Embed Size (px)
Citation preview
Computer Vision January 2004 L1.1© 2004 by Davi Geiger
Image Measurements and Detection
Computer Vision January 2004 L1.2© 2004 by Davi Geiger
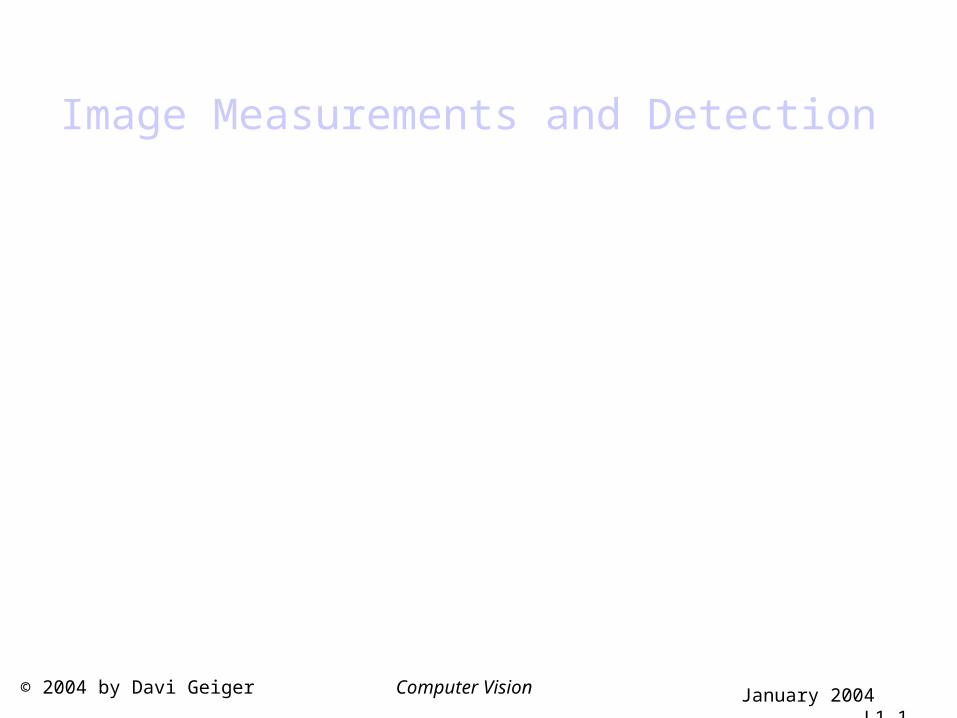
Images are Intensity Surfaces and Edges are Surface Discontinuities
I1(x,y)
I(x,y)
Computer Vision January 2004 L1.3© 2004 by Davi Geiger
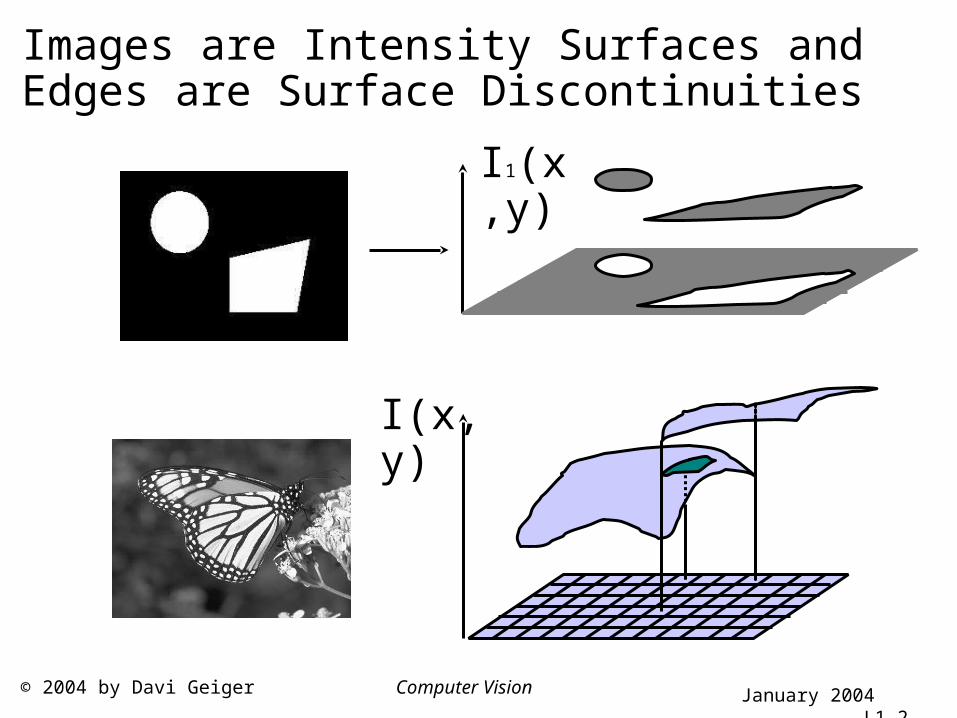
For each pixel (x,y) we evaluate the accumulation of the intensity along sixteen (16) directions, and four (4) different scales, s= 3, 5, 7, 9
s
dIs
syxI0
)sin,cos(1
),,,(~
1
0
)sin,cos(1
),,,(~ s
i
yiyxixIs
syxI
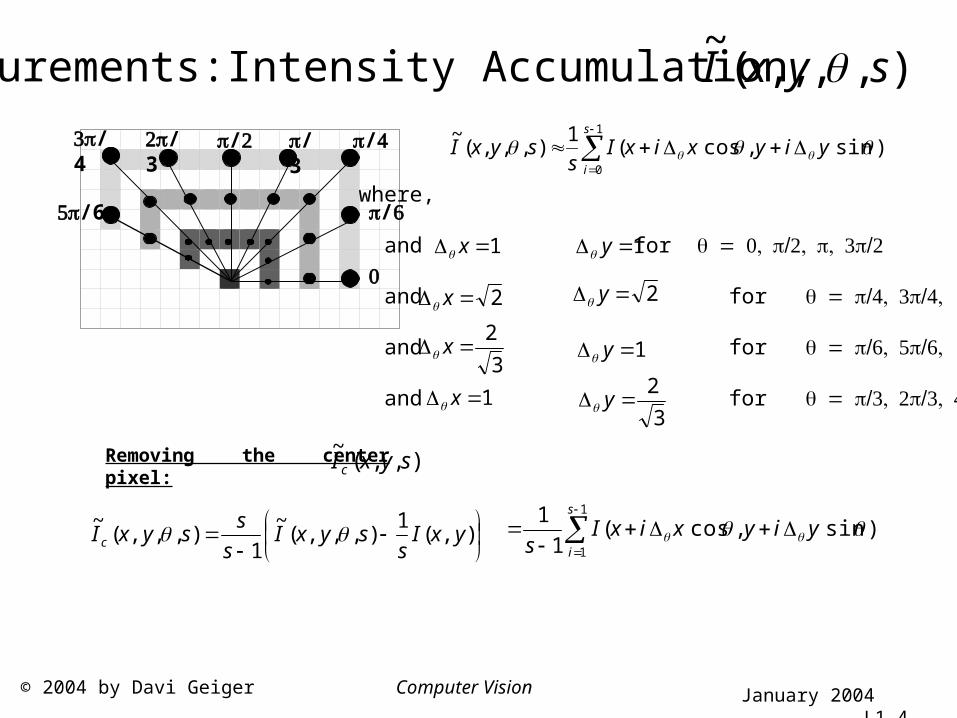
Measurements:Intensity Accumulation, ),,,(~
syxI
//4 /3
/6
/3 /
/
s=3 pixels
s=7 pixels
Discrete approximation
y
x
Computer Vision January 2004 L1.4© 2004 by Davi Geiger
1
0
)sin,cos(1
),,,(~ s
i
yiyxixIs
syxI
1 x
1 y
2 x 2 y
3
2 x 1 y
1 x
3
2 y
Measurements:Intensity Accumulation, ),,,(~
syxI
//4 /3
/6
/3 /
/
where,
and for
and for
and for
and for
),(
1),,,(
~
1),,,(
~yxI
ssyxI
s
ssyxI c
Removing the center pixel: ),,(~
syxI c
1
1
)sin,cos(1
1 s
i
yiyxixIs
Computer Vision January 2004 L1.5© 2004 by Davi Geiger
/4
s=3
s=5
/3
/6
s=5
s=3s=5
s=3
s=5
s=7s=7
s=7
s=7
s=3
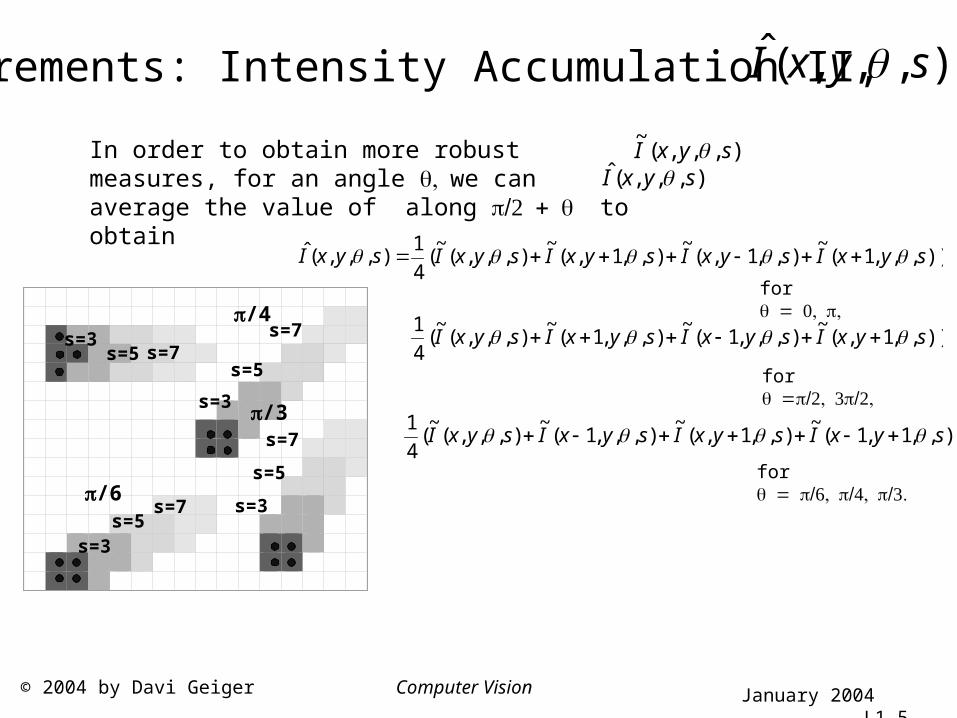
Measurements: Intensity Accumulation II, ),,,(ˆ syxI
)),,,1(~
),,1,(~
),,1,(~
),,,(~
(4
1syxIsyxIsyxIsyxI
)),,1,(~
),,,1(~
),,,1(~
),,,(~
(4
1syxIsyxIsyxIsyxI
)),,1,1(~
),,1,(~
),,,1(~
),,,(~
(4
1syxIsyxIsyxIsyxI
),,,(ˆ syxI for
for
for
In order to obtain more robust measures, for an angle we can average the value of along to obtain
),,,(~
syxI ),,,(ˆ syxI
Computer Vision January 2004 L1.6© 2004 by Davi Geiger
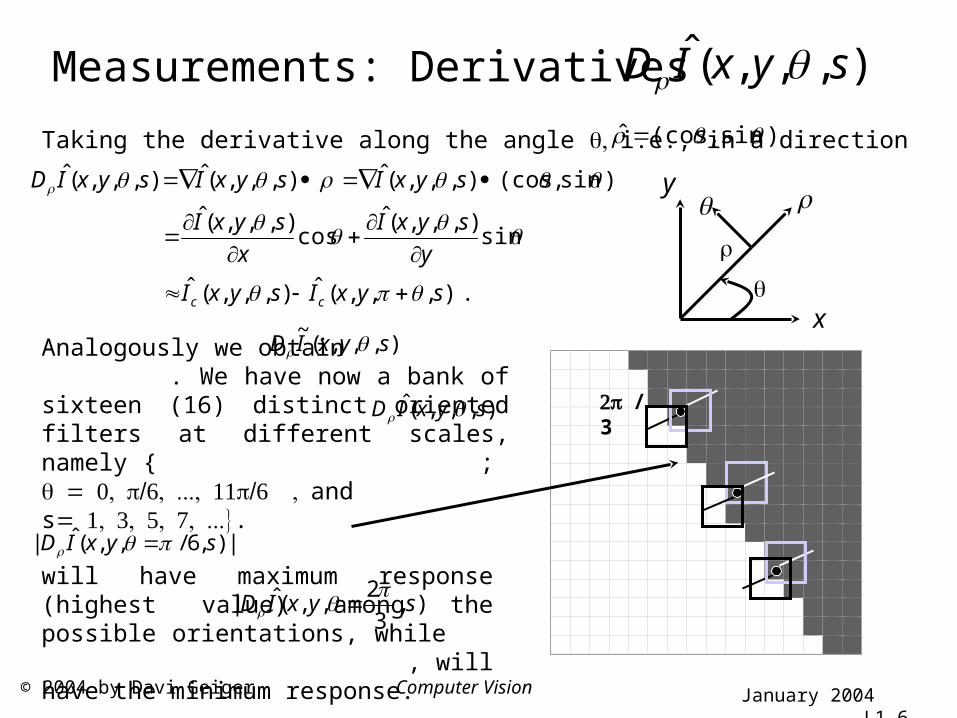
Measurements: Derivatives ),,,(ˆ syxID
.),,,(ˆ),,,(ˆ
sin),,,(ˆ
cos),,,(ˆ
)sin,(cos),,,(ˆ),,,(ˆ),,,(ˆ
syxIsyxI
y
syxI
x
syxI
syxIsyxIsyxID
cc
Taking the derivative along the angle i.e., in a direction )sin,(cosˆ
Analogously we obtain . We have now a bank of sixteen (16) distinct oriented filters at different scales, namely { ; and s.
),,,(~
syxID
will have maximum response (highest value) among the possible orientations, while , will have the minimum response.
|),6/,,(ˆ| syxID
|),3
2,,(ˆ| syxID
/ 3),,,(ˆ syxID
x
y
Computer Vision January 2004 L1.7© 2004 by Davi Geiger
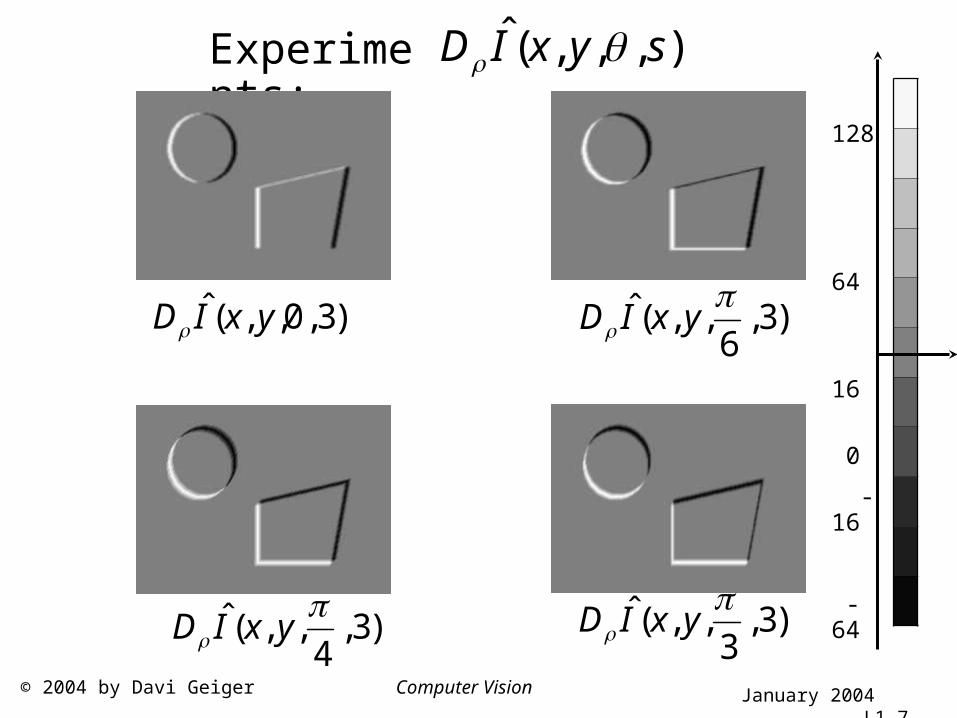
Experiments:
),,,(ˆ syxID
)3,0,,(ˆ yxID )3,6
,,(ˆ
yxID
)3,4
,,(ˆ
yxID )3,3
,,(ˆ
yxID
128
64
16
0
-16
-64
-128
Computer Vision January 2004 L1.8© 2004 by Davi Geiger
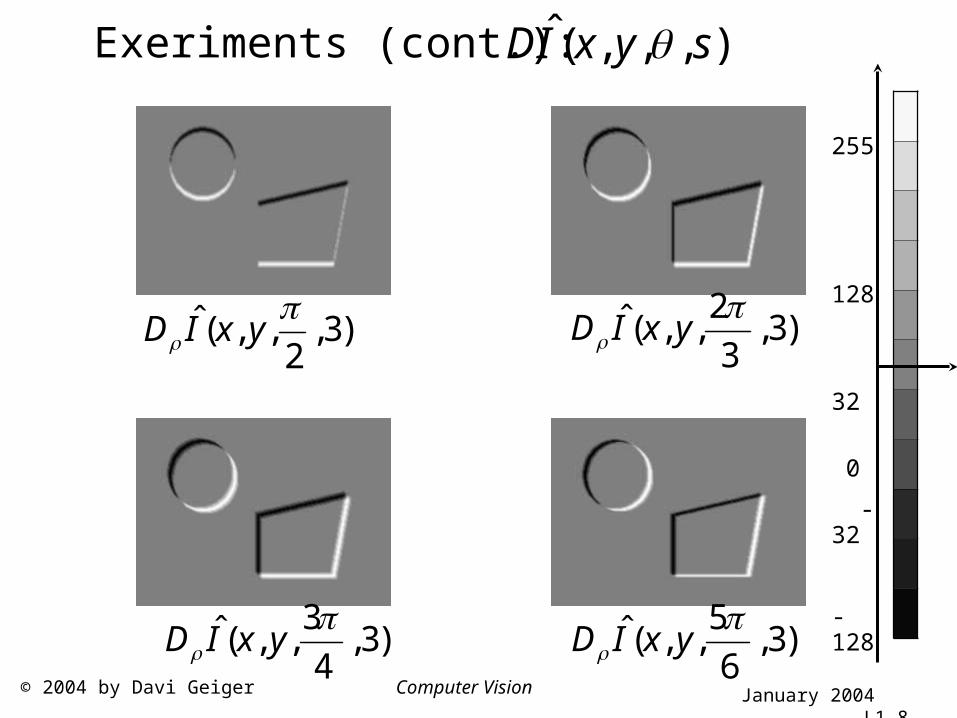
Exeriments (cont.): ),,,(ˆ syxID
)3,2
,,(ˆ
yxID )3,3
2,,(ˆ
yxID
)3,4
3,,(ˆ
yxID )3,6
5,,(ˆ
yxID
255
128
32
0
-32
-128
-255
Computer Vision January 2004 L1.9© 2004 by Davi Geiger
/3
/6
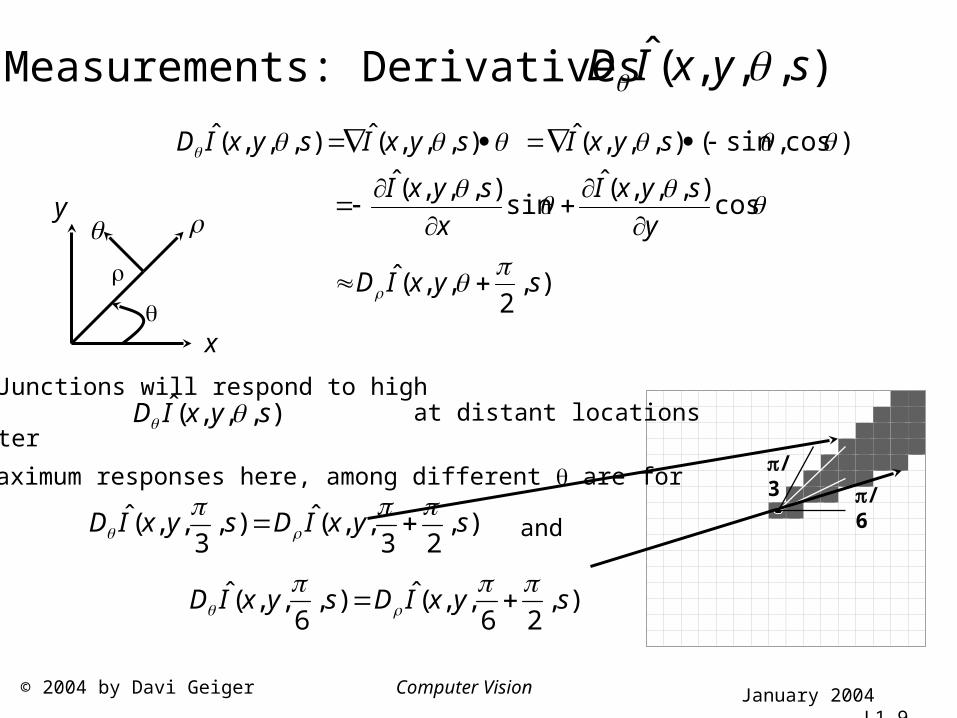
Measurements: Derivatives ),,,(ˆ syxID
),2
,,(ˆ
cos),,,(ˆ
sin),,,(ˆ
)cos,sin(),,,(ˆ),,,(ˆ),,,(ˆ
syxID
y
syxI
x
syxI
syxIsyxIsyxID
Corners and Junctions will respond to high values of at distant locationsfrom the center
),,,(ˆ syxID
),23
,,(ˆ),3
,,(ˆ syxIDsyxID
),26
,,(ˆ),6
,,(ˆ syxIDsyxID
The maximum responses here, among different are for
and
x
y
Computer Vision January 2004 L1.10© 2004 by Davi Geiger
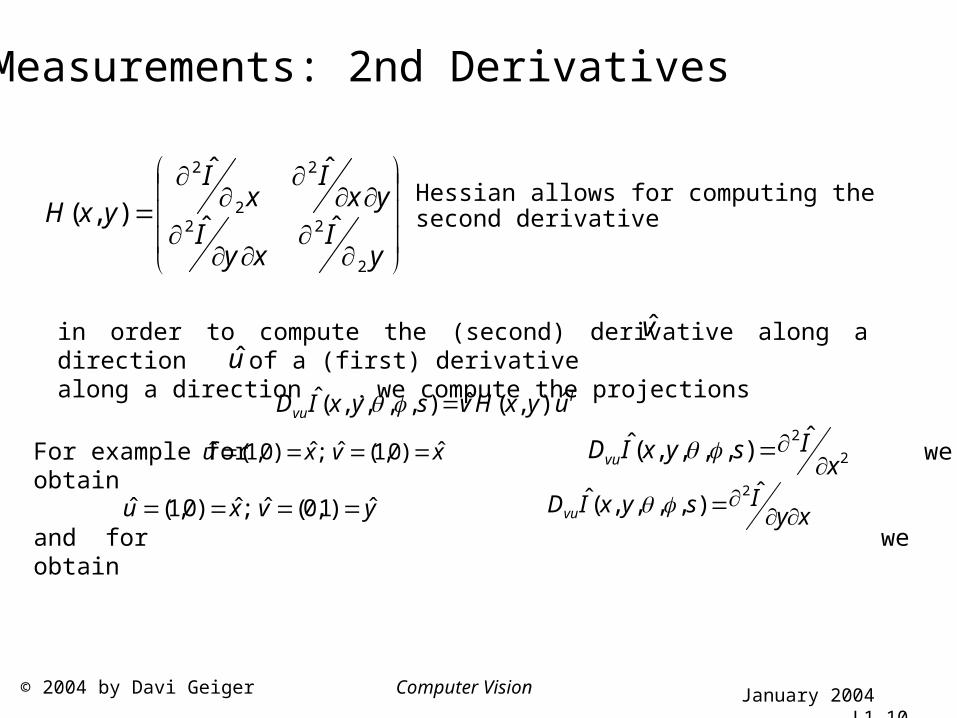
Measurements: 2nd Derivatives
yI
xyI
yxI
xI
yxH
2
22
2
2
2
ˆˆ
ˆˆ
),(Hessian allows for computing the second derivative
Tvu uyxHvsyxID ˆ),(ˆ),,,,(ˆ
in order to compute the (second) derivative along a direction of a (first) derivative along a direction we compute the projections
uv
For example for we obtain
and for we obtain
xvxu ˆ)0,1(ˆ;ˆ)0,1(ˆ 2
2 ˆ),,,,(ˆx
IsyxIDvu
yvxu ˆ)1,0(ˆ;ˆ)0,1(ˆ xyIsyxIDvu
ˆ),,,,(ˆ2
Computer Vision January 2004 L1.11© 2004 by Davi Geiger
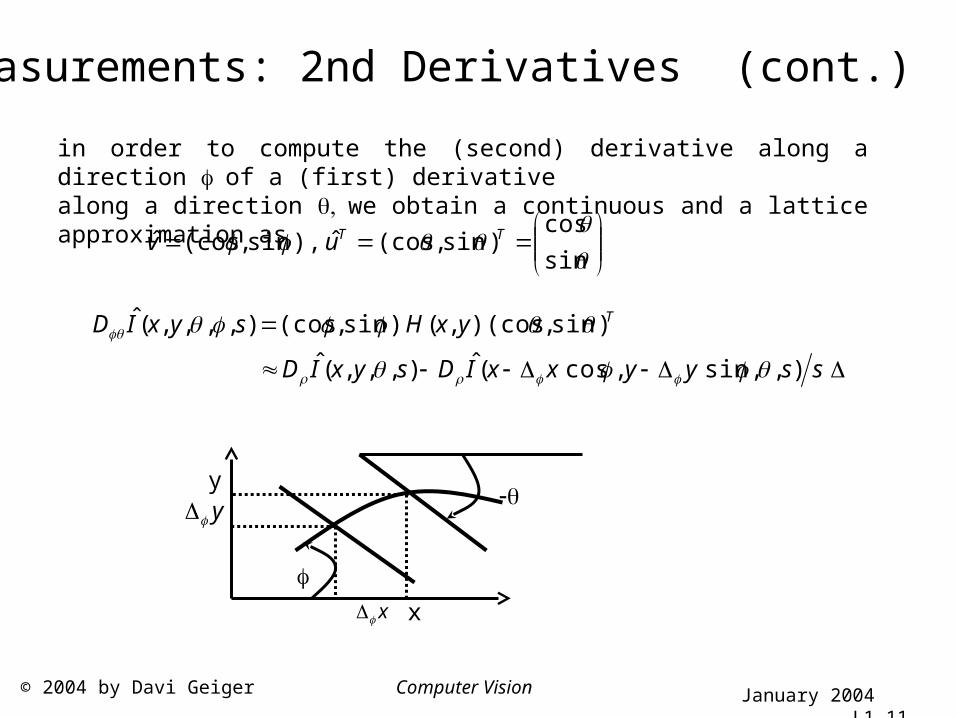
Measurements: 2nd Derivatives (cont.)
ssyyxxIDsyxID
yxHsyxID T
),,sin,cos(ˆ),,,(ˆ
)sin,(cos),()sin,(cos),,,,(ˆ
in order to compute the (second) derivative along a direction of a (first) derivative along a direction we obtain a continuous and a lattice approximation as
x
y
sin
cos)sin,(cosˆ,)sin,(cosˆ TTuv
x
y
Computer Vision January 2004 L1.12© 2004 by Davi Geiger
Image Features –Decisions!
Features such as edges, corners, junction, eyes, … are obtained by making some decision from the image measurements.
Decisions are the result of some comparison followed by a choice. Examples (i) if a measurement is above a threshold we accept, not otherwise; (ii) if a measurement is the largest compared to others, we select it.
Computer Vision January 2004 L1.13© 2004 by Davi Geiger
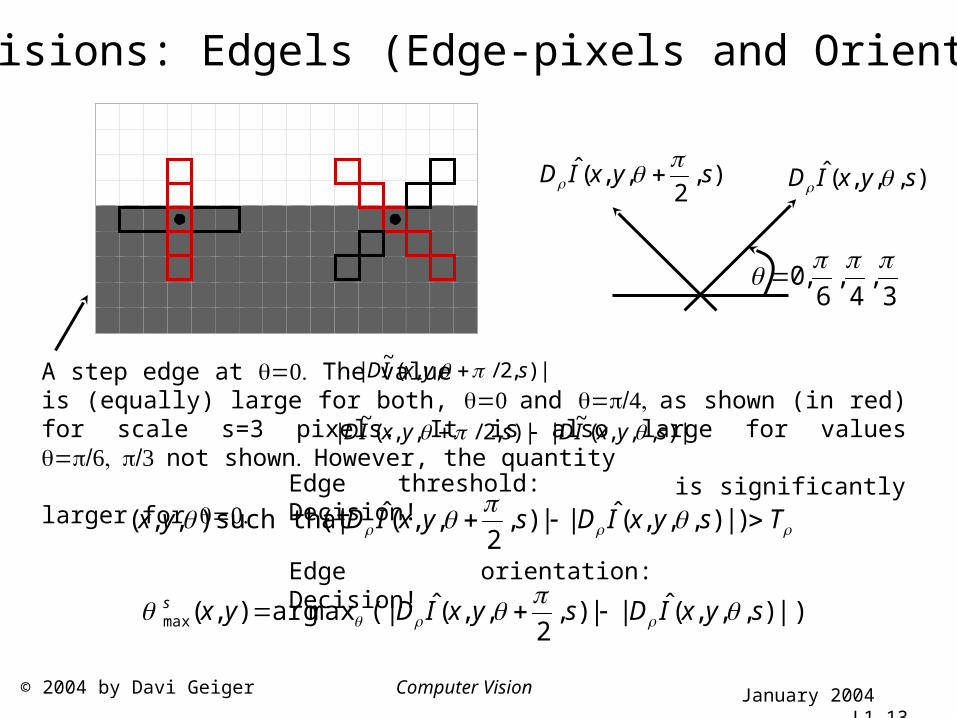
Decisions: Edgels (Edge-pixels and Orientation)
)|),,,(ˆ||),2
,,(ˆ|(maxarg),(max syxIDsyxIDyxs
TsyxIDsyxIDyx )|),,,(ˆ||),2
,,(ˆ|( such that ),,(
Edge threshold: Decision!
Edge orientation: Decision!
A step edge at The value is (equally) large for both, and as shown (in red) for scale s=3 pixels. It is also large for values not shownHowever, the quantity is significantly larger for
|),2/,,(~
| syxID
|),,,(~
||),2/,,(~
| syxIDsyxID
),,,(ˆ syxID ),
2,,(ˆ syxID
3,
4,
6,0
Computer Vision January 2004 L1.14© 2004 by Davi Geiger
),(3max yx
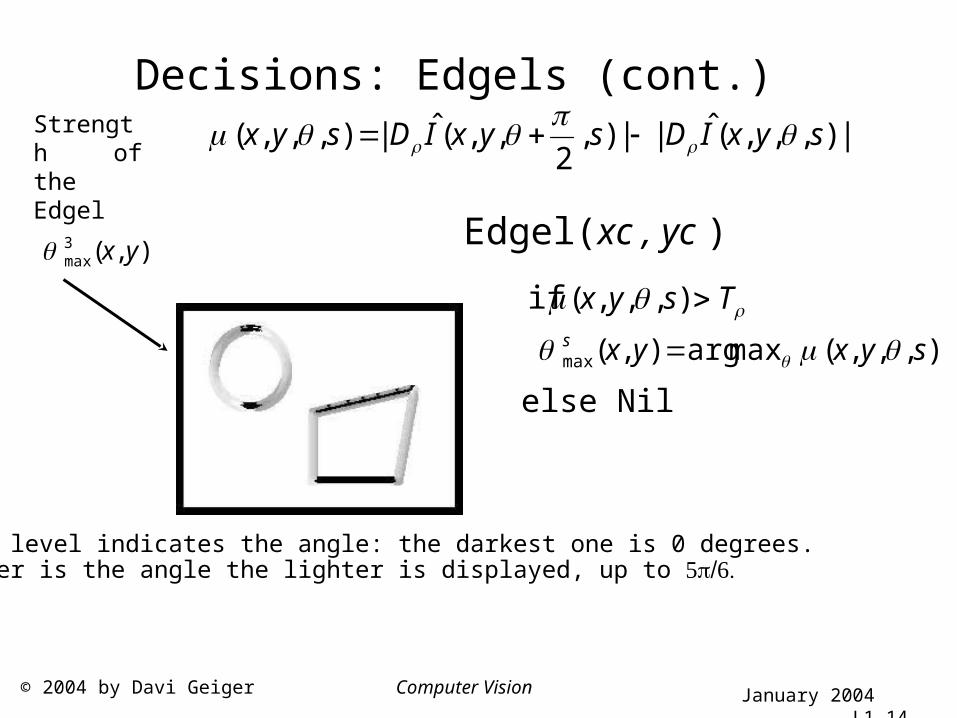
The gray level indicates the angle: the darkest one is 0 degrees. The larger is the angle the lighter is displayed, up to
|),,,(ˆ||),2
,,(ˆ|),,,( syxIDsyxIDsyx Strength of the Edgel
Decisions: Edgels (cont.)
Edgel(xc , yc ) if
else Nil
Tsyx ),,,(
),,,(maxarg),(max syxyxs
Computer Vision January 2004 L1.15© 2004 by Davi Geiger
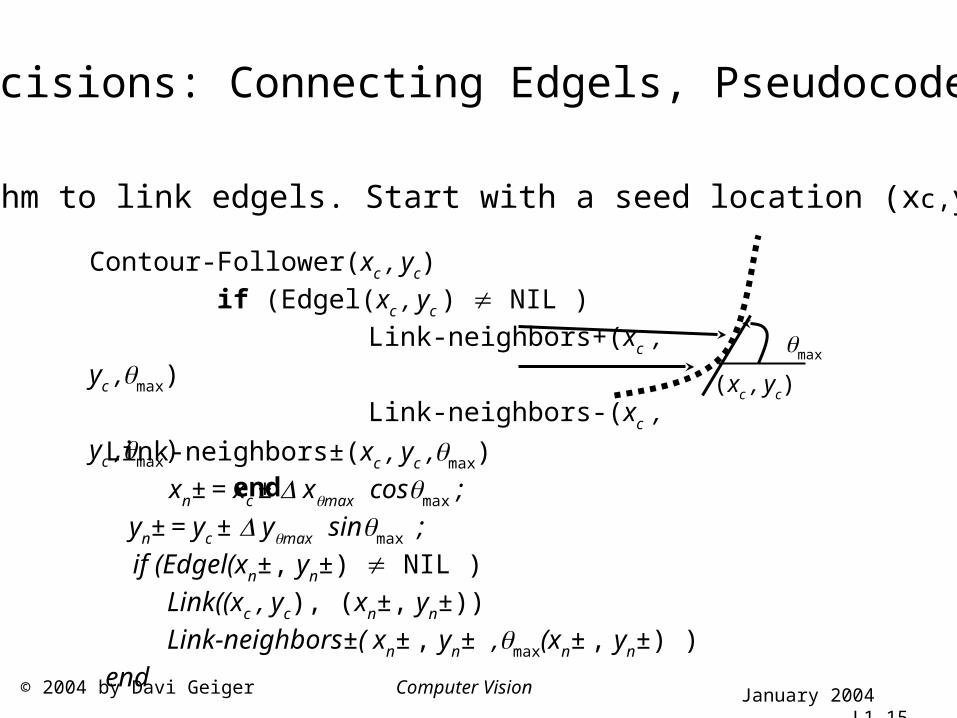
Decisions: Connecting Edgels, Pseudocode
Algorithm to link edgels. Start with a seed location (xc,yc)
Contour-Follower(xc , yc)
if (Edgel(xc , yc ) NIL )
Link-neighbors+(xc , yc ,max)
Link-neighbors-(xc , yc ,max)
end
Link-neighbors±(xc , yc ,max)
xn± = xc ± xmax cosmax ;
yn± = yc ± ymax sinmax ;
if (Edgel(xn±, yn±) NIL )
Link((xc , yc), (xn±, yn±))
Link-neighbors±( xn± , yn± ,max(xn± , yn±) )
end
max
(xc , yc)
Computer Vision January 2004 L1.16© 2004 by Davi Geiger
Decisions: Connecting Edgels, Pseudocode
Link-neighbors±(xc , yc ,max-c)
xn± = xc ± xmax cosmax ;
yn± = yc ± ymax sinmax ;
if ((Edgel(xn±, yn±) NIL )&(Coherence(xc , yc xn±, yn±)))
Link((xc , yc), (xn±, yn±))
Link-neighbors±( xn± , yn± ,max-n(xn± , yn±) )
endCoherence is used so that contrast does not change and contours can not return on the same path.Coherence(xc , yc xn, yn )
if ( and ) return True else Nilend
1maxmax |),2
,,(~
),2
,,(~
| TsyxIsyxI cccnnn
1maxmax |),2
3,,(
~),
2
3,,(
~| TsyxIsyxI cccnnn
Computer Vision January 2004 L1.17© 2004 by Davi Geiger
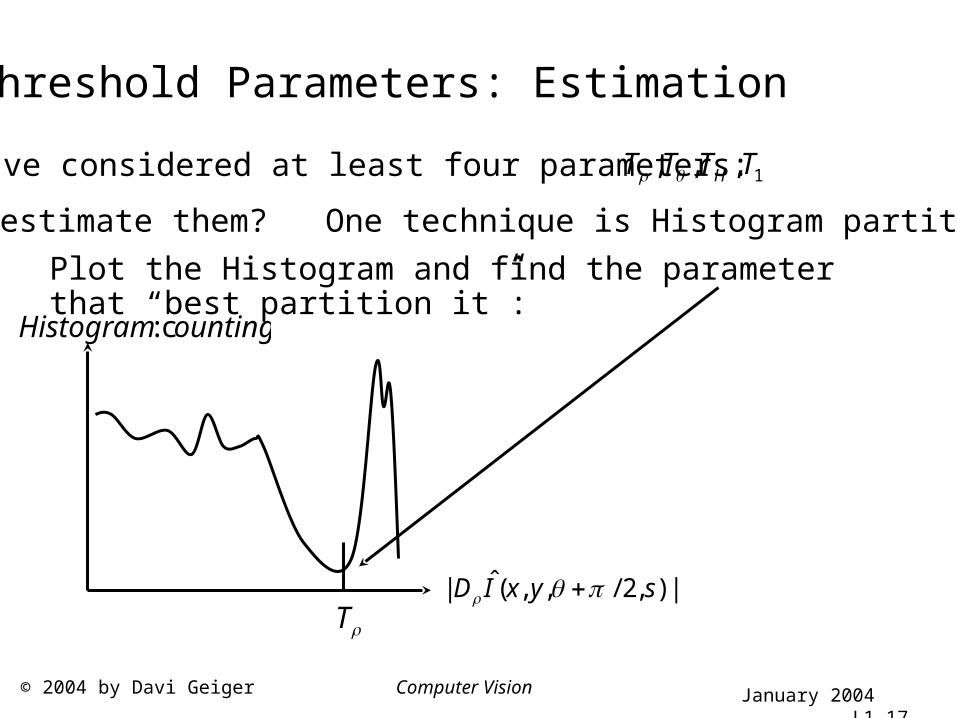
Threshold Parameters: Estimation
We have considered at least four parameters: 1,,, TTTT H
How to estimate them? One technique is Histogram partition:
Plot the Histogram and find the parameter that “best partition it”:
|),2/,,(ˆ| syxID
ountingHistogram c:
T
Computer Vision January 2004 L1.18© 2004 by Davi Geiger
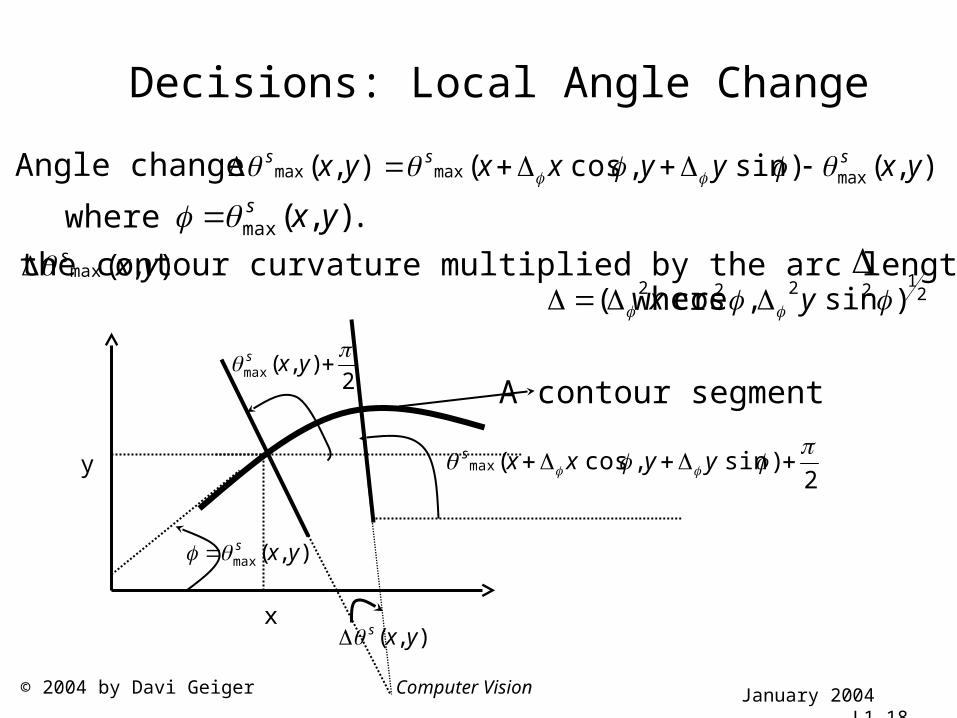
Decisions: Local Angle Change
),()sin,cos(),( maxmaxmax yxyyxxyx sss Angle change
y
x
),(max yxs
2)sin,cos(max yyxxs
2),(max
yxs
A contour segment
),( yxs
212222 )sin,cos( yx
is the contour curvature multiplied by the arc length , where
),(max yxs .),(max yxs where
Computer Vision January 2004 L1.19© 2004 by Davi Geiger
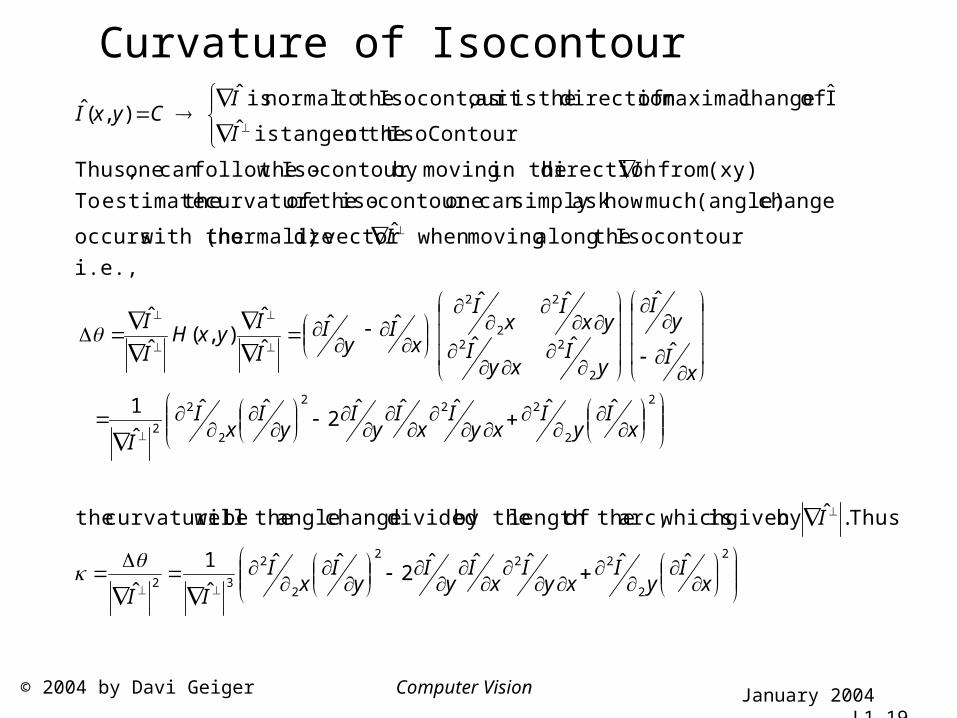
Curvature of Isocontour
2
2
222
2
2
32
2
2
222
2
2
2
2
22
2
2
2
ˆˆˆˆˆ2ˆˆ
ˆ
1
ˆ
Thus, .ˆby given is which arc, theoflength by the divided change angle thebe willcurvature the
ˆˆˆˆˆ2ˆˆ
ˆ
1
ˆ
ˆ
ˆˆ
ˆˆˆˆ
ˆ
ˆ),(
ˆ
ˆ
i.e.,
Isocontour thealong movingwhen ˆ vector d)(normalize with theoccurs
change (angle)much howask simply can onecontour -iso theof curvature theestimate To
y)(x, from direction in the movingby contour -Iso thefollowcan one Thus,
IsoContour theo tangent tisˆ
I of change maximal ofdirection theisit as ,Isocontour the tonormal isˆ),(ˆ
xI
yI
xyI
xI
yI
yI
xI
II
I
xI
yI
xyI
xI
yI
yI
xI
I
xI
yI
yI
xyI
yxI
xI
xI
yI
I
IyxH
I
I
I
I
I
ICyxI
Computer Vision January 2004 L1.20© 2004 by Davi Geiger
IIyxH
yxHyxH
IIyxHII
IyxHII
yxHII
I
ICyxI
ˆandˆ thengrepresenti),( of rseigenvecto two
for thesearch theas maximal isother theandlowest is onesuch that sderivative
orthogonal twoof smeasurmentby drepresente ,detector" edge"our interpret nowcan We
negative.-non are seigenvalue thei.e., matrix,
symmetric a is),( that Notezero. be to),( of eigenvaluesmallest expect the we
)0( curvature zero i.e., segments),(straight linesstraight are that contours-isofor Thus,
ˆˆ),()ˆ(ˆ
1
thereforeis eigenvalueminimun theand
,ˆ),()ˆ(ˆ
1
thereforeis eigenvalue maximum Thes.eigenvalueminimun and maximum
thetoingcorrespond),( of rseigenvecto theare ˆ andˆ vectors, two theseThus,
IsoContour theo tangent tisˆ
I of change maximal ofdirection theisit as ,Isocontour the tonormal isˆ),(ˆ
2min
2max