot find a good matching between 21
PP and PS time, we may pick up multiple possible matching with uncertainty. Under 22
these situations, the value of using PS data may be less apparent than what we have 23

27
demonstrated in the six-layer models. In addition, since we used the convolution method 1
for forward simulation of PP and PS responses, we need to have known PP and PS 2
wavelets. This could be difficult in practice and thus limits the applicability of the current 3
model. 4
ACKNOWLEDGMENTS 5
We thank Ion Geophysical for funding and for permission to publish this work. We 6
thank James Gunning from CSIRO for providing help in understanding the Delivery 7
codes and Doug Sassen from Ion Geophysical for helping to answer some questions. We 8
also thank Drs. Sam Kaplan, Helene Hafslund Veire, Miguel Bosch, and one anonymous 9
reviewer for their constructive comments. 10
APPENDIX A 11
DATA MATRICES FOR SYNTHETIC TWO-LAYER MODELS 12
For the case of using only PP data, we set (1,0,0)d =M . For the case of using PP 13
and PS data, we set 14
1 0 00 1 0d⎛ ⎞
= ⎜ ⎟⎝ ⎠
M . (A-1) 15
Similarly, for the case of using PP and AVO gradient traces, we set 16
1 0 00 0 1d⎛ ⎞
= ⎜ ⎟⎝ ⎠
M . (A-2) 17
For the case of using all seismic data, we set 18

28
1 0 00 1 00 0 1
d
⎛ ⎞⎜ ⎟= ⎜ ⎟⎜ ⎟⎝ ⎠
M . (A-3) 1
APPENDIX B 2
DERIVATION OF MEAN VECTOR AND COVARIANCE MATRICES 3
In the current study, we assume that the reservoir parameters under estimation are 4
loading-depth and floating-grain fraction. Let piv , siv , iρ , iz , and ix be seismic P- and S-5
wave velocity, density, loading depth, and floating-grain fraction at the i-th layer, 6
respectively. From the rock physics model in given equation 1-5, we have 7
= .
pi vp vp vp vpi
i si vs vp vs vp vs vp vs vs vp vsi
i vp vp vp vp
ri i i ri
v a b cz
v a a b b b c b bx
a a b b b c b c bρ ρ ρ ρ ρ ρ ρ
εε ε
ρ ε ε
⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎛ ⎞⎛ ⎞⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟= = + + + +⎜ ⎟⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎝ ⎠⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟+ + +⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠
+ +
r
µ H α ε (B-1) 8
We can form vectors and matrices for all the layers by stacking those layer-based vectors 9
and matrices, i.e., 1 2( , , , )T T T Tn=r r r rL , 1 2( , , , )T T T T
r n=µ µ µ µL , 1 2( , , , )T T T Tn=α α α αL , 10
1 2( , , , )T T T Tr n=ε ε ε εL , and 1 2( , , , )T T T T
n=H H H HL . 11
It is straightforward to derive the covariance matrix from equation B-1 by assuming 12
that residuals vpε , vsε , and ρε in equations 1-3 have Gaussian distributions with zero 13
mean and variances of 2vpσ , 2
vsσ , and 2ρσ , respectively. Specifically, the matrix is 14
2 2 2 2
2 2 2
1/ .
/
vs
ri vp vs vs vs vp vs
vs vp
b bb b b bb b b b
ρ
ρ
ρ ρ ρ ρ
σ σ σσ σ
⎛ ⎞⎜ ⎟Σ = +⎜ ⎟⎜ ⎟+⎝ ⎠
(B-2) 15

29
The covariance matrix 1 2( , , , ).r ndiagΣ = Σ Σ ΣL 1
2

30
REFERENCES 1
Aki, K., and P. G. Richards, 1980, Quantitative seismology: Theory and methods: W. H. 2
Freeman and Co. 3
Bale, R., T. Marchand, K. Wilkinson, K. Wikel, and R. Kendall, 2013, The signature of 4
shear-wave splitting: Theory and observations on heavy oil data: The Leading Edge, 5
32, 14-24. 6
Bansal, R., and M. Matheney, 2010, Wavelet distortion correction due to domain 7
conversion: Geophysics, 75, No. 6, V77-V87. 8
Bernardo, J. M., and F. M. Smith, 2000, Bayesian theory: John Wiley & Sons, LTD. 9
Brettwood, P., J. P. Leveille, and S. Singleton, 2013, C-wave data improve seismic 10
imaging: The American Oil & Gas Reporter, 1. 11
Castagna, J. P., H. W. Swan, and D. J. Foster, 1998, Framework for AVO gradient and 12
intercept interpretation: Geophysics, 63, No. 3, 948-956. 13
Chen, J., A. Kemna, and S. Hubbard, 2008, A comparison between Gauss-Newton and 14
Markov chain Monte Carlo based methods for inverting spectral induced polarization 15
data for Cole-Cole parameters: Geophysics, 73, No. 6, F247-F259. 16
Davis, T. L., A. Bibolova, S. O’Brien, D. Klepacki, and H. Robinson, 2013, Prediction of 17
residual oil saturation and cap-rock integrity from time-lapse, multicomponent seismic 18
data, Delhi field, Louisiana: The Leading Edge, 32, 26-31. 19
DeMartini, D. C., and M. E. Glinsky, 2006, A model for variation of velocity versus 20
density trends in porous sedimentary rocks: Journal of Applied Physics, 100, 014910. 21

31
Gardner, G. H. F., L. W. Gardner, and A. R. Gregory, 1974, Formation velocity and 1
density – The diagnostic basics for stratigraphic traps: Geophysics, 39, No. 6, 770-2
780. 3
Glinsky, M. E., A. Cortis, D. Sassen, H. Rael, and J. Chen, 2013, Rock physics and 4
geophysics for unconventional resources, multicomponent seismic, quantitative 5
interpretation: The 2nd International Workshop on Rock Physics (2IWRP), 2013, South 6
Hampton, United Kingdom, August 4-9, http://arxiv.org/abs/1304.6048. 7
Gunning, J., and M. E. Glinsky, 2004, Delivery: an open-source model-based Bayesian 8
seismic inversion program: Computers and Geosciences, 30, 619-636. 9
Gunning, J., and M. E. Glinsky, 2007, Detection of reservoir quality using Bayesian 10
seismic inversion: Geophysics, 72, No. 3, R37-R49. 11
Hardage, B. A., M. V. DeAngelo, P. E. Murray, and D. Sava, 2011, Multicomponent 12
seismic technology: Society of Exploration Geophysicists. 13
Mahmoudian, F., and G. F. Margrave, 2004, Three-parameter AVO inversion with PP 14
and PS data using offset-binning: CREWES Report, 16. 15
Pacal, E. E., 2012, Seismic imaging with ocean-bottom nodes (OBNs): new acquisition 16
designs and the Atlantis 4C OBN: Master Thesis, University of Houston. 17
Rodriguez-Saurez, C., 2000, Advanced marine methods: ocean- bottom and vertical cable 18
analyses: PhD Thesis, University of Calgary. 19
Stewart, R. R., J. E. Gaiser, R. J. Brown, and D. C. Lawton, 2002, Tutorial: Converted-20
wave seismic exploration: methods: Geophysics, 67, No. 5, 1348-1363. 21
32
Stone, C. J., 1995, A course in probability and statistics: Duxbury Press. 1
Tarantola, A., 2005, Inverse problem theory and methods for model parameter 2
estimation: The Society for Industrial and applied mathematics (SIAM), Philadelphia, 3
PA. 4
Veire, H. H., and Landrø, M., 2006, Simultaneous inversion of PP and PS seismic data: 5
Geophysics, 71, No. 3, R1–R10. 6
Venables, W. N., and B. D. Ripley, 1999, Modern applied statistics with S-Plus, Third 7
Edition, Springer, New York. 8
9

33
FIGURE CAPTIONS 1
Figure 1: Likelihoods of floating-grain fraction given various data combinations for the 2
true value of (a) 0.0%, and (b) 3.5%. 3
Figure 2: Likelihood ratios of using various combinations of seismic data compared to 4
that of using PP data only as a function of measurement errors in PS and AVO 5
gradient data for the true value of (a) 0.0%, and (b) 3.5%. 6
Figure 3: Dependent relationships among unknown parameters and data. 7
Figure 4: Various logs from an actual borehole as a function of depth: (a) P-wave 8
velocity (km/s), (b) S-wave velocity (km/s), (c) density (g/cc), (d) Vp/Vs, and (e) P-9
Impedance (MPa). 10
Figure 5: Blocked values obtained from the borehole logs using Backus average as a 11
function of relative depth: (a) P-wave velocity (km/s), (b) S-wave velocity (km/s), (c) 12
density (g/cc), (d) Vp/Vs, and (e) P-Impedance (MPa). 13
Figure 6: Synthetic seismic PP (a) and PS (b) data as a function of P-wave incident 14
angles. 15
Figure 7: Selected realizations of effective P-wave (a) and S-wave (b) velocity and 16
density (c) using a thinning of 50 from the 10,000 samples, where the red line 17
segments are the true values. 18
Figure 8: Posterior probability distributions of floating-grain fraction (a), porosity (b), 19
and net-to-gross (c) in the upper sand layer when priors about floating-grain fraction 20

34
and net-to-gross are strong (i.e., 2(0.02, 0.03 )X N: , and 2(0.6, 0.1 )NG N: , the 1
reference case). 2
Figure 9: Posterior probability distributions of floating-grain fraction (a), porosity (b), 3
and net-to-gross (c) in the upper sand layer when the prior about floating-grain 4
fraction is weak (i.e., 2(0.0, 0.05 )X N: ). 5
Figure 10: Posterior probability distributions of floating-grain fraction (a), porosity (b), 6
and net-to-gross (c) in the lower sand layer when priors about floating-grain fraction 7
and net-to-gross are strong (i.e., 2(0.02, 0.03 )X N: , and 2(0.6, 0.1 )NG N: ). 8
Figure 11: Posterior probability distributions of floating-grain fraction (a), porosity (b), 9
and net-to-gross (c) in the upper sand layer when the prior about net-to-gross is weak 10
(i.e., 2(0.5, 0.3 )NG N: ). 11
Figure 12: Posterior probability distributions of floating-grain fraction (a), porosity (b), 12
and net-to-gross (c) in the upper sand layer when the errors in the AVO gradient and 13
PS data are doubled. 14
Figure 13: Comparison of differences between the true values and estimated medians for 15
priors 2(0.0, 0.05 )X N: , 2(0.6, 0.1 )NG N: , and noise of 0.01 RFC for PP data and 16
0.02 RFC for others, where 'R0' represents PP data only, 'R0R1' represents PP plus PS 17
data, 'R0R2' represents PP plus AVO gradient data, and 'R0R1R2' represents all the 18
data. 19
Figure 14: Comparison of half-widths of 95% predictive intervals for priors 20
2(0.0, 0.05 )X N: , 2(0.6, 0.1 )NG N: , and noise of 0.01 RFC for PP data and 0.02 21

35
RFC for others, where 'R0' represents PP data only, 'R0R1' represents PP plus PS data, 1
'R0R2' represents PP plus AVO gradient data, and 'R0R1R2' represents all the data. 2
Figure 15: Comparison of predictive probability of the true values for priors 3
2(0.0, 0.05 )X N: , 2(0.6, 0.1 )NG N: , and noise of 0.01 RFC for PP data and 0.02 4
RFC for others, where 'R0' represents PP data only, 'R0R1' represents PP plus PS data, 5
'R0R2' represents PP plus AVO gradient data, and 'R0R1R2' represents all the data. 6

Table 1: Sand and shale rock-physics model coefficients from actual borehole logs
Regression Equations Standard Errors Units
Sand
645 0.508 5490pv z x= + + 105 m/s
1220 0.894s pv v= − + 69 m/s
41.70 1.65 10 1.56pv xρ −= + × + 0.0149 g/cc
Shale
1640 0.946pv z= − + 145 m/s
1030 0.801s pv v= − + 63 m/s
0.1660.651 pvρ = 0.030 g/cc

CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA X - 1
0.03 0.06 0.09 0.12 0.15 0.18
3
6
9
12
15
Floating-grain fraction
Lik
elih
ood
(a)
PP only
PP+AVO
PP+PS
All data
0.03 0.06 0.09 0.12 0.15 0.18
2
4
6
8
10
Floating-grain fraction
Lik
elih
ood
(b)
PP only
PP+AVO
PP+PS
All data
Figure 1. Likelihoods of floating-grain fraction given various data combinations for the true
value of (a) 0.0% and (b) 3.5%.
D R A F T August 5, 2014, 10:13am D R A F T

X - 2 CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA
0.02 0.04 0.06 0.08 0.10
1.1
1.2
1.3
1.4
1.5
Noise level (RFC)
Lik
elih
ood r
atio
(a)
PP+AVO vs. PP
PP+PS vs. PP
All data vs. PP
0.02 0.04 0.06 0.08 0.10
1.1
1.2
1.3
1.4
1.5
Noise level (RFC)
Lik
elih
ood r
atio
(b)
PP+AVO vs. PP
PP+PS vs. PP
All data vs. PP
Figure 2. Likelihood ratios of using various combinations of seismic data compared to that of
using PP data only as a function of measurement errors in PS and AVO gradient data.
Figure 3. Dependent relationships among unknown parameters and data.
D R A F T August 5, 2014, 10:13am D R A F T

CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA X - 3
3 4 5
2.52
2.56
2.60
2.64
(a)
Vp (km/s)
Depth
TV
D (
×10
4)
1 2 3
2.52
2.56
2.60
2.64
(b)
Vs (km/s)
2.3 2.5 2.7
2.52
2.56
2.60
2.64
(c)
Density (g/cc)
1.6 2.0 2.4
2.52
2.56
2.60
2.64
(d)
Vp/Vs
6 10 14
2.52
2.56
2.60
2.64
(e)
Zp (MPa)
Figure 4. Various logs from an actual borehole as a function of depth: (a) P-wave velocity
(km/s), (b) S-wave velocity (km/s), (c) density (g/cc), (d) Vp/Vs, and (e) P-Impedance (MPa).
D R A F T August 5, 2014, 10:13am D R A F T

X - 4 CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA
2.8 3.2 3.6
0.2
0.4
0.6
0.8
1.0
(a)
Vp (km/s)
Norm
aliz
ed d
epth
1.2 1.6 2.0
0.2
0.4
0.6
0.8
1.0
(b)
Vs (km/s)
2.3 2.4 2.5
0.2
0.4
0.6
0.8
1.0
(c)
Density (g/cc)
2.0 2.2 2.4
0.2
0.4
0.6
0.8
1.0
(d)
Vp/Vs
7.0 8.0 9.0
0.2
0.4
0.6
0.8
1.0
(e)
Zp (MPa)
Figure 5. Blocked values obtained from the borehole logs using Backus average as a function
of relative depth: (a) P-wave velocity (km/s), (b) S-wave velocity (km/s), (c) density (g/cc), (d)
Vp/Vs, and (e) P-Impedance (MPa).
9 27 45
7.35
7.45
7.55
7.65
Angle (degrees)
Tim
e (
ms)
(a)
9 27 45
8.90
9.00
9.10
9.20
9.30
Angle (degrees)
Tim
e (
ms)
(b)
Figure 6. Synthetic seismic PP (a) and PS (b) data as a function of P-wave incident angles.
D R A F T August 5, 2014, 10:13am D R A F T

CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA X - 5
3.0 3.5 4.0
0.2
0.4
0.6
0.8
1.0
(a)
Vp (km/s)
Norm
aliz
ed d
epth
1.2 1.6 2.0
0.2
0.4
0.6
0.8
1.0
(b)
Vs (km/s)
Norm
aliz
ed d
epth
2.2 2.4 2.6
0.2
0.4
0.6
0.8
1.0
(c)
Density (g/cc)
Norm
aliz
ed d
epth
Figure 7. Selected realizations of effective P-wave (a) and S-wave (b) velocity and density (c)
using a thinning of 50 from the 10,000 samples, where the red line segments are the true values.
D R A F T August 5, 2014, 10:13am D R A F T

X - 6 CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA
0.00 0.03 0.06 0.09 0.12
4
8
12
16
20
Floating-grain fraction
Pro
babili
ty d
ensity
(a)
Prior
PP only
PP+AVO
PP+PS
True value
0.05 0.10 0.15 0.20 0.25 0.30
3
6
9
12
15
Porosity
Pro
babili
ty d
ensity
(b)
Prior
PP only
PP+AVO
PP+PS
True value
0.2 0.4 0.6 0.8 1.0
1
2
3
4
5
Net-to-gross
Pro
babili
ty d
ensity
(c)
Prior
PP only
PP+AVO
PP+PS
True value
Figure 8. Posterior probability distribution of floating-grain fraction in the upper sand layer
when priors about floating-grain fraction and net-to-gross are strong (i.e., X ∼ N(0.02, 0.032),
and NG ∼ N(0.6, 0.12), the reference case).
D R A F T August 5, 2014, 10:13am D R A F T

CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA X - 7
0.00 0.03 0.06 0.09 0.12
5
10
15
20
25
30
Floating-grain fraction
Pro
babili
ty d
ensity
(a)
Prior
PP only
PP+AVO
PP+PS
True value
0.05 0.10 0.15 0.20 0.25 0.30
3
6
9
12
15
Porosity
Pro
babili
ty d
ensity
(b)
Prior
PP only
PP+AVO
PP+PS
True value
0.2 0.4 0.6 0.8 1.0
1
2
3
4
5
Net-to-gross
Pro
babili
ty d
ensity
(c)
Prior
PP only
PP+AVO
PP+PS
True value
Figure 9. Posterior probability distribution of floating-grain fraction in the upper sand layer
when the prior about floating-grain fraction is weak (i.e., X ∼ N(0.0, 0.052)).
D R A F T August 5, 2014, 10:13am D R A F T

X - 8 CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA
0.00 0.03 0.06 0.09 0.12
4
8
12
16
20
Floating-grain fraction
Pro
babili
ty d
ensity
(a)
Prior
PP only
PP+AVO
PP+PS
True value
0.05 0.10 0.15 0.20 0.25 0.30
3
6
9
12
15
Porosity
Pro
babili
ty d
ensity
(b)
Prior
PP only
PP+AVO
PP+PS
True value
0.2 0.4 0.6 0.8 1.0
1
2
3
4
5
Net-to-gross
Pro
babili
ty d
ensity
(c)
Prior
PP only
PP+AVO
PP+PS
True value
Figure 10. Posterior probability distribution of floating-grain fraction in the lower sand layer
when priors about floating-grain fraction and net-to-gross are strong (i.e., X ∼ N(0.02, 0.032),
and NG ∼ N(0.6, 0.12)).
D R A F T August 5, 2014, 10:13am D R A F T
CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA X - 9
0.00 0.03 0.06 0.09 0.12
4
8
12
16
20
Floating-grain fraction
Pro
babili
ty d
ensity
(a)
Prior
PP only
PP+AVO
PP+PS
True value
0.05 0.10 0.15 0.20 0.25 0.30
3
6
9
12
15
Porosity
Pro
babili
ty d
ensity
(b)
Prior
PP only
PP+AVO
PP+PS
True value
0.0 0.2 0.4 0.6 0.8 1.0
0.8
1.6
2.4
3.2
Net-to-gross
Pro
babili
ty d
ensity
(c)
Prior
PP only
PP+AVO
PP+PS
True value
Figure 11. Posterior probability distribution of floating-grain fraction in the upper sand layer
when the prior about net-to-gross is weak (i.e., NG ∼ N(0.5, 0.32)).
D R A F T August 5, 2014, 10:13am D R A F T

X - 10 CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA
0.00 0.03 0.06 0.09 0.12
5
10
15
20
25
30
Floating-grain fraction
Pro
babili
ty d
ensity
(a)
Prior
PP only
PP+AVO
PP+PS
True value
0.05 0.10 0.15 0.20 0.25 0.30
3
6
9
12
15
Porosity
Pro
babili
ty d
ensity
(b)
Prior
PP only
PP+AVO
PP+PS
True value
0.2 0.4 0.6 0.8 1.0
1
2
3
4
5
Net-to-gross
Pro
babili
ty d
ensity
(c)
Prior
PP only
PP+AVO
PP+PS
True value
Figure 12. Posterior probability distribution of floating-grain fraction in the upper sand layer
when the errors in the AVO gradient and PS data are doubled.
D R A F T August 5, 2014, 10:13am D R A F T

CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA X - 11
Prior R0 R0R2 R0R1 R0R1R2
0.5
1.0
1.5
Used data
Norm
aliz
ed d
iffe
rence
(a)
Floating−grain fraction
Porosity
Net−to−gross
Prior R0 R0R2 R0R1 R0R1R2
0.5
1.0
1.5
Used data
Norm
aliz
ed d
iffe
rence
(b)
Effective vp
Effective vs
Effective density
Thickness
Figure 13. Comparison of differences between the true values and estimated medians for
priors X ∼ N(0.0, 0.052), NG ∼ N(0.6, 0.12), and noise of 0.01 RFC for PP data and 0.02
RFC for others, where ’R0’ represents PP data only, ’R0R1’ represents PP plus PS data, ’R0R2’
represents PP plus AVO gradient data, and ’R0R1R2’ represents all the data.
D R A F T August 5, 2014, 10:13am D R A F T

X - 12 CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA
Prior R0 R0R2 R0R1 R0R1R2
0.3
0.6
0.9
1.2
1.5
Used data
Wid
th o
f 95%
inte
rvals
(a)
Floating−grain fraction
Porosity
Net−to−gross
Prior R0 R0R2 R0R1 R0R1R2
0.3
0.6
0.9
1.2
1.5
Used data
Wid
th o
f 95%
inte
rvals
(b)
Effective vp
Effective vs
Effective density
Thickness
Figure 14. Comparison of half-widths of 95% predictive intervals for priors X ∼ N(0.0, 0.052),
NG ∼ N(0.6, 0.12), and noise of 0.01 RFC for PP data and 0.02 RFC for others, where ’R0’
represents PP data only, ’R0R1’ represents PP plus PS data, ’R0R2’ represents PP plus AVO
gradient data, and ’R0R1R2’ represents all the data.
D R A F T August 5, 2014, 10:13am D R A F T

CHEN ET AL.: JOINT INVERSION OF SEISMIC PP AND PS DATA X - 13
Prior R0 R0R2 R0R1 R0R1R2
1.0
1.5
2.0
2.5
3.0
Used data
Pro
babili
ty r
atio
(a)
Floating−grain fraction
Porosity
Net−to−gross
Prior R0 R0R2 R0R1 R0R1R2
1.0
1.5
2.0
2.5
3.0
Used data
Pro
babili
ty r
atio
(b)
Effective vp
Effective vs
Effective density
Thickness
Figure 15. Comparison of predictive probability of the true values for priorsX ∼ N(0.0, 0.052),
NG ∼ N(0.6, 0.12), and noise of 0.01 RFC for PP data and 0.02 RFC for others, where ’R0’
represents PP data only, ’R0R1’ represents PP plus PS data, ’R0R2’ represents PP plus AVO
gradient data, and ’R0R1R2’ represents all the data.
D R A F T August 5, 2014, 10:13am D R A F T





























