Embed Size (px)
Citation preview

技 術 論 文
1
2
114

Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ 2=z2+y2 (4)
(3) (4)
= + (5)
U = m g y (6)
(6) (2) U = m g h cos (7)
(5) (1)(2)
= (8)
+ =u (9)
(8)
=
(7) =
0
/
m = 200kg h = 0.5m
F Fig.2
t
90 1.6
5 1
2-2.
Fig.3GC Triangle
(GC)
GC Vector
F
FR GC
Fig.3 GC Triangle
Fig.2 -TIME
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ 2=z2+y2 (4)
(3) (4)
= + (5)
U = m g y (6)
(6) (2) U = m g h cos (7)
(5) (1)(2)
= (8)
+ =u (9)
(8)
=
(7) =
0
/
m = 200kg h = 0.5m
F Fig.2
t
90 1.6
5 1
2-2.
Fig.3GC Triangle
(GC)
GC Vector
F
FR GC
Fig.3 GC Triangle
Fig.2 -TIME
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ 2=z2+y2 (4)
(3) (4)
= + (5)
U = m g y (6)
(6) (2) U = m g h cos (7)
(5) (1)(2)
= (8)
+ =u (9)
(8)
=
(7) =
0
/
m = 200kg h = 0.5m
F Fig.2
t
90 1.6
5 1
2-2.
Fig.3GC Triangle
(GC)
GC Vector
F
FR GC
Fig.3 GC Triangle
Fig.2 -TIME
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ 2=z2+y2 (4)
(3) (4)
= + (5)
U = m g y (6)
(6) (2) U = m g h cos (7)
(5) (1)(2)
= (8)
+ =u (9)
(8)
=
(7) =
0
/
m = 200kg h = 0.5m
F Fig.2
t
90 1.6
5 1
2-2.
Fig.3GC Triangle
(GC)
GC Vector
F
FR GC
Fig.3 GC Triangle
Fig.2 -TIME
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ 2=z2+y2 (4)
(3) (4)
= + (5)
U = m g y (6)
(6) (2) U = m g h cos (7)
(5) (1)(2)
= (8)
+ =u (9)
(8)
=
(7) =
0
/
m = 200kg h = 0.5m
F Fig.2
t
90 1.6
5 1
2-2.
Fig.3GC Triangle
(GC)
GC Vector
F
FR GC
Fig.3 GC Triangle
Fig.2 -TIME
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ 2=z2+y2 (4)
(3) (4)
= + (5)
U = m g y (6)
(6) (2) U = m g h cos (7)
(5) (1)(2)
= (8)
+ =u (9)
(8)
=
(7) =
0
/
m = 200kg h = 0.5m
F Fig.2
t
90 1.6
5 1
2-2.
Fig.3GC Triangle
(GC)
GC Vector
F
FR GC
Fig.3 GC Triangle
Fig.2 -TIME
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ 2=z2+y2 (4)
(3) (4)
= + (5)
U = m g y (6)
(6) (2) U = m g h cos (7)
(5) (1)(2)
= (8)
+ =u (9)
(8)
=
(7) =
0
/
m = 200kg h = 0.5m
F Fig.2
t
90 1.6
5 1
2-2.
Fig.3GC Triangle
(GC)
GC Vector
F
FR GC
Fig.3 GC Triangle
Fig.2 -TIME
YAMAHA MOTOR TECHNICAL REVIEW
Study on autonomous motorcycle control mechanism
2018 No.28-18 20185118
Abstract Theoretical and experimental evaluations have been carried out for the straight-line stability during high-speed in motorcycles for many years, and have been also applied to actual development. On the other hand, stability is lost when traveling at extremely low speed, and method of maintaining the stability has also been studied in recent years. In addition, research on two-wheeled vehicles realizing the standing stability control by mounting a large-sized gyroscope has been performed. Here, we are reported the results of improvement of stability at extremely low speed and standing stability control not by adopting mechanical gyroscope but by adding flexibility to the structure of the body.
1.
[1]
[2][3]
[4][5]
[6]
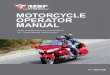
2.2-1. “0
0km/h
z-y Fig.1
z = h sin (1) y = h cos (2)
= (3)
Fig.1 Inverted pendulum model
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ 2=z2+y2 (4)
(3) (4)
= + (5)
U = m g y (6)
(6) (2) U = m g h cos (7)
(5) (1)(2)
= (8)
+ =u (9)
(8)
=
(7) =
0
/
m = 200kg h = 0.5m
F Fig.2
t
90 1.6
5 1
2-2.
Fig.3GC Triangle
(GC)
GC Vector
F
FR GC
Fig.3 GC Triangle
Fig.2 -TIME
YAMAHA MOTOR TECHNICAL REVIEW
Study on autonomous motorcycle control mechanism
2018 No.28-18 20185118
Abstract Theoretical and experimental evaluations have been carried out for the straight-line stability during high-speed in motorcycles for many years, and have been also applied to actual development. On the other hand, stability is lost when traveling at extremely low speed, and method of maintaining the stability has also been studied in recent years. In addition, research on two-wheeled vehicles realizing the standing stability control by mounting a large-sized gyroscope has been performed. Here, we are reported the results of improvement of stability at extremely low speed and standing stability control not by adopting mechanical gyroscope but by adding flexibility to the structure of the body.
1.
[1]
[2][3]
[4][5]
[6]
2.2-1. “0
0km/h
z-y Fig.1
z = h sin (1) y = h cos (2)
= (3)
Fig.1 Inverted pendulum model
θ..( ) θ
.( )
115

4
3
116

Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ =Fi
AMCES M Q2M Q1 -M
q1 q2
+
= 1 1
+ 2( +
2 ) + 1 + 2
+ 2( + ) 2
+ 2
2
+ 2 + 2
+ 2
+ 2 2(
+ ) 2
+ 1 1
+ 2( +
) =
+
= 2( + ) 2
+ 2
+ 2 + 2 + 2
+ 2
2 2
2
+ 2(
+ )
+ 2 2 + 2
+ 2 +
+ 2(
) =
R = P2x + P2y S = P2x P2y q1 q2
q1 q2 2
=1
{ + ( ) +
+ ( + ) + ( ) }
1
{ + ( + )
+ ( ) + ( + ) }
1 1 + 2( + 2 ) + 1 + 2 = 2( + ) 2 + 2 = 2( + ) 2 + 2
= 2 + 2 + 2 2 2 2( + ) 1 1
= { }
=
10 0 0
( + )0 0 0
+ ( )
+1
0
0+
Q1
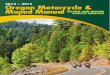
[7] 212
Fig.8 Standup simulation
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ =Fi
AMCES M Q2M Q1 -M
q1 q2
+
= 1 1
+ 2( +
2 ) + 1 + 2
+ 2( + ) 2
+ 2
2
+ 2 + 2
+ 2
+ 2 2(
+ ) 2
+ 1 1
+ 2( +
) =
+
= 2( + ) 2
+ 2
+ 2 + 2 + 2
+ 2
2 2
2
+ 2(
+ )
+ 2 2 + 2
+ 2 +
+ 2(
) =
R = P2x + P2y S = P2x P2y q1 q2
q1 q2 2
=1
{ + ( ) +
+ ( + ) + ( ) }
1
{ + ( + )
+ ( ) + ( + ) }
1 1 + 2( + 2 ) + 1 + 2 = 2( + ) 2 + 2 = 2( + ) 2 + 2
= 2 + 2 + 2 2 2 2( + ) 1 1
= { }
=
10 0 0
( + )0 0 0
+ ( )
+1
0
0+
Q1
[7] 212
Fig.8 Standup simulation
+ =Fi
AMCES M Q2M Q1 -M
q1 q2
+
= 1 1
+ 2( +
2 ) + 1 + 2
+ 2( + ) 2
+ 2
2
+ 2 + 2
+ 2
+ 2 2(
+ ) 2
+ 1 1
+ 2( +
) =
+
= 2( + ) 2
+ 2
+ 2 + 2 + 2
+ 2
2 2
2
+ 2(
+ )
+ 2 2 + 2
+ 2 +
+ 2(
) =
R = P2x + P2y S = P2x P2y q1 q2
q1 q2 2
=1
{ + ( ) +
+ ( + ) + ( ) }
1
{ + ( + )
+ ( ) + ( + ) }
1 1 + 2( + 2 ) + 1 + 2 = 2( + ) 2 + 2 = 2( + ) 2 + 2
= 2 + 2 + 2 2 2 2( + ) 1 1
= { }
=
10 0 0
( + )0 0 0
+ ( )
+1
0
0+
Q1
[7] 212
Fig.8 q1 0
Fig.8 Standup simulation
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ =Fi
AMCES M Q2M Q1 -M
q1 q2
+
= 1 1
+ 2( +
2 ) + 1 + 2
+ 2( + ) 2
+ 2
2
+ 2 + 2
+ 2
+ 2 2(
+ ) 2
+ 1 1
+ 2( +
) =
+
= 2( + ) 2
+ 2
+ 2 + 2 + 2
+ 2
2 2
2
+ 2(
+ )
+ 2 2 + 2
+ 2 +
+ 2(
) =
R = P2x + P2y S = P2x P2y q1 q2
q1 q2 2
=1
{ + ( ) +
+ ( + ) + ( ) }
1
{ + ( + )
+ ( ) + ( + ) }
1 1 + 2( + 2 ) + 1 + 2 = 2( + ) 2 + 2 = 2( + ) 2 + 2
= 2 + 2 + 2 2 2 2( + ) 1 1
= { }
=
10 0 0
( + )0 0 0
+ ( )
+1
0
0+
Q1
[7] 212
Fig.8 Standup simulation
Study on autonomous motorcycle control mechanism
YAMAHA MOTOR TECHNICAL REVIEW
+ =Fi
AMCES M Q2M Q1 -M
q1 q2
+
= 1 1
+ 2( +
2 ) + 1 + 2
+ 2( + ) 2
+ 2
2
+ 2 + 2
+ 2
+ 2 2(
+ ) 2
+ 1 1
+ 2( +
) =
+
= 2( + ) 2
+ 2
+ 2 + 2 + 2
+ 2
2 2
2
+ 2(
+ )
+ 2 2 + 2
+ 2 +
+ 2(
) =
R = P2x + P2y S = P2x P2y q1 q2
q1 q2 2
=1
{ + ( ) +
+ ( + ) + ( ) }
1
{ + ( + )
+ ( ) + ( + ) }
1 1 + 2( + 2 ) + 1 + 2 = 2( + ) 2 + 2 = 2( + ) 2 + 2
= 2 + 2 + 2 2 2 2( + ) 1 1
= { }
=
10 0 0
( + )0 0 0
+ ( )
+1
0
0+
Q1
[7] 212
Fig.8 Standup simulation
2
21
状態量を{ 1 ̇1 2 ̇2} と置き
+ =Fi
AMCES M Q2M Q1 -M
q1 q2
+
= 1 1
+ 2( +
2 ) + 1 + 2
+ 2( + ) 2
+ 2
2
+ 2 + 2
+ 2
+ 2 2(
+ ) 2
+ 1 1
+ 2( +
) =
+
= 2( + ) 2
+ 2
+ 2 + 2 + 2
+ 2
2 2
2
+ 2(
+ )
+ 2 2 + 2
+ 2 +
+ 2(
) =
R = P2x + P2y S = P2x P2y q1 q2
q1 q2 2
=1
{ + ( ) +
+ ( + ) + ( ) }
1
{ + ( + )
+ ( ) + ( + ) }
1 1 + 2( + 2 ) + 1 + 2 = 2( + ) 2 + 2 = 2( + ) 2 + 2
= 2 + 2 + 2 2 2 2( + ) 1 1
= { }
=
10 0 0
( + )0 0 0
+ ( )
+1
0
0+
Q1
[7] 212
Fig.8 q1 0
Fig.8 Standup simulation
+ =Fi
AMCES M Q2M Q1 -M
q1 q2
+
= 1 1
+ 2( +
2 ) + 1 + 2
+ 2( + ) 2
+ 2
2
+ 2 + 2
+ 2
+ 2 2(
+ ) 2
+ 1 1
+ 2( +
) =
+
= 2( + ) 2
+ 2
+ 2 + 2 + 2
+ 2
2 2
2
+ 2(
+ )
+ 2 2 + 2
+ 2 +
+ 2(
) =
R = P2x + P2y S = P2x P2y q1 q2
q1 q2 2
=1
{ + ( ) +
+ ( + ) + ( ) }
1
{ + ( + )
+ ( ) + ( + ) }
1 1 + 2( + 2 ) + 1 + 2 = 2( + ) 2 + 2 = 2( + ) 2 + 2
= 2 + 2 + 2 2 2 2( + ) 1 1
= { }
=
10 0 0
( + )0 0 0
+ ( )
+1
0
0+
Q1
[7] 212
Fig.8 q1 0
Fig.8 Standup simulation
117

118

119

5
120