Embed Size (px)
DESCRIPTION
第一章 自动控制的一般概念. 1-1 自动控制的任务. 1- 2 自动控制的基本方式. 1- 3 对控制系统的性能要求. 返回主目录. 1-1 自动控制的任务. 通常,在自动控制技术中,把工作的机器设备称为被控对象,把表征这些机器设备工作状态的物理参量称为被控量,而对这些物理参量的要求值称为给定值或希望值(或参考输入)。则控制的任务可概括为:使被控对象的被控量等于给定值。即. 返回子目录. 控制器. 气动阀门. 流入. Q 1. 浮子. 水箱. H. 流出 Q 2. 下面通过具体例子来说明自动控制和自动控制系统的概念. 水位自动控制系统. - PowerPoint PPT Presentation
Citation preview

1
第一章 自动控制的一般概念
1-1 自动控制的任务
1- 2自动控制的基本方式
1- 3对控制系统的性能要求
返回主目录

2
1-1 自动控制的任务• 通常,在自动控制技术中,把工作的机器设备称
为被控对象,把表征这些机器设备工作状态的物理参量称为被控量,而对这些物理参量的要求值称为给定值或希望值(或参考输入)。则控制的任务可概括为:使被控对象的被控量等于给定值。即
( ) ( )c t r t
返回子目录
3
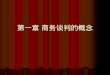
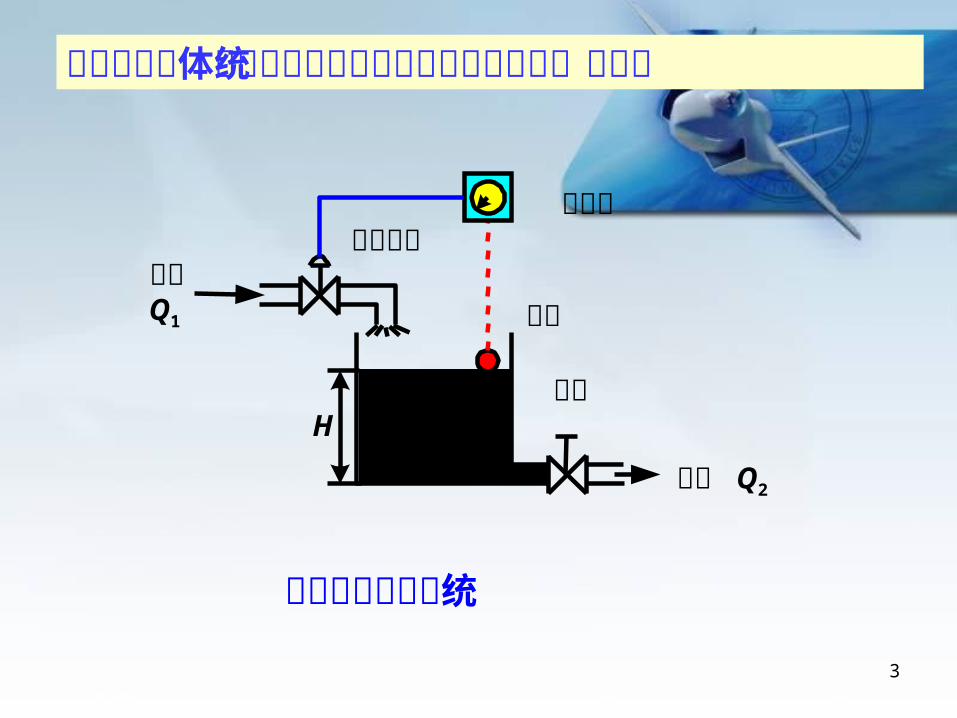
下面通过具体例子来说明自动控制和自动控制系统的概念
控制器气动阀门
流入Q1 浮子
水箱
流出 Q2
H
水位自动控制系统
4
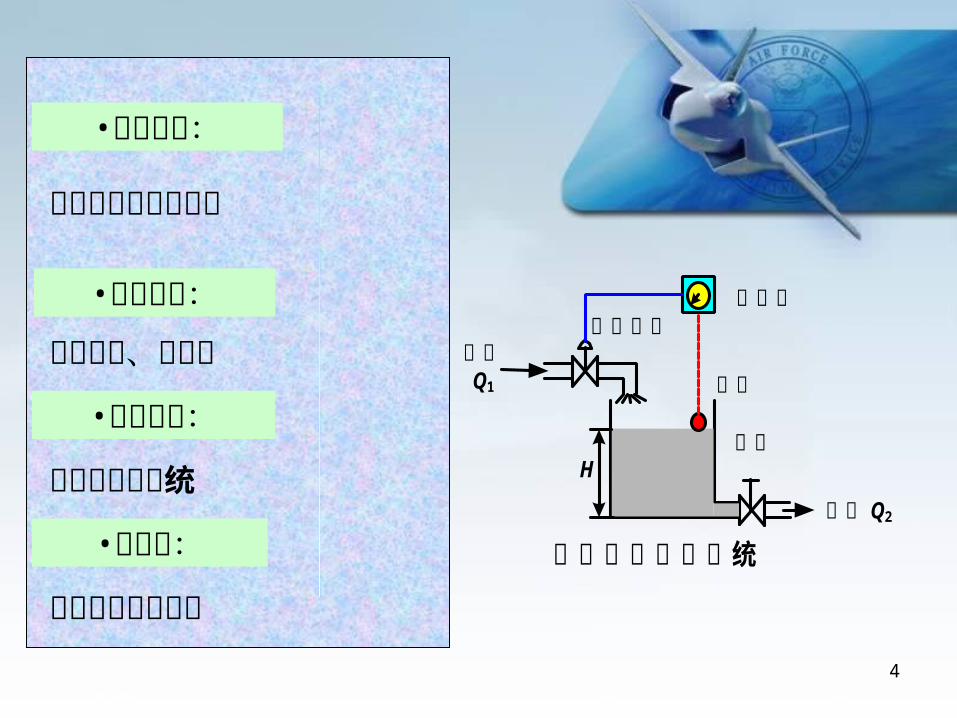
控制器气动阀门
流入 Q1 浮子
水箱
流出 Q2
H
水位自动控制系统
•控制任务:
维持水箱内水位恒定
•控制装置:
气动阀门、控制器
•受控对象:
水箱、供水系统
•被控量:
水箱内水位的高度

5
控制器气动阀门
流入 Q1 浮子
水箱
流出 Q2
H
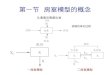
水位自动控制系统
•给定值:控制器刻度盘指针标定的预定水位高度•测量装置:
浮子•比较装置:
控制器刻度盘•干扰:水的流出量和流入量的变化都将破坏水位保持恒定
6
自动控制,即没有人直接参与的控制。其基本任务是:在无人直接参与的情况下,利用控制装置操纵被控对象,使被控制量等于给定值。
自动控制系统:指能够完成自动控制任务的设备,一般由控制装置和被控对象组成。
由此可见:
7
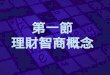
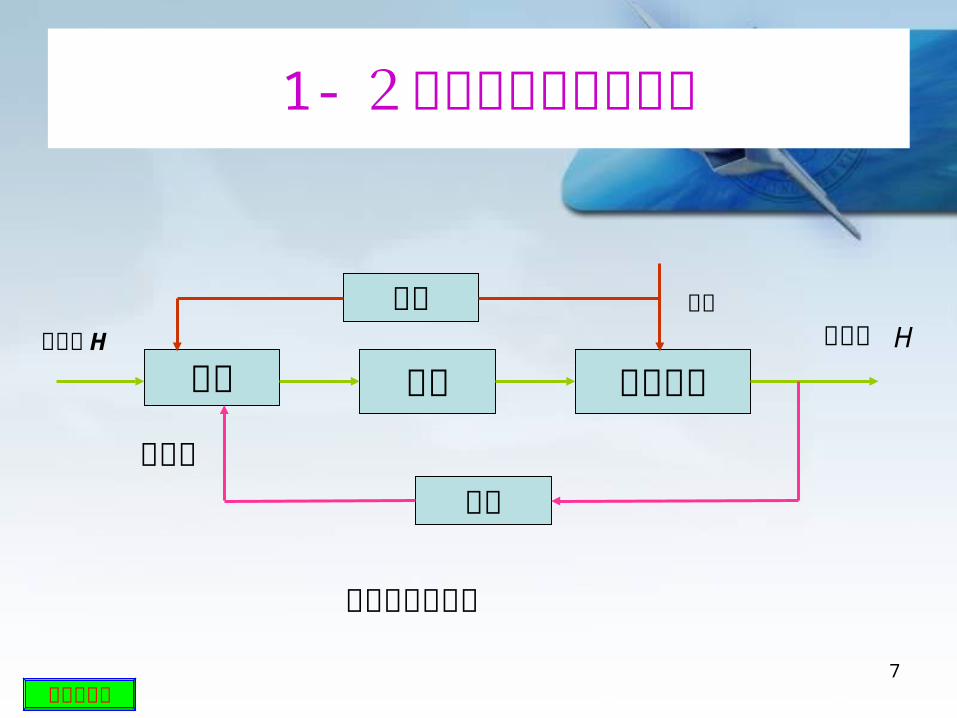
1- 2自动控制的基本方式
被控量比较 执行
测量
被控对象
实测值
干扰测量给定值 H
自动控制方框图
返回子目录
H

8
在上图中,除被控对象外的其余部分统称为控制装置,它必须包含以下三种职能部件。
测量元件:用以测量被控量或干扰量。比较元件:将被控量与给定值进行比较。执行元件:根据比较后的偏差,产生执行作用,去操
纵被控对象
参与控制的信号来自给定值、干扰量、被控量。

9
• 开环控制—— 按给定值操纵的开环控制—— 按干扰补偿的开环控制
• 按偏差调节的闭环控制• 复合控制
下面根据不同的信号源来分析自动控制的几种基本控制方式

10
一、按给定值操纵的开环控制
计算 执行 受控对象给定值
干扰
被控量
按给定值操纵的开环控制系统原理方框图
•开环控制——系统的输出端与输入端之间不存在反馈回路,输出量对系统的控制作用没有影响。

11
炉温控制系统
炉温控制系统原理方框图
定时开关 炉子电阻丝0T给定炉温 T实际炉温
12
按给定值操纵的开环控制
特点:控制装置只按给定值来控制受控对象。
优点:控制系统结构简单,相对来说成本低。
缺点:对可能出现的被控量偏离给定值的偏差没有任何修正能力,抗干扰能力差,控制精度不高。

13
二、按干扰补偿的开环控制定义:利用干扰信号产生控制作用,以及时
补偿干扰对被控量的直接影响。
计算
测量
受控对象执行
干扰
被控量
特点:只能对可测干扰进行补偿,对不可测干扰以及受控对象、各功能部件内部参数变化对被控量的影响,系统自身无法控制。
适用于:存在强干扰且变化比较剧烈的场合。

14
水位高度控制系统原理图
水位高度控制系统原理方框图

15
三、按偏差调节的闭环控制 特点:通过计算被控量和给定值的差值来控制被控对象。
优点:可以自动调节由于干扰和内部参数的变化 而引起的变动。
计算比较给定值 E
执行 被控对象
干扰
被控量
测量
-
按偏差调节的系统原理方框图
16
如上图所示,反馈回来的信号与给定值相减,即根据偏差进行控制,称为负反馈,反之称为正反馈。
这种控制方式控制精度较高,因为无论是干扰的作用,还是系统结构参数的变化,只要被控量偏离给定值,系统就会自行纠偏。但是闭环控制系统的参数如果匹配得不好,会造成被控量的较大摆动,甚至系统无法正常工作。

17
控制任务:保持转台的实际转速等于期望转速。
被控对象:转台。
被控量: 转台转速。
例 转台速度控制系统
直流放大器
电池
速度设定ur
速度转台
直流电机+
-
转速计uc
Du ua
w
放大器 直流电机 转台
转速计
+
-
ur u
cu
au
转台速度闭环控制系统原理方框图

18
飞机自动驾驶系统原理图
例 飞机 - 自动驾驶仪系统
19
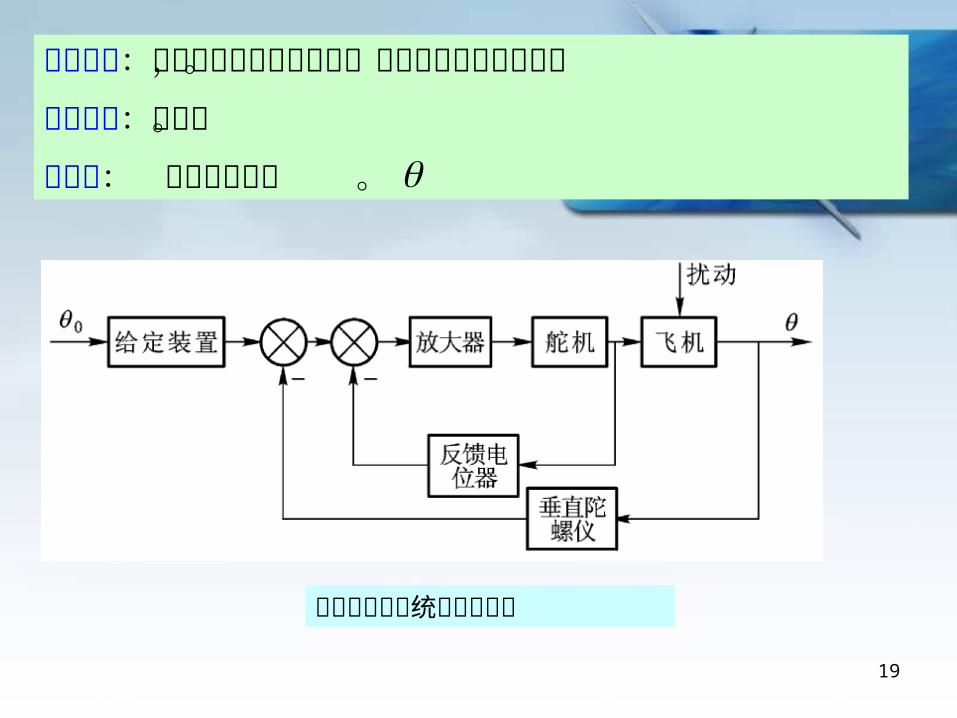
控制任务:系统在任何扰动作用下,保持飞机俯仰角不变。
被控对象:飞机。
被控量: 飞机的俯仰角 。
俯仰角控制系统原理方框图

20
四、复合控制复合控制就是开环控制和闭环控制相结合的一种控制。实质上,它是在闭环控制回路的基础上,附加了一个输入信号或扰动作用的顺馈通路,来提高系统的控制精度。
控制装置 被控对象 CR
—
补偿装置
a. 按输入作用补偿
b. 按扰动作用补偿
n
控制装置 被控对象 CR
—
补偿装置

21
1- 3对控制系统的性能要求
• 定义:通常把系统受到外作用后,被控量随时间变化的全过程,称为动态过程或过渡过程。
工程上常从稳、快、准三个方面来评价控制系统。 稳: 指控制系统的稳定性与平稳性。 快: 指控制系统的快速性。 准: 指控制系统的最终精度(稳态精度)。
返回子目录

22
稳: 指控制系统的稳定性与平稳性
控制系统动态过程曲线
如上图所示,系统在外力作用下,输出逐渐与期望值一致,则系统是稳定的,如曲线①所示;反之,输出如曲线②所示,则系统是不稳定的。

23
快: 指控制系统的快速性
快速性即动态过程进行的时间的长短。过程时间越短,说明系统快速性越好,反之说明系统响应迟钝,如曲线①所示。
稳和快反映了系统动态过程性能的好坏。既快又稳,表明系统的动态精度高。

24
准: 指系统在动态过程结束后,其被控量(或反馈量)与给定值的偏差,这一偏差称为稳态误差,是衡量稳态精度的指标,反映了系统后期稳态的性能。
以上分析的稳、快、准三方面的性能指标往往由于被控对象的具体情况不同,各系统要求也有所侧重,而且同一个系统的稳、快、准的要求是相互制约的。