Embed Size (px)
Citation preview

1
Viscous Fluid
1 Description of motion
Let P be a fluid particle which at time t0 occupied the position X and at time t
occupies the position x. Since each fluid particle have unique positions at t0 and t,
we can define a mapping κ such that
X = κ(P, t0) and x = κ(P, t)
The location at t0 is known as reference coordinate and at t is known as current
coordinate. We can eliminate P from the above to get
x = x(X, t) and X = X(x, t)
The problem in fluid mechanics may be formulated either using (X, t) as indepen-
dent variables (material or Lagrangian description) or using (x, t) as independent
variables (spatial or Eulerian description).
2 Material derivative
The time rate change of a quantity (scaler, vector or tensor) of a material particle
is known as material time derivative. There are two cases to consider.
(i) The material description of the quantity is used i.e. the quantity is a function
of X and t. We only have to take partial derivative with respect to t. Thus if
φ(X, t) is a scaler filed, then its material derivative is given by
Dφ
Dt:=
∂φ(X, t)
∂t
(ii) The spatial description of the quantity is used. If φ(x, t) is a scaler filed, then
its material derivative is given by
Dφ
Dt:=
(∂φ(x(X, t), t)
∂t
)X−fixed
This could be simplified as follows: Since
φ(x(X, t), t) = φ (x1(X, t), x2(X, t), x3(X, t), t)

2
we have(∂φ(x(X, t), t)
∂t
)X−fixed
=∂φ(x(X, t), t)
∂x1
∂x1(X, t)
∂t+∂φ(x(X, t), t)
∂x2
∂x2(X, t)
∂t
+∂φ(x(X, t), t)
∂x3
∂x3(X, t)
∂t+∂φ(x(X, t), t)
∂t
=∂φ(x(X, t), t)
∂xi
∂xi(X, t)
∂t+∂φ(x(X, t), t)
∂t
Now we come back to the spatial coordiantes by substituting X = X(x, t), t)
to get
dφ(x(X, t), t)
dt
∣∣∣∣X=X(x,t)
=∂φ(x, t)
∂xi
vi(x, t) +∂φ(x, t)
∂t= v · (∇φ) +
∂φ(x, t)
∂t
where v is the Eulerian velocity field. Thus for Eulerian field we have impor-
tant formulaDφ
Dt:= v · (∇φ) +
∂φ(x, t)
∂t
Next let u(x, t) be an Eulerian vector field. So we have
Du
Dt:=
(∂u(x(X, t), t)
∂t
)X−fixed
Now the components ui(x, t) of u(x, t) is a scaler field. Hence using the above
result we write
Dui
Dt:=
∂ui(x, t)
∂t+ v · (∇ui) =
∂ui(x, t)
∂t+ (∇u)ijvj
ThusDu
Dt:=
∂u(x, t)
∂t+ (∇u(x, t))v(x, t)
3 Deformation gradient and change of area and
volume element
From
x = x(X, t)
we can write
dx = F dX
where F is known as deformation gradient.

3
Let (dA,N ) and (da,n) be the elemental surface and normal pairs in the refer-
ence and current frame respectively. Then we have
n da = JF−T N dA
where J = det(F ). Also if dv and dV are the volume in the current and reference
configuration respectively, then
dv = J dV
4 Velocity gradient
The velocity gradient L is deined as the spatial gradient of the velocity i.e.
L = ∇v, Lij = vi,j
L can be decompose as a sum of symmetric and skew-symmetric part i.e.
L = D + W
where
Dij =1
2(vi,j + vj,i), Wij =
1
2(vi,j − vj,i)
Some useful relations involving velocity gradient are
DF
Dt= LF
DJ
Dt= Jtr(L) = Jvi,i
5 Transport formulas
We are interested in calculating the rate of change of integrals over material curves,
surfaces and volumes respectively. Let Ct, St and Ωt denote the material curve,
surface and volume respectively in the current frame. Then we have the following

4
formulas
d
dt
∫Ct
φdx =
∫Ct
(Dφ
Dt+ φL
)dx
d
dt
∫St
φnda =
∫St
[(Dφ
Dt+ φ tr(L)
)n− φLT n
]da
d
dt
∫Ωt
φdv =
∫Ωt
(Dφ
Dt+ φ tr(L)
)dv
d
dt
∫Ct
u · dx =
∫Ct
(Du
Dt+ LT u
)· dx
d
dt
∫St
u · nda =
∫St
(Du
Dt+ u tr(L)−Lu
)· nda
d
dt
∫Ωt
udv =
∫Ωt
(Du
Dt+ u tr(L)
)dv
6 Streamlines, stream tubes, path lines and streak
lines
Stream lines are lines whose tangents are everywhere parallel to the velocity vector.
Since in unsteady flow, the velocity vectors change both magnitude and direction
with time, it is meaningful to consider only the instanteneous streamlines in the
case of unsteady flow. A streamline can not cross other streamlines except at the
stagnation point. The equation of streamline can be written as
dx
u=dy
v=dz
w
We introduce a parameter s whose value is zero at some reference point and whose
value increases along the streamline. Thus we have
dx
u=dy
v=dz
w= ds
ordx
ds= v(x, t), t fixed
The collection of all streamlines that pass through an open line in a flow forms
a stream surface and the collection of all stremlines that pass throgh a closed loop
forms a stream tube. Let us consider two closed loops that wrap around a particular
stream tube. Volumetric flow rate through Si is given by

5
nn
S1
S2
Sn
Qi =
∫Si
v · n dS
Now we have
Q2 −Q1 =
∫S
v · n dS +
∫Vt
∇ · v dV =
∫Vt
∇ · v dV
Volumetric flow rate may increase or decrease accoriding to whether the fluid inside
the tube is undergoing expnasion or contraction.
A pathline is a line traced out in time by a given fluid particle as it flows.
Since the particle under consideration is moving with the fluid at its local velocity,
pathlines must satisfy the equations
dx
dt= u(x, t)
The equation of the pathline that passes through the point X at time t0 will then be
the solution of the above equation which satisfies the initial condition x(t = t0) = X
A streakline is the locus of all fluid particles that have passed through a pre-
scribed fixed point during a specific interval of time. An example of a streakline is a
line traced by the continuous injection at a certain point of dye, smoke, or bubbles.
In the case of pathline, we have time t varying from t = t0 to t = ∞. In the case of
streakline, the time t is fixed and t0 is allowed to have have all admissibale values.
Example: Consider the two-dimensional flow field defined by
u = x(1 + 2t)
v = y
w = 0
The streamline which passes through (1, 1) in parametric form is
x = e(1+2t)s
y = es

6
The streamline passing through (1, 1) at t = 0 is
x = es
y = es
or eliminating s we get
x = y
The pathline of the particles passing through (1, 1) at t = 0 is
x = e(1+t)t
y = et
or eliminating t we get
x = y1+log y
The pathline of the particle which is at (1, 1) at t = τ is given by
x = e(1+t)t−τ(1+τ)
y = e(t− τ)
These are parametric equations for streakline that passes through (1, 1) and are
valid for all times t. In particular the streakline at t = 0 in parametric form is
x = e−τ(1+τ)
y = e−τ
or eliminating τ we get
x = y1−log y
Thus none of the three flow lines concide. But if the flow is steady, then they must
concide.
7 Vorticity
We know that the tensor W defined by
W =1
2(L−LT ) or Wij =
1
2(vi,j − vj,i)
is skew symmetric. Hence its dual vector is given by w = (w1, w2, w3) where
wi =1
2εijkvk,j

7
The vorticity ω is twice the dual vetor of W . Hence
ωi = εijkvk,j or ω = ∇∧ v
It is sometimes useful to understand the dynamics of flow by working with the
vorticity rather than the velocity field. Thus we would like to have equation for ω.
The following derivations are based on the incompressible fluid with ν = µ/ρ. The
constant ν is called kinematic viscosity. We have in absence of body forces
∂u
∂t+ (∇u)u = −∇(p/ρ) + ν∇2u
Now we use the following two identities
∇2u = ∇(∇ · u)−∇ ∧ ω
(∇u)u = ∇(|u|2
2
)+ ω ∧ u
Thus we obtained
∂u
∂t+ ω ∧ u = −∇
(|u|2
2+p
ρ
)− ν∇∧ ω
Again taking curl on both sides we get
∂ω
∂t+∇∧ (ω ∧ u) = −ν∇∧ (∇∧ ω)
= ν∇2ω
Again using the identity
∇∧ (a ∧ b) = (∇a)b− (∇b)a + (∇ · b)a− (∇ · a)b
we get∂ω
∂t+ (∇ω)u = ν∇2ω + (∇u)ω
The term ∂ω/∂t represents convection of vorticity with the flow, ν∇2ω represent
diffusion of vorticity and (∇u)ω represenst stretching of the vortex line.
7.1 Vortex lines and vortex tubes
Just as a streamlines is a curve to which the vlocity vector is tangent everywhere,
we can define a vortex line is a curve in which the vorticity is tangent everywhere.
Hence equation is given bydx
ω1
=dy
ω2
=dz
ω3

8
A vortex tube is the series of vortex line passing through a closed curve. Consider
a stream tube with one section of area S1 and the other S2. Since ∇ · ω = 0 and if
Γi =
∫Si
ω · n dS, i = 1, 2
then Γ1 = Γ2. Also using Stoke’s theorem we have
Γi =
∫Si
ω · n dS =
∫Ci
u · dx
where Ci is the curve enclosing Si. The last intergral is the circulation along the
curve.
7.2 Kelvin’s circulation theorem
We can also prove the circulation along a closed curve reamins constant for a ideal
barotropic fluid with conservative body force. For barotropic fluid we have p = p(ρ)
and hence if we define
P =
∫ p dp
ρthen ∇P =
∇pρ
Also for conservative body force we write b = ∇χ. Thus We have
Γ =
∫Ct
v · dx
Using Reynolds circulation theorem we get
dΓ
dt=
∫Ct
[Dv
Dt+ (∇v)T v
]· dx
=
∫Ct
[−1
ρ∇p+∇χ+ (∇v)T v
]· dx
=
∫Ct
∇(P + χ+
vivi
2
)· dx
=
∫Ct
d(P + χ+
vivi
2
)= 0
8 The Stream function
Sometimes it is convenient to describe fluid flow in terms of a stream function,
usually represented by ψ, that remains constant along stream line. The equation of
mass conservation states that
∇ · v = 0

9
We can take v = ∇ ∧A as a genereal solution for this. However A is not unique
since if A′ = A +∇q then
∇∧ a = ∇∧A′
Now the vorticity is
ω = ∇∧ v = ∇∧ (∇∧A) = −∇2A +∇(∇ ·A)
Since A is non unique, we impose the condition that ∇ · v = 0 and thus
ω = −∇2A
Examples
(i) Two dimensional flow : Here v = u(x, y)i + b(x, y)j. If we pick A = ψ(x, y)k
then ∇ ·A = ∂ψ/∂z = 0. Now
v = ∇∧ (ψk) =∂ψ
∂yi− ∂ψ
∂xj
Hence
u =∂ψ
∂yv = −∂ψ
∂x
For two dimensional flow we have ω = −∇2A = −∇2ψk. Hence (∇v)ω = 0. Thus
the vorticity equation becomes
∂∇2ψ
∂t+ (∇∇2ψ)v = ν∇4ψ
Thus the Navier-Stokes equation can be written as
u =∂ψ
∂yv = −∂ψ
∂x
ζ = −∇2ψ∂ζ
∂t+ (∇ζ)v = ν∇2ζ
(ii) Axisymmetric flow : In cylindrical polar coordinate, the velocity is
v = u(r, z)er + w(r, z)ez
Let us choose A = (ψ/r)eθ where ψ = ψ(r, z). Now
∇ ·A =1
r
∂
∂r(rAr) +
1
r
∂Aθ
∂θ+∂Az
∂z=
1
r2
∂ψ
∂θ= 0

10
Thus we can represent fluid velocity as
v = ∇∧A =
(1
r
∂Az
∂θ− ∂Aθ
∂z
)er +
(∂Ar
∂z− ∂Az
∂r
)eθ +
1
r
(∂
∂r(rAθ)−
∂Ar
∂θ
)ez
=1
r
(∂ψ
∂rez −
∂ψ
∂zer
)Thus we get
u = −1
r
∂ψ
∂z, w =
1
r
∂ψ
∂r
Alternatively if we have defined A = ψeθ, where ψ = ψ(r, z), then we obtain
u = −∂ψ∂z, w =
1
r
∂
∂r(rψ)
Thus the stream function can be defined in the equivalent but different ways (ii)
Spherical flow independent of azimuth φ: Here we have
v = u(r, θ)er + w(r, θ)eθ
Let us choose
A =ψ(r, θ)
r sin θeφ
then
∇ ·A =1
r2 sin2 θ
∂ψ(r, θ)
∂φ= 0
Now we have for velocity
v = ∇∧A =1
r2 sin θ
(∂ψ
∂θer − r
∂ψ
∂reθ
)Thus componentwise
u =1
r2 sin θ
∂ψ
∂θ, w = − 1
r sin θ
∂ψ
∂r
8.1 Physical interpretation
For simplicity we consider two dimensional flow. In this case we have v = ∇∧ (ψk)
Now using the identity
∇∧ (φa) = φ∇∧ a +∇φ ∧ a

11
dx
dy
we get
v · ∇ψ = ∇∧ (ψk) · ∇ψ = (∇ψ∧)k · ∇ψ = k · (∇ψ ∧∇ψ) = 0
Thus the gradient of ψ along v is zero. If dx is along the tangent to the stremline,
then dx is proportional v and hence along the streamline we have
v · ∇ψ = 0 =⇒ dψ = 0
Hence ψ is constant along the streamline. Let us consider two neighbouring stream-
lines with value of ψ on them as ψ and ψ + dψ repsectively. The unit vector in the
direction shown is
n = (dy/ds,−dx/ds)
Now the flux of fluid between them in unit time is
v · nds = u dy − v dx =∂ψ
∂ydy +
∂ψ
∂xdx = dψ
Thus the difference in ψ measures the flux per unit time.
9 The Stress tensor
The stress vector acting on the plane with unit normal n is
tn = σT n
where σ is a second order tensor called stress tensor. The components σ11,σ22, σ33
are called normal stresses and σij, i 6= j are shear stresses.
12
9.1 Stress tensor symmetric
Let Pt ⊂ Bt be an arbitrary material region in the current configuration. The
linear momentum M(Pt) of the material occupying the region Pt in the current
configuration is defined by
M(Pt) =
∫Pt
ρvdv
If x is the position vector of a point in Pt relative origin o, then the angular mo-
mentum of Pt with respect to o is defined by
G(Pt; o) =
∫Pt
x ∧ (ρv)dv
Now applying the conservation of linear momentum for the material in Pt we get
d
dt
∫Pt
ρvdv =
∫Pt
ρbdv +
∫∂Pt
t(n)da,
and applying the conservation of angular momentum we get
d
dt
∫Pt
x ∧ (ρv)dv =
∫Pt
x ∧ (ρb)dv +
∫∂Pt
x ∧ t(n)da,
Using the resultd
dt
∫Pt
ρφdv =
∫Pt
ρDφ
Dtdv
we get ∫Pt
ρ(a− b)dv =
∫∂Pt
t(n)da
and ∫Pt
ρx ∧ (a− b)dv =
∫∂Pt
x ∧ t(n)da,
where a = DvDt
is the acceleration.
From the first relation we get∫Pt
ρ(a− b)dv =
∫∂Pt
σT nda =
∫∂Pt
divσdv
From this we derive
divσ + ρb = ρa
Using this relation in second relation we get∫Pt
x ∧ (divσ)dv =
∫∂Pt
x ∧ (σT n)da
13
Now from the right hand side, we get∫∂Pt
x ∧ (σT n)da =
∫∂Pt
εijkxjσpknpeida
=
∫Pt
εijk (xjσpk),p eidv
=
∫Pt
εijk(δjpσpk + xjσpk,p)eidv
=
∫Pt
[εijkσjkei + εijkxjσpk,pei] dv
=
∫Pt
[εijkσjkei + x ∧ (divσ)] dv
Hence we get ∫Pt
εijkσjkei = 0
From this we get
εijkσjk = 0
Thus taking i = 1, 2, 3 in turn we obtained
σ = σT
9.2 Principal stresses and principal directions
Let σ(x, t) be the stress at a particular point. Let there exists direction n such that
stress vector t(n) = σT n = σn is parallel to n. Thus
σn = σn
The values σ is called principal stresses and the corresponding directions n are called
the principal directions. Also the plane perpendicular to n is called principal stress
plane. Since σ is symmetric, there exists three mutually perpendicular directions
and three principle stresses.
9.3 Cauchy-Stokes decomposition theorem
Let us consider the spatial distribution of velocity v in two neighbouring points x0
and x. Using Taylor series (retaning only linear term and writing dx = x− x0) we
can write
dv = bv(x, t)− x(x0, t) = L dx = D dx + W dx

14
Now let ds be the length of line element between x0 and x. Then
ds2 = dx · dx = F dX · F dX = dX · F T F X
Now
D
Dt(ds2) = dX · D
Dt(F T F )dX
= dX · (F TF + F T F )dX (DP/Dt denoted by P )
= dX · (F T LT F + F T LF )dX
= F dX · (LT + L)F dX
= 2dx ·Ddx
Thus we have1
ds
D ds
Dt= Dij
dxi
ds
dxj
ds= Dijninj
Since D is real and symmetric and therefore has three real eigen values and three
mutually orthogonal eigen vectors. Thus under the action of this term three in-
finitesimal fluid parcels resembling slender needles that are initially aligned with the
eigen vectors will elongate or compress in their respective directions while remaining
orthogonal to each other. Thus a spherical fluid parcels with its three axes aligned
with the eigen vectors will deform (ellipsoidal), increasing or decreasing the the as-
pect ratios while maintaining its original directions. Thus D represents deformation
that preserves parcels orientation. To interpret vorticity, we note that the second
term of can be written as
Ω ∧ dx
where Ω = ω/2. Thus under the action of this term the point particles rotate about
the point x0 with angular velocity that is equal to the half the vorticity of the fluid.
Thus the vorticity vector is parallel to the angular velocity of the point particles
and is equal to the twice the angular velocity of the point particles.
Thus the most general differential motion of a fluid element corresponds to a
uniform translation, plus a rigid rotation plus a distortion.
The following proof shows how a spherical fluid parcel deforms into a ellipsoid Con-
sider a small sphere of radious dr at time t. Let the axis be the principal axes of D.
Let the particles on the sphere of center x is x+n dr where n is a unit vector. The
material coordinate of the center and the point on the spehre are X and X + dX.
Thus
nidr =
(∂xi
∂Xj
)t
dXj

15
In the interval from t to t+ dt the center moves from x(X, t) to x(X, t+ dt). If dy
is the relative position of the of a particle on the surface relative to the center, then
we have
dyi = xi(X + dX, t+ dt)− xi(X, t+ dt) =
(∂xi
∂Xj
)t+dt
dXj
Now (∂xi
∂Xj
)t+dt
=
(∂xi
∂Xj
)t
+ dtD
Dt
(∂xi
∂Xj
)t
=
(∂xi
∂Xj
)t
+ dt
(∂vi
∂Xj
)We can also write the first relation (using inverse mapping) as
dXj =
(∂Xj
∂xk
)t
nkdr
Thus we get
dyi = nidr +
(∂vi
∂Xj
)dXjdt
= nidr +
(∂vi
∂Xj
) (∂Xj
∂xk
)t
nkdrdt
= nidr +
(∂vi
∂xk
)nkdrdt = Aiknkdr
where due to principal axes of D
Aii = 1 +Diidt, i = k no sum
and
Aik =1
2(vi,k − vk,i), i 6= k
The off diagonal term represent rigid rotation. In the absence of rotation we have
since ni are unit vector,
1 =dyi dyi
(1 +Diidt)2dr2
and this is an infinitesimal ellipsoid whose axes are concident with the principal
axes of stretching of length (1 +Diidt)dr, i = 1, 2, 3 (no sum). Thus in the complete
deformation, a small sphere is distorted into an ellipsoid and rotated.

16
10 Constitutive equations
10.1 Stokesian Fluid
A Stokesian fluid satisfies the following assumption
I. The stress tensor is a continuous function of the rate of strain tensor Dij and
local thermodynamic state but independent of other kinematical quantities.
II. The fluid is homogeneous i.e. σij does not depend explicitly on x
III. The fluid is isotropic, i.e. there is no preferred direction.
IV. When there is no deformation (Dij = 0) the stress is hydrostatic i.e. σij =
−pδij
The first assumption implies that relation between stress and strain is independnt of
the rigid body rotation by Wij. The thermodynamic variables, for example, pressure
and temperature, will be carried along throughout the discussion without specific
mention. Due to homogeneous nature the stress tensor depend on position through
the variation of Dij. The third assumption is isotropy and we first show that it
implies that the principal direction of two tensors concide. To express isotropy as
an equation we write σij = fij(Dij), then if there is not preferred direction, we also
have σij = fij(Dij). Let us write
σij = −pδij + τij
where τij is also isotropic and vanish when there is no deformation.
Since τ is isotrpic we must have
τ (QDQT ) = Qτ (D)QT
Choose the coordinate axes as the principal axes of D. Then in this coordinate we
have
[Dij] =
D1 0 0
0 D2 0
0 0 D3
and
τij = τij(D1, D2, D3)

17
Choose Q as
[Qij] =
1 0 0
0 −1 0
0 0 −1
Then Dij = Dij and
[τij] =
τ11 −τ12 −τ13
−τ12 τ22 τ23
−τ13 τ23 τ33
Using τij = τij we get σ12 = σ13 = 0. Similarly we can show that σ23 = 0. Thus
both the D and τ are diagonal matrix and and hence same principal axes. Thus we
have
τ11 = τ1 = F (D1, D2, D3), τ22 = τ2 = F2(D1, D2, D3), τ33 = τ3 = F3(D1, D2, D3)
Next choose Q as
[Qij] =
0 1 0
0 0 1
1 0 0
Now we have
[Dij] =
D2 0 0
0 D3 0
0 0 D1
[τij] =
τ2 0 0
0 τ3 0
0 0 τ1
Thus we have
F (D2, D3, D1) = F2(D1, D2, D3)
F2(D2, D3, D1) = F3(D1, D2, D3)
F3(D2, D3, D1) = F (D1, D2, D3)
Hence τ1, τ2, τ3 can be expressed as a single function F (D1, D2, D3) as
τ1 = F (D1, D2, D3), τ2 = F (D2, D3, D1), τ3 = F (D3, D1, D2)
Finally choose Q as
[Qij] =
0 1 0
1 0 0
0 0 1

18
Then we have
[Dij] =
D2 0 0
0 D1 0
0 0 D3
[τij] =
τ2 0 0
0 τ1 0
0 0 τ3
Thus we have
F (D2, D1, D3) = F (D2, D3, D1), F (D1, D3, D2) = F (D1, D2, D3)
Now the equations
α+ βD1 + γD21 = F (D1, D2, D3)
α+ βD2 + γD22 = F (D2, D3, D1)
α+ βD3 + γD23 = F (D3, D1, D2)
give solutions of α, β, γ as functions of D1, D2, D3. Also since F (D1, D2, D3) has
symmetry, the above solutions are unaltered if any pair of D1, D2 and D3 are in-
terchanged. Hence α, β and γ are symmetric functions of D1, D2, D3. Hence α, β, γ
can be expressed as functions of
D1 +D2 +D3 = I1
D1D2 +D2D3 +D3D1 = I2
D1D2D3 = I3
Also we haveτ1 0 0
0 τ2 0
0 0 τ3
= α
1 0 0
0 1 0
0 0 1
+ β
D1 0 0
0 D2 0
0 0 D3
+ γ
D2
1 0 0
0 D22 0
0 0 D23
Multiplying from left with Q and from right with QT we get
Q
τ1 0 0
0 τ2 0
0 0 τ3
QT = α
1 0 0
0 1 0
0 0 1
+ βQ
D1 0 0
0 D2 0
0 0 D3
QT
+γQ
D1 0 0
0 D2 0
0 0 D3
QTQ
D1 0 0
0 D2 0
0 0 D3
QT

19
which gives
τij = αδij + βDij + γDikDkj
Thus
σij = (−p+ α)δij + βDij + γDikDkj
Here p depends on the thermodynamic state but α, β, γ depend as well on the
invariants of the tensor. If the fluid is compressible, the thermodynamic pressure is
well defined and we take p equal to this. Then by forth assumption we must have
α = 0. If the fluid is incomprssible, the thermodynamic pressure is not defined and
pressure has to be taken as one of the fundamental dynamic variables. In this case
we absorb α into pressure p and write
σij = −pδij + βDij + γDikDkj
which ensures that σ reduces to hydrostatic form when the deformation vanishes.
10.2 Newtonian Fluid
A Newtonian fluid is linear Stokesian fluid i.e. the stress component depends linearly
on the rates of strain tensor. Writing
σij = −pδij + τij
the Newtonian fluid is given by the following relations (express in terms of principal
axes)
τ1 = a11D1 + a12D2 + a13D3
τ2 = a21D1 + a22D2 + a23D3
τ3 = a31D1 + a32D2 + a33D3
Due to isotropy, any permutation of D’s will affect the same permutation of τ ’s.
Now permute D1, D2, D3 to D3, D1, D2 and rearrange to obtain
τ3 = a12D1 + a13D3 + a11D3
τ1 = a22D1 + a23D2 + a21D3
τ2 = a32D1 + a33D2 + a31D3
Comparing these two sets of equations; for example
τ1 = a11D1 + a12D2 + a13D3 = a22D1 + a23D2 + a21D3

20
gives a11 = a22, a12 = a23, a13 = a21
Doing this for all and for the sets of equation obtain by permuting D1, D2, D3 to
D2, D3, D1 we find
a11 = a22 = a33 = λ+ 2µ
a12 = a21 = a23 = a32 = a13 = a31 = λ
Thus
τi = λ(D1 +D2 +D3) + 2µDi = λtr(D) + 2µDi
Transforming to a general coordinate system we get
τij = λtr(D)δij + 2µDij
Hence
σij = −pδij + λ(∇ · v)δij + 2µDij
11 Fluids
A fundamental characteristic of any fluid is that the action of shear stresses, no
matter how small they might be, will cause the fluid to deform continuously as long
as the shear stresses act. Thus a fluid at rest the stress vector on any plane is normal
to that plane. Thus every plane is a principal plane and consequently every direction
is an eigen vector of the stress tensor. If n1 and n2 are two arbitrary directions and
σ1 and σ2 are two eigen values then
σn1 = σ1n1 and σn2 = σ2n2
Since
n1 · σn2 = n2 · σn1
we get
(σ1 − σ2)n1 · n2 = 0
Since n1 and n2 arbitrary, we have σ1 = σ2 = −p. Hence we write
σ = −pI or σij = −pδij
The sclar p is the magnitude of the compressive normal stress and is known as
hydrostatic pressure.

21
12 Compressible and Incompressible Fluids
We define an incompressible fluid to be the one for which the density of every
particle remains the same at all times regardless of the state of stress. Thus for an
incompressible fluidDρ
Dt= 0
It then follows that
div v = 0
An incompressible fluid need not have a spatially uniform density. If the density is
also uniform, it is referred to as homogeneous fluid for which ρ is constant every-
where.
The compressible fluids are those for which the density change appreciably with
pressure.
13 Equations of hydrostatics
The term hydrostatic refers to the study of fluid at rest i.e. v = 0. Thus with
σij = −pδij the equilibrium equations become
∂p
∂xi
= ρbi or grad p = ρb
In case the only force acting on the body is the force of gravity, then with x3-axis
pointing upwards, we get
∂p
∂x1
= 0
∂p
∂x2
= 0
∂p
∂x3
= −ρg
This shows that the pressure p is independnt of x1 and x2. In case of homeogeneous
fluid i.e. (constant density) we further get
p = −ρgx3 + p0
where p0 is a constant.

22
14 Newtonian fluid
Since the state of stress for a fluid under rigid body motion (including rest) is given
by isotropic, it is natural to decompose the stress tensor into two parts
σij = −pδij + τij
where the values of τij depends on the rate and /or higher rates of deformation
such that they are zero when the fluid is under rigid body motion (i.e. zero rates
of deformation) and p is a scalar whose value does not depend explicitly on these
rates.
We idealized the fluid as a Newtonian fluid if
a. The values of τij at any time t depend linearly on the componenets of rate of
deformation tensor
Dij =1
2(vi,j + vj,i)
at that time and not on any other kinematic quantities.
b. The fluid is isotropic
Following the same argument as the linear isotropic solid we get
τij = λDk,kδij + 2µDij
where λ and µ are called viscosity coefficient.
For a fluid under rigid body motion (i.e. zero rate of deformation) we have
p = −1
3σii,
i.e. pressure is the total compressive normal stress on any plane as well as the mean
of the normal stresses. But in this case we have
−p+ (λ+ 2µ/3)Dkk = −1
3σii
where k = λ + 2µ/3 is known as coefficient of bulk viscosity. It is clear that when
Dij are non zero, p is neither the total compressive normal stress on any plane unless
the viscous componenets happen to be zero as well as is not the mean of the normal
stresses. Thus we can interpret pressure such that −pδij is that part of σij which
does not depend explicitly on the rate of deformation.
23
If we enforce the condition that the pressure is mean of the compressive normal
stresses, we must have
λ = −2µ/3
which is called Stoke’s condition. Thus choosing µ as the only scaler constant we
write
σij = −pδij + 2µ
(Dij −
1
3Dkkδij
)
15 Law of conservation of energy
The law states that the material derivative of kinetic plus internal energies is equal
to the sum of the rate of work of the surface and body forces, plus all other energies
that enter and leave the body per unit time. Other enrgies may include thermal,
electrical, magnetical etc. Here we only cosidered mechanical and thermal ener-
gies. Let e be the specific internal energy or internal energy per unit mass. The
conservation of energy is stated as
D
Dt
∫V
ρ
(e+
1
2vivi
)dv =
∫V
ρbivi dv +
∫S
t(n)i vi dS +
∫V
ρ r dv −∫
S
qini dS
where r is specific rate at which heat is produced by internal sources and q is the
heat flux vector. Now the term on the left hand side can be written as
D
Dt
∫V
ρ
(e+
1
2vivi
)dv
=
∫V
(ρDe
Dt+ viρ
Dvi
Dt
)dv
=
∫V
(ρDe
Dt+ vi(ρbi + σij,j)
)dv
=
∫V
(ρDe
Dt+ ρvibi + (σijvi), j − σijvi,j
)dv
=
∫V
(ρDe
Dt+ ρvibi − σijDij
)dv +
∫S
t(n)i vi dS
Hence we have ∫V
ρDe
Dtdv =
∫V
σijDijdv +
∫V
ρr dv −∫
V
∇ · q dv
Since the volume V is arbitrary we get
ρDe
Dt= σijDij + ρr −∇ · q

24
The term σijDij is called stress power. For Newtonian Viscous fluid we can explicitly
calculate the stress power. We have
σijDij = (−pδij + τij)Dij = −p∇ · v + Φ
where Φ is the dissipation function. The function Φ is positive definite since we have
Φ = 2µ
(Dij −
1
3(∇ · v)δij
)Dij = 2µ
(DijDij −
1
3(∇ · v)2
)= 2µ
(Dij −
1
3(∇ · v)δij
)2
> 0
Alternative form of energy equation is also possible using definition of enthalpy
h = e+p
ρ
We haveDh
Dt=De
Dt+
1
ρ
Dp
Dt− p
ρ2
Dρ
Dt
Thus we have
ρDh
Dt=Dp
Dt+ Φ +∇ · q
We may relate the heat flux to temperature by Fourier’s law as
qi = −κT,i
Then we get
ρDh
Dt=Dp
Dt+ Φ + (κT,i),i
To close the system we use (i) a thermodynamic equation like e = e(T, p), the
simplest being e = cvT or h = cpT and (ii) equation of state p = ρRT
16 Navier Stokes Equation
These equations describe the conservation of mass, momentum and energy. These
are
Dρ
Dt+ ρvk,k = 0
ρDvi
Dt= −p,i + τij,j + ρbi
ρDe
Dt= −pvk,k + Φ + (κT,i),i

25
where
τij = µ
(vi,j + vj,i −
1
3vk,kδij
)Φ = τijDij = τijvi,j
These are supplemented with the thermodynamic relation and equation of state of
a gas
e = e(T, p)
p = ρRT
These gives seven equations in seven unknowns ρ, p, T, vi, e.
17 Incompressible Navier Stokes Equation
For incompressible flow we shall always treat flow with density constant (tecnically
not most general!). For an incompressible fluid Dkk = 0. Thus we have
σij = −pδij + 2µDij
and we now have p = −σii/3 which has the meaning of mena normal compressive
stress. Substituting into the equations of motion
ρ
(∂vi
∂t+ vj
∂vi
∂xj
)= ρbi +
∂σij
∂xj
which upon simplification gives
ρ
(∂vi
∂t+ vj
∂vi
∂xj
)= ρbi −
∂p
∂xi
+ µ∂2vi
∂xj∂xj
In componentwise we write the above as
ρ
(∂v1
∂t+ v1
∂v1
∂x1
+ v2∂v1
∂x3
+ v3∂v1
∂x3
)= ρb1 −
∂p
∂x1
+ µ
(∂2
∂x21
+∂2
∂x22
+∂2
∂x23
)v1
ρ
(∂v2
∂t+ v1
∂v2
∂x1
+ v2∂v2
∂x3
+ v3∂v2
∂x3
)= ρb2 −
∂p
∂x2
+ µ
(∂2
∂x21
+∂2
∂x22
+∂2
∂x23
)v2
ρ
(∂v3
∂t+ v1
∂v3
∂x1
+ v2∂v3
∂x3
+ v3∂v3
∂x3
)= ρb3 −
∂p
∂x3
+ µ
(∂2
∂x21
+∂2
∂x22
+∂2
∂x23
)v3
There are four unknowns v1, v2, v3 and p in the three equations. The fourth equation
is supplied by the condition on incompressibility i.e. mass conservation div v = 0
i.e.∂v1
∂x1
+∂v2
∂x2
+∂v3
∂x3
= 0

26
These four equations are called Navier Stokes equations of motion for a incompress-
ible fluid. Since the energy equations decouple from the mass conservation and
momentum equations and energy equation need to be solved only when we need
temperarure. For energy equation we have
ρDe
Dt= −pvk,k + Φ + (κT,i),i
Almost always safe to assume that Φ 1. And since the fluid is incompressible we
have (using e = cvT )
ρcvDT
Dt= (κT,i),i
The Navier-Stokes equation in invariant form can be written as
ρ
[∂v
∂t+ (grad v)v
]= ρb− grad p+ µ div (grad v)T
div v = 0
18 Cylindrical coordinate
To derive equations in cylindrical coordinate we need to have the expressions for
gradf , gradv and divA for scalar, vector and tensor fields f,v and A respectively.
Let (r, φ, z) is the cylindrical coordinate with unit base vectors er, eφ, ez. These can
be expressed in terms of cartesian vectors e1, e2, e3 as
er = cosφe1 + sinφe2
eφ = − sinφe1 + cosφe2
ez = e3
From these we get der = dφeφ and deφ = −dφer. From the position vector r =
rer + zez we get
dr = drer + rdφeφ + dzez
18.1 Componennts of gradf
From definition we have
df = (gradf) · dr = [(gradf)rer + (gradf)φeφ + (gradf)zez] · [drer + rdφeφ + dzez]
= (gradf)rdr + (gradf)φrdφ+ (gradf)zdz

27
From calculas
df =∂f
∂rdr +
∂f
∂φdφ+
∂f
∂zdz
Comparing we get
gradf =∂f
∂rer +
1
r
∂f
∂φeφ +
∂f
∂zez
18.2 Components of gradv
We have
v(r, φ, z) = vr(r, φ, z)er + vφ(r, φ, z)eφ + vz(r, φ, z)ez
Fron the definition we have
dv = (gradv)dr = (gradv)(drer + rdφeφ + dzez)
= dr(gradv)er + rdφ(gradv)eφ + dz(gradv)ez
Now
(gradv)er = (gradv)rrer + (gradv)φreφ + (gradv)zrez
(gradv)eφ = (gradv)rφer + (gradv)φφeφ + (gradv)zφez
(gradv)ez = (gradv)rzer + (gradv)φzeφ + (gradv)zzez
Thus
dv = [(gradv)rrer + (gradv)φreφ + (gradv)zrez]dr
+ [(gradv)rφer + (gradv)φφeφ + (gradv)zφez]rdφ
+ [(gradv)rzer + (gradv)φzeφ + (gradv)zzez]dz
Now
dv = dvrer + vrder + dvφeφ + vφdeφ + dvzez
Also from calculas
dvr =∂vr
∂rdr +
∂vr
∂φdφ+
∂vr
∂zdz
dvφ =∂vφ
∂rdr +
∂vφ
∂φdφ+
∂vφ
∂zdz
dvr =∂vz
∂rdr +
∂vz
∂φdφ+
∂vz
∂zdz

28
Using these we get
dv =
[∂vr
∂rdr +
(∂vr
∂φ− vφ
)dφ+
∂vr
∂zdz
]er +
[∂vφ
∂rdr +
(∂vφ
∂φ+ vr
)dφ+
∂vφ
∂zdz
]eφ
+
[∂vz
∂rdr +
∂vz
∂φdφ+
∂vz
∂zdz
]ez
Comparing the above two form we get gradv in matrix form as
[gradv] =
∂vr
∂r
1
r
(∂vr
∂φ− vφ
)∂vr
∂z∂vφ
∂r
1
r
(∂vφ
∂φ+ vr
)∂vφ
∂z∂vz
∂r
1
r
∂vz
∂φ
∂vz
∂z
18.3 divv
Using definiton
divv = tr(gradv) = (gradv)rr + (gradv)φφ + (gradv)zz
=∂vr
∂r+
1
r
(∂vφ
∂φ+ vr
)+∂vz
∂z
18.4 Curl v
The antisymmetric part of gradv in matrix form is
[gradv]A =
0
1
2
(1
r
∂vr
∂φ− vφ
r− ∂vφ
∂r
)1
2
(∂vr
∂z− ∂vz
∂r
)−1
2
(1
r
∂vr
∂φ− vφ
r− ∂vφ
∂r
)0
1
2
(∂vφ
∂z− 1
r
∂vz
∂φ
)−1
2
(∂vr
∂z− ∂vz
∂r
)1
2
(∂vφ
∂z− 1
r
∂vz
∂φ
)0
Since curl is twice the dual vector of antisymmetric part of gradv, we have
Curlv =
(1
r
∂vz
∂φ− ∂vφ
∂z
)er +
(∂vr
∂z− ∂vz
∂r
)eφ +
(vφ
r+∂vφ
∂r− 1
r
∂vr
∂φ
)ez
18.5 Components of divA
We use the identity
div(Av) = (divA) · v + tr(grad(v)A)

29
To get component along er we take v = er. Thus we have
(divA)r = (divA) · er = div(Aer)− tr(grad(er)A)
= div(Arrer + Aφreφ + Azrez)− tr(grad(er)A)
=∂Arr
∂r+
1
r
∂Aφr
∂φ+∂Azr
∂z+Aφφ
r
=∂Arr
∂r+
1
r
∂Aφr
∂φ+∂Azr
∂z+Arr − Aφφ
r
Similarly
(divA)φ =∂Arφ
∂r+
1
r
∂Aφφ
∂φ+∂Azφ
∂z+Aφr + Arφ
r
and
(divA)z =∂Arz
∂r+
1
r
∂Aφz
∂φ+∂Azz
∂z+Arz
r
19 Navier Stokes equations in cylindrical coordi-
nates
The continuity equation takes the form
1
r
∂
∂r(rvr) +
1
r
∂vφ
∂φ+∂vz
∂z= 0
and the linear momentum equations are given by
∂vr
∂t+ vr
∂vr
∂r+vφ
r
∂vr
∂φ+ vz
∂vr
∂z−v2
φ
r= −1
ρ
∂p
∂r+ br +
µ
ρ
[∂2vr
∂r2+
1
r2
∂2vr
∂φ2
+∂2vr
∂z2+
1
r
∂vr
∂r− 2
r2
∂vφ
∂φ− vr
r2
]∂vφ
∂t+ vr
∂vφ
∂r+vφ
r
∂vφ
∂φ+ vz
∂vφ
∂z+vrvφ
r= − 1
ρr
∂p
∂φ+ bφ +
µ
ρ
[∂2vφ
∂r2+
1
r2
∂2vφ
∂φ2
+∂2vφ
∂z2+
1
r
∂vφ
∂r+
2
r2
∂vr
∂φ− vφ
r2
]∂vz
∂t+ vr
∂vz
∂r+vφ
r
∂vz
∂φ+ vz
∂vz
∂z= −1
ρ
∂p
∂z+ bz +
µ
ρ
[∂2vz
∂r2+
1
r2
∂2vz
∂φ2+∂2vz
∂z2+
1
r
∂vz
∂r
]

30
20 Navier Stokes equations in spherical coordi-
nates
The continuity equation takes the form
∂vr
∂r+
2vr
r+
1
r
∂vθ
∂θ+
1
r sin θ
∂vφ
∂φ= 0
and the linear momentum equations are given by
∂vr
∂t+ vr
∂vr
∂r+vθ
r
∂vr
∂θ+
vφ
r sin θ∂vr
∂φ−v2θ
r−v2φ
r= −1
ρ
∂p
∂r+ br +
µ
ρ
[∂2vr
∂r2+
1r2∂2vr
∂θ2
+1
r2 sin2 θ
∂2vr
∂φ2+
2r
∂vr
∂r− 2vr
r2+
cot θr2
∂vr
∂θ− 2r2∂vθ
∂θ− 2vθ cot θ
r2− 2r2 sin θ
∂vφ
∂φ
]∂vθ
∂t+ vr
∂vθ
∂r+vθ
r
∂vθ
∂θ+
vφ
r sin θ∂vθ
∂φ+vrvθ
r−v2φ cot θr
= − 1ρr
∂p
∂θ+ bθ +
µ
ρ
[∂2vθ
∂r2
+1r2∂2vθ
∂θ2+
1r2 sin2 θ
∂2vθ
∂φ2+
2r
∂vθ
∂r− vθ
r2 sin2 θ+
cot θr2
∂vθ
∂θ+
2r2∂vr
∂θ− 2 cot θr2 sin θ
∂vφ
∂φ
]∂vφ
∂t+ vr
∂vθ
∂r+vθ
r
∂vφ
∂θ+
vφ
r sin θ∂vφ
∂φ+vrvφ
r+vθvφ cot θ
r= − 1
ρr sin θ∂p
∂φ+ bφ +
µ
ρ
[∂2vφ
∂r2
+1r2∂2vφ
∂θ2+
1r2 sin2 θ
∂2vφ
∂φ2+
2r
∂vφ
∂r−
vφ
r2 sin2 θ+
cot θr2
∂vφ
∂θ+
2r2 sin2 θ
∂vr
∂φ+
2 cot θr2 sin θ
∂vθ
∂φ
]
21 Exact Solutions
21.1 Couette Flow
For steady flow in the absence of body forces the Navier-Stokes equation reduce to
ρ(∇v)v = µ∇ · ((∇v)T )−∇p
∇ · v = 0
Consider the plane velocity field
v(x) = v1(x1, x2)e1
Now the mass conservation implies that
∂v1∂x1
= 0

31
so that v1 = v1(x2). Further the matrix of ∇v is
[∇v] =
0
∂v1∂x2
0
0 0 0
0 0 0
Thus ∇ · v = 0 and (∇v)v = 0. Thus the equation of motion reduces to
µ∂2v1∂x2
2
=∂p
∂x1,
∂p
∂x2=
∂p
∂x3= 0
This implies that p = p(x1). Also
∂
∂x1
(∂p
∂x1
)= µ
∂2
∂x22
∂v1∂x1
= 0
. This implies that ∂p/∂x1 is a constant. We now consider two speicfic cases consistent
with the above flow.
Problem 1 (Plane Couette Flow). Consider the flow between two infinite flat plates, one
at x2 = 0 and one at x2 = h. The bottom plate is stationary and the top plate is moving
in the x1 direction with velocity v. Thus the boundary conditions are
v1(0) = 0, v1(h) = v
Let us assume that ∂p/∂x1 = 0 i.e. p = constant. Thus we have
v1 = α+ βx2
Using the boundary condition we get
v1 = vx2/h
The stress components are
σ11 = σ22 = σ33 = −p, σ12 = σ21 = µv/h
Thus the force per unit area exerted by the fluid on the top plate has a normal component
p and a tangential component µv/h. This fact furnishes a method of determining the
viscosity of a fluid.
Problem 1 (Plane Poiseuille Flow). Now the two plates are fixed in space. Then the
relevent boundary conditions are
v1(0) = v1(h) = 0
If the presuure is constant then velocity field would be identically zero. We therfore allow
pressure drop. In particular let
∂p/∂x1 = −δ

32
with δ (the pressure drop per unit length) constant. Now the solution is given by
v1 = −δx22
2µ+ α+ βx2
which using the boundary condition gives
v1 =δx2
2µ(h− x2)
and the velocity distribution is parabolic. Also the stress components are given by
σ11 = σ22 = σ33 = −p, σ12 = σ21 = δ(h/2− x2)
Thus the shearing stresses are maximum at the wall and vanishes at the centre. The
volume discharge Q through a cross section is
Q =∫ h
0v1dx2 = h3δ/12µ
Since the dischage can be easily measured as well as the pressure drop, this formula yields
a convenient method of determing the viscosity.
Problem 1 (General Couette Flow). In this case either of the two surfaces is moving at
constant speed and there is also external pressure gradient. The solution can be obtained
by superimposing the two solutions obtined earlier since the governing equations are linear.
Thus we get
v1 = vx2/h+δx2
2µ(h− x2)
If δ > 0 then the pressure gradient will assist the motion induced by the upper surface.
On the other hand it will resist the induced motion if δ < 0. In this case we may have
reverse flow near the lower surface.
21.2 Poiseuille Flow
The steady flow of viscous fluid in a pipe of arbitrary but constant cross section is referred
to as Poiseuille flow. Let the cross section is in the xy plane and the steady flow is in the
z direction.
Since the flow is unidirectional, we have v = (0, 0, w). Now equation of mass conser-
vation gives∂w
∂z= 0 =⇒ w = w(x, y)
Thus (∇v)v = 0. The equation of motion reduces to
−∇p+ µ∇2v = 0
33
z
x
z
x
z
x
y
x
y
x
y
x
a
b
c
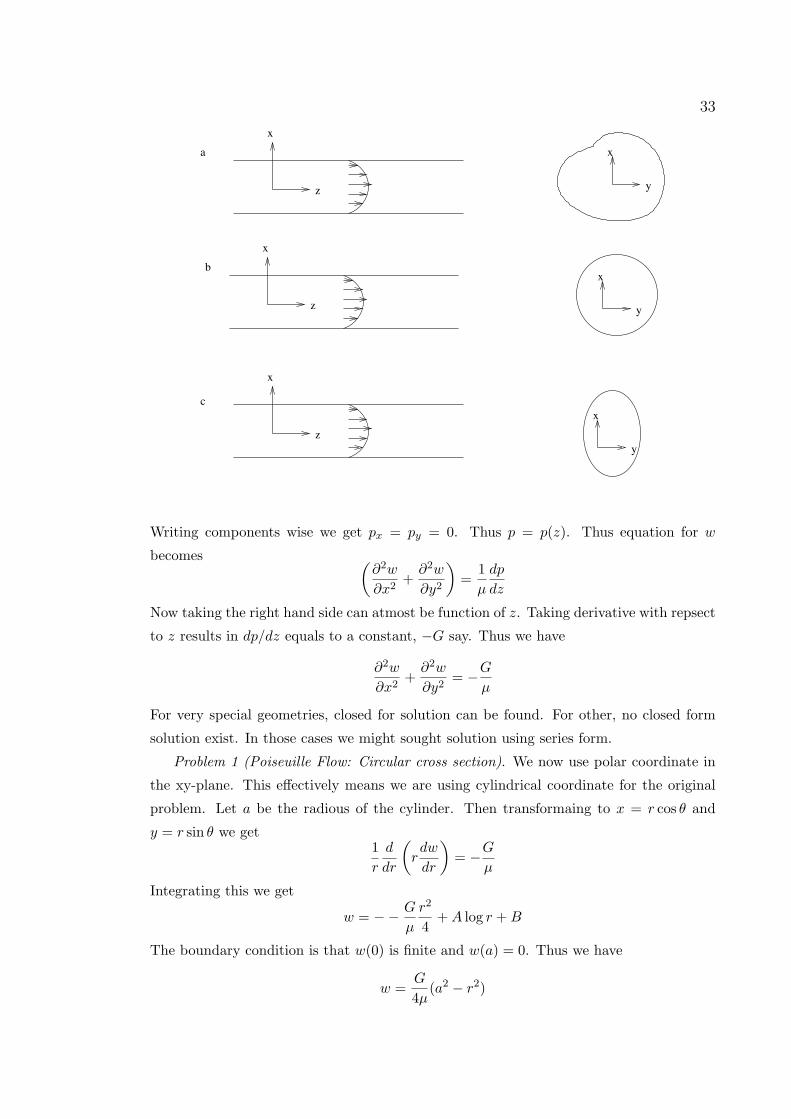
Writing components wise we get px = py = 0. Thus p = p(z). Thus equation for w
becomes (∂2w
∂x2+∂2w
∂y2
)=
1µ
dp
dz
Now taking the right hand side can atmost be function of z. Taking derivative with repsect
to z results in dp/dz equals to a constant, −G say. Thus we have
∂2w
∂x2+∂2w
∂y2= −G
µ
For very special geometries, closed for solution can be found. For other, no closed form
solution exist. In those cases we might sought solution using series form.
Problem 1 (Poiseuille Flow: Circular cross section). We now use polar coordinate in
the xy-plane. This effectively means we are using cylindrical coordinate for the original
problem. Let a be the radious of the cylinder. Then transformaing to x = r cos θ and
y = r sin θ we get1r
d
dr
(rdw
dr
)= −G
µ
Integrating this we get
w = −− G
µ
r2
4+A log r +B
The boundary condition is that w(0) is finite and w(a) = 0. Thus we have
w =G
4µ(a2 − r2)

34
The maximum velocity occurs at r = 0 and
wmax =G
4µa2
The same solution could be obtained if we had guessed the solution in the form
w(x, y) = α(x2 + y2 − a2)
Note that this satisfies the boundary condition and the constant α is obtained by substi-
tuting this in the momentum equation for w.
The flux through the pipe is given by
Q =∫ 2π
0
∫ a
0w r dr dθ =
πGa4
8µ
The mean flow velcity is
wav =Flux
Areaofcrosssection=Ga2
8µ
Problem 2 (Poiseuille Flow: Elliptic cross section). Let us assume the axial velocity
of the form
w(x, y) = α
(x2
a2+y2
b2− 1
)It satisfies the boundary condition. Direct substitution into the governing equations for
w gives
α = − G
2µa2b2
a2 + b2
Thus the velocity profile is given by
w(x, y) =G
2µa2b2
a2 + b2
(1−
[x2
a2+y2
b2
])Problem 3 (Poiseuille Flow: Rectangular cross section). Let the flow is confined within
the channel given by −a ≤ x ≤ a and −b ≤ y ≤ b. Thus the equation to be solved is
∂2w
∂x2+∂2w
∂y2= −G
µ
subhject to
w(±a) = w(±b) = 0
We look for solution in the separable form i.e. w(x, y) = X(x)Y (y) withX(±a) = Y (±b) =
0. Hence we choose w as
w(x, y) =∞∑
m=0
∞∑n=0
Amn cos[(2m+ 1)
πx
2a
]cos
[(2n+ 1)
πy
2b
]Where the constants Amn are to be found. These can be found by substituting into the
governing equations for w.

35
21.3 Flow down an inclined plane
Consider two dimensional flow of a fluid of height h down an inclined plane. Fix the
coordinate axes as shown in the figure. The boundary condition is that p = p0 at x = h
and no-slip at x = 0.
x
z
p0
α
h
We seek a steady solution of the w = w(x) which satisfy the equation of continuity
identically. The momentum equations are
0 = −∂p∂x− ρg sinα
0 = −∂p∂z
+ ρg cosα+ µd2w
dx2
From the first equation we get
p = −ρg sinαx+ f(z)
Now using p(x = h, z) = p0, we get f(z) = pa + ρg sinαh and hence
p = p0 + ρg sinα(h− x)
Substituting into the equation for w we get
d2w
dx2= −ρg cosα
µ
Integrating twice we get
w = −ρg cosα2µ
x2 +Ax+B
No-slip at x = 0 implies B = 0. If we neglect surface tension, then the stress vector at
x = h for the fluid and air will be same. Thus we have
σairij nj = σijnj , n = (1, 0, 0), i = 1, 2, 3
For i = 1 we get
σair11 = σ11 or − p0 + 2µairDair
11 = −p+ 2µD11

36
which is satisfied identically. For i = 2 we get
σair21 = σ21 or 2µairDair
21 = 2µD21
This is also satisfied identically. For i = 3 we have
σair31 = σ31 or 2µairDair
31 = 2µD31
Since µair µ we have at x = h
D31 = 0 ordw
dx= 0 at x = h
This we used to get A and the solution w becomes
w =ρg cosα
2µx(2h− x)
The above solution can be written as
w =ρg cosα
2µ(h2 − (h− x)2)
From this we derive
wmax =ρg cosαh2
2µand Q =
ρg cosαh3
3µ
22 Exact Navier Stokes in cylindrical coordinate
We can make considerbale simplication by assuming that the flow is axisymmetric. This
means that nothing changes with θ thus ∂/∂θ = 0. For an axisymmetric flow with no
swirl we have
v = u(r, z, t)er + w(r, z, t)ez
and for an axisymmetric flow with swirl we have
v = u(r, z, t)er + v(r, z, t)eθ + w(r, z, t)ez
Problem (Steady axisymmetric swirl flow between coaxial cylinder). Fluid fills the annular
gap between two infinitely long coaxial cylinder. The angular velocity of the inner/outer
cylinders of radii a and b are Ω1 and Ω2 respectively. Since the swirl flow is steady and
the cylinders are infiniely long we have
v = v(r)eθ
The equation of continuity is automatically satisfied. The equations of motion are
−v2
r= −1
ρ
dp
dr
0 =d2v
dr2+
1r
dv
dr− v
r2

37
Solving for v gives
v = Ar +B/r
The boundary conditions are v = aΩ1 at r = a and v = bΩ2 at r = b. Using these we get
A =b2Ω2 − a2Ω1
b2 − a2b = a2b2
Ω2 − Ω1
a2 − b2
We also have for vorticity
ω = ∇∧ v = 2b2Ω2 − a2Ω1
b2 − a2ez
and is therefore constant. Now let us calculate the torque on the inner cylinder. To do
this first we calculate the Dθr which using the matrix of ∇v we get
Dθr = −Br2
Hence we get
σθr = −2µB/r2
Now n = er and we have
tn = σer = σrrer + σθreθ + σzrez
We are interested horizonal torque per unit vertical length. This will be given by azimulthal
component σθr. Now for the inner cylinder this torque is given by
τa =∫ 2π
0(a σθr|r=a) a dθ = −4πµB
Substituting the value of a we get
τa = −4πµa2b2Ω2 − Ω1
b2 − a2
Similar calculation for the outer cylinder gives
τb = −4πµa2b2Ω2 − Ω1
b2 − a2
Special cases
Equal rotation rate: In this case the Ω1 = Ω2 and in this case we have
v = Ω1r
Thus the fluid swirls as if it is a rotating rigid body and the couple on both the
cylinder vanish.

38
No inner cylinder: In this case a = 0 and we must have B = 0 to remove the
singularity. Again we have just a rigid body rotation
v = rΩ2
Stationary outer cylinder: We have Ω2 = 0 and we have
v
r=
a2Ω1
b2 − a2
(b2
r2− 1
)Letting b→∞ we get
v =a2Ω1
r
23 Unsteady unidirectional flow
For unsteady unidirectional flow we have to solve
v = we3, w = w(x, y, t),∂v
∂t= −∇p
ρ+ ν∇2v
As in the steady cases, we have
∂p
∂x=∂p
∂y= 0 =⇒ p = p(z, t)
23.1 Impulsively started plate
Consider a semi-infinite fluid resting above a rigid plane. For t < 0 the fluid is at rest. At
t = 0 the plane wall instanteneouly acuires a speed U in the z direction. Considering the
z
y
x
U

39
figure, it is clear that the flow variables must be independent of x and hence w = w(y, t).
Now the momentum equation along z direction gives
ρ∂w
∂t= −∂p
∂z+ µ
∂2w
∂y2
Now the above equation implying ∂p/∂z must be independent of z. Thus we have
p(y, z, t) = p0(y, t) + p1(y, t)z
Since pressure is boundend at z = ±∞ we must have p1(y, t) = 0 and hence ∂p/∂z = 0
Hence the equation reduces to∂w
∂t= ν
∂2w
∂y2
subject to the initial and boundary conditions
w(0, t) = U
w(y, t) → 0 as y →∞
w(y, 0) = 0
We get rid of the constant U by defining W = Uw thus reducing the problem to
∂W
∂t= ν
∂2W
∂y2
subject to the initial and boundary conditions
W (0, t) = 1
W (y, t) → 0 as y →∞
W (y, 0) = 0
Clearly we must have W = φ(ν, y, t).
Solution by Laplace transform: Taking Laplace transform on both sides we get
sW = νd2W
∂y2
subject to
W (0, s) =1s
W (y, s) → 0 as y →∞
The solution is
W = Aey√
s/ν +Be−y√
s/ν

40
Using the boundary conditions we get
W =e−y√
s/ν
s
The inverse transform gives
W (y, t) = erfc(η), where η =y
2√νt
where erfc(η) is defined by
erfc(η) = 1− 2√π
∫ η
0e−t2 dt = 1− erf(η)
Thus the solution is given by
u = U erfc(η), η =y
2√νt
Solution by Similarity: Since W is nondimensional and W = φ(y, ν, t), the function φ
must also be nondimensional. Since y, ν, t involve two independent dimension [L] and [T ]
only one independent nondimensional variable is possible. Let us take the nondimensional
variable as
η =y
2√νt
Thus let us choose
W = f(η)
Putting into the governing equations we have
f′′
= −2ηf′
The boundary conditions are
f(∞) = 0 f(0) = 1
We solve the above as
f ′ = Ae−η2
Integrating once again we get
f = B +A
∫ η
0e−η2
dη
Putting into boundary conditions we get B = 1 and A = −2/√π. Thus we have the same
solution.

41
If we plot the u/U versus η then we observe that u/U = 0.05 at η ≈ 1.4. Thus the
width of the boundary layer δ ≈ 2.8√νt. Thus the boundary layer (see later in the course)
increases as√t. The vorticity is given by
ω = ∇∧ v = − U
π√νte−
y2
4νt e1
Using Gamma function we can show that∫ ∞
0ω dy
is a constant vector for t > 0. Thus there is no new vorticity generated in the flow. The
vorticity at t = 0 due to impulsive start is simply diffuse away with time. And the voritcity
at time t is confined within the layer [0, 2√νt].
23.2 Oscillating flows
Consider the flow similar to the above but the plate is now oscillating with frequency ω.
The governing equations are∂w
∂t= ν
∂2w
∂y2
subject to the boundary conditions
w(0, t) = U cos(ωt)
w(y, t) → 0 as y →∞
We can remove the dependence on U by defining w = UW . Thus reduces the problem to
∂W
∂t= ν
∂2W
∂y2
subject to the boundary conditions
W (0, t) = cos(ωt)
W (y, t) → 0 as y →∞
Note that here W = φ(ν, y, t, ω) and φ must be function of two independent nondimen-
sional variable. Thus similarity solution is not possible. Since the frquency of the wall is
ω and the problem is linear, we assume that the frequency of the fluid flow w is also ω.
To solve let us assume that
W = Re(f(y)eiωt)
Substituting into the governing equations we get
f ′′ =iω
νf
42
subject to the boundary conditions
f(0) = 1 and f(y) → 0 as y →∞
Thus we have
f = Aeλy +Be−λy, λ =
√iω
ν
Now√i = (1 + i)/sqrt2 we must have A = 0. Using the other conditions gives B = 1.
Thus we have
f = e−√
ω/2ν(1+i)y
Hence
w = Ue−√
ω/2νy cos(ωt−
√ω/2νy
)The vorticity is given by
ω = ∇∧ v =∂w
∂ye1 = −U
√ω/νe−
√ω/2νy cos
(ωt−
√ω/2νy + π/4
)e1
Thus most of the vorticity is confined withing the a region of thickness√ν/ω. The higher
the frquence the thinner the layer. The wall shear stress is proportinal to
∂w
∂y
∣∣∣∣y=0
∝ cos(ωt)− sin(ωt) =√
2 cos(ωt+ π/4)
Thus there is a phase difference of π/4 between the wall velocity and wall shear.
24 Stagnation point flow
x
y
Consider the flow of a viscous fluid towards the wall as shown in the figure. Introducing
stream function we can write
u =∂ψ
∂y, v = −∂ψ
∂x

43
If we considered the fluid to be inviscid and irrotatinal, then the governing equations for
ψ is given by
∇2ψ = 0
subject to zero normal velocity at y = 0 i.e. v = 0 at y = 0 or equivalently ψ = 0 at y = 0.
The solution is
ψ = kxy
where k is a constant. Hence
u = kx, v = −ky
Clearly this equation do not satisfy the noslip condition at y = 0. Hence let us assume
solution of the inviscid form as
v = −f(y), u = xf ′(y)
This implies that f ′ → k as y → ∞. With this choice the mass conservation equation is
satisfied automatically. Now consider the y−momentum equation first. Putting the values
of u and v we get
py = −ρ(ff ′ + f ′′) = Q(y)
Hence
p = p(x) +R(y)
From the x−momentum equation we get
px = ρx(νf ′′′ + ff ′′ − f ′2)
Thus
p =ρx2
2(νf ′′′ + ff ′′ − f ′2) + S(y)
The two form for p implies that
νf ′′′ + ff ′′ − f ′2 = β
where β is a constant. Taking y → ∞ we get β = −k2. Also the boundary conditions at
y = 0 becomes f(0) = f ′(0) = 0. Thus the complete problem is given by
νf ′′′ + ff ′′ + k2 − f ′2 = 0
subject to
f(0) = f ′(0) = 0 at y = 0, f ′ → k as y →∞
The solution for the flow must be found numerically.





























