Embed Size (px)
Citation preview

Man Drone: A Dream Come Through
A guide on how to design a man carrier drone
The PLAN B Option
First draft
By Winfried Rijssenbeek, the Humming Man Project Team
Date November 2014

Contents
Introduction ............................................................................................................................................. 3
Configuration ........................................................................................................................................... 3
Hovering and Max power ........................................................................................................................ 4
Weight of craft ........................................................................................................................................ 4
The components of the craft ................................................................................................................... 4
Propellers ............................................................................................................................................ 5
Electric brushless motors .................................................................................................................... 5
Electronic speed control (ESC) ............................................................................................................ 6
Cables .................................................................................................................................................. 6
Belt drive reduction ............................................................................................................................. 6
Batteries .............................................................................................................................................. 7
Air frame .............................................................................................................................................. 8
Flight Control System .......................................................................................................................... 8
The design configuration ......................................................................................................................... 8
Prop and motor matching ....................................................................................................................... 9
Airframe design ..................................................................................................................................... 10
Battery design........................................................................................................................................ 11
Costs of system components ................................................................................................................ 12
The Making and testing of the craft ...................................................................................................... 13
Notes ..................................................................................................................................................... 13
Flight control ................................................................................................................................. 14

Introduction
This document is about the design development of a man carrier drone. It sketches considerations on
how it could be configured, how it can be made. It is a contribution to an open source knowledge
development and can be used by other teams to make their unique choices. Herewith we as a team
and particular my self would like to thank all that have shared their knowledge by explanation on
skype, by youtube movies, by what’sapp, etc… Also interesting to see that knowledge came from all
around the world: from USA to China, from India to Norway to Uganda. All in all quite a variety of
backgrounds and cultural differences.
Again thanks to the team and its supporters, Winfried Rijssenbeek, coordinator of The
HummingManProject, aiming to make a man carrier drone.
Part of my internal fun is to make shapes of beauty, I did that already as a 6 year old. Making
drawings of future cars. Another part of me is analytical: I love spreadsheets, phyisics and aero
dynamics. This project has it all!
Configuration The making of a drone or multicopter that can lift a 80 kg is quite a challenge. It can be a wide craft
or a compact one. Or in between. Soon we realized that more compact results in lower efficiency and
hence higher energy needs to have the craft run. With a large craft we can have good efficiency low
energy requirements. Why is that so? It is related with the air stream or mass displacement of air.
Simply a craft that replaces air only in a rotor surface of e.g. 5 m2 has to push air mass trough that at
high velocity, so to compensate for the gravity force. Eg a craft weighing 150 kg with one rotor of 3 m
needs an average speed of 18 m/s.
Now if we take a HPV Sikorsky prize craft with
4 rotors of 12 m, we would need for the same
weight
To speed up the air you need a lot of energy: it
goes by the speed to the 3 power and by the
surface. Finally a extra bonus is larger size
props are more efficient due to viscosity
effects. So the result is that the compact craft
needs e.g. 36 kW for hovering whereas the
HPV one only an estimated .8 kW
So we had to question our selves what is the
good size? Well we decided that a good size is
the size that is compact can be trailered and
really makes a this craft a 2.5 m by 3.75
meter. It can also be foldable. This will
indeed result in losses in efficiency and high
power requirements. We would think that
this compactness is the unique feature of our
Parameter Unit Value
Air mass density Rho kg/m3 1.25
No of rotors no 1
Diameter of rotor D m 3
Surface of rotor area A m2 7.068583
Weight of craft G kg 150
G N 1471.5
G = .5 *V^2*A* Rho
Air mass speed at rotor diameter
m/s 18.3
km/hr 65.7
Parameter Unit Value
Air mass density Rho kg/m3 1.25
No of rotors no 4
Diameter of rotor D m 12
Surface of rotor area A m2 452.3893
Weight of craft G kg 150
G N 1471.5
G = .5 *V^2*A* Rho
Air mass speed at rotor diameter
m/s 2.3
km/hr 8.2
craft which can just hover and speed up like a humming bird.
Having decided that the craft needs to be compact, which indeed goes at the detriment of efficiency,
we now have to proceed with the design configuration.
Hovering and Max power We plan to have the craft be used at hovering most of the time. But for the hovering we need also
the balancing so to give extra power instantly. Also for wind (forward or down wind) we have to have
some extra power. Finally we have to have extra power in case of failure of the system.
One engine craft either with 2 rotors is simply the most risk. If the engine or motor fails: end of
story. For ordinary planes that have a gliding mode it is 3 engines or 2 at least. For Helicopters it is
one, extremely risky, but this is compensated somewhat by the fact that it can change its blades so to
gain blade speed when falling and this speed converted into rotor energy can be used to lift the heli
at the end. A good understanding is given in http://vimeo.com/34974924. This auto rotation is not
ideal at low altitudes where the heli cannot gain rotor energy.
Now in the configuration of a more rectangular surface of lift of our craft, we can use 3, 4 or 6 or
more rotors. It would be best to use a lower number of bigger rotors as this relates with the
efficiency. 6 rotors would be ideal for making the rectangular surface and in case of fall out, one still
can manage. It the case of 3 and 4 rotors, there is a unrecoverable balance. So we can start with 6
rotors or more and determine the parameters.
Weight of craft It is important to count with a ultra light craft as the payload is 80 kg. We consider a 150 kg as total a
good max. The reason also being that a craft of more than 150 falls into another category as the so
called utralight airplane. We therefor need to have extremely low weight but safe components in
order to keep weight down so to add to the battery volume that in fact determines the flight
duration.
The components of the craft
We can look at the different components:
• Propellers
• E motor
• Electronic speed control (ESC)
• Cables
• Belt reductors
• Batteries
• Air frame
• Flight Control System

Propellers Propellers depending on size between 0. 340 (32 inch diameter) and 1.1 kg (51 inch diameter). There
is a huge number of props available in the market from standard to special design, etc.. Materials
today are either wood or carbon fibre. Alum or other are not used in the Ultra light propulsion.
Here are just a few:
Xoar http://www.xoarintl.com/rc-propellers/gas-props/PJD-Sport-Prop-Type-A-Laminated-Propeller/#des
Bambula http://www.bambula.cz/
ZDZ http://www.mejzlik.eu/extra-light/
Menz prop http://www.big-planes.de/profil/jc-super-prop/index.php
JC prop http://www.big-planes.de/profil/jc-super-prop/index.php
CFK prop http://www.big-planes.de/profil/jc-super-prop/index.php
Vess http://www.vesspropellers.com/servlet/StoreFront
Seidel http://www.seidel-props.de/index.php?option=com_content&task=view&id=26&Itemid=57
APC http://www.apcprop.com/v/index.html
TCF http://www.hobbyking.com/hobbyking/store/__11967__tcf_27x10_highprecision_carbon_fiber_sport_propeller.html
Different brands http://www.amr-rc.com/products-brand/engines-accessories/propellers/bambula/
Falcon Hobby http://falconhobby.en.alibaba.com/product/811711058-218365617/Gas_beech_wood_propellers.html
PT-Models http://www.troybuiltmodels.com/items/PT3210.html
Biela http://www.troybuiltmodels.com/items/BP3616-3.html
HELIX http://www.helix-propeller.de/aircraft/7_2_propellerblaetter.php
Electric brushless motors We need to have electric brushless motors for the craft. The reason is simple: these brushless PM
motors are extremely powerful for their weight, they are reliable and have no wear except for the
bearings. There are quite some producers of these brushless motors especially in Germany, Czech
Republic and China. The ones interesting for the project are lighter than 5 kg and with high power
per kg ratio’s from 4 to 8 kW/kg. There are considerable differences in quality and price. We show an
overview below: A Turneigy Rotomax
150
B Rotexelectric RET 30 5
C Nt -power Motor 12 kW
D Hacker QST150-45-6 50V
E Hacker A200 8
F Plettenberg Nova 15
G Plettenberg Nova 30
Parameter Unit A B C D E F G
Power kW 8.00 15.00 12.00 8.78 8.82 13.00 25
Speed rpm 8000 2500 3000 2330 5390 4900 3300
Costs euro/unit 340 1200 1200 1700 1050 1700 2500
Voltage V 55 63 60 50 49 80 120
Amps A 145 238 250 175.5 180 163 208
Efficiency % 90% 90% 90% 90% 90% 90% 90%
Weight kg 2.52 4.1 4.1 3.3 2.5 2.5 5
Ratio Euro/kW 43 80 100 194 119 131 100

Ratio rev/kW 1000 167 250 266 611 377 132
Ratio Euro/kg 134.92 292.68 292.68 515.15 420.00 680.00 500.00
It can be concluded that in value for money A is a clear winner, with B Ret 30 5 a second best. Likely
in terms of kg and low speed the B and C are good alternatives. Thus we opt for the A.
Electronic speed control (ESC) The ESC is a device that basically converts the DC battery power into a three phase alternating
current that drives the motor: it does so by making a running magnetic field in the stator coils that is
pushing the magnets at the outside rotor of the Brushless E motor. The ESC’s to be used are OPTO
and they come with different DC voltage input levels. There is quite a choice in these ranging from
100 to 300 Amps. It is good to understand that with higher power in general te Amps increase too. In
such cases the Amps through the coils might create quite some losses and a higher voltage might be
best opted for. In the range of this craft depending on the numbers of motors we would suggest 55 V
minimum (many small motors) and max 120 with eg 4 large motors.
There are ESC’s for the RC community and industrial ones and more. The ESC’s are in different ranges
from 50 to 300 Amp and normally a brushless motor is given a combination with a ESC. Eg the
rotomax 150 is paired with the Fat Boy ESC of Turnigy Hobbyking.
Cables All the current from the battery passes through the ESC and there goes into the motor. The amps
passing through the cables require a thick cable if not the losses can be considerable. Again this
would tend to take higher voltages if this can be opted for. Cables are best alum. The reason simply
that although alum has a 56% lower conductivity it has a much lower weight too (2.7 iso 8.9 kg/l) so
it is wise to use alum conductors of bigger size (1.33 The copper wire diameter)! Wirelength should
be low: max 2 meters. Positioning of the ESC is best closest to the e motors. For the cables with a 2
meter length we aim losses less than 3 %. So with a 10 AWG copper conductor (5.6 mm2) and 2.5 m
we have such result with 55 V and 100 Amp. (http://www.calculator.net/voltage-drop-
calculator.html?material=copper&wiresize=3.277&voltage=55&phase=dc&noofconductor=2&distanc
e=2.5&distanceunit=meters&eres=100&x=46&y=15)
Belt drive reduction Depending on the size of the propellers and the speed of the motor it can be effective l to introduce
a reduction of the speed of the motor. The propeller can then be working at a better efficiency.
With high speed motors such as the rotomax 150 that have relatively low power output, a reduction
of the speed can give a better match between the propeller and the motor. This requires some
explanation. If we have a 150 kg to be lifted by 6 rotors we need 25 kg of lift per rotor and a max of
50 kg to cover for redundancy, balance, wind, etc.. So we need to match propeller and motor to the
best efficiency aiming for the motor not to exceed 10 kW. This can be done using software or
formulas to calculate trust of propellers based on their rotational speed.
The calculation program for this is eg http://adamone.rchomepage.com/calc_thrust.htm. If you fill in
the dimensions of the propellers, and the rotational speed you find the static trust of the prop and
the mechanical energy required for this. This energy is always to be below the e-motor output with

the same speed. If energy required of the prop at a certain no of revs is below that of the motor it
can function over that range, but when the speed of the prop and required energy exceeds the
energy produced b the motor, the prop cannot speed up further. This is seen in the below graph.
A disadvantage of a belt redactor is the weight enhancement in the belt drive itself but also due to
the more weight prop. Another uncertainty is if the prop behavior is sufficiently agile to respond to
the balancing power requirements. And possible vibrations. For calculation programs, Gates
(http://engapps.gates.com/IQInstallService/Install/DF-Pro%20Install%20311.exe)
For this craft however we intend to use direct drive system with 12 rotors in 6 contra rotating modes:
each prop is to be attached to a single e-motor, but in a contra rotating direction.
Batteries This is the essential component of the craft: it is the energy source that must be able to provide the
draw of Amperes to the motor as well as the required flight time. Flight duration is the major issue
we have. We want to have at least 10 min of flight duration, which means with a 4.5 kW for 25 kg
trust per motor and 6 motors we have 4.5 * 6= 27 kW or if we have 12 motors with 1.9 kW reach to
produce 12.5 kg of trust we need 1.9 * 12 = 23 kW. If we have an motor efficiency of 90 % we thus
need 30 to 25 kWh of one hour for both options respectively or if 10 min flight we are requiring a
4.2 to 5 kWh battery capacity at minimum.
Appart from the capacity requirement we also might have an issue with the large power draw.
Batteries have limits on the amperes you want to draw out of them: Fortunately Lipo batteries are
quite exceptional in this respect: they can release a lot of energy in a short time. However we will
have to calculate this aspect.
Finally the batteries need to supply a required voltage and the Lipo batteries that are best in both
energy and power density (Wh/kg and W/kg) have 3.7 volts per cell. They work with S numbers: 4S
Lipo thus means 4 * 3.7 = 14.8 V and of course when discharged this voltage drops slightly.
0
5000
10000
15000
0 500 1000 1500 2000 2500 3000
En
erg
y i
n W
att
Prop rev's
Matching prop and e-motor
Mechanical Energy E-motor
Mech energy required by prop

Finally a last aspect is the combination of batteries and location. Batteries when discharged can
produce heat and this heat needs to be released.
Air frame Max weight aimed at is 5 kg. The airframe is to be strong and rigid. It should be able to withstand at
least 3 G. It can be made of alum 6061 tubes (e.g. 1.5 Inch and 1.2 mm wall), or from carbon fiber
tubes of different sizes. It would be interesting to have curved shapes, but this requires more
techniques and might make certification of the tubes/craft difficult as the bending might reduce
material strength.
Flight Control System There are many different flight control systems today. Some are openly developed like the one of 3 D
robotics and some are more in the RC world and others in the professional /military area. We need a
system that has the capabilities of smooth balancing power of the craft, flight track programming and
GPS correction. Appart from this we need a redundancy factor: of 3 parallel systems when one fails
the system should continue etc.. Now at this moment in time for the trials we do not have an issue,
but we do have an issue once this sort of crafts can become commercially viable.
As concerns redundancy, we plan to have a multiple sensor navigation sensor redundancy concept
(NAVKA-concept) in terms of:
- 3 x (GNSS, Gyro, Accelerometer, Barometer, Magnetometer) and a
- Robust, redundancy-based, concept for the estimation of the control parameters.
The design configuration As a point of departure we take a direct drive of the propellers for plan B. We would prefer to use
the e-motor that is best in terms of power and costs. This is the rotomax 150 cc. We will work with
this motor.
However it is important to make best efficiency on this option to have a good flight duration (10 to
12 min). For this the think that 6 pods are required. If we take the 150 cc rotomax we cannot use this
with 6 units as it requires too much power. Each motor would then need to produce 50 kg of trust
and this is not possible with such motors (required 20 kW). We need to have more that 6 units, so 8
or 10 or 12. We again can do the exercise with more motors: e.g. 10 motors requiring 30 kg trust
per motor. This will require ca 7 kW/unit, which can be done. But better is even 12 so that a
completely balanced system is made. This is important for the balancing control as well.
On each pod we can mount 2 brushless electric motors, in a contra rotation mode. Therefore we
have 12 e-motors requiring 25 kg of trust per unit. Looking at this graph below of a prop 32 x 12 we
see the below. Using the Adamone software (www.adamone.rchomepage.com/calc_thrust.htm)
with corrections based on similar props, trust and energy are given below.

Rev per min Rev/min 2000 2500 3000 3250 3500 4000 4500 5000 5100
Power required by prop (Kp)
Watt 0.69
428 839 1455 1853 2318 3470 4953 6808 7228
Trust delivered (Kt) Gr trust 1.1 4477 7153 10491 12411 14501 19195 24581 30668 31970
We can see that 25 kg of trust per motor, needs 4.9 kW. For hovering we need 12.5 kg and the mech
power for the prop is 1.9 kW. Of course it is 12 of such e motors, thus requiring for the hovering 22.8
kW. We have used this same program for many prop sizes: see spread sheet. 28 x 12, 30 x 12.
Prop and motor matching Now it is very important to know if the Rotomax motor 150 cc can deliver the power required by the
prop at the propeller speed. This matching issue is most important. There are a number of software
programs for this: http://www.ecalc.ch/motorcalc.php?hacker&lang=en&elevation=300 ,
www.adamone.rchomepage.com/calc_thrust.htm. For the Rotomax 150 there is quite an equivalent
in the performance as the designs seem identical the Hacker A200 6 is quite similar as the Rotomax.
So we can therefore we can use this program to simulate the performance of the Rotomax. The
power it can produce is given in the below:
Speed of the motor Rev/min 2000 2500 3000 3500 4000 4500 5000 5500 6000 6500 7000 7500
Power delivered to prop Watt 2842 3552 4263 4973 5684 6394 7105 7815 8526 9236 9947 10657
With the motor and propeller together we can see that the prop required power will exceed the
delivered power of the motor at ca 5000 rev per min.
0
5000
10000
15000
20000
25000
0 2000 4000 6000 8000
Po
we
r in
Wa
tt
Revs per min
Matching prop and motor
power delivered by motor
power required by prop
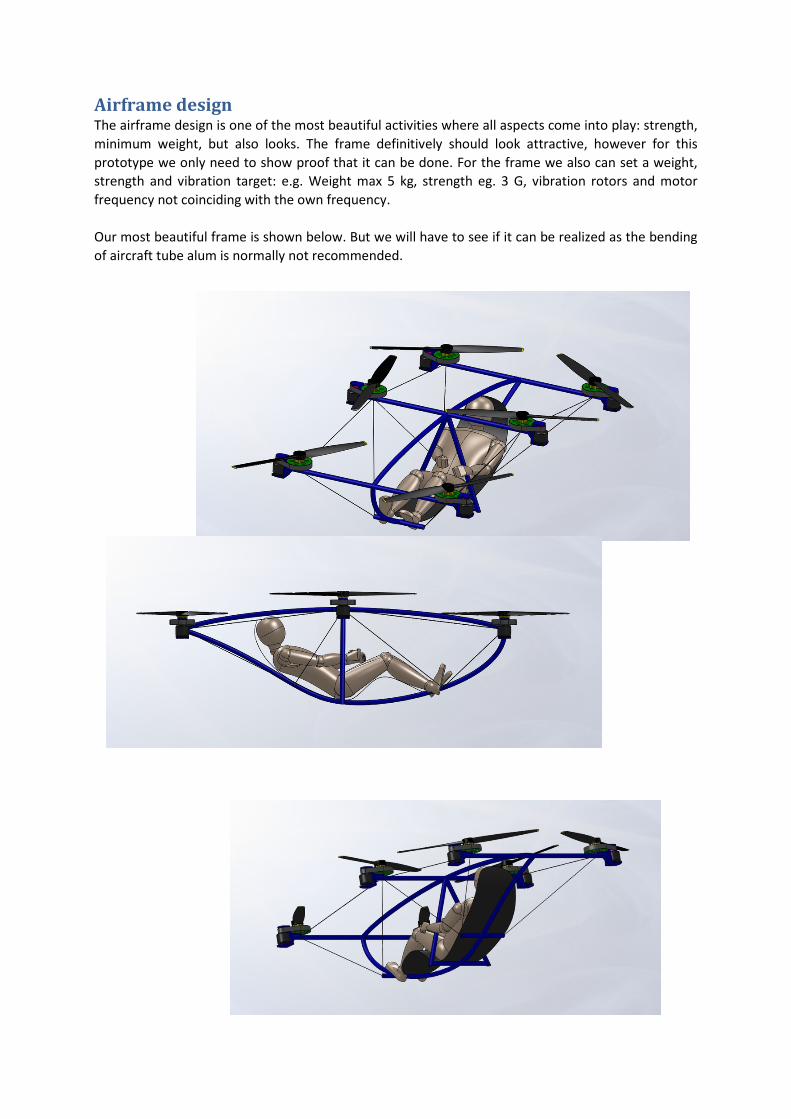
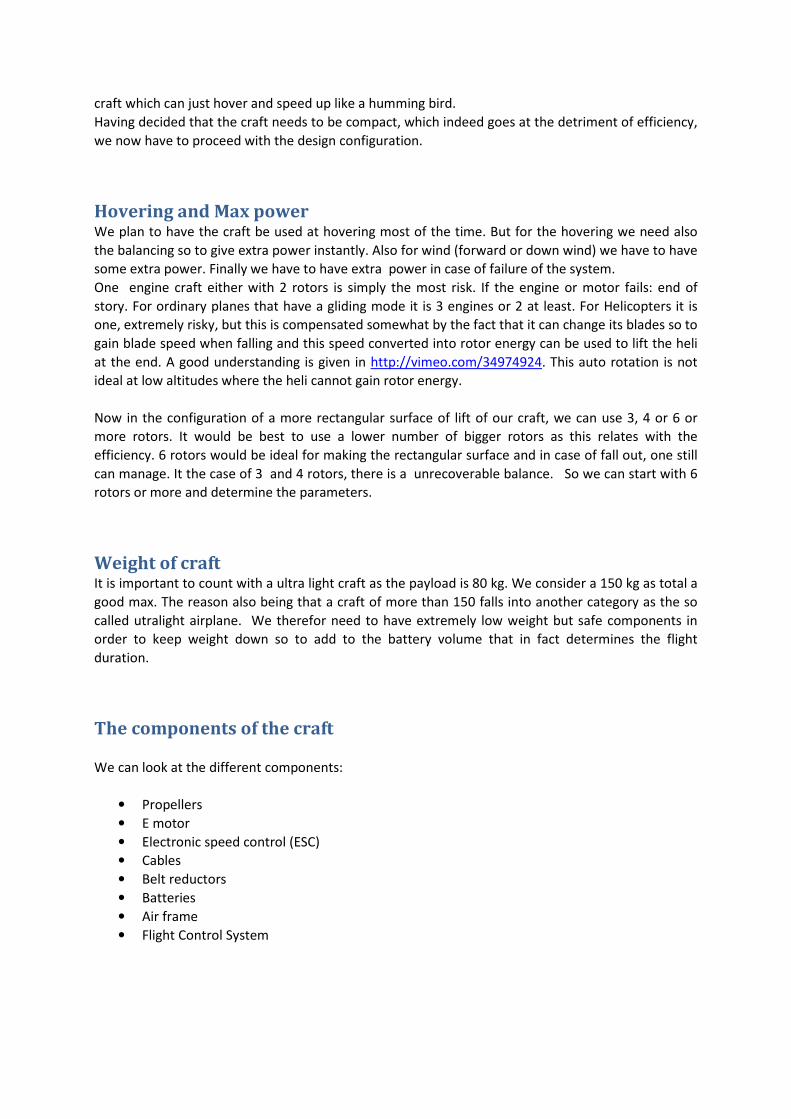
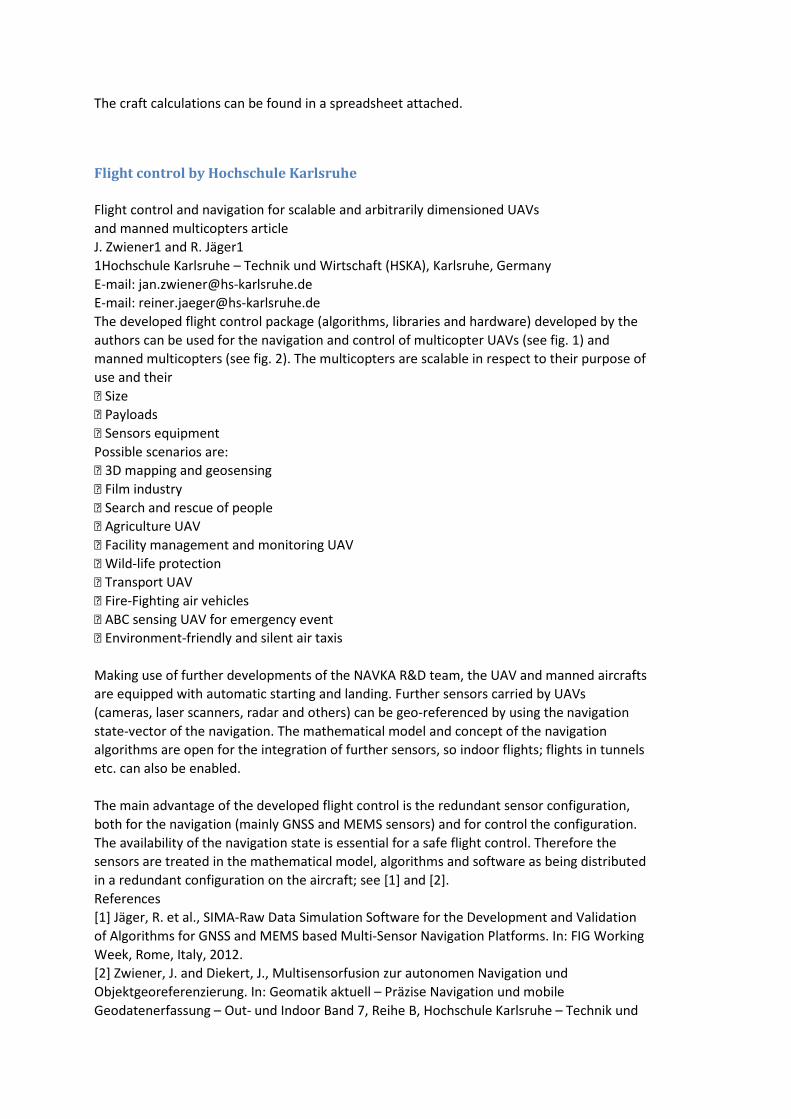
Airframe design The airframe design is one of the most beautiful activities where all aspects come into play: strength,
minimum weight, but also looks. The frame definitively should look attractive, however for this
prototype we only need to show proof that it can be done. For the frame we also can set a weight,
strength and vibration target: e.g. Weight max 5 kg, strength eg. 3 G, vibration rotors and motor
frequency not coinciding with the own frequency.
Our most beautiful frame is shown below. But we will have to see if it can be realized as the bending
of aircraft tube alum is normally not recommended.

So with a 12 rotors we will have other wiring configuration. Also we plan at the start to have the
rotors in the middle section placed more apart. For the 12 rotor frame with only straight tubes we
can follow a straight version of this frame or make it slightly more 3 dimensional.
So such structure in tubes would be
relatively easy to construct and give
strength (all triangles).
Battery design Battery design requires a number of considerations but foremost is kW per weight and kWh per
weight. We calculated 2 battery types for this: one with extra kW/kg power due to nano part
technology and the other one standard. As can be seen the nano part system allows less batteries to
be used 26 units. However for the duration both produce equal energy and have a need for 68
batteries. In the below table we can see that the first calculation is to find out how much energy is
required: This comes to 5066 Amph at the working voltage of 55 V. Then we need to see how much
packages of 4 S cells we need: on the safe side we would take 16S, so 4 packs. Then we proceed to
check the requirement for the Amps that can be delivered as it is a short time that the batteries are
drawn. Here we see a substantial difference between the first type of batteries and the second (nano
tech). The nano tech batteries can deliver much more amps so are more interesting. Finally we need
to calculate the requirements in flight duration so to devide the amph required by the flight duration
by what is in the lipo cells. So in this case 92 Amp by 5 . This results in ca 18 units that again need to
be multiplied by 4 to get to the required working voltage.
Parameter Unit Value Value
Capacity required Watt 25333 25333
Voltage requirement V 55 55
Amps required A 461 461
Flight time required min 12 12
Energy required Watthrs 5067 5067
Amph 92 92
Voltage at discharge value V 3.7 3.7
No of cells No 14.9 14.9
Packs Turnekey 4S 4S
Capacity(mAh) mAh 5000 5000
Voltage V 14.8 14.8

Config (s) 4 4
Discharge (c) A 25 65
Weight (g) gr 552 576
Max Charge Rate (C) 2 8
Length-A(mm) mm 147 153
Height-B(mm) mm 49 49
Width-C(mm) mm 33 37
Volume per Pack dm3 0.24 0.28
Cost per Pack Euro 29 56
Cost per Wh Euro 0.39 0.76
Cost per W capac Euro 0.08 0.06
No of packs for voltage to operating voltage
No 3.7 3.7
No of Packs for amps requirement No 18.4 7.1
No of Packs for flight time requirement
No 18.4 18.4
Total no of Packs for amps No 68 26
Total no of Packs for flight time No 68 68
Total volume of Packs for amps liter 16.3 6.3
Total volume of Packs for flight time
liter 16.3 16.3
Total weight of Packs for amps kg 38 15
Total weight of Packs for flight time kg 38 39
Total cost of Packs for amps Euro 1986 1472
Total cost of Packs for flight time Euro 1986 3828
Now there is a minor adaption we need to do. The 4 batteries of 4S produce 16 S and we have per
rotor point 2 motors and 6 rotor points. So the values of batteries need to be devided by 4 and by 6
to make good pairs so 24 batteries would be available per rotor point or 48 per motor, but we need
68 so if we would have 3 parallel sets we would need 72 batteries. If we make a central battery
system we can do with 68 as this is dividable by 4. We should understand that the above calculations
are done for the average hovering flight, not for redundancy. But with the selection of the nano tech
batteries we have that build in with a factor 68/26.
The above shows that the batteries are the essential component with most weight. The battery
location is to be ventilated.
Costs of system components The system costs can now be calculated as all components have been designed and therefore we can
see the below table showing that the costs of this alternative are reasonable.
Overview costs No units Price/unit Total costs Weight/unit Total weight
Motors
Motors no No 12 334 4008 3 30
Batteries
Batteries no No 66 56 3690 1 38
Battery box
No of boxes No 11 5 30 0 1
Cables
No No (m) 10 3 25 0 1
Controler

No of controlers No 12 99 1188 0.164 1.968
Propellor
No of propellers No 12 90 1080 0 4
Airframe
No of kg kg 5 90 452 5 5
Radio Control receiver and sender
No of controler No 1 500 500 1 1
Subtotal 10973 81
The Making and testing of the craft
The making of the craft starts with the ordering of the components and testing them. The testing is
done in many steps.
Eg the frame testing: first the connectors should be tested; the tubes connectors glue needs to be
tested with the connector. Once the frame design has been made we can test it by simulation. Then
after building we can test it by adding weight (static testing)
Eg the motors and batteries and ESC; here we can see the duration tests of a single motor prop ESC
and battery unit. If these work according to anticipated we can later test all at once.
Eg the propellers trust can be tested by the pod configuration of it: in the contra rotating mode.
Amps (A), trust (kg), V battery, duration, vibration peaks, rev’s min, etc.. can be measured
The control system can be tested by a connection to a smaller system, but ultimately needs to be
tested on the craft.
The craft is made in a clean environment with good climate control. This to avoid condensation on
components or effects on the parts.
The craft in its entire shape will first be tested in a building. It will be connected to the ground such
that hovering capability can be tested. The weight of the payload is not a person yet. Ultimately
when all tethering diseases have been solved, an open air test can be done. Again in careful steps.
Remember safety is a prime concern.
Notes
The craft calculations can be found in a spreadsheet attached.
Flight control by Hochschule Karlsruhe
Flight control and navigation for scalable and arbitrarily dimensioned UAVs
and manned multicopters article
J. Zwiener1 and R. Jäger1
1Hochschule Karlsruhe – Technik und Wirtschaft (HSKA), Karlsruhe, Germany
E-mail: [email protected]
E-mail: [email protected]
The developed flight control package (algorithms, libraries and hardware) developed by the
authors can be used for the navigation and control of multicopter UAVs (see fig. 1) and
manned multicopters (see fig. 2). The multicopters are scalable in respect to their purpose of
use and their
Size
Payloads
Sensors equipment
Possible scenarios are:
3D mapping and geosensing
Film industry
Search and rescue of people
Agriculture UAV
Facility management and monitoring UAV
Wild-life protection
Transport UAV
Fire-Fighting air vehicles
ABC sensing UAV for emergency event
Environment-friendly and silent air taxis
Making use of further developments of the NAVKA R&D team, the UAV and manned aircrafts
are equipped with automatic starting and landing. Further sensors carried by UAVs
(cameras, laser scanners, radar and others) can be geo-referenced by using the navigation
state-vector of the navigation. The mathematical model and concept of the navigation
algorithms are open for the integration of further sensors, so indoor flights; flights in tunnels
etc. can also be enabled.
The main advantage of the developed flight control is the redundant sensor configuration,
both for the navigation (mainly GNSS and MEMS sensors) and for control the configuration.
The availability of the navigation state is essential for a safe flight control. Therefore the
sensors are treated in the mathematical model, algorithms and software as being distributed
in a redundant configuration on the aircraft; see [1] and [2].
References
[1] Jäger, R. et al., SIMA-Raw Data Simulation Software for the Development and Validation
of Algorithms for GNSS and MEMS based Multi-Sensor Navigation Platforms. In: FIG Working
Week, Rome, Italy, 2012.
[2] Zwiener, J. and Diekert, J., Multisensorfusion zur autonomen Navigation und
Objektgeoreferenzierung. In: Geomatik aktuell – Präzise Navigation und mobile
Geodatenerfassung – Out- und Indoor Band 7, Reihe B, Hochschule Karlsruhe – Technik und

Wirtschaft, 2012. ISBN 9783890631066.





























