Embed Size (px)
Citation preview

Journal of Statistical Planning andInference 110 (2003) 159–177
www.elsevier.com/locate/jspi
The &ower intersection problem for Kirkman triple systems
Yanxun Changa ;1, Giovanni Lo Farob;∗; 2aDepartment of Mathematics, Northern Jiaotong University, Beijing 100044,
People’s Republic of ChinabDepartment of Mathematics, University of Messina, Contrada Papardo, 31-98166 Sant’ Agata,
Messina, Italy
Received 26 January 1999; received in revised form 20 November 2000; accepted 20 August 2001
Abstract
The ,ower at a point x in a Steiner triple system (X;B) is the set of all triples containingx. Denote by I∗R [r] the set of all integers k such that there exists a pair of KTS(2r + 1) havingk + r triples in common, r of them being the triples of a common &ower. In this article wedetermine the set I∗R [r] for any positive integer r ≡ 1 (mod 3) (only nine cases are left unde-cided for r=7; 13; 16; 19), and establish that I∗R [r] = J [r] for r ≡ 1 (mod 3) and r¿ 22 whereJ [r] = {0; 1; : : : ; 2r(r − 1)=3 − 6; 2r(r − 1)=3 − 4; 2r(r − 1)=3}. c© 2001 Elsevier Science B.V.All rights reserved.
Keywords: Kirkman triple system; Frame; Flower intersection
1. Introduction
A Steiner triple system of order v (brie&y STS(v)) is a pair (X;B) where X is av-set and B is a collection of 3-subset of X (called triple) such that every pair ofdistinct elements of X belongs to exactly one triple of B.A Kirkman triple system of order v (brie&y KTS(v)) is a Steiner triple system
of order v (X;B) together with a partition R of the set of triples B into subsetsR1; R2; : : : ; Rn called parallel classes such that each Ri (i=1; 2; : : : ; n) is a partition of X .It is well known that a KTS(v) exists if and only if v ≡ 3 (mod 6) (see Ray-Chaudhuriand Wilson, 1971). Chang and Lo Faro (1999) determined the pairs (k; v) for whichthere exists a pair of Kirkman triple systems on the same v-set having k triples incommon with only 10 pairs of (k; v) undecided.
∗ Corresponding author.E-mail addresses: [email protected] (Y. Chang), [email protected] (G. Lo Faro).1 Supported in part by NSFC grant No. 19701002 and Huo Yingdong Foundation.2 Supported by M.U.R.S.T. and C.N.R.(G.N.S.A.G.A.).
0378-3758/01/$ - see front matter c© 2001 Elsevier Science B.V. All rights reserved.PII: S0378 -3758(01)00282 -8

160 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
The ,ower at a point x in a Steiner triple system (X;B) is the set of all triples con-taining x. Two Steiner triple systems of order v (X;B1) and (X;B2) with the common&ower at point x are said to intersect in k triples provided |B1 ∩B2|= k + (v− 1)=2.Denote by I∗[r] (or I∗R [r]) the set of all integers k such that there exists a pair of
STS(2r + 1) (or KTS(2r + 1)) having k + r triples in common, r of them being thetriples of a common &ower. For each non-negative integer t, let S(t) denote the set ofall non-negative integers less than or equal to t, with the exceptions of t−1; t−2; t−3and t−5. For the general case, let J [r] = S(2r(r−1)=3). HoJman and Lindner (1987)completely solved the &ower intersection problem for Steiner triple systems and provedthat I∗[r] = J [r] for any r ≡ 0; 1 (mod 3) except I∗[4]= J [4]\{1; 4}.For Kirkman triple system of order v, clearly r=(v − 1)=2 ≡ 1 (mod 3). We call
such a non-negative r admissible. From Lindner and Rosa (1975), it is obvious to seethat I∗R [r] ⊆ J [r]. Trivially, I∗R [1]= J [1]= {0}. In this article we will determine theset of I∗R [r] for any admissible r ≡ 1 (mod 3) and r¿ 22. For 46 r6 19, only ninecases are left undecided.
2. Recursive constructions
In this section we give several recursive constructions for the &ower intersections ofKirkman triple systems. The concept of GDDs and frames play an important role inthese constructions. Let us give them a formal deKnition.Let X be a Knite set containing v points, G a family of distinct subsets of X called
groups which partition X , and A a collection of subsets of X called blocks. Let K bea set of positive integers. A design (X;G;A) is called a group divisible design (GDD)K-GDD if
(i) {|B|: B∈A} ⊆ K .(ii) |G ∩ B|6 1 for every G ∈G and every B∈A.(iii) Every pair of points from distinct groups occurs in exactly one block of A.
If G contains t1 groups of size m1; t2 groups of size m2; : : : ; and ts groups of sizems, we call m
t11m
t22 : : : m
tss the group type (or type) of the GDD. A K-GDD with group
type 1v is actually a pairwise balanced design B(K; 1; v) (or (v; K; 1)-PBD). We usuallywrite {k}-GDD as k-GDD for brevity.A holey parallel class of a GDD (X;G;A) is a set of blocks P which forms a
partition of X \G, for some G ∈G. The group G is called the hole corresponding to P.A K-frame is a K-GDD (X;G;A) in which the block set can be partitioned into
holey parallel classes. We refer to a 3-frame as a Kirkman frame.The ,ower at a point x in a k-frame (X;G;A) is the set of all blocks in A containing
x. Two k-frames (X;G;A) and (X;G;B) with the common &ower at point x are saidto intersect in k other triples provided |A∩B|= k + r; r of them being the blocks ofa common &ower. Two k-frames on the same set and with the same groups (X;G;A)and (X;G;B) are said to intersect in l blocks provided |A ∩B|= l.

Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 161
Let (X;T) be a KTS(v) and write T=Fx ∪B, where Fx is the &ower at the pointx. Let G= {{a; b}: {a; b; x}∈Fx}. Then, (X \{x};G;B) is a Kirkman frame of type 2rwhere r=(v− 1)=2. On the other hand, let (X;G;B) be a Kirkman frame of type 2r ,and F∞= {{a; b;∞}: {a; b}∈G}. Then, (X ∪ {∞};B ∪ F∞) is a KTS(2r + 1) with a&ower at ∞. It is easy to see that k ∈ I∗R [r] iJ there exists a pair of Kirkman frameswith type 2r having k common triples.Apply Fundamental frames Construction in Stinson (1991) to obtain similar con-
structions as follows.
Theorem 2.1 (Fundamental Construction; Chang and Lo Faro, 1999). Suppose that(X;G;A) is a GDD; and let ! :X → Z+ ∪{0} be a weight function. For every blockA∈A; suppose that there is a pair of k-frames of type {!(x): x∈A} with bA blocksin common. Then; there exists a pair of k-frames of type {∑x∈G!(x): G ∈G} having∑
A∈AbA blocks in common.
Theorem 2.2. Suppose that (X;G;A) is a GDD; and let ! :X → Z+ ∪ {0} be aweight function. For every x∈X; let Yx be a set of cardinality !(x); and for anyZ ⊆ X; de@ne YZ =
⋃x∈ZYx. Now if z is a @xed point of Yf where f∈X; and for
every block f∈A∈A; suppose that there is a pair of k-frames of type {!(x): x∈A}with the common ,ower at z ∈Yf intersecting in bA other blocks; and for every blockf ∈ A∈A; suppose that there is a pair of k-frames of type {!(x): x∈A} with bAcommon blocks. Then; there exists a pair of k-frames of type {∑x∈G!(x): G ∈G}with the common ,ower at z intersecting in
∑A∈AbA other blocks.
Proof. For every block f∈A∈A, we have a pair of k-frames (YA; {Yx: x∈A};BA)and (YA; {Yx: x∈A};CA) with the common &ower at z ∈Yf, and |BA ∩ CA|= bA +rA; rA of them being the blocks of the common &ower. Further, for every blockf ∈ A∈A, we have a pair of k-frames (YA; {Yx: x∈A};BA) and (YA; {Yx: x∈A};CA)with |BA ∩ CA|= bA. Then it is easy to see that (YX ; {YG: G ∈G};⋃A∈ABA) and(YX ; {YG: G ∈G};⋃A∈ACA) are k-frames (this is in fact Fundamental frames Con-struction; see Stinson, 1991). From the construction and the assumption, it is trivial tosee that |BA ∩CB|=0 if A =B, or bA if f ∈ A=B, or bA+ rA if f∈A=B. Then, thenewly obtained k-frames have the same &ower at z, and they have∣∣∣∣
( ⋃A∈A
BA
)∩( ⋃A∈A
CA
)∣∣∣∣= ∑A∈A
bA +∑
f∈A∈A
rA
common blocks,∑
f∈A∈ArA of them being the blocks of the common &ower at z. Thiscompletes the proof.
We Kll the holes of suitable frames to construct Kirkman triple systems with acommon &ower.
Theorem 2.3 (Filling in Holes Construction). Let a¿ 0 and suppose that there aretwo Kirkman frames of type {t1; t2; : : : ; tn} with the common ,ower at z in the nth

162 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
group; which intersect in b other triples. For 16 i6 n− 1; suppose that there existsa pair of KTS(ti + a) containing the same sub-KTS(a) with bi common triples; andsuppose there exists a pair of KTS(tn + a) with the common ,ower at z intersectingin bn other triples. Then; there exists a pair of KTS(
∑16i6nti + a) with the common
,ower at z intersecting in b+∑16i6nbi − (n− 1)a(a− 1)=6 other triples.
Proof. Let (X;G;A) and (X;G;B) be two Kirkman frames of type {t1; t2; : : : ; tn}with |A ∩ B|= b + R; R of them being the triples of the common &ower at z. LetG= {G1; G2; : : : ; Gn} with |Gi|= ti; 16 i6 n, and let Y be a set of cardinality a suchthat X ∩ Y = ∅.For 16 i6 n− 1, we have two KTS(ti + a) (Gi ∪ Y;Ci) and (Gi ∪ Y;Di) containing
the same sub-KTS(a) (Y;Ei), and with |Ci ∩Di|= bi. By the assumption, we also havetwo KTS(tn + a) (Gn ∪ Y;Cn) and (Gn ∪ Y;Dn) with the common &ower at z, and|Cn ∩Dn|= bn+ r; r of them being the triples of the common &ower. It is easy to seethat (X ∪ Y;A∪ (⋃16i6n−1(Ci\Ei))∪Cn) and (X ∪ Y;B ∪ (⋃16i6n−1(Di\Ei))∪Dn)are two KTS(
∑16i6nti + a) with the same &ower at z (this is in fact Filling in Holes
Construction; see Stinson, 1991). Obviously, the two new KTSs have
|A ∩B|+ ∑16i6n−1
|(Ci\Ei) ∩ (Di\Ei)|+ |Cn ∩Dn|
= b+∑
16i6nbi − (n− 1)a(a− 1)6
+ (R+ r)
common triples, R + r of them being the triples of the common &ower at z. Thiscompletes the proof.
Theorem 2.4. Suppose that there is a pair of Kirkman frames of type {t1; t2; : : : ; tn}with b common triples. For 16 i6 n; suppose that there exists a pair of Kirkmanframes of type 2ti =2+1 with bi common triples. Then; there exists a pair of Kirk-man frames of type 2t+1 having b+
∑16i6nbi common triples where t=
∑16i6nti=2.
Furthermore; we have b+∑16i6nbi ∈ I∗R [t + 1].
Proof. Let (X;G;A) and (X;G;B) be two Kirkman frames of type {t1; t2; : : : ; tn} with|A ∩B|= b. Let G= {G1; G2; : : : ; Gn} with |Gi|= ti; 16 i6 n, and let Y = {a; b} beany a 2-set such that X ∩ Y = ∅.For 16 i6 n, we have a pair of Kirkman frames (Gi ∪ Y;Gi ∪ Y;Ci) and (Gi ∪
Y;Gi ∪Y;Di) of type 2ti =2+1 with |Ci ∩Di|= bi where Gi is a partition of Gi. It is easyto see that (X ∪Y; (⋃16i6nGi)∪Y;A∪ (⋃16i6nCi)) and (X ∪Y; (⋃16i6nGi)∪Y;B∪(⋃16i6nDi)) are two Kirkman frames of type 2t+1 (see Stinson (1991) for details).
Obviously, the two newly Kirkman frames have
|A ∩B|+ ∑16i6n
|(Ci ∩Di|= b+∑
16i6nbi
common triples. Hence, b+∑16i6nbi ∈ I∗R [t + 1].

Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 163
3. The set I∗R [r] for small order r
Lemma 3.1. I∗R [4]= {0; 2; 8}.
Proof. By Lemma 4.1 in Chang and Lo Faro (1999), there exists a pair Kirkmanframes of type 24 having k triples in common where k ∈{0; 2; 8}. Then, {0; 2; 8} ⊆I∗R [4]. By HoJman and Lindner (1987), I
∗R [4] ⊆ I∗[4]= {0; 2; 8}. Hence, I∗R [4]=
I∗[4]= {0; 2; 8}.
Lemma 3.2. 2r(r−1)=3−2r+2; 2r(r−1)=3∈ I∗R [r] for any r ≡ 1 (mod 3) and r¿ 4.
Proof. Let (X;B) be any KTS(2r+1) for r ≡ 1 (mod 3). Then, |B∩B|=2r(r−1)=3+rwith the common &ower at any point, and hence 2r(r − 1)=3∈ I∗R [r].Select any two distinct elements a and b of X , let c be the point of X such that
{a; b; c}∈B. It is readily checked that |(a b)B∩B|=2r(r− 1)=3− r+2; (X; (a b)B)and (X;B) have the common &ower at c and hence 2r(r − 1)=3− 2r + 2∈ I∗R [r].
Let I15 = {1; 2; : : : ; 15}. A list of all 80 non-isomorphism STS(15) on I15 can befound in Mathon et al. (1983). Four of them give rise to at least one KTS(15), namelyNos. 1, 7, 19 and 61 which are listed in the appendix. Let (#1), (#7), (#19) and (#61)denote the set of triples corresponding to Nos. 1, 7, 19 and 61, respectively. If # is apermutation on I15, let #(#i)= {#B: B∈ (#i)} for i=1; 7; 19; 61.
Lemma 3.3. 17; 20; 24∈ I∗R [7].
Proof. Denote by B the set of triples obtained after replacing the triples {1; 4; 5};{1; 6; 7}, {2; 4; 6}; {2; 5; 7} in (#19) by {1; 4; 6}; {1; 5; 7}; {2; 4; 5}; {2; 6; 7}. Then, Bis also KTS(15), which has a parallel class solution as below:
1 2 3 1 4 6 1 5 7 1 8 9 1 10 11 1 12 13 1 14 154 8 15 2 9 11 2 8 10 2 13 15 2 12 14 2 4 5 2 6 75 11 14 3 10 13 3 11 15 3 5 6 3 4 7 3 9 14 3 8 126 10 12 5 12 15 4 9 12 4 10 14 5 8 13 6 8 11 4 11 137 9 13 7 8 14 6 13 14 7 11 12 6 9 15 7 10 15 5 9 10
Clearly, |B∩(#19)|=31 with the common &ower at any point of {3; 8; 9; : : : ; 15} andhence 24∈ I∗R [7]. It is readily checked that |[(1 2)B] ∩ (#19)|=27 with the common&ower at any point of {3; 4; 5; 6; 7} and hence 20∈ I∗R [7].Consider the permutation: #=(1 2)(3 4)(9 10)(12 15). Clearly, |B ∩ #(#19)|=24,
with the common &ower at point 8 or 14 and so 17∈ I∗R [7].
Lemma 3.4. 1; 6− 9; 11− 15; 18; 19; 21∈ I∗R [7].
Proof. It is readily checked that|[(2 3)(#19)] ∩ (#61)|=8, the common &ower at point 1;

164 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
|[(2 7)(3 6)(4 5)(#1)] ∩ (#61)|=13, the common &ower at point 1;|(#19) ∩ (#61)|=14, the common &ower at point 1;|[(4 5)(#1)] ∩ (#19)|=15, the common &ower at point 1;|[(6 7)(#61)] ∩ (#7)|=16, the common &ower at point 1;|(#1) ∩ (#61)|=18, the common &ower at point 1;|(#7) ∩ (#19)|=19, the common &ower at point 1 or 2;|(#1) ∩ (#19)|=21, the common &ower at point 1 or 2.|[(8 11)(9 10 14 15)(12 13)(#19)]∩ (#61)|=26, the common &ower at any point of{2; 5; 7; 12};Consider the following permutations on I15:#1 = (1 2)(3 4)(6 7)(9 10)(11 12)(13 14);#2 = (1 2)(3 4)(9 10)(12 15);#3 = (1 2)(5 6)(8 10 11 9)(12 14 15 13);#4 = (1 3)(2 5)(6 7)(9 11)(10 15)(13 14).It is readily checked that|[#1(#61)] ∩ (#61)|=20, the common &ower at point 8 or 15;|[#2(#19)] ∩ (#19)|=22, the common &ower at point 8 or 14;|[#3(#19)] ∩ (#19)|=25, the common &ower at point {1; 2; 5; 6};|[#4(#61)] ∩ (#61)|=28, the common &ower at point {8; 9; : : : ; 15}.
Lemma 3.5. For k ∈{0; 2; 3; 4; 5; 10}; there exists a pair of Kirkman frames of type27 having k common triples; and hence 0; 2− 5; 10∈ I∗R [7].
Proof. Let point set X = {0; 1; : : : ; 9; a; b; c; d}. Two Kirkman frames of type 27 (X;G;Ai) (i=1; 2) are constructed as follows:
Group set G: 01 23 45 67 89 ab cd
Block set A1: 26d 0ac 068 09b 07d 024 03539c 16b 17c 134 125 19d 18a47a 48d 29a 28c 36a 378 27b58b 579 3bd 5ad 4bc 56c 469
Block set A2: 259 05d 026 09a 03b 04c 07836c 14a 18c 13d 157 169 12b47b 68b 37a 248 2ac 27d 3498ad 79c 9bd 5bc 46d 358 56a
It is readily checked that |A1 ∩A2|=0;|A1 ∩ (0 9)(1 8)A2|=2; |A1 ∩ (0 9)(1 8)(a b)A2|=3;|(1 2 4)(0 3 5)A1 ∩A1|=4; |A1 ∩ (0 9 1 8)A2|=5;|(0 9)(1 8)A2 ∩A2|=10.
Theorem 3.6. J [7]\{22} ⊆ I∗R [7].

Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 165
Proof. It follows by Lemmas 3.2–3.5.
Lemma 3.7. 1; 3–14; 16–19; 21; 22; 24; 25; 27–29; 31−36; 38; 39; 43; 45–49; 53; 54; 56∈I∗R [10].
Proof. Consider the following seven KTS(21)s with a point set I21 = {1; 2; : : : ; 21} andan automorphism
%=(1)(2) · · · (7)(8 9 · · · 14)(15 16 · · · 21)
that acts on the base blocks listed as below:
A1 1,8,15; 2,8,18; 3,8,21; 4,8,17; 5,8,20; 6,8,16; 7,8,19; 8,9,11A4 1,8,15; 2,8,18; 3,8,21; 4,8,17; 5,8,20; 6,8,16; 7,8,19; 8,9,13No. 1 1,8,21; 2,8,15; 3,8,18; 4,8,20; 5,8,19; 6,8,17; 7,8,16; 8,9,13No. 2 1,8,18; 2,8,20; 3,8,21; 4,8,19; 5,8,15; 6,8,17; 7,8,16; 8,9,13No. 3 1,8,20; 2,8,21; 3,8,19; 4,8,15; 5,8,18; 6,8,17; 7,8,16; 8,9,13No. 4 1,8,21; 2,8,15; 3,8,18; 4,8,20; 5,8,19; 6,8,17; 7,8,16; 8,9,11No. 5 1,8,20; 2,8,19; 3,8,18; 4,8,21; 5,8,15; 6,8,17; 7,8,16; 8,9,11
(common base blocks)
1,2,4; 2,3,5; 3,4,6; 4,5,7; 1,5,6; 2,6,7; 1,3,7; 15,16,18
Here, A1 is actually A1 in Mathon et al. (1981) under the isomorphism mapping:(i)1→ i+1; (i)2→ i+8 for 06 i6 6; 03→ 15; 13→ 19; 23→ 16; 33→ 20; 43→ 17;53 → 21; 63 → 18.Here, A4 is actually A4 in Mathon et al. (1981) under the isomorphism mapping:
(i)1→ i+1; (i)2→ i+15 for 06 i6 6; 03→ 8; 13→ 13; 23→ 11; 33→ 9; 43→ 14;53 → 12; 63 → 10.Nos. 1–5 come from Tonchev (1987) with the same labeling numbers. Let [#i] (or
#A1; #A4) denote the set of all triples which is obtained by developing the base blocksof No. i (or A1; A4) under the permutation % for i=1; 2; 3; 4; 5. Let
#=(8 15)(9 16)(10 17)(11 18)(12 19)(13 20)(14 21):
It is readily checked that|((1 2 5)(4 7 6)(16 18)(17 21)(19 20)[#2]) ∩ [#A1]|=11, the common &ower atpoint 15;|((1 3)(2 4 5)(16 18)(17 21)(19 20)[#2]) ∩ [#4]|=13, the common &ower atpoint 15;|(#[#A4]) ∩ [#A4]|=14, the common &ower at point 1;| ( (4 7) (8 15 18 11) (9 16) (10 17) (12 19) (13 20) (14 21) [ #1 ]) ∩ [ #3 ] | =15, thecommon &ower at point 5;| ( (5 7) (8 15) (9 18 13 20 11 16) (10 17) (12 19) (14 21) [ #A4 ]) ∩ [ #4 ] | =16, thecommon &ower at point 4;

166 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
|((3 6)#[#A4]) ∩ [#4]|=17, the common &ower at point 4;|((8 21)[#A1]) ∩ [#2]|=18, the common &ower at point 3;| ((1 4) (8 16) (9 15) (10 17) (11 18) (12 19) (13 20) (14 21) [#1]) ∩ [#4]|=19, thecommon &ower at point 2;|((8 15 9 16)(10 18 11 17)(12 19)(13 20)(14 21)[#1]) ∩ [#A1]|=20, the common&ower at point 4;|(#[#A4]) ∩ [#A1]|=21, the common &ower at point 1;|((8 21)[#A4]) ∩ [#2]|=22, the common &ower at point 3;|((8 17)[#4]) ∩ [#2]|=23, the common &ower at point 6;|((4 3 6 2 7 5)[#A4]) ∩ [#A4]|=24, the common &ower at point 1;|((5 6)(9 17)(10 16)(11 15)[#1]) ∩ [#1]|=26, the common &ower at point 1;|((8 17)[#1]) ∩ [#2]|=27, the common &ower at point 6;|[#3] ∩ [#4]|=28, the common &ower at point 6 or 7;|((1 5 2 3 7 6 4)(16 18)(19 20)[#3]) ∩ [#A1]|=29, the common &ower at point 15;|((1 5)[#1]) ∩ [#2]|=31, the common &ower at point 6;|((8 18)[#4]) ∩ [#5]|=32, the common &ower at point 3;|((1 2)(8 20)[#4]) ∩ [#1]|=34, the common &ower at point 4;|[#1] ∩ [#5]|=35, the common &ower at point 3, 6 or 7;|((1 4 5)(2 3)(19 20)[#3]) ∩ [#2]|=37, the common &ower at point 8;|((1 3 2)(4 7 6 5)[#1]) ∩ [#A1]|=38, the common &ower at point 1;|((1 4)(2 5)(15 16)[#1]) ∩ [#5]|=39, the common &ower at point 18;|((1 3)(2 4 5)(16 18)[#2]) ∩ [#4]|=41, the common &ower at point 15;|[#4] ∩ [#5]|=42, the common &ower at point 3, 6 or 7;|((1 20 8 4 16 11 6 17 12 7 15 10 3 19 14)(2 21 9 5 18 13)[#3]) ∩ [#1]|=43, thecommon &ower at any point of {17; 18; 19; 20; 21};|((1 2 4 3)(6 8)[#5]) ∩ [#2]|=44, the common &ower at point 17;|((1 2)[#1]) ∩ [#4]|=45, the common &ower at point 4;|((1 5 4 3 2)(16 18)[#2]) ∩ [#3]|=46, the common &ower at point 15;|((8 15)[#1]) ∩ [#4]|=48, the common &ower at point 2;|((1 4)(3 5)[#4]) ∩ [#3]|=49, the common &ower at any point of {1; 3; 5; 6; 7};|((1 20 8 4 15 10 3 19 14)(2 21 9 5 18 13)(6 17 12 7 16 11)[#3]) ∩ [#1]|=53, thecommon &ower at point 18;|((1 10 5 12 7 14 2 9 3 11 6 13 4 8)(15 20)(17 18)(16 19)[#3]) ∩ [#3]|=55, thecommon &ower at point 5 or 12;|((3 2 4 5)[#3]) ∩ [#5]|=56, the common &ower at any point of {15; 16; : : : ; 21};|((1 4)(2 5)[#1]) ∩ [#5]|=57, the common &ower at any point of {15; 16; : : : ; 21};|((1 19)(2 17)(3 16)(4 18)(5 15)(6 20)(7 21)[#2]) ∩ [#2]|=58, the common &owerat any point of {8; 9; : : : ; 14};|((2 1 4)(3 5)[#3])∩[#4]|=59, the common &ower at any point of {4; 15; 16; : : : ; 21};|[#1]) ∩ [#4]|=63, the common &ower at any point of I15\{8; 9; : : : ; 14};|((1 5 4 3 2)[#2]) ∩ [#3]|=64, the common &ower at any point of {8; 9; : : : ; 21};|((1 3)(2 5 4)[#1])∩ [#2]|=66, the common &ower at any point of {3; 8; 9; : : : ; 21}.

Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 167
Lemma 3.8. 15; 20; 23; 26; 30∈ I∗R [10].
Proof. Let X =Z5×{1; 2; 3; 4}∪{∞}. The base triples Bi ; i=1; 2; : : : ; 6, are as follows:
B1: 011103 321323 410244 214204 311222 431424 3334∞012133 222343 123214 110434 310344 021324 4142∞
B2: 011103 214234 311222 410214 321323 330424 4344∞012133 110444 310334 021324 123214 222343 4142∞
B3: 011103 214314 310434 023224 123344 221323 4142∞012133 113244 311222 410204 420323 432434 1314∞
B4: 011103 214304 314244 411234 023214 221333 2324∞012133 310444 412232 020334 421323 431424 1112∞
B5: 011103 213234 311424 411222 021323 423304 4344∞012133 310334 413214 022244 422343 130424 1112∞
B6: 011103 211234 411344 022214 422343 330424 3132∞012133 112204 310212 411424 322334 420313 4344∞
Let dev(Bi)= {B+x: B∈Bi ; x∈Z5} for 16 i6 6. Then, (X; dev(Bi)) is a KTS(21)for 16 i6 6. It is readily checked that
|dev(B2) ∩ dev(B3)|=25, the common &ower at ∞, it follows 15∈ I∗R [10];|dev(B3) ∩ dev(B4)|=30, the common &ower at ∞, it follows 20∈ I∗R [10];|dev(B5) ∩ dev(B6)|=40, the common &ower at ∞, it follows 30∈ I∗R [10];|[(11 12)dev(B1)]∩dev(B2)|=33, the common &ower at ∞, it follows 23∈ I∗R [10];|[(13 14)dev(B1)]∩dev(B2)|=36, the common &ower at ∞, it follows 26∈ I∗R [10].
Lemma 3.9. 0; 2; 50∈ I∗R [10].
Proof. Let X =Z5×{1; 2; 3; 4} ∪ {∞}. The base triples C1; C2; C3 and C4 are asfollows:
C1: 011132 213304 312434 411323 021203 224214 4344∞012112 110334 313344 022314 220424 321343 4142∞
C2: 011132 310334 413324 024314 120444 421323 2122∞012112 110434 313344 410323 022224 324243 1314∞
C3: 011103 311343 411224 023234 422314 330444 2122∞012112 110424 310334 412214 021323 324233 4344∞
C4: 011103 311343 411224 023234 422314 330444 2122∞012112 110424 310334 412214 024213 322333 4344∞

168 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
Then each (X; dev(Ci)) for i=1; 2; 3; 4 is a KTS(21). It is readily checked that|dev(B6) ∩ dev(C1)|=10, where dev(B6) is taken from Lemma 3.8, the common&ower at ∞. Hence 0∈ I∗R [10].|(01 02)(13 14)(dev(B6) ∩ dev(C2)|=12 with the common &ower at ∞, and hence2∈ I∗R [10].|dev(C3)∩dev(C4)|=60 with the common &ower at ∞, and hence 50∈ I∗R [10].
Lemma 3.10. 40∈ I∗R [10].
Proof. Let X =Z5×{1; 2; 3; 4} ∪ {∞}. The base triples C5 and C6 are as follows:
C5: 011103 214102 312214 123243 423344 130434 2324∞012333 113214 310444 410334 021224 421343 2122∞
C6: 011103 213314 310234 123243 222344 130424 4142∞012132 112434 312214 411323 024204 120333 4344∞
Let dev(Ci)={B+x: B∈Ci ; x∈Z5} for i=5; 6. Then, each (X; dev(Ci)) is a KTS(21)for i=5; 6. It is readily checked that |dev(C5)∩ dev(C6)|=50, the common &ower at∞, it follows 40∈ I∗R [10].
Lemma 3.11. 44; 52∈ I∗R [10].
Proof. Let I21 = {1; 2; : : : ; 21}. A contains the following triples:
1, 2, 4 1, 3, 7 1, 5, 6 1, 8, 20 1, 9, 21 1, 10, 153, 14, 18 2, 8, 21 2, 10, 16 2, 13, 19 2, 11, 17 2, 12, 185, 9, 19 4, 13, 20 3, 11, 15 3, 12, 16 3, 4, 6 3, 9, 206, 11, 20 5, 14, 17 4, 14, 21 4, 10, 17 5, 13, 16 4, 5, 77, 8, 16 6, 10, 19 7, 12, 20 5, 11, 21 7, 10, 18 6, 8, 1710, 12, 13 9, 11, 12 8, 9, 13 6, 9, 18 8, 12, 14 11, 13, 1415, 17, 21 15, 16, 18 17, 18, 19 7, 14, 15 15, 19, 20 16, 19, 21
1, 11, 16 1, 12, 17 1, 13, 18 1, 14, 192, 14, 20 2, 9, 15 2, 3, 5 2, 6, 73, 10, 21 3, 8, 19 4, 8, 15 3, 13, 174, 12, 19 4, 11, 18 6, 12, 21 4, 9, 165, 8, 18 5, 10, 20 7, 11, 19 5, 12, 156, 13, 15 6, 14, 16 9, 10, 14 8, 10, 117, 9, 17 7, 13, 21 16, 17, 20 18, 20, 21
Then (I21;A) is a KTS(21). It is readily checked that|((8 15)(9 21)(10 20)(11 19)(12 18)(13 17)(14 16)A) ∩A|=62;|((1 20 8 4 15 10 3 19 14)(2 21 9 5 18 13)(6 17 12 7 16 11)A)∩ [#1]|=54, where[#1] is the KTS(21) of No. 1 provided in Lemma 3.7.
Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 169
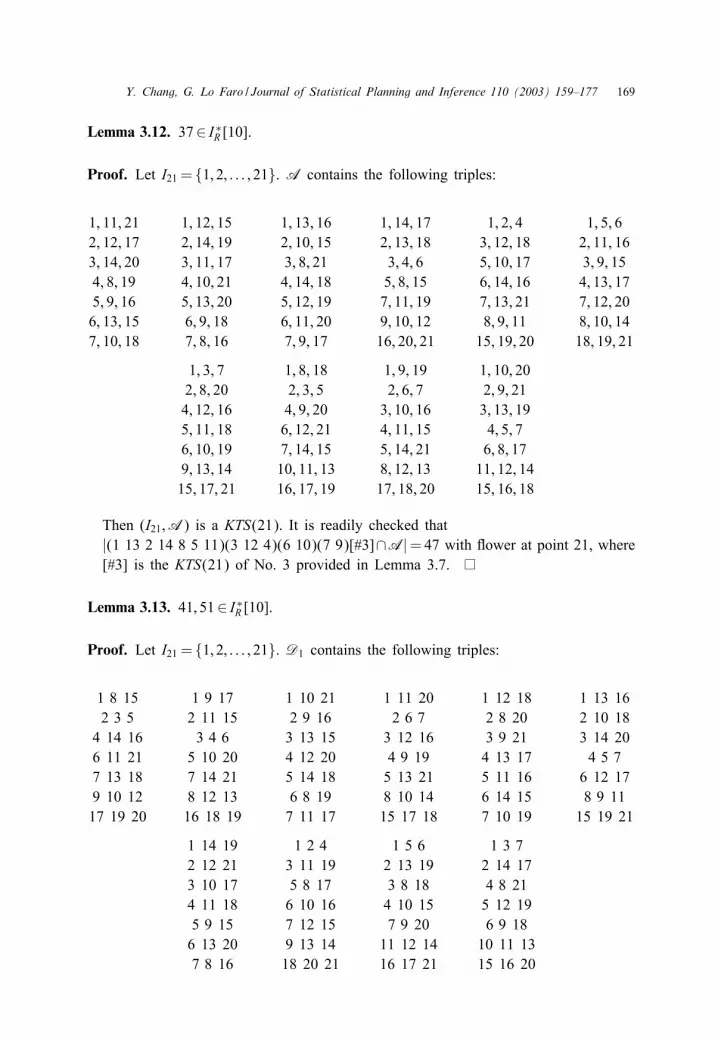
Lemma 3.12. 37∈ I∗R [10].
Proof. Let I21 = {1; 2; : : : ; 21}. A contains the following triples:
1, 11, 21 1, 12, 15 1, 13, 16 1, 14, 17 1, 2, 4 1, 5, 62, 12, 17 2, 14, 19 2, 10, 15 2, 13, 18 3, 12, 18 2, 11, 163, 14, 20 3, 11, 17 3, 8, 21 3, 4, 6 5, 10, 17 3, 9, 154, 8, 19 4, 10, 21 4, 14, 18 5, 8, 15 6, 14, 16 4, 13, 175, 9, 16 5, 13, 20 5, 12, 19 7, 11, 19 7, 13, 21 7, 12, 206, 13, 15 6, 9, 18 6, 11, 20 9, 10, 12 8, 9, 11 8, 10, 147, 10, 18 7, 8, 16 7, 9, 17 16, 20, 21 15, 19, 20 18, 19, 21
1, 3, 7 1, 8, 18 1, 9, 19 1, 10, 202, 8, 20 2, 3, 5 2, 6, 7 2, 9, 214, 12, 16 4, 9, 20 3, 10, 16 3, 13, 195, 11, 18 6, 12, 21 4, 11, 15 4, 5, 76, 10, 19 7, 14, 15 5, 14, 21 6, 8, 179, 13, 14 10, 11, 13 8, 12, 13 11, 12, 1415, 17, 21 16, 17, 19 17, 18, 20 15, 16, 18
Then (I21;A) is a KTS(21). It is readily checked that|(1 13 2 14 8 5 11)(3 12 4)(6 10)(7 9)[#3]∩A|=47 with &ower at point 21, where[#3] is the KTS(21) of No. 3 provided in Lemma 3.7.
Lemma 3.13. 41; 51∈ I∗R [10].
Proof. Let I21 = {1; 2; : : : ; 21}. D1 contains the following triples:
1 8 15 1 9 17 1 10 21 1 11 20 1 12 18 1 13 162 3 5 2 11 15 2 9 16 2 6 7 2 8 20 2 10 184 14 16 3 4 6 3 13 15 3 12 16 3 9 21 3 14 206 11 21 5 10 20 4 12 20 4 9 19 4 13 17 4 5 77 13 18 7 14 21 5 14 18 5 13 21 5 11 16 6 12 179 10 12 8 12 13 6 8 19 8 10 14 6 14 15 8 9 1117 19 20 16 18 19 7 11 17 15 17 18 7 10 19 15 19 21
1 14 19 1 2 4 1 5 6 1 3 72 12 21 3 11 19 2 13 19 2 14 173 10 17 5 8 17 3 8 18 4 8 214 11 18 6 10 16 4 10 15 5 12 195 9 15 7 12 15 7 9 20 6 9 186 13 20 9 13 14 11 12 14 10 11 137 8 16 18 20 21 16 17 21 15 16 20

170 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
D2 contains the following triples:
1 8 19 1 9 17 1 10 21 1 11 18 1 12 20 1 13 163 4 6 4 5 7 2 12 19 2 13 21 2 14 17 2 3 52 9 16 2 11 15 3 8 18 3 12 16 3 13 15 4 9 195 10 20 3 14 20 4 14 16 4 10 15 4 8 21 6 11 217 13 18 6 10 16 5 9 15 5 8 17 5 11 16 7 12 1511 12 14 8 12 13 6 13 20 6 14 19 6 9 18 8 10 1415 17 21 18 19 21 7 11 17 7 9 20 7 10 19 17 18 20
1 14 15 1 2 4 1 5 6 1 3 72 6 7 3 9 21 2 8 20 2 10 183 10 17 5 14 18 3 11 19 4 11 204 12 18 6 12 17 4 13 17 5 12 215 13 19 7 8 16 7 14 21 6 8 158 9 11 10 11 13 9 10 12 9 13 1416 20 21 15 19 20 15 16 18 16 17 19
D3 contains the following triples:
1 8 19 1 9 17 1 10 21 1 11 18 1 12 20 1 13 162 14 20 2 6 7 2 12 19 2 13 21 2 8 18 2 3 53 9 21 3 10 20 3 13 15 3 4 6 3 11 19 4 9 194 10 15 4 8 21 4 14 16 5 14 17 4 13 17 6 11 215 11 16 5 13 19 5 8 20 7 8 16 5 9 15 7 12 156 12 17 11 12 14 6 9 18 9 10 12 6 10 16 8 10 147 13 18 15 16 18 7 11 17 15 19 20 7 14 21 17 18 20
1 14 15 1 2 4 1 5 6 1 3 72 10 17 3 14 18 2 11 15 2 9 163 12 16 5 12 21 3 8 17 4 11 204 5 7 6 8 15 4 12 18 5 10 186 13 20 7 9 20 7 10 19 6 14 198 9 11 10 11 13 9 13 14 8 12 1318 19 21 16 17 19 16 20 21 15 17 21
It is readily checked that|D1 ∩D2|=51, the common &ower at any point of {3; 7; 9; 10} and so 41∈ I∗R [10];|D2∩D3|=61, the common &ower at any point of {1; 4; 6; 7; 9; 11; 12; 13; 15; 16; 19; 21}and so 51∈ I∗R [10].
Theorem 3.14. I∗R [10]= J [10].
Proof. It follows by Lemmas 3.2, 3.7–3.13.

Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 171
4. Several lemmas on I∗R [r] for r ≡ 1(mod 3)
We quote two results for later use.
Lemma 4.1 (Brouwer, 1979). A B({4; 7∗}; 1; v) (with exactly one block of size 7)exists if and only if v ≡ 7; 10 (mod 12); v =10; 19.
Lemma 4.2 (Rees and Stinson, 1988). Suppose that v ≡ w ≡ 3 (mod 6) and v¿ 3w.Then; there is a KTS(v) containing a sub-KTS(w).
Lemma 4.3. Let v ≡ 1 (mod 3) and v¿ 13. Suppose that there exists a (v; {4; 7};1)-PBD; in which contains N blocks of size 4; and ) blocks of size 7 where )=0; 1.Then 2s+8t+)b∈ I∗R [v]; where s and t are non-negative integers such that s+ t6Nand b∈ J [7]\{22}.
Proof. A (v{4; 7}; 1)-PBD can be regarded as a {4; 7}-GDD with group type 1v. Giveevery point of the GDD weight 2. The input designs required in Theorem 2.1 areguaranteed by Lemma 3.1 and Theorem 3.6. By Theorem 2.1 there exists a pair ofKirkman frames of type 2v having 2s+8t+b common triples, where s; t are non-negativeintegers such that s+ t6N and b∈ J [7]\{22}. This completes the proof.
Lemma 4.4. J [3u + 1]\{2u(3u + 1) − 6} ⊆ I∗R [3u + 1] for all u ≡ 2; 3 (mod 4) andu¿ 7.
Proof. By Lemma 4.1, there is a (3u + 1; {4; 7∗}; 1)-PBD, in which contains uniqueblock of size 7, and (u(3u + 1) − 14)=4 blocks of size 4. Using Lemma 4.3 withN =(u(3u + 1) − 14)=4 and )=1, we have 2s + 8t + b∈ I∗R [3u + 1], where s and tare non-negative integers such that s+ t6 (u(3u+ 1)− 14)=4 and b∈ J [7]\{22}. Forany n∈ J [3u+ 1]\{2u(3u+ 1)− 6}, it is easy to see that n can be written as a linearcombination of 2s + 8t + b such that s + t6 (u(3u + 1) − 14)=4 and b∈ J [7]\{22}.Hence, we have J [3u+ 1]\{2u(3u+ 1)− 6} ⊆ I∗R [3u+ 1].
Lemma 4.5. J [3u+1]\{0; 1; : : : ; 5u−4; 2u(3u+1)−13; 2u(3u+1)−7; 2u(3u+1)−4} ⊆I∗R [3u+ 1] for all u ≡ 0; 1 (mod 4) and u¿ 4.
Proof. By u ≡ 0; 1 (mod 4) and u¿ 4, there is a (3u+1; 4; 1)-BIBD. Delete a point ofthe BIBD to obtain a 4-GDD with group type 3u, in which there contains a 3u(u−1)=4blocks of size 4. Select a point in the uth group, say f, there are u−1 blocks containingthe point f in the newly 4-GDD. Give each point of the GDD weight 2. To applyTheorem 2.2 we check all conditions of Theorem 2.2 as follows: For each blockcontaining f, input the same Kirkman frames of type 24 (this is, a pair of Kirkmanframes of type 24 with the same &ower at any point, say z ∈Yf by using the samesymbols as Theorem 2.2, which intersect in other Kve common triples). For each blockB not containing f, input a pair of Kirkman frames of type 24 with kB common triples

172 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
where kB ∈{0; 2; 8}, which is guaranteed by Lemma 3.1. Using Theorem 2.2, we obtaina pair of Kirkman frames of type 6u with the same &ower at z (here z is at the uthgroup), which intersect in 2s+ 8t + 5(u− 1) other triples where s; t are non-negativeintegers such that s+ t6 3u(u− 1)=4− (u− 1). Apply Theorem 2.3 with a=3 to Kllthe holes of the newly Kirkman frames of type 6u with the common &ower at z. Fillthe ith (16 i6 u − 1) group by a pair of KTS(9) containing the same sub-KTS(3)with bi (16 i6 u − 1) common triples where bi ∈{1; 2; 3; 4; 6; 12} by Chang and LoFaro (1999); and Kll the uth group by a pair of KTS(9)s with the common &owerat z intersecting in bu other triples where bu ∈{0; 2; 8} (by Lemma 3.1). Then, usingTheorem 2.3 we obtain a pair of KTS(6u+ 3)’s with the common &ower at z, whichintersect in
2s+ 8t + 5(u− 1) + ∑16i6u
bi − (u− 1) (1)
other triples where s; t are non-negative integers such that s+ t6 3u(u−1)=4−(u−1);bi ∈{1; 2; 3; 4; 6; 12} for 16 i6 u− 1 and bu ∈{0; 2; 8}.For any n∈ J [3u+1]\{2u(3u+1)−13; 2u(3u+1)−7; 2u(3u+1)−4} and n¿ 5(u−1),
it is not diPcult to show that n can be written as a linear combination of (1). HenceJ [3u+1]\{0; 1; : : : ; 5u−4; 2u(3u+1)−13; 2u(3u+1)−7; 2u(3u+1)−4} ⊆ I∗R [3u+1].
Lemma 4.6. For all u ≡ 0; 1 (mod 4) and u¿ 4; there exists a pair of Kirkman framesof type 6u having one triple in common.
Proof. For u ≡ 0; 1 (mod 4) and u¿ 4, there is a (3u+ 1; 4; 1) -BIBD. Delete a pointof the BIBD to obtain a 4 -GDD with group type 3u, say, (X;G;A) where |X |=3uand G= {H1; H2; : : : ; Hu}. Give each point of X weight 2. Let Y =X×{1; 2}. Select aKxed block B0 ∈A and let B0 = {x; y; z; w}.For every block B∈A\{B0}, by Lemma 3.1 there is a pair Kirkman frames (B×
{1; 2}; {{b}×{1; 2}: b∈B};BB) and (B×{1; 2}; {{b}×{1; 2}: b∈B};CB) with grouptype 24 and BB ∩ CB= ∅.For block B0, a pair of Kirkman frames of group type 24 (B0×{1; 2}; {{b}×{1; 2}:
b∈B0};BB0 ) and (B0×{1; 2}; {{b}×{1; 2}: b∈B0};CB0 ) are constructed as follows(the element (b; i)∈B0×{1; 2} is brie&y denoted as bi):
Groups x1 x2 y1 y2 z1 z2 w1 w2
Block set BB0 : y1 z1 w2 x1 z1 w1 x1 y2 w2 x1 y1 z2y2 z2 w1 x2 z2 w2 x2 y1 w1 x2 y2 z1
Block set CB0 : y1 z1 w2 x1 z2 w2 x1 y1 w1 x1 y2 z1y2 z2 w1 x2 z1 w1 x2 y2 w2 x2 y1 z2
Select any element v such that v and y are in the same group of G but v =y. Let# be the permutation on Y : #=(y1 v1). Then |BB0 ∩ #CB0 |=1.

Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 173
Let B=∪B∈ABB and C=∪B∈ACB. Then, it is easy to see that (Y; {Hl×{1; 2}: 16 l6 u};B) and (Y; {Hl×{1; 2}: 16 l6 u}; #C) are two Kirkman frames of type 6u withthe same groups. From the construction, it is easy to check that |BA∩#CB|=0 if A =Bor A=B =B0. Then |B ∩ #C|=1. The conclusion follows.
Lemma 4.7. For any k ∈{0; 15; 90; 120; 165}; there exists a pair of Kirkman framesof type 66 with the common ,ower at some point which intersect in k other triples;There exists a pair of Kirkman frames of type 66 having k common triples fork ∈{45; 72; 73}.
Proof. A Kirkman frame (X;G;A) of type 66 is listed as follows:Point set X =(((Z5×{1; 2}) ∪ {∞})×Z3) ∪ {%1; %2; %3}.Group set G : Gi= {(i; 1; 0); (i; 1; 1); (i; 1; 2); (i; 2; 0); (i; 2; 1); (i; 2; 2)} for i∈Z5, and
G∞= {(∞; 1); (∞; 2); (∞; 0); %1; %2; %3}.Partial parallel classes corresponding to Gi; i∈Z5:
{(∞; 1 + j); (1 + i; 1; j); (3 + i; 1; 2 + j)},{(∞; 2 + j); (4 + i; 2; 1 + j); (3 + i; 2; 2 + j)},{(∞; j); (3 + i; 1; j); (2 + i; 2; 1 + j)},{%1; (1 + i; 1; 1 + j); (2 + i; 2; 2 + j)},{%2; (2 + i; 1; 2 + j); (1 + i; 2; 1 + j)},{%3; (4 + i; 1; 1 + j); (2 + i; 2; j)},{(2 + i; 1; 1 + j); (3 + i; 1; 1 + j); (4 + i; 1; 2 + j)},{(1 + i; 2; 2 + j); (3 + i; 2; 1 + j); (4 + i; 2; 2 + j)},{(4 + i; 1; j); (2 + i; 1; j); (1 + i; 2; j)},{(3 + i; 2; j); (4 + i; 2; j); (1 + i; 1; 2 + j)} where j∈Z3.
Partial parallel classes corresponding to G∞:{(i; 2; j); (2 + i; 2; 1 + j); (4 + i; 1; 1 + j)},{(i; 1; j); (1 + i; 1; 2 + j); (2 + i; 2; 2 + j)} where i∈Z5 and j∈Z3.
Consider the following permutations:#1 = (%1 %2 %3)
∏i∈Z5 ; j∈Z3 ((i; 1; j) (i; 2; j));
#2 = (%1 %2)∏i∈Z5 ; j∈Z3 ((i; 1; j) (i; 2; j));
#3 = ((∞; 1) %2 (∞; 2) (∞; 0) %1);#4 = ((∞; 1) (∞; 2) (∞; 0))..1 : (i; 1; j)→ (i+1; 1; j+1) for any i∈Z5 and j∈Z3, and other elements are Kxed;.2 = (%1 %2 %3)((∞; 1) (∞; 2) (∞; 0))((0; 1; 0) (0; 2; 1));.3 = (%1 %2 %3)((∞; 1) (∞; 2) (∞; 0))((0; 1; 0) (0; 2; 0));
It is readily checked that |A ∩ #1(A)|=15 with common &ower at %2;|A ∩ #2(A)|=30 with common &ower at %1 or %2;|A ∩ #3(A)|=105 with common &ower at %3;|A ∩ #4(A)|=135 with common &ower at %1; %2 or %3;

174 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
|A ∩A|=180 with common &ower at any point of X ;|A ∩ .1(A)|=45; |A ∩ .2(A)|=72; |A ∩ .3(A)|=73.
Lemma 4.8. J [19]\{215; 221; 224} ⊆ I∗R [19].
Proof. By Lemma 4.7 there exists a pair of Kirkman frames of type 66 with thecommon &ower z (we assume that z is at the sixth group), which intersect in k othertriples where k ∈{0; 15; 90; 120; 165}. By Theorem 2.3, Kll the ith (16 i6 5) groupby a pair of KTS(9) containing the same sub-KTS(3) with bi (16 i6 u− 1) commontriples where bi ∈{1; 2; 3; 4; 6; 12}, and Kll the sixth group by a pair of KTS(9)’s withthe common &ower at z, which intersect in b6 other triples where b6 ∈{0; 2; 8} (byLemma 3.1). Then
k + b1 + b2 + · · ·+ b5 + b6 − 5∈ I∗R [19]; (2)
where k ∈{0; 15; 90; 120; 165}; bi ∈{1; 2; 3; 4; 6; 12} for 16 i6 5 and b6 ∈{0; 2; 8}.For any n∈ J [19]\{65; 71; 74; 79; 80; : : : ; 90; 215; 221; 224}, it is not diPcult to show
that n can be written as a linear combination of (2). Then, J [19]\{65; 71; 74; 79; 80; : : : ;90; 215; 221; 224} ⊆ I∗R [19].By Lemma 4.7 there exists a pair of Kirkman frames of type 66 having k common
triples where k ∈{45; 72; 73}. By Theorem 2.4, we have k + 2s + 8t ∈ I∗R [19] wheres; t are non-negative integers such that s+ t6 6 and k ∈{45; 72; 73}. It is easy to see{65; 71; 74; 79; 80; : : : ; 90} ⊆ I∗R [19] by selecting suitable k; s and t. The conclusionfollows by the above discussions.
Lemma 4.9. J [3u+1]\{2u(3u+1)− 13; 2u(3u+1)− 7; 2u(3u+1)− 4} ⊆ I∗R [3u+1]for all u ≡ 0; 1 (mod 4) and u¿ 4.
Proof. By Lemma 4.5 we only need to show that n∈ I∗R [3u + 1] for any integer06 n6 5u− 4. We divide two cases as follows:
Case (i): n is odd. By Lemma 4.6, there exists a pair of Kirkman frames of type 6u
having one common triple. By Theorem 2.4, we have 1+2s+8t ∈ I∗R [3u+1] where s; tare non-negative integers such that s+ t6 u. Then, it is easy to see that n∈ I∗R [3u+1]for any n∈{0; 1; 2; : : : ; 5u− 4} and n is odd.Case (ii): n is even. There exists a (3u + 1; 4; 1)-PBD for u ≡ 0; 1 (mod 4), which
contains u(3u + 1)=4 blocks of size 4. By Lemma 4.3 with N = u(3u + 1)=4 and)=0; 2s+8t ∈ I∗R [3u+1] where s; t are non-negative integers such that s+ t6 u(3u+1)=4. It is easy to see that n can be written as a form of 2s + 8t for any eveninteger 06 n6 5u − 4. Then, n∈ I∗R [3u + 1] for any n∈{0; 1; 2; : : : ; 5u − 4} and n iseven.
Lemma 4.10. J [13]\{97; 100}∈ I∗R [13]; J [r]\{2r(r − 1)=3 − 13; 2r(r − 1)=3 − 7;2r(r − 1)=3− 4}∈ I∗R [r] for r=16; 19.

Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 175
Proof. By Lemmas 4.8 and 4.9 we only need to show that 91∈ I∗R [13]. Let X =Z13×{1;2} ∪ {∞}. The base triples B1 and B2 are as follows:
B1: ∞0061 12101120 113150 8111140 519160 2171100 4110120 7080110 103090
B2: ∞0061 111121110 81101120 1141100 317140 015180 912170 506020 103090
Let dev(Bi)= {B+ x: B∈Bi ; x∈Z13} for i=1; 2. Then, it is readily to check that(X; dev(Bi)) (i=1; 2) is KTS(27). In fact, Bi forms a parallel class, the others areobtained by developing through Z13. Clearly, |dev(B1)∩dev(B)2|=91+13 and hence91∈ I∗R [13].
Lemma 4.11. I∗R [3u+ 1]= J [3u+ 1] for any u ≡ 0; 1 (mod 4) and u¿ 7.
Proof. By Lemma 4.9 we only need to show that 2u(3u + 1) − 13; 2u(3u + 1) −7; 2u(3u + 1) − 4∈ I∗R [3u + 1]. Obviously, 6u + 3 ≡ 3 (mod 6) and 6u + 3¿ 45. ByLemma 4.2 there is a KTS(6u + 3) (X;A) containing a sub-design KTS(15) (Y;B)where Y ⊆ X and |Y |=15. By Theorem 3.6 there is a pair of KTS(15) (Y;C1) and(Y;C2) with the common &ower at some point, say z, and |C1∩C2|=22 (or 28, or 31).It is readily checked that (X; (A\B)∪C1) and (X; (A\B)∪C2) are two KTS(6u+3)having (2u+1)(3u+1)−13 (or (2u+1)(3u+1)−7 or (2u+1)(3u+1)−4) commontriples. Then, we get 2u(3u+1)− 13; 2u(3u+1)− 7; 2u(3u+1)− 4∈ I∗R [3u+1].
Lemma 4.12. I∗R [3u+ 1]= J [3u+ 1] for any u ≡ 2; 3 (mod 4) and u¿ 7.
Proof. By Lemma 4.4 we only need to show that 2u(3u + 1) − 6∈ I∗R [3u + 1]. ByLemma 4.2 there is a KTS(6u + 3) (X;A) containing a sub-design KTS(9) (Y;B)where Y ⊆ X and |Y |=9. By Chang and Lo Faro (1999) there is a pair of KTS(9)(Y;C1) and (Y;C2) such that |C1 ∩C2|=6. It is readily checked that (X; (A\B)∪C1)and (X; (A\B) ∪ C2) are two KTS(6u + 3) having (2u + 1)(3u + 1) − 6 commontriples. The two KTS(6u+ 3)’s have the same &ower at any point of X \Y . Therefore,2u(3u+ 1)− 6∈ I∗R [3u+ 1].
5. Main result
Now, we are in position to present the main theorem.
Main Theorem. I∗R [r] = J [r] for any positive integer r ≡ 1 (mod 3) but r =4; 7; 13; 16;19; If r=4; 7; 13; 16; 19, then I∗R [4]= J [4]\{1; 4}; J [7]\{22} ⊆ I∗R [7]; J [13]\{97; 100}⊆ I∗R [13] and J [r]\{2r(r − 1)=3 − 13; 2r(r − 1)=3 − 7; 2r(r − 1)=3 − 4} ⊆ I∗R [r] forr=16 and 19.
Proof. The conclusion follows from Lemma 3.1, Theorems 3.6, 3.14, Lemmas 4.10–4.12.

176 Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177
Note: By Main Theorem, only nine cases are left undecided. By Lemma 1 in HoJ-man and Lindner (1987), it is easy to observe that for the nine undecided pairs of(k; r) in Main Theorem, k ∈ I∗R [r] iJ there are two Kirkman triple systems of order2r + 1 having k + r triples in common.Let (S;T) be a Kirkman triple system and write T=Fx ∪ B, where Fx is the
&ower at the point x. Let X = S\{x}, G= {{a; b}: {a; b; x}∈Fx}. Then, (X;G;B) is aKirkman frame with group size 2. The &ower intersection problem for Kirkman triplesystems becomes the intersection problem for Kirkman frames with group 2. The moregeneral intersection problem for Kirkman frames with all groups of the same size (¿ 4)is apparent and still open.
Acknowledgements
A part of this work was done while the Krst author was visiting the Universityof Messina. He expresses his sincere thanks to CNR for Knancial support and to theUniversity of Messina for the kind hospitality.
Appendix
There are four non-isomorphic STS(15) which give rise to at least one KTS(15) listedas follows (for details, see Mathon et al. (1983); also appendix in Stinson (1991)).
1 2 3 1 4 5 1 6 7 1 8 9 1 10 11 1 12 13 1 14 154 10 14 2 12 14 2 8 10 2 5 7 2 13 15 2 9 11 2 4 6
No. 1 5 8 13 3 9 10 3 12 15 3 13 14 3 5 6 3 4 7 3 8 116 9 15 6 11 13 4 9 13 4 11 15 4 8 12 5 10 15 5 9 127 11 12 7 8 15 5 11 14 6 10 12 7 9 14 6 8 14 7 10 131 2 3 1 4 5 1 6 7 1 8 9 1 10 11 1 12 13 1 14 154 10 15 2 13 15 2 12 14 2 4 6 2 5 7 2 8 10 2 9 11
No. 7 5 9 13 3 8 11 3 9 10 3 12 15 3 13 14 3 5 6 3 4 76 11 12 6 10 14 4 11 13 5 11 14 4 8 12 4 9 14 5 10 127 8 14 7 9 12 5 8 15 7 10 13 6 9 15 7 11 15 6 8 13
1 2 3 1 4 5 1 6 7 1 8 9 1 10 11 1 12 13 1 14 154 10 14 2 9 11 2 8 10 2 13 15 2 12 14 2 4 6 2 5 7
No. 19 5 8 13 3 8 12 3 9 14 3 4 7 3 5 6 3 11 15 3 10 136 9 15 6 13 14 4 11 13 5 11 14 4 8 15 5 9 10 4 9 127 11 12 7 10 15 5 12 15 6 10 12 7 9 13 7 8 14 6 8 11
1 2 3 1 4 5 1 6 7 1 8 9 1 10 11 1 12 13 1 14 154 9 11 2 9 12 2 8 10 2 5 7 2 13 15 2 11 14 2 4 6
No. 61 5 10 14 3 10 13 3 9 15 3 12 14 3 5 6 3 4 7 3 8 116 12 15 6 8 14 4 13 14 4 10 15 4 8 12 5 8 15 5 9 137 8 13 7 11 15 5 11 12 6 11 13 7 9 14 6 9 10 7 10 12

Y. Chang, G. Lo Faro / Journal of Statistical Planning and Inference 110 (2003) 159–177 177
References
Brouwer, A.E., 1979. Optimal packings of K4’s into a Kn. J. Combin. Theory (A) 26, 278–297.Chang, Y.X., Lo Faro, G., 1999. Intersection numbers of Kirkman triple systems. J. Combin. Theory (A)86, 348–361.
HoJman, D.G., Lindner, C.C., 1987. The &ower intersection problem for Steiner triple systems. Ann. DiscreteMath. 34, 243–248.
Lindner, C.C., Rosa, A., 1975. Steiner triple systems having a prescribed number of triples in common.Canad. J. Math. 27, 1166–1175.
Mathon, R.A., Phelps, K.T., Rosa, A., 1981. A class of Steiner triple systems of order 21 and associatedKirkman systems. Math. Comput. 37, 209–222.
Mathon, R.A., Phelps, K.T., Rosa, A., 1983. Small Steiner triple systems and their properties. Ars Combin.15, 3–100.
Ray-Chaudhuri, D.K., Wilson, R.M., 1971. Solution of Kirkman’s schoolgirl problem. Amer. Math. Soc.Symp. Pure Math. 19, 187–204.
Rees, R., Stinson, D.R., 1988. On the existence of Kirkman triple systems containing Kirkman subsystems.Ars Combin. 26, 3–16.
Stinson, D.R., 1991. A survey of Kirkman triple systems and related designs. Discrete Math. 92, 371–393.Tonchev, V.D., 1987. Steiner triple systems of order 21 with automorphisms of order 7. Ars Combin. 23,93–96.





























