Embed Size (px)
DESCRIPTION
it is requred
Citation preview

MODEL-BASED CONDITION MONITORING FOR RAILWAYVEHICLE SYSTEMS
Ping Li and Roger Goodall
Department of Electronic and Electrical Engineering, Loughborough University, UKEmail: [email protected], [email protected]
Tel: +(44)-(0)1509 227015 Fax: +(44)-(0)1509 227008
Keywords: Fault detection and isolation Kalman filterVehicle dynamical model Condition monitoring
Abstract
Although modelling techniques for railway vehicle dynamicsare well-developed, much of the development in railway ve-hicle condition monitoring has relied on the knowledge-basedtechniques where no analytical system model is employed andonly qualitative or empirical system knowledge are used forfault diagnosis. In this paper, the model-based approach is pro-posed as an alternative for railway vehicle condition monitor-ing and the basic idea behind the approach is presented. Theperformance of the proposed method is evaluated through sim-ulations and some preliminary results are provided.
1 Introduction
Condition monitoring for railway vehicle systems has receivedincreasing attention both from academia and railway indus-try. This development is mainly stimulated by the growingdemands on cost efficiency, reliability and safety for railwayvehicle and rail services. The research presented in this paperis a part of the research project known as ERCIR (EnhancedRail Contribution by Increased Reliability) which is funded byUK Department for Transport. The project aims to improve theperformance of rail-related fault prediction and diagnosisviain-service condition monitoring of both vehicles and track.
The problem of fault detection and isolation (FDI) in dynamicsystems has attracted considerable attention world-wide andhas been theoretically and experimentally investigated with dif-ferent types of approaches, as can be seen from a large numberof survey papers [14], [4], [1], [3] and books (seee.g. [12],[2]) on the subject. The FDI approaches appearing in literaturefall into two major categories — model-based approaches andknowledge-based approaches. Model-based approaches relyon the idea of analytical redundancy, the essence of the ideabeing the comparison of the system’s available measurementswith a priori information represented by the system’s mathe-matical model. In contrast, knowledge-based approaches com-plement the model-based approaches and can be used in thecase where the mathematical model of the monitored systemis not available or in the case where the modelling uncertaintyis noticeable. Clearly a perfect analytical model (if available)represents the deepest and most concise knowledge of the sys-tem. Hence, in the case of information-rich system where thedynamic behaviour of system can be well-described by mathe-matical model, the analytical model-based methods are by na-
ture the most powerful fault diagnosis methods.
Although, in the past three decades, model-based FDI has beenthoroughly studied and a large variety of analytical model-based methods have been proposed and successfully used tosolve many practical FDI problems in various areas, very fewresults on model-based FDI for railway vehicle dynamic sys-tems are reported. Most of the methods for FDI in railwayvehicle/track systems that have appeared in literature (seee.g.[13]) can be grouped into the knowledge-based approach men-tioned above where no mathematical models describing the dy-namical behavior of the railway vehicle system are employed.This means that somea priori knowledge or information onrailway vehicle dynamics is lost and there is the potential ofimprovement in FDI performance if the knowledge or informa-tion is fully used. On the other hand, modelling techniques andspecific models for railway vehicle dynamic systems are well-developed [7], [11], and considerable progress on the model-based state estimation for railway vehicle has also been madein recent years [10], [6]. However, these were principally de-veloped for simulation and controller design. In this paper, themodelling techniques for railway vehicle are combined with theidea of the model-based FDI and a Kalman filter based methodis proposed to be used in the railway vehicle condition monitor-ing system for diagnosing faults in railway vehicle suspensionsystem. The paper is organized as follows. Section 2 devel-ops a plan view dynamic model to be used in model-based FDIdesign, then the Kalman filter based approach to FDI of therailway vehicle suspension system is presented in Section 3.Section 4 provides some results from applicability studies andConclusions are drawn in Section 5.
2 Modelling of railway vehicle dynamics
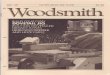
The first step for model-based FDI is to develop suitable mod-els to describe the dynamic behaviour of the railway vehiclesystem. Although very complex non-linear simulation mod-els are available using MBS tools, these are too complicatedand it is necessary to develop appropriately-simplified modelswhich capture the essential dynamic characteristics related tothe problem being considered. The authors’ work has focussedupon the problem that affects running stability for which thelateral and yaw modes are important, and Figure 1 shows aplan view of a conventional bogie vehicle and the configurationof the sensors. The wheelsets and bogie have two degrees-of-freedom (lateral and yaw), and a half-vehicle model is beingused so the vehicle body just has the lateral degree-of-freedom.The corresponding equations of motion of the vehicle travel-ling on straight track are derived as follows:
Control 2004, University of Bath, UK, September 2004 ID-058

Figure 1: Plan view of half body vehicle and sensor configuration
yw1 = − 2f22mw1v yw1 − Ky
mw1yw1 + 2f22
mw1Ψw1 + Ky
mw1yb
+a0Ky
mw1Ψb
Ψw1 = − 2f11l20Iw1v Ψw1 − KΨ
Iw1Ψw1 + KΨ
Iw1Ψb − 2f11λl0
Iw1r0d1
yw2 = − 2f22mw2v yw2 − Ky
mw2yw2 + 2f22
mw2Ψw2 + Ky
mw2yb
−a0Ky
mw2Ψb
Ψw2 = − 2f11l20Iw2v Ψw2 − KΨ
Iw2Ψw2 + KΨ
Iw2Ψb − 2f11λl0
Iw2r0d2
yb = Ky
mbyw1 + Ky
mbyw2 − Cyb
mbyb − 2Ky+Kyb
mbyb
+Cyb
mbybd + Kyb
mbybd
Ψb = a0Ky
Ibyw1 + KΨ
IbΨw1 − a0Ky
Ibyw2 + KΨ
IbΨw2
−CΨb
IbΨb − 2a2
0Ky+2KΨIb
Ψb
ybd = Cyb
mbdyb + Kyb
mbdyb − Cyb
mbdybd − Kyb
mbdybd
d1 = yw1 − yt1
d2 = yw2 − yt2
(1)
whereyw1 andyw2 are the lateral displacements of the lead-ing and trailing wheelsets respectively,yb andybd are the lat-eral displacements of the bogie and vehicle body respectively,Ψw1 andΨw2 are the yaw angles of the leading and trailingwheelsets, andΨb is the yaw angle of the bogie.yt1 andyt2
represent the lateral track displacement (track irregularity) atthe leading and trailing wheels respectively andd1 = yw1−yt1
andd2 = yw2 − yt2 are the relative lateral deflections betweenleading/trailing wheel and rail. The nominal parameter valuesin the equations are given in the Appendix. It can been seen thatthe dynamic behaviour of a railway vehicle is very complex andhighly interactive, even with a relatively simple model.
To develop the model-based FDI schemes, a state-space formof the plan view dynamical model can be derived from (1) as:
x = Ax + Gβ (2)
where
x =[
yw1 yw1 Ψw1 Ψw1 yw2 yw2 Ψw2 Ψw2 yb yb
Ψb Ψb ybd ybd d1 d2
]T
β =[
yt1 yt2
]T
matricesA andG can be readily derived from the equations(1) andβ can be approximated as zero mean white Gaussiannoise (seee.g. [6]) with variance4π2Arv
2 to represent trackirregularities, whereAr is the track roughness factor.
Since a direct measurement of lateral displacements and wheel-rail deflections is not feasible in practice, five sensors (a gyro(Gb) and four accelerometers (A1, A2, Ab andAbd)) are chosenas shown in Figure 1 which can measure the lateral accelera-tions of the two wheelsets (yw1 andyw2), the lateral accelera-tion and yaw velocity of the bogie (yb andΨb) and the lateralacceleration of the vehicle body (ybd). The measurement equa-tion is given as follows:
y = Hx + v (3)
where,y =[
yw1 yw2 yb Ψb ybd
]T, v represents the
measurement noise vector and the measurement matrixH isobtained readily from the system matrixA.
Control 2004, University of Bath, UK, September 2004 ID-058

For most practical applications, the measurements are usuallysampled-data (i.e. discrete) resulting from the digital imple-mentation and the discrete version of the above model is givenas follows (seee.g. [9]):
xk = Fxk−1 + Γwk (4)
yk = Hxk + vk (5)
where,F = eAT , Γ =∫ T
0eAτGdτ andwk, vk are white
Gaussian noises of appropriate strength,T is the sampling pe-riod for measurements.
3 Model based FDI design
3.1 Background
The general procedure of model-based FDI can be split intotwo steps: generation of fault accentuated signals (known asresiduals in FDI literature) on the basis of the available mea-surements and a mathematical model of the system; residualevaluation, namely decision on the occurrence of a fault andisolation of the faulty element based on the residuals generated.The heart of procedure is the generation of residuals. There aremany approaches to constitute the residual generator in the lit-erature (seee.g. [4], [12], [3], [2]). A straightforward methodis based on parameter estimation (seee.g.[4]), in which the pa-rameters of the monitored system are estimated using the mea-surements available and the resulting estimates are comparedwith their nominal values. The difference is then taken as theresidual signal for FDI decision. This approach is particularlyuseful for the detection and isolation of the incipient or drift-like faults where the parameters associated with the faults tobe detected can be considered as constant during a short pe-riod of time within which the measurement is made. The keyof the approach is the parameter estimation method employed.However, our earlier research [8] has shown that direct esti-mation of specific parameters associated with the faults to bedetected in the railway vehicle suspension system described byequations (2) and (3) is not straightforward. The solution tothe problem involves the combined parameter and state estima-tion which was usually posed as a nonlinear filtering problem.The popular extended Kalman filter (EKF) based method hasbeen tried for the problem but failed and a Rao-Blackwellizedparticle filter (RBPF) based method has been developed in [8]to address the issue. However, the RBPF based method is ingeneral computationally expensive and can only be used in thecase where the detection time is of minor importance, hencethe method is of major relevance in connection with conditionmonitoring and maintenance problems where early detection ofworn equipment is required. In the rest of the paper, we shallfocus on the detection of abrupt (or hard) faults which usuallyneed immediate attention and hence the on-line detection.
3.2 Innovation-based FDI design
One of the main difficulties in fault detection of the stochasticsystem described by (4) and (5) is due to the presence of un-known and unmeasured state variablesx. The commonly usedapproach to deal with it is estimation. For linear Gaussian sys-tem, the states are estimated using a Kalman filter according to
the following equations:
Prediction :xk|k−1 = Fxk−1
Pk|k−1 = FPk−1FT + ΓQwΓT
Correction :xk = xk|k−1 + Kkrk
Kk = Pk|k−1H[HPk|k−1HT + Qv]−1
Pk = Pk|k−1 −KkHPk|k−1
(6)
where,rk is the innovation given by:
rk = yk −Hxk|k−1 (7)
It is well-known that, under fault free or normal operation, theinnovations are zero mean Gaussian with covariance
Qr = HPk|k−1HT + Qv (8)
Any faults or changes in system dynamics can therefore be de-tected by a change in the weighted squared residual (WSR)measure
lk = rTk Q−1
k rk (9)
which isχ2 distributed withm degrees of freedom, wheremis the dimension of measurement vectory. This however canlead to false alarms occurring at a particular instant due to dis-turbances and noise and a more robust decision function forfault detection is the weighted sum squared residual (WSSR)(see e.g. [5] [14]) defined as follows:
dk =k∑
j=k−W+1
lj =k∑
j=k−W+1
rTj Q−1
j rj (10)
whereW is the length of the sliding window within which theresidual measure is summed. In the absence of a fault this quan-tity is a chi-squared random variable withWm degrees of free-dom, and so fault detection can be achieved by a chi-squaredhypothesis test. The window lengthW should be chosen in ac-cordance with the requirement for detection time and the faultalarm is set at timek when the condition
dk > h (11)
is satisfied,h being the threshold which is chosen accordingto the required false alarm probability, window length and chi-squared tables. For the given threshold, window length pro-vides a trade-off between fast detection and false alarm rate.
The information for fault isolation can also be obtained byanalysing the components of the innovation vectorr separately,for example, by calculating the r.m.s or performing power spec-tral density (PSD) analysis for each component ofr.
4 Applicability studies via simulations
Since our aim is to monitor the condition of vehicle suspen-sion systems and the solid state inertial sensors have been se-lected for taking measurements which are much more reliableand cheaper than the conventional mechanical inertial sensors,sensor faults will not be considered here. In the following sim-ulation studies, the attention will be focused on the monitoring
Control 2004, University of Bath, UK, September 2004 ID-058

of changes in damping coefficients as the damper faults havebeen identified as the common faults in railway vehicle sus-pension system and are difficult to test in situ. In particular,we will focus on the detection and isolation of the abrupt (or“hard”) faults in secondary lateral and anti-yaw dampers whichlead to the abrupt changes in the values of damping coefficientsCyb andCΨb.
In the simulations, the data are generated using model (2) and(3) developed in Section 2 with constant forward speed. Thesampling frequency for measurement is chosen asfs = 1kHz.The faults are simulated to occur at time 2.5(sec) at which pointthe faulty parametersCyb or CΨb in Figure 1 are reduced by50%. The Kalman filter is designed based on model (4) and (5)with nominal parameter values given in the Appendix and theWSSR detector defined by (10) and (11) withW = 100 (i.e.100mS) is used to detect these faults.
0 5 10 15 200
1
2
3
4
5
6x 10
−9 PSD (yaw gyro)
(rad
/s)2 /H
z
Hz0 5 10 15 20
0
0.5
1
1.5
2
2.5
3x 10
−5 PSD (body accelerometer)
(m/s
2 )2 /Hz
Hz
0 5 10 15 200
0.5
1
1.5x 10
−7 PSD (bogie accelerometer)
(m/s
2 )2 /Hz
Hz0 1 2 3 4
0
1000
2000
3000
4000
WSSR
t (sec)
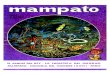
Figure 2: PSD of innovations (‘+’ line—before fault, solidline—after fault) and WSSR with fault inCyb
0 5 10 15 200
0.5
1
1.5
2x 10
−7 PSD (yaw gyro)
(rad
/s)2 /H
z
Hz0 5 10 15 20
0
1
2
3
4x 10
−8 PSD (body accelerometer)
(m/s
2 )2 /Hz
Hz
0 5 10 15 200
1
2
3
4x 10
−8 PSD (bogie accelerometer)
(m/s
2 )2 /Hz
Hz0 1 2 3 4
0
200
400
600
800
WSSR
t (sec)
Figure 3: PSD of innovations (‘+’ line—before fault, solidline—after fault) and WSSR with fault inCΨb
The WSSR (dk) calculated by (10) and the PSD of the innova-
tions from the bogie yaw gyro and the vehicle body accelerom-eter before and after the onset of the faults are plotted in Fig-ures 2 and 3. It can been seen, from these figures, the faultscan be detected by thresholding WSSR (dk), and once the faultalarm is set, the innovations from the bogie yaw gyro and thevehicle body accelerometer recorded just before and after faultalarm can be used for PSD or r.m.s calculation, fault isolationcan then be achieved by comparing the PSDs or the r.m.s cal-culated using the innovation data before and after fault alarm.
1 2 3 4
0.5
1
1.5
2
2.5
3
3.5
x 10−5
t (sec)
r.m
.s(r
ad/s
) (y
aw g
yro)
lateral damper fault
1 2 3 4
1
2
3
4
5
6
x 10−5
t (sec)
r.m
.s(r
ad/s
) (y
aw g
yro)
anti−yaw damper fault
1 2 3 4
1
2
3
4
5
6x 10
−4
t (sec)
r.m
.s(m
/s2 )
(bod
y ac
cel.)
lateral damper fault
1 2 3 4
2
4
6
8
10
x 10−5
t (sec)
r.m
.s(m
/s2 )
(bod
y ac
cel.)
anti−yaw damper fault
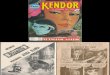
Figure 4: r.m.s of innovations (dashed line—without low-passfilter, solid line—with low-pass filter) from bogie yaw gyro(top) and vehicle body accelerometer (bottom)
Figure 5: Kalman filter based FDI procedure
The PSDs of the innovations in Figures 2 and 3 before andafter fault onset time show that the faults affect only the lowfrequency components in certain innovation sequences, whichsuggests that low-pass filtering the innovations before r.m.s cal-culation would help to isolate different faults. Figure 4 showsthe r.m.s of innovations from the vehicle body accelerometerand the bogie yaw gyro under different fault conditions. A3rd order standard Butterworth low pass filter with cutoff fre-quencyfc = 10Hz is used in calculation (10Hz is chosen froma priori knowledge that the main dynamic modes of the cho-sen vehicle are below 10Hz). It can be seen, from these figures,
Control 2004, University of Bath, UK, September 2004 ID-058

that the lateral damper fault will not affect the r.m.s of the inno-vation from the bogie yaw gyro, whereas, the anti-yaw damperfault will not affect the r.m.s of the innovation from the body ac-celerometer. The resulting Kalman filter based FDI procedureto be used in the railway vehicle condition monitoring systemis depicted in Figure 5.
5 Conclusions
A Kalman filter-based innovation method has been proposedin this paper for detecting and isolating faults in railway ve-hicle suspension system based on the derived vehicle dynamicmodel. The method is computationally efficient and has rapidresponse to the abrupt fault, thus suitable for using on line todetect and isolate the abrupt or “hard” faults which usuallyneed immediate attention. This complements the RBPF basedparameter estimation method developed in [8]. As such, a com-bination of both methods is believed to be the most appropriatesolution to the model-based railway vehicle condition monitor-ing problem. Further work will be carried out to address therobustness issues and integrate the model-based methods withthe knowledge based processing so as to improve the overallperformance of the railway vehicle condition monitoring sys-tem, and results from an experimental programme on a realrailway vehicle are also being assessed.
Acknowledgements
The authors would like to thank the UK DfT for their fundingsupport, and the collaboration on the project from The Univer-sity of Birmingham, AEA Technology Rail, Alstom and Nexus.
References
[1] M. Basseville. Statistical approaches to industrial moni-toring problems — fault detection and isolation. InProc.IFAC System Identification’97, pages 413–432, Fukuoka,Japan, 1997.
[2] J. Chen and R.J. Patton.Robust Model-based Fault Di-agnosis for Dynamic Systems. Kluwer Academic, USA,1999.
[3] P.M. Frank, S.X. Ding, and B. Koppen-Seliger. Cur-rent developments in the theory of FDI. InProceedingsof IFAC Symposium on SAFEPROCESS’2000, volume 1,pages 17–28, June 2000.
[4] R. Isermann. Process fault detection based on modelingand estimation methods — a survey.Automatica, 20:387–404, 1984.
[5] V. Kadirkamanathan, P. Li, M.H. Jaward, and S.G.Fabri. Particle filtering-based fault detection in non-linearstochastic systems.Int. J. Systems Science, 33(4):259–265, 2002.
[6] H. Li. Measuring systems for active steering of railwayvehicles. PhD thesis, Loughborough University, 2001.
[7] H. Li and R. M. Goodall. Modelling and analysis of a rail-way wheelset for active control. InProc. of UKACC In-ternational Conference on Control’98, pages 1289–1293,Swansea, UK, 1998.
[8] Ping Li, Roger M. Goodall, and Visakan Kadirka-manathan. Parameter estimation of railway vehicledynamic model using Rao-Blackwellised particle filter.In Proceedings of the European Control ConferenceECC2003, Cambridge, UK, Sept 2003.
[9] P. S. Maybeck. Stochastic Models, Estimation, andControl—Volume 2. Academic Press, 111 Fifth Avenue,New York, 1982.
[10] T. X. Mei, H. Li, and R. M. Goodall. Kalman filters ap-plied to actively controlled railway vehicle suspensions.Transactions of the Institute of Measurement and Control,23(3):163–181, 2001.
[11] T. X. Mei, Z. Nagy, and R. M. Goodall. Modelling com-parison of actively-steered railway vehicles using Sim-pack and Matlab. InProc. of 5th European Control Con-ference, Karlsruhe, Germany, 1999.
[12] A.D. Pouliezos and G.S. Stavrakakis.Real Time FaultMonitoring for Industrial Processes. Kluwer AcademicPublishers, Netherlands, 1994.
[13] R. Sunder, A. Kolbasseff, A. Kieninger, A. Rohm, andJ. Walter. Operational experiences with onboard diagno-sis system for high speed trains. InProceedings of theWorld Congress on Rail Research, Cologne, Germany,November 2001.
[14] A.S. Willsky. A survey of design methods for failuredetection in dynamic systems.Automatica, 12:601–611,1976.
Appendix. Symbols and parameter values for therailway vehicle dynamical model
mw Wheelset mass(1000kg)Iw Wheelset yaw inertia(600kgm2)mb Bogie mass(2000kg)Ib Bogie yaw inertia(2300kgm2)mbd Vehicle body mass associated with the bogie(8720kg)Ky Primary lateral stiffness per wheelset(4000kN/m)KΨ Primary yaw stiffness per wheelset(4000kN/rad)Kyb Secondary lateral stiffness per bogie(160kN/m)Cyb Secondary lateral damping per bogie(16kNs/m)CΨb Secondary anti-yaw damping per bogie(500kNs/rad)f11 longitudinal creep coefficient(7.4MN )f22 lateral creep coefficient(6.2MN )a0 Semi wheel-wheel spacing(1.05m)l0 Half gauge(0.75m)λ Conicity (0.15)v Vehicle forward velocity(20m/s)r0 Wheelset radius(0.37m)Ar track roughness factor(0.33× 10−6)
Control 2004, University of Bath, UK, September 2004 ID-058