Embed Size (px)
Citation preview
IEEE Robotics & Automation Magazine70 1070-9932/10/$26.00ª2010 IEEE DECEMBER 2010
Heterogeneous, MultipleDepot, Multiple UAV
Routing Problem
BY PAUL OBERLIN,SIVAKUMAR RATHINAM,AND SWAROOP DARBHA
Heterogeneous unmanned aerial vehicles (UAVs) are being developed for several civiland military applications. These vehicles can differ either in their motion constraints orsensing/attack capabilities. This article uses methods from operations research toaddress a fundamental routing problem involving heterogeneous UAVs. The ap-proach is to transform the routing problem into a relatively better understood single,
asymmetric, traveling salesman problem (ATSP) and use the algorithms available for the ATSP toaddress the routing problem. To test the effectiveness of the transformation, the well-knownLin-Kernighan-Helsgaun heuristic was applied to the transformed ATSP. Computational resultson the transformed ATSP show that solutions whose costs are within 16% of the optimum canbe obtained relatively fast [within 40 s of central processing unit (CPU)] for the routing probleminvolving ten heterogeneous UAVs and 40 targets.
UAVs are being developed for several civil and military applications for surveillance purposes.In these applications, multiple heterogeneous UAVs with different sensing capabilities can beused to accomplish a given mission. Apart from their differing sensing capabilities, the UAVs canalso have different motion constraints. A commonly encountered mission that is required to becarried out by a team of heterogeneous UAVs is an intelligence, surveillance, and reconnaissancemission where a set of targets needs to be monitored. For example, in the Cooperative Opera-tions in Urban Terrain project [1] at the Air Force Research Laboratory, a collection of UAVs isrequired to gather information/video about a set of potential targets and transmit them to an
Digital Object Identifier 10.1109/MRA.2010.938844
© LUSHPIX

operator, who may request a revisit of the potential targetsfrom a different perspective. The operator specifies the loca-tion of the potential targets through a human–machine inter-face (Vigilant Spirit station) just before the mission begins. Therole of the operator is more of a classifier/sensor and a supervi-sor in the loop, and the task of motion planning is automated.The central computer associated with the Vigilant Spirit sta-tion has about a few minutes to compute the trajectoriesbefore each mission, including specifying the set of targets tobe visited and the order in which they must be visited by eachUAV and provide them with the waypoints. In such applica-tions, the following heterogeneous, multiple depot, multipleUAV routing problem (HMDMURP) naturally arises: Given aset of heterogeneous UAVs that start from distinct depots, a setof targets, find an assignment of targets to be visited by eachUAV along with the sequence in which it should be visited sothat each target is visited at least once by an UAV, all the UAVsreturn to their respective depots after visiting the targets, and thetotal distance traveled by the collection of UAVs is minimized.
HMDMURP is a generalization of the well-known travel-ing salesman problem (TSP), which is known to be NP-hardin the literature [2]. When multiple UAVs are present, there isalso a partitioning problem of assigning a set of targets for eachUAV to visit. The presence of heterogeneity among UAVssignificantly increases the difficulty of this routing problemfurther because the cost of traveling between any two targetsis a function of the UAV and the pair of targets involved.Heterogeneity can also be introduced when some UAVs arerequired to avoid specific targets.
The main objective of this article is to use methods fromoperations research to transform the HMDMURP into astandard single ATSP. ATSP is relatively a well-studied prob-lem in the literature [2]. By doing this transformation, onecan avail of the algorithms for the ATSP to address theHMDMURP. We also present a transformation for a general-ization of the HMDMURP. We consider a generalizationwhere each vehicle has the freedom to choose the angle atwhich it can approach a target. Therefore, in this generaliza-tion of the HMDMURP, the cost of traveling between anytwo targets depends not only on the vehicle and the targetlocations but also on their respective approach angles. To testthis transformation, the well-known Lin-Kernighan-Helsgaun(LKH) heuristic [3], which is one of the best-known heuristicsfor the ATSP, is applied to the transformed problem. Compu-tational results show that solutions whose costs are within 16%of the optimum can be obtained relatively fast (40 s of CPU) forthe HMDMURP involving ten heterogeneous UAVs and 40targets. Given the difficulty of the HMDMURP and thedearth of the results for the same, these results indicate a prom-ising approach to the problem.
Literature Review on theTransformation MethodsThe HMDMURP is a generalization of the multiple TSPs(MTSPs). MTSPs can be classified based on whether all thevehicles start from a single depot or from multiple depots. InBellmore and Hong [4], Hong and Padberg [5], and Rao [6],
the authors consider a single depot MTSP (SDMTSP) whereeach vehicle is available for service at a specific cost and theedge costs need not satisfy triangle inequality. They provide away of transforming this SDMTSP to a standard TSP. Jonkerand Volgenant [7] give an improved transformation for a vari-ant of the symmetric SDMTSP where each vehicle has to visitat least one target. For the single depot, heterogeneous MTSP,Noon and Bean present a transformation in [8] to a singleATSP. In [8], Noon and Bean also mention that their transfor-mation can be extended to the multiple depot case. In [6],Rao gives a transformation for a two-depot TSP. For the vari-ant of the multiple depot TSP where each vehicle need notreturn to its initial depot and must visit at least one target,GuoXing [9] provides a transformation to a single ATSP.
The transformation presented in the “TransformationMethod for the HMDMURP” section uses the Noon–Beantransformation to convert the HMDMURP to a single ATSP.We also extend this transformation to a generalization of theHMDMURP in the “Transformation to a Generalization ofthe HMDMURP” section.
Problem StatementLet there be n targets and m vehicles located at distinct depots. LetV ðTÞ be the set of vertices that correspond to the initial locationsof the vehicles (targets), with the m vertices, fV1, . . . , Vmg ¼ V ,representing the vehicles (i.e., the vertex Vi corresponds to the ithvehicle) and fT1, . . . , Tng ¼ T representing the targets. LetV i ¼ Vi
ST be the set of all the vertices corresponding to the
ith vehicle. Let Ei ¼ V i 3 V i denote the set of all edges (pairs ofvertices) corresponding to the ith vehicle and let Ci : Ei !<þdenote the cost function with Ci(a, b), representing the cost oftraveling from vertex a to vertex b for vehicle i. We consider allthe cost functions to be asymmetric, i.e., Ci(a, b) may not be equalto Ci(b, a) for all a, b 2 V i, i ¼ 1, . . . , m. A vehicle either doesnot visit any target or visits a subset of targets in T . If the ith vehi-cle visits does not visit any target, then its tour, TOURi ¼ ; andits corresponding cost, C(TOURi) ¼ 0. If the ith vehicle visits atleast one target, then its tour may be represented by an orderedset, fVi, Ti1 , . . . , Tiri
, Vig, where Til , l ¼ 1, . . . , ri correspondsto ri distinct targets being visited in that sequence by the ithvehicle. There is a cost, C(TOURi), associated with a tour forthe ith vehicle visiting at least one target and is defined asC(TOURi) ¼ Ci(Vi, Ti1 )þ
P ri�1k¼1Ci(Tik , Tikþ1 )þ Ci(Tiri
, Vi).This article addresses the following HMDMURP: findtours for the vehicles so that each target is visited exactlyonce by some vehicle, and the overall cost defined byP
i2V C(TOURi) is minimized.
Transformation Method for the HMDMURPBefore presenting the details, we first present the basic ideasbehind the transformation in the following discussion.HMDMURP can be transformed to a single ATSP in twosteps. In the first step, we transform it to a one-in-a-set ATSP,and then the resulting one-in-a-set ATSP can be converted toa single ATSP using the Noon–Bean transformation [8]. As itis vital to understand the Noon–Bean transformation, we willexplain the same in the following section.
IEEE Robotics & Automation MagazineDECEMBER 2010 71
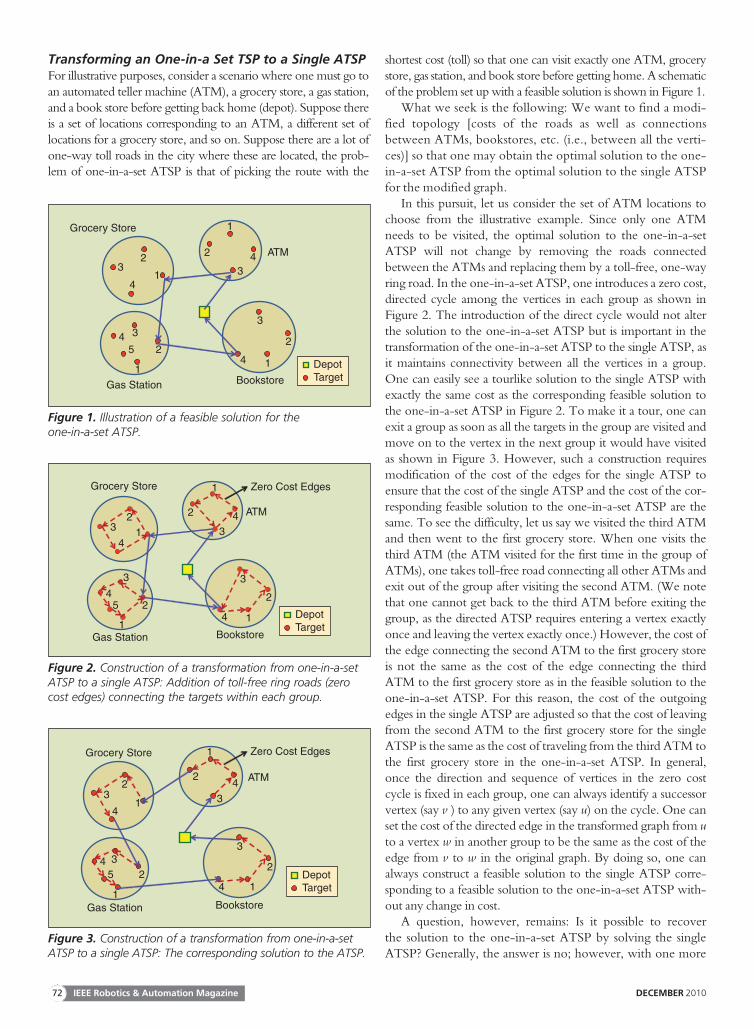
Transforming an One-in-a Set TSP to a Single ATSPFor illustrative purposes, consider a scenario where one must go toan automated teller machine (ATM), a grocery store, a gas station,and a book store before getting back home (depot). Suppose thereis a set of locations corresponding to an ATM, a different set oflocations for a grocery store, and so on. Suppose there are a lot ofone-way toll roads in the city where these are located, the prob-lem of one-in-a-set ATSP is that of picking the route with the
shortest cost (toll) so that one can visit exactly one ATM, grocerystore, gas station, and book store before getting home. A schematicof the problem set up with a feasible solution is shown in Figure 1.
What we seek is the following: We want to find a modi-fied topology [costs of the roads as well as connectionsbetween ATMs, bookstores, etc. (i.e., between all the verti-ces)] so that one may obtain the optimal solution to the one-in-a-set ATSP from the optimal solution to the single ATSPfor the modified graph.
In this pursuit, let us consider the set of ATM locations tochoose from the illustrative example. Since only one ATMneeds to be visited, the optimal solution to the one-in-a-setATSP will not change by removing the roads connectedbetween the ATMs and replacing them by a toll-free, one-wayring road. In the one-in-a-set ATSP, one introduces a zero cost,directed cycle among the vertices in each group as shown inFigure 2. The introduction of the direct cycle would not alterthe solution to the one-in-a-set ATSP but is important in thetransformation of the one-in-a-set ATSP to the single ATSP, asit maintains connectivity between all the vertices in a group.One can easily see a tourlike solution to the single ATSP withexactly the same cost as the corresponding feasible solution tothe one-in-a-set ATSP in Figure 2. To make it a tour, one canexit a group as soon as all the targets in the group are visited andmove on to the vertex in the next group it would have visitedas shown in Figure 3. However, such a construction requiresmodification of the cost of the edges for the single ATSP toensure that the cost of the single ATSP and the cost of the cor-responding feasible solution to the one-in-a-set ATSP are thesame. To see the difficulty, let us say we visited the third ATMand then went to the first grocery store. When one visits thethird ATM (the ATM visited for the first time in the group ofATMs), one takes toll-free road connecting all other ATMs andexit out of the group after visiting the second ATM. (We notethat one cannot get back to the third ATM before exiting thegroup, as the directed ATSP requires entering a vertex exactlyonce and leaving the vertex exactly once.) However, the cost ofthe edge connecting the second ATM to the first grocery storeis not the same as the cost of the edge connecting the thirdATM to the first grocery store as in the feasible solution to theone-in-a-set ATSP. For this reason, the cost of the outgoingedges in the single ATSP are adjusted so that the cost of leavingfrom the second ATM to the first grocery store for the singleATSP is the same as the cost of traveling from the third ATM tothe first grocery store in the one-in-a-set ATSP. In general,once the direction and sequence of vertices in the zero costcycle is fixed in each group, one can always identify a successorvertex (say v ) to any given vertex (say u) on the cycle. One canset the cost of the directed edge in the transformed graph from uto a vertex w in another group to be the same as the cost of theedge from v to w in the original graph. By doing so, one canalways construct a feasible solution to the single ATSP corre-sponding to a feasible solution to the one-in-a-set ATSP with-out any change in cost.
A question, however, remains: Is it possible to recoverthe solution to the one-in-a-set ATSP by solving the singleATSP? Generally, the answer is no; however, with one more
DepotTarget
Grocery Store
Gas Station
ATM
Bookstore
1
23
4
1
2
345
4
4
3
3
2
2
1
1
Figure 1. Illustration of a feasible solution for theone-in-a-set ATSP.
Zero Cost Edges
1
23
4
1
2
3
45
4
4
3
3
2
2
1
1Grocery Store
Gas Station
ATM
Bookstore
DepotTarget
Figure 2. Construction of a transformation from one-in-a-setATSP to a single ATSP: Addition of toll-free ring roads (zerocost edges) connecting the targets within each group.
1
23
4
1
234
54
4
3
3
2
2
1
1Grocery Store
Gas Station
ATM
Bookstore
Zero Cost Edges
DepotTarget
Figure 3. Construction of a transformation from one-in-a-setATSP to a single ATSP: The corresponding solution to the ATSP.
IEEE Robotics & Automation Magazine72 DECEMBER 2010
modification, it is possible to recover the solution. The problemlies in the fact that it may not be cheaper sometimes to visit allthe vertices in a group at once but rather to break from the loop,visit another nearest vertex from another group, and get back tothe loop at some other vertex. If there are n target groups andone depot, there will be more than nþ 1 edges connecting ver-tices from different groups in this case. To disallow such optimalsolutions to the single ATSP and allow us to recover the solu-tion to the one-in-a-set ATSP, we will need the followingobservation: Suppose the cost of the edges connecting the verti-ces from different groups were to be increased by the same posi-tive constant (say M ) for the single ATSP. Then, every feasiblesolution to the single ATSP corresponding to a feasible solutionof one-in-a-set ATSP will cost exactly (nþ 1)M more. If Mwere to be an upper bound for the one-in-a-set ATSP, thenclearly, one cannot have more than ðnþ 1Þ edges in the opti-mal solution to the single ATSP connecting vertices in differentgroups; if it were the case, then the optimal solution will costmore than (nþ 2)M . However, the cost of the feasible singleATSP solution corresponding to the optimal one-in-a-setATSP will be less than (nþ 2)M . Clearly, with this modifica-tion, every optimal solution to the single ATSP will haveexactly nþ 1 edges connecting vertices from different groups.
Suppose one finds an optimal solution to the single ATSP,one can now recover a feasible solution to the one-in-a-setATSP by identifying the sequence of vertices first visited ineach group. The cost of the optimal solution (say C�) to thesingle ATSP is exactly (nþ 1)M more than the cost of the fea-sible solution to the one-in-a-set ATSP. This feasible solutionto the one-in-a-set ATSP must also be optimal; otherwise,one can construct a feasible solution to the single ATSP with acost smaller than C� using the construction we have described.
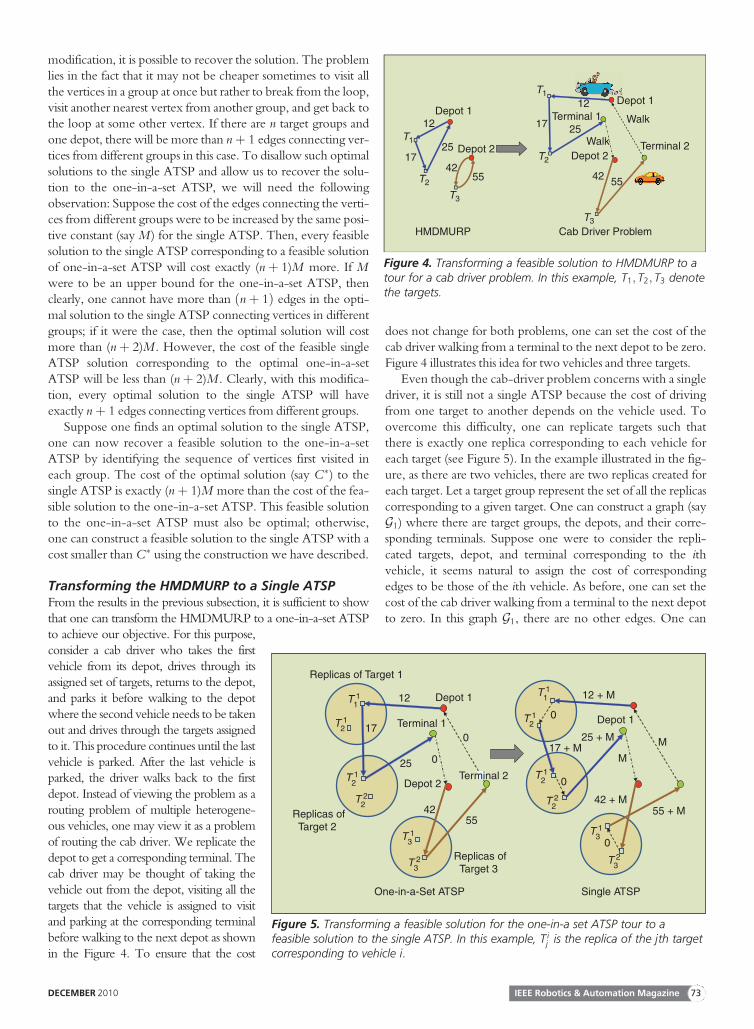
Transforming the HMDMURP to a Single ATSPFrom the results in the previous subsection, it is sufficient to showthat one can transform the HMDMURP to a one-in-a-set ATSPto achieve our objective. For this purpose,consider a cab driver who takes the firstvehicle from its depot, drives through itsassigned set of targets, returns to the depot,and parks it before walking to the depotwhere the second vehicle needs to be takenout and drives through the targets assignedto it. This procedure continues until the lastvehicle is parked. After the last vehicle isparked, the driver walks back to the firstdepot. Instead of viewing the problem as arouting problem of multiple heterogene-ous vehicles, one may view it as a problemof routing the cab driver. We replicate thedepot to get a corresponding terminal. Thecab driver may be thought of taking thevehicle out from the depot, visiting all thetargets that the vehicle is assigned to visitand parking at the corresponding terminalbefore walking to the next depot as shownin the Figure 4. To ensure that the cost
does not change for both problems, one can set the cost of thecab driver walking from a terminal to the next depot to be zero.Figure 4 illustrates this idea for two vehicles and three targets.
Even though the cab-driver problem concerns with a singledriver, it is still not a single ATSP because the cost of drivingfrom one target to another depends on the vehicle used. Toovercome this difficulty, one can replicate targets such thatthere is exactly one replica corresponding to each vehicle foreach target (see Figure 5). In the example illustrated in the fig-ure, as there are two vehicles, there are two replicas created foreach target. Let a target group represent the set of all the replicascorresponding to a given target. One can construct a graph (sayG1) where there are target groups, the depots, and their corre-sponding terminals. Suppose one were to consider the repli-cated targets, depot, and terminal corresponding to the ithvehicle, it seems natural to assign the cost of correspondingedges to be those of the ith vehicle. As before, one can set thecost of the cab driver walking from a terminal to the next depotto zero. In this graph G1, there are no other edges. One can
Depot 1
Depot 2Walk
Walk
Depot 1
T1
T1
T2
T2
T3
T3
HMDMURP Cab Driver Problem
Depot 2
12
1725
4255
12
17 25
42 55
Terminal 1
Terminal 2
Figure 4. Transforming a feasible solution to HMDMURP to atour for a cab driver problem. In this example, T1; T2; T3 denotethe targets.
Depot 1T 11
T 11
T 12
T 12
T 12
T 12
T 22 T 2
2
T 13
T 23
Replicas of Target 1
Replicas ofTarget 2
Replicas ofTarget 3
One-in-a-Set ATSP
Depot 2
Depot 1
Single ATSP
12
17
25
4255
12 + M
17 + M25 + M
42 + M55 + M
0
0
0
M
M
Terminal 1
0
0
T 13
T 23
Terminal 2
Figure 5. Transforming a feasible solution for the one-in-a set ATSP tour to afeasible solution to the single ATSP. In this example, T i
j is the replica of the jth targetcorresponding to vehicle i.
IEEE Robotics & Automation MagazineDECEMBER 2010 73

now pose the cab driver problem as the following one-in-a setATSP on G1: Find an optimal tour on G1 such that exactly onevertex is visited from each of the target groups. A feasible solu-tion to the one-in-a-set ATSP is shown in Figure 5(a).
With the Noon–Bean transformation described in theprevious section, it is therefore possible to convert a feasiblesolution to the HMDMURP in Figure 4 to a feasible solutionto the single ATSP as illustrated in Figure 5.
The basic idea associated with the generalization of theHMDMURP also involves another application of the Noon–
Bean Transformation. Suppose the cost of traveling from anith target to a jth target for the kth UAV also depends on theapproach angles at the ith and jth targets. In this case, one candiscretize the approach angles and associate an ith group ofvertices at the ith target where the UAV must pick exactly onevertex from the group (i.e., one approach angle from thegroup). The remaining part of this section summarizes thesebasic ideas discussed above mathematically.
Let the new set of target vertices replicated for vehicle i bedenoted by Ti
1, . . . , Tin (refer to the problem formulation in
the “Problem Statement” section for notations). Also, let V di
be the replica of the depot vertex (referred to as the terminalvertex) corresponding to vertex Vi. For each k 2 f1, . . . , ng,Ti
k is the replicated-target of Tk for vehicle i. Vehicle i isallowed to only visit replicated-targets in fTi
1, . . . , Ting. The
cost of traveling from target, T ij , to target, Ti
k, for vehicle i isCi(Tj, Tk) for all j, k 2 f1, . . . , ng. If a target, Ti
k, is visited byvehicle i, then it is required that none of the targets in the setfTj
k : j 2 f1, . . . , mg n figg be visited by any of its corre-sponding vehicles.
There are essentially nþ 2 vertices denoted by Vi, V di ,
T i1, . . . , Ti
n corresponding to vehicle i. Since, there are mvehicles, the new transformed graph has m(nþ 2) vertices. Let Mbe an upper bound on the optimal cost of the HMDMURP. Asimple upper bound is 2(nþ m) maxi¼1,..., m maxa, b2Vi[T Ci(a, b).The edges in the new transformed graph and their correspondingcosts are specified as follows:
C (Vi, Tik) ¼ Ci(Vi, Tk)þM , for all
i 2 f1, . . . , mg, k 2 f1, . . . , ng,
C (Vi, V di ) ¼ M , for all i 2 f1, . . . , mg,
C (V di , Viþ1) ¼ 0, for all i 2 f1, . . . , m� 1g,
C (V dm, V1) ¼ 0,
C (T ij , Tiþ1
k ) ¼ Ciþ1(Tj, Tk)þM , for all i 2 f1, . . . , m� 1g,j, k 2 f1, . . . , ng, j 6¼ k,
C (T mj , T 1
k ) ¼ C1(Tj, Tk)þM ,
for all j, k 2 f1, . . . , ng, j 6¼ k,
C (Tij , Tiþ1
j ) ¼ 0, for all i 2 f1, . . . , m� 1g, j 2 f1, . . . , ng,
C (T mj , T 1
j ) ¼ 0, for all j 2 f1, . . . , ng,
C (Tij , V d
iþ1) ¼ Ciþ1(Tj, Viþ1)þM ,
for all i 2 f1, . . . , m� 1g, j 2 f1, . . . , ng,
C (T mj , V d
1 ) ¼ C1(Tj, V1)þM , for all j 2 f1, . . . , ng (1)
An edge does not exist in the transformed graph if it is notassigned a cost in (1).
Transformation to a Generalizationof the HMDMURPIn this section, we show how the transformation givenin the “Transformation Method for the HMDMURP” sec-tion can be also extended to a generalization of theHMDMURP. Let the set of targets, T ¼ fT1, . . . , Tng, beclassified into p disjoint subsets S1, S2, . . . , Sp such thatS
i Si ¼ T and Si \ Sj ¼ ;8i, j ¼ 1, . . . , p, i 6¼ j. Withoutloss of generality, let each subset, Si, have exactly r targets,i.e., n ¼ rp and Si ¼ fTir�rþ1, . . . , Tirg. Consider the fol-lowing generalization of HMDMURP: Find tours for thevehicles so that
u for all i ¼ 1; . . . ; p, exactly one target from subset, Si, isvisited once by some vehicle, and,
u the overall cost defined byP
i2V C(TOURi) is minimized.The motivation to study this generalization comes from a
scenario where multiple approach angles may be availablefor a vehicle to visit a specific target. We use the same nota-tions for the replicated targets, depots, terminals as in the“Transformation Method for the HMDMURP” section.The edges in the new transformed graph for the generaliza-tion of HMDMURP are
u edges joining depots and targets, depots and terminals:
C (Vi, Tik) ¼ Ci(Vi, Tk)þM , for all
i 2 f1, . . . , mg, k 2 f1, . . . , ng,
C (Vi, V di ) ¼ M , for all i 2 f1, . . . , mg,
C (V di , Viþ1) ¼ 0, for all i 2 f1, . . . , m� 1g,
C (V dm, V1) ¼ 0, (2)
u edges joining targets:
C (Tij , Tiþ1
k ) ¼ Ciþ1(Tj, Tk)þM , for all
i 2 f1, . . . , m� 1g, j, k 2 f1, . . . , ng,if Tj 2 Sl then Tk 62 Sl for any l ¼ 1, . . . ,p,
C (T mj ,T 1
k )¼C1(Tjþ1,Tk)þM ,
for all j 2 flr� rþ 1, . . . , lr� 1g,l 2 f1, . . . ,pg,k 2 f1, . . . , ngif Tj 2 Sl then Tk 62 Sl for any l ¼ 1, . . . ,p,
C (Tmj , T 1
k ) ¼ C1(Tj�rþ1, Tk)þM , for all
k 2 f1, . . . , ng, j 2 fr, 2r, 3r, . . . , prg,if Tj 2 Sl then Tk 62 Sl for any l ¼ 1, . . . ,p,
IEEE Robotics & Automation Magazine74 DECEMBER 2010
C (Tij , Tiþ1
j ) ¼ 0, for all i 2 f1, . . . , m� 1g,j 2 f1, . . . , ng,
C (T mj , T 1
jþ1) ¼ 0, for all j 2 flr � r þ 1, . . . , lr � 1g,l 2 f1, . . . , pg,
C (T mjr ,T 1
(j�1)rþ1)¼ 0, for all j¼ 1, . . . ,p, (3)
u edges joining targets and terminals:
C (Tij , V d
iþ1) ¼ Ciþ1(Tj, Viþ1)þM , for all
i 2 f1, . . . , m� 1g, j 2 f1, . . . , ng,
C (Tmj , V d
1 ) ¼ C1(Tjþ1, V1)þM ,
for all j 2 flr � r þ 1, . . . , lr � 1g,l 2 f1, . . . , pg,
C (T mjr , V d
1 )¼ C1(T(j�1)rþ1,V1)þM ,
for all j ¼ 1, . . . ,p: (4)
An edge does not exist in the transformed graph if it is notassigned a cost in the above equations. Using similar argumentsas in the “Transformation Method for the HMDMURP” sec-tion, one can also show that solving an ATSP on the trans-formed graph is equivalent to solving the generalization ofthe HMDMURP.
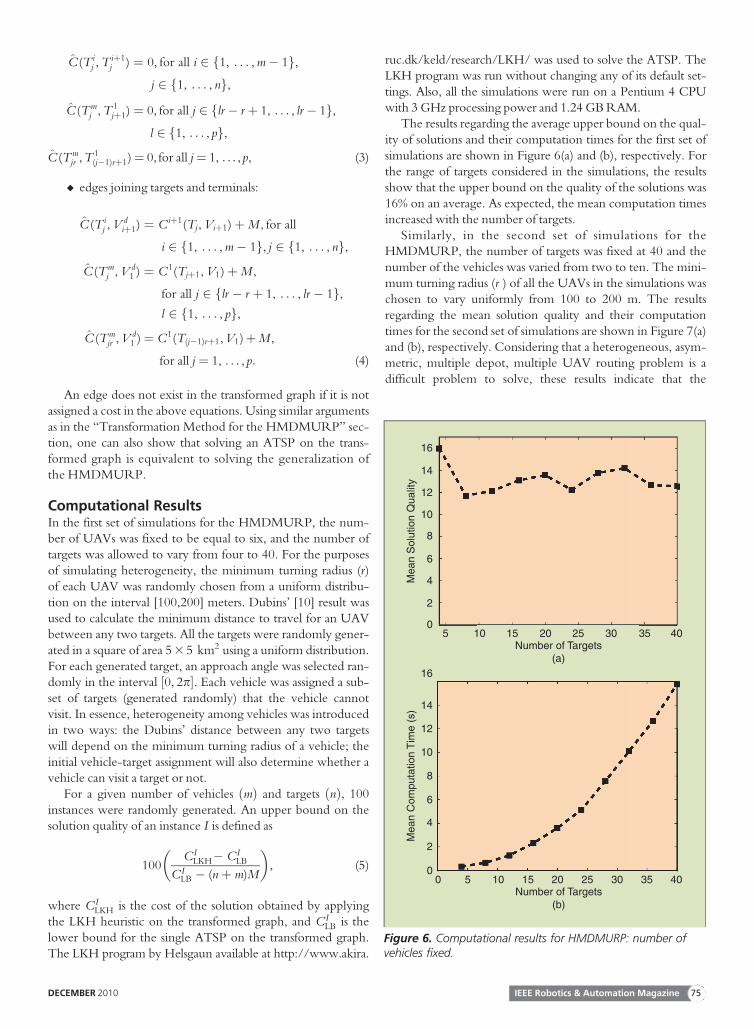
Computational ResultsIn the first set of simulations for the HMDMURP, the num-ber of UAVs was fixed to be equal to six, and the number oftargets was allowed to vary from four to 40. For the purposesof simulating heterogeneity, the minimum turning radius (r)of each UAV was randomly chosen from a uniform distribu-tion on the interval [100,200] meters. Dubins’ [10] result wasused to calculate the minimum distance to travel for an UAVbetween any two targets. All the targets were randomly gener-ated in a square of area 5 3 5 km2 using a uniform distribution.For each generated target, an approach angle was selected ran-domly in the interval ½0, 2p�. Each vehicle was assigned a sub-set of targets (generated randomly) that the vehicle cannotvisit. In essence, heterogeneity among vehicles was introducedin two ways: the Dubins’ distance between any two targetswill depend on the minimum turning radius of a vehicle; theinitial vehicle-target assignment will also determine whether avehicle can visit a target or not.
For a given number of vehicles ðmÞ and targets ðnÞ, 100instances were randomly generated. An upper bound on thesolution quality of an instance I is defined as
100CI
LKH� CILB
CILB � (nþ m)M
� �, (5)
where CILKH is the cost of the solution obtained by applying
the LKH heuristic on the transformed graph, and CILB is the
lower bound for the single ATSP on the transformed graph.The LKH program by Helsgaun available at http://www.akira.
ruc.dk/keld/research/LKH/ was used to solve the ATSP. TheLKH program was run without changing any of its default set-tings. Also, all the simulations were run on a Pentium 4 CPUwith 3 GHz processing power and 1.24 GB RAM.
The results regarding the average upper bound on the qual-ity of solutions and their computation times for the first set ofsimulations are shown in Figure 6(a) and (b), respectively. Forthe range of targets considered in the simulations, the resultsshow that the upper bound on the quality of the solutions was16% on an average. As expected, the mean computation timesincreased with the number of targets.
Similarly, in the second set of simulations for theHMDMURP, the number of targets was fixed at 40 and thenumber of the vehicles was varied from two to ten. The mini-mum turning radius (r ) of all the UAVs in the simulations waschosen to vary uniformly from 100 to 200 m. The resultsregarding the mean solution quality and their computationtimes for the second set of simulations are shown in Figure 7(a)and (b), respectively. Considering that a heterogeneous, asym-metric, multiple depot, multiple UAV routing problem is adifficult problem to solve, these results indicate that the
16
14
12
10
8
6
4
2
05 10 15 20 25 30 35 40
Number of Targets
16
14
12
10
8
6
4
2
050 10 15 20 25 30 35 40
Number of Targets
(a)
(b)
Mea
n S
olut
ion
Qua
lity
Mea
n C
ompu
tatio
n T
ime
(s)
Figure 6. Computational results for HMDMURP: number ofvehicles fixed.
IEEE Robotics & Automation MagazineDECEMBER 2010 75
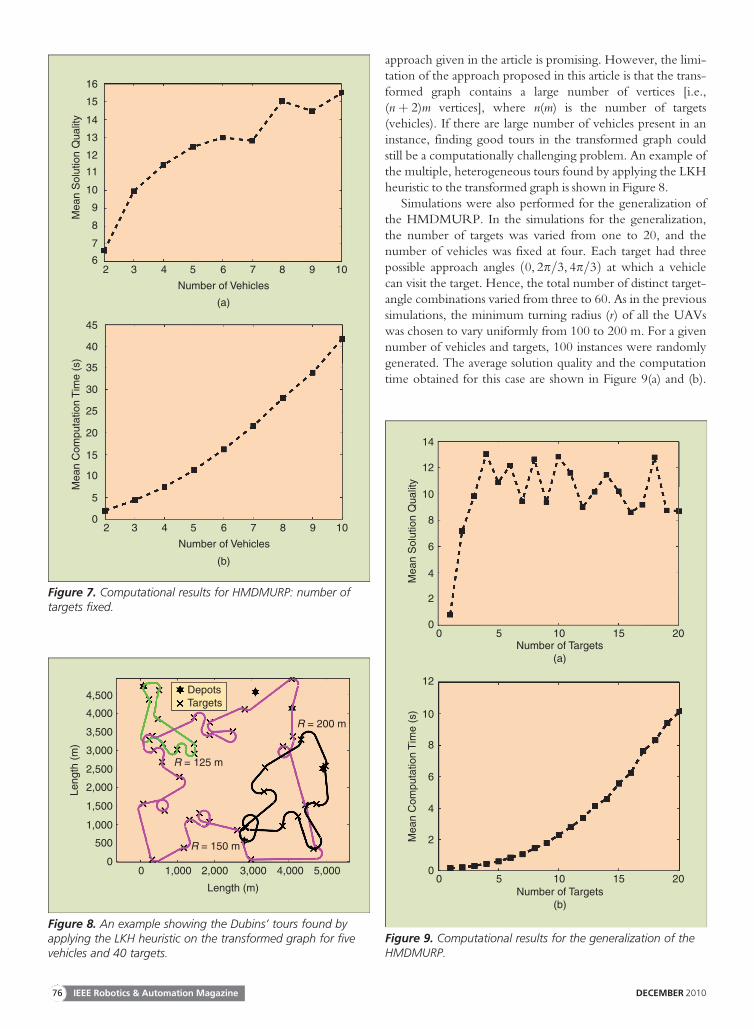
approach given in the article is promising. However, the limi-tation of the approach proposed in this article is that the trans-formed graph contains a large number of vertices [i.e.,(nþ 2)m vertices], where n(m) is the number of targets(vehicles). If there are large number of vehicles present in aninstance, finding good tours in the transformed graph couldstill be a computationally challenging problem. An example ofthe multiple, heterogeneous tours found by applying the LKHheuristic to the transformed graph is shown in Figure 8.
Simulations were also performed for the generalization ofthe HMDMURP. In the simulations for the generalization,the number of targets was varied from one to 20, and thenumber of vehicles was fixed at four. Each target had threepossible approach angles 0, 2p=3, 4p=3ð Þ at which a vehiclecan visit the target. Hence, the total number of distinct target-angle combinations varied from three to 60. As in the previoussimulations, the minimum turning radius (r) of all the UAVswas chosen to vary uniformly from 100 to 200 m. For a givennumber of vehicles and targets, 100 instances were randomlygenerated. The average solution quality and the computationtime obtained for this case are shown in Figure 9(a) and (b).
16
15
14
13
12
11
10
9
8
7
62 3 4 5 6 7 8 9 10
Number of Vehicles
2 3 4 5 6 7 8 9 10
Number of Vehicles
45
40
35
30
25
20
15
10
5
0
(a)
(b)
Mea
n S
olut
ion
Qua
lity
Mea
n C
ompu
tatio
n T
ime
(s)
Figure 7. Computational results for HMDMURP: number oftargets fixed.
4,500
4,000
3,500
3,000
2,500
2,000
1,500
1,000
500
00 1,000 2,000 3,000 4,000 5,000
Length (m)
R = 125 m
R = 150 m
R = 200 m
Leng
th (
m)
DepotsTargets
Figure 8. An example showing the Dubins’ tours found byapplying the LKH heuristic on the transformed graph for fivevehicles and 40 targets.
14
12
10
8
6
4
2
050 10 15 20
50 10 15 20
Number of Targets
12
10
8
6
4
2
0
Number of Targets
(a)
(b)
Mea
n S
olut
ion
Qua
lity
Mea
n C
ompu
tatio
n T
ime
(s)
Figure 9. Computational results for the generalization of theHMDMURP.
IEEE Robotics & Automation Magazine76 DECEMBER 2010
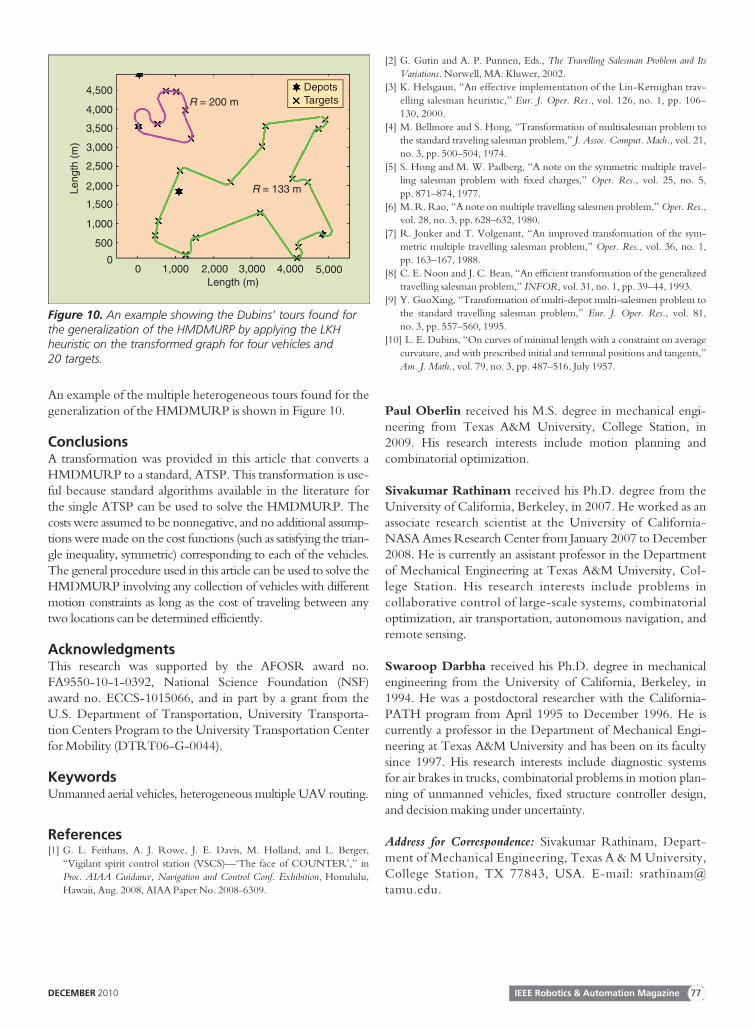
An example of the multiple heterogeneous tours found for thegeneralization of the HMDMURP is shown in Figure 10.
ConclusionsA transformation was provided in this article that converts aHMDMURP to a standard, ATSP. This transformation is use-ful because standard algorithms available in the literature forthe single ATSP can be used to solve the HMDMURP. Thecosts were assumed to be nonnegative, and no additional assump-tions were made on the cost functions (such as satisfying the trian-gle inequality, symmetric) corresponding to each of the vehicles.The general procedure used in this article can be used to solve theHMDMURP involving any collection of vehicles with differentmotion constraints as long as the cost of traveling between anytwo locations can be determined efficiently.
AcknowledgmentsThis research was supported by the AFOSR award no.FA9550-10-1-0392, National Science Foundation (NSF)award no. ECCS-1015066, and in part by a grant from theU.S. Department of Transportation, University Transporta-tion Centers Program to the University Transportation Centerfor Mobility (DTRT06-G-0044).
KeywordsUnmanned aerial vehicles, heterogeneous multiple UAV routing.
References[1] G. L. Feithans, A. J. Rowe, J. E. Davis, M. Holland, and L. Berger,
“Vigilant spirit control station (VSCS)—‘The face of COUNTER’,” inProc. AIAA Guidance, Navigation and Control Conf. Exhibition, Honululu,Hawaii, Aug. 2008, AIAA Paper No. 2008-6309.
[2] G. Gutin and A. P. Punnen, Eds., The Travelling Salesman Problem and ItsVariations. Norwell, MA: Kluwer, 2002.
[3] K. Helsgaun, “An effective implementation of the Lin-Kernighan trav-elling salesman heuristic,” Eur. J. Oper. Res., vol. 126, no. 1, pp. 106–
130, 2000.[4] M. Bellmore and S. Hong, “Transformation of multisalesman problem to
the standard traveling salesman problem,” J. Assoc. Comput. Mach., vol. 21,no. 3, pp. 500–504, 1974.
[5] S. Hong and M. W. Padberg, “A note on the symmetric multiple travel-ling salesman problem with fixed charges,” Oper. Res., vol. 25, no. 5,pp. 871–874, 1977.
[6] M. R. Rao, “A note on multiple travelling salesmen problem,” Oper. Res.,vol. 28, no. 3, pp. 628–632, 1980.
[7] R. Jonker and T. Volgenant, “An improved transformation of the sym-metric multiple travelling salesman problem,” Oper. Res., vol. 36, no. 1,pp. 163–167, 1988.
[8] C. E. Noon and J. C. Bean, “An efficient transformation of the generalizedtravelling salesman problem,” INFOR, vol. 31, no. 1, pp. 39–44, 1993.
[9] Y. GuoXing, “Transformation of multi-depot multi-salesmen problem tothe standard travelling salesman problem,” Eur. J. Oper. Res., vol. 81,no. 3, pp. 557–560, 1995.
[10] L. E. Dubins, “On curves of minimal length with a constraint on averagecurvature, and with prescribed initial and terminal positions and tangents,”Am. J. Math., vol. 79, no. 3, pp. 487–516, July 1957.
Paul Oberlin received his M.S. degree in mechanical engi-neering from Texas A&M University, College Station, in2009. His research interests include motion planning andcombinatorial optimization.
Sivakumar Rathinam received his Ph.D. degree from theUniversity of California, Berkeley, in 2007. He worked as anassociate research scientist at the University of California-NASA Ames Research Center from January 2007 to December2008. He is currently an assistant professor in the Departmentof Mechanical Engineering at Texas A&M University, Col-lege Station. His research interests include problems incollaborative control of large-scale systems, combinatorialoptimization, air transportation, autonomous navigation, andremote sensing.
Swaroop Darbha received his Ph.D. degree in mechanicalengineering from the University of California, Berkeley, in1994. He was a postdoctoral researcher with the California-PATH program from April 1995 to December 1996. He iscurrently a professor in the Department of Mechanical Engi-neering at Texas A&M University and has been on its facultysince 1997. His research interests include diagnostic systemsfor air brakes in trucks, combinatorial problems in motion plan-ning of unmanned vehicles, fixed structure controller design,and decision making under uncertainty.
Address for Correspondence: Sivakumar Rathinam, Depart-ment of Mechanical Engineering, Texas A & M University,College Station, TX 77843, USA. E-mail: [email protected].
4,500
4,000
3,500
3,000
2,500
2,000
1,500
1,000
500
00 1,000 2,000 3,000 4,000 5,000
Length (m)
R = 200 m
R = 133 mLeng
th (
m)
DepotsTargets
Figure 10. An example showing the Dubins’ tours found forthe generalization of the HMDMURP by applying the LKHheuristic on the transformed graph for four vehicles and20 targets.
IEEE Robotics & Automation MagazineDECEMBER 2010 77





























