Embed Size (px)
Citation preview
DAFTAR ISTILAH
Bandwidth
C/A-code
Carrier
Carrier phase GPS
Chantiel
Chip
Clock bias
Code phase GPS
Control segmenl
bentangan frekuensi dalam sinyal
kode standart dalam GPS, Coarse-Acquisitioti Code.
Sebuah sekuen modulasi biphase, binary, pseudo-
random 1023 bit pada gelombang pembawa sinyal
GPS pada 1.023 MHz chip rate. Umumnya clisebut
juga dengan civilian code.
gelombang pembawa
pengukuran GPS berdasarkan pada gelombang
pembawa L1 dan L2
jalur penerima GPS yatig berfungsi untuk mencritna
sinyal dari sebuah satelil GPS
waktu transisi untuk tiap-tiap bit dalarn sekuen
pseudo-random.
perbedaan waktu antara jam penunjuk waktu dengan
waktn universal.
pengukuran GPS bcrdasarkan pada kodc
pscudorandom (C7A alau P) sebagai Liwan dari
carncr.
jaringan monitor dan stasiun kontrol GPS yang
memastikan akurasi posisi satelit dan jam satelit.
129
Cycle slip
Data message
Differential positioning
Dilution of Precision
Ephemeris
"Frequency band
Frequency spectrum
Handover word
lonosphere
Ionospheric refraction
suatu diskontinuitas pada gelombang pembawa yang
diukur sebagai hasil dari hilangnya sinyal
pendeteksi pada penerima GPS.
pesari yang tercantum dalam sinyal GPS yang
melaporkan mengenai keadaan satelit, I-;oreksi
waktu dan kesehatan satelit.
pengukuran yang akurat terhadap posisi relatif dari
dua penerima GPS yang menerima sinyal GPS yang
sama.
faktor pengali yang memodifikasi beniangan
kesalahan. Umumnya disebabkan oleh pcrbcdaan
geometri antara pengguna dan satelit yang diamati.
prediksi posisi terakhir satelit yang dilransmisikan
kepada pengguna dalam pesan navigasi
bentangan frekuensi
distr'busi amplitudo sinyal sebagai fungsi frekuensi
bagian dari pesan navigasi yang mengandung
informasi sinkronisasi dalam pemindahan kode dari
C/A ke P
lapisan yang terietak 80-120 mil dari permukaan
an kecepatan propagasi dari sebuah sinyal
saal melewati lapisan ionosphere.
130
Kalman's filtering
L-band
Multipath error
Multi-channe! receiver
Navigation message
Navigation data
teknik untuk mengestimasi sebuah keadaan >ang
tidak diketahui dari sebiiah sistem dinamiV linier
yang inemiliki noise tambahan. Mctode ini
menghasilkan solusi optimal dcngan
meminhnalisasi matrik korelasi keadaan kesalahan
(state error correlatkm matrix). Umumnya
digunakan dalam industri untuk aplikasi real-time
scperti sistem kontrol dan sislem radar.
segolongan frekuensi radio dari 390 MHz -- 1550
MHz. Frekuensi gelombang pembawa sinyal GPS
(1277.6 MHz dan 1575.42 MHz) berada dalam
betitangan frekuensi ini.
kesalahan yang disebabkan oieh interferensi sinyal
yang mencapai antena penerima oleh dua atau lebih
jalur yang berbeda, umumnya disebabkan karena
perruntul an sebuah j al ur.
penerima GPS yang dapat seialu melacak lebih dari
sebuah sinyal saleiit.
struktur pesan yang dirancang untuk mernbawa
pesan navigasi.
data yang disediakan di penerima SP3 melalui
sinyal tiap-tiap satelit, yangberisi data-data satelit.
131
Operalional satellite sateiit GPS yang mampu mentransmisikan sinya!
satelit y;ing tengah digunakan.
P-Codc Precision Code, sekuen panjang dari modulasi sua
phasa pseudo-random bineri pada gelombang
pembawa GPS pada 10.23 MHz chip ratc yang
berulang tiap 267 hari. Setiap satu minggu merniliki
kode yang berbeda dan unik, yang selalu direset
pada tiap minggunya.
Precise Positoning System pelayanan GPS yang memberikan akurasi posisi
yang tinggi yang berdasarkan pada dual-fretjuency
P-Code dan tanpa SA
Pseudo-random code sinyal dengan random noise, sangat ruinit telapi
merupakan pengulangan pola angka 1 dan 0.
Pseudorange pengukuran jarak yang berdasarkan pada korelasi
kode satelit yang ditransmisikan dan kode refercnsi
peneriraa, yang belum dikoreksi terhadap errornya
dalatn sinkronisasi antara jam penerima dan jam
transmitter
Sateilite constellation pengaturan satelit di angkasa.
Selective Availability (SA) kebijaksanaan yang diberlakukan oleh Depailemen
Pertahanan Amerika Serikat dengan memberikan
satu sinyal gangguan sehingga informasi yang
dib^rika^tidakterbukauntuk umum. Kebijaksanaan
132
ini dihentikan pada 1 Mei 2000 dan sekarang SA
dinon-aktirkan.
Space segment bagian dari keseluruhan sistem GPS yang berada di
angkasa, contohnya satelit.
Spread Spectrum sistem di mana sinyal yang ditransmisikan
disebarkan melalui sebuah bentangan frekuensi
yang lebih luas dari bandwidth minimunn yang
diperlukan untuk mengirirnkan informasi yang ada.
Hal irvi dilakukan dengan memodulasikannya
dengan kode pseudo-random.
Standard Positioning Scrvice layanan GPS yang disediakan untuk kepenu'ngan
umuin, yang mcnggunakan frekuensi lunggal C/A.
Stalic Positioning penentuan lokasi di mana antena penerima
diasumsikan stasioner terhadap bumi.
User segment bagian dari keseluruhan sistem GPS yang terrnasuk
di dalamnya penerima sinyal GPS.
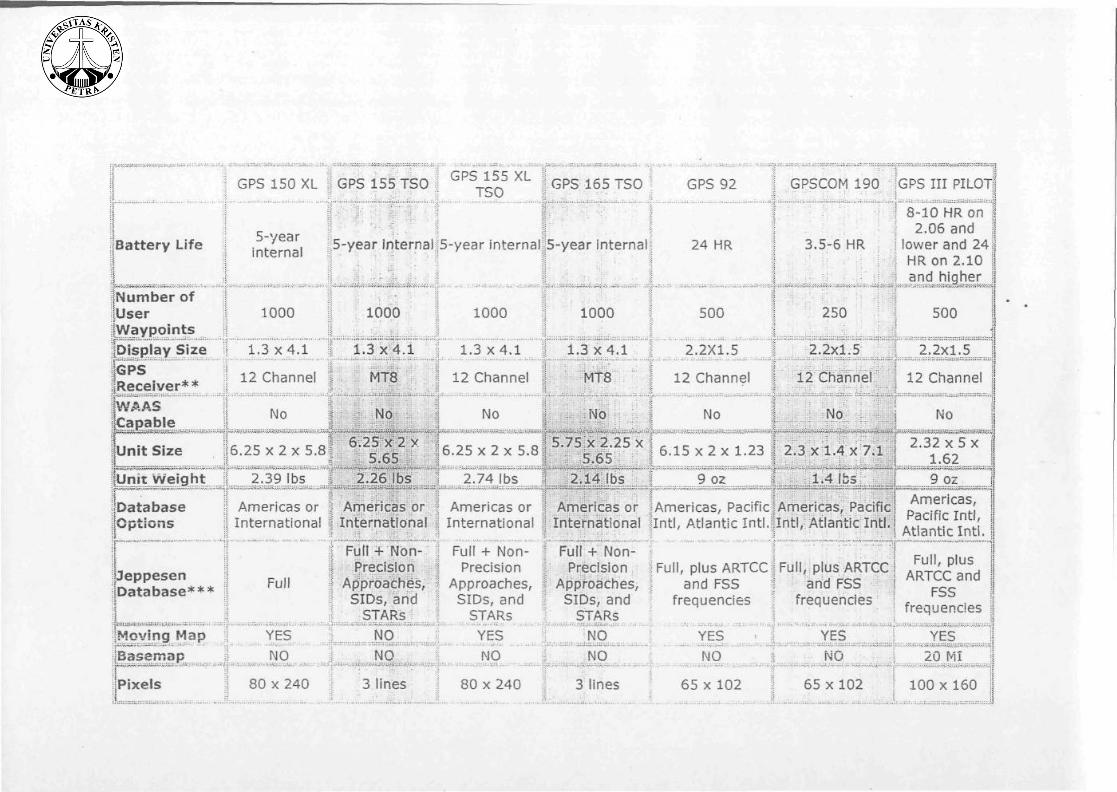
jfBattery Life||
ijNumber ofijUserllWaypojnts
Ipisplay Size
jJGPSi |Receiyer**
JJWAAST|[Capable
junit Size
IfUnit Wejght
patabaseJGptions:!_ ^is
jSJeppesen[ D a t a b a s e * * *
Mov ing Map
GPS 150 XL
5-yearinternal
1000
1.3 x 4.1
12 Channel
No
GPS 155 TSOGPS 155 XL
TSO GPS 165 TSO GPS92 GPSCOM 190
5-year internal i5-year internal 5-year internall 24 HR
6.25 x 2 x 5.8
1000
1.3 x4 .1
MT8
No
6.25 x 2 y5.65
2.26 Ibs
Americas or Amencas orInternationa! International
Full
YES
NO ;
Fult + Non-Precision
Approaches,SIDs, and
STARs
NO
NO
1000
. 1.3x4.1
12 Channel
No
i6.25x2x 5.8
2.74_!bs "J
Americas orInternational
Full + Non-Precision
Approaches,SIDs, and
STARs
YES
NO
500
1.3x4.1 1 2.2X1.5
MT8
5.75 x 2 25 x5 65
2.14 ibs
12 Channel
No
6 . 1 5 x 2 x 1 . 2 3
9'oz""""
3.5-6 HR
250
2.2x1 5
12 Channel
No
2 . 3 x 1 . 4 x 7 . 1
l 4 Ibs
GPS I I I PlLOTf
8-10 HR on I2.06 and |
I lower and 241i HRon 2.10 |
and higher I
Amencas or Amencas, Paofic Amencas,International l l n t l , Atlantic Int l . In t l , Atlantic Int l .
FuN•+' Non-Precision ;
Approaches,SIDs, and
STARs
NO
NO
Full, plus ARTCC|Full,:plUSARTCCand FSS I i artd FSS ••]
freguencies \ frequencies
YES
NO
YES
500
2.2x1.5
12 Channel
No
2.32 X 5 X I
Americas, |Pacific Int l , |
Atlantic In t l . I
Full, plus i!ARTCC and
FSSfrequepcies i!
YES
20 MI
(Pixels 80 x 240 3 lines 80 x 240 3 lines 65 x 102 65 x 102 100 x160
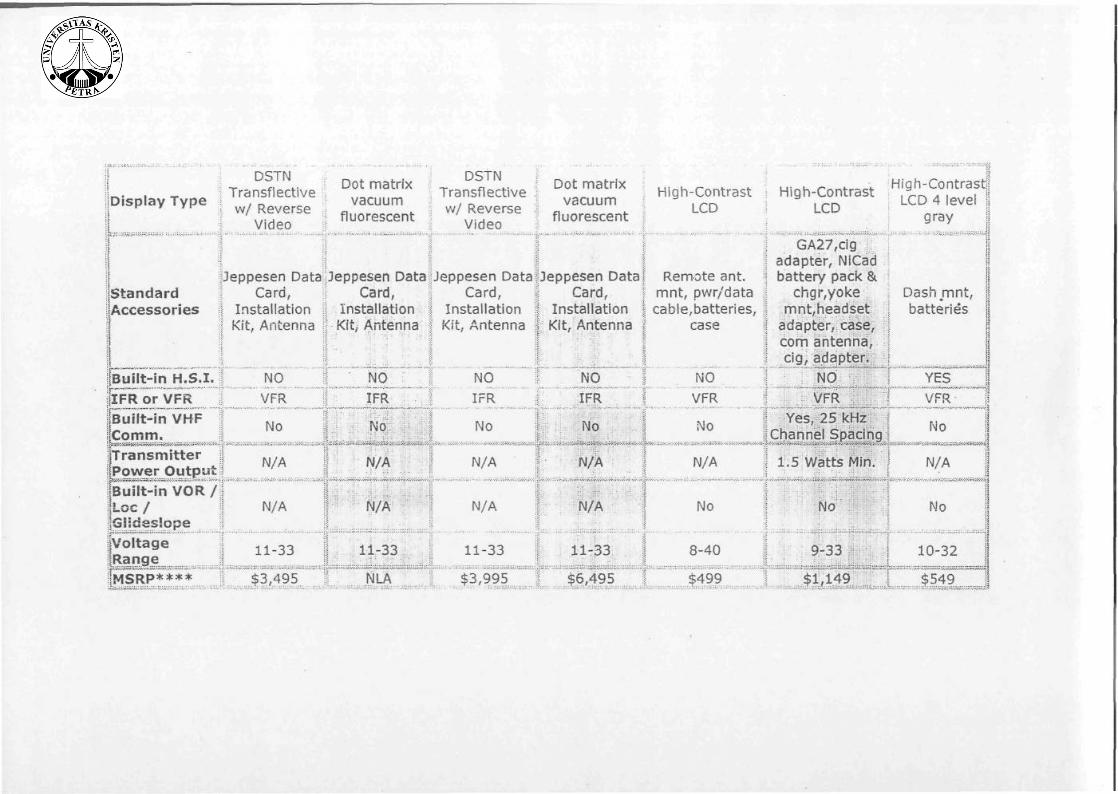
jDisplay Type
jStandardjAccessories
j DSTNJ Transflective| w/ Reverse
Video
Jeppesen DataCard,
InstallationKit, Antenna
Dot matrlxvacuum
fluorescent
DSTNTransflectivew/ Reverse
Video
Dot matrlxvacuum
fluorescent
l High-Contrastj LCD
fBuilt-in H.S.I.JlFR or VFR||iBuilt-in VHFifComm.IJTransmitteriPower OutputilBuiit^in VOR/JLoc /llGlideslopejVoltage![Range
1«
NO
VFR
No
N/A
N/A
11-33
Jeppesen Data Jeppesen DataCard, Card,
Installation 1 InstallationKit, Antenna Kit, Antenna
NOIFR
No
N/A
N/A
11-33
NLA
NOIFR
No
N/A
N/A
11-33
Jeppesen Data| Remote ant.Card, ! mnt, pwr/data
Installation | cable,batteries,Kit, Antenna I case
NOIFR
No
N/A
N/A
11-33
NO
VFR
No
N/A
No
8-40
1499:.
4GA27,cig :. ]
adapter, NiCad :ibattery pack & f
chgr,yoke [mnt,headset
adapter, case,com antenna,cig, adapter,
NOVFR
Yes, 25 kHzChannel Spacing
1.5 Watts Miri.
9-33
$1,149
Dashmnt,batteries
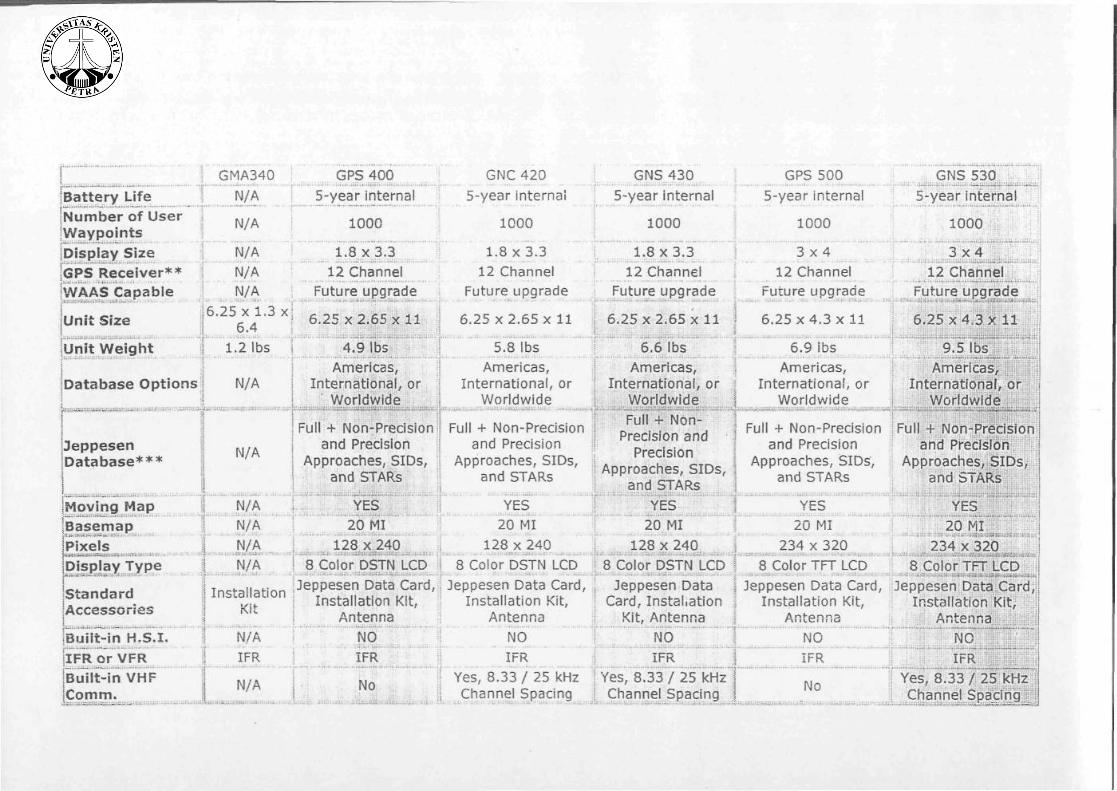
Battery Life !Number of User j'Waypoints >Display Size \'GPS Receiver** |;WAAS Capable j
iUnit Stze \
jllnit Weight j1 :
i jjDatabase Options
GMA340N/A
N/A
N/AN/AN/A
6.25 x 1 36.4
" 1.2 Ibs
N/A
T*
JeppesenDatabase***
iMoving Map'Basemap|Pixe[sIpisplay Type
jstandard|Accessoriasi
JBuiit-in H-S.I.IFR or VFRjBullt-in VHF'Comm.
N/A
".", N/AN/A
* ~ N/AN/A
InstallationKit
N/AIFR
N/A
GPS 400 »5-year intemal )
1000 |
1.8 x 3.3 l12 Channel ;
Future upgrade ^ |
6.25x2.65x11 1JJ
4.9 Ibs jAmencas, j
International, or 'jWorldwide j
Full + Non-Precision jand Precision 'j
Approaches, SIDs, •and STARs
YES20 MI
^ ' " ^ 128 X 240 ^ . ^ i" 8Color"DSJN LCD' !
Jeppesen Data Card, IInstallatlon Kit, 1
Antenna \NO IIFR i|
"1No !
GNC 4205-year internai
1000
1.8x3.312 Channel
Future upgrade
6.25 x2.65x 11
5.8 IbsAmencas,
International, orWorldwide
Full + Non-Precisionand Precision
Approaches, SIDs,and STARs
YES20 MI
128 x 2408 Color DSTN LCcT
Jeppesen Data Card,Installation Kit,
AntennaNOIFR
Yes, 8.33 / 25 kHzChannel Spacing
GNS 4305-year internal
1000
1.8 x 3.3 "12 Channel
Future upgrade
6.25x2.65x11
6.6 IbsAmerlcas,
International, orWorldwideFull + Non-
Precision andPrecision
Approaches, SIDs,and STARs
YES20 MI
128 x 240l 8 Color DSTN LCD, Jeppesen Data
Card, Instal.ationKit, Antenna |
NO " jIFR "" j
Yes, 8.33 / 25 kHz"|J Channel Spacing
GPS 5005-year internal
1000
3 x 412 Channel
Future upgrade
6.25x4.3x11
6.9 !bsAmencas,
International, orWorldwide
Full + Non-Precisionand Precision
Approaches, SIDs,and STARs
r "
'i
_ . J!
GNS 530 " " "5-year interna!
1000
3 x 412 Channel
Fufure upgrade
6.25x4 3x 11
9.5 IDS
Amencas,Internationa!, or
Worldwide
,Full + IMon-Precision| and Precislonj Approaches, SIDs,
and STARs
YES20 MI
^ " 234 x 320""Tcolor TFT LCD ""[Jeppesen Data Card,
Installation Kit,Antenna
NGIFR
] No
YES
{ 20 foli 234 x 320f " 8 ColorTFTLCDijjeppesen Dats Card,
Installation Kit,ii Antenna| NO
ifYes, 8.33 / 25 kHz^ J| Channel Spacing^J
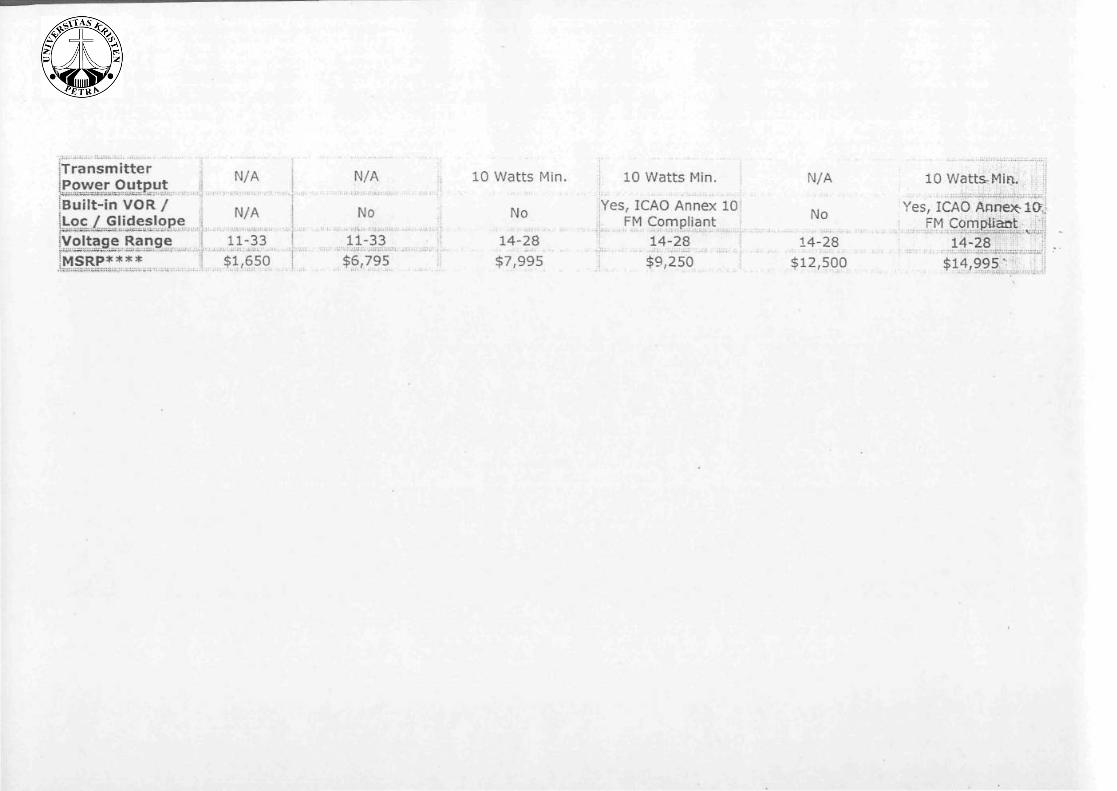
JTransmitterj N/AjPower Output__ | _ t
liuNMn'vOR/ ]"""jLoc / Glideslope ISVoItage.Range..^. i w l 1-33
No .
11-33..$6,795
10 Watts Min.
No
14-28$7,995
;j: 10 Watts Min.
|Yes, ICAO Annex 1II FM CompliantJBI 14-28 ;.....,r. $9,25o"'""7~*" r"
N/A
No
'14-28 '
$12,500
10Watts,Mia.
^Yes, ICAOFM Compliant
14-28$14,995'
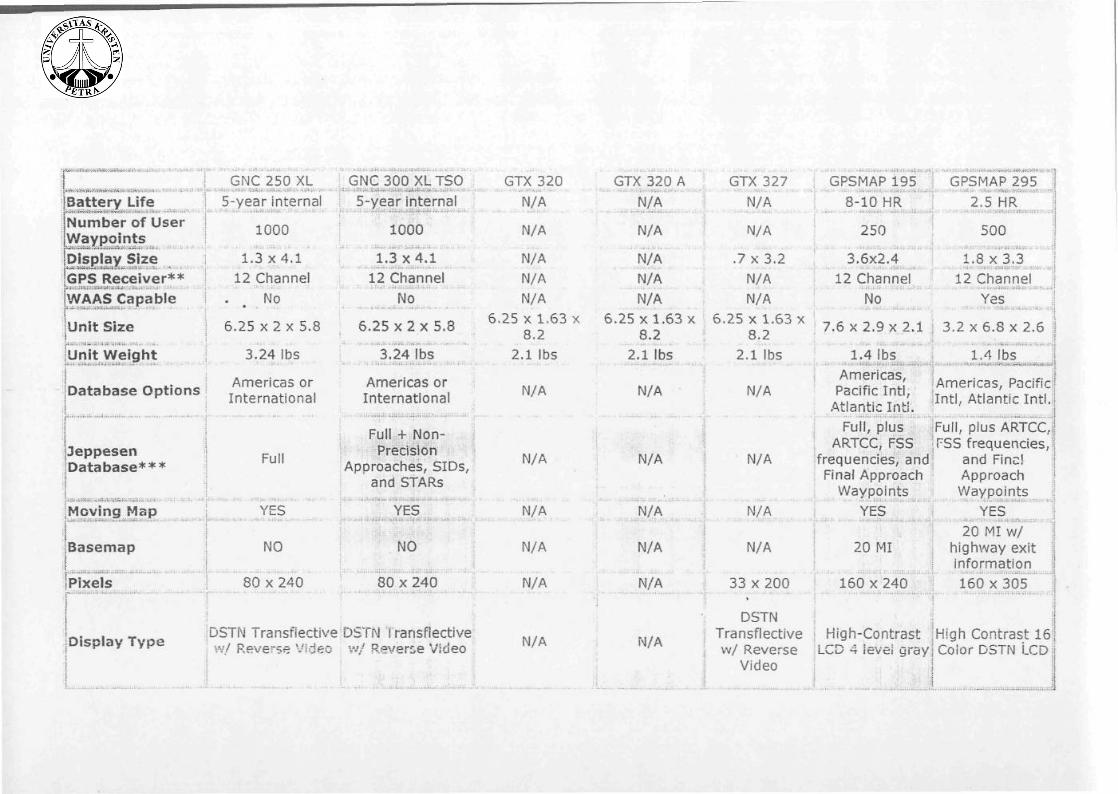
jBattery Life ^ K !
jNumber of User jjWaypoints ^ '
[bisplay Size ^ !
JGPS Receiver**
WAASCapable \\
Unit Size 't '
Unit Weight :
jDatabase Options
peppesenDatabase***
^GNC 250 XJ_^
5-year internal
1000
1.3 X4.1
12 Channel
. m N o
6.25 x 2 x 5.8
3.24 Ibs
Amencas orInternational
Full
Moving Map i YES
[Basemap
Pixels
Display Type
IMO
80 x 240
,^GNC 300 XLJSO}
| 5-year internaj^ ^
\ 1000 ' 3
t 12 Channd
'. „ N o
6.25 x 2 x 5.3
~" 3.24~lbs \1
Americas orInternatlonal
Full + Non- •Precision
Aporoaches, SIDs,and STARs
YES
NO
f " 80x240 " j
"ransnective DSTN ! ransfiectivew'e"?e *->ze~J v.' "e^erse Viueo
GTX 320
N/A
N/A
N/A
N/A
N/A
6 25 x 1 63 X8 2
2.1 Ibs
N/A
N/A
N/A
N/A
N/A
N/A
GTX 320 A | GTX 327
I[ GPSMAP 195 j GPSMAP 295
N/A
N/A
IM/A
N/A j . 7 x 3 2
N/A "f N/A
N/A _l N/A
6.25 x 1.63 x • 6.25 x 1 63 x- 8.2 J 8.2
2.1 Ibs 2 1 Ibs
8-10 HRfcjj
250
" 3.6x2.4 '
12 Channel
No
42.5HR^_ ;
500 |
1.8x3.3*"" ;12 Channel^ f
Yes " < W " ' ,
J 7 . 6 x 2 . 9 x 2 . 1 j 3 . 2 x 6 . 8 x 2 . 6
N/A
N/A
N/A
N/A
N/A
N/A
1.4 Ibs
N/A
N/A
N/A
33 x 200
1.4 Ibsv •.•,-r'J^ A-r v « t < A T̂-
Atlantic Intl. A l l t " A t l a n t l c
Full, plus Full, plus ARTCC,ARTCC, FSS FSS frequencies,
frequencies, and^ and Finc!FinaJ Approach
f Waypoints
J| Transflective\ vv/ReverseI Video
YES
20 MI
160 x 240
ApproachWaypoints
YES T20 MI w/ '
highway exitinformation160 x 305
| High-Contrast H'gh Contrast 16}'LCD 4 ICVCI grayi Coior CSTN LCDi'
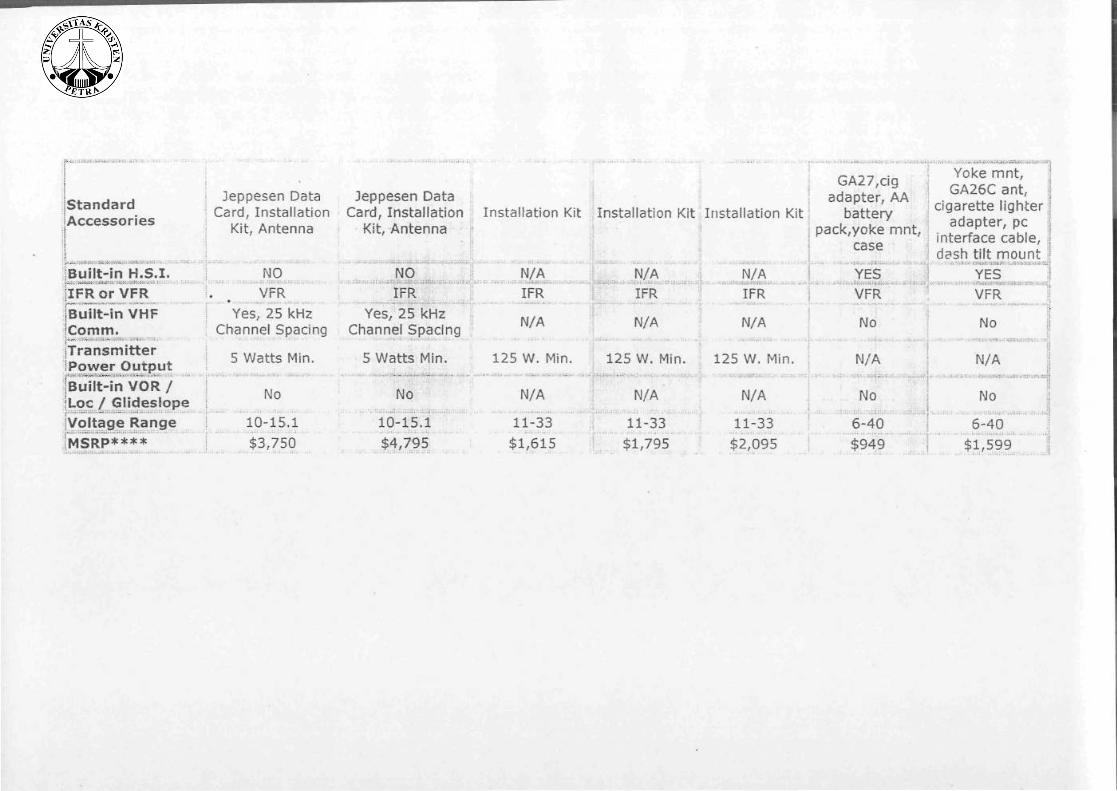
rSStandardAccessories
Built-in H.S.I.'iFRorVFR™Built-in VHF
!Comm.TransmitterPower OutputBuilt-in VOR /'Loc / GlideslopeVoltage RangeMSRP** * *
Jeppesen DataCard, Installation
Kit, Antenna
NO "
Yes, 25 kHzChannel Spacing
5 Watts Min.
No
10-15.1
" $3,750
Jeppesen DataCard, Installation
Kit, Antenna
NO'lFR, 2 5 kHz
Channel Spacing
5 Watts Min.
No
10-15.1$4,795
" * •*"" * "* • •" - r — — **• "***rt j ! GA27,cig! t | adapter, AA
InstaHation Kit >Installation Kit'lnstallation Kit | battery; I j pack,yoke mnt,
l
N/AIFR."
N/A
125 W. Min.
N/A
11-33$1,615
JN/A .
N/A
125 W. Min.
N/A
11-33
$1,795
N/A
IFR
N/A
125 W. Min.
N/A
11-33$2,095
case
YESVFR
No
N/A
No
6-40$949
Yoke mnt, jGA26C ant, >,
cigarette lighter 'adapter, pc !
interface cable, ;dash tilt mount
! VFR
< No
; N/A
No
6-40 "$1,599
JURUSAN TEKNIK ELEKTROFAKULTAS TEKNOLOGI INDUSTRJUNTVERSITAS KRISTEN PE'HU
Nama
NRP
USULAN TUGAS AKIIIR
: Thcresia
:23497069
Bidang Studi : Elektronika
Judul Tugas Akhir : STUDITENTANG GLOBAL POSITIONING SYSTEM
(OPS)
Pcmbimbing I : Ir. Murtiyanto Santoso, M.Sc
Peinbimbing II : Aditya Umbu Tana Amah, ST.
Dilaksanakan : Sernoster Genap (2001/2002)
Siirabaya, 1 Fcbmari 2002
Ymig incuuusulkan,
'\V\Tlwresia
Koordiriator Tugas Akhir
Mengetahui,
Pembimbing I Pembirnbing IJ
fyIr. Muitiy'anto Santpso, M.Sc. Ir, Murtfyanto Saiitoaot M.Sc
U S U L A N ' i r - G A S A k l l l l l
1. .Judul TU^JJS Akh i r
Studi tentang Cilobal Positioning S\ stcin (OI'Si
2. L a l a r IK'lakan^ Masalal i
Dunia leknologi tolah bcrkembang scmakin pcvit HCLMUI JULU pada sistcin
navigasi Navigasi konvensional m^iu'iuin.iknn [viunjuk pct.i sebagai
peeliinjuk jalan. Tctapt peta komensional l ianw dapat meruiniukkan lalan
ssecara garis besar, tetapi lidak dapat mcngctalun di mana posisi kua
sesungguhnya berada Misalnya, apabila kita tcrsc^ai doru'an mclilui pota.
kita dapat mengclahui di daerah mana kita bcmda, tciapi tidak dapai
mengetahui posisi kua sccara tepai. Saat 1111 kcmanian \uknoUn:i niainpvi
melengkapi l'ungsi pongiumaan pcta koincii.sional. diiiniKinu dciiL'an saiu alai
yang discl'nil deiK'an (ilobal Positionuii! S\stcin ( d l ' S i Doni'an luniu.in d l ' S
dapal dikclaluii di koordinnt inana dia Ivrada kc aiali niana |aKin \.IML' h.wi.v
dilcmpnh untuk mciKapai salu nnk iujuan, bcrdas.nkan poia \,\i\[i icrrckain
pada GPS yang tciscdia Bahkan dongan scmakin K'ikcmb.iiii.'in.i tcknolopi
yang ada, tcknologi CiPS mcmungkinkan icrscdiaina pcmnjuk mcngcinu
sejumlah bank, ruinah makan, dan jalan icrjK'ndL-k sany dapai ditcmpuh
berdasarkan pada jalan-jalan bypass >ang ada, bahkan inturuuisi mcngcnai
kcinacctan.
3. Pcrumusan Masalah
Dari waktu ko waktu tcknologi informasi scinakiri I v ikcmlu iu ' u ikup | vv i t
unluk mengantisipasi perkembangan lajnan II.il mi t a l iha t d.m b a n \ a k n \ a
penenuian-pcnemuan baru yang m u n a i l . baik dalam dunw leltAomimikasi
maupun informatika. Salah satunya, yailu Global l 'nsuionmu S\sicin (Cil'S)
yang sccara gans bcsar bcrguna dalam sislcm na\ ijjasi Saat ini leknoloui Gl 'S
merupakan teknologi baru, yang beliim cukup populci di Indonesia Studi ini
dimaksuclkan untuk lcbih mempopulerkan pcngyunaan GPS di kalangan
masyarakat awam, menyingat teknologi GI'S mi ban \ak mcmbantu
ponvL'dcrhanaan sistom navigasi. Tctapi , kerulala vanj! ada. sunibor-sumbcr
lontang GPS masili tcrcorai bcrai, tidak ada \ a m ' iiK-iupakan ^atu kcsatuan
utuh Studi dan pcnyusunan ttiL'as .ikhir im dnn.tkvudkan untuk hcrusaha
menyaUikan scmua suniber-suinbcr \a(U'. ada mcii|;uli s.itu kc^aiuan \ anu uiuh,
schini'ua danat dibaca dan dnnciiiiciti doniuu nnulah MclaUn siiidi dan
ponyusunan tugas rkhir ini. dihaiapkan. dapat incnicnulii kclniliihan
masyarakat akan pongctahuan dan dan sisicm [viu'opotasinn ( i l 'S tanpa harus
iiionj.'umpulkan banyak uirormasi dan bans.ik suinbor \aiii1. kTi-ci.ii-bcrai
Sclimgga GPS akan scmakin populer dan bansak \aiij.1 mcngcr.al tna, sohingga
leknologi terscbut akan scmakin bermantaat d.ihun hidup kiia.
4. Tujuan Tugas Akhir
'l'ujuan yfing ingin dicapai ineialui Uigas akhit im adalali
• Mcmpclajan sistcm-sistem GiJS \aiiu s.ial im sndali acia
• Mcmbandinukan sistcm GIJS sane ada dan oijjunakan saai mi
• Monjadikan sludi ini scbagai pegangan nialusiswa, khusiiMiNa malusisua
Universilas Kristcn Petra, dalam mcmpdaian sistcni (il\S
5. Ruan^ Lingkup
Btiku Tugas Akhir ini monjelaskan tontani! koM'.op-konsep da*ar (il'S. tcknik
perhitungan posisi yang digunakan dalam dl 'S. blok diagiam sisioni (JPS
serta contoh-contoh usulan aplikasi penggunaan GPS
Susunan kerangka studi literature tcntang Global Positionini; Sysicni
STl!l)l TKNTANC; C.LOBAl, POSITIONINCJ S\ S H . M (CIPS)
I. Pcndalniluan
1. Mal-hal yang bcrkaitan dcngan pcncntuan posisi2. Kompas3 Arah bmiang dan matahari ^cbayai pcininiuk arah4. I'eta scbagai alat bantu5. Alat-alat navigasi dan borbagai K'nisn\a(v ScjarahGPS
II. Topik1 . l ' L ' r h i l u n g a i i p o s i s i s i i a l u t c i n p . i l b c i d . i - a i k a n l i c l n i . i p . i u i i k
rctorcnsi
2. Orbit-orbit satelit dan orbit yang digunakan olch (il'S3. Macam-macam satclit dan satelit yang di^undkan olch Cil'S4. Cara kerja GPS5. Data Komunikasi
5.1. Kccepatan transfcr5.2. Fonnat data5.3. Protokol5.4. Bit Rate
III. Sistcm Penentuan Posisi Globa!!. Jonis GPS bcrdasar pcngguiui
1.1 Militcr1.2 UiiMim
2. Data-dataGPS3. Contoh-contoh GPS4. Pcrbandmgan Data antar GPS
IV. l'erkembanyan GPS dan aphkasmsa1. DiHorensialGPS(DGPS)2. Aplikasi GPS pada telcfon sclular (ponscl)3. Aplikasi CiPS pada Personal Digital Assisiani (PDA)
V. Kesimpulan1. Kcsimpulan2. Saran
Lampiian Dal'tar
6. Tinjaunn Pustaka
Scjak awal tahun 1960, bcrbagai badan di Amcrika Scnkat mcmpunyai
program navigasi dcngan mcnggimakan salclu. aniata lam proiT.im 1 K\NSI I"
yang disponsori olch John Hopkins Applicd Research U'boiatorv program
TIMATION (Timc Navigation) yanu disptuison olcli US N.iw d.in sistcm
G21B yang disponson olcli USA1: Program IKANSII diopciasikati pada
taluin 1964 clan dijadwalkan dilniygalkan p;ula laluin 19lJf> PnK'tam im
duuiiiakan untuk |vknanan na\igasi bai'i k^iulai.i.in saiK' Ivulinamikn
rcndah, scpcrii kapal latit TIMAI'ICiN adalali proiiam \atu' dibuat untuk
melanjutkan program navigasi dna dimcnsi (U««)rdmai Imian:; dan ki>ordm.u
bujur). USAF (Umted States Air l-orcci nicinpHnyai konscp utuuk
monguunakan navigasi dcngan koordinat iiea dnnonsi (liniang, buiui dan
kctinggian) yang discbut dcngan sistcm G2 i B
GPS adalah alat untuk menunjukkan posisi saiij: boidasaikan gclombaiu'
ladio di angkasa clan sibtcm pcrjalaiKm \sakm fVnt'.ui GPS, d.ip<it Ji|K'ioK.'h
infoimasi borupa posisi, koccpalan dan ssakhi saiii' akurai pada bcibagai
sistcm navigasi di darat, laut, ud.ira dan angkasa GI'S lordin dari tiua bagian
utama (scgment) yaitu space scgmont, control scgmcnt, dan uscr segnicnt
• Spacc segment.
GPS ccrdiri dari 24 salclit komunikasi \ ang mengorbu pada bwni dcngan
orbil semi sinkion (kira-kira 12 jam) Saicln toisdmt ma-.L-mp.m 6 orbu
dengan 4 satelit pada tiap orbi tma. Daerah oibil mempuinai sudut
inklinasi 55 rolatil' icrhadap garis ccjuaior Inimi Saicln mcmpumai
kelinggian orbit kira-kira 20.200 km di aias p a m u U a n bumi Sak-ht Cil^
dalam mcngitari orbilnya kira-kira membumlikan \\aktu I 1 |ain 5S mcnit
Scjak bumi beroiasi di bawah salclit, niaka s;iichi niclcuati jalann\a di
atas permukaan bumi sccara beruhinu sciiap 1 ^ iam >('< monii kure tu
s a i c l i t n K ' n c m p a i i p o s i s n \ a m a s i i i i ' - i n a s i i i r d i J a c r h a n i h i i m . i m . i k . i
e m p a t a t a u l c b i h s a t c h t d a p a t d i t c n m a h a m p i r d i ^ c i u i p l o k a s i b u n u S a l c l i l
m e n t r a n s i n i s i k a i i s n n a l p a t l a d u a I ) b a i u l t ' i c k u c n - i \ . i i l t i I u i k l i l 1 i p . i d . t
1575,42 M l l / dan 1 n\k2 (12) -pada l?2'\<i \ t l l/ S imal \ . l c l u icivclun
diiratisniisikan mcnygunakan icknik pcn\cb.uan sfvkinmi, dciu'an dtia
kodc yut>g bcrbcda scbagai jx.%nNobarann\a, 102.^ Mh/ sch.\i',.n
Coarsc/Acciuisition Codc (C/A Ci)dc) pada 1 I dan ld.2^ Mh/ I'ICCISHHI
Codc (Pcode) pada Ll dan 1-2. C'A Codc dan l' t 'odo dapai diuunakan
untuk analisa jarak antara satclit dan pcnenma (iPS
« Control Scgmcnt
Pengontro! GPS ini terdiri dari sebuah stasiun pcngontrol utama (Muster
Control Station/'MCS), stasioun monitor, dan giound antcnas Bagian
kontrol moliputi PrclaiiRch Compatibility Slalion dan kcniampuan back up
MCS. MCS mcrupakan lasilitas pemroscsan utama unluk bagian
|5cngontrol dan bcrtanggung jawab uniuk mengawaM scrta mirmumr letak
satclit. MCS digunakan untuk mengontrol gcrak satdil i t , konfigurasi ulang
pcralatan satclil, mempcrbaharui pesan na\igasi \ang ditransmisikan
satclit sccaia rcguler, bcrbagai macani pengawasan kela^akan satclil scrla
menjaga aktivitas satclit. Komunikusi MCS, Momtoimg Stanon dan (iroun
Anlcnasdi lakukan inclalui US Dci'cnd Saiclhic (/oiiunuiiic.itn'n iDSCS)
• User Scgmciit.
Bagian pengguna GPS merupakan pLMicruna (iPS Hii M-ndin. yang
dirancang untnk mcncrima, mcndcoodc dan incmpioscs snnal s.itcln yang
diterinia. Poncrinia GPS dapat bcvariasi, tcigantung uari bciimk dosain dan
fungsinya, lcrutaina dalam aplikasi nasiuaM scjvni nK-iH.innk.iu posisi
yang akural, pengtikuran waktu, sur\c> d.m vmUik rcl'crciv,i kchnjigian
l'uucrima (i l 'S mciigkonvcisikan sm\ til ^aiclii mcniadi poMM, k t w p a i a n
dan pcngiikuran waklu. Dipcilukan cmp.ii saiolii tmtuk mciti'Jniiini; -1
dimensi posisi ( X , Y , / ) dan w.iktu Navigasi Jalam si.sicni koonlin.u tiiia
dimcnsi mcrupakan fungsi dasar dan UI'S l 'cncnnia na\ii;asi 1111
digiinakan untuk pcsawal udara, kapal laui, kcndaiaan daiai dan pcngiiuiui
individual.
Layanan GPS ini mcmpunyai dua lasinui.s
• Prccise Positioning Syslcm.
Adalah pclayanan untuk mcnunjukkan posisi, kcccpalan, dan wakiu \ ang
akurat, yang hanya lcrscdia untuk kc|Viluan kluiMis. biasansa
diperuntukkati unluk pihak pemenntah Amcnka Scnkai
• Standart Positioning Systcm.
Pclayanan ini diperunUikkan untuk \sarga sipil l 'clasanan im adalah )cnis
pelayanan GPS \ ang tidak terlalu akurat 1-asiliias im lcbtl', dikluisuskar
untuk digunakan masyarakat sipil meski ndak mc:mtiip Vcmutu'kmar.
digunakan olch pihak militer
7. Metodologi Pencl i t ian
1. Studi hteralur, mcliputi:
• Mempclajan dasar-dasar GPS
• Mcnipclajan pcimgunaan Cil'S
• Mcinpclajati aplikasi GPS
2 Pengumpulan Hata, meliputi
• Penguinpulaii Data Sposil'ikasi (iPS N.IMS/ .id.i
• l 'cngumpiilan Data pcrbandingan dan (i l 'S \ a n r tcrsodia
3. Analisa dala.
Pada laliap ini, dilakuksn analisa dan S[x;sifikasi (IPS dan data
perbandingan GPS yang ada, kclcbihan dan kckuiangan dari iiap-Uap
spesifikasi data yang didapat.
4. Kesimpulan
Penankan kcsinipulan dari scmua sludi, pcngumpulan dala dan spcsilikasi
yang lolah dilakukan.
8. Relevan.si
Dengan studi int, diharapkan agar dapat mcngeiii maigcnai pvnggviiuan (Sl'S
serta aplikasinya dalam keseharian, dan dapat inemanfaatkan tcknologi yang
ada scmak-simal mungkin.
9. .Jmhvnl kcyiatan
Jonis Kegiaian Bulan I I Hulan 11 I liuUn l \ ' Hul.in \ I
Sludi Litcratur( | _ __ - t
Pcngumpulay Data
Analisa t)ala
Kesimpulan
Pcnulisan l-aporan
.L.
l !_._. _l
10. Daitai* Tustakit
• Prayitno, Joko l lcrman, rcn^uiniau < iI'S / \ u 7 < y \ 7
i'cmm/uk Arah ilulinn Fcr/a/anan, DKP ('X I-/I I 0-11 386
• luip://w\vw colorado cdii/gcograpliy/ycratl
• hup://w\vw.ioial tclc.com
• hup7/w\v\v.pcrmancnt.com
\ctunia:
http7/wvv\v l'ool coin





























