Embed Size (px)
Citation preview
EMR seminarLausanneSept. 2014
Seminar Sept. 2014“Energetic Macroscopic Representation”
«« EMR EMR OF ANOF AN EELECTRICLECTRIC VVEHICLEEHICLE »»
Dr. W. Lhomme, Prof. A. Bouscayrol, (L2EP, Université Lille1, France,)
http://www.emrwebsite.org/

EPF Lausanne, September 20142
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Introduction -
model representation simulation
Simulation is a key issue before working on a real system…
Tazzari Zero of L2EP
realsystem
i miV mu
dcmchopchop
batchopchop
dcmarmdcmchopdcmarm iReuidtdL
geardcmdcm
dcmdcmdcmke
ikT
geargeardcmgear fTTdtdJ
diffgeargear
dcmgeargear
k
TkT
whdifdif
geardifdif
k
TkT
restotev FFvdtdM
Which kind of model?
How to define control?
How to organize Simulation?

EPF Lausanne, September 20143
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Outline -
1. Studied EV - Modelling
2. EMR of the EV
3. Control of the EV (objective)
4. More complex EVs

EMR seminarLausanneSept. 2014
Seminar Sept. 2014“Energetic Macroscopic Representation”
«« SSTUDIEDTUDIED EELECTRICLECTRIC VVEHICLEEHICLE
-- MMODELLINGODELLING SSTEP TEP »»

EPF Lausanne, September 20145
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Tazzari Zero EV -
ubat iim2
1 2 3 Tim
geariim1
its
Tazzari Zero characteristics
• 15 kW induction machine• 80V 160Ah LiFePO4 battery• 542 kg (empty mass)• Maximum speed: 85km/h

EPF Lausanne, September 20146
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Simplified EV -
Objective: control of the traction system
Simplifications: • a permanent magnet DC machine is considered in a first step• an equivalent wheel is considered (no curve)
ubat
i Tim
gear
its

EPF Lausanne, September 20147
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Modelling -
Battery: • RE model
Chopper: • ideal power switches• average modelling
)( )()()( )()(
chop
chop
titmtitVtmtu
dcmchop
batchop
(t))()( chopbat RitEtV
EPF Lausanne, September 20148
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
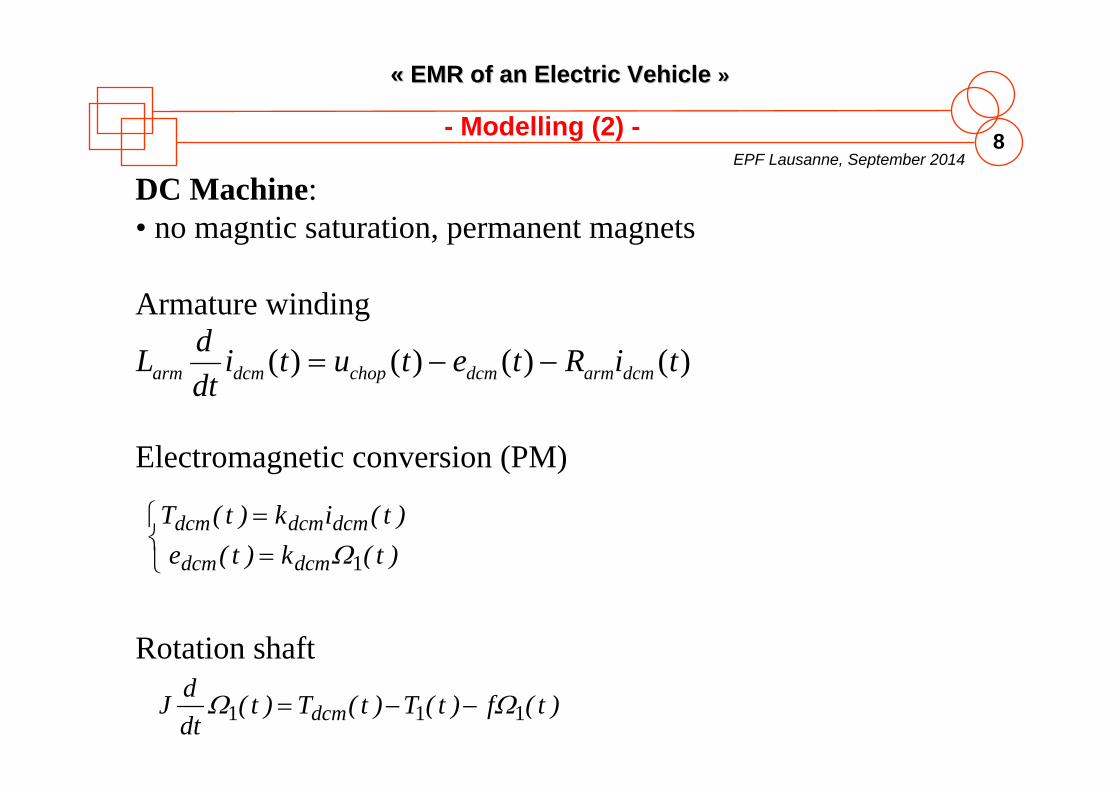
- Modelling (2) -
DC Machine: • no magntic saturation, permanent magnets
Armature winding
Electromagnetic conversion (PM)
Rotation shaft
)()()()( tiRtetutidtdL dcmarmdcmchopdcmarm
)t(k)t(e)t(ik)t(T
dcmdcm
dcmdcmdcm
1
)t(f)t(T)t(T)t(dtdJ dcm 111

EPF Lausanne, September 20149
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Modelling (3) -
Gearbox: • no losses
Wheel: • no slip
Chassis:
Environment:
)t(k)t(
)t(Tk)t(T
gear
gear
21
12
)t(vR
)t(
)t(TR
)t(F
evwh
whwh
1
1
2
2
)()()( tFtFtvdtdM reswhev
)(sin)()()( 20 tMgtbvtvaFtF evevres

EMR seminarLausanneSept. 2014
Seminar Sept. 2014“Energetic Macroscopic Representation”
«« EMR EMR OF THEOF THE EV EV --MMODELODEL OORGANIZATION RGANIZATION »»

EPF Lausanne, September 201411
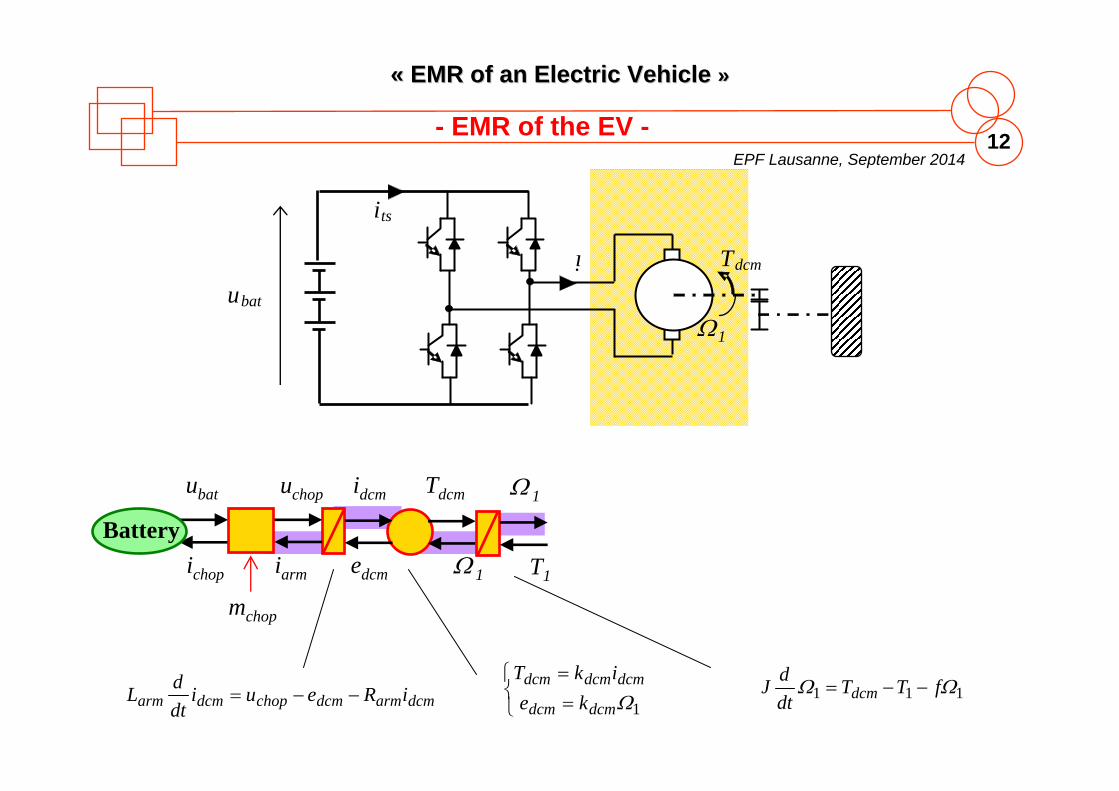
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- EMR of the EV -
ubat
Tdcm
1
its
ubat
ichop
uchop
iarm
mchop
i u
chopchop
chopchop
arm
bat
imVm
Battery
StructuralRepresentation
Functional Description
EPF Lausanne, September 201412
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
idcm
- EMR of the EV -
ubat
i Tdcm
1
its
ubat
Batteryichop
uchop
iarm
Tdcm
1edcm
mchop
1
T1
dcmarmdcmchopdcmarm iReuidtdL 111 fTT
dtdJ dcm
1dcmdcm
dcmdcmdcmke
ikT

EPF Lausanne, September 201413
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- EMR of the EV -
ubat
i Tdcm
1r
its
ubat
Batteryichop
uchop
iarm
Tdcm
1 T2
idcm
edcm
mchop
Fwh
1
T1
2 vev
21
22
gear
gear
k
TkT
2
2whev
whwhRv
FRT

EPF Lausanne, September 201414
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- EMR of the EV -
ubat
i Tdcm
1
its
ubat
Batteryichop
uchop
iarm
Tdcmidcm
edcm
mchop
Fwh
Fres
vev
vev
restotev FFvdtdM
1 T2 Fwh
1
T1
2 vev

EPF Lausanne, September 201415
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- EMR of the EV -
ubat
i Tdcm
1
its
ubat
Batteryichop
uchop
iarm
Tdcmidcm
edcm
mchop
Fwh
Fres
vev
vev
Conflict of association:1 and vev state variables but 1gearwhev kRv
permutations
1 T2 Fwh
1
T1
2 vev
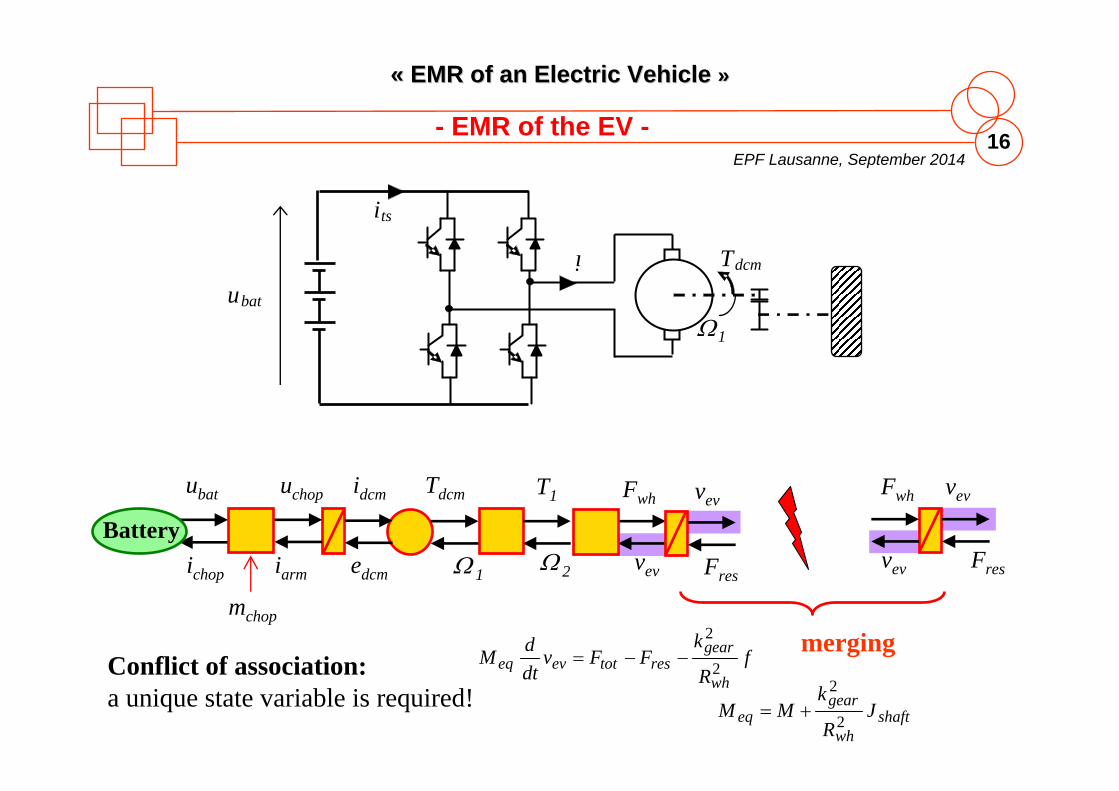
EPF Lausanne, September 201416
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- EMR of the EV -
ubat
i Tdcm
1
its
ubat
Batteryichop
uchop
iarm
Tdcm
1
idcm
edcm
mchop
Fwh
Fres 2 vev
Fwh
Fres
vev
vev
Conflict of association:a unique state variable is required!
merging
T1 vev
fR
kFFv
dtdM
wh
gearrestoteveq 2
2
shaftwh
geareq J
R
kMM 2
2

EPF Lausanne, September 201417
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- EMR of the EV -
ubat
Batteryichop
uchop
iarm
Tdcm
1
idcm
edcm
mchop
Fwh
Fres 2 vev
T1 vev
Env.
A
M g
Faero
½ Froll½ Froll
Fgrade
sinMgvACcosMgkF evxairrollres 221

EMR seminarLausanneSept. 2014
Seminar Sept. 2014“Energetic Macroscopic Representation”
«« CCONTROLONTROL OF THEOF THE
SSTUDIEDTUDIED EELECTRICLECTRIC VVEHICLEEHICLE »»

EPF Lausanne, September 201419
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Tuning path -
Objective: control the EV velocity
Tuning variable: modulation ratio of the DC-DC converter
chopper DC machine gearboxes wheel chassis
ubat
Batteryichop
uchop
iarm
Tdcm
1
idcm
edcmmchop
Fwh
Fres2 vev
T1 vev
Env.
Control ?vev-ref

EPF Lausanne, September 201420
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Maximum Control Structure -
Maximum Control Structure: • inversion of each element step-by-step• all variables are assume measurable
chopper DC machine gearboxes wheel chassis
ubat
Batteryichop
uchop
iarm
Tdcm
shaft
idcm
edcmmchop
Fwh
Fres gear diff vev
Tgear Tdiff vev
Env.
vev-refFwh-refTdiff-refTgear-refTdcm-refidcm-refuchop-ref

EPF Lausanne, September 201421
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Simulation -
Matlab-Simulink ©, using the EMR library

EPF Lausanne, September 201422
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- Implementation on the real vehicle -
ElectronicControl Unit
sensors

EMR seminarLausanneSept. 2014
Seminar Sept. 2014“Energetic Macroscopic Representation”
«« MMOREORE CCOMPLEXOMPLEX
EELECTRICLECTRIC VVEHICLESEHICLES »»

EPF Lausanne, September 201424
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
rwh
lwh
Tldiff
Trdiff
vveh
Fenv
diff
Tgear
JshTdcm
gear
Tload
gearfsh
ich-auch-a
ia
ubat
if uch-f
ich-f
itot
ea
ia
if
ef
Tdcm
gearuch-f
ia
uch-a
if
ENVTgear
diff
Tldiff
lwh
rwh
Tdiff
wh Trdiff
Flwh
vrwh
vlwhvvehFtot
Ftotvveh
Rt
Frwhitot
BATubat
mch-f
mch-aubat
ubat
ich-f
ich-a
wheels chassisgearbox differentialDC machinechoppersparallel
connection
- EV with a field-winding DC machine -

EMR seminarLausanneSept. 2014
Seminar Sept. 2014“Energetic Macroscopic Representation”
«« RREFERENCES EFERENCES »»

EPF Lausanne, September 201426
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
- References -
A. Bouscayrol, W. Lhomme, P. Delarue, B. Lemaire-Semail, S. Aksas, “Hardware-In-the-Loop simulation of electric vehicle traction systems using Energetic Macroscopic Representation”, IEEE-IECON'06, Paris, November 2006.
A. Bouscayrol, A. Bruyère, P. Delarue, F. Giraud, B. Lemaire-Semail, Y. Le Menach, W. Lhomme, F. Locment, “Teaching drive control using Energetic Macroscopic Representation - initiation level”, EPE'07, Aalborg, September 2007.
K. Chen, P. Delarue, A. Bouscayrol, R. Trigui, “Influence of control design on energetic performances of an electric vehicle”, IEEE-VPPC'07, Arlington (U.S.A.), September 2007.
K. Chen, A. Bouscayrol, W. Lhomme, “EMR and Inversion-based control: application to an Electric Vehicle with an electrical differential”, Journal of Asian Electric Vehicles, vol. 6, no.1, p. 1097-1102, June 2008.
K. Chen, A. Bouscayrol, A. Berthon, P. Delarue, D. Hissel, R. Trigui, W. Lhomme, “Global energetic modelling of different architecture Hybrid Electric Vehicles”, ElectrIMACS'08, Québec (Canada), May 2008.
C. Depature, W. Lhomme, A. Bouscayrol, “Teaching Electric Vehicle drive control using Energetic Macroscopic Representation”, EVS’27, Barcelona (Spain), November 2013.
W. Lhomme, Ph. Delarue, Ph. Barrade, A. Bouscayrol, “Maximum Control Structure of a series hybrid electric vehicle using supercapacitors”, EVS'21, Monaco, April 2005.

EPF Lausanne, September 201427
«« EMR of an Electric Vehicle EMR of an Electric Vehicle »»
ich1
ubat
ifield
efield
battery choppers
(2.134)(2.135)
DC machine
(2.136)(2.135)(2.138)
ubat
Bat.itot
Env.
uch1
iarm
iarm
earm Tem
gear
Tgear
wh
Fwh
Fres
vev
vev
gearbox
(2.140)
mch1
ifield
uch2
ich2
ubat
(2.131)(2.132)
parallel connexion
(2.133)
wheel
(2.141) chassis
(2.144)
environment
(2.143)
mch2
ifield-ref
uch1-ref iarm-ref
Tem-ref Tgear-ref Fwh-ref vev-ref
uch2-ref
strategy driver request SoCest
wh-est vev-est
(3.21) (3.22) (3.23)
(3.24) (3.25)
(3.26) (3.27)
(3.28)
(3.29)
(3.30) (3.31) (3.32)
- EV with a field-winding DC machine -