Embed Size (px)
Citation preview

April 26, 2001 15:5 WSPC/124-JEE 00038
Journal of Earthquake Engineering, Vol. 5, No. 2 (2001) 225–251c© Imperial College Press
YIELDING OSCILLATOR UNDER TRIANGULARGROUND ACCELERATION PULSE
GEORGE MYLONAKIS
Department of Civil Engineering, City University of New York (CUNY),New York, NY 10031, USA
ANDREI M. REINHORN
Department of Civil Engineering, State University of New York at Buffalo,Buffalo, NY 14260, USA
Received 22 April 2000Revised 28 October 2000
Accepted 4 November 2000
An analytical solution is presented for the response of a bilinear inelastic simple oscillatorto a symmetric triangular ground acceleration pulse. This type of motion is typical ofnear-fault recordings generated by source-directivity effects that may generate severedamage. Explicit closed-form expressions are derived for: (i) the inelastic response of theoscillator during the rising and decaying phases of the excitation as well as the ensuingfree oscillations; (ii) the time of structural yielding; (iii) the time of peak response;(iv) the associated ductility demand. It is shown that when the duration of the pulseis long relative to the elastic period of the structure and its amplitude is of the sameorder as the yielding seismic coefficient, serious damage may occur if significant ductilitycannot be supplied. The effect of post-yielding structural stiffness on ductility demand isalso examined. Contrary to presently-used numerical algorithms, the proposed analyticalsolution allows many key response parameters to be evaluated in closed-form expressionsand insight to be gained on the response of inelastic structures to such motions. Themodel is evaluated against numerical results from actual near-field recorded motions.Illustrative examples are also presented.
Keywords: ductility, pulse, shock, spectrum, near field, oscillator, inelastic response.
1. Introduction
Significant interest has emerged in recent years in studying the severe destructive-
ness of strong near-source earthquake motions. According to seismologists, these
motions are the result of superimposed shear waves propagating in the same direc-
tion as the fault rupture, generating a long-duration high-amplitude pulse known
as “fling”. The phenomenon had already been described [Boore and Zoback, 1974;
Bertero et al., 1978; Singh, 1985; Somerville and Graves, 1993] when Northridge
and Kobe earthquakes occurred and the interest in the subject skyrocketed. A num-
ber of structural failures has been attributed to near-field pulses including that of
Olive View Hospital in the 1971 San Fernando Earthquake [Bertero et al., 1978]
and Elevated Hanshin Expressway in Kobe [Park, 1996]. Evidence for the role of a
225

April 26, 2001 15:5 WSPC/124-JEE 00038
226 G. Mylonakis & A. M. Reinhorn
fling on the collapse of a large industrial building in Greece during the 1995 Aegion
earthquake, has been presented by Gazetas et al. [1995]. Examples of near-field
recorded motions from four destructive earthquakes are given in Fig. 1.
Despite an ever-increasing database of near-field recorded accelerograms and the
intense research on the subject [Hall et al., 1995; Iwan, 1997; Malhotra, 1999; Baez
and Miranda, 2000], the inelastic response of structures to such motions has not
been sufficiently explored. It is noted that most of the foregoing studies utilise actual
time histories in conjunction with numerical algorithms to analyse the response of
inelastic single- or multi-degree-of-freedom structures to a single or multiple records
[Bertero et al., 1978; Iwan, 1997; Baez and Miranda, 2000]. In contrast, simple
idealized pulses and analytical techniques that can provide useful insight on the
physics of the problem have received less research attention [Bozognia and Mahin,
1998; Cuesta and Aschheim, 2000].
The scope of this paper is to explore the fundamental mechanics of the problem
by studying analytically the response of a bilinear yielding oscillator to an idealised
ground acceleration pulse. The specific objectives are: (1) outline a simple analyti-
cal procedure for determining the response of the oscillator; (2) determine the times
of yielding, peak response, and the associated ductility demand; (3) examine the
sensitivity of the response to the post-yielding stiffness of the structure; (4) derive
a set of analytical closed-form expressions for the response parameters in (2). It
should be noted that while the elastic perfectly-plastic system has been studied as
TIME : s
0 5 10 15 20
Pyrgos (1993)
GR
OU
ND
A
CC
ELE
RA
TIO
N:
g
-0.8
-0.4
0.0
0.4
0.8
PacoimaDam (1971)
TIME : s
0 5 10 15 20
-0.8
-0.4
0.0
0.4
0.8
Erzican (1992)
Rinaldi (1994)
2 3
0.84 g
3.0 3.5
0.46 g
2 3 4
0.52 g
0.53s
0.15s0.53s
3 4
0.66 g
0.46s
Fig. 1. Four selected near-field ground motions containing long-period, high-acceleration pulses:Pacoima-N164W (1971), Rinaldi-N22W (1994), Erzican-NS (1992), and Pyrgos-EW (1993). Thecorresponding peak ground velocities are, respectivitly, 113, 166, 84, and 25 cm/s (Table 1).

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 227
early as the 1960’s [Biggs, 1964], the response of oscillators with hardening (non-
zero post-yielding stiffness) has not been explored. In addition, little effort has been
put to derive analytical closed form solutions for the inelastic problem. Such ex-
plicit solutions can provide valuable insight on the mechanics of inelastic response
which is often obscured by the complexity of numerical solutions. The results pre-
sented in this paper complement and extend foregoing studies on inelastic shock
spectra by Jacobsen and Ayre [1958] and Biggs [1964]. Because of their simplicity,
the proposed solutions can advance the development of engineering provisions for
structural design against near-field motions.
2. Problem Definition and Solution
The problem studied in this paper is depicted in Fig. 2: a bilinear SDF oscilla-
tor with mass m, elastic stiffness K (leading to an elastic period T = 2π√m/K),
yielding strength Qy, and post-yielding stiffness Kpy = (αK)(0 ≤ α ≤ 1), is sub-
jected to a symmetric triangular ground acceleration pulse. The pulse is described
by its amplitude Ag and duration td. It is noted that this idealised excitation does
not carry all the characteristics of an actual seismic motion. For instance, ground
velocity at the end of the pulse is not zero, which implies that ground displace-
ment increases linearly with time after the end of the excitation. Nevertheless, the
pulse incorporates the large acceleration and velocity excursions observed in actual
near-field recordings and, thereby, is well suited for exploring the salient features
of structural response to such motions. This is especially true since there is ev-
idence, documented in several analytical studies of actual recordings, that only
a short interval of the ground motion, associated with the pulse, contributes to
most of the inelastic seismic demand [Bertero et al., 1978; Cuesta and Aschheim,
..Ug
Ag
td / 2 td t0
um
K, α, Qy
..Ug
K
uy
α x K
u
F
Qy
Fig. 2. System considered.

April 26, 2001 15:5 WSPC/124-JEE 00038
228 G. Mylonakis & A. M. Reinhorn
2000; Bozorgnia and Mahin, 1998]. In addition, it will be shown that a large set
of yielding oscillators attain their maximum response before the end of the exci-
tation and, thereby, the idealised pulse can be used for quantitative predictions of
seismic demand. Given that for impulsive excitations the effect of damping on the
response is minor [Jacobsen and Ayre, 1958; Chopra, 1995], our study concentrates
on undamped oscillators.
2.1. Model development
The variation with time of ground acceleration can be written the form (Fig. 2):
Ug(τ) = 2Ag[b1τ + b2] (1)
in which
τ =t
td(2)
is a dimensionless time variable; b1 and b2 are dimensionless coefficients. In the
rising phase of the pulse (0 ≤ τ ≤ 1/2), b1 = 1, b2 = 0. In the decaying phase
(1/2 < τ1), b1 = −1, b2 = 1. After the end of the excitation (τ > 1), b1 = b2 = 0.
Written in terms of relative displacement, the governing equation of motion of
the system is (Appendix A)
mu(τ) + αKu(τ) = −2mAg(b1τ + b2)−K(1− α)uy (3)
where the term [K(1− α)uy] on the right side applies only for yielding conditions.
Enforcing the initial conditions u(τ0) = u0 and v(τ0) = v0, a general solution to
Eq. (3) is (Appendix A):
D(τ) =
(D0 −
b3
απf
)cos[b4(τ − τ0)]
+1√α
(V0 −
b1
απf
)sin[b4(τ − τ0)] +
2b1α
(τ − τ0) +b3
απf(4)
V (τ) =
(V0 −
b1
απf
)cos[b4(τ − τ0)]
+√α
(D0 −
b3
απf
)sin[b4(τ − τ0)] +
b1
απf(5)
where D(τ) and V (τ) are amplification functions expressing the displacement and
velocity of the oscillator normalised by its elastic response, us, to a static acceler-
ation equal to the peak pulse acceleration Ag [Jacobsen and Ayre, 1958; Chopra,
1995] i.e.,
D(τ) = u(τ)/us (6)
V (τ) = v(τ)/(ωus) (7)
us = mAg/K . (8)

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 229
In the above equations, ω denotes the elastic cyclic natural frequency of the system
and D0, V0 the dimensionless initial conditions; b3, b4 stand for the dimensionless
quantities
b3 = 2πf(b1τ0 + b2)− (1− α)ηπf (9)
b4 =√α2πf (10)
in which f and η are dimensionless parameters describing, respectively, the duration
of the pulse and the yielding resistance of the oscillator:
f =td
T(11)
η =Qy
mAg. (12)
Equations (4) and (5) can be used to describe the response of the system under
both elastic (α = 1) and yielding (α < 1) conditions, in a piece-wise linear fashion.
It is noted that the second term in the right side of Eq. (9), −(1− α)ηπf , should
only be considered if yielding takes place.
3. Elastic Oscillator
To demonstrate the use of Eqs. (4) and (5), the response of an elastic oscillator is
examined first. Detailed discussions on the topic can be found in Jacobsen and Ayre
[1958], Biggs [1964], and Chopra [1995]. The problem is analysed in three phases:
rising pulse (phase 1), decaying pulse (phase 2), and free-vibrations (phase 3). For
each individual phase, the two equations are used in conjunction with the following
values for τ0, b3, D0, V0:
• phase 1 (0 ≤ τ ≤ 1/2) : τ0 = 0, b3 = 0, D0 = 0, V0 = 0
• phase 2 (1/2 < τ ≤ 1) : τ0 = 1/2, b3 = πf,D0 = D1/2, V0 = V1/2
• phase 3 (τ > 1) : τ0 = 1, b3 = 0, D0 = D1, V0 = V1
in which (D1/2, V1/2) and (D1, V1) denote the response of the system at the peak
(τ = 1/2) and the end (τ = 1) of the pulse, respectively. Substituting the above
values in Eqs. (4) and (5), the following expressions are obtained (see also [Jacobsen
and Ayre, 1958])
D(τ) = 2τ − 1
τfsin(2πfτ) (13a)
D(τ) =1
πf
[sinπf cos 2πf
(τ − 1
2
)
− (2− cosπf) sin 2πf
(τ − 1
2
)]− 2τ + 2 (13b)
D(τ) = D1 cos[2πf(τ − 1)] + V1 sin[2πf(τ − 1)] (13c)

April 26, 2001 15:5 WSPC/124-JEE 00038
230 G. Mylonakis & A. M. Reinhorn
which correspond to phases 1, 2 and 3, respectively. It can be easily shown that
Eq. (13a) increases monotonically with time. Accordingly, the response at the peak
of the pulse, D1/2, is the maximum response within the interval 0 < τ < 1/2,
providing a lower bound for the overall peak response.
Differentiating Eqs. (13b) and (13c) one can determine the critical time τm at
which the velocity changes sign and the system reaches its peak response. After
some tedious yet straightforward algebra, the following expressions are obtained:
τm =1
2+
1
2πf
[arctan
(sinπf
2− cosπf
)+ arccos
(1√
5− 4 cosπf
)](14a)
τm =1
2+
1
4f(14b)
which pertain to the decaying acceleration branch and free oscillations, respectively.
Obviously, only dimensionless times smaller than 1 are admissible from Eq. (14a),
and times greater than 1 from Eq. (14b). The maximum response is determined by
substituting the pertinent value of τm into Eq. (13b) or (13c).
In Fig. 3(a), the maximum response of the system, Dm, is plotted as function of
the dimensionless pulse duration f . The response at the peak of the pulse, D1/2, end
of pulse, D1, and free vibrations, Df , are also shown for comparison. The following
are worthy of note: Firstly, the overall peak value, Dm = 1.52, is quite small which
indicates that resonant effects are of minor importance for this type of loading.
Secondly, for small pulse durations (f less than about 0.5) the response at the end
0.0
0.5
1.0
1.5
2.0
PEAK
RESPONSE: Dm
RESPONSE AT
PULSE PEAK: D1/2
AMPLITUDEOF RESIDUAL
RESPONSE: Df
RESPONSE AT
PULSE END: D1
NO
RM
ALI
ZE
D R
ES
PO
NS
E
D =
u /
u s
(a)
Fig. 3. Normalised peak displacement response (a) and corresponding time (b) of an undampedelastic oscillator subjected to a symmetric triangular acceleration pulse. (Graph (b) modified fromBiggs, [1964]).

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 231
DIMENSIONLESS PULSE DURATION f = td / T0
0 1 2 3 4
TIM
E O
F P
EA
K R
ES
PO
NS
E
τ m
= t m
/ t d
0.0
0.5
1.0
1.5
2.0
0.5
RISING PULSE
DECAYING PULSE
FREE VIBRATIONSEqn (14b)
Eqn (14a)
(b)
Fig. 3. (Continued)
of the pulse is very close to the maximum. In contrast, for long pulse durations
(f greater than 1.3), the maximum response can be approximated reasonably well
by the response at the pulse peak. Thirdly, the response amplitude during free
oscillations is not accurate for predicting peak response for f greater than about
0.5. It will be shown that these trends do not hold for inelastic oscillators.
In Fig. 3(b), the time of peak response is plotted as function of f . It is seen that
the maximum response occurs before the end of the pulse (τ = 1) if and only if f
is larger than 0.5. For shorter pulse durations (f < 0.5), peak response takes place
during free vibrations [see Eq. 14(b)].
4. Yielding Oscillator
Fundamental to the analysis of a yielding oscillator is the determination of the time
of yielding τy. To this end, yielding oscillators can be classified in the following
groups:
• Group A: yielding originates during rising pulse (τy < 1/2)
• Group B: yielding originates during decaying pulse (1/2 < τy < 1)
• Group C: yielding originates during free-vibrations (τy > 1)
• Group D: no yielding develops.
A useful relation to be used to this end is that the normalised yielding strength and
yielding displacement of the system are numerically equal (Eqs. 6, 8 and 12) i.e.,
Dy = η . (15)

April 26, 2001 15:5 WSPC/124-JEE 00038
232 G. Mylonakis & A. M. Reinhorn
The above classification can be made based only on the yielding strength of the
system and information from the elastic response. For instance, given that the
response increases monotonically during rising pulse, if η is smaller than D1/2
the system will yield prior to the pulse peak (Group A). In contrast, if η is larger
than Dm the system will remain elastic (Group D). Classifying a system into the
two remaining categories (B and C) involves pulse duration as well. For example,
for long pulse durations (f > 1/2), maximum elastic response occurs before the end
of the pulse (see Fig. 3). Accordingly, if f > 1/2 and D1/2 < η < Dm the system
will yield during decaying pulse (Group B). Classification criteria for all four groups
are summarised in Table 1.
Table 1. Determination of time of yielding for an undamped yielding oscillator.
Group Description System Strength Pulse Duration
Yielding occurs during
A rising pulse η < D1/2 all f ’s
(0 < τy < 1/2)
Yielding occurs during f > 1/2
B decaying pulse D1/2 < η < Dm or
(1/2 < τy < 1) f < 1/2, η < D1
Yielding occurs during
C free oscillations D1 < η < Dm f < 1/2
(1 < τy)
D No yielding develops η > Dm all f ’s
Additional insight on time of yielding is provided in Fig. 4 in which curves from
Fig. 1(a) have been re-plotted. In this figure, vertical axis corresponds to yielding
coefficient η = Qy/(mAg) [instead of displacement D used in Fig. 3]. A yielding
oscillator is represented in the graph by a point with coordinates (f, η). If the
point lies under the curve corresponding to D1/2, the system matches Group A
(i.e. yielding originates during rising pulse). In contrast if (f, η) plots above Dm,
the oscillator will not yield (Group D). Group C exists only for f < 0.5 and is
mapped in the shaded area between Dm and D1. The residual area between Dm
and D1/2 pertains to Group B. The importance of Group A among the various
yielding systems is evident in the graph.
4.1. Determination of time of yielding
To determine the time of yielding τy requires solving the equation
D(τy) = η . (16)

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 233
DIMENSIONLESS PULSE DURATION f = td / T
0 1 2 3
YIE
LDIN
G C
OE
FF
ICIE
NT
η
0.0
0.5
1.0
1.5
Dm
D1/2
D1
4
A
B
C
D
B
(f, η)
Fig. 4. Graphical respresentation of the time of yielding of an inelastic undamped oscillator.Group A: yielding originates during rising pulse; Group B: yielding originates during decayingpulse; Group C: yielding originates during free oscillations; Case D: no yielding develops.
DIMENSIONLESS YIELDING DISPLACEMENT (f η)
0 1 2 3 4
DIM
EN
SIN
OLE
SS
YIE
LDIN
G T
IME
(
f τ y
)
0.0
0.5
1.0
1.5
2.0
fitted curve: Eqn (18)
first branchg (f η)
mirror part1 − g (2 − f η)
static response:(f τy) = 1/2 (f η)
1 + g (f η − 2)
2 − g (2 − f η + 2)
dynamic response: Eqn (17)
Fig. 5. Determination of time of yielding.
For oscillators in Groups A and B, Eq. (16) transcendental and requires numer-
ical treatment (Eqs. 13a and b). For instance, for an oscillator in Group A
(fτy)− 1
2πsin[2π(fτy)] =
1
2(fη) . (17)
Equation (17) is illustrated in Fig. 5 in which (fη) is plotted as a function of
(fτy). It is seen that dimensionless time (fτy) oscillates about the line 1/2(fη)

April 26, 2001 15:5 WSPC/124-JEE 00038
234 G. Mylonakis & A. M. Reinhorn
which corresponds to the static response of the system (obtained by setting the sine
term equal to zero). As evident from the graph, the first branch of the solution,
(fτy) < 1/2, can be well approximated by the function
g = 1/2(fη)0.4 . (18)
Based on the symmetry of the solution, the following explicit expression for τywas developed
fτy = κ+
{g(fη − 2κ) , if (fη)− 2κ < 1
1− g(2− fη + 2κ) , if (fη)− 2κ > 1(19a)
where
κ = Int
(fη
2
)(19b)
is an integer expressing the number of complete oscillation cycles at the time of
yielding. [Int( ) denotes integer part.] The above expression was derived to approx-
imate τy for systems in Group A; yet, it will be shown that it yields acceptable
estimates for systems in the other Groups as well.
From Eq. (19b), it is evident that if (ηf) < 2, κ = 0; the system will yield during
its first oscillation cycle. In such a case, Eq. (19a) simplifies to
τy ∼=1
2η0.4f−0.6 . (20)
Further, in order for the system to yield before the pulse peak (τy < 1/2) requires
η ≤ f3/2 . (21)
4.2. Maximum inelastic response
The response of a yielding oscillator can be analysed in the same way as the elastic
response, i.e. by applying Eqs. (4) and (5) for each response interval in conjunction
with pertinent values for coefficients τ0, D0, V0, and b3. A description of this piece-
wise linear solution is given in Timoshenko et al. [1974]. As an example, for an
oscillator in Group A, the velocity at yielding can be computed from Eq. (5) by
substituting the values τ = τy, D0 = V0 = 0:
Vy =1
πf(1− cos[2πfτy]) . (22)
Equations (4) and (5) can then be used in conjunction with the initial condi-
tions τ0 = τy , D0 = η, V0 = Vy to describe the solution during the remainder
of the increasing branch and obtain the displacement and velocity at the pulse
peak (D1/2, V1/2). The same set of equations with initial conditions τ0 = τy, D0 =
D1/2, V0 = V1/2 is then applied to determine the response during the decaying pulse.
April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 235
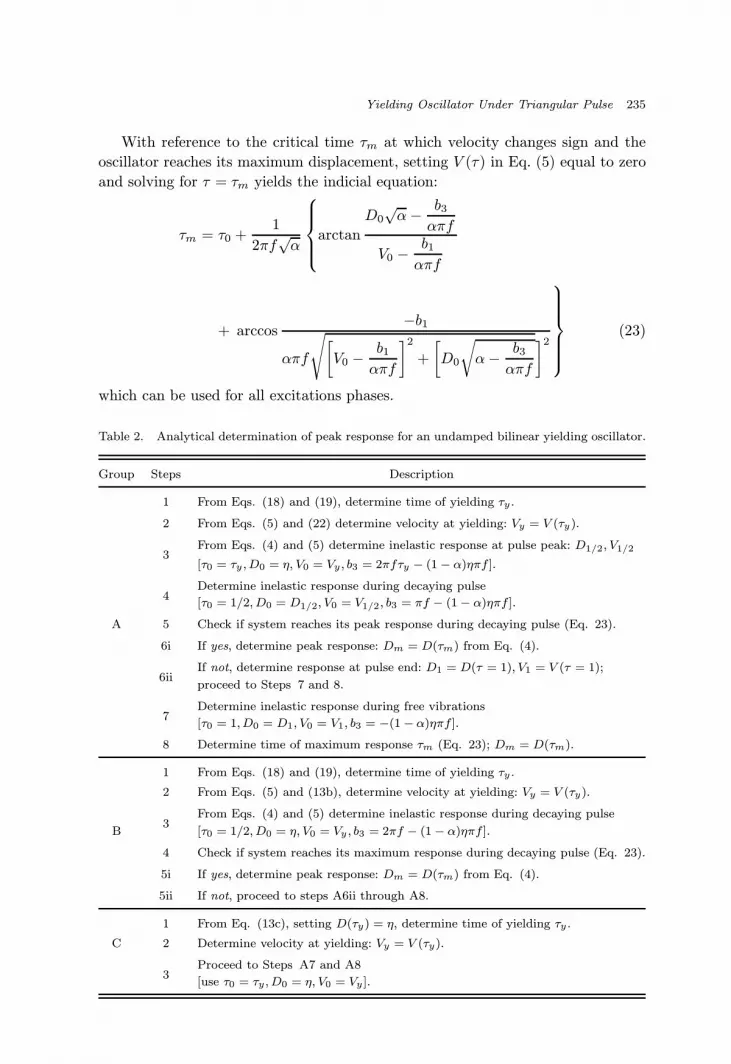
With reference to the critical time τm at which velocity changes sign and the
oscillator reaches its maximum displacement, setting V (τ) in Eq. (5) equal to zero
and solving for τ = τm yields the indicial equation:
τm = τ0 +1
2πf√α
arctan
D0√α− b3
απf
V0 −b1
απf
+ arccos−b1
απf
√[V0 −
b1
απf
]2
+
[D0
√α− b3
απf
]2
(23)
which can be used for all excitations phases.
Table 2. Analytical determination of peak response for an undamped bilinear yielding oscillator.
Group Steps Description
1 From Eqs. (18) and (19), determine time of yielding τy .
2 From Eqs. (5) and (22) determine velocity at yielding: Vy = V (τy).
3From Eqs. (4) and (5) determine inelastic response at pulse peak: D1/2, V1/2
[τ0 = τy ,D0 = η, V0 = Vy , b3 = 2πfτy − (1− α)ηπf ].
4Determine inelastic response during decaying pulse
[τ0 = 1/2, D0 = D1/2, V0 = V1/2, b3 = πf − (1− α)ηπf ].
A 5 Check if system reaches its peak response during decaying pulse (Eq. 23).
6i If yes, determine peak response: Dm = D(τm) from Eq. (4).
6iiIf not, determine response at pulse end: D1 = D(τ = 1), V1 = V (τ = 1);
proceed to Steps 7 and 8.
7Determine inelastic response during free vibrations
[τ0 = 1,D0 = D1, V0 = V1, b3 = −(1− α)ηπf ].
8 Determine time of maximum response τm (Eq. 23); Dm = D(τm).
1 From Eqs. (18) and (19), determine time of yielding τy .
2 From Eqs. (5) and (13b), determine velocity at yielding: Vy = V (τy).
3From Eqs. (4) and (5) determine inelastic response during decaying pulse
B [τ0 = 1/2, D0 = η, V0 = Vy , b3 = 2πf − (1− α)ηπf ].
4 Check if system reaches its maximum response during decaying pulse (Eq. 23).
5i If yes, determine peak response: Dm = D(τm) from Eq. (4).
5ii If not, proceed to steps A6ii through A8.
1 From Eq. (13c), setting D(τy) = η, determine time of yielding τy .
C 2 Determine velocity at yielding: Vy = V (τy).
3Proceed to Steps A7 and A8
[use τ0 = τy, D0 = η, V0 = Vy ].

April 26, 2001 15:5 WSPC/124-JEE 00038
236 G. Mylonakis & A. M. Reinhorn
For instance, returning to oscillators in Group A, Eq. (23) should be used in the
decreasing brancha with τ0 = 1/2, D0 = D1/2, V0 = V1/2 which refer to the initial
conditions at the pulse peak. If τm < 1, the peak displacement will be obtained
from Eq. (4) using the same initial conditions and τ = τm. On the other hand, if
τm > 1, τm should be re-determined from Eq. (23) using τ0 = 1, D0 = D1, V0 = V1.
The corresponding peak displacement would then be obtained from Eq. (4) using
the same initial conditions and τ = τm.
The whole procedure is outlined in Table 2 and can be easily implemented in a
computer spreadsheet. It is noted that the method does not require discretization
of the ground motion (as done in existing numerical solvers), or subdivisions of the
time step to better locate the times of yielding and peak response. It is also noted
that the solution is essentially exact (with the exception of determining τy) and,
thereby, provides highly accurate results.
5. Explicit Solution for Elastic-Perfectly Plastic Oscillators
The equation of dynamic equilibrium of a perfectly plastic oscillator (α = 0) is
u = −Ug −Qy
m. (24)
Integrating the above equation twice with respect to time and enforcing the per-
tinent initial conditions at t = ty, the relative velocity and displacement of the
system are determined as
u = uy + [Ug − Ug(ty)]− Qy
m(t− ty) (25)
v = vy + [Ug − Ug(ty)] + [U − U(ty)](t− ty)− Qy
2m(t− ty)2 . (26)
The time of peak response tm is obtained from Eq. (25) by setting the oscillator
velocity equal to zero
tm = ty +Qy
m[vy + Ug(tm)− Ug(ty)] . (27)
With reference to the problem in question, it is reasonable to assume (see Fig. 3)
that peak displacement occurs after (or slightly before) the end of the pulse. Ac-
cordingly, ground velocity at t = tm can be well approximated by the value at the
end of the pulse i.e.
Ug(tm) ∼= Ug(td) . (28)
Under this assumption and for oscillators in Group A, the dimensionless critical
time τm can be easily determined as
τm ∼= τy −1
η
[τ2y −
1
2− 1
2π2f2(1− cos 2πfτy)
]. (29)
aRecall that peak response occurs always after the pulse peak.

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 237
Substituting Eq. (29) into Eq. (26) and after some lengthy yet straightforward
algebra, an explicit solution is obtained for the imposed ductility demand
µ = 1 +π2f2
η
(2τm − 1− 4
3τ3y
)− 2
η[2π2f2τ2
y + cos 2πfτy − 1](τm − τy)− 2π2f2(τm − τy)2 . (30)
It is noted that the above expression is exact for oscillators attaining their peak
displacement at or after the end of the pulse (τm > 1). However, as will be shown
later on, this equation gives satisfactory predictions for other oscillators attaining
their peak displacement close to the end of the pulse.
6. Results
In Fig. 6, ductility demand µ(= Dm/Dy) is plotted as function of dimensionless
pulse duration f for a set of elastic perfectly-plastic systems (α = 0). Many notewor-
thy features are apparent in the graph: Firstly, µ is in general an increasing function
of f . For instance, with f = 1 (i.e. pulse duration equal to elastic structural period)
and η = 0.5 (i.e. yielding structural acceleration equal to 50% of peak pulse accel-
eration), µ may exceed the astonishing value of 10. The trend is understandably
stronger with low-strength systems. It is noted that the increased response with
increasing f is in contrast to the elastic oscillator in which the maximum response
is obtained near f = 1 (Fig. 3). Secondly, the response is sensitive to the yielding
resistance of the structure. For example, for η = 0.8 and f = 2, a reduction in
DIMENSIONLESS PULSE DURATION f = td / T
0 1 2 3 4
DU
CT
ILIT
Y D
EM
AN
D
µ =
Dm
/ Dy
0.1
1
10
100η = 0.2 0.3
0.5
0.7
0.8
0.9
ELASTIC
Practical capacity limitfor most structures
PROPOSED ANALYTICAL SOLUTIONNUMERICAL SOLUTION (BIGGS 1964)
Fig. 6. Ductility demand for an elastic-perfectly plastic oscillator.

April 26, 2001 15:5 WSPC/124-JEE 00038
238 G. Mylonakis & A. M. Reinhorn
strength by just 15% leads to an increase in ductility demand of the order of 150%.
It is noted, however, that absolute displacements may be less sensitive to η and f .
Justification of the herein proposed solution comes from comparison with results
from the numerical study of Biggs [1964].
Figure 7(a) presents results for time of yielding as function of pulse duration. It
is seen that τy is generally a decreasing function of η which implies that the smaller
the yielding strength the sooner the system will yield. The importance of Group A
TIM
E O
F Y
IELD
ING
τ y
= t
y / t
d
0.0
0.5
1.0
1.5
η = 0.9
0.8
0.5
0.2RISING PULSE
DECAYING PULSE
FREE VIBRATIONS
EXACT NUMERICAL SOLUTIONAPPROXIMATE SOLUTION: EQNS (18, 19)
(a)
DIMENSIONLESS PULSE DURATION f = td / T
0 1 2 3 4
TIM
E O
F P
EA
K R
ES
PO
NS
E
τm
= t
m /
t d
0
1
2
3
η = 0.3
0.2
0.5
0.7
0.8
ELASTIC
NUMERICAL SOLUTION (BIGGS 1964)PROPOSED ANALYTICAL SOLUTION: EQN (23)
(b)
Fig. 7. Dimensionless time of yielding (a) and time of peak response (b) for an undamped elastic-perfectly plastic oscillator.

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 239
among the various systems is evident in the graph. The accuracy of the approximate
solution [Eqs. (18) and (19)] is very good for oscillators in both Groups A and B.
In Fig. 7(b), the critical time τm at which the system reaches its peak response
is presented. For f < 0.5 the peak response occurs after the end of the pulse,
practically regardless of yielding strength. On the other hand, for longer pulse du-
rations two different types of behaviour are observed: relatively “strong” systems
(η > 0.5) attain their maximum response during decaying pulse (τm < 1), while
DU
CT
ILIT
Y D
EM
AN
D
µ =
Dm /
Dy
1
10
10α = 0
0.050.1
0.2
α = 0
0.1
0.2
η = 0.3 0.7
(a)
DIMENSIONLESS PULSE DURATION f = td / T
0 1 2 3 4
TIM
E O
F
PE
AK
RE
SP
ON
SE
τ m
=
t m /
t d
0
1
2
3
α = 0
0.05
0.2
0.2
α = 0
(b)
Fig. 8. Effect of post yielding stiffness on ductility demand (a) and time of peak response (b) foran undamped yielding oscillator.
April 26, 2001 15:5 WSPC/124-JEE 00038
240 G. Mylonakis & A. M. Reinhorn
“weak” systems (η < 0.5) attain their maximum response during free oscillations
(τm > 1). Also, for f > 1 the time of peak response depends solely on η, being prac-
tically independent of pulse duration. The analytical results are in good agreement
with the numerical solution of Biggs [1964].
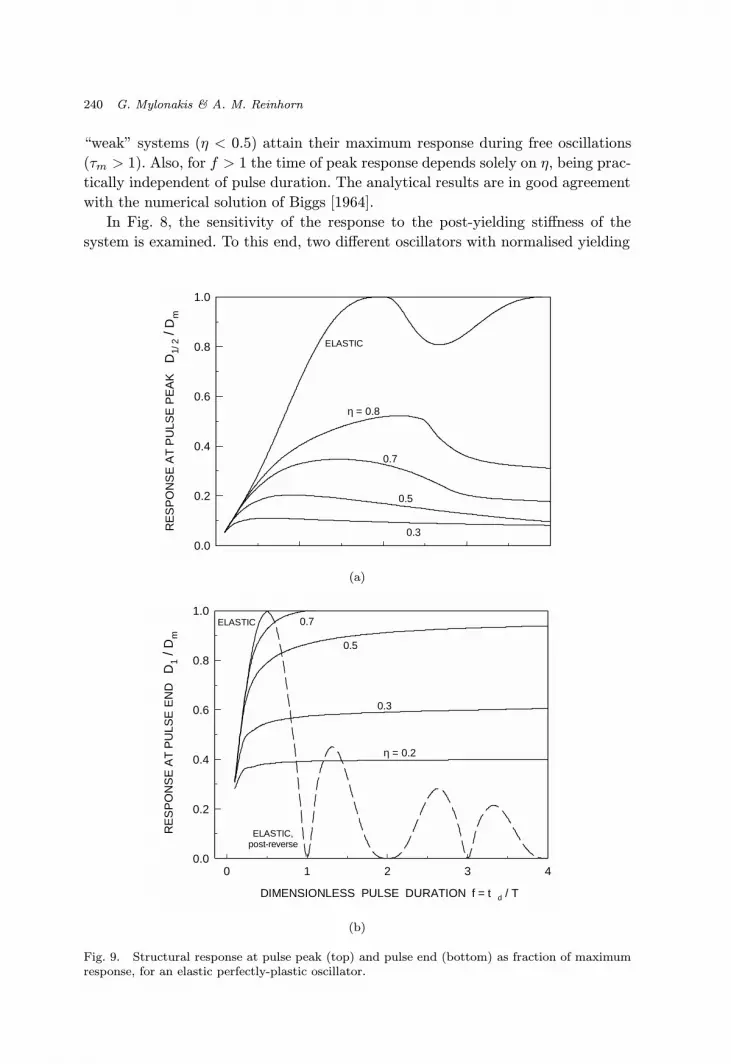
In Fig. 8, the sensitivity of the response to the post-yielding stiffness of the
system is examined. To this end, two different oscillators with normalised yielding
RE
SP
ON
SE
AT
PU
LSE
PE
AK
D
1/ 2 /
Dm
0.0
0.2
0.4
0.6
0.8
1.0
ELASTIC
0.5
0.3
η = 0.8
0.7
(a)
DIMENSIONLESS PULSE DURATION f = t d / T
0 1 2 3 4
RE
SP
ON
SE
AT
PU
LSE
EN
D
D1
/ Dm
0.0
0.2
0.4
0.6
0.8
1.0
η = 0.2
0.7
0.3
0.5
ELASTIC,post-reverse
ELASTIC
(b)
Fig. 9. Structural response at pulse peak (top) and pulse end (bottom) as fraction of maximumresponse, for an elastic perfectly-plastic oscillator.

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 241
strengths η = 0.3 and 0.7 are studied, with α varying between 0 and 20%. It is seen
that with η = 0.7 the effect of post-yielding stiffness on ductility demand is minor.
This is especially true for small pulse durations (f < 1) for which the decrease in
µ due to an increase in α from 0 to 20% is less than about 20%. The beneficial
role of α becomes apparent with low-strength systems (η = 0.3). For example, with
f = 1.5 an increase in α from 0 to 5% reduces ductility demand by a substantial
150%. Increasing α by an additional 15% leads to a total reduction in µ of about
400%.
Additional evidence on the importance of post-yielding stiffness is given in
Fig. 8(b), which presents the time of peak response τm for the same systems ex-
amined in Fig. 8(a). For η = 0.7, τm is not significantly affected by α, which is
in agreement with what observed in Fig. 8(a). On the other hand, for the weak,
η = 0.3, oscillators, τm is strongly influenced (reduced) by α: even for α as small as
0.05, τm is significantly smaller as compared to the corresponding perfectly plastic
system. For long pulse durations (f > 1), peak response may occur before the end
of the pulse.
Figure 9 depicts the normalised displacements D1/2 and D1 as fractions of the
maximum response Dm, for elastic-perfectly-plastic oscillators. Figure 9(a) reveals
that for an inelastic system the response at the peak of the pulseD1/2 is not reliable
for predicting peak response. This is in contrast to the elastic oscillator [Fig. 3(a)]
for which D1/2 is a reliable predictor of Dm beyond about f = 1.5. Indeed, as
evident in Fig. 9, even for η as high as 0.8, the response at pulse peak does not
exceed 60% of maximum. With smaller yielding strengths, the response may be less
than 20% of Dm.
DIMENSIONLESS PULSE DURATION f = td / T
0 1 2 3 4
TIM
E O
F P
EA
K R
ES
PO
NS
E
τ m =
tm /
t d
0
1
2
3
η = 0.3
0.2
0.5
0.7
0.8
APPROXIMATE SOLUTION: EQN 29EXACT SOLUTION: EQN 23 & TABLES I, 2
Fig. 10. Time of peak response for an elastic-perfectly plastic oscillator. Comparison of the exactsolution in Tables 1 and 2 with the approximate solution in Eq. (29).

April 26, 2001 15:5 WSPC/124-JEE 00038
242 G. Mylonakis & A. M. Reinhorn
DIMENSIONLESS PULSE DURATION f = td / T
0 1 2 3 4
DU
CT
ILIT
Y D
EM
AN
D
µ =
Dm
/ Dy
0.1
1
10
100η = 0.2 0.3
0.5
0.7
0.8
EXACT SOLUTION: EQNS 4 & 5 and TABLES I & 2APPROXIMATE SOLUTION: EQN 30
Fig. 11. Ductility demand for an elastic perfectly-plastic oscillator. Comparison of the exactsolution in Table 1 and 2 with the approximate solution in Eq. (30).
In Fig. 9(b), the response at the end of the excitation, D1, is presented as
fraction of Dm. The behaviour is again different from the elastic. For f larger than
about 1, the response at the end of the pulse is practically independent of pulse
duration, depending solely on η. For η equal to 0.5, 0.3, and 0.2, the response is
equal to about 90, 60, and 40% of the peak, respectively.
The predictions of the closed-form solution in Eqs. (29) and (30) are illus-
trated in Figs. 10 and 11, respectively. With reference to the time of peak response
(Fig. 10), it is seen that Eq. (29) is exact for τm higher than 1. On the other
hand, the equation somewhat overestimates the time of peak response for τm less
than 1. Nevertheless, for the range of parameters of the most practical interest (say
η < 0.8, f < 1), the accuracy of the closed-form solution is excellent. Similar trends
are observed for the ductility µ in Fig. 11.
7. Comparison with Actual Near-Field Recordings
To evaluate the applicability of the model to more realistic situations, its predictions
are compared against inelastic spectra from four actual near-field motions. The
accelerograms, which are shown in Fig. 1, were recorded during four destructive
earthquakes around the world. It is noted that the pulses contained in the records
exhibit various degrees of similarity to the symmetric triangular pulse of the model.
For instance, the 0.46g pulse in the Pyrgos [1993] record resembles closely that of
the model. In contrast, the 0.66g pulse in the Pacoima [1971] record does not possess

April
26,
2001
15:5
WSP
C/124-J
EE
00038
Yield
ing
Oscilla
tor
Un
der
Tria
ngu
lar
Pu
lse243
Table 3. Selected near-field motions with long-period, high-acceleration pulses.
Station Name Event/Date Magnitude Distance Direction Peak Pulse PGV Ta Tg t†d
(Ms) from Fault Acceleration (m/s) (s) (s) (s)
(km) (g)
PyrgosPyrgos, Greece
5.2 < 5 EW 0.46 0.25 0.27 0.37 0.193/26/93
ErzicanErzican, Turkey
6.9 2 NS 0.52 0.84 0.30 2.03 1.013/13/92
RinaldiNorthridge
6.7 7.1 N228W 0.84 1.66 0.72 1.06 0.581/17/94
Pacoima DamSan Fernando
6.6 2.8 N164W 0.66 1.13 0.39 1.20 0.602/9/71
†Computed as td = Tg/2 (Eq. 31).

April 26, 2001 15:5 WSPC/124-JEE 00038
244 G. Mylonakis & A. M. Reinhorn
such an obvious similarity. The Erzican [1992] and Rinaldi [1994] motions represent
intermediate cases. Key engineering characteristics of the motions are summarised
in Table 3.
To determine the duration of the pulse in an unambiguous manner, the following
definition was adopted
td ≈Tg
2(31)
where Tg is the period at which the 5%-damped velocity spectrum of the motion be-
comes maximum [Miranda and Bertero, 1994; Cuesta and Aschheim, 2000]. Notice
the good agreement between the predictions based on the above equation (Table 3)
and the pulse durations indicated in Fig. 1.
For simplicity, the amplitude of the pulse in the model was considered equal to
the peak pulse acceleration, PPA, (Table 3) i.e.
Ag ≈ PPA . (32)
In Fig. 12, ductility demands from the Pyrgos [1993] record are presented for three
different oscillator strengths. The agreement between the numerical results and the
predictions of the model is excellent (except perhaps for the case of η = 0.9), which
is expected in view of the similarity in shape of the pulses. The good matching
also confirms some earlier observations [Bertero, 1978; Borzognia and Mahin, 1998;
Cuesta and Aschheim, 2000] that most of the inelastic response caused by such
motions is associated with the pulses.
DIMENSIONLESS PULSE DURATION f = Tg / 2 T
0 1 2 3 4
DU
CT
ILIT
Y
DE
MA
ND
µ
0.1
1
10
100
η = 0.5
0.7
0.9
PYRGOS (1993) EWTRIANGULAR PULSE
Fig. 12. Ductility demand for an elastic-perfectly plastic simple oscillator. Comparison of thepredictions of the model with an actual record.

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 245
DIMENSIONLESS PULSE DURATION f = Tg / 2 T
0 1 2 3 4
DU
CT
ILIT
Y
DE
MA
ND
µ
0.1
1
10
100
η = 0.5
0.7
0.9
ERZICAN (1992) NSTRIANGULAR PULSE
Fig. 13. Ductility demand for an elastic-perfectly plastic simple oscillator. Comparison of thepredictions of the model with an actual record.
DIMENSIONLESS PULSE DURATION f = Tg / 2 T
0 1 2 3 4
DU
CT
ILIT
Y
DE
MA
ND
µ
0.1
1
10
100
η = 0.5
0.7
0.9
PACOIMA (1971) N164WTRIANGULAR PULSE
Fig. 14. Ductility demand for an elastic-perfectly plastic simple oscillator. Comparison of thepredictions of the model with an actual record.

April 26, 2001 15:5 WSPC/124-JEE 00038
246 G. Mylonakis & A. M. Reinhorn
Corresponding results obtained with the Erzican [1992] record are shown in
Fig. 13. The agreement between the model and the earthquake results is again
satisfactory, although not as good as with the previous record. The largest dis-
crepancies are observed with the “weak” η = 0.5 oscillator and can be possibly
attributed to a pre-pulse contained in the record. Nevertheless, studying the details
of the excitation is beyond the scope of this work. Analogous trends (not shown)
are observed with the Rinaldi (1994) record.
The Pacoima (1971) record is examined in Fig. 14. In this case the two solutions
do not compare very well, particularly for dimensionless pulse durations higher
than about 1. This is understood in view of the different shapes of the pulses
in the two motions. Nevertheless, for the frequency range of the most practical
importance (i.e. f < 1), the predictions of the two solutions are quite similar.
Additional discussion is provided in the example below.
8. Case Study: The Collapse of Olive View Hospital in the 1971
San Fernando Earthquake
The Olive View Hospital was a six-storey reinforced concrete building located at
the meizoseismal area of the 1971 San Fernando Earthquake. The structural system
included shear walls that did not extend to the lower two storeys. The discontinuity
in stiffness made the upper four floors act essentially as a rigid box supported on
soft columns. During the earthquake, the columns were displaced horizontally with
respect to their bases by as much as 30 inches [Mahin et al., 1976]. Because of the
extensive damage, the building (which had been completed only few months before
the earthquake) had to be demolished. While no records were obtained at the site,
there are indications that the imposed excitation was similar to that recorded at the
nearby Pacoima Dam [Mahin et al., 1976; Bertero et al., 1978]. The performance of
the building is analysed here using the Pacoima record to demonstrate the destruc-
tiveness of strong pulse-like motions and evaluate the predictions of the model.
Based on earlier investigations [Mahin et al., 1976], the estimated fundamental
natural period and yielding seismic coefficient of the building are, respectively,
T = 0.58s and Cy = 0.35. From Table 3, using the values td = 0.6s, Ag = 0.66g
corresponding to Pacoima record,b the dimensionless pulse duration and oscillator
strength are respectively
f =td
T=
0.60
0.58≈ 1.03 (33)
η =Cy
Ag=
0.35
0.66≈ 0.53 . (34)
Considering the structure as a simple oscillator, it is evident from Fig. 4 that
yielding will occur prior to pulse peak (Group A). The “exact” yielding time is
bNote that the modified Pacoima motion used by Mahin et al. [1976] and Bertero et al. [1978] hasthe same Ag and td.
April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 247
obtained from Eq. (20):
τy =1
2(0.53)0.4(1.03)−0.6 ≈ 0.38 (35)
which is equivalent to (0.38) × (0.6 s) = 0.23 s after the beginning of the pulse.
Further, considering zero post-yield hardening (a reasonable approximation in view
of the inadequate column ductility), the time of peak deformation is computed by
means of Eq. (29):
τm = 0.38− 1
0.53
(0.382 − 1
2− 1− cos[2π × 0.53× 0.38]
2π21.032
)≈ 1.21 (36)
which corresponds to (1.21)× (0.6 s) = 0.73 s after the beginning of the pulse.
The ductility demand on the structure is computed from Eq. (30):
µ = 11 +π21.032
0.53
(2× 1.21− 1− 4
3× 0.383
)− 2
0.53[2π2 × 1.032 × 0.382 + cos(2π × 1.03× 0.38)− 1](1.21− 0.38)
− 2π21.032(1.21− 0.38)2 ≈ 9.3 . (37)
The above value is obviously higher than the ductility capacity of the inade-
quately designed columns. It is worth mentioning that according to traditional
design procedures [Newmark and Hall, 1982], the ductility demand would have
been estimated from the ratio of the elastic spectral acceleration and the yield-
ing acceleration of the structure. From the response spectrum of the motion (not
shown): SA(T = 0.58s) ≈ 0.8g; thus,
µ =0.8g
0.35g≈ 2.3 (38)
which is about 4 times smaller than the value in Eq. (37). Alternatively, with the
more conservative equal energy rule one would have obtained the value (2.32 +
1)/2 = 3.1 which is 3 times smaller than the above estimate. A numerical non-
linear dynamic analysis of the structure modeled as a single- degree-of-freedom
oscillator predicted a ductility demand of about 7 to 8, for periods between 0.5 and
0.6 seconds, which is in agreement with the predictions of the simplified model. As
expected, the effect of damping on the response was found, to be minor.
The maximum imposed deformation is computed from the yielding displacement
of the system
uy =Cy
4π2gT 2 ≈ 0.03 m . (39)
which leads to
umax = µuy = 9.3× 0.03 ≈ 0.28 m . (40)
The above value, although substantially large, is smaller than the observed residual
offset of about 0.50 to 0.75 metres, which is in agreement with findings of earlier
investigations [Mahin et al., 1976; Bertero et al., 1978]. Discussing the reasons for
this discrepancy is beyond the scope of this work.

April 26, 2001 15:5 WSPC/124-JEE 00038
248 G. Mylonakis & A. M. Reinhorn
9. Conclusions
A simple analytical procedure was developed for the determining the response of
a yielding simple oscillator to a symmetric triangular ground acceleration pulse.
The method allows many key response parameters to be evaluated in closed form
expressions and valuable insight to be gained on the mechanics of the problem. The
most important findings gleaned from the study are:
(1) Ductility demand on elastic-perfectly-plastic structures with yielding resistance
smaller than the amplitude of the pulse may attain considerably high values
(i.e. larger that 10). Ductility demand is generally an increasing function of
pulse duration. This is in contrast with elastic systems where the maximum
response is obtained near resonance (f = 1).
(2) Time of yielding can be predicted accurately based on the normalised yielding
strength η and pulse duration f [Eqs. (18) and (19)]. For instance, if (ηf) < 2
the system will yield during its first oscillation cycle. In addition, if η < f3/2,
the system will yield before the peak of the pulse. Quick approximate estimates
of time of yielding can be obtained by means of Eq. (20).
(3) Peak response always takes place after the pulse peak for both elastic and
yielding oscillators. Time of peak response can be determined from Eqs. (23)
(general) and (29) (zero post yielding stiffness).
(4) Structural response is sensitive to post-yielding stiffness. Oscillators with post-
yield hardening of approximately 5% may experience 100% less deformation as
compared to corresponding perfectly plastic systems. This emphasises the need
for providing sufficient post-yielding stiffness (“ductility”) to structures located
in the vicinity of active faults.
(5) A study of the failure of Olive View Hospital in the 1971 San Fernando earth-
quake was presented. Using the Pacoima Dam record it was shown that the
structure could not sustain the imposed ductility demand. While the deforma-
tions predicted by the model were found to be in reasonable agreement with
results from inelastic numerical analyses, the estimated peak displacements
were significantly smaller that the observed offset. This is accord with earlier
investigations of the failure.
Appendix A. Derivation of Eqs. (4) and (5)
Considering linear variation with time of ground acceleration, the equation of
motion of a linearly elastic undamped oscillator is
mu(t) +Ku(t) = −m(a1t+ a2) . (A.1)
Equation (1) has the well-known solution [Chopra, 1995]:

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 249
u(t) =(u0 −
a2
ω2
)cos[ω(t− t0)] +
1
ω
(v0 −
a1
ω2
)sin[ω(t− t0)]
+a1
ω2(t− t0) +
a2
ω2(A.2)
v(t) =(v0 −
a1
ω2
)cos[ω(t− t0)]− ω
(u0 −
a2
ω2
)sin[ω(t− t0)] +
a1
ω2(A.3)
which pertain to the initial conditions u(t0) = u0; v(t0) = v0. In the case of a
bilinear inelastic structure, the restoring force (Ku) on the left side of Eq. (A.1)
should be replaced by:
Ku(t)→ Kuy + αK(u− uy) . (A.4)
Accordingly, during inelastic loading (u > uy; v > 0), the cyclic natural frequency
of the structure is:
ω →√αω . (A.5)
In addition, the constant restoring force [αK(u−uy)] in Eq. (A.4) can be interpreted
as a negative force term:
m(a1t+ a2)→ m(a1t+ a2)− αK(u− uy) . (A.6)
Introducing the substitutions
τ0 =t0
td, b1 =
a1td
2Ag, b2 =
a2
2Ag(A.7,8,9)
and using Eq. (1) and Eqs. (6) to (12), Eqs. (A.2) and (A.3) can be written,
respectively, in the form of Eqs. (4) and (5).
Appendix B. List of Symbols
Ag peak ground acceleration
bi (i = 1, 2, 3, 4) dimensionless response parameter
Cy yielding seismic coefficient
D dimensionless relative displacement
D0 dimensionless “initial” relative displacement (initial condition)
D1/2 dimensionless relative displacement at pulse peak
D1 dimensionless relative displacement at pulse end
Df dimensionless peak relative displacement during free oscillations
Dm dimensionless peak relative displacement envelope
f dimensionless pulse duration (dimensionless oscillator frequency)
g acceleration of gravity
K elastic stiffness
Kpy post-yielding stiffness parameter
κ number of complete oscillation cycles at the time of yielding
m oscillator mass

April 26, 2001 15:5 WSPC/124-JEE 00038
250 G. Mylonakis & A. M. Reinhorn
Qy yielding strength
Ug time history of ground displacement
u relative oscillator displacement
u0 “initial” relative displacement
umax maximum relative displacement
us static relative displacement
uy yielding relative displacement
PPA peak pulse acceleration (ground motion)
T elastic period
Tg period where 5%-damped SV spectrum becomes maximum
t time
td pulse duration
v relative oscillator velocity
v0 “initial” relative velocity
V dimensionless relative velocity
V0 dimensionless “initial” relative velocity
V1/2 dimensionless relative velocity at pulse peak
V1 dimensionless relative velocity at pulse end
α post-yielding stiffness parameter
η dimensionless yielding strength
τ dimensionless time
τy dimensionless yielding time
τm dimensionless time of peak relative displacement
τ0 dimensionless “initial” time (initial condition)
ω cyclic natural frequency
References
Baez, J. I. and Miranda, E. [2000] “Amplification factors to estimate inelastic displace-ment demands for the design of structures in the near field,” paper 1561, 12th WorldConference on Earthquake Engineering, New Zealand.
Bertero V. V., Mahin, S. A. and Herrera, R. A. [1978] “A seismic design implications ofnear-fault San Fernando earthquake records,” Earthq. Engrg. Struct. Dyn. 6, 31–42.
Biggs, J. M. [1964] Introduction to Structural Dynamic, McGraw-Hill.Boore, D. M. and Zoback M. D. [1974] “Near-field motions from kinematic models of
propagating faults,” Bull. Seism. Soc. Am. 64, 321–341.Bozorgnia, Y. and Mahin, S. A. [1998] “Ductility and strength demands of near-fault
ground motions of the Northridge earthquake,” Proceedings of the 6th U.S. NationalConference on Earthquake Engineering, EERI, Seattle.
Chopra, A. K. [1995] Dynamics of Structures, Prentice Hall.Cuesta, I. and Aschheim, M. A. [2000] “Waveform independence ofR-factors,” paper 1546,
12th World Conference on Earthquake Engineering, New Zealand.Gazetas, G. Loukakis, K., Kolias, V. and Stavrakakis, G. [1995] “The 1995 Aegion earth-
quake: analysis of the causes of the collapse of soft-first-story buildings,” Bulletin ofthe National Chamber of Greece 1883, 30–41 (in Greek).

April 26, 2001 15:5 WSPC/124-JEE 00038
Yielding Oscillator Under Triangular Pulse 251
Hall, J. F., Heaton, T. H., Wald, D. J. and Halling, M. W. [1995] “Near-source groundmotion and its effects on flexible buildings,” Earthq. Spectra 11(4), 569–605.
Iwan, W. D. [1997] “Drift spectrum: measure of demand for earthquake ground motions,”J. Struct. Engrg. ASCE 123(4), 397–404.
Jacobsen, L. and Ayre, S. M. [1958] Engineering Vibrations, McGraw-Hill, Inc.Mahin, S. A., Bertero, V. V., Chopra, A. K. and Collins, R. G. [1976] “Response of the
Olive View Hospital Main Building During the San Fernando Earthquake,” ReportNo. EERC 76-22, Earthquake Engineering Research Center, University of California,Berkeley.
Malhotra, P. K. [1999] “Response of buildings to near-field pulse-like ground motions,”Earthq. Engrg. Struct. Dyn. 28(11), 1309–1326.
Mylonakis, G. and Reinhorn, A. M., [1997] “Inelastic seismic response of structuresnear fault: an analytical solution,” Proc., STESSA-97: 2nd International Conferenceon the Behavior of Steel Structures in Seismic Areas, eds. Mazzolani, F. M. andAkiyama, H., pp. 82–89.
Newmark, N. M. and Hall, W. J. [1982] Earthquake Spectra and Design, EERI(monograph).
Naeim, F. [1995] “Implications of the 1994 Northridge earthquake ground motions for theseismic design of tall buildings,” Struct. Design Tall Buildings 3(4), 247–267.
Park, R. [1996] “An analysis of the failure of the 630 m elevated expressway in GreatHanshin earthquake,” Bull. New Zealand Nat. Soc. Earthq. Engrg. 29, 2.
Singh, J. P. [1985] “Earthquake ground motions: implications for designing structures andreconciling structural damage,” Earthq. Spectra 1(2), 239–270.
Somerville, P. and Graves, R. [1993] “Conditions that give rise to unusually large long-period ground motions,” Struct. Design Tall Buildings 2, 211–232.
Timoshenko, S., Young, D. H. and Weaver, W. [1974] Vibration Problems in Engineering,Fourth Edition, John Wiley.





























