-
8/13/2019 01 Overview of Ship Stability
1/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
NavalArchitecture&O
ceanEngine
ering
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
2009 Fall, Ship Stability
Ship Stability
2009 Fall
Prof. Kyu-Yeul Lee
Department of Naval Architecture and Ocean Engineering,Seoul
National University
Reference
Kyu-Yeul Lee,, Seoul National University, 2003.9
-
8/13/2019 01 Overview of Ship Stability
2/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
- Contents -Part.1-I Fundamentals of Ship Stability
Ch.1 Overview of Ship Stability
Ch.2 Physics for Ship Stability
Ch.3 Hydrostatic Pressure, Force and Moment on a Floating
BodyCh.4 Concept of Righting MomentCh.5 Hydrostatic Values
Part.1-II Righting MomentCh.6 Transverse Righting Moment
Ch.7 Longitudinal Righting MomentCh.8 Heeling Moment caused by
Fluid in Tanks
Part.1-III Stability CriteriaCh.9 Intact StabilityCh.10 Damage
Stability
Part.1-IV Pressure Integration Technique
Ch.11 Calculation of Static Equilibrium PositionCh.12 Governing
Equation of Force and Moment with Immersion, Heel and TrimCh.13
Partial Derivatives of Force and Moments with Immersion, Heel and
Trim
212
-
8/13/2019 01 Overview of Ship Stability
3/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
NavalArchitecture&O
ceanEngine
ering
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
2009 Fall, Ship Stability
- Ship Stability -
Part.1-I Fundamentals of Ship Stability
2009 Fall
Prof. Kyu-Yeul Lee
Department of Naval Architecture and Ocean Engineering,
Seoul National University
-
8/13/2019 01 Overview of Ship Stability
4/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
NavalArchitecture&O
ceanEngine
ering
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
2009 Fall, Ship Stability
- Ship Stability -
Ch.1 Overview of Ship Stability
2009 Fall
Prof. Kyu-Yeul Lee
Department of Naval Architecture and Ocean Engineering,
Seoul National University
-
8/13/2019 01 Overview of Ship Stability
5/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
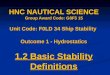
Change of Position of Ship 1. Immersion
Change of Position of Ship 1. Immersion
Immersion due to external force
d
G
B0
y
z
CL
Base
Line
G y
z
CL
Base
Line
- Overview of Ship Stability
G : Center of gravity
B : Center of buoyancy
F: Force
d: Immersion
y
z x
o
F
F
O
O x
B1
x
F
512
-
8/13/2019 01 Overview of Ship Stability
6/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
G
CL
y
z
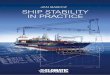
Change of Position of Ship 2. Heel
Heel due to external moment
B1
Change of Position of Ship 2. Heel
z
CL
Base
Line
yG
B0
- Overview of Ship Stability
B0
G : Center of gravity
B : Center of buoyancy
F: Force
: Heel Angle
y
z x
O Ox x
F
612
-
8/13/2019 01 Overview of Ship Stability
7/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
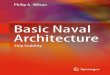
Change of Position of Ship 3. Trim
Trim due to external moment
Change of Position of Ship 3. Trim
x
z
Base
Line
G
B0 B1
G
B0
x
- Overview of Ship Stability
yz
xo
G : Center of gravity
B : Center of buoyancy
F: Force
: Trim Angle
y
z x
o
O y O y
712
-
8/13/2019 01 Overview of Ship Stability
8/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
Introduction to Ship Stability: Transverse Righting Moment of
Ship (1)
Righting Moment : Moment to
return the ship to the upright floating
position (Moment of statical stability)
O'x'y'z': Body fixed frame
Oxyz : Waterplane fixed frame
B0
K
G
O,O'
CL
y
z
Base
Line
FG
z
y
e y
z( )+
j
k
FB
B1
- Overview of Ship Stability
x,x'
812
-
8/13/2019 01 Overview of Ship Stability
9/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
Introduction to Ship Stability: Transverse Righting Moment of
Ship (2)
Z
K
z
y
z M
restoring
e
G
FG
BB1
N
FB
1By
Gy
O'x'y'z': Body fixed frame
Oxyz : Waterplane fixed frame
BGZ F= i Transverse Righting moment
1( )restoring G B By y F = + i
Righting arm
Righting Arm (GZ)
1G BGZ y y= +
From direct calculation
We should knowyG, yB1 in waterplane fixed frame
From geometrical figure withassumption that Mdoes not
changewithin small angle of heel (about 10)
sinGZ GM =
GM is related to below equation bygeometrical figure
GM KB BM KG= + - Overview of Ship Stability
y
z( )+
j
k
O,O'
x,x'
Righting Moment : Moment to
return the ship to the upright floating
position (Moment of statical stability)
912
-
8/13/2019 01 Overview of Ship Stability
10/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
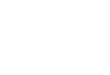
Introduction to Ship Stability: Stability Criteria IMO
Regulations for Intact Stability
100 30 4020 50 60 70 80
Angle of heel
()
Righting Arm
(GZ(m))
A B
(a) Area A 0.055 m-rad
Area A : Heel Angle from 0~ 30
Area B : Heel Angle from 30~ min(40,f )
f : An angle of heel at whichopenings in the hull
m : Angle of maximum righting arm
(c) Area B 0.030 m-rad
(d) GZ 0.20 m at an angle of heel equal to or greater than
30
(b) Area A + B 0.09 m-rad
(e) GZmax should occur at an angle of heel equal to or greater
than 25.
(f) The initial metacentric height GMo should not be less than
0.15 m.
(IMO Res.A-749(18) chapt.3.1)
m
After receiving approval of
calculation of IMO regulation from
Owner and Classification Society,
ship construction can proceed.- Overview of Ship Stability
= const
IMO Regulations for Intact Stability
( :displacement)
f
112
-
8/13/2019 01 Overview of Ship Stability
11/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation
Lab.http://asdal.snu.ac.krSeoulNationalUniv.
Righting Moment
Overview of Ship Stability
Force & Moment on a Floating BodyNewtons 2nd LawEuler
Equation
Stability Criteria
Damage Stability- MARPOL regulation
Pressure Integration Technique
Calculation Method to find GZwith respect to IMO regulation
sinGZ GM = ,GM KB BM KG= +
sinL LGZ GM = , L LGM KB BM KG= +
- Overview of Ship Stability
BF GZ
Transverse RightingMoment :
B LF GZ
Longitudinal RightingMoment :
GZ Calculation
( )G BGZ y y= +
( )L G B
GZ x x= +
Z
K
z
O
CL
y
z M
restoring
e
G
FG
BB1
N
FB
1By
Gy
FB: Buoyancy force
: Angle of Heel, : Angle of Trim
(xG,yG,zG) : Center of gravity in waterplane fixed
frame(xB,yB,zB) : Center of buoyancy in waterplane fixed frame
y'G, y'B in body fixed frame
Rotational Transformation!
yG, yB in waterplane fixed frame
Fundamental of Ship Stability
Properties which is related to hullform of the ship
Hydrostatic Values
Intact Stability- IMO Requirement (GZ)- Grain Stability-
Floodable Length
1112
P d F i Fl id P i l
Assumption
di l t f ti l ith t t ti
-
8/13/2019 01 Overview of Ship Stability
12/12
2009 Fall, Ship Stability
SDAL@Advanced Ship Design Automation Lab.SeoulNational2009 F ll
Shi S bili
-Pressure and Force acting on Fluid Particle-6 D.O.F Equations
of Ship Motions: Relations among Undergraduate Lectures
12/15112/131
6 D.O.F equations of motions
Shear force(S.F.) &
bending moment(B.M.)
Shear force(S.F.)
Integral
Bending moment(B.M.)
Coordinate system(Waterplane Fixed & Body-fixed frame)
Newtons 2nd Law
( ) ( , , )gravity Fluid = +F r F r r r
)()( ForceSurfaceForceBody +=
Calculation of
Fluid Force
Equations of motions
of Fluid Particles
Cauchy
equation
Navier-Stokes
equation
MEuler
equation
Bernoulli
equation
02
1 2=+++
zgP
t
Mass
Conservation
Law02 =
Laplace
Equation
LinearizationR
D
I
+
+
= (Incident wave potential)
(Diffraction potential)
(Radiation potential)
Shear stress Curl & Rotation
Lagrangian &
Eulerian Description
Enigneering Math.(2nd-year undergraduate)
( )=V
Velocity potential
1) RTT : Reynold Transport Theorem
2) SWBM : Still Water Bending Moment
3) VWBM : Vertical Wave Bendidng Moment
Assumption
FF.K: Froude- krylov force
FD: Diffraction force
FR: Radiation force
Gravityz faxm ,)(
BS dSPnt
gzP
=
( , , )Fluid =F r r r .( ) ( ) ( ) ( , , )Buoyancy F K D R= + +
+F r F r F r F r r r
Microscopic/
Macroscopic Derivation(RTT1))
= 0
2
1 2
(az : Acceleration of
z directionby heave& pitch motion)
Newtons 2nd Law(Body force
Surface force)
m = =
+
r Fm
Staticz
zDKF
fvb
aaff
,
,,,
33
33..
Ship Hydrodynamics, Dynamics(2nd-year undergraduate)
.
, ,
( ) ( ) ( )
( , ) ( , )
gravity Buoyancy F K D
R Damping R Mass
= + + +
+ +
F F r F r F r
F r r F r r
Non-linear terms Non-linear equation
Difficulty of getting analytic solution
Numerical Method Computer aided ship design(3rd-year
undergraduate)
Newtonian fluid*
invicid fluid
Stokes Assumption**
Irrotational flow
Incompressible flow
[ ]1 2 3 4 5 6, , , , , T
=r
1
2
3
:
:
:
surge
sway
heave
4
5
6
, :
, :
, :
roll
pitch
yaw
y
z
( : wetted surface)BS
1x ..FS..MB
x
z
= Mr F
Ship Structural Design system(3rd -year undergraduate)
Fundamental of maritimeStructural statics(2nd -year
undergraduate)
Behavior of ship and its control(3rd -year undergraduate)
Dynamics (2nd -year undergraduate)
Planning procedure ofnaval architecture and
ocean engineering(2nd-year undergraduate)
Ocean environment
Information system(3rd -year undergraduate)
2
2
: displacement of particle with respect to time
,d d
dt dt = =
r
r rV a
12