Embed Size (px)
Citation preview
Bayesian Regression Using a Prior on theModel Fit: The R2-D2 Shrinkage Prior
Yan Dora Zhang1, Brian P. Naughton2, Howard D. Bondell3, and Brian J. Reich2
1Department of Statistics and Actuarial Science, The University of Hong Kong2Department of Statistics, North Carolina State University
3School of Mathematics and Statistics, University of Melbourne
July 9, 2020
Abstract
Prior distributions for high-dimensional linear regression require specifying a jointdistribution for the unobserved regression coefficients, which is inherently difficult.We instead propose a new class of shrinkage priors for linear regression via specifyinga prior first on the model fit, in particular, the coefficient of determination, andthen distributing through to the coefficients in a novel way. The proposed methodcompares favorably to previous approaches in terms of both concentration aroundthe origin and tail behavior, which leads to improved performance both in posteriorcontraction and in empirical performance. The limiting behavior of the proposedprior is 1/x, both around the origin and in the tails. This behavior is optimal in thesense that it simultaneously lies on the boundary of being an improper prior bothin the tails and around the origin. None of the existing shrinkage priors obtain thisbehavior in both regions simultaneously. We also demonstrate that our proposedprior leads to the same near-minimax posterior contraction rate as the spike-and-slabprior.
Keywords: Global-Local Shrinkage, High-dimensional regression, Beta-prime distribution,Coefficient of Determination
1
arX
iv:1
609.
0004
6v3
[st
at.M
E]
8 J
ul 2
020

1 Introduction
Consider the linear regression model,
Yi = xTi β + εi, i = 1, · · · , n, (1)
where Yi is the ith response, xi is the p-dimensional vector of covariates for the ith obser-
vation, β = (β1, · · · , βp)T is the coefficient vector, and the εi’s are the error terms assumed
be normal and independent with E(εi) = 0 and var(εi) = σ2. High-dimensional data with
p > n in this context is common in diverse application areas. It is well known that max-
imum likelihood estimation performs poorly in this setting, and this motivates a number
of approaches in shrinkage estimation and variable selection. In the Bayesian framework,
there are two main approaches to address such problems: two component discrete mixture
prior (also referred as spike and slab prior) and continuous shrinkage priors. The discrete
mixture priors (George & McCulloch 1993, Ishwaran & Rao 2005, Mitchell & Beauchamp
1988, Narisetty & He 2014) put a point mass (spike) at βj = 0 and a continuous prior
(slab) for the terms with βj 6= 0. Although these priors have an intuitive and appealing
representation, they lead to computational issues due to the spread of posterior probability
over the 2p models formed by including subsets of the coefficients to zero. Implementation
instead can proceed instead by applying approximation methods, such as stochastic search
variable selection (George & McCulloch 1993), shotgun stochastic search (Hans et al. 2007),
variational Bayes (Ormerod et al. 2017), and EM (Rockova & George 2014) all of which
have improved the computational feasibility and include theoretical underpinnings.
The computation issues with discrete mixture priors motivate continuous shrinkage
priors. The shrinkage priors are essentially written as global-local scale mixture Gaussian
family as summarized in Polson & Scott (2010), i.e.,
βj | φj, ω ∼ N(0, ωφj), φj ∼ π(φj), (ω, σ2) ∼ π(ω, σ2),
where ω represents the global shrinkage, while φj’s are the local variance components. Cur-
rent existing global-local priors exhibit desirable theoretic and empirical properties. They
can shrink the overall signal, while varying the amount of shrinkage on different compo-
nents. These continuous priors exhibit both heavy tails and high concentration around
2

zero. The heavy tail reduces the bias in estimation of large coefficients, while the high
concentration around zero shrinks the irrelevant coefficients heavily to zero, thus reduc-
ing the noise. Some examples include Normal-Gamma mixtures (Griffin & Brown 2010),
Horseshoe (Carvalho et al. 2009, 2010), generalized Beta (Armagan et al. 2011), general-
ized double Pareto (Armagan, Dunson & Lee 2013), Dirichlet-Laplace (Bhattacharya et al.
2015), Horseshoe+ (Bhadra et al. 2016), normal-beta prime prior (Bai & Ghosh 2019).
In general, it is difficult to specify a p-dimensional prior on β, particularly with high
dimensional data. Instead, we propose to first construct a prior on the coefficient of deter-
mination, R2, for which the model-based version is defined as the square of the correlation
coefficient between the dependent variable and its modeled expectation. A prior on this
one-number summary forms a prior on a function of the parameter vector, and is then
distributed through to the individual parameters in a natural way. We develop a class of
priors that are constructed via marginalizing over the design, as well as those condition-
ing on the design. By viewing things in this framework, our proposed class of priors are
induced by a Beta(a, b) prior on R2 and lead to priors having desirable properties both
asymptotically and in finite samples.
We show that our class of priors, which we term the R2-induced Dirichlet Decomposition
(R2-D2) priors, simultaneously obtain both heavier tails and tighter concentration around
zero than all previously proposed approaches. This optimal result translates into improved
performance in estimation and inference. We also offer a theoretical framework to compare
different global-local priors. The proposed method compares favorably to the other global-
local shrinkage priors in terms of both its concentration around the origin and its tail
behavior obtaining a limiting behavior of 1/x in both regions. This behavior is optimal in
the sense that it simultaneously lies on the boundary of being an improper prior in both
areas, and translates into improved theoretical and empirical performance.
The rest of the paper is outlined as follows. Section 2 motivates the idea of inducing
a prior via R2, and distinguishes between a marginal and conditional version. Section
3 presents the details of the conditional version in both the low- and high-dimensional
settings. Section 4 details the marginal version and provides theoretical properties of both
3

the prior and the posterior. Section 5 discusses novel MCMC algorithms for computation
of both the conditional and marginal versions, while Section 6 provides simulation results.
Section 7 provides real data examples. All proofs are given in the Appendix.
2 Motivation
The typical Bayesian approach specifies a joint distribution on the model parameters,
namely for the regression coefficients and error variance. Instead, we specify a distribution
for R2 with practical meaning, and then induce a prior on the p-dimensional β.
Suppose that the predictor vector for each observation x ∼ H(·), with E(x) = µ and
cov(x) = Σ. Assume that x is independent of the error, ε, and then the marginal variance
of y = xTβ + ε is var(xTβ) + σ2. For simplicity, we assume that the response is centered
and covariates are standardized so that µ = 0, there is no intercept term in (1), and all
diagonal elements of Σ are 1. The coefficient of determination, R2, can be calculated as the
square of the correlation coefficient between the dependent variable, y, and the modeled
value, xTβ, i.e.,
R2 =cov2(y,xTβ)
var(y)var(xTβ)=
cov2(xTβ + ε,xTβ)
var(xTβ + ε)var(xTβ)=
var(xTβ)
var(xTβ) + σ2. (2)
A hypothesized value of R2 has been used previously to tune informative priors, and
to select hyper-parameters for regularization problems. Scott & Varian (2014) elicit an
informative distribution for the error variance, σ2, based on elicitation of the expected
R2, and the response. Zhang & Bondell (2018) proposed to choose hyper-parameters for
shrinkage priors by empirically minimizing the Kullback-Leibler divergence between the
expected distribution of R2 and a Beta distribution. Here, in contrast, we develop our
approach from first principles via placing a prior distribution on R2 directly, rather than
using a hypothesized value as a tool to tune parameters in already existing priors.
Based on this representation of R2, two alternative approaches can be taken to construc-
tion of the prior. A conditional version places a Beta prior on the conditional distribution
of R2 which depends on the model design, X. Conversely, a marginal version assumes that
the marginal distribution of R2 (after integrating out β and X) has a Beta distribution.
4

The former has the interpretation of the usual sample-based version of R2, while the
latter allows for more direct asymptotic analysis of the posterior, as the design is inte-
grated out. We will show that both versions lead to priors having different, but desirable
properties.
3 Conditional R2 Prior
3.1 R2 as Elliptical Contours
We now introduce the conditional version, which, conditioning on the design points, yields
R2(β) =βTXTXβ
βTXTXβ + nσ2. (3)
We specifically write R2(β) to reflect the fact that R2 depends on the unknown vector β
(as well as σ2). Notice that (3) will reduce to the familiar sample statistic, R2, if the least-
squares estimates were substituted for β and σ2. Conditional on σ2 and X, a distribution
on R2 induces a distribution on the quadratic form, βTXTXβ.
We choose a Beta(a, b) prior for R2, where the choices of shape parameters a and b
will determine the posterior behavior and will be discussed in more detail in the theoretical
results and the implementation. An Inverse-Gamma(a1, b1) prior is used for σ2, but we note
that other choices may also be applied. A prior for β given (R2, σ2) then must be defined
on the surface of the ellipsoid:{β : βTXTXβ = nR2σ2/(1−R2)
}. When XTX is full
rank we may choose β to be uniformly distributed on this ellipsoid; that is, the distribution
of β is constant given the quadratic form. We call this choice the “uniform-on-ellipsoid”
prior for β, and show a connection to a variation on a mixture of g-priors. The following
proposition shows that β given σ2 has an elliptical distribution after integrating out R2.
Proposition 1. If R2 | σ2 has a Beta(a,b) distribution and β | R2 has a uniform prior on
the ellipsoid, then β | σ2 has the probability density function:
p(β | σ2) =Γ (p/2) |ΣX |1/2
B(a, b) πp/2(σ2)−a (
βTΣXβ)a−p/2 (
1 + βTΣXβ/σ2)−(a+b)
, (4)
where β ∈ Rp,ΣX = XTX/n, and B(·, ·) denotes the Beta function.
5

As a special case, if a = p/2 and b = 1/2, then β has a multivariate Cauchy distribution
with spread parameter ΣX/σ2. Zellner & Siow (1980) recommended these Cauchy priors for
model selection problems. The next proposition shows that for a ≤ p/2, the distribution in
(4) is equivalent to a mixture of normals g-prior, with a hyperprior on g that is the product
of Beta and Inverse-Gamma distributions.
Proposition 2. If β | σ2, z, w ∼ Np
(0, zwσ2(XTX)−1
), z ∼ Inverse-Gamma (b, n/2),
w ∼ Beta (a, p/2 − a), and a ≤ p/2, then β | σ2 has the distribution given by the density
in (4).
This representation eases the posterior computations for a Gibbs sampler discussed in
Section 5.
3.2 Sparse Regression and Local Shrinkage
The prior on R2 regulates β through the quadratic form βTΣXβ, which can shrink the
regression coefficients globally, but lacks the flexibility to handle different forms of sparsity.
In addition, the posterior is not a proper distribution when X is not full rank (e.g. when
n < p). Rather than letting β | (R2, σ2) be uniformly distributed on the ellipsoid, we put
a Normal-Gamma prior on β (Griffin & Brown 2010), but restrict its support to lie on the
surface of the ellipsoid. Specifically, we let
β | (R2, σ2,Λ) ∼ Np
(0,
σ2R2
1−R2Λ
)1
{β′ΣXβ =
σ2R2
1−R2
}(5)
λj ∼ Gamma (ν, µ) , for j = 1, . . . , p, (6)
where Gamma(ν, µ) represents Gamma distribution with shape parameter ν and rate pa-
rameter µ, Λ = diag {λ1, . . . , λp} and 1 {·} is the indicator function. Note that this prior
no longer requires ΣX to be full rank for it to be proper. Proposition 3 shows that the
induced model described in the previous section is a special case of the hierarchical model
proposed here with fixed Λ.
Proposition 3. If β | (R2, σ2,Λ) has the distribution in (5), and Λ = (XTX)−1, then
β | σ2 has the distribution in (4).
6

That is, if the contours of the Normal distribution align with the ellipsoid, then we
recover the uniform-on-ellipsoid prior.
In general, the conditional distribution of β is similar to a Bingham distribution, which
is a multivariate Normal distribution conditioned to lie on the unit sphere. This Bingham
distribution has density f(w | A) = C−1A exp{−wTAw} with respect to the uniform mea-
sure on the p− 1 dimensional unit sphere, where CA is the normalizing constant (Bingham
1974). Here, β | (R2, σ2,Λ) is a Bingham distributed random vector that has been rotated
and scaled to lie on the ellipsoid rather than the unit sphere. The matrix X determines the
rotation of the ellipsoid, R2 and σ2 determine the size of the ellipsoid, and the conditional
prior on β determines the direction to the surface. If the local variance components (λj)
are small, then regions of the ellipsoid near the axes will be favored, encouraging sparser
estimates. Like the Normal-Gamma priors, this is primarily controlled by the shape pa-
rameter, ν. Figure 1 illustrates the local shrinkage properties of the prior, showing 10,000
samples of β | (R2, σ2). Default choices of the hyper-parameters ν and µ follow from the
recommendations of Griffin & Brown (2010) and are discussed in the implementation in
Section 6.
Figure 1: 10,000 samples from the prior of β | (R2, σ2) for different choices of ν.
7

4 Marginal R2 Prior
4.1 The R2-D2 Global-Local Shrinkage Prior
Rather than conditioning on the design X, we now instead show how to construct a prior
while marginalizing out both β and the design. While the conditional version retains the
interpretation of R2 as elliptical contours in the design space, the marginal version allows
for an in depth study of the asymptotic properties of both the prior and the resulting
posterior.
Consider a prior for β satisfying E(β) = 0 and cov(β) = σ2Λ, where Λ is a diagonal
matrix with diagonal elements λ1, · · · , λp. Then
var(xTβ) = Ex{varβ(xTβ | x)}+ varx{Eβ(xTβ | x)} = Ex(σ2xTΛx) + varx(0)
= σ2Ex{tr(xTΛx)} = σ2tr{ΛEx(xxT )} = σ2tr(ΛΣ) = σ2
p∑j=1
λj.
Then R2 is represented as
R2 =var(xTβ)
var(xTβ) + σ2=
σ2p∑j=1
λj
σ2p∑j=1
λj + σ2
=
p∑j=1
λj
p∑j=1
λj + 1
≡ W
W + 1, (7)
where W ≡∑p
j=1 λj is the sum of the prior variances scaled by σ2.
Similarly as conditional R2 prior, we also assume R2 ∼ Beta(a, b), a Beta distribution
with shape parameters a and b. Then in this case, the induced prior density for W =
R2/(1 − R2) is a Beta Prime distribution (Johnson et al. 1995) denoted as BP(a, b), with
probability density function
πW (x) =Γ(a+ b)
Γ(a)Γ(b)
xa−1
(1 + x)a+b, (x > 0).
Therefore W ∼ BP(a, b) is equivalent to R2 ∼ Beta(a, b). The following section will induce
a prior on β based on the distribution of the sum of prior variances, W .
Any prior of the form E(β) = 0, cov(β) = σ2Λ and W =∑p
j=1 λj ∼ BP(a, b) induces a
Beta(a, b) prior on R2. To construct a prior with such properties, we follow the global-local
8

prior framework and express λj = φjω with∑p
j=1 φj = 1. Then W =∑p
j=1 φjω = ω is
the total prior variability, and φj is the proportion of total variance allocated to the j-th
covariate. It is natural to assume that ω ∼ BP(a, b) and the variances across covariates
have a Dirichlet prior with concentration parameter (aπ, · · · , aπ), i.e., φ = (φ1, · · · , φp) ∼
Dir(aπ, · · · , aπ). Since∑p
j=1 φj = 1, E(φj) = 1/p, and var(φj) = (p−1)/{p2(paπ+1)}, then
smaller aπ would lead to larger variance of φj, j = 1, · · · , p, thus more φj would be close to
zero with only a small proportion of larger components; while larger aπ would lead to smaller
variance of φj, j = 1, · · · , p, thus producing a more uniform φ, i.e., φ ≈ (1/p, · · · , 1/p).
So aπ controls the sparsity of the model.
To fully define the global-local prior, we further need to assign a kernel distribution on
each dimension of β. Since the Laplace distribution ensures more mass around zero and
heavier tails than the normal kernel, we consider a Laplace prior on βj for j = 1, · · · , p.
The prior is then summarized as
βj | σ2, φj, ω ∼ DE(σ(φjω/2)1/2), φ ∼ Dir(aπ, · · · , aπ), ω ∼ BP(a, b), (8)
where DE(δ) denotes a double-exponential distribution (i.e., Laplace distribution) with
mean 0 and variance 2δ2. Such prior is induced by a prior on R2 and the total prior
variance of β is decomposed through a Dirichlet prior, therefore we refer to the prior as the
R2-induced Dirichlet Decomposition (R2-D2) prior. Here ω controls the global shrinkage
degree through a and b, while φj controls the local shrinkage through aπ. Assume the
variance σ2 ∼ Inverse-Gamma(a1, b1), an inverse Gamma distribution with shape and scale
parameters a1 and b1 respectively.
Proposition 4. If ω | ξ ∼ Ga(a, ξ) and ξ ∼ Ga(b, 1), then ω ∼ BP(a, b), where Ga(µ, ν)
is the Gamma random variable with shape µ and rate ν.
By applying above Proposition 4, the prior in (8) can also be written as
βj | σ2, φj, ω ∼ DE(σ(φjω/2)1/2), φ ∼ Dir(aπ, · · · , aπ), ω | ξ ∼ Ga(a, ξ), ξ ∼ Ga(b, 1).
Proposition 5. If ω | ξ ∼ Ga(a, ξ), (φ1, · · · , φp) ∼ Dir(aπ, · · · , aπ), and a = paπ, then it
follows φjω | ξ ∼ Ga(aπ, ξ), j = 1, . . . , p independently.
9
Thus, by Proposition 5, when a = paπ, prior in (8) can also be written as
βj | σ2, λj ∼ DE(σ(λj/2)1/2), λj ∼ BP(aπ, b). (9)
or equivalently
βj | σ2, λj ∼ DE(σ(λj/2)1/2), λj | ξ ∼ Ga(aπ, ξ), ξ ∼ Ga(b, 1). (10)
We set a = paπ in the rest of the paper for the R2-D2 prior.
4.2 Properties of the R2-D2 Prior
In this section, the marginal density as well as its theoretical properties of the proposed
R2-D2 prior are established. The properties of the Horseshoe (Carvalho et al. 2009, 2010),
Horseshoe+ (Bhadra et al. 2016), generalized double Pareto prior (Armagan, Dunson & Lee
2013) and Dirichlet-Laplace prior (Bhattacharya et al. 2015) are provided as a comparison.
Proofs and technical details are given in the Appendix.
For simplicity of comparison across different priors, the variance term σ2 is fixed at 1.
Proposition 6. Given the R2-D2 prior (9), the marginal density of βj for any j = 1, · · · , p
is
πR2-D2(βj) =G3,1
1,3
(β2j
2
∣∣∣ 12−baπ− 1
2,0, 1
2
)(2π)1/2Γ(aπ)Γ(b)
=G1,3
3,1
(2β2j
∣∣∣ 32−aπ ,1, 1212
+b
)(2π)1/2Γ(aπ)Γ(b)
where Γ(·) denotes the Gamma function and Gm,np,q
(z∣∣∣b1,...,bqa1,...,ap
)denotes the Meijer G-function
(see Appendix for the detailed definition).
Now we would like to compare the theoretical properties with our proposed R2-D2 prior
with a couple of common global-local shrinkage priors. We first listed these priors.
The Horseshoe prior proposed in Carvalho et al. (2009, 2010) is
βj | λj ∼ N(0, λ2j), λj | τ ∼ C+(0, τ),
where C+(0, τ) denotes a half-Cauchy distribution with scale parameter τ , with density
π(y | τ) = 2/{πτ(1 + (y/τ)2)}.
10
The Horseshoe+ prior proposed in Bhadra et al. (2016) is
βj | λj ∼ N(0, λ2j), λj | τ, ηj ∼ C+(0, τηj), ηj ∼ C+(0, 1).
The Dirichlet-Laplace prior proposed in Bhattacharya et al. (2015) is
βj | ψj ∼ DE(ψj), ψj ∼ Ga(a∗, 1/2). (11)
The normal-beta prime prior proposed in Bai & Ghosh (2019) is as follows:
βj | τj ∼ N(0, τj), τj ∼ BP(a#, b#). (12)
−0.4 −0.2 0.0 0.2 0.4
0.0
0.5
1.0
1.5
2.0
2.5
3.0
β
Mar
gina
l den
sity
R2−D2NBPCauchyHorseshoeHorseshoe+DL
5 10 15 20
0.00
00.
002
0.00
40.
006
0.00
80.
010
β
Mar
gina
l den
sity
R2−D2NBPCauchyHorseshoeHorseshoe+DL
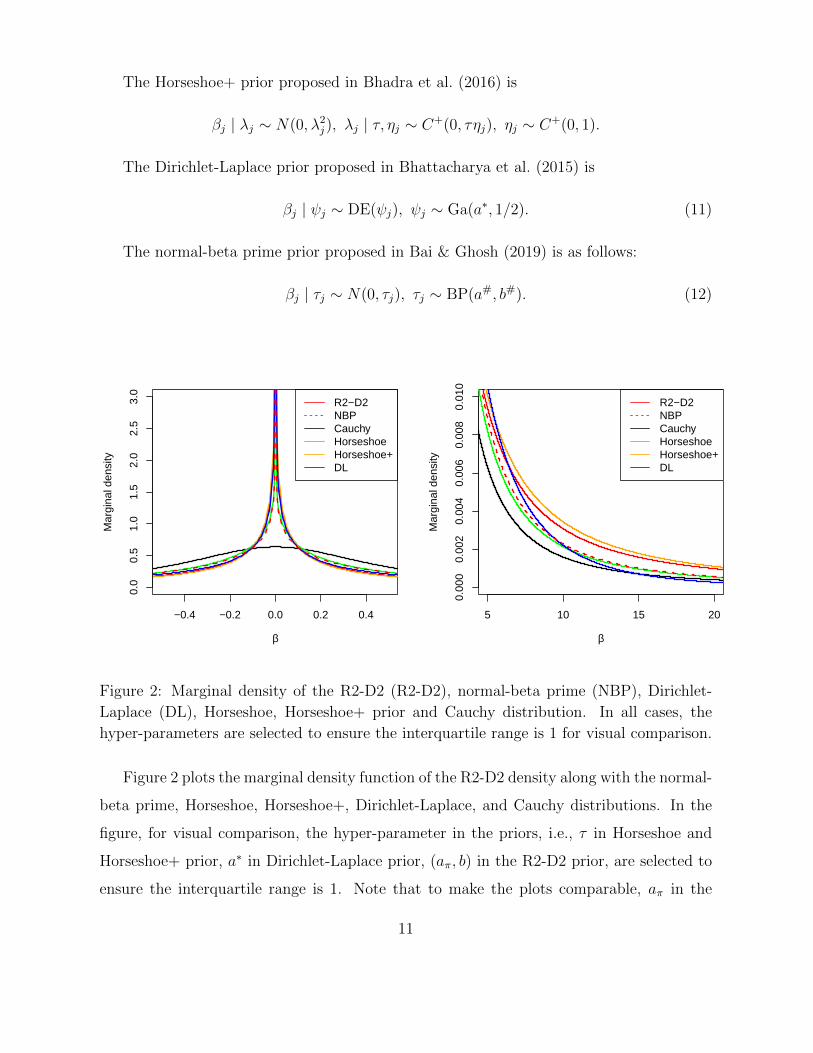
Figure 2: Marginal density of the R2-D2 (R2-D2), normal-beta prime (NBP), Dirichlet-
Laplace (DL), Horseshoe, Horseshoe+ prior and Cauchy distribution. In all cases, the
hyper-parameters are selected to ensure the interquartile range is 1 for visual comparison.
Figure 2 plots the marginal density function of the R2-D2 density along with the normal-
beta prime, Horseshoe, Horseshoe+, Dirichlet-Laplace, and Cauchy distributions. In the
figure, for visual comparison, the hyper-parameter in the priors, i.e., τ in Horseshoe and
Horseshoe+ prior, a∗ in Dirichlet-Laplace prior, (aπ, b) in the R2-D2 prior, are selected to
ensure the interquartile range is 1. Note that to make the plots comparable, aπ in the
11
proposed R2-D2 prior is set as a∗/2, which is half of the hyper-parameter in the Dirichlet-
Laplace prior. It will be shown later that this results in the same behavior around the
origin for the two priors. The other hyper-parameter b in the R2-D2 prior is then tuned to
ensure the interquartile range of 1 to match the others. For the normal-beta prime prior,
we follow the values in Bai & Ghosh (2019), i.e., a# = 0.48 and b# = 0.52 which also
ensures an interquartile range of 1.
From the plot, it appears that the R2-D2 prior can obtain both the highest concentration
around zero and heaviest tail simultaneously. We will quantify these rates exactly in the
next subsection, in Table 1. In particular, we will see that the R2-D2 prior is the only one
obtaining polynomial behavior in both regions.
In the normal means model, van der Pas et al. (2014) and van der Pas et al. (2017a)
investigate the Horseshoe posterior contraction rate, Bhattacharya et al. (2015) shows the
optimal posterior concentration results for Dirichlet-Laplace prior, Bhadra et al. (2016)
proves that the Horseshoe+ posterior concentrates at a faster rate than Horseshoe in the
Kullback-Leibler sense, and Bai & Ghosh (2019) shows that normal-beta prime prior leads
to a near minimax posterior concentration rate.
In this paper, we examine the concentration around zero and tail behaviors of the
marginal densities of a number of priors, and show that our proposed approach simulta-
neously achieves high concentration at the origin and heavy tails. We will also study the
posterior consistency and contraction properties in the high-dimensional regression model
setup. As shown in Figure 2, all five global-local shrinkage priors have a marginal density
with a singularity at zero while with different concentration rate. Except for the Dirichlet-
Laplace prior, all other priors’ marginal density have a heavier tail than the Cauchy dis-
tribution. We formally investigate their marginal densities’ properties in the following
sections.
4.2.1 Asymptotic tail behaviors
We examine the behavior of the tails of the proposed R2-D2 prior in this section. A prior
with heavy tails is desirable in high-dimensional regression to allow the posterior to estimate
12
large values for important predictors.
Theorem 1. Given |β| → ∞, for any aπ > 0 and b > 0, the marginal density of the
R2-D2 prior (9) satisfies πR2-D2(β) = O(1/|β|2b+1). Furthermore, when 0 < b < 1/2,
lim|β|→∞ πR2-D2(β)/β−2 = ∞, i.e., the R2-D2 prior has heavier tails than the Cauchy dis-
tribution.
With a polynomial tail heavier than Cauchy distribution, the proposed R2-D2 prior
attains a substantial improvement over a large class of global-local shrinkage priors.
As a comparison, we study the tail behavior of the Dirichlet-Laplace and double Pareto
prior. The density of generalized double Pareto prior proposed in Armagan, Dunson & Lee
(2013) is
πGDP(βj | η, α) = (1 + |βj|/η)−(α+1)/(2η/α), (α, η > 0).
Theorem 2. Given |β| → ∞, for any α > 0, the marginal density of the general-
ized double Pareto prior satisfies πGDP(β) = O(1/|β|α+1). Furthermore, when α < 1,
lim|β|→∞ πGDP(β)/β−2 =∞, i.e., the double Pareto prior has heavier tails than the Cauchy
distribution.
Theorem 3. Given |β| → ∞, for any a∗ > 0, the marginal density of the Dirichlet-
Laplace prior as shown in (11) satisfies πDL(β) = O(|β|a∗/2−3/4/exp{√
2|β|}). Further-
more, lim|β|→∞ πDL(β)/β−2 = 0, i.e., the Dirichlet-Laplace prior has lighter tails than the
Cauchy distribution.
As noted in Carvalho et al. (2010), the Horseshoe prior has exact Cauchy-like tails that
decay like β−2, and the Horseshoe+ prior has a tail of O(log(|β|)/β2) as illustrated in the
proof of Theorem 4.6 in Bhadra et al. (2016). Therefore, the double Pareto prior and the
proposed R2-D2 prior lead to the heaviest tail, followed by Horseshoe+, then Horseshoe,
and finally Dirichlet-Laplace prior.
4.2.2 Concentration properties
In this section, we study the concentration properties of the R2-D2 prior around the origin.
The concentration properties of Dirichlet-Laplace, Horseshoe, and Horseshoe+ priors are
13

also given. We favor priors with high concentration near zero to reflect the prior that most
of the covariates do not have a substantial effect on the response. We now show that R2-D2
prior has higher concentration at zero to go along with heavier tails than other global-local
priors.
Theorem 4. As |β| → 0, if 0 < aπ < 1/2 and b > 0, the marginal density of the R2-D2
prior as shown in (9) satisfies πR2-D2(β) = O(1/|β|1−2aπ).
Theorem 5. As |β| → 0, if 0 < a∗ < 1, the marginal density of the Dirichlet-Laplace prior
as shown in (11) satisfies πDL(β) = O(1/|β|1−a∗).
For the Horseshoe prior, as summarized in Carvalho et al. (2010), the marginal density
πHS(β) = (2π3)−1/2 exp(β2/2)E1(β2/2), where E1(z) =∫∞
1e−tz/t dt is the exponential
integral function. As |β| → 0,
1
2(2π3)1/2log(1 +
4
β2) ≤ πHS(β) ≤ 1
(2π3)1/2log(1 +
2
β2).
Therefore around the origin, πHS(β) = O(log(1/|β|)). Also by the proof of Theorem 4.6
in Bhadra et al. (2016), as |β| → 0, the marginal density of Horseshoe+ prior satisfies
πHS+(β) = O(log2(1/|β|)).
It is clear that 2aπ in the R2-D2 prior plays the same role around the origin as aD
in the Dirichlet-Laplace prior. Accordingly, when a∗ = 2aπ ∈ (0, 1), all these four priors
possess unbounded density near the origin. However, the R2-D2 prior and Dirichlet-Laplace
prior diverge to infinity with a polynomial order, much faster than the Horseshoe+ (with
a squared logarithm order) and the Horseshoe prior (with a logarithm order). Although
the double Pareto prior also has a polynomial order tail similar as our proposed R2-D2
prior, the double Pareto prior differs around the origin, as it remains bounded, while our
proposed R2-D2 prior is unbounded at the origin. As for the normal-beta prime prior, we
show that its concentration rate is slower than the R2-D2 prior.
The results for all priors in both tail behavior and concentration around zero are sum-
marized in Table 1. The proposed R2-D2 prior is the only one that can achieve polynomial
rates both in the tails as well as around zero. This is the limiting case in that it can then
be arbitrarily close to the boundary case of 1/|β| in each region.
14

Tail Decay Concentration at zero
Horseshoe O(
1β2
)O(
log( 1|β|))
Horseshoe+ O(
log |β|β2
)O(
log2( 1|β|))
Dirichlet-Laplace O
(|β|a∗/2−3/4
exp{√
2|β|}
)O(
1|β|1−a∗
)Generalized Double Pareto O
(1
|β|1+α
)O(1)
R2-D2 O(
1|β|1+2b
)O(
1|β|1−2aπ
)Table 1: Tail behavior and concentration around zero for Horseshoe, Horseshoe+, Dirichlet-
Laplace, Generalized Double Pareto, and R2-D2 priors.
4.2.3 Consistency and contraction of R2-D2 Posterior
In what follows, we rewrite p as pn to indicate the dimension of βn can increase with the
sample size n. We denote the true regression parameter as β0n. Let qn be the number of
nonzero components in β0n. We use || · || as the L2 norm, and || · ||1 as L1 norm for vectors,
respectively. Denote Yn = (Y1, · · · , Yn)T . Denote Xn = (xT1 , · · · ,xTn )T . Let ξn denote a set
of indices where ξn ⊂ {1, · · · , pn}, and let Xξn denote the sub-matrix of Xn that contains
the columns with indices in ξn. Denote ξ0n as the set containing the nonzero indices of β0
n.
For two positive sequences an and bn, an � bn means 0 < lim inf an/bn ≤ lim sup an/bn <∞;
an ≺ bn means an = o(bn); an � bn means bn = o(an); an � bn means either an ≺ bn or
an � bn; and an � bn means either an � bn or an � bn.
We now show that the proposed R2-D2 prior yields strong posterior consistency in the
case that pn ≺ n, and further that it attains the optimal near-minimax contraction rate in
general, including with pn � n, as given by Castillo et al. (2015), Song & Liang (2017) and
Rockova & George (2018).
Theorem 6 shows strong posterior consistency under pn = o(n), and assumes the fol-
lowing regularity conditions:
(A1) pn ≺ n;
(A2) Let dpn and d1 be the smallest and the largest singular values ofXTnXn/n respectively.
15

Assume 0 < dmin < lim infn→∞ dpn ≤ lim supn→∞ d1 < dmax < ∞, where dmin and
dmax are fixed;
(A3) maxj=1,··· ,pn{|β0nj|} ≤ En for some nondecreasing sequence, En, with log(En) =
O(log n);
(A4) qn = o(n/ log n).
Theorem 6. Under assumptions (A1)–(A4), for any b > 0, given the linear regression
model (1) with known σ2, if aπ = C/(pb/2n nrb/2 log n) for finite r > 0 and C > 0, then the
R2-D2 prior (9) yields a strongly consistent posterior, i.e., for any ε > 0,
Prβ0n
{πn(βn : ||βn − β0
n|| ≥ ε | Yn)→ 0}
= 1 as n→∞.
Theorem 6 shows the posterior strong consistency of the R2-D2 prior under pn ≺ n.
Furthermore, in the high dimensional case, with pn � n, we place an inverse-Gamma prior
on σ2, and denote σ0 as the true parameter value which is unknown but fixed. Theorem 7
shows that the R2-D2 prior contracts at the near-minimax rate in this regime, under the
following regularity conditions:
(B1) All the covariates are uniformly bounded. For simplicity, we assume they are all
bounded by 1;
(B2) pn � n;
(B3) There exists some integer pn and fixed constant d0 such that pn � qn and the smallest
singular value of matrix XTξnXξn/n is no smaller than d0 for any subset model of size
|ξn| ≤ pn;
(B4) maxj=1,...,pn{|β0nj/σ
0|} ≤ En for some nondecreasing sequence, En, with log(En) =
O(log pn).
(B5) qn = o(n/ log pn);
Theorem 7. Assume that (B1)-(B5) hold. Denote εn = M√qn(log pn)/n where M > 0 is
sufficiently large, and let kn �√qn(log pn)/n/pn. Given the linear regression model (1),
16

suppose that we place an inverse-Gamma prior on σ2 and place the R2-D2 prior (9) on β.
For any b > 0, if aπ ≤ log (1− p−1+un )/(2 log kn) where u > 0, then the following hold:
Prβ0n
{πn(βn : ||βn − β0
n|| ≥ c1σ0εn | Yn) ≥ e−c2nε
2n
}≤ e−c3nε
2n ,
Prβ0n
{πn(βn : ||βn − β0
n||1 ≥ c1σ0√qnεn | Yn) ≥ e−c2nε
2n
}≤ e−c3nε
2n ,
Prβ0n
{πn(βn : ||Xnβn −Xnβ
0n|| ≥ c1σ
0√nεn | Yn) ≥ e−c2nε
2n
}≤ e−c3nε
2n ,
for some positive constants c1, c2, and c3.
According to Raskutti et al. (2011), the minimax L2 rate is O(√qn log(pn/qn)/n). For
the R2-D2 prior, the L2 and L1 contraction rates for the posterior of βn areO(√qn(log pn)/n)
and O(qn√
(log pn)/n), respectively. So the contraction rates of R2-D2 prior are near-
minimax. Note that these rates are the same as the rates achieved by spike-and-slab
approaches as in Castillo et al. (2015), Song & Liang (2017) and Rockova & George (2018).
We note that Theorem 6 shows strong consistency in the pn ≺ n regime, while Theorem
7 shows the contraction rate for pn � n. While, the result in Theorem 7 is stronger,
including stronger conditions on the hyperparameters, we do conjecture that the near-
minimax contraction rate will also hold in the case of pn ≺ n, with a condition on the
hyperparameters that is weaker than that of Theorem 7. As also pointed out in Song &
Liang (2017), in this case it is not necessary to require a strong prior concentration which
is ensured by the conditions of Theorem 7, and one only need to impose conditions on the
local shape of the prior around the true β0.
4.2.4 Choice of Hyperparameters
Based on these properties, we now discuss a default choice of hyperparameters that can be
implemented in practice. We set aπ = a/p throughout, which is not as a choice, but it is an
important step in the definition of the prior. The reason for this very specific relationship
is to ensure that the R2-D2 prior in (8) can be re-written as (9) and (10). The theoretical
properties are derived based on (9) (or (10)), hence they assume this specific form of aπ, as
any other choice would no longer yield the same theoretical results. In addition, it ensures
17
that the MCMC algorithm is fully Gibbs sampling. With any other choice of aπ, this would
not be the case, and a Metropolis step would be needed in the algorithm.
Hence there are then two parameters to set, a and b. Based on the consistency results,
we suggest to set a as a function of b based on the condition of Theorem 6. This leads to just
one tuning parameter b. This determines the tail behavior and then all other parameters
are fixed from that. For a fully default method, we set b = 0.5 to yield Cauchy-like tails,
but other choices of tail behavior are possible if desired.
To determine a and aπ from a choice of b, note that the condition for consistency in
Theorem 6 requires that aπ = C/(pb/2n nrb/2 log n), where C and r are arbitrary constants.
For a default approach, given the choice of b, we set aπ exactly at C/(pb/2n nrb/2 log n)
choosing the arbitrary constants C and r each to be 1. This is now the default choice and
has been implemented in all of the examples to follow.
5 Posterior Computation
In this section we develop novel Markov chain Monte Carlo (MCMC) samplers for both
the conditional and marginal R2-D2 approaches. The development of these samplers are
of interest directly on their own, as after some transformation and reparametrization, we
are able to obtain efficient feasible methods. In particular, the marginal version and the
conditional uniform on ellipsoid version allow for fully Gibbs samplers. The conditional
version with local shrinkage requires a Metropolis-Hastings sampler and we show how to
sample from this posterior even in the case where p > n and hence XTX is not full rank.
5.1 Gibbs Sampler for the Conditional Uniform-on-Ellipsoid Prior
In Proposition 2, we showed that β | σ2 has a mixture of normals representation for a ≤ p/2.
In practice, we recommend choosing a = p/n as a default, and hence this applies as long
as n > 1. If σ2 is Inverse-Gamma(a1, b1) distributed, then β, σ2, z and w are drawn from
their full conditional distributions in the Gibbs sampler described as follows:
(a) Set initial values for β, σ2, z and w.
18

(b) Sample w | β, σ2, z, by first sampling u ∼ Gamma(p/2− a, βTXTXβ/ (2gσ2)
), and
setting w = 1/(1 + u).
(c) Sample z | β, σ2, w ∼ Inverse-Gamma(p/2 + b, βTXTXβ/ (2wσ2) + 1/2
).
(d) Sample σ2 | β, z, w ∼ Inverse-Gamma((n+ p)/2 + a1, SSE/2 + βTXTXβ/ (2wz) + b1
),
where SSE = (y −Xβ)T (y −Xβ).
(e) Sample β | σ2, z, w ∼ Normal(cβLS, cσ
2(XTX)−1)
, where c = zwzw+1
is the shrinkage
factor, and βLS is the least-squares estimate of β.
(f) Repeat steps b-e until convergence.
5.2 MCMC for the Conditional Local Shrinkage Model
5.2.1 Full-rank case
We now develop a novel MCMC algorithm for the local shrinkage model, sampling from the
full conditionals using a Metropolis-Hastings sampler. First, we take the eigen-decomposition
of ΣX = XTX/n = V DV T , where Vp×p is an orthogonal matrix of eigenvectors, andDp×p
is a diagonal matrix of eigenvalues. R2 is transformed such that θ = R2/(1−R2) has a
Beta-Prime (or Inverted-Beta distribution), with density p(θ) = θa−1 (1 + θ)−a−b /B(a, b).
We also transform β to lie on the unit sphere conditional on the other variables; that is,
γ = D1/2V Tβ/√θσ2. Then γ|Λ has a Bingham distribution, and we can write the full
model as follows.
y | γ, σ2, θ ∼ Nn
(√θσ2XVD−1/2γ, σ2I
)γ | Λ ∼ Bingham
(D−1/2V TΛ−1V D−1/2
)σ2 ∼ Inverse-Gamma(a1, b1)
θ ∼ Beta-Prime(a, b)
λj ∼ Gamma(ν, µ), for j = 1, . . . , .p
19
This parametrization of the prior models the direction of β independently of σ2 and R2.
However, the Bingham distribution of the direction, γ | Λ, contains an intractable normaliz-
ing constant, CX,Λ, depending onX and Λ. Specifically, CX,Λ is a confluent hypergeometric
function with matrix argument A = D−1/2V TΛ−1V D−1/2/2.
The full conditional posterior distribution of γ is a Fisher-Bingham(µ,A) distribution
(Kent 1982), where µ = yTXVD−1/2√θ/σ2. This is equivalent to a Np(A
−1µ,A−1) dis-
tribution conditioned to lie on the p−1 dimensional unit sphere. We sample from this using
the rejection sampler proposed by Kent et al. (2013) with an Angular Central Gaussian
(ACG) envelope distribution. Sampling efficiently from the ACG distribution is possible
because it is just the marginal unit direction of a multivariate Normal distribution with
mean 0, and thus only requires draws from a Normal distribution. Any standard MCMC
algorithm can sample θ and σ2, but the Adaptive Metropolis algorithm (Haario et al. 2001)
automatically accounts for the strong negative correlation between the parameters without
the need for manual tuning. A bivariate Normal proposal distribution is used for (σ2, θ)
with covariance proportional to the running covariance of the samples during the burn-in
phase.
The density function of the full conditional posteriors for variance parameters, λj, al-
most have Generalized Inverse Gaussian distributions (GIG) if it were not for the intractable
term CX,Λ. A Metropolis-Hastings algorithm would require computing this quantity. Our
solution is to propose each candidate λ∗j from a GIG distribution, and introduce auxil-
iary variables, γ∗|Λ∗, from a Bingham distribution in which the constant, CX,Λ∗ , appears
in the density. We calculate the Metropolis-Hastings acceptance probability for (Λ∗,γ∗),
and since CX,Λ∗ appears in the posterior and the proposal distribution, we avoid comput-
ing it. This is the so-called “Exchange Algorithm” proposed by Murray et al. (2006) for
doubly-intractable distributions, and also used by Fallaize & Kypraios (2016) for Bayesian
inference of the Bingham distribution.
The entire sampler for the local shrinkage model is described as follows:
(a) Set initial values for γ, σ2, θ, and Λ.
(b) Sample γ | Λ from a Fisher-Bingham(µ,A) distribution, where µ = yTXVD−1/2√θ/σ2
20

and A = D−1/2V TΛ−1V D−1/2/2.
(c) Sample (σ2, θ) jointly using an Adaptive Metropolis algorithm from a bivariate Nor-
mal distribution.
(d) Exchange algorithm to sample Λ:
(i) Sample λ∗j | uj ∼ GIG(ν, 2µ, u2j), for j = 1, . . . , p, where u = V D−1/2γ.
(ii) Sample u∗ from a Bingham(A∗) distribution, whereA∗ = D−1/2V TΛ∗−1V D−1/2/2
(iii) Accept (Λ∗,u∗) with probability:
p(Λ∗|u)
p(Λ|u)× q(Λ|u)
q(Λ∗|u)× q(u∗|Λ)
q(u∗|Λ∗)= exp
{p∑j=1
u∗2j(1/λ∗2j − 1/λ2
j
)}
(e) Repeat steps (b)-(d) until convergence, and calculate β =√θσ2V D−1/2γ for each
sample.
In step (d), p(Λ | u) is the conditional posterior distribution of Λ; q(Λ | u) is the GIG
proposal distribution with density: p(x; d, a, b) ∝ xd−1exp {−(ax+ b/x)/2},
for −∞ < d < ∞, and a, b > 0; and q(u | Λ) is the Bingham proposal distribution which
has the same constant as in p(Λ | u). We only need to keep Λ∗ at each step, and can
discard u∗. We can efficiently sample from the Bingham distribution because it is a special
case of the Fisher-Bingham with µ = 0 (Kent et al. 2013). All modeling is done in terms
of γ, σ2, θ and Λ, and we calculate β outside the sampler.
5.2.2 Non full-rank case
Next we address how to fit these models with high-dimensional data, where p > n and
XTX is not full rank. The restriction on β : βTΣXβ = σ2θ, is no longer an ellipsoid,
but an unbounded subspace in p-dimensions (e.g. parallel lines for p = 2, and an infinite
cylinder for p = 3). We assume that the rank(X) = n, and partition D =(D1 00 0
)and
V = (V1,V2). Note that D1 is the n× n diagonal matrix of positive eigenvalues, V1 is the
matrix of corresponding eigenvectors, and V2 is the matrix of the p−n eigenvectors spanning
the null space of X. We define γ = (γ1,γ2)T = (D1/21 V T
1 β,VT
2 β)T/√θσ2, so that γ is
21

multivariate Normal with the constraint that γT1 γ1 = 1. Marginally, γ1 = D1/21 V T
1 β/√θσ2
is defined on the n − 1 dimensional unit sphere, and has a Fisher-Bingham distribution
just like the full rank case. However, the reverse transformation β =√θσ2V1D
−1/21 γ1
is defined on the lower n − 1 dimensional ellipsoid within the entire constrained space
{β : βTΣXβ = σ2θ}. For example, if p = 3 and n = 2, this is the slice of the 3-dimensional
ellipsoid with the minimum L2-norm. The problem is that this lower dimensional ellipsoid
may not be able to favor the sparsity or local shrinkage encouraged by Λ. That would
be equivalent to principal components regression using the top n principal components.
To allow for shrinkage of the original coefficients and not the principal components, we
sample γ2 | γ1, which is multivariate Normal, and make the reverse transformation β =√θσ2
(V1D
−1/21 γ1 + V2γ2
). Since V2 spans the null space ofX, β is still in the constrained
region, but offers more flexibility in shrinking βj.
5.3 Gibbs Sampler for Marginal R2-D2
For posterior computation in the marginal case, the following equivalent representation is
useful. The R2-D2 prior (8) is equivalent to
βj | σ2, ψj, φj, ω ∼ N(0, ψjφjωσ2/2), ψj ∼ Exp(1/2),
φ ∼ Dir(aπ, · · · , aπ), ω | ξ ∼ Ga(a, ξ), ξ ∼ Ga(b, 1), (13)
where Exp(δ) denotes the exponential distribution with mean δ−1. The Gibbs sampling
procedure is based on (13) with a = paπ. Denote Z ∼ InvGaussian(µ, λ), if π(z) =
λ1/2(2πz3)−1/2
exp{−λ(z − µ)2/(2µ2z)}. Denote Z ∼ giG(χ, ρ, λ0), the generalized inverse
Gaussian distribution (Seshadri 1997), if π(z) ∝ zλ0−1exp{−(ρz + χ/z)/2}.
The Gibbs sampling procedure is as follows:
(a) Set initial values for β, σ2,ψ,φ, and ω.
(b) Sample β | ψ,φ, ω, σ2,Y ∼ N(µ, σ2V ), where µ = V XTY = (XTX+S−1)−1(XTY ),
V = (XTX + S−1)−1, S = diag{ψ1φ1ω/2, · · · , ψpφpω/2}, X = (x1, · · · ,xn)T , and
Y = (Y1, · · · , Yn)T .
22

(c) Sample σ2 | β,ψ,φ, ω,Y ∼ IG(a1 + (n + p)/2, b1 + (βTS−1β + (Y −Xβ)T (Y −
Xβ))/2).
(d) Sample ψ | β,φ, ω, σ2. Draw ψj−1 ∼ InvGaussian(µj =
√σ2φjω/2/|βj|, λ = 1), then
take the reciprocal to get ψj.
(e) Sample ω | β,ψ,φ, ξ, σ2 ∼ giG(χ =p∑j=1
2β2j /(σ
2ψjφj), ρ = 2ξ, λ0 = a− p/2).
(f) Sample ξ | ω ∼ Ga(a+ b, 1 + ω).
(g) Sample φ | β,ψ, ξ, σ2. Motivated by Bhattacharya et al. (2015), if a = paπ, one can
draw T1, · · · , Tp independently with Tj ∼ giG(χ = 2β2j /(σ
2ψj), ρ = 2ξ, λ0 = aπ−1/2).
Then set φj = Tj/T with T =p∑j=1
Tj.
(h) Repeat steps (b)-(g) until convergence.
6 Simulation Study
We conduct a simulation study to compare the proposed approach with other Bayesian
regression models. In each setting, 200 datasets are simulated from the homoscedastic
linear model (1), with sample size n = 60, and the number of predictors p varying in
p ∈ {50, 100, 500, 2000}. Larger sample sizes were also investigated with the compar-
isons remaining similar. The covariates xi, i = 1, · · · , n, are generated from multivari-
ate normal distribution with mean zero, and correlation matrix of autoregressive struc-
ture AR(1) with correlation ρ =0.5 or 0.9. For the regression coefficients β, we set
β = (0T10,B1T ,0T30,B2
T ,0Tp−50)T with 0k representing the zero vector of length k, and B1
and B2 each of length 5 nonzero elements. The fractions of true coefficients with exactly
zero values are 80%, 90%, 98%, and 99.5% for p ∈ {50, 100, 500, 2000}, respectively, and
the remaining 20%, 10%, 2%, and 0.5% nonzero elements B1 and B2 were independently
generated from two scenarios: (i) a Student t distribution with 3 degrees of freedom to give
heavy tails; (ii) a Uniform(0,1) distribution to give weaker signals. For scenario (i), we set
the error variance to produce a Signal-to-Noise Ratio (SNR) of 9, yielding σ2 = 10/3. Note
23
that since the generated coefficients have expectation of zero, the SNR does not depend
on the correlation structure of the covariates. For scenario (ii), the nonzero expectation
of the Uniform(0,1) then entails a different SNR for the 2 different correlation setups. For
this scenario, we set σ2 = 6 to yield SNR ≈ 0.5 and 0.7 in the ρ = 0.5 and 0.9 cases,
respectively.
To implement both the marginal and conditional R2-D2 priors, as discussed as a default
choice in Section 4.2.4, we set b = 0.5 to yield Cauchy-like tails, and aπ = C/(pb/2n nrb/2 log n)
with choosing the arbitrary constants C and r to be 1. We also set b = 0.1 to give
heavier tails (then setting aπ in the same manner). The results for b = 0.1 were similar
to b = 0.5 and thus not shown, and we recommend as a default to use b = 0.5 as a fully
automatic approach. For the conditional R2-D2, the choices of ν and µ in the Gamma prior
are based on the recommendations for implementation of Normal-Gamma priors given in
Griffin & Brown (2010). The choice is based on the degree of sparsity, which we choose as
min{n, 0.1p} so that we set the expected number of non-zero coefficients to be 10% of the
total, or the sample size, whichever is smaller. Details of how ν and µ relate to the sparsity
level are given in the Appendix.
The comparisons are made to some current state-of-the-art global-local priors: Horse-
shoe, Horseshoe+, Normal-Beta Prime and Dirichlet-Laplace.
For the Horseshoe, Dirichlet-Laplace, and Normal-Beta Prime, the implementation is
done via the R packages horseshoe, dlbayes, and NormalBetaPrime, respectively. The
Horseshoe+ is implemented through Stan in R using the code provided by the author of
Bhadra et al. (2016). The proposed R2-D2 approaches are implemented in R, based on the
discussed MCMC sampling.
In all cases, 10, 000 samples are collected with the first 5, 000 samples discarded as
burn-in.
Estimation error and AUC. The average sum of squared error corresponding to the
posterior mean across the 200 replicates is provided in Table 2 for simulation setting i for
p =100 and 500 and in Table 3 for simulation setting ii. In addition, the averaged area
under the Receiver-Operating Characteristic (ROC) curve (AUC) based on the posterior
24
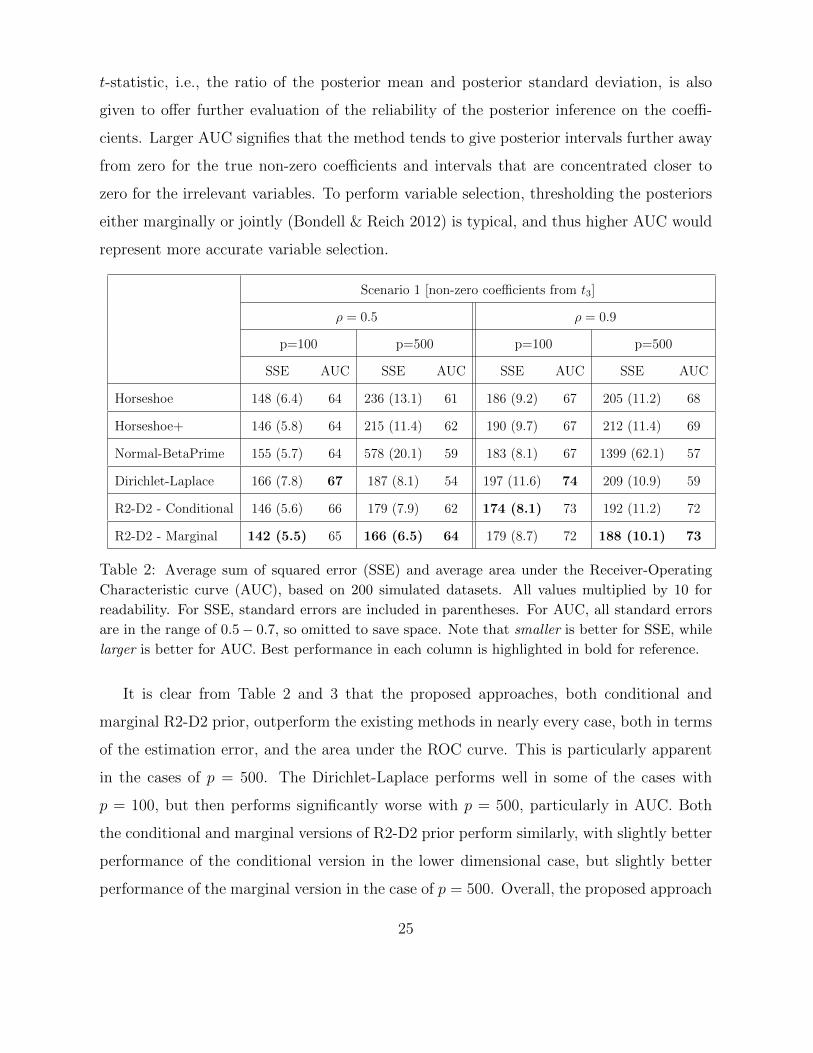
t-statistic, i.e., the ratio of the posterior mean and posterior standard deviation, is also
given to offer further evaluation of the reliability of the posterior inference on the coeffi-
cients. Larger AUC signifies that the method tends to give posterior intervals further away
from zero for the true non-zero coefficients and intervals that are concentrated closer to
zero for the irrelevant variables. To perform variable selection, thresholding the posteriors
either marginally or jointly (Bondell & Reich 2012) is typical, and thus higher AUC would
represent more accurate variable selection.
Scenario 1 [non-zero coefficients from t3]
ρ = 0.5 ρ = 0.9
p=100 p=500 p=100 p=500
SSE AUC SSE AUC SSE AUC SSE AUC
Horseshoe 148 (6.4) 64 236 (13.1) 61 186 (9.2) 67 205 (11.2) 68
Horseshoe+ 146 (5.8) 64 215 (11.4) 62 190 (9.7) 67 212 (11.4) 69
Normal-BetaPrime 155 (5.7) 64 578 (20.1) 59 183 (8.1) 67 1399 (62.1) 57
Dirichlet-Laplace 166 (7.8) 67 187 (8.1) 54 197 (11.6) 74 209 (10.9) 59
R2-D2 - Conditional 146 (5.6) 66 179 (7.9) 62 174 (8.1) 73 192 (11.2) 72
R2-D2 - Marginal 142 (5.5) 65 166 (6.5) 64 179 (8.7) 72 188 (10.1) 73
Table 2: Average sum of squared error (SSE) and average area under the Receiver-Operating
Characteristic curve (AUC), based on 200 simulated datasets. All values multiplied by 10 for
readability. For SSE, standard errors are included in parentheses. For AUC, all standard errors
are in the range of 0.5− 0.7, so omitted to save space. Note that smaller is better for SSE, while
larger is better for AUC. Best performance in each column is highlighted in bold for reference.
It is clear from Table 2 and 3 that the proposed approaches, both conditional and
marginal R2-D2 prior, outperform the existing methods in nearly every case, both in terms
of the estimation error, and the area under the ROC curve. This is particularly apparent
in the cases of p = 500. The Dirichlet-Laplace performs well in some of the cases with
p = 100, but then performs significantly worse with p = 500, particularly in AUC. Both
the conditional and marginal versions of R2-D2 prior perform similarly, with slightly better
performance of the conditional version in the lower dimensional case, but slightly better
performance of the marginal version in the case of p = 500. Overall, the proposed approach
25
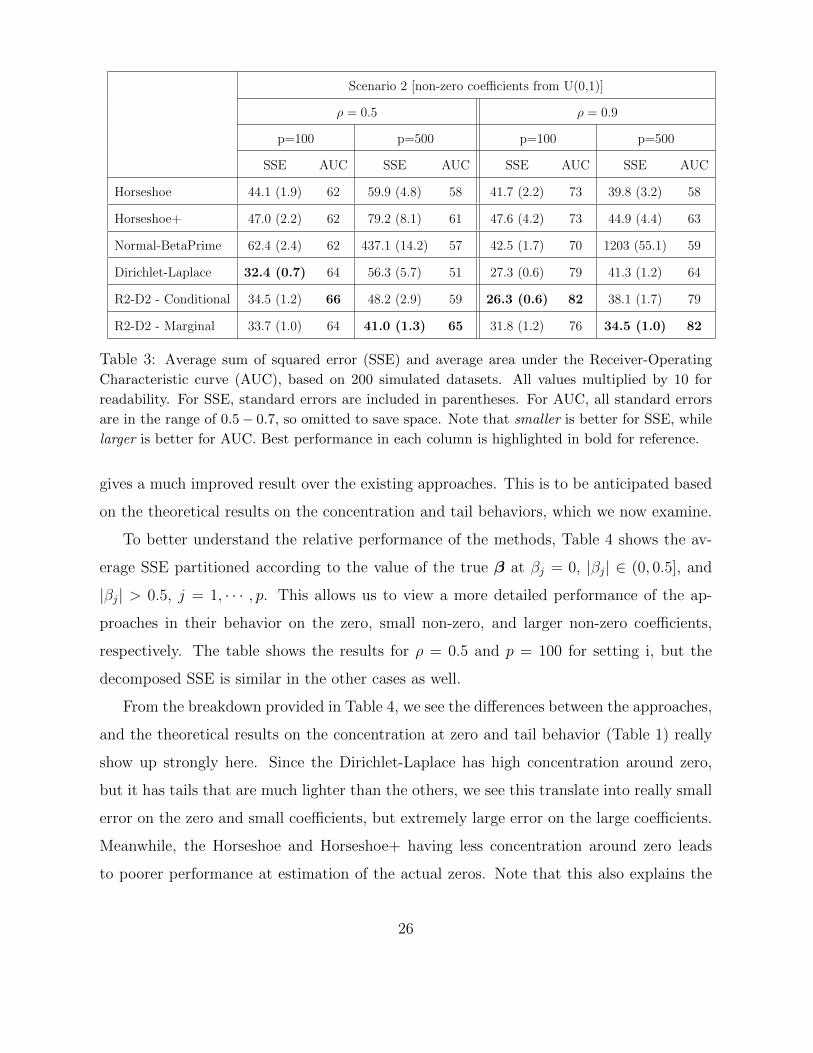
Scenario 2 [non-zero coefficients from U(0,1)]
ρ = 0.5 ρ = 0.9
p=100 p=500 p=100 p=500
SSE AUC SSE AUC SSE AUC SSE AUC
Horseshoe 44.1 (1.9) 62 59.9 (4.8) 58 41.7 (2.2) 73 39.8 (3.2) 58
Horseshoe+ 47.0 (2.2) 62 79.2 (8.1) 61 47.6 (4.2) 73 44.9 (4.4) 63
Normal-BetaPrime 62.4 (2.4) 62 437.1 (14.2) 57 42.5 (1.7) 70 1203 (55.1) 59
Dirichlet-Laplace 32.4 (0.7) 64 56.3 (5.7) 51 27.3 (0.6) 79 41.3 (1.2) 64
R2-D2 - Conditional 34.5 (1.2) 66 48.2 (2.9) 59 26.3 (0.6) 82 38.1 (1.7) 79
R2-D2 - Marginal 33.7 (1.0) 64 41.0 (1.3) 65 31.8 (1.2) 76 34.5 (1.0) 82
Table 3: Average sum of squared error (SSE) and average area under the Receiver-Operating
Characteristic curve (AUC), based on 200 simulated datasets. All values multiplied by 10 for
readability. For SSE, standard errors are included in parentheses. For AUC, all standard errors
are in the range of 0.5− 0.7, so omitted to save space. Note that smaller is better for SSE, while
larger is better for AUC. Best performance in each column is highlighted in bold for reference.
gives a much improved result over the existing approaches. This is to be anticipated based
on the theoretical results on the concentration and tail behaviors, which we now examine.
To better understand the relative performance of the methods, Table 4 shows the av-
erage SSE partitioned according to the value of the true β at βj = 0, |βj| ∈ (0, 0.5], and
|βj| > 0.5, j = 1, · · · , p. This allows us to view a more detailed performance of the ap-
proaches in their behavior on the zero, small non-zero, and larger non-zero coefficients,
respectively. The table shows the results for ρ = 0.5 and p = 100 for setting i, but the
decomposed SSE is similar in the other cases as well.
From the breakdown provided in Table 4, we see the differences between the approaches,
and the theoretical results on the concentration at zero and tail behavior (Table 1) really
show up strongly here. Since the Dirichlet-Laplace has high concentration around zero,
but it has tails that are much lighter than the others, we see this translate into really small
error on the zero and small coefficients, but extremely large error on the large coefficients.
Meanwhile, the Horseshoe and Horseshoe+ having less concentration around zero leads
to poorer performance at estimation of the actual zeros. Note that this also explains the
26
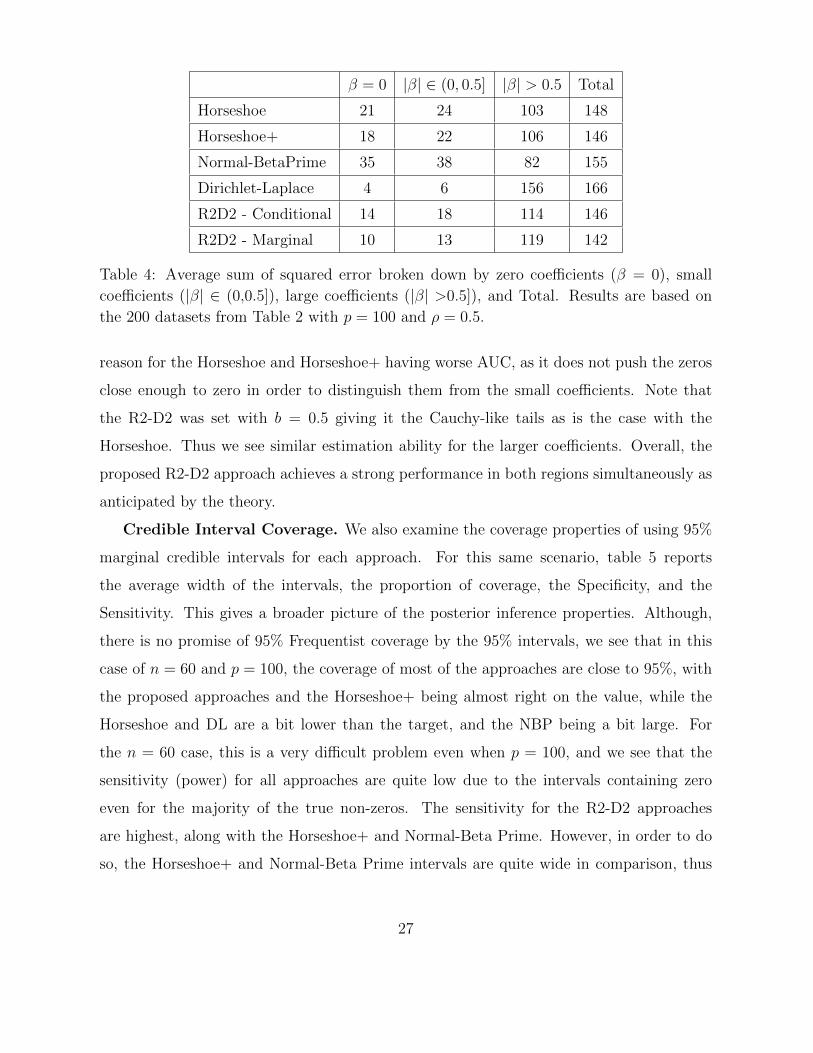
β = 0 |β| ∈ (0, 0.5] |β| > 0.5 Total
Horseshoe 21 24 103 148
Horseshoe+ 18 22 106 146
Normal-BetaPrime 35 38 82 155
Dirichlet-Laplace 4 6 156 166
R2D2 - Conditional 14 18 114 146
R2D2 - Marginal 10 13 119 142
Table 4: Average sum of squared error broken down by zero coefficients (β = 0), small
coefficients (|β| ∈ (0,0.5]), large coefficients (|β| >0.5]), and Total. Results are based on
the 200 datasets from Table 2 with p = 100 and ρ = 0.5.
reason for the Horseshoe and Horseshoe+ having worse AUC, as it does not push the zeros
close enough to zero in order to distinguish them from the small coefficients. Note that
the R2-D2 was set with b = 0.5 giving it the Cauchy-like tails as is the case with the
Horseshoe. Thus we see similar estimation ability for the larger coefficients. Overall, the
proposed R2-D2 approach achieves a strong performance in both regions simultaneously as
anticipated by the theory.
Credible Interval Coverage. We also examine the coverage properties of using 95%
marginal credible intervals for each approach. For this same scenario, table 5 reports
the average width of the intervals, the proportion of coverage, the Specificity, and the
Sensitivity. This gives a broader picture of the posterior inference properties. Although,
there is no promise of 95% Frequentist coverage by the 95% intervals, we see that in this
case of n = 60 and p = 100, the coverage of most of the approaches are close to 95%, with
the proposed approaches and the Horseshoe+ being almost right on the value, while the
Horseshoe and DL are a bit lower than the target, and the NBP being a bit large. For
the n = 60 case, this is a very difficult problem even when p = 100, and we see that the
sensitivity (power) for all approaches are quite low due to the intervals containing zero
even for the majority of the true non-zeros. The sensitivity for the R2-D2 approaches
are highest, along with the Horseshoe+ and Normal-Beta Prime. However, in order to do
so, the Horseshoe+ and Normal-Beta Prime intervals are quite wide in comparison, thus
27
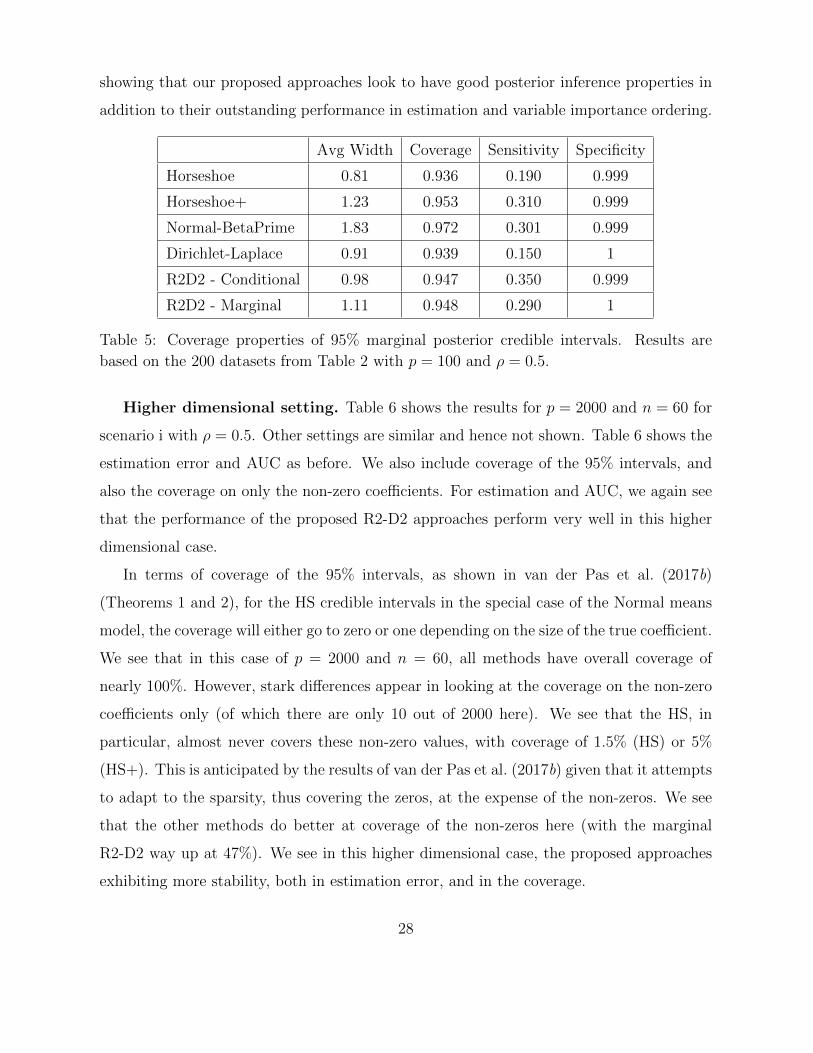
showing that our proposed approaches look to have good posterior inference properties in
addition to their outstanding performance in estimation and variable importance ordering.
Avg Width Coverage Sensitivity Specificity
Horseshoe 0.81 0.936 0.190 0.999
Horseshoe+ 1.23 0.953 0.310 0.999
Normal-BetaPrime 1.83 0.972 0.301 0.999
Dirichlet-Laplace 0.91 0.939 0.150 1
R2D2 - Conditional 0.98 0.947 0.350 0.999
R2D2 - Marginal 1.11 0.948 0.290 1
Table 5: Coverage properties of 95% marginal posterior credible intervals. Results are
based on the 200 datasets from Table 2 with p = 100 and ρ = 0.5.
Higher dimensional setting. Table 6 shows the results for p = 2000 and n = 60 for
scenario i with ρ = 0.5. Other settings are similar and hence not shown. Table 6 shows the
estimation error and AUC as before. We also include coverage of the 95% intervals, and
also the coverage on only the non-zero coefficients. For estimation and AUC, we again see
that the performance of the proposed R2-D2 approaches perform very well in this higher
dimensional case.
In terms of coverage of the 95% intervals, as shown in van der Pas et al. (2017b)
(Theorems 1 and 2), for the HS credible intervals in the special case of the Normal means
model, the coverage will either go to zero or one depending on the size of the true coefficient.
We see that in this case of p = 2000 and n = 60, all methods have overall coverage of
nearly 100%. However, stark differences appear in looking at the coverage on the non-zero
coefficients only (of which there are only 10 out of 2000 here). We see that the HS, in
particular, almost never covers these non-zero values, with coverage of 1.5% (HS) or 5%
(HS+). This is anticipated by the results of van der Pas et al. (2017b) given that it attempts
to adapt to the sparsity, thus covering the zeros, at the expense of the non-zeros. We see
that the other methods do better at coverage of the non-zeros here (with the marginal
R2-D2 way up at 47%). We see in this higher dimensional case, the proposed approaches
exhibiting more stability, both in estimation error, and in the coverage.
28
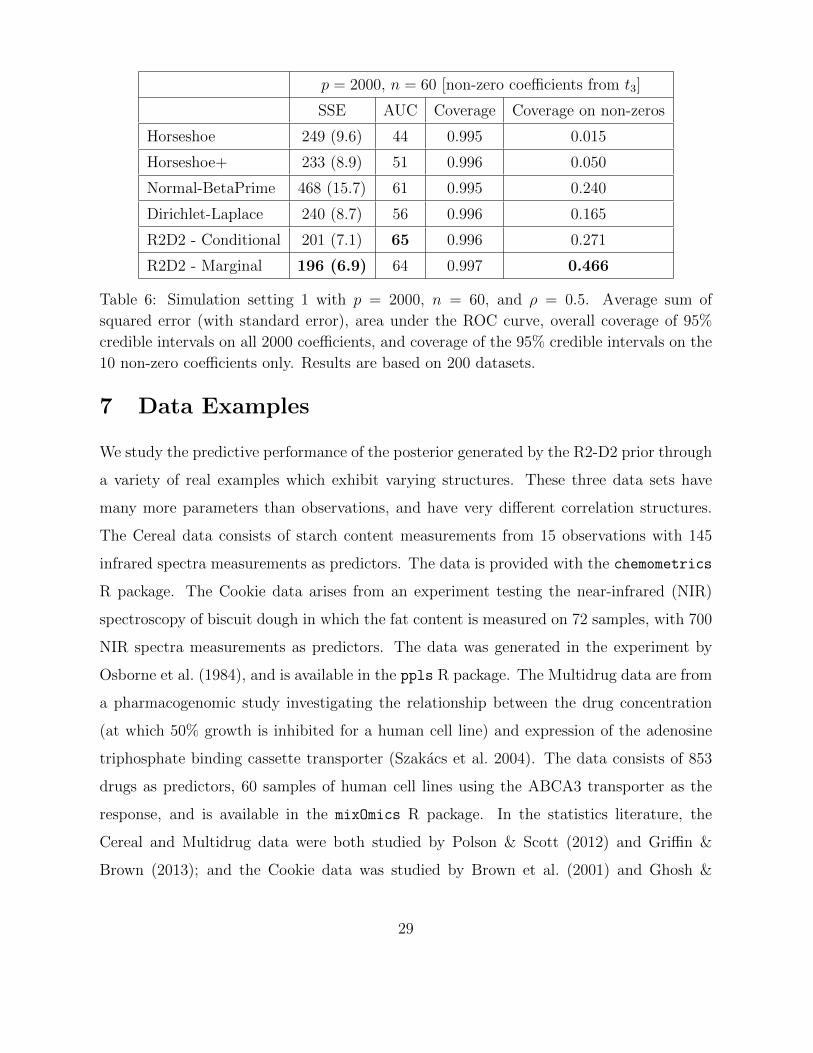
p = 2000, n = 60 [non-zero coefficients from t3]
SSE AUC Coverage Coverage on non-zeros
Horseshoe 249 (9.6) 44 0.995 0.015
Horseshoe+ 233 (8.9) 51 0.996 0.050
Normal-BetaPrime 468 (15.7) 61 0.995 0.240
Dirichlet-Laplace 240 (8.7) 56 0.996 0.165
R2D2 - Conditional 201 (7.1) 65 0.996 0.271
R2D2 - Marginal 196 (6.9) 64 0.997 0.466
Table 6: Simulation setting 1 with p = 2000, n = 60, and ρ = 0.5. Average sum of
squared error (with standard error), area under the ROC curve, overall coverage of 95%
credible intervals on all 2000 coefficients, and coverage of the 95% credible intervals on the
10 non-zero coefficients only. Results are based on 200 datasets.
7 Data Examples
We study the predictive performance of the posterior generated by the R2-D2 prior through
a variety of real examples which exhibit varying structures. These three data sets have
many more parameters than observations, and have very different correlation structures.
The Cereal data consists of starch content measurements from 15 observations with 145
infrared spectra measurements as predictors. The data is provided with the chemometrics
R package. The Cookie data arises from an experiment testing the near-infrared (NIR)
spectroscopy of biscuit dough in which the fat content is measured on 72 samples, with 700
NIR spectra measurements as predictors. The data was generated in the experiment by
Osborne et al. (1984), and is available in the ppls R package. The Multidrug data are from
a pharmacogenomic study investigating the relationship between the drug concentration
(at which 50% growth is inhibited for a human cell line) and expression of the adenosine
triphosphate binding cassette transporter (Szakacs et al. 2004). The data consists of 853
drugs as predictors, 60 samples of human cell lines using the ABCA3 transporter as the
response, and is available in the mixOmics R package. In the statistics literature, the
Cereal and Multidrug data were both studied by Polson & Scott (2012) and Griffin &
Brown (2013); and the Cookie data was studied by Brown et al. (2001) and Ghosh &
29
Ghattas (2015).
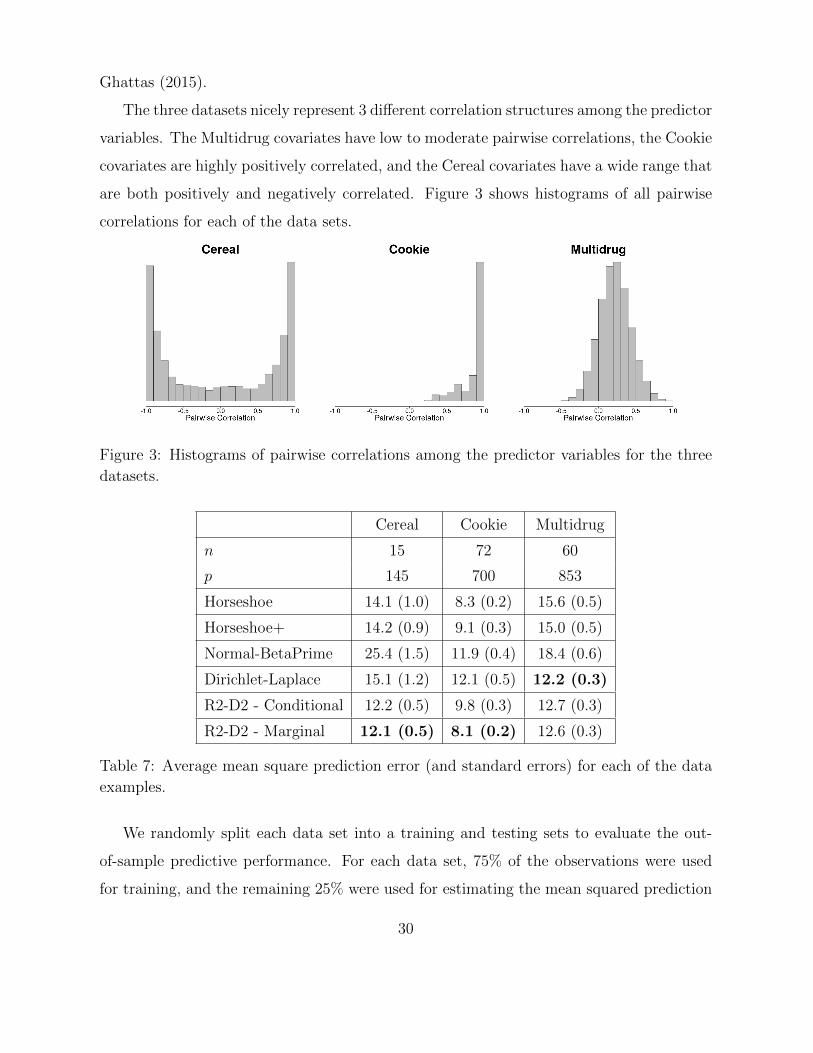
The three datasets nicely represent 3 different correlation structures among the predictor
variables. The Multidrug covariates have low to moderate pairwise correlations, the Cookie
covariates are highly positively correlated, and the Cereal covariates have a wide range that
are both positively and negatively correlated. Figure 3 shows histograms of all pairwise
correlations for each of the data sets.
Figure 3: Histograms of pairwise correlations among the predictor variables for the three
datasets.
Cereal Cookie Multidrug
n 15 72 60
p 145 700 853
Horseshoe 14.1 (1.0) 8.3 (0.2) 15.6 (0.5)
Horseshoe+ 14.2 (0.9) 9.1 (0.3) 15.0 (0.5)
Normal-BetaPrime 25.4 (1.5) 11.9 (0.4) 18.4 (0.6)
Dirichlet-Laplace 15.1 (1.2) 12.1 (0.5) 12.2 (0.3)
R2-D2 - Conditional 12.2 (0.5) 9.8 (0.3) 12.7 (0.3)
R2-D2 - Marginal 12.1 (0.5) 8.1 (0.2) 12.6 (0.3)
Table 7: Average mean square prediction error (and standard errors) for each of the data
examples.
We randomly split each data set into a training and testing sets to evaluate the out-
of-sample predictive performance. For each data set, 75% of the observations were used
for training, and the remaining 25% were used for estimating the mean squared prediction
30

error (MSPE) between the test sample and predictions. This process was repeated to create
200 data sets for each example. The same 5 approaches as in the simulations were used on
each of the datasets. Due to the various correlation structures and dimensions, this gives
a range of potential data structures for comparison of the approaches.
The average MSPE results are given in Table 7. We see that the R2-D2 approaches
consistently outperform the existing methods across the datasets. Note that the Horseshoe
and Horseshoe+ perform well on the Cookie data, but are significantly worse than the
others on the other 2 datasets.
8 Discussion
In this paper, we propose a shrinkage prior motivated by assuming a prior on R2. The
prior exhibits polynomial behavior both around the origin and in the tails and compares
favorably with other global-local shrinkage priors. Although the motivation of our R2-D2
prior is via starting with a prior on R2, the resultant prior is simply a member of the
class of global-local shrinkage priors, which can then be applied directly to other models,
as with other priors. The prior is represented by a hierarchical scale mixture of normals,
which can then be implemented in a generalized linear model or other regression setting.
The hyperparameters would no longer have the interpretation as parameters of a Beta
prior on the R2 of the model. But the form and properties of the resulting prior, such as
tail behavior and concentration around zero remain directly useable as is with the other
global-local priors.
There is scope for further advances in algorithms for MCMC sampling for these poste-
riors, just as there has been for sampling from other prior proposals, as for example, key
sampling approaches for the high-dimensional case as in Bhattacharya et al. (2016).
References
Armagan, A., Clyde, M. & Dunson, D. B. (2011), Generalized beta mixtures of Gaussians,
in ‘Advances in neural information processing systems’, pp. 523–531.
31
Armagan, A., Dunson, D. B. & Lee, J. (2013), ‘Generalized double Pareto shrinkage’,
Statistica Sinica 23(1), 119.
Armagan, A., Dunson, D. B., Lee, J., Bajwa, W. U. & Strawn, N. (2013), ‘Posterior
consistency in linear models under shrinkage priors’, Biometrika 100(4), 1011–1018.
Bai, R. & Ghosh, M. (2019), ‘Large-scale multiple hypothesis testing with the normal-beta
prime prior’, Statistics 53(6), 1210–1233.
Bateman, H. (1953), Higher Transcendental Functions [Volumes I-III], Vol. 1, McGraw-Hill
Book Company.
Bhadra, A., Datta, J., Polson, N. G. & Willard, B. (2016), ‘The horseshoe+ estimator of
ultra-sparse signals’, Bayesian Analysis .
Bhattacharya, A., Chakraborty, A. & Mallick, B. (2016), ‘Fast sampling with gaussian
scale-mixture priors in high-dimensional regression’, Biometrika 103(4), 985–991.
Bhattacharya, A., Pati, D., Pillai, N. S. & Dunson, D. B. (2015), ‘Dirichlet–laplace priors
for optimal shrinkage’, Journal of the American Statistical Association 110(512), 1479–
1490.
Bingham, C. (1974), ‘An antipodally symmetric distribution on the sphere’, The Annals of
Statistics pp. 1201–1225.
Bondell, H. D. & Reich, B. J. (2012), ‘Consistent high-dimensional bayesian variable se-
lection via penalized credible regions’, Journal of the American Statistical Association
107(500), 1610–1624.
Brown, P. J., Fearn, T. & Vannucci, M. (2001), ‘Bayesian wavelet regression on curves with
application to a spectroscopic calibration problem’, Journal of the American Statistical
Association 96(454), 398–408.
Carvalho, C. M., Polson, N. G. & Scott, J. G. (2009), Handling sparsity via the horseshoe,
in ‘International Conference on Artificial Intelligence and Statistics’, pp. 73–80.
32
Carvalho, C. M., Polson, N. G. & Scott, J. G. (2010), ‘The Horseshoe estimator for sparse
signals’, Biometrika 97, 465–480.
Castillo, I., Schmidt-Hieber, J. & van der Vaart, A. (2015), ‘Bayesian linear regression with
sparse priors’, The Annals of Statistics 43(5), 1986–2018.
DLMF (2015), ‘NIST Digital Library of Mathematical Functions’, http://dlmf.nist.gov/,
Release 1.0.10 of 2015-08-07. Online companion to Olver et al. (2010).
URL: http://dlmf.nist.gov/
Fallaize, C. J. & Kypraios, T. (2016), ‘Exact bayesian inference for the bingham distribu-
tion’, Statistics and Computing 26(1-2), 349–360.
Fields, J. L. (1972), ‘The asymptotic expansion of the Meijer G-function’, Mathematics of
Computation pp. 757–765.
George, E. I. & McCulloch, R. E. (1993), ‘Variable selection via Gibbs sampling’, Journal
of the American Statistical Association 88(423), 881–889.
Ghosh, J. & Ghattas, A. E. (2015), ‘Bayesian variable selection under collinearity’, The
American Statistician 69(3), 165–173.
Griffin, J. E. & Brown, P. J. (2010), ‘Inference with normal-gamma prior distributions in
regression problems’, Bayesian Analysis 5(1), 171–188.
Griffin, J. E. & Brown, P. J. (2013), ‘Some priors for sparse regression modelling’, Bayesian
Analysis 8(3), 691–702.
Haario, H., Saksman, E. & Tamminen, J. (2001), ‘An adaptive metropolis algorithm’,
Bernoulli pp. 223–242.
Hans, C., Dobra, A. & West, M. (2007), ‘Shotgun stochastic search for large p regression’,
Journal of the American Statistical Association 102(478), 507–516.
Ishwaran, H. & Rao, J. S. (2005), ‘Spike and slab variable selection: Frequentist and
Bayesian strategies’, Annals of Statistics pp. 730–773.
33
Johnson, N., Kotz, S. & Balakrishnan, N. (1995), ‘Continuous univariate distributions,
volume 2. john wiley&sons’, Inc., 75.
Kent, J. T. (1982), ‘The fisher-bingham distribution on the sphere’, Journal of the Royal
Statistical Society. Series B (Methodological) pp. 71–80.
Kent, J. T., Ganeiber, A. M. & Mardia, K. V. (2013), ‘A new method to simulate the
bingham and related distributions in directional data analysis with applications’, arXiv
preprint arXiv:1310.8110 .
Miller, P. D. (2006), Applied asymptotic analysis, Vol. 75, American Mathematical Soc.
Mitchell, T. J. & Beauchamp, J. J. (1988), ‘Bayesian variable selection in linear regression’,
Journal of the American Statistical Association 83(404), 1023–1032.
Murray, I., Ghahramani, Z. & MacKay, D. (2006), Mcmc for doubly-intractable distribu-
tions, in ‘Proceedings of the 22nd annual conference on uncertainty in artificial intelli-
gence’, AUAI Press, pp. 359–366.
Narisetty, N. N. & He, X. (2014), ‘Bayesian variable selection with shrinking and diffusing
priors’, The Annals of Statistics 42(2), 789–817.
Olver, F. W. J., Lozier, D. W., Boisvert, R. F. & Clark, C. W., eds (2010), NIST Hand-
book of Mathematical Functions, Cambridge University Press, New York, NY. Print
companion to DLMF (2015).
Ormerod, J. T., You, C. & Muller, S. (2017), ‘A variational bayes approach to variable
selection’, Electronic Journal of Statistics 11(2), 3549–3594.
Osborne, B. G., Fearn, T., Miller, A. R. & Douglas, S. (1984), ‘Application of near infrared
reflectance spectroscopy to the compositional analysis of biscuits and biscuit doughs’,
Journal of the Science of Food and Agriculture 35(1), 99–105.
Polson, N. G. & Scott, J. G. (2010), ‘Shrink globally, act locally: Sparse bayesian regular-
ization and prediction’, Bayesian Statistics 9, 501–538.
34
Polson, N. G. & Scott, J. G. (2012), ‘Local shrinkage rules, levy processes and regularized
regression’, Journal of the Royal Statistical Society: Series B (Statistical Methodology)
74(2), 287–311.
Raskutti, G., Wainwright, M. J. & Yu, B. (2011), ‘Minimax rates of estimation for high-
dimensional linear regression over `q-balls’, IEEE transactions on information theory
57(10), 6976–6994.
Rockova, V. & George, E. I. (2014), ‘Emvs: The em approach to bayesian variable selection’,
Journal of the American Statistical Association 109(506), 828–846.
Rockova, V. & George, E. I. (2018), ‘The spike-and-slab lasso’, Journal of the American
Statistical Association 113(521), 431–444.
Scott, S. L. & Varian, H. R. (2014), ‘Predicting the present with bayesian structural time
series’, International Journal of Mathematical Modelling and Numerical Optimisation
5(1-2), 4–23.
Seshadri, V. (1997), ‘Halphen’s laws’, Encyclopedia of statistical sciences .
Song, Q. & Liang, F. (2017), ‘Nearly optimal bayesian shrinkage for high dimensional
regression’, arXiv preprint arXiv:1712.08964 .
Szakacs, G., Annereau, J.-P., Lababidi, S., Shankavaram, U., Arciello, A., Bussey, K. J.,
Reinhold, W., Guo, Y., Kruh, G. D. & Reimers, M. (2004), ‘Predicting drug sensitivity
and resistance: profiling abc transporter genes in cancer cells’, Cancer cell 6(2), 129–137.
van der Pas, S. L., Kleijn, B. J. & van der Vaart, A. W. (2014), ‘The horsveshoe estimator:
Posterior concentration around nearly black vectors’, Electronic Journal of Statistics
8(2), 2585–2618.
van der Pas, S., Szabo, B. & van der Vaart, A. (2017a), ‘Adaptive posterior contraction
rates for the horseshoe’, Electronic Journal of Statistics 11(2), 3196–3225.
35
van der Pas, S., Szabo, B. & van der Vaart, A. (2017b), ‘Uncertainty quantification for the
horseshoe (with discussion)’, Bayesian Analysis 12(4), 1221–1274.
Zellner, A. & Siow, A. (1980), ‘Posterior odds ratios for selected regression hypotheses’,
Trabajos de estadıstica y de investigacion operativa 31(1), 585–603.
Zhang, Y. & Bondell, H. D. (2018), ‘Variable selection via penalized credible regions with
dirichlet–laplace global-local shrinkage priors’, Bayesian Analysis 13(3), 823–844.
Zhou, M. & Carin, L. (2015), ‘Negative binomial process count and mixture modeling’,
Pattern Analysis and Machine Intelligence, IEEE Transactions on 37(2), 307–320.
Zwillinger, D. (2014), Table of integrals, series, and products, Elsevier.
36

A Appendix: Technical Details
Definition of the Meijer G-function.
A general definition of the Meijer G-function is given by the following line integral in
the complex plane (Bateman 1953):
Gm,np,q
(z∣∣∣a1,...,apb1,...,bq
)=
1
2πi
∫L
∏mj=1 Γ(bj − s)
∏nj=1 Γ(1− aj + s)∏q
j=m+1 Γ(1− bj + s)∏p
j=n+1 Γ(aj − s)zs ds
where Γ(·) denotes the gamma function and L in the integral represents the path to be
followed while integrating. The definition holds under the following assumptions:
• 0 ≤ m ≤ q and 0 ≤ n ≤ p, where m,n, p and q are integer numbers
• ak − bj 6= 1, 2, 3, . . . for k = 1, 2, . . . , n and j = 1, 2 . . . ,m
• z 6= 0.
Proof of Proposition 1. Derivation of Equation (4): Let γ be uniformly distributed on
the p− 1 dimensional unit sphere. That is,
p(γ) =Γ(p/2)
2πp/21{γTγ = 1
}.
Define θ = R2
1−R2 ∼ BP(a, b). Make the transformation r =√θ:
p(γ, θ) = p(γ)p(θ) =Γ(p/2)
2πp/2B(a, b)θa−1 (1 + θ)−a−b 1
{γTγ = 1
},
and p(γ, r) =Γ(p/2)
2πp/2B(a, b)r2a−2
(1 + r2
)−a−b1{γTγ = 1
}|2r|
=Γ(p/2)
πp/2B(a, b)r2a−1
(1 + r2
)−a−b1{γTγ = 1
}.
Make the transformation z = rγ. The Jacobian is rp−1 when decomposing a vector (sup-
ported on Rp) to a radius (supported in R+) and a unit direction (supported on the p− 1
unit sphere, Sp−1), so the reciprocal Jacobian is |(zTz)p−12 |−1 = (zTz)
1−p2 . Thus,
p(z) =Γ(p/2)
πp/2B(a, b)(zTz)a−1/2
(1 + zTz
)−a−b × (zTz)1−p2
=Γ(p/2)
πp/2B(a, b)(zTz)a−p/2
(1 + zTz
)−a−b37
Finally, make the transformation β = V D−1/2zσ, so that zTz = βTXTXβ/(σ2n), where
V DV T is the eigendecomposition of XTX/n = ΣX :
p(β | σ2) =Γ(p/2)
πp/2B(a, b)
(βTXTXβ/(σ2n)
)a−p/2 (1 + βTXTXβ/(σ2n)
)−a−b |V D−1/2σ|−1
=Γ (p/2) |ΣX |1/2
B(a, b) πp/2(σ2)−a (
βTΣXβ)a−p/2 (
1 + βTΣXβ/σ2)−(a+b)
.
Proof of Proposition 2. Mixture of normals representation for a ≤ p/2.
Let β | z, w,Σ ∼ N(
0, zwσ2(XTX
)−1),
z ∼ Inverse-Gamma (b, n/2) , and
w ∼ beta (a, p/2− a) .
Define θ = 1−ww
, so θ ∼ BP(p/2 − a, a). To simplify notation let Σ = XTX/σ2 and
ΣX = XTX/n. Then we have
p(β, θ, z | Σ) = (2π)−p/2z−p/2(1 + θ)p/2|Σ|1/2 exp
{−1 + θ
2zβTΣβ
}× nb2−b
Γ(b)z−b−1 exp {−n/2z} Γ(p/2)
Γ(a)Γ(p/2− a)θp/2−a−1(1 + θ)−p/2
=2−p/2−bnb|Σ|1/2Γ(p/2)
πp/2Γ(a)Γ(b)Γ(p/2− a)z−p/2−b−1θp/2−a−1 exp
{−n+ βTΣβ + θβTΣβ
2z
},
and
p(β, z | Σ) =2−
p2−bnb|Σ|1/2Γ(p
2)
πp2 Γ(a)Γ(b)Γ(p
2− a)
z−p2−b−1 exp
{−n+ βTΣβ
2z
}∫θp2−a−1 exp
{−θβ
TΣβ
2z
}dθ
=2−a−bnb|Σ|1/2Γ(p
2)
πp2 Γ(a)Γ(b)
z−a−b−1 exp
{−n+ βTΣβ
2z
}(βTΣβ
)a− p2 .
Hence then
p(β | Σ) =2−a−bnb|Σ|1/2Γ(p/2)
πp/2Γ(a)Γ(b)
(βTΣβ
)a−p/2 ∫z−a−b−1 exp
{−n+ βTΣβ
2z
}dz
=2−a−bnb|Σ|1/2Γ(p/2)
πp/2Γ(a)Γ(b)
(βTΣβ
)a−p/2 (n+ βTΣβ
)−a−b2a+bΓ(a+ b)
=|nΣ|1/2Γ(p/2)
πp/2B(a, b)
(βTΣβ/n
)a−p/2 (1 + βTΣβ/n
)−(a+b)
=Γ (p/2) |ΣX |1/2
B(a, b)πp/2(σ2)−a (
βTΣXβ)a−p/2 (
1 + βTΣXβ/σ2)−(a+b).
38
Proof of Proposition 3. If we let Λ−1 = XTX = nV DV T , then
p(γ) = CX,Λ exp{−γTD−1/2V TV DV TV D−1/2γ/2
}1{γTγ = 1
}=
1
C1{γTγ = 1
}where the constant C =
∫1{γTγ = 1
}dγ = 2πp/2
Γ(p/2), the surface area of the a p− 1 dimen-
sional unit sphere. The rest of the proof is identical to that of Proposition 1 deriving the
distribution in (4). It is clear that β is uniform given the ellipsoid, because it’s an elliptical
distribution, but it also comes from putting a uniform distribution on γ.
Proof of Proposition 4. The proposition follows from below derivations. For ω > 0,
π(ω) =
∫ ∞0
π(ω | ξ)π(ξ)dξ =
∫ ∞0
ξa
Γ(a)ωa−1e−ξω
1
Γ(b)ξb−1e−ξdξ
=1
Γ(a)Γ(b)ωa−1
∫ ∞0
ξa+b−1e−(1+ω)ξdξ
=1
Γ(a)Γ(b)ωa−1 Γ(a+ b)
(1 + ω)a+b
=Γ(a+ b)
Γ(a)Γ(b)
ωa−1
(1 + ω)a+b.
Proof of Proposition 5 . The proposition follows from Lemma IV.3 of Zhou & Carin
(2015): Suppose y and (y1, · · · , yK) are independent with y ∼ Ga(φ, ξ), and (y1, · · · , yK) ∼
Dir(φp1, · · · , φpK), where∑K
k=1 pk = 1. Let xk = yyk, then xk ∼ Ga(φpk, ξ) independently
for k = 1, · · · , K.
Proof of Proposition 6 . The marginal density of β for the R2-D2 prior is
πR2-D2(β)
=Γ(aπ + b)
Γ(aπ)Γ(b)
∫ ∞0
1
2(λ/2)1/2exp{− |β|
(λ/2)1/2} λaπ−1
(1 + λ)aπ+bdλ
=2aπΓ(aπ + b)
Γ(aπ)Γ(b)
∫ ∞0
exp(−|β|x)x2b
(x2 + 2)aπ+bdx. (14)
39

Let µ = |β|, ν = b + 1/2, u2 = 2, and ρ = 1 − aπ − b, since |arg u| < π/2, Reµ > 0, and
Reν > 0, so we have
πR2-D2(β) =2aπΓ(aπ + b)
Γ(aπ)Γ(b)
∫ ∞0
exp(−µx)x2ν−1(x2 + u2)ρ−1 dx
=2aπΓ(aπ + b)
Γ(aπ)Γ(b)
u2ν+2ρ−2
2π1/2Γ(1− ρ)G3,1
1,3
(µ2u2
4
∣∣∣1−ν1−ρ−ν,0, 1
2
)=
2aπΓ(aπ + b)
Γ(aπ)Γ(b)
21/2−aπ
2π1/2Γ(aπ + b)G3,1
1,3
(β2
2
∣∣∣ 12−baπ− 1
2,0, 1
2
)=
1
(2π)1/2Γ(aπ)Γ(b)G3,1
1,3
(β2
2
∣∣∣ 12−baπ− 1
2,0, 1
2
)=
1
(2π)1/2Γ(aπ)Γ(b)G1,3
3,1
(2
β2
∣∣∣ 32−aπ ,1, 1212
+b
)whereG(.) denotes the Meijer G-Function, the second equality follows from equation 3.389.2
in Zwillinger (2014), and the last equality follows from 16.19.1 in DLMF (2015). Proposition
6 follows.
Proof of Theorem 1. For the proof of Theorem 1, we will use the following lemma found
in Miller (2006).
Lemma 1. (Watson’s Lemma) Suppose F (s) =∫∞
0e−stf(t) dt, f(t) = tαg(t) where g(t)
has an infinite number of derivatives in the neighborhood of t = 0, with g(0) 6= 0, and
α > −1. Suppose |f(t)| < Kect for any t ∈ (0,∞), where K and c are independent of t.
Then, for s > 0 and s→∞,
F (s) =n∑k=0
g(k)(0)
k!
Γ(α + k + 1)
sα+k+1+O(
1
sα+n+2).
According to equation (14) in the proof of Proposition 6, we denote F (|β|) ≡ πR2-D2(β),
as follows,
F (|β|) =2aπΓ(aπ + b)
Γ(aπ)Γ(b)
∫ ∞0
exp(−|β|x)x2b
(x2 + 2)aπ+bdx =
∫ ∞0
e−|β|xf(x) dx,
where f(t) = C∗t2b/(t2 + 2)aπ+b ≡ t2bg(t), C∗ = 2aπΓ(aπ + b)/{Γ(aπ)Γ(b)}, and g(t) =
C∗(t2 + 2)−aπ−b with g(t) has an infinite number of derivatives in the neighborhood of
t = 0, with g(0) 6= 0. So the marginal density of R2-D2 prior is the Laplace transforms
40

of f(·). By Watson’s Lemma, since |f(t)| < Kect for any t ∈ (0,∞), where K and c are
independent of t, then as |β| → ∞,
F (|β|) =n∑k=0
g(k)(0)
k!
Γ(2b+ k + 1)
|β|2b+k+1+O(
1
|β|2b+n+2),
and setting n = 2 gives
F (|β|) = C∗{
Γ(2b+ 1)
2aπ+b|β|2b+1+ 0
Γ(2b+ 2)
|β|2b+2− aπ + b)Γ(2b+ 3)
2aπ+b|β|2b+3
}+O(
1
|β|2b+4)
= C∗2−aπ−b{
Γ(2b+ 1)
|β|2b+1− (aπ + b)
Γ(2b+ 3)
|β|2b+3
}+O(
1
|β|2b+4) (15)
= O(1
|β|2b+1).
Hence, when b < 1/2, as |β| → ∞, we have
πR2-D2(β)1β2
=C∗
2aπ+b
{Γ(2b+ 1)
|β|2b−1− (aπ + b)
Γ(2b+ 3)
|β|2b+1+O(
1
|β|2b+2)
}→∞.
Proof of Theorem 2. It is obvious based on the marginal density of the generalized
double Pareto prior.
Proof of Theorem 3. According to 10.25.3 in DLMF (2015), when both ν and z are
real, if z → ∞, then Kν(z) ≈ π1/2(2z)−1/2e−z. Then as |β| → ∞, the marginal density of
the Dirichlet-Laplace prior given in Bhattacharya et al. (2015) satisfies
πDL(β) =1
2(1+a∗)/2Γ(a∗)|β|(a∗−1)/2K1−a∗((2|β|)1/2)
≈ 1
2(1+a∗)/2Γ(a∗)|β|(a∗−1)/2π1/22−3/4|β|−1/4 exp{−
√2|β|}
= C0|β|a∗/2−3/4 exp{−
√2|β|} = O(
|β|a∗/2−3/4
exp{√
2|β|}),
where C0 = π1/22−3/4/{2(1+a∗)/2Γ(a∗)} is a constant value. Furthermore, as |β| → ∞,
πDL(β)
1/β2≈ C0|β|a
∗/2+5/4 exp{−√
2|β|} → 0.
41

Proof of Theorem 4. For the proof of Theorem 4, we use the following lemma from
Fields (1972). Some useful notations used in the below proof: Denote aP = (a1, · · · , ap),
as a vector, similarly, bQ = (b1, · · · , bq), cM = (c1, · · · , cm), and so on. Let Γn(cP − t) =∏pk=n+1 Γ(ck−t), with Γn(cP −t) = 1 when n = p, Γ(cM−t) = Γ0(cM−t) =
∏mk=1 Γ(ck−t),
Γ∗(ai − aN) =∏n
k=1;k 6=i Γ(ai − ak), and
pFq
(aPbQ| w)
=∞∑k=0
Γ(aP + k)Γ(bQ)
Γ(bQ + k)Γ(aP )
wk
k!=∞∑k=0
p∏j=1
Γ(aj + k)q∏j=1
Γ(bj)
q∏j=1
Γ(bj + k)p∏j=1
Γ(aj)
wk
k!.
Lemma 2. (Theorem 1 in Fields (1972)) Given (i) 0 ≤ m ≤ q, 0 ≤ n ≤ p; (ii) ai − bkis not a positive integer for j = 1, · · · , p and k = 1, .s, q; (iii) ai − ak is not an integer for
i, k = 1, · · · , p, and i 6= k; and (iv) q < p or q = p and |z| > 1, we have
Gm,np,q
(z∣∣∣a1,··· ,apb1,··· ,bq
)=
n∑i=1
Γ∗(ai − aN)Γ(1 + bM − ai)z−1+ai
Γn(1 + aP − ai)Γm(ai − bQ)q+1Fp
(1,1+bQ−ai1+aP−ai
∣∣∣∣(−1)q−m−n
z
).
Now to prove Theorem 4, we have from Proposition 6 that, the marginal density of the
R2-D2 prior has πR2-D2(βj) = (2π)−1/2{Γ(aπ)Γ(b)}−1Gm,np,q (z|.) with m = 1, n = 3, p =
3, q = 1, a1 = 3/2− aπ, a2 = 1, a3 = 1/2, b1 = 1/2 + b, and z = 2/β2. Conditions (i)-(iv)
in Lemma 2 are satisfied for |β| near 0, since 0 < aπ < 1/2. Denote
C∗0 = (2π)−1/2(Γ(aπ)Γ(b))−1,
C∗1 = C∗0Γ(1
2− aπ)Γ(1− aπ)Γ(aπ)Γ(
1
2+ aπ) > 0,
C∗2 = C∗0Γ(aπ −1
2)Γ(
1
2)Γ(
1
2)Γ(
3
2− aπ) < 0,
C∗3 = C∗0Γ(aπ − 1)Γ(−1
2)Γ(
3
2)Γ(2− aπ) > 0,
U1(β2) =∞∑k=0
(−1)ku1(k, β2), u1(k, β2) =Γ(aπ + b+ k)
Γ(12
+ aπ + k)Γ(aπ + k)
(β2
2)k+aπ−1/2
k!,
U2(β2) =∞∑k=0
(−1)ku2(k, β2), u2(k, β2) =Γ(1
2+ b+ k)
Γ(32− aπ + k)Γ(1
2+ k)
(β2
2)k
k!,
and U3(β2) =∞∑k=0
(−1)ku3(k,β2), u3(k,β2) =Γ(1 + b+ k)
Γ(2− aπ + k)Γ(32
+ k)
(β2
2)k+1/2
k!.
42

Then
πR2-D2(β) = C∗0G1,33,1
(2
β2
∣∣∣ 32−aπ ,1, 1212
+b
)= C∗0
3∑i=1
Γ∗(ai − aN)Γ(1 + bM − ai)Γ3(1 + aP − ai)Γ1(ai − bQ)
(2
β2)−1+ai
2F3
(1,1+bQ−ai1+aP−ai
∣∣∣∣−β2
2
)
= C∗0
3∑i=1
3∏k=1;k 6=i
Γ(ai − ak)Γ(1 + b1 − ai)
3∏k=3+1
Γ(1 + ak − ai)1∏
k=1+1
Γ(ai − bk)(
2
β2)−1+ai
2F3
(1,1+b1−ai1+aP−ai
∣∣∣∣−β2
2
)
= C∗0
3∑i=1
3∏
k=1;k 6=iΓ(ai − ak)Γ(1 + b1 − ai)
1(
2
β2)−1+ai×
∞∑k=0
Γ(1 + k)Γ(1 + b1 − ai + k)3∏j=1
Γ(1 + aj − ai)
3∏j=1
Γ(1 + aj − ai + k)Γ(1)Γ(1 + b1 − ai)
(−β2
2)k
k!
= C∗0 ×{
Γ(1
2− aπ)Γ(1− aπ)
∞∑k=0
Γ(aπ + b+ k)Γ(12
+ aπ)Γ(aπ)
Γ(12
+ aπ + k)Γ(aπ + k)
(−1)k(β2
2)k+aπ−1/2
k!
+Γ(aπ −1
2)Γ(
1
2)Γ(
1
2)∞∑k=0
Γ(12
+ b+ k)Γ(32− aπ)
Γ(32− aπ + k)Γ(1
2+ k)
(−1)k(β2
2)k
k!
+Γ(aπ − 1)Γ(−1
2)Γ(
3
2)∞∑k=0
Γ(1 + b+ k)Γ(2− aπ)
Γ(2− aπ + k)Γ(32
+ k)
(−1)k(β2
2)k+1/2
k!
}
≡ C∗0 ×{
Γ(1
2− aπ)Γ(1− aπ)Γ(aπ)Γ(
1
2+ aπ)U1(β2)+
Γ(aπ −1
2)Γ(
1
2)Γ(
1
2)Γ(
3
2− aπ)U2(β2) + Γ(aπ − 1)Γ(−1
2)Γ(
3
2)Γ(2− aπ)U3(β2)
}≡ C∗1U1(β2) + C∗2U2(β2) + C∗3U3(β2).
For fixed β near the neighborhood of zero, u1(k, β2), u2(k, β2), and u3(k, β2) are all mono-
tone decreasing, and converge to zero as k →∞. Thus, by alternating series test, U1(β2),
U2(β2), and U3(β2) all converge. Also, we have
C0|β|2aπ−1 − C1|β|2aπ+1 = u1(0, β2)− u1(1, β2) ≤ U1(β2) ≤ u1(0, β2) = C0|β|2aπ−1
43
C2 − C3|β|2 = u2(0, β2)− u2(1, β2) ≤ U2(β2) ≤ u2(0, β2) = C2
C4|β| − C5|β|3 = u3(0, β2)− u3(1, β2) ≤ U3(β2) ≤ u3(0, β2) = C4|β|
where C0, C1, C2, C3, and C4 are all positive constants. So given that |β| in the neigh-
borhood of zero and aπ ∈ (0, 12), C∗1(C0|β|2aπ−1−C1|β|2aπ+1)+C∗2C2 +C∗3(C4|β|−C5|β|3) ≤
πR2-D2(β) ≤ C∗1C0|β|2aπ−1 + C∗2(C2 − C3|β|2) + C∗3C4|β|, then πR2-D2(β) = O(|β|2aπ−1).
Proof of Theorem 5. According to 10.30.2 in DLMF (2015), when ν > 0, z → 0 and z
is real, Kν(z) ≈ Γ(ν)(z/2)−ν/2. So given 0 < a∗ < 1 and |β| → 0,
πDL(β) =|β|(a∗−1)/2K1−a∗((2|β|)1/2)
2(1+a∗)/2Γ(a∗)
≈|β|(a∗−1)/2 1
2Γ(1− a∗)( (2|β|)1/2
2)a
∗−1
2(1+a∗)/2Γ(a∗)= C|β|a∗−1,
where C = Γ(1− a∗)/21+a∗Γ(a∗) is a constant value. Theorem 5 follows then.
Proof of Theorem 6. The proof of this theorem depends on Theorem 1 in Armagan,
Dunson, Lee, Bajwa & Strawn (2013). We will restate this theorem in the following Lemma.
Lemma 3. Under Assumptions (A1) and (A2), the posterior of βn under prior πn(βn) is
strongly consistent, that is, for any ε > 0, as n→∞,
Prβ0n
{πn(βn : ||βn − β0
n|| > ε | Yn)→ 0}
= 1
if
πn(βn : ||βn − β0n|| <
∆
nr/2) > exp(−dn)
for all 0 < ∆ < ε2dmin/(48dmax) and 0 < d < ε2dmin/(32σ2) − 3∆dmax/(2σ2) and some
r > 0.
Denote the estimated set of non-zero coefficients as An = {j : βnj 6= 0, j = 1, · · · , pn}.
Given the R2-D2 prior (9), we need to calculate the probability assigned to the region
{β : ||β − β0|| < tn} where tn = ∆/nr/2 with 0 < ∆ < ε2dmin/(48dmax).
44

πn(βn : ||βn − β0n|| < tn) = πn
βn :∑j∈An
(βnj − β0nj)
2 +∑j 6∈An
β2nj < t2n
≥ πn
βj∈Annj :∑j∈An
(βnj − β0nj)
2 <qnt
2n
pn
× πnβj 6∈Annj :
∑j 6∈An
β2nj <
(pn − qn)t2npn
≥
∏j∈An
{πn
(βnj : |βnj − β0
nj | <tn√pn
)}πn(βj 6∈Annj : β2nj <
t2npn
at least for one j
)
=
∏j∈An
{πn
(β0nj −
tn√pn
< βnj < β0nj +
tn√pn
)}[1−{πn
(βj 6∈Annj : β2
nj ≥t2npn
)}pn−qn]
≥
∏j∈An
2tn√pnπR2-D2
(|β0nj |+
tn√pn
)[
1−
{πn
(βj 6∈Annj : |βnj |b ≥
tbn
pb/2n
)}pn−qn]
≥
∏j∈An
2tn√pnπR2-D2
(supj∈An
|β0nj |+
tn√pn
)[
1−
{pb/2n E(|βnj |b)
tbn
}pn−qn]
≥
{2tn√pnπR2-D2
(supj∈An
|β0nj |+
tn√pn
)}qn×
[1−
{pb/2n E(|βnj |b)
tbn
}pn−qn],
where πR2-D2(·) is the marginal density function of βnj, symmetric and decreasing when
the support is positive, and the last but one “≥” is directly got from Markov’s inequality.
Using the hierarchical form of the R2-D2 prior in (10), for any b > 0, conditional
expectations yield
E(|βnj|b) = E[E{E(|βnj|b | λj) | ξ}] = Eξ
[Eλj |ξ
{Γ(b+ 1)
(2/λj)b/2| ξ}]
=bΓ( b
2)Γ(aπ + b
2)
2b/2Γ(aπ).
For the R2-D2 prior, from equation (14), it follows that the marginal density is a
decreasing function on the positive support. Then assumptions (A1) – (A4), together with
the tail approximation of the marginal density as in the proof of Theorem 1, i.e., equation
(15), we have
πR2-D2( supj∈An|β0nj|+
tn√pn
) ≥ πR2-D2(En +tn√pn
) ≥ Γ(aπ + b)
Γ(aπ)Γ(b)2−b
Γ(2b+ 1)
(En + ∆nr/2√pn
)2b+1.
Considering the fact that Γ(a) = a−1 − γ0 + O(a) for a being near zero with γ0 the
45

Euler-Mascheroni constant, we have
πn(βn : ||βn − β0n|| <
∆
nr/2)
≥
2∆
nr/2√pn
Γ(aπ + b)
Γ(aπ)Γ(b)2−b
Γ(2b+ 1)
(En + ∆nr/2√pn
)2b+1
qn 1−
{pb/2n nrb/2bΓ( b2)Γ(aπ + b
2)
∆b2b/2Γ(aπ)
}pn−qn≥
2∆
nr/2√pn
Γ(aπ + b)aπΓ(b)
2−bΓ(2b+ 1)
(En + ∆nr/2√pn
)2b+1
qn 1−
{pb/2n nrb/2bΓ( b2)Γ(aπ + b
2)aπ
∆b2b/2
}pn−qn .Taking the negative logarithm of both sides of the above formula, and letting aπ =
C/(pb/2n nrb/2 log n), we have
− log πn(βn : ||βn − β0n|| <
∆
nr/2)
≤ −qn log
{2∆CΓ(aπ + b)2−bΓ(2b+ 1)
nr/2√pnp
b/2n nrb/2 log nΓ(b)
}+ qn(2b+ 1) log(En +
∆
nr/2√pn
)
−qn log
[1−
{pb/2n nrb/2bΓ( b
2)Γ(aπ + b
2)C
∆b2b/2pb/2n nrb/2 log n
}pn−qn]
= −qn log
{2∆CΓ(aπ + b)2−bΓ(2b+ 1)
Γ(b)
}+ qn(2b+ 1) log(En +
∆
nr/2√pn
)
−qn log
[1−
{bΓ( b
2)Γ(aπ + b
2)C
∆b2b/2 log n
}pn−qn]+ qn log log n
+b+ 1
2qn log pn +
b+ 1
2qnr log n
Since logEn = O(log n), the dominating term is O(qn log n). Hence, if qn = o(n/ log n),
then we have that − log πn(βn : ||βn−β0n|| < ∆/nr/2) < dn for all 0 < d < ε2dmin/(32σ2)−
3∆dmax/(2σ2), so πn(βn : ||βn − β0
n|| < ∆/nr/2) > exp(−dn). The posterior consistency is
then completed by applying Lemma 3.
Proof of Theorem 7. Now that we have established the properties of marginal prior for
the R2-D2 hierarchical formulation, the proof will now be based on the results similar to
Theorems 2.1, 2.2, A.1 and A.2 in Song & Liang (2017). We will restate these theorems in
the following lemma.
46

Lemma 4. Consider the linear regression model (1) and suppose the regularity conditions
(B2)-(B5) hold. Suppose that the prior for π(β, σ2) is of the form
π(β | σ2) =
p∏i=1
[g(βi/σ)/σ], σ2 ∼ IG(a1, b1).
Denote εn = M√qn(log pn)/n where M > 0 is sufficiently large. If the density g(·) in the
above formula satisfies
1−∫ kn
−kng(β) dβ ≤ p−(1+u)
n , − log
(inf
β∈[−En,En]g(β)
)= O(log pn), (16)
where u > 0 is a constant and kn �√qn(log pn)/n/pn, then the following results hold:
Prβ0
{π(βn : ||βn − β0
n|| ≥ c1σ0εn | Yn) ≥ e−c2nε
2n
}≤ e−c3nε
2n ,
Prβ0
{π(βn : ||βn − β0
n||1 ≥ c1σ0√qnεn | Yn) ≥ e−c2nε
2n
}≤ e−c3nε
2n ,
Prβ0
{π(βn : ||Xnβn −Xnβ
0n|| ≥ c1σ
0√nεn | Yn) ≥ e−c2nε
2n
}≤ e−c3nε
2n ,
for some constants c1, c2, c3 > 0.
For the R2-D2 prior in (9), according to (14) the corresponding g(·) function is
g(β) =2aπΓ(aπ + b)
Γ(aπ)Γ(b)
∫ ∞0
exp(−|β|x)x2b
(x2 + 2)aπ+bdx.
By the symmetry of g(β) and Fubini’s Theorem, we have
1−∫ kn
−kng(β) dβ = 2
∫ ∞kn
g(β) dβ
= 22aπΓ(aπ + b)
Γ(aπ)Γ(b)
∫ ∞0
∫ ∞kn
exp(−|β|x) dβx2b
(x2 + 2)aπ+bdx
= 22aπΓ(aπ + b)
Γ(aπ)Γ(b)
∫ ∞0
exp(−knx)
x
x2b
(x2 + 2)aπ+bdx
=2Γ(aπ + b)
Γ(aπ)Γ(b)
∫ ∞0
exp(−kn√
2x)x2b−1
(x2 + 1)aπ+bdx
=2Γ(aπ + b)
Γ(aπ)Γ(b)
1
2√πΓ(aπ + b)
G3,11,3
(k2n
2
∣∣∣1−baπ ,0,
12
)=
1√πΓ(aπ)Γ(b)
G3,11,3
(k2n
2
∣∣∣1−baπ ,0,
12
)47

where the second to last “=” follows from equation 3.389.2 in Zwillinger (2014). The right
side of the above equation looks similar to the marginal density of R2-D2 prior, so we can
apply exactly the same technique used in proof of Theorem 4. So in the proof
1−∫ kn
−kng(β) dβ =
1√πΓ(aπ)Γ(b)
G3,11,3
(k2n
2
∣∣∣1−baπ ,0,
12
)= C∗1U1(k2
n) + C∗2U2(k2n) + C∗3U3(k2
n),
where
C∗1 =1√
πΓ(aπ)Γ(b)Γ(−aπ)Γ(
1
2− aπ)Γ(aπ +
1
2)Γ(1 + aπ) < 0,
C∗2 =1√
πΓ(aπ)Γ(b)Γ(aπ)Γ(
1
2)Γ(
1
2)Γ(1− aπ) > 0,
C∗3 =1√
πΓ(aπ)Γ(b)Γ(aπ −
1
2)Γ(−1
2)Γ(
3
2)Γ(
3
2− aπ) > 0,
U1(k2n) =
∞∑j=0
(−1)ju1(j, k2n), u1(j, k2
n) =Γ(aπ + b+ j)
Γ(1 + aπ + j)Γ(12
+ aπ + j)
(k2n
2)j+aπ
j!,
U2(k2n) =
∞∑j=0
(−1)ju2(j, k2n), u2(j, k2
n) =Γ(b+ j)
Γ(1− aπ + j)Γ(12
+ j)
(k2n
2)j
j!,
and U3(k2n) =
∞∑j=0
(−1)ju3(j, k2n), u3(j, k2
n) =Γ(1
2+ b+ j)
Γ(32− aπ + j)Γ(3
2+ j)
(k2n
2)j+1/2
j!.
Then we have
u1(0, k2n)− u1(1, k2
n) ≤ U1(k2n) ≤ u1(0, k2
n),
U2(k2n) ≤ u2(0, k2
n),
U3(k2n) ≤ u3(0, k2
n).
Hence, based on the fact Γ(1−z) = −zΓ(−z), Γ(z) ≈ 1/z as z → 0, kn �√
(qn log pn)/n/pn →
0, and aπ ≤ log(1−p−(1+u)n )
2 log kn→ 0, it follows
1−∫ kn
kn
g(β) dβ ≤ C∗1
{u1(0, k2
n)− u1(1, k2n)}
+ C∗2u2(0, k2n) + C∗3u3(0, k2
n)
= 1− k2aπn
{−
Γ(−aπ)Γ(12− aπ)Γ(aπ + b)
√πΓ(aπ)Γ(b)2aπ
− C∗4k2n − C∗5k1−2aπ
n
}= 1− k2aπ
n
{Γ(1− aπ)Γ(12− aπ)Γ(aπ + b)
√πΓ(b)2aπ
− C∗4k2n − C∗5k1−2aπ
n
}→ 1− k2aπ
n ≤ p−(1+u)n ,
48
where C∗4 , C∗5 ≥ 0. Hence for aπ ≤ log(1−p−(1+u)
n )2 log kn
→ 0, we proved the first condition in (16)
holds.
Now let’s prove that the second condition in (16) also holds. By Theorem 1, g(β) =
O(|β|−2b−1) as |β| → ∞. Since log(En) = O(log pn),
infβ∈[−En,En]
g(β) = g(En) ≈ O(E−2b−1n ).
So
− log(
infβ∈[−En,En]
g(β))
= (2b+ 1) log(En) = O(log pn),
i.e., the second condition in (16) holds. Hence, all conditions in Lemma 4 are satisfied.
Theorem 7 is proven.
B Appendix: Choosing Hyper-parameters ν and µ
Assume that q of the p variance components (λj) account for (1 − ε) proportion of the
variability. That is,∑qj=1 λ(j)∑pj=1 λ(j)
= 1 − ε, where λ(j) is the j-th largest value. Suppose that
λj ∼ Gamma (ν, µ). The degree of sparsity, i.e. the number of relevant components, q can
then be viewed as finding q such that the proportion achieves 1− ε. Since the proportion
is a random quantity, we seek q such that the median of the distribution of the proportion
reaches equality. Note that since, µ is a scale parameter, the distribution of the proportion
is unaffected by µ. Hence a grid search can be achieved to find ν such that the equation
is satisfied by the median of the distribution, this just requires sampling from a Gamma
(ν, 1) distribution to approximate the distribution for a given ν.
After choosing ν, we then choose the scale parameter, µ, we seek to ensure that the
prior distribution for β is near zero at p−q directions. To do so, recall that the distribution
must lie on the ellipsoid given by βTΣXβ = θσ2. Hence, we wish to push p− q directions
to be inside the ellipsoid, i.e. near zero. So, we set µ such that the probability of βj under
the unrestricted Normal distribution, being inside the ellipsoid is 1 − q/p. Note that this
49

probability is just P (β2j < θσ2). Now
P (β2j < θσ2) = P
(wj <
1
λj
)=
∫ ∞0
∫ 1/nλj
0
fw(wj)fλ(λj)dwjdλj
=
∫ ∞0
1
Γ(1/2)γ
(1
2,
1
2λj
)fλ(λj)dλj
=1
Γ(1/2)Eλ
[γ
(1
2,
1
2λj
)],
where wj is a χ21 random variable, and γ is the lower incomplete gamma function. This
can again be evaluated on a grid. This time a grid of µ.
50





























