Embed Size (px)
Citation preview
10.08.2009
1
Location Based Services – LocationProviderProvider
Thomas [email protected]
Übersicht
2

10.08.2009
2
Example An example – cell phone with GPS
3
Example GMDSS Global Maritime Distress and Safety System (GMDSS)

10.08.2009
3
5
Basics How to determine a position with compass and
landmarks?
Triangulation Determine a position by measuring two angles Cross bearing
Trilateration Determine a position by measuring two distances
6
Determine a position by measuring two distances

10.08.2009
4
Triangulation
150 degrees
250 degreesFix point
7
150 degrees
Bearing point
Bearing point
Triangulation Fix point is situated at the crossing of two lines with
known direction G t f li ( l b t li ) ff t ibl Geometry of lines (angle between lines) affects possible
precission (90 degrees would be best)

10.08.2009
5
TrilaterationBearing point
2000
1000m
1000m
Fix point
2000m
1000m
Bearing point
Bearing point
Trilateration Signal strength or derived indicators Known signal attenuation per distance
Signal travelling time Known speed of signal (speed of light in most cases)

10.08.2009
6
Signal attenuation Calculating the expected signal strength (vacuum, free
field, Friis)
Signal travelling times Need to know time difference (latency) between sender
and receiver Cl k i t itt d i Clocks in transmitter and receiver Signal travels about 1.7E-7s for 50 metres 2m precission requires approx. 150MHz clock (or 75MHz if
round trip time is measured)
How to synchronize those clocks?

10.08.2009
7
Problem: two way propagation
Fast and Slow Fading
Green: Fast Fading Red: Slow Fading 40 dB means a factor of 10000

10.08.2009
8
GPS System
GPS Space vehicles More than 20 satellites in orbit Weight 1000 – 2000 kg S d 10200k h Speed 10200km per hour TX power 20 – 50W
Input Correction data
Output Output L1 channel: C/A Code (Coarse Acquisition) – civil use L2 channel: P-Code (Precise) – military / special licensees only

10.08.2009
9
Satellite constellation At least 24 satellites permanently in orbit (typically at
least one spare per plane) Fli ht ltit d 20000k Flight altitude approx. 20000km 2 orbits per day 6 orbital planes 55° Inclination 60° between planes 4 satellites per plane 4 satellites per plane
At least 4 satellites are above the horizon Satellite constellation has to be distributed to the
receiver
Almanac and ephemeris Almanac data Almanac contains parameters describing the general system
health and rough orbits of the entire satellite fleethealth and rough orbits of the entire satellite fleet
Ephemeris data Precise orbital information about position of particular space
vehicle
Download speed is about 75 bits per second (approx. 30s for ephemeris and 12min for almanac)
Parameter description can be found athttp://www.navcen.uscg.gov/gps/almanacs.htmhttp://www.ngs.noaa.gov/orbits/

10.08.2009
10
Example********Week 272 almanac for PRN-01********ID: 01Health: 000Eccentricity: 0.5485057831E-002Time of Applicability(s): 61440.0000Orbital Inclination(rad): 0.9817560932Rate of Right Ascen(r/s): -0.7783181344E-008SQRT(A) (m 1/2): 5152.596191Right Ascen at Week(rad): 0.1478141790E-001Argument of Perigee(rad): -1.698520076g g ( )Mean Anom(rad): -0.8001380110E+000Af0(s): 0.3719329834E-003Af1(s/s): 0.3637978807E-011week: 272
Example********Week 272 almanac for PRN-01********ID: 01Health: 000
ID of satellite
Eccentricity: 0.5485057831E-002Time of Applicability(s): 61440.0000Orbital Inclination(rad): 0.9817560932Rate of Right Ascen(r/s): -0.7783181344E-008SQRT(A) (m 1/2): 5152.596191Right Ascen at Week(rad): 0.1478141790E-001
„health“ status
Diverse BahnparameterDiverse BahnparameterOrbit parameters
Argument of Perigee(rad): -1.698520076Mean Anom(rad): -0.8001380110E+000Af0(s): 0.3719329834E-003Af1(s/s): 0.3637978807E-011week: 272
Clock error and drift

10.08.2009
11
Ephemeris13200.54850578308105E-0002 0.12502670288086E-0001 -0.24774635676295E-00080 51525961914063E+0004 0 47050714492798E 0002 0 54065573215485E+00000.51525961914063E+0004 0.47050714492798E-0002 -0.54065573215485E+0000-0.25469183921814E+0000 0.37193298339844E-0003 0.36379788070917E-001109
RPNSVNURAEccentricity Inclination Offset Rate of Right AscensionSquare Root of Semi- Longitude of Orbital Argument of PerigeeSquare Root of Semi Longitude of Orbital Argument of PerigeeMajor Axis PlaneMean Anomaly Zeroth Order Clock First Order Clock
Correction CorrectionSatellite HealthSatellite Configuration
SV
Air Force Ground Control
ControlStation
User
Corrections
(x,y,z,t)i(x,y,z,t)i
+ Corrections
SVi
Master Control Station at Schriever AFB, Colorade Springs

10.08.2009
12
Ground control Flight paths of the satellites are tracked by US Air Force
monitoring stations in Hawaii, Kwajalein, Ascension Island, Diego Garcia, and Colorado Springs, Colorado, along with monitor stations operated by the National Geospatial-monitor stations operated by the National Geospatial-Intelligence Agency (NGA).
The tracking information is sent to the Air Force Space Command's master control station (MCS) at Schriever Air Force Base in Colorado Springs
Then MCS contacts each GPS satellite regularly with a navigational update.
These updates synchronize the atomic clocks on board the
23
These updates synchronize the atomic clocks on board the satellites to within a few nanoseconds of each other, and adjust the ephemeris of each satellite's internal orbital model.
During space maneuvers the space vehicle is marked unhealthy.
SV Data Structure
Data frame:1500 bits, 30 sec
1 2 3 4 5
1
2
Subframe:300 bits, 6 sec
Clock corrections
.
.
.25
Precise (ephemeris)orbital position data SV system data
Completenavigationmessage:25 frames,12.5 min
50Hz binary data sent in 300-bit packets (subframes) 5 subframes per frame, 25 frames per message Message restarts every 12.5 min Data is encrypted and modulated before transmission Each subframe contains parity bits for data corrections
25

10.08.2009
13
SV Data Transmission
SPS Carrier freq.(uniform)
Pseudo-Random Noise (PRN)
Data @ 50Hz
PPS Carrier freq.(uniform)
SV data (position, time, system info, etc.) logical OR’d with PRN code, then used to modulate high-freq. carrier
PRN codes are unique signatures for each SV, one C/A and one P-code for each L1 = SPS signal (civil use), repeats every 1023 cycles L2 = PPS signal (military and special use only), repeats every seven days
Calculation of time difference Correlation along time axis
Actual PRN received from SV
Replica of SV PRN from receiver almanac
Quelle: Joe Frankel

10.08.2009
14
Doppler shift
Correlationoutput(normalized)
Frequency Offset (kHz) Code Delay (chips)
Distance measuring
TX: 0 00 s
RX: 0,06 s
TX: 0.00 s

10.08.2009
15
Calculating Position The receiver position is calculated
by solving a set of four Pythagorean equations:
(x1 - X)² + (y1 -Y)² + (z1 - Z)² = c²(t1 - T-d1)² (x2 - X)² + (y2 -Y)² + (z2 - Z)² = c²(t2 - T-d2)² (x3 - X)² + (y3 -Y)² + (z3 - Z)² = c²(t3 - T-d3)² (x3 - X)² + (y3 -Y)² + (z4 - Z)² = c²(t4 - T-d4)²
Where: X,Y,Z and T are unknown position and
time at receiver (x,y,z)i are the four known satellite
positions di are the known differences in data
arrival time, from correction dataReceiver determines best solution
Satellite Position One satellite

10.08.2009
16
Satellite Position Two satellites
Satellite Position 3 satellites

10.08.2009
17
Satellite Position• 4 satellites
Satellite Position Plausibility Near the surface O i t One point

10.08.2009
18
Satellite Position
Error SourcesSOURCE ERROR CONTRIBUTION
Ionospheric delays 10 m
Tropospheric delays 1 m
PRN Code Noise 1 m
SV Clock 1 m
SV Ephemeris Data 1 m
Pseudo-Range Noise 1 m
Receiver Noise 1 m
Multi-Path 0.5 m
TYPICAL ERROR WITH BASIC GPS 15 m
Note: Selective Availabilty (SA) limited accuracy of SPS service to 100m until May 2000
10.08.2009
19
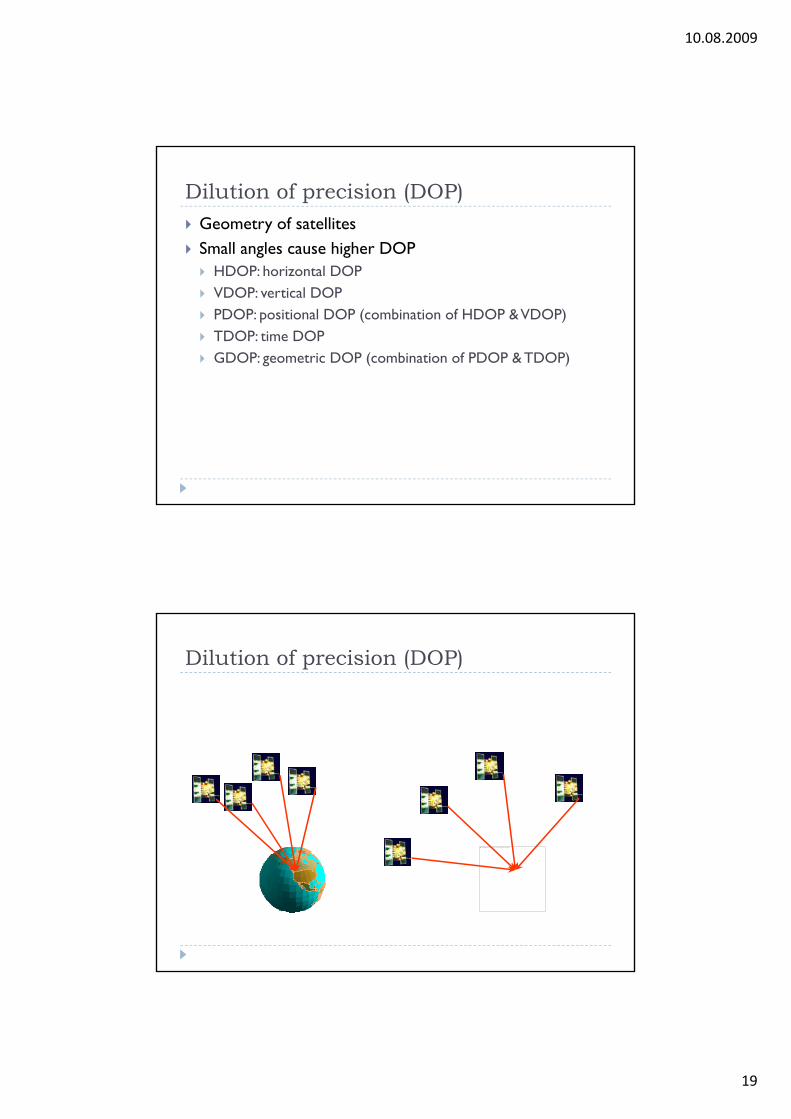
Dilution of precision (DOP) Geometry of satellites Small angles cause higher DOP
HDOP h l DOP HDOP: horizontal DOP VDOP: vertical DOP PDOP: positional DOP (combination of HDOP & VDOP) TDOP: time DOP GDOP: geometric DOP (combination of PDOP & TDOP)
Dilution of precision (DOP)
Das Bildelement mit der Beziehungs-ID rId4 wurde in der Datei nicht gefunden.

10.08.2009
20
Signal strength Outdoor only Not under water Morphologic obstacles (Caves, narrow valleys) Human body
Precise timing Very good clocks needed 1/1000s delay 300,000m distance Space vehicles contain atomic clocks (Cs or Rb) Receiver contains cheap clocks

10.08.2009
21
Atomic clocks within the space vehiclesA. BLOCK I : NONE B. BLOCK II: PRNS 1, 3, 4, 5, 6, 7, 8, 9, 10, 11, 13, 14, 15, 16
PLANE : SLOT F6, C2, D4, B4, C1, C4, A3, A1, E3, D2, F3, F1, D5, B1CLOCK : CS, CS, RB, CS, RB, RB, CS, CS, CS, RB, RB, RB, CS, RBBLOCK II PRNS 17 18 19 20 21 22 23 24 25 26 27 28 29 30BLOCK II: PRNS 17, 18, 19, 20, 21, 22, 23, 24, 25, 26, 27, 28, 29, 30PLANE : SLOT D6, E4, C3, E1, D3, E2, F4, D1, A2, F2, A4, B3, F5, B2CLOCK : RB, RB, RB, RB, RB, RB, RB, CS, CS, RB, RB, RB, RB, RBBLOCK II: PRNS 31PLANE : SLOT C5CLOCK : RB
Af0(s): 0 3719329834E-003Af0(s): 0.3719329834E 003Af1(s/s): 0.3637978807E-011
Af0 – Clock ErrorAf1 - Drift
Timing – example First estimation of receiver time
Clock is ahead of time

10.08.2009
22
Timing Clock is behind time
Timing Calibration to generate minimum time difference

10.08.2009
23
Indoor GPS Attenuated reception Approx. 10 – 20dB per floor level
Correlation (lock) very hard Correlation (lock) very hard Doppler-Shift and Code Delay „Integration“ of energy needs more time
Correlation

10.08.2009
24
Assisted GPS Almanac will be distributed by other means such as the
Internet N l ti ti d d t 10% (h i Necessary correlation time reduced to 10% (hence, gain
by A-GPS is 10dB)
A-GPS

10.08.2009
25
Chips Correlator GL16000 from GlobalLocate 8x8mm B fit f tl f ARM7 Bus fits perfectly for ARM7
GPS RF Tuner GL-HSRF 3,5x4,5mm Fits to the GL16000
Pseudolites

10.08.2009
26
Selected Availability
Principle of D-GPS Reference station receives GPS signals and calculates
position Di t diff b t k d l l t d Distance or difference between known and calculated
position (pseudorange) PRM(t) is being determined Difference will be distributed as Pseudorange correction
PRC(t) and Rate Correction RRC(t) GPS receiver calculates position as
PR(t) = PRM(t) + PRC(t)PR(t) PRM(t) PRC(t)

10.08.2009
27
LAAS Local Area Augmentation System (LAAS) Information is locally collected an transmitted locally
A Airports Ports Shores
LAAS

10.08.2009
28
LAAS examples
Perry
CCV3
MCD1
MOB1
Tallahassee Jacksonville
TampaMelbourne
ProposedCCAFS/KSC Micro-Net
KYW1
MAI1Miami
Key West
EXISTING USCG DGPS SITE
POTENTIAL FDOT DGPS SITE
FDOT DGPS SITE at NOAA/NWS WFO
0 50 100 km
LAAS

10.08.2009
29
D-GPS via satellites Wide Area Augmentation System (WAAS) distributes
correction signal via geostationary satellites (Inmarsat) on same frequencies as GPS SV (free PRNs)same frequencies as GPS SV (free PRNs)
EGNOS European Geostationary Navigation Overlay System (compatible to WAAS)
Cellular location providers Usually LBS need a mobile network anyway GSM
HSCSD GPRS EDGE
UMTS HSDPA HSDPU
WLAN / Bluetooth / UWB
58
Utilization of those networks for position determination is obvious

10.08.2009
30
GSM (HSCSD, EDGE, GPRS) Cell structure
GSM (HSCSD, EDGE, GPRS) Sectors

10.08.2009
31
GSM (HSCSD, EDGE, GPRS) Umbrella Cells
GSM (HSCSD, EDGE, GPRS)

10.08.2009
32
GSM (HSCSD, EDGE, GPRS)
GSM (HSCSD, EDGE, GPRS) Cell Global Identity Uses Measurement Reports

10.08.2009
33
GSM (HSCSD, EDGE, GPRS) Observed Time Difference of Arrival
GSM Spectrum GSM900 (Europa, Asien) 880 - 915 MHz (uplink) und 925 - 960 MHz (downlink)
GSM1800 (E A i ) GSM1800 (Europa, Asien) 1710 - 1785 MHz und 1805 - 1880 MHz
GSM1900 (USA) 1850 - 1910 MHz und 1930 - 1990 MHz
GSM400 und GSM 850 are also possible

10.08.2009
34
GSM (HSCSD, EDGE, GPRS) LBS in GSM
Positioning in WLANs Without additional hardware Signal strength / signal precense Si l l t Signal latency Plausibility
Structure of the building
Position of APs could be known

10.08.2009
35
Triangulation Latency Speed of light / sound is known
Si l h Signal strength Attenuation is known
Latency Precise clocks needed in AP or mobile client 150 MHz are needed for 2m accuracy (or 75 MHz when RTT
is being considered)is being considered)

10.08.2009
36
Signal strength (geometric approach) Friis Formula
Two Ray model

10.08.2009
37
Fast and Slow Fading
Signal strength (Bayesian approach) Calculation of position with maximum likelihood
according to earlier test measurements
Radio map / propagation modelS l h f f Signal strength is a function of position
Position determination is an inverse problem

10.08.2009
38
Principle Calculation of propagation model, test measurements
within a raster, additional calculations of obstaclespossiblepossible
Ausbreitungsmodell

10.08.2009
39
Commercial system
Location providersWLAN RFID A-GPS GSM
Accuracy 1 m 50 cm-2 meters 1)
15-50 m 50 m
Continuous tracking Yes No Yes YesContinuous tracking Yes No Yes Yes
Proprietary hardware No Reader/tag New mobile phones No
Resource requirements Low Low High Low
Availability WLAN Readers required Indoor & urban Everywhere
Calibration Yes No No No
Penetration All WLAN Low, requires readers
Mobile users Mobile users
Cost Low Low (USD 10- High Low(1000)
g
Roll out time Fast Fast Slow Fast
Frequencies 2,4 GHz 50 kHz-2.5 GHz
800, 1900, 1575 MHz
800, 1900 MHz

10.08.2009
40
Proximity sensors Position determination according to which transmitters
are in range For instance Bluetooth WLAN RFID radio stations For instance Bluetooth, WLAN, RFID, radio stations Database contains position of transmitters
79
Loran-C (Long Range Navigation) Developed shortly after WWII Position determined by measuring phase shifts between at
l t th t tileast three stations

10.08.2009
41
Chain configurations in NELS
GRI 6731, Lessay Chain
Designator Station name Latitude Longitude ED Power Blanking Nominal ECD
M Lessay, France 49º 08' 55.224'' N 01º 30' 17.029'' W 0 250 Priority 6731 0
X Soustons, France 43º 44' 23.099'' N 01º 22' 49.584'' W 13000 250 Not dual rated 0
Y Loophead, Ireland 52º 35' 01.576'' N¹ 09º 49' 07.969'' W¹ 27300 250 Priority 9007 +0,5
Z Sylt, Germany 54º 48' 29.975'' N 08º 17' 36.856'' E 42100 250 Priority 7499 +0,5
GRI 7001, Bø Chain
Designator Station name Latitude Longitude ED Power Blanking Nominal ECD
M Bø, Norway 68º 38' 06.216'' N 14º 27' 47.350'' E 0 400 Priority 9007 0
X Jan Mayen, Norway 70º 54' 51.478'' N 08º 43' 56.525'' W 14100 250 Priority 9007 0
Y Berlevåg, Norway 70º 50' 43.014'' N 29º 12' 15.980'' E 29100 250 Not dual rated 0
GRI 7499, Sylt Chain
Designator Station name Latitude Longitude ED Power Blanking Nominal ECD
M Sylt, Germany 54º 48' 29.975'' N 08º 17' 36.856'' E 0 250 Priority 7499 +0,5
X Lessay France 49º 08' 55 224'' N 01º 30' 17 029'' W 14100 250 Priority 6731 0X Lessay, France 49 08 55.224 N 01 30 17.029 W 14100 250 Priority 6731 0
Y Værlandet, Norway 61º 17' 49.435'' N 04º 41' 46.618'' E 29500 250 Priority 7499 0
GRI 9007, Ejde Chain
Designator Station name Latitude Longitude ED Power Blanking Nominal ECD
M Ejde, Faroe Islands 62º 17' 59.837' N 07º 04' 26.079'' W 0 400 Not dual rated 0
W Jan Mayen, Norway 70º 54' 51.478'' N 08º 43' 56.525'' W 14200 250 Priority 9007 0
X Bø, Norway 68º 38' 06.216'' N 14º 27' 47.350'' E 28000 400 Priority 9007 0
Y Værlandet, Norway 61º 17' 49.435'' N 04º 41' 46.618'' E 41100 250 Priority 7499 0
Z Loophead, Ireland 52º 35' 01.576'' N¹ 09º 49' 07.969'' W¹ 55700 250 Priority 9007 +0,5
Loran

10.08.2009
42
Loran
Eine Loran-C Chain

10.08.2009
43
Coverage
Landmarks Recognition of landmarks Artifical marks
Strips on the street Strips on the street Skyline
Light houses
RFID tags
Natural Valleys
Rivers Rivers

10.08.2009
44
Where are we?
Examples

10.08.2009
45
VOR (VHF Omni Range)
Tire sensors
Quelle: Renate Czommer

10.08.2009
46
Tire sensors
Quelle: Renate Czommer
DOP DOP over time

10.08.2009
47
Sensor fusion
RFID

10.08.2009
48
RFID Passive Tags

10.08.2009
49
RFID Active Tag (Backscatter)
RFID Miniatures
American banknotes bear the motto "In God we trust".
The National Security Agency added:"All Others, we monitor".
Quelle:The EconomistQuelle:The Economist