Embed Size (px)
Citation preview

1
Efficient Indoor Localization via Switched-beamAntennas
Yonglong Zhang and Konstantinos Psounis, Fellow, IEEE
Abstract—Location-based services have become extremely popular. As a result, indoor localization has received a lot of attentionfrom both industry and academia. Despite the plethora of existing approaches, no method can achieve high accuracy without major,expensive changes to existing systems. For example, to achieve good accuracy, fingerprinting methods require many APs within rangeof a client, time-of-arrival methods require tight synchronization, client hardware changes and line-of-sight, and direction-of-arrivalmethods require expensive antenna front ends and line-of-sight. In this paper we take advantage of inexpensive, off-the-shelfswitched-beam antennas (SBAs) to increase the diversity of measurements used for fingerprint-based localization. We show usingexperiments that a single AP equipped with n SBAs may infer equally rich localization information as n APs equipped with n
omnidirectional antennas each, as long as the SBAs are properly configured. We then establish via extensive experiments that a singlepacket reception from a commodity client at a single AP equipped with a handful of SBAs (e.g. 8 SBAs costing a couple of dollars morethan omni antennas) achieves localization accuracy in the order of half a meter with or without line-of-sight, in any indoor environment,with zero airtime overhead and zero client support.
F
1 INTRODUCTION
D ESPITE its huge market potential, indoor localizationstill remains an open problem today: in environments
like airports, shopping malls or office buildings, peoplewill often find themselves in need of navigation to get totheir destinations. This has to be done without using theGlobal Positioning System (GPS) since the GPS signal isgreatly attenuated by roofs. Motivated by this, in recentyears researchers in both academia and industry have comeup with numerous approaches to locate nodes, for exampleusing WiFi RF signals [1], [2], [3], [4], [5], [6], [7], [8],sensor network RF signals [9], [10], [11], [12], [13], [14], [15],[16], [17], [18], acoustic signals [19], [20], [21], [22], visiblelight [23], [24], the relative position information betweennodes [25], [26], [27], [28], [29], [30], and more. Amongthose works, positioning techniques based on WiFi signalshave attracted a lot of attention for indoor scenarios in theacademia and industry thanks to the enormous popularityof WLAN system in the past decades. A WiFi-based in-door positioning system can take advantage of the already-existing wireless infrastructure in the site, and thus posinglittle additional cost. Similarly, the users of the system canreceive the service via their WiFi-enabled device such assmartphones and tablets, at no additional cost either.
WiFi-based positioning mechanisms have certain short-comings. For example, time-of-arrival (ToA) [3], [6], [31],[32], [33] and direction-of-arrival (DoA) [34], [7], [35], [36]methods require a strong enough line-of-sight (LOS) signalcomponent between the access point (AP) and the user,which is often not the case in indoor environments thatcontain a lot of obstacles and partitions. Fingerprint-based
• Yonglong Zhang is with Ming Hsieh Department of Electrical Engineer-ing, University of Southern California, Los Angeles, CA, USA, 90089.Email: [email protected]
• Konstantinos Psounis is with Ming Hsieh Department of ElectricalEngineering, University of Southern California, Los Angeles, CA, USA,90089. Email: [email protected]
schemes [4], [5], [8], [37], [38], [39], [40], [41] don’t requireLOS, but require measurements from many different APsto get accurate results. Since the main reason of having aWLAN is for data transmission, there is no incentive tocover locations with multiple APs. What is more, multipleoverlapping APs may cause inter-cell interference harm-ing data rates. Last, many indoor positioning proposalsrequire the AP and/or user to perform operations that arenot defined in the current 802.11 standard, thus requiringhardware and/or software modifications on the user’s side.As a result, no WiFi-based indoor positioning system hasyet been widely accepted and implemented. Instead, theindustry has mostly settled for Bluetooth iBeacons to makerough proximity estimates.
In this paper, we propose a practical and powerfulfingerprint-based method for WiFi indoor positioning usingswitched-beam antennas (SBAs) in a manner that signifi-cantly improves the efficiency of the core fingerprint-basedapproach. SBAs are inexpensive1, compact antennas thatcan switch between some predefined directional modes. Byswitching the SBA to different directional modes, we canget multiple uncorrelated measurements from a given userusing only one AP rather than multiple APs located in differ-ent places. Furthermore, SBAs can be used to estimate theDoA of the signal using a variant of the well known MUSICalgorithm [44], [45]. While the resulting estimate is rough, itdirects fingerprinting to certain areas and further improvesthe localization accuracy. As a result, our method signif-icantly improves a fingerprint-based positioning system’slocalization accuracy, achieving half-meter level of accuracywith a single AP, with the reception of single packet froma commodity client, e.g. an ACK, without requiring line-of-sight, and while being fully compatible to the current 802.11
1. SBAs cost only a couple of dollars more than standard omniantennas and allow fingerprint-based localization improvements asdiscussed in this work, as well as better MIMO rates [42] and lowoverhead AP coordination capabilities [43].

2
standard. Note that this accuracy can be further improvedby using on top of our core system any of the fingerprinting“add-on” ideas found in the literature, see the related worksection for more details. Our main contribution consists ofsignificantly improving the accuracy and efficiency of thecore fingerprinting approach with almost no overhead andwith an easy path to industry adoption.
Like all fingerprint-based schemes, our approach re-quires the offline creation of fingerprint maps at deploymenttime and whenever there is a major change in the environ-ment [46]. The cost associated with the labor to performsuch on-site surveys should be considered when accessingthe total cost of fingerprint-based localization and there isa large body of work on reducing the cost of this offlinephase, see [47], [48], [49], [50] for recent ideas. Althoughit is beyond the scope of this work to propose ways tofurther reduce this cost, we do conduct experiments to showthat environmental changes pose at most the same level ofoverhead on our approach as it does on the traditional corefingerprint method.
Interestingly, in addition to using SBAs to improvefingerprinting-based localization, we also show how theincreased diversity from SBAs and the DoA informationthat they provide, can benefit not only fingerprinting-basedlocalization schemes but also other localization approachessuch that ToA ones.
The paper is organized as follows: Section 2 discussesprior work and Section 3 motivates the work by showingthe gain we get from SBAs comparing to ordinary omni-directional antennas. Section 4 describes how our methodworks in detail and Section 5 presents extensive experimen-tal results. Last, Section 6 discusses how the method can beimplemented in a 802.11 compatible manner with zero orvery little overhead, and Section 7 uses SBAs in the contextof ToA localization.
2 PRIOR WORK
There is a large body of work on indoor localization,mostly relying on Time-of-Arrival (ToA), Direction-of-Arrival (DoA), and fingerprint-based approaches. In thissection we mostly focus on papers in the context of WLANs.
Under ToA, see, for example, [51], [3], [6], [52], [53],an AP measures the “time-of-flight” of the wireless signalbetween a user and itself to estimate their distance. If atleast 3 APs measure their distance to the user, we canpredict the user’s location through triangulation. UnderDoA, see, for example, [7], an AP measures the angle ofthe arriving signal sent by the user, in order to estimatethe direction of the user’s location. As a result, the user’slocation can be projected if we obtain angles from two ormore APs. Despite often yielding good accuracy in theoryand testbeds, those two approaches have significant practi-cal/deployment drawbacks.
Under ToA, an inaccuracy as small as 3 nano secondswould cause an estimation error of 1 meter due to the speedof light. To get accurate timing measurements, researchershave proposed to tightly synchronize the clock between theAP and the user. However, those synchronization schemesare costly and often require hardware changes not only onthe AP but also on the client side, which means they won’t
be deployed anytime soon. Although systems based onDoA do not require such tight synchronization, they requireprecise DoA measurements which can only be obtained byexpensive antennas which are also too big for commercialAPs, e.g. phased-array antennas [54], [55]. Besides thoseissues, both ToA and DoA methods need line-of-sight (LOS),as a dominant multipath component may render ToA andDoA measurements very inaccurate leading to unusable lo-calization predictions. Since most indoor environments withreal world WiFi deployments have a plethora of non-LOSlocations, these methods cannot be used in most practicalsettings as is.
Motivated by this, the third major indoor positioningscheme called “fingerprinting”, see, for example, [4], [5],[8], [37], [38], [39], [40], [56] has attracted a lot of attention.Fingerprint-based localization systems involve two phases:during the offline phase vectors of received signal strengthindicator (RSSI) from APs are collected at many referencepoints whose locations are known, and, during the onlinephase, RSSI vectors from a user in an unknown location arecompared with the RSSI vectors of the known locations toestimate the most likely user location. The main issue withfingerprinting is that RSSI, and, more general, RF signalmeasurements are noisy and a large number of uncorrelatedmeasurements are required for high accuracy. The omniantennas of an AP yield highly correlated measurements,thus the need for many APs to collectively receive andprocess measurements to achieve good accuracy, which isalso impractical.
To improve fingerprinting many “add-on” techniqueshave been proposed [57], [58], [59], [60], [61], [62], [25],[26], [27], [63], [64], [65], [66], [67]. For example, in [58],[59], the authors take advantage of the sequence of RSSIdata collected along the user’s walking trajectory, and usethe patterns found in such temporal sequences to assistthe underlying localization process. In [60], [61], [62], theauthors notice that the WiFi signal shows unique patternsin certain locations, and use such “landmarks” to determinethe user’s location. Another idea is to use information on therelative positions between multiple users, taking advantageof WiFi end devices discovering other nearby devices, to im-prove the accuracy of the traditional fingerprint process [25],[26], [27]. Last, the motion sensors in today’s smartphonesprovide us with additional information like user’s walkingdirection and speed, allowing researchers to further increasethe fingerprinting accuracy [63], [64], [65], [66]. Our worksignificantly improves the core fingerprinting mechanismand could be then used with any such ideas to furtherincrease accuracy.
Last, researchers have been taking advantage of direc-tionality in fingerprinting systems by equipping APs withdirectional antennas [68], [69], which reduces the finger-prints’ correlation level and increases their dissimilarity,making it easier for the system to distinguish between dif-ferent locations. What is more, researchers have also imple-mented fingerprinting systems equipped with one antennaarray that localizes the client via signal subspace analysis[70]. Those findings further motivate our work, as we havemade consistent observations in our experiments which wewill discuss in the next section. Note however that unlikedirectional antennas which only have a fixed directional

3
Metal Obstacle
2m
2m
Test Point
Reference Points
AP with 8 antennas
8 APs with 1 antenna each
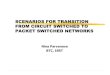
Fig. 1: Experiment using either one AP with 8 antennas or 8separate APs.
mode, or antenna arrays which cost a lot more than ordinaryantennas, SBAs bring a new degree of freedom and thus asizable improvement in localization performance with littleextra cost.
3 MOTIVATION
Despite all the add-on ideas for fingerprint-based localiza-tion, the core mechanism stays the same and requires a largenumber of independent, uncorrelated RSSI measurementsto achieve good accuracy. This, in turn, requires a densedeployment of APs such that uncorrelated measurementsare collected by different APs within range of each client.It should be clear to the reader than no business modelwould support the extra cost fo deploying 2-3x more denseAPs solely for the purpose of localization. What is more,considering the number of non-overlapping WiFi chan-nels available, a dense deployment may reduce the overallthroughput due to inter-cell interference.
Motivated by the shortcomings of existing approaches,our goal is to design and implement a practical WiFi-basedindoor localization mechanism that carries the followingproperties: (i) it yields accurate localization even with asingle AP, (ii) it is fully compatible with the current 802.11standard, (iii) it has little or no impact on the performanceof data transmissions, (iv) no hardware or software changeson the client’s side are required, and (v) any changes on theAP side are inexpensive and straightforward.
3.1 One AP is not enough
Previous fingerprinting methods involve collecting RSSImeasurements from multiple APs located at different loca-tions. Typically, the more APs there are, the higher accuracythe system can achieve. However, as discussed, larger num-ber of APs has its drawbacks. Our first experiment uses asingle AP equipped with up to 8 omni-directional antennas(one at each RF chain). As shown in the Fig. 1, we fix 27reference points on the floor with 33cm distance betweentwo adjacent points and place the AP close to these reference
0 0.5 1 1.5 2 2.5 3
Error in Meters
0
0.2
0.4
0.6
0.8
1
F(x
)
1 AP - 8 directional antennas
8 AP - 1 omni ant. each, 8 different locations
1 AP - 1 omni antenna
1 AP - 8 omni antennas
Random Guess
Fig. 2: Accuracy with omni and directional antennas.
points, resulting in two thirds of the area having line-of-sight towards the AP. We pick test points randomly aroundreference points as illustrated in the figure. We then measurethe RSSI vector (fingerprint) between the user’s antenna andthe AP’s antennas at each reference point, and store thosefingerprints in a database. This phase is often referred as theoffline phase, or the survey phase. Now that we have collectedthe RSSI vectors of all the reference points, we move tothe so-called online phase or query phase where we performpattern matching between the RSSI vector collected on thetest points against the known fingerprints to find out theclosest reference point towards the user. In this paper, thispattern matching is done using a deep neural network thatwe describe later.
We start with the case where the AP has only oneantenna, in which case the fingerprint is merely a scalar(the user has only one antenna). We plot the CumulativeDistribution Function (CDF) of the localization error indotted red line in Fig. 2, where we define the error as theEuclidean distance between the test point and the projectedreference point. As expected, the localization error is quitelarge and the accuracy is not much better than making arandom guess.
Now, instead of only 1 antenna, we use all the 8 antennason the AP, making the RSSI measurement an 1 × 8 vector.Unfortunately, as shown by the dotted blue line in Fig. 2,there is no significant performance improvement when weincrease the number of antennas from 1 to 8. This is dueto the high correlation among the antennas on the AP sincethey are closely located to each other. We conclude that theextra antennas do not provide much new information topredict the user’s location.
3.2 Higher diversity via multiple APs
To obtain more diversity in the RSSI vector, this time weplace the 8 antennas in different locations surrounding thereference points, as shown by the 8 antenna symbols in Fig.1 so that we could get 8 uncorrelated RSSI measurementsfor each fingerprint. (Note that we setup the testbed suchthat each RF chain operates independently as if we have 8separate APs with 1 omni antenna each.) The solid purpleline in Fig. 2 shows that the localization accuracy has beengreatly improved thanks to the spatial diversity among theAPs, as has been reported extensively in prior fingerprintingworks.

4
Omni
2 4 6 8 10 12
2468
1012
Direction 1
2 4 6 8 10 12
2468
1012
Direction 2
2 4 6 8 10 12
2468
1012
Direction 3
2 4 6 8 10 12
2468
1012
Direction 4
2 4 6 8 10 12
2468
1012
Direction 5
2 4 6 8 10 12
2468
1012
Direction 6
2 4 6 8 10 12
2468
1012
Direction 7
2 4 6 8 10 12
2468
1012
Direction 8
2 4 6 8 10 12
2468
1012
Fig. 3: RSSI yields different patterns in different directionalmodes. (Yellow and blue stands for high and low RSSIrespectively.)
3.3 Higher diversity via SBAs
However, as we have argued earlier, it is not practical toassume that every location is covered by multiple APs.To increase measurement diversity within a single AP weswap the omni antennas with 8 directional switched-beamantennas, where each antenna is set to one distinct direction.(For more information about the specific hardware used inour experiments see the next section.)
In an multipath environment, the received signal x(t) ofan antenna can be written as:
x (t) =m∑i=1
g (φi, θi)mi (t) exp (j2πf0 (t+ τi)) , (1)
where mi(t) is the complex modulation function of theith multipath component, i = 1, . . . ,m, that arrives indirection (φi, θi) after flying for τi seconds, and g(φi, θi)represents the antenna gain on direction (φi, θi). For omni-directional antennas, g(φ, θ) is often considered constantfor all φ and θ, implying an equal antenna gain towardsall directions. On the other hand, given a direction (φ, θ),switched-beam antennas might yield different antenna gaing(φ, θ) when setting to different directional modes, whichultimately changes the received signal x(t) on that SBA.
Researchers have taken advantage of the spatial diver-sity brought by SBAs in many previous works, see, forexample [71], [72], [73], [74], [75], where SBAs are usedto increase signal power, suppress multipath or reduceinterference. To judge how much diversity one may obtainfrom different directions in the context of fingerprinting, wefirst collect RSSI measurements on a total of 144 differentlocations across a whole office room, and compare theRSSI heatmaps for the different directions/modes availableby the inexpensive SBAs that we use. As can be seen inFig. 3, the RSSI measurements have drastically differentpatterns for each mode (yellow stands for high RSSI andblue for low). This implies that a single SBA with n modesmay yield n relatively uncorrelated RSSI measurements, or,
equivalently, an AP with n SBAs each one configured ina different mode, may yield n relatively uncorrelated RSSImeasurements from a single packet reception. Motivatedby this, we perform the same experiment as in Fig. 1,this time using one AP with 8 SBAs each configured in adifferent mode. As shown by the solid blue line in Fig. 2,the localization accuracy increases significantly comparedto the case of 8 omni antennas. Remarkably, in Fig. 4 weplot the average error achieved by a variable number ofAPs and compare it against the error achieved by a singleAP equipped with 8 SBAs, and we can see that the lattersetup is as good as having 8 separate APs.
To investigate this further, we compare the correlationmatrix of RSSI measurements collected by (i) 8 separateAPs, (ii) a single AP with 8 directional antennas (SBAs) and,(iii) a single AP with 8 omni-directional antennas. Since theRSSI values collected by different antennas tend to followthe same distribution with similar mean and variance, wesimply compute the average correlation coefficients fromthe correlation matrices and plot the results in Fig. 5. As wecan see, by using SBAs we manage to reduce the averagecorrelation coefficient from 0.7 to 0.26, which is at the samelevel as that from the 8 separate APs setup.
4 SYSTEM DESIGN
Consider a single AP with 4 to 8 SBAs, each with 9 prede-fined directional modes to choose from including the omni-direction. (Note that current WiFi standards provision forup to 8 RF chains per chipset and modern, inexpensiveSBAs have 4 to 8 directional modes plus the omni mode.)We assume users are equipped with one omni-directionalantenna like many handhold devices today (more antennason the user side won’t change the performance or designof the system sizably). We restrict both the AP and usersto operate within the 802.11 standard, i.e. they can onlyperform operations that are defined by 802.11, including:user connecting to the AP, AP sounding the channel, up-and down-link transmission between the AP and users etc.Non-802.11-compatible operations are disallowed to avoidany hardware/software modifications on the devices. Nomultiple-AP-coordination or a central localization server isconsidered.
Like previous fingerprint methods, the system works intwo phases: the offline and the online phase. In the offlinephase, RSSI (or CSI amplitude) readings in multiple direc-tional modes, either from a single antenna or from multipleantennas, are collected for all the reference points across thesite under study. These data will be processed, labeled (eachreference point will be considered as one distinct class) andthen used to train a deep neural network classifier builtusing TensorFlow [76]. In the online phase, the AP measuresthe RSSI values from a user, and then feeds this vector to theclassifier. The user’s location will thus be estimated to be thereference point/class with the highest probability.
4.1 Hardware
We use 3 WARPv3 software defined radio boards [77] inour experiment. Two act as one single AP with 8 AdantStar 160 [78] switched-beam antennas (SBAs), while the

5
8 SBA 8AP 7AP 6AP 5AP 4AP 3AP 2AP 1AP0
0.5
1
1.5
2A
vera
ge E
rror
in M
eter
s
Fig. 4: Error versus number of APs.
8 APs 1 AP 8 SBA ANT 1 AP 8 Omni ANT0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
Ave
rage
Cor
rela
tion
Coe
ffici
ent
Fig. 5: Average correlation coefficients.
P1
P2
Pn
RSSI
Input LayerHidden Layers
Output Layer
Fig. 6: DNN structure.
other board serves as the user equipped with one omni-directional antenna. To test the localization performance, weuse WARPLab, a non-real-time system which makes real-time use of the channel but all the transmitter and receiverprocessing is done offline in MATLAB, which allows us tocollect the RSSI (or CSI amplitude) measurements and feedthem to the machine learning estimator located in a desktopcomputer.
4.2 Machine learning
We use a typical Deep Neural Network (DNN) classifierwith 2 hidden layers to predict the user’s location, mainlybecause DNN can effectively capture the non-linearity ofindoor signal strengths [79]. Also, we chose such matureand classic solution on purpose to keep things simple.
Briefly speaking, we train the neural network using asinput the RSSI vectors of the reference points whose correctclass is known, while the output is a vector of zeros andones indicating the correct class for the input. For example,if there are a total of 5 reference points, the correct outputfor the second reference point would be [0, 1, 0, 0, 0]. Weuse the ReLU (Rectified Linear Unit) function as the acti-vation function for each node and initialize their weightsand biases randomly. Following standard practice, at theoutput layer we apply the softmax function [80] to obtaina vector of probabilities that sum up to one, where the ithvalue represents the probability that the user is being at theith reference point. Last, we perform forward propagationand back propagation on the training data to update theparameters of the network using gradient descent. We havealso applied common techniques such as cross-validationand dropout to avoid overfitting and improve the accuracy[81].
In the online phase where we make predictions of auser’s location, we feed the input to the model and obtainthe output, which in the online phase is a vector of proba-bilities equal to the chance that each reference point is theestimated location. We thus can assert that the location ofthe input vector is closest to the reference point that hasthe highest probability in the output. If there are multipleRSSI vectors corresponding to each test point, we first makepredictions for each vector independently and then decidethe user’s location via majority voting.
Reference Points
“Neighborhood” Candidate RPs filtered by DoA
Intrinsic Error
Center RP
Fig. 7: DoA, neighborhood, and intrinsic error.
4.3 DoA via MUSIC
In addition to increased diversity of measurements, SBAshave another crucial benefit over omni antennas: one mayuse the MUSIC algorithm [44] modified to work with RSSImeasurements [45] to acquire rough DoA estimates withoutany additional overhead. While such DoA estimates maynot be accurate enough to be used for DoA-based local-ization, they may guide the machine learning estimationprocess by weeding out some erroneous potential locationsthat are in the wrong direction, so that we can narrow downthe choices for the correct location (see, for example, thegreen triangle in Fig. 7). This has the potential to improvethe localization accuracy sizably given that in indoor setups,two locations that are far way from each other might stillhave similar RSSI readings.
Specifically, the MUSIC algorithm is a widely-used toolfor estimating the arrival angle of an RF signal based onthe received signal amplitudes/phases at each element of anantenna array, of which the covariance matrix is analyzed byeigenvalue decomposition. Due to space limitations, pleaserefer to [44] for more details on the algorithm. The conven-tional MUSIC algorithm requires an antenna array, plus bothamplitude and phase information (full CSI) of the receivedsignal, which are not always available in commercial 802.11products: antenna arrays are too expensive and too bigfor indoor WiFi APs, while phase information may not beaccessible on certain WiFi chipsets as they don’t provide anyAPIs to get this information. Motivated by this, the authorsin [45] have proposed an adapted MUSIC algorithm which

6
achieves good DoA estimation accuracy even though it onlyrequires RSSI readings, which are available in every 802.11compatible device. Specifically, the adapted MUSIC algo-rithm uses the so called MUSIC pseudospectrum function,PS(θ), to obtain an estimate for the direction of arrival θ.The pseudospectrum function is defined as follows:
PS (θ) =
√√√√√√ 1 +∑Li=2
∣∣∣ gi(θ)g1(θ)
∣∣∣2∑Li=2
∣∣∣ gi(θ)g1(θ)− RSSIi
RSSI1
∣∣∣2 , (2)
where RSSIi is the RSSI reading obtained when settingthe antenna to directional mode i, gi(θ) is this antenna’spower gain towards direction θ in directional mode i, andmode 1 with power gain g1(θ) towards direction θ and RSSIreading RSSI1 is used for calibration purposes. Note thatthe power gain of an antenna towards a given direction canbe found from the antenna pattern provided by the antennamanufacturer and we have used the data-sheets of the SBAsthat we use to obtain those values. Also note that we use theOmni mode for calibration purposes.
With the above in mind, given a vector of RSSI mea-surements collected at one or more antennas while settingthem to one or more directional modes, the estimated DoAθ would be the direction that maximizes the MUSIC pseu-dospectrum defined in (2), that is:
θ = argmaxθ∈[0,2π)
PS (θ) . (3)
The DoA can be easily computed using brute-force. Formore details about the RSSI-based MUSIC algorithm pleaserefer to [45].
4.4 User mobility and Hidden Markov ModelThe core of our proposal is the use of SBAs for highermeasurement diversity and DoA estimation as describedabove. With the core system at hand, one may add a numberof potential enhancements along the lines of prior work [57],[58], [59], [60], [61], [62], [25], [26], [27], [63], [64], [65], [66],[82], [83], [84].
To illustrate the potential improvement from such en-hancements, we introduce an enhancement that takes ad-vantage of a user’s structured mobility to reduce the chancesthat a far away reference point is selected. We do so by im-plementing a Hidden Markov Model (HMM) which exploitsthe dependency between consecutive location estimationsof the user. To further improve the localization accuracy, wealso collect multiple measurements in a short period in theclose neighborhood of a location to average out noise overboth time and space. Details are discussed below.
4.4.1 Hidden Markov ModelA Hidden Markov Model is a Markov Model with un-observed, or “hidden” states [85], [86], [82]. In our case,we consider the client’s locations as the discrete hiddenstates, and treat the location predictions obtained from theprevious step as observable states.
We then apply the Viterbi Algorithm [87], [88], [89] to theHMM to find the most likely path of the client. Specifically,given a state space S with n hidden states, transition proba-bilities ai,j from state i to state j, observations at each time
slot y1, y2, ..., yT , and emission probabilities P (yi|k) wherek represents a hidden state, we want to find the most likelysequence of hidden states x1, x2, ..., xT which represents thepath that the client has taken between time 1 and T .
According to the Viterbi Algorithm, we define Vt,k asthe probability of the most likely sequence ending in statek at time t, based on the first t observations. The followingrecurrence relations can be shown to hold:
Vt,k = P (yt|k) ·maxx∈S
(ax,k · Vt−1,x) . (4)
We proceed as follows: We first determine the transitionprobabilities between any pair of hidden states based ontheir distance: as shown in Fig. 8, the closer one location isto the current location, the higher their transition probabilitywould be. For example, if the system localizes a client everyone second, the probability that the client is say 2 metersaway from the current location at the next second is muchlarger than the probability that the client has moved by10 meters (walking at a normal speed versus running).Then, we determine the emission probabilities: note thatthe observed state yt is merely the probability distributionof the client being in each state/location at time slot t (forinstance, one possible observed state could be “the client has20% chance of being in location 1 and 80% chance of beingin location 4”). In other words, yt = (pt1, p
t2, . . . , p
tn), where∑n
i=1 pti = 1. Clearly, pti can thus be seen as the probability
of the client being in hidden state i, given observation yt.Or, more formally, ptk = P (k|yt), and, using Bayes’ Formulawe obtain:
P (yt|k) =P (k|yt) · P (yt)
P (k)= ptk ·
P (yt)
P (k). (5)
As a result, Eq. 4 becomes:
Vt,k = ptk ·maxx∈S
(ax,k · Vt−1,x) ·P (yt)
P (k). (6)
To simplify the analysis, it is reasonable to assume thatP (k) = 1
n ,∀k, i.e., the client is equally likely to be atany location. This, in turn, implies that P (yt) can also beassumed to be the same for all possible yt vectors, sinceeach location corresponds to a specific observed state andthe observed states have the same structure by symmetry.Note that although we do not know the exact value for theterm P (yt)
P (k) , it can be ignored since it is a constant factorthat would be multiplied to all Vt,k where t ∈ [1, T ] andk ∈ [1, n], and thus poses no change to the decision of x thatmaximizes Vt,k.
Starting from V1,k, we can now compute Vt,k recursivelyfor all t between 2 and T . The Viterbi algorithm initializesV1,k as follows: V1,k = P (1, k) · P (y1|k), where P (1, k)denotes the initial probabilities. By assuming P (1, k) isuniformly distributed and using Bayes’ Formula for P (y1|k)we obtain:
V1,k =p1kn· P (y1)P (k)
. (7)
Besides the value of Vt,k, we also need to record whichstate x was used to maximize it in order to retrieve the fullViterbi path. By letting Ptr(k, t) be the function that returns

7
the state x that maximizes Vt,k, we can find the client’s mostlikely path (x1, x2, ..., xT ) by backtracking from the end:
xT = argmaxx∈S
(VT,x) , (8)
xt−1 = Ptr (xt, t) , t = T, . . . , 2. (9)
4.4.2 Multiple Measurements to average out noiseOne may compose “neighborhoods” which consist of, say9 reference points such that each neighborhood is about1 square meter (see orange grid at the top left of Fig.7), take say 10 consecutive RSSI measurements within ashort time period (say 0.1 seconds, such that it is likelythat the user has not moved longer than 1m during thisperiod), predict the location from each measurement (seeshaded reference points in Fig. 7), and finally use these 10predictions together to determine the probability of the userbeing in each neighborhood. This step allows us to reducethe noise of the estimation by averaging the results frommultiple measurements over both time and space. Whenapplying the HMM treating as a location a neighborhoodof points rather than a single point, we report in the endas the predicted location the center reference point of theneighborhood (see Fig. 7).
5 EXPERIMENTAL RESULTS
In this section we present extensive experimental resultsthat we perform under a variety of indoor environments. Tomake our results/findings realistic, we deliberately conductthe online localization phase in a dynamic environmentwhere people are moving around, doors are being openedand closed, etc.
We will start with experiments conducted inside a largeoffice room of 7 by 10 meters size (805 square feet), see Fig.9a. This is a typical office environment that has desks, chairs,and other furniture including some metal shelves in themiddle, blocking and reflecting any RF signals. We installthe AP in the center of the room as shown in the figure.A total of 144 reference points are distributed evenly inthe green area, with 33cm distance between each other. Foreach reference point, we collect 1000 measurements in about10 seconds in the training phase to eliminate the influenceof AWGN noise. A total of 160 test points are randomlypicked across the room, and we define the error as thedistance between the actual location of the test point andthe reference point that it is classified to.
5.1 Baseline resultsWe first set the 8 antennas of the AP to the omni mode. Asexpected, the RSSI vectors collected are highly correlated.This yields an error which is as bad as random guessing.Specifically, the CDF of the error under random guessingversus fingerprinting using omni mode measurements froma single AP are pretty much on top of each other and mean-ingful localization is not possible. While prior work hasaddressed this by deploying more APs in an unrealisticallydense fashion, we stay with one AP but set the 8 antennasto different directions in order to obtain uncorrelated RSSIreadings and improve the classification accuracy. The results(CDF of the error) are shown in the solid blue line in Fig. 9b:
some test points are classified correctly to their nearby refer-ence points, others are not, and the average error achieveddrops from 6m to 2m. Note that this is much larger than the0.5m reported in Fig. 2, which is due to the fact that nowwe are operating on a much larger room without line-of-sight towards most of the locations and under a dynamicenvironment involving human and object mobility.
5.2 Using all directions of all antennasWe examine whether we can improve performance by usingmore features for the machine learning model: instead ofone direction per antenna, we switch the antenna modesin a round-robin manner and obtain a total of 8×9=72 RSSImeasurements, 9 measurements from each of the 8 antennas.By doing so, we observe some performance gain as shownin the dotted blue line in Fig. 9b which is nevertheless small.This is consistent with our prior observation that antennason the same AP have a high correlation when configuredto the same mode, which holds irrespectively of whetherthis is an omni mode or a directional mode. In summary,although we have 8 times more features than before, we donot get a sizable performance improvement and it is thusmore efficient to collect up to 9 measurements, one for eachmode, from either one of the antennas.
5.3 Using DoA via MUSICWe add the DoA estimation into the features as follows.For each RSSI vector, we compute its estimated DoA usingthe MUSIC algorithm as described before, and feed it tothe machine learning model along with the original RSSIs.The additional information of DoA allows the model tofilter out wrong candidate reference points (RPs) during theclassification process as illustrated by the green triangle inFig. 7. The new results are plotted in the red solid line inFig. 9b. As we can see the localization accuracy has beengreatly improved thanks to the DoA information, with anaverage error of 1.1 meters. Note that the DoA informationcan be obtained directly from the RSSI vector thanks to thedirectionality of SBA. Similarly, we do the same for the 72RSSI case (the dotted red line), where we can again observesome minor performance gain thanks to the additional RSSImeasurements.
5.4 Using user mobility via Hidden Markov ModelWe investigate the performance improvement from usingmobility via an HMM in the same office room setup, wherea client walks around the office room, and compare thelocalization results between 1) plain fingerprinting, as de-scribed in Section 5.3; 2) HMM-t-fingerprinting, where theclient’s location x at time t is considered as the location withthe largest Vt,k, given observations till time t (y1, y2, ..., yt);3) HMM-final-fingerprinting, in which case we first findthe last location xT based on all the observations, andthen obtain all client’s prior locations (complete path) bybacktracking, see Eq. (9). As shown in Fig. 10, HMM-final-fingerprinting has the highest accuracy since it takesadvantage of all the observations, but location predictionscan only be computed at the end. HMM-t-fingerprintingpredicts locations on the fly since each estimation only

8
9 5 0 5 9
Distance to Current Location (Meters)
9
5
0
5
9Dis
tanc
e to
Cur
rent
Loc
atio
n (M
eter
s)
Fig. 8: Transition probabilities decrease(lighter color) as distance from currentlocation (center point) increases. (a) Office room topology (805 square feet).
0 2 4 6 8
Error in Meters
0
0.2
0.4
0.6
0.8
1
F(x
)
8-RSSI8-RSSI + MUSIC8-RSSI + MUSIC + HMM72-RSSI72-RSSI + MUSIC72-RSSI + MUSIC + HMM8 APs
(b) Localization accuracy.
Fig. 9: Experiments in the office room.
(a) The ground truth. (b) Raw localization results. (c) Instantaneous path. (d) Final Viterbi path.
Fig. 10: Experiment on the HMM performance.
requires the observations till that moment and achieves thesame accuracy as HMM-final-fingerprinting as time t grows,as illustrated by Fig. 10c and Fig. 10d.
Finally, we plot the localization error distributionachieved by our system when the HMM is added to our corefingerprint method, see yellow curves in Fig. 9b (like before,the solid line corresponds to the 8-RSSI measurements case,and the dotted line to the 72-RSSI measurements case). Theaverage error is now reduced to sub-meter levels, to 0.87in the 8-RSSI vector case, and to 0.81 in the 72-RSSI vectorcase. These errors correspond to the case where we take 10measurements over a short period of time and consider thecenter of a neighborhood/square of 9 points as the locationwhen using the HMM, thus averaging over both time andspace to reduce noise (See Section 4.4.2). If we only collectone measurement and don’t use a neighborhood/square butpredict a single point location directly, the average erroris about 10% larger (0.95 versus 0.87) due to more noisymeasurements.
Note that our HMM is only offered as an example.Prior work focusing on augmenting the core fingerprintingmethodology with more side information will likely im-prove the accuracy of our core system even further. Forinstance, using the smartphone’s magnetic compass andaccelerometer, one can measure a client’s moving directionand speed, and thus obtain more accurate transition proba-bilities that would further improve the performance of theHMM.
5.5 Results when varying other parametersWe study the impact of various other factors on the localiza-tion accuracy.
5.5.1 Different environment: corridorWe conduct another set of experiments in a corridor insteadof the office room, to study the performance of our system indifferent environments. The topology of the corridor, whichis about 70 ft long and covers an area of 1200 square feet,can be seen in Fig. 11a. While this is a larger area than theoffice room previously considered, it has less obstacles andmost of the area has a line-of-sight towards the AP. Wefix 190 reference points evenly and select 200 test pointsrandomly, all in the green area shown in the picture. TheCDF of the localization error is shown in Fig. 11b for allapproaches. The error is only sightly higher than in the officeroom setup and the same trend with respect to the impact ofvarious additions to the core system can be observed as weadd DoA estimation and the use of the HMM. The averageerror in the end is 0.94m and 0.89m for 8-RSSI and 72-RSSImeasurements respectively.
5.5.2 Using CSI instead of RSSIBesides RSSI, researchers have leveraged Channel StateInformation (CSI) measurements to perform fingerprinting[90]. Fig. 12 shows a comparison of the CDF of the lo-calization error when using either RSSI or CSI amplitudemeasurements. Note that we use the amplitude only ratherthan the full CSI because a channel’s phase changes fastand is often considered random [79]. We conduct the ex-periments in the setting of Fig. 1 using vectors of RSSIand CSI amplitudes as the input for the neural networkclassifier. As can be seen from Fig. 12, there is no significantdifference in terms of localization performance when weswitch between RSSI (the blue line) and CSI (the red line).Since CSI measurements are much harder to obtain (they

9
(a) Corridor topology.
0 2 4 6 8Error in Meters
0
0.2
0.4
0.6
0.8
1
F(x
)
8-RSSI8-RSSI + MUSIC8-RSSI + MUSIC + HMM72-RSSI72-RSSI + MUSIC72-RSSI + MUSIC + HMM8 APs
(b) Localization accuracy.
Fig. 11: Experiments in the corridor.
0 0.5 1 1.5 2
Error in Meters
0
0.2
0.4
0.6
0.8
1
F(x
)
RSSI - 16cm gridCSI - 33cm gridRSSI - 33cm grid
Fig. 12: Localization accuracy using RSSIvs CSI for 33cm and 16cm grids.
can be collected via the MIMO channel sounding process),we recommend the use of RSSI.
5.5.3 Different grid sizesWe study the impact of different grid sizes on the localiza-tion accuracy in the setting of Fig. 1. Since the user can onlybe localized to one of the reference points which are discretein space, the “intrinsic error” of the system depends on thegrid size, as illustrated in Fig. 7. More specifically, assumingthat the distance between two adjacent reference points isd and that the user is uniformly randomly positioned ina 2-D space, we use basic probability and some algebra tocompute the intrinsic error, i.e., the expected error when theuser is accurately located to the nearest reference point, andobtain:∫ d
2
0
∫ d2
0
4
d2
√x2 + y2dydx =
d
6
(√2 + sinh−1(1)
). (10)
As an example, with d = 33cm, the localization accuracy islimited by a system’s intrinsic error of 13cm.
We reduce the grid size by half from 33cm to 16cm, sothat there are roughly 4x reference points in the same areaand the intrinsic error becomes 6cm. The results are plottedin the green line in Fig. 12, which shows that, as expected,a smaller grid size can indeed improve the accuracy, espe-cially for test points which are correctly classified to one ofthe nearby reference points. That said, the smaller the gridsize the larger the number of reference points, which, inturn, increases the cost of the offline phase. While the offlinephase may take place with robots and other automatedmeans in large industrial facilities today, there is clearly alimit to how small the grid size may be for the approach tostay practical.
5.5.4 Number of antenna and number of directionsNext, we examine the impact of the number of antennas/RFchains of the AP, and the impact of the number of differentdirectional modes on each SBA. We perform the experimentsin the office room (Fig. 9a) using both the RSSI vector andDoA estimation to predict the user’s location.
First, we fix the number of directional modes to 8 andreduce the number of antennas on the AP. For the cases withless than 8 antennas, we switch the directional modes tocover all the 8 directions. As shown by the dotted blue line
in Fig. 13, reducing the number of antennas only has a minorinfluence on the localization performance. This is mainlybecause of the high spatial correlation among the antennason the same AP, which means that the RSSI measurementsof different antennas on the same directional mode are likelyto be similar and thus higher number of antennas could notgive us much more useful information, as already discussed.However, as we elaborate on later in the implementationsection, reducing the number of antennas increases the num-ber of packets that an AP has to receive from a user to getenough RSSI readings. For instance, to get a measurementfor 8 directions/modes, we would need either an AP with8 antennas set in different directions/modes to receive asingle packet from a user, or an AP with 1 antenna to switchbetween the 8 different directions/modes and receive onepacket under each mode for a total of 8 packets.
While the number of antennas does not affect the resultsby much as long as all available modes are used, the solidblue curve on that plot shows that the number of directionalmodes does have a huge impact on the localization decision.To get this curve we fix the number of antennas to be 8but reduce the number of directional modes used for bothRSSI measurements and DoA estimation. As the number ofdirectional modes decreases the inaccuracy of the systemincreases drastically, because we lose diversity in the RSSImeasurements and we lose accuracy in the DoA estimation,the latter because the accuracy of the MUSIC algorithm isstrongly related to the number of independent measurementusing distinct directional modes [45]. For example, as shownby the red line in Fig. 13, the average error of the DoAestimation increases from 15 degrees to over 50 degrees asthe number of modes goes down from 8 to 2.
5.5.5 More than one AP
Although the purpose of this paper is to provide a way toget good fingerprint accuracy using only one AP, we wouldalso like to examine whether we can get any performancegain when we have more than one AP. With this in mind,we use 2 APs each equipped with 4 SBAs to cover the area ofFig. 1 and compare the localization accuracy from this setupagainst 1 AP with 8 antennas. As shown by the error CDFsin Fig. 14, we get a mild performance gain with two APs.The improvement is due to a combination of two factors

10
2 4 6 8
Number of Modes/Antennas
1
1.5
2
2.5
3A
vera
ge E
rror
in M
eter
s
10
20
30
40
50
60
Ave
rage
Err
or in
Deg
rees
Loc. error by different number of directional modesLoc. error by different number of antennasDoA error by different number of directional modes
Fig. 13: Localization and DoA accuracyas a function of the number of direc-tional modes.
0 0.5 1 1.5 2
Error in Meters
0
0.2
0.4
0.6
0.8
1
F(x
)
1 AP - 8 antennas2 AP - 4 antennas each
Fig. 14: Using more APs to cover non-LOS areas.
8 APs 1 AP 8 SBA ANT0
20
40
60
80
100
Incr
ese
in A
vera
ge L
ocal
izat
ion
Err
or (
%)
Fig. 15: Localization error increases byaround 50% after 4 months due tochanges in the room layout.
brought by the second AP: the reduced non-LOS area and aslightly higher diversity in the RSSI readings.
In the comparison above we kept the total numberof uncorrelated measurements the same. More general, inan enterprise WiFi scenario where it is common to havea couple of APs within range of a user, the localizationaccuracy would improve when using say two AP, as in thiscase the total number of uncorrelated measurements fed intothe machine learning and DoA estimation modules wouldobviously double.
5.5.6 Adapting to Environmental Changes
Fingerprint-based localization accuracy may reduce withtime due to environmental changes, because the estimateis based on a fingerprint map collected in the past whenthe environment might have been different [46], [91], [92],[93]. In this section we access whether our SBA-based fin-gerprint system is less or more robust to such changes thantraditional fingerprinting.
To do so, we use “old” fingerprint reference points topredict the location of users a number of months into thefuture. Specifically, we remeasure the RSSI vectors at thesame test points used in the original experiment (reportedin Section 5.1) and estimate the test point locations usingthe “old” fingerprint reference points which were measured4 months in the past. Of interest is by how much thelocalization error will increase given that there have beenplenty of changes in the layout of the room including movedchairs, desks, and even metal shelves. Note that the locationof the AP in the context of our SBA-based system, as well asof the APs in the context of a traditional fingerprint systemutilizing with multiple APs, is the same as before.
Fig. 15 shows that the traditional fingerprint system suf-fers a bit more from the environmental changes (50% errorincrease) than our SBA-based system (40% error increase).While clearly the accuracy loss heavily depends on theamount of environmental changes and thus it is scenariospecific, prior work has reported similar degradation on theaccuracy over similar periods of time, see, for example, [46].Note that there is a large body of prior work on how toefficiently “refresh” fingerprints to remedy for this accuracyloss with the minimum possible overhead, see, for example,[91], [92], [93], and all this prior work is equally applicableto our SBA-based system as well.
Last, we argue that the slightly better robustness of ourSBA-based solution over traditional fingerprinting is likelynot by chance. To see this, consider a typical indoor spacewhere only one area of the space (e.g. an office or a shop) isremodeled. While the signal to omni antennas of APs wouldbe generally affected by this change, the signal to directionalmodes that look the “other” way wouldn’t that much. Thus,some of the fingerprints generated by directional modes ofSBAs would be still relatively valid.
6 IMPLEMENTATION OVERHEAD
As already discussed, the cost of replacing omni antennaswith SBAs is in the order of a handful of dollars which isthus not a concern, especially for enterprise grade WiFi APs.What is more, our system does not need a dense deploymentof additional APs such that clients are within range ofmultiple APs, a requirement for traditional fingerprinting.Thus, overall, the cost of our solution is significantly lessthan that of traditional fingerprinting.
What we have not discussed yet is the potential airtimeoverhead from collecting fingerprints for the various SBAmodes, as well as any overhead from the need to selectmodes. We discuss those issues in this section.
6.1 Collecting fingerprints in a standard compatiblemannerTwo types of RF signal measurements can be used for indoorlocalization purposes: RSSI or CSI (amplitude).
RSSI can be easily collected during the pairing processor during any type of data transmission (SISO, SU-MIMO,MU-MIMO) where a packet exchange between the AP andthe user takes place. Note that the RSSI is easily accessible inall commodity hardware/WiFi chipsets via predefined APIs.When no data transmission is going on, the AP can activelyprobe a user and obtain the RSSI vector by receiving an ACKmessage. With a tiny or zero payload, the total transmissiontime to send such a probe and receive an ACK would beabout 100µs, assuming say a 54 Mbps SISO transmissionunder 802.11g (and it would be even less under 802.11n/ac).
CSI information can be obtained through the channelsounding process in the beginning of any SU-MIMO orMU-MIMO downlink transmission under 802.11n/ac. Dur-ing this process the AP sends a short, predefined channel

11
sounding sequence to the user. After receiving the soundingsequence, the user estimates the downlink channel andsends the estimated CSI back to the AP so that the APcan use it to perform MIMO transmission afterwards. Notethat the CSI information can be retrieved from the APhardware in many commodity chipsets today, though notall chipset manufacturers open up the corresponding API toWiFi system integrators.
The above are no different than in a traditional fin-gerprinting system. However, a traditional fingerprintingsystem requires a handful of APs to record measurementsfrom a client who is not associated with them, a non-standard compatible requirement which we do not have.
6.2 Collecting fingerprints for all directions/modesWhile traditional fingerprinting needs to collect one mea-surement at each AP within range of the client (in one of theomni antennas of each AP), we collect one measurement perSBA mode in the AP at which the client is associated with.Since our experiments have established that the accuracy oflocalization heavily depends on the number of uncorrelatedRSSI measurements, with say 8 directional modes per SBA,our goal is to obtain 8 RSSI readings, one from each of the 8distinct modes.
We can do this as efficiently as collecting one reading:For example, if the AP has 8 antennas, we can set eachantenna to one distinct direction and get 8 readings, onefor each mode, with a single packet reception. While thisis the recommended process, we comment on a few morecases: if the AP has less than 8 antennas, say only 1 antenna,we would set the antenna to one mode at a time and get1 reading for each packet transmission. If the AP has 8antennas but we want to collect RSSI measurements at eachantenna for each mode, that is, 8 × 8 = 64 RSSI readingsin total, then we would need 8 packets in total since eachpacket reception will yield one measurement per antennafor the mode the antenna is currently configured at.
6.3 Airtime overheadWe consider a realistic scenario and perform back-of-theenvelope calculations to find any airtime overhead due toour localization scheme. Assume say 40 users are pairedwith an AP equipped with 8 SBAs. Say users wish tohave localization estimates every one second for navigationpurposes.
If the users are actively transmitting data, then therewould be at least one packet exchange per user during aone second period, and thus the airtime overhead is zero.If the users are idle, then the AP does need to probe theusers (which would take at most 100µs per user assumingsay a 54 Mbps SISO transmission under 802.11g, and itwould be even less under 802.11n/ac) every one second,and thus the overall overhead would be 40×100µs
1000ms = 0.4%.However, since the users are not transmitting data packetsanyway, this overhead can still be considered as zero sincethe channel is idle.
Now suppose we wish to collect say 10 independentmeasurements per user every one second, to reduce thenoise of the readings (see Section 4.4), and assume the po-tentially troublesome case where users are not transmitting
data packets and ACKs thus all those measurements needto be collected through probing. 10 measurements take lessthan 1ms to complete, and thus less than 40ms for all the40 users. Therefore, the overall airtime overhead caused bylocalization would be 40ms
1000ms = 4%. But again, this is whenthe channel is idle as users don’t transmit any data packets.If they do, then probing is not required as regular ACKs willprovide the required measurements.
The above are no different than in a traditional finger-printing system. However, a traditional fingerprinting sys-tem requires to combine the measurements from a handfulof APs to some central server, e.g. the controller, whichwould then process all of them jointly. While these mea-surements would probably be transmitted over wire thusnot contributing to airtime overhead, this requirement doescontribute to the general overhead and complexity of thesystem.
6.4 Selecting the best antenna modes
In our experiment setting we have leveraged RSSI readingsobtained from all the 8 directional modes of the SBAs thatwe used to achieve a good localization accuracy. Obviously,the more directional modes there are, the better the accuracywould be as RSSI on each mode is an independent featurefor the machine learning model. That said, more than say 10modes are neither needed, as 10 independent readings canyield very good accuracy (this would correspond to a legacyfingerprinting system collecting readings in 10 APs for eachclient), nor are they desired, as this would raise the cost ofthe SBAs. Still, in a hypothetical scenario where a certainSBA has a lot of directional modes and one would wishto select a subset of these modes of cardinality say 10 thatyields the best localization performance, this can be doneby standard feature-selection methods such as exhaustivesearch, greedy hill climbing [94], [95] or filter algorithmsbased on correlation and mutual information [96].
7 TOA LOCALIZATION WITH SBAS
There are two fundamental advantages of SBAs, higherdiversity and ability to get a rough DoA estimate.Fingerprinting-based localization is only one of the possiblebeneficiaries of these advantages, e.g. we have used themto get better MIMO rates in both single AP setups [42] andmultiple, coordinated APs setups (where low coordinationoverhead is of essence) [43]. In this section we investigatehow SBAs may benefit other types of localization, and, inparticular, Time-of-Arrival (ToA) methods.
Under ToA methods, an AP measures the total traveltime t of the RF signal between the client and itself, andthen infers their distance by multiplying t by the speed oflight. If multiple APs do this (at least three), the client’slocation can be estimated by triangulation. However, theclock of the APs and the clock of the client need to betightly synchronized in order to obtain a precise distanceestimation, which is very hard in practice. Therefore, a morepractical method called Time-Difference-of-Arrival (TDoA)has been proposed: instead of measuring the absolute timebetween the client and each AP, the APs would simplymeasure the differences of arrival times from the same signal

12
Estimated Location
Fig. 16: Example of TDoA + DoA estimation using SBAs.
broadcast by the client. At last, the client’s location can bedetermined by the intersection of two hyperbolas. In thiscase, only the APs’ clocks need to be synchronized, which ismuch easier to achieve.
To improve the performance of these techniques, re-searchers have proposed several “hybrid” methods thatcombine ToA and DoA estimation to localize the client, oftenusing antenna arrays [97], [98]. Inspired by those works,we study the accuracy improvement of TDoA if one usesinexpensive, compact SBAs to infer rough DoA estimates,rather than using antenna arrays. As mentioned above, aTDoA localization system first measures two time differ-ences from two pairs of APs (for example, the signal arrivaltime difference between AP1 and AP2 t1,2, and the signalarrival time difference between AP1 and AP3 t1,3), convertsthe time differences into distance differences d1,2 and d1,3,and then predicts the client’s location to be the intersectionof two hyperbolas generated by the distance differences.If the hyperbolas do not intersect or intersect twice, thesystem could select another two pairs of APs (e.g. AP1 - AP2
and AP2 - AP3) to find a unique intersection between thetwo new hyperbolas. With the additional DoA informationprovided by the SBAs, the system can further refine thearea for the client’s potential location and thus improve theoverall accuracy. Fig. 16 illustrates such mechanism.
To see how much improvement we can get from SBAs,we perform a simulation using results from our testbed andprior testbeds [97], [98], [99], [100]: in a round topologywith 40 meters radius, three APs are located towards thecenter with 15 meters distance between each other. A clientis randomly located inside the topology and is broadcastingto the APs. Upon receiving the signal from the client, theAPs measure the TDoA between themselves, that is, eachAP measures the arrival time of the signal and compares thedifference between its measurement and the measurementsof the other APs. Based on prior work testbed results, weset the inaccuracy of distance difference estimation (inferredfrom the time difference) to be normally distributed with amean 3 meters, see [99], [100] for details, while we set theinaccuracy of DoA estimation to 30 degrees based on ourtestbed results, see Section 5. We then compare the errorbetween 1) plain TDoA, where the system would estimatethe client’s location when there is only one intersectionbetween two hyperbolas, and 2) TDoA + DoA, where thesystem would take the additional step to verify if such
0 5 10 15 20 25 30
Error in Meters
0
0.2
0.4
0.6
0.8
1
F(x
)
Plain TDoA
TDoA + DoA
Fig. 17: Localization error under plain TDoA and TDoA +DoA using SBAs.
Indoor Localization
Scheme
Accuracy # AP Cost
Vanilla Fingerprinting < 2m ≥ 10Medium [54]
(redundant APs, offline phase)
This work Medium≈90cm
1 Low
Motion Sensor [41] Medium<1m
≈ 4 Medium
Accelerometer [84] Medium≈70cm
≈ 7 Medium to high
Vanilla AoA < 1m ≥ 2High [54]
(Phased antenna array, LOS)
SpotFi [7] Medium≈40cm (with 4-5 LOS APs)≈160cm (with 2 LOS APs)
≈ 5 Medium
Phaser [97] Medium≈90cm
≈ 4 Medium
Swan [36] Medium to high≈45cm (APs with 9 ant.)
≈ 2 Medium
Vanilla ToA/TDoA < 1m ≥ 3High [54]
(Tight synchronization, LOS)
Chronos [3] Medium≈65cm (LOS)
≈100cm (non LOS)
1 Low
ToneTrack [53] Medium≈90cm
≈ 4 Medium
PLAT [31] High≈5cm (60GHz, sharp lobe)
1 High
Fig. 18: Performance/cost comparison.
intersection is within the DoA estimation range of the APs.For both methods, the system would traverse through allthe possible combinations of AP pairs until the client’slocation can be fixed, or it will perform the measurementagain if none can be found. Note that in case of multipleintersections, the TDoA + DoA could also select the one thatis closer to the center of gravity of the DoA estimation rangethus arriving to a location estimate faster (without requiringthe consideration of an additional AP pair). The CDF of thelocalization error of both approaches is shown in Fig. 17.It is clear that TDoA + DoA significantly lowers the error,achieving an average error of nearly half that of plain TDoA.
8 PERFORMANCE/COST COMPARISON
Considering fingerprinting-based localization schemes only,it is evident that our work reduces the cost and increases theaccuracy of vanilla fingerprinting-based localization, thanksto a significant reduction on the number of APs required foraccurate localization. Specifically, it achieves an accuracy inthe order of 90cm using a single AP only (equipped with

13
a handful of SBAs), whereas vanilla fingerprinting wouldrequire about 10 APs to get that accuracy. Note that somerecent works have improved fingerprinting accuracy usingadditional information. For example, [41] uses informationfrom motion sensors to get accuracy in the order of 1m with4 APs, and [84] uses information from accelerometers to getaccuracy in the order of 70cm with 7 APs. Our work can useany of the above “add-on” techniques to further increase theachieved accuracy. Note that clearly our work does nothingto reduce the well known cost of fingerprinting associatedwith the need of offline training.
Comparing our fingerprinting-based approach to otherapproaches is more challenging due to the diversity ofsolutions, but some high level comparison is neverthelessin order. Traditional AoA methods require, in general, LOS,expensive antenna arrays and at least 2 APs to produce goodresults. That said, some recent works have provided goodaccuracy at reasonable cost. For example, SpotFi [7] reducesthe cost of AoA by using a “virtual antenna array” using 3antennas rather than an expensive antenna array, achieving40cm accuracy when using a handful of APs with LOS tothe target, and 160cm accuracy when only a couple of thoseAPs have LOS to the target. Phaser [97] synchronizes andcombines multiple APs equipped with plain antennas andtreats the combined set of antennas as an antenna array,yielding about 100cm accuracy when using a couple ofAPs. Swan [36] places multiple antennas on the same RFchain in a way that allows for antenna array functionalitywithout the cost of multiple RF chains, achieving about50cm accuracy when using two APs with 9 antennas and3 RF chains each.
Traditional ToA/TDoA methods require in general LOS,synchronization between devices, a large band and at least3 APs to get accurate results. That said, some recent worksagain have provided good accuracy at reasonable cost. Forexample, Chronos [3] measures the phase offset of uplinkand downlink CSI in as large of a band as possible betweena user and a single AP, achieving about 70cm accuracy withLOS and about 100cm without. ToneTrack [53] combinesinformation from multiple signals on different bands toachieve about 90cm accuracy with 4 APs. Last, some workshave attempted to get very high accuracy disregarding cost,e.g. PLAT [31] uses mm-wave beamforming at 60GHz witha very sharp lobe to get 5cm accuracy.
Comparing the accuracy of all these schemes is some-what arbitrary as the reported numbers depend on the usedtestbeds and the environment, which differ across studies,but one may categorize them into low, medium and highaccuracy schemes based on the reported values. Compar-ing the cost of those schemes is also somewhat arbitrary.That said, things like expensive antenna arrays, expen-sive hardware e.g. mm-wave grade, tight synchronizationrequirements among multiple devices for ToA purposes,use of a large number of APs for fingerprinting AoA andToA, etc. constitute a sizable cost, and one may similarlycategorize the schemes into low, medium and high cost. Fig.18 summarizes these results.
9 CONCLUSIONS
In this paper we show with SDR experiments that SBAscan help fingerprint-based indoor positioning mechanismsachieve significantly better accuracy with a single AP, asingle packet reception, no changes to clients, negligibleto zero airtime overhead, and in full compatibility to the802.11 standard. The only required change is to swap omniantennas with SBAs. Such SBAs cost a couple of dollarsmore than omni antennas, and are already integrated withWiFi chipsets from all major chipset manufacturers. Thus,at the cost of a handful of dollars per AP, highly accurateindoor localization is possible via WiFi fingerprinting.
REFERENCES
[1] J. Wang, H. Jiang, J. Xiong, K. Jamieson, X. Chen, D. Fang, andB. Xie, “LiFS: Low human-effort, device-free localization withfine-grained subcarrier information,” in Proc. ACM MobiCom,2016.
[2] F. Gu, J. Niu, and L. Duan, “WAIPO: A fusion-based collaborativeindoor localization system on smartphones,” IEEE/ACM Trans.Netw., vol. 25, no. 4, pp. 2267–2280, Aug 2017.
[3] D. Vasisht, S. Kumar, and D. Katabi, “Decimeter-level localizationwith a single WiFi access point,” in Proc. USENIX NSDI, 2016.
[4] P. Bahl and V. N. Padmanabhan, “RADAR: an in-building RF-based user location and tracking system,” in Proc. IEEE INFO-COM, 2000.
[5] M. Youssef and A. Agrawala, “The horus WLAN location deter-mination system,” in Proc. ACM MobiSys, 2005.
[6] S. Sen, D. Kim, S. Laroche, K.-H. Kim, and J. Lee, “BringingCUPID indoor positioning system to practice,” in Proc. IW3C2WWW, 2015.
[7] M. Kotaru, K. Joshi, D. Bharadia, and S. Katti, “SpotFi: Decimeterlevel localization using WiFi,” SIGCOMM Comput. Commun. Rev.,vol. 45, no. 4, pp. 269–282, Aug. 2015.
[8] C. Wu, Z. Yang, Z. Zhou, Y. Liu, and M. Liu, “Mitigating largeerrors in WiFi-based indoor localization for smartphones,” IEEETrans. Veh. Technol., vol. 66, no. 7, pp. 6246–6257, July 2017.
[9] T. Nowak, A. Koelpin, F. Dressler, M. Hartmann, L. Patino, andJ. Thielecke, “Combined Localization and Data Transmission inEnergy-Constrained Wireless Sensor Networks,” in Proc. IEEEWiSNet, 2015.
[10] Y. Liu, Y. Shen, D. Guo, and M. Win, “Network localizationand synchronization using full-duplex radios,” IEEE Trans. SignalProcess., vol. PP, no. 99, pp. 1–1, 2017.
[11] J. Wang, J. Xiong, H. Jiang, X. Chen, and D. Fang, “D-watch:Embracing ”bad” multipaths for device-free localization withCOTS RFID devices,” IEEE/ACM Trans. Netw., vol. 25, no. 6, pp.3559–3572, Dec 2017.
[12] Y. Zhang, W. Liu, Y. Fang, and D. Wu, “Secure localization andauthentication in ultra-wideband sensor networks,” IEEE J. Sel.Areas Commun., vol. 24, no. 4, pp. 829–835, April 2006.
[13] J. Zhao, W. Xi, Y. He, Y. Liu, X. Y. Li, L. Mo, and Z. Yang,“Localization of wireless sensor networks in the wild: Pursuitof ranging quality,” IEEE/ACM Trans. Netw., vol. 21, no. 1, pp.311–323, Feb 2013.
[14] K. Yedavalli and B. Krishnamachari, “Sequence-based localiza-tion in wireless sensor networks,” IEEE Trans. Mobile Comput.,vol. 7, no. 1, pp. 81–94, Jan 2008.
[15] A. Galstyan, B. Krishnamachari, K. Lerman, and S. Pattem, “Dis-tributed online localization in sensor networks using a movingtarget,” in Proc. ACM/IEEE IPSN, 2004.
[16] M. Li and Y. Liu, “Rendered path: Range-free localization inanisotropic sensor networks with holes,” IEEE/ACM Trans. Netw.,vol. 18, no. 1, pp. 320–332, Feb 2010.
[17] F. Benbadis, K. Obraczka, J. Cortes, and A. Brandwajn, “Explor-ing landmark placement strategies for self-localization in wirelesssensor networks,” in Proc. IEEE PIMRC, 2007.
[18] T. He, C. Huang, B. M. Blum, J. A. Stankovic, and T. Ab-delzaher, “Range-free localization schemes for large scale sensornetworks,” in Proc. ACM MobiCom, 2003.

14
[19] C. Petrioli, R. Petroccia, and D. Spaccini, “DEMO: Time Syn-chronization and Localization for Underwater Acoustic SensorNetworks with the SUNSET Framework,” in Proc. ACM MobiComWiNTECH), Miami, Fl, USA, 2013.
[20] M. Chen, Z. Liu, L. W. He, P. Chou, and Z. Zhang, “Energy-based position estimation of microphones and speakers for AdHoc microphone arrays,” in Proc. IEEE WASPAA, 2007.
[21] W. Huang, Y. Xiong, X. Y. Li, H. Lin, X. Mao, P. Yang, and Y. Liu,“Shake and walk: Acoustic direction finding and fine-grainedindoor localization using smartphones,” in Proc. IEEE INFOCOM,2014.
[22] H. Kulhandjian and T. Melodia, “A low-cost distributed net-worked localization and time synchronization framework forunderwater acoustic testbeds,” in Proc. CMRE UComms, 2014.
[23] S. Zhu and X. Zhang, “Enabling high-precision visible lightlocalization in today’s buildings,” in Proc. ACM MobiSys, 2017.
[24] A. Ballew, S. Srivastava, N. Valtchanov, C. C. Lee, and A. Kuz-manovic, “Characterization of vision-aided indoor localizationand landmark routing,” in Proc. IMIS, 2012.
[25] R. Nandakumar, K. K. Chintalapudi, and V. N. Padmanabhan,“Centaur: Locating devices in an office environment,” in Proc.ACM MobiCom, 2012.
[26] H. Liu, Y. Gan, J. Yang, S. Sidhom, Y. Wang, Y. Chen, and F. Ye,“Push the limit of WiFi based localization for smartphones,” inProc. ACM MobiCom, 2012.
[27] J. Jun, Y. Gu, L. Cheng, B. Lu, J. Sun, T. Zhu, and J. Niu, “Social-Loc: Improving indoor localization with social sensing,” in Proc.ACM SenSys, 2013.
[28] F. Dovis, C. F. Chiasserini, L. Musumeci, and C. Borgiattino,“Context-aware peer-to-peer and cooperative positioning,” inProc. ICL-GNSS, 2014.
[29] J. Kwak, J. Kim, and S. Chong, “Energy-optimal collaborativeGPS localization with short range communication,” in Proc.WiOpt, 2013.
[30] T. Higuchi, S. Fujii, H. Yamaguchi, and T. Higashino, “Mobilenode localization focusing on stop-and-go behavior of indoorpedestrians,” IEEE Trans. Mobile Comput., vol. 13, no. 7, pp. 1564–1578, July 2014.
[31] J. Chen, D. Steinmetzer, J. Classen, E. Knightly, and M. Hollick,“Pseudo lateration: Millimeter-wave localization using a singleRF chain,” in Proc. IEEE WCNC, 2017.
[32] W. Gong and J. Liu, “SiFi: Pushing the limit of time-based WiFilocalization using a single commodity access point,” Proc. ACMInteract. Mob. Wearable Ubiquitous Technol., vol. 2, no. 1, pp. 10:1–10:21, Mar. 2018.
[33] M. E. C. Ali, H. Artail, and Y. Nasser, “A cooperative androadside unit-aided localization scheme for vehicular ad hocnetworks,” in Proc. ICECTA, 2017.
[34] D. Niculescu and B. Nath, “Ad hoc positioning system (APS)using AOA,” in Proc. IEEE INFOCOM, 2003.
[35] G. Bielsa, J. Palacios, A. Loch, D. Steinmetzer, P. Casari, andJ. Widmer, “Indoor localization using commercial off-the-shelf 60ghz access points,” 2018.
[36] Y. Xie, Y. Zhang, J. C. Liando, and M. Li, “Swan: Stitched wi-fiantennas,” in Proc. ACM MobiCom, 2018.
[37] Y. Wen, X. Tian, X. Wang, and S. Lu, “Fundamental limits of RSSfingerprinting based indoor localization,” in Proc. IEEE INFO-COM, 2015.
[38] I. T. Haque and C. Assi, “Profiling-based indoor localizationschemes,” IEEE Syst. J., vol. 9, no. 1, pp. 76–85, March 2015.
[39] N. Swangmuang and P. Krishnamurthy, “An effective locationfingerprint model for wireless indoor localization,” PervasiveMob. Comput., vol. 4, no. 6, pp. 836–850, Dec. 2008.
[40] C. Gao, Z. Yu, Y. Wei, S. Russell, and Y. Guan, “A statisticalindoor localization method for supporting location-based accesscontrol,” Mob. Netw. Appl., vol. 14, no. 2, pp. 253–263, Apr. 2009.
[41] W. Sun, J. Liu, C. Wu, Z. Yang, X. Zhang, and Y. Liu, “Moloc: Ondistinguishing fingerprint twins,” in Proc. IEEE ICDCS, 2013.
[42] Y. Zhang and K. Psounis, “Efficient mu-mimo via switched-beamantennas,” in Proc. ACM Mobihoc, 2017.
[43] A. Michaloliakos, W. C. Ao, K. Psounis, and Y. Zhang, “Asyn-chronously coordinated multi-timescale beamforming architec-ture for multi-cell networks,” IEEE/ACM Trans. Netw., vol. PP,no. 99, pp. 1–15, 2017.
[44] R. Schmidt, “Multiple emitter location and signal parameterestimation,” IEEE Trans. Antennas Propag., vol. 34, no. 3, pp. 276–280, Mar 1986.
[45] M. Passafiume, S. Maddio, A. Cidronali, and G. Manes, “MUSICalgorithm for RSSI-based DoA estimation on standard IEEE802.11/802.15. x systems,” World Sci. Eng. Acad. Soc. Trans. SignalProcess, vol. 11, pp. 58–68, 2015.
[46] Y.-C. Chen, J.-R. Chiang, H.-h. Chu, P. Huang, and A. W. Tsui,“Sensor-assisted wi-fi indoor location system for adapting toenvironmental dynamics,” in Proc. ACM MSWiM, 2005.
[47] X. Y. Liu, S. Aeron, V. Aggarwal, X. Wang, and M. Y. Wu,“Adaptive sampling of RF fingerprints for fine-grained indoorlocalization,” IEEE Trans. Mobile Comput., vol. 15, no. 10, pp. 2411–2423, Oct 2016.
[48] Z.-P. Jiang, W. Xi, X. Li, S. Tang, J.-Z. Zhao, J.-S. Han, K. Zhao,Z. Wang, and B. Xiao, “Communicating is crowdsourcing: Wi-Fiindoor localization with CSI-based speed estimation,” Journal ofComputer Science and Technology, vol. 29, no. 4, pp. 589–604, 2014.
[49] T. Guan, L. Fang, W. Dong, D. Koutsonikolas, G. Challen, andC. Qiao, “Robust, cost-effective and scalable localization in largeindoor areas,” Computer Networks, vol. 120, pp. 43 – 55, 2017.
[50] J. Zhu, K. Zeng, K. H. Kim, and P. Mohapatra, “Improving crowd-sourced Wi-Fi localization systems using Bluetooth beacons,” inProc. IEEE SECON, 2012.
[51] I. Guvenc and C. C. Chong, “A survey on TOA based wirelesslocalization and NLOS mitigation techniques,” IEEE Commun.Surveys Tuts., vol. 11, no. 3, pp. 107–124, rd 2009.
[52] A. T. Mariakakis, S. Sen, J. Lee, and K.-H. Kim, “SAIL: Singleaccess point-based indoor localization,” in Proc. ACM MobiSys,2014.
[53] J. Xiong, K. Sundaresan, and K. Jamieson, “Tonetrack: Leveragingfrequency-agile radios for time-based indoor wireless localiza-tion,” in Proc. ACM MobiCom, 2015.
[54] A. Yassin, Y. Nasser, M. Awad, A. Al-Dubai, R. Liu, C. Yuen,R. Raulefs, and E. Aboutanios, “Recent advances in indoor lo-calization: A survey on theoretical approaches and applications,”IEEE Commun. Surveys Tuts., vol. 19, no. 2, pp. 1327–1346, Sec-ondquarter 2017.
[55] Z. Farid, R. Nordin, and M. Ismail, “Recent advances in wirelessindoor localization techniques and system,” Journal of ComputerNetworks and Communications, vol. 2013, 2013.
[56] Y. Gao, J. Niu, R. Zhou, and G. Xing, “Zifind: Exploiting cross-technology interference signatures for energy-efficient indoorlocalization,” in Proc. IEEE INFOCOM, 2013.
[57] S. He and S. H. G. Chan, “Wi-Fi fingerprint-based indoor po-sitioning: Recent advances and comparisons,” IEEE Commun.Surveys Tuts., vol. 18, no. 1, pp. 466–490, Firstquarter 2016.
[58] Y. Kim, H. Shin, and H. Cha, “Smartphone-based Wi-Fipedestrian-tracking system tolerating the RSS variance problem,”in Proc. IEEE PerCom, 2012.
[59] G. Shen, Z. Chen, P. Zhang, T. Moscibroda, and Y. Zhang,“Walkie-Markie: Indoor pathway mapping made easy,” in Proc.USENIX NSDI, 2013.
[60] H. Wang, S. Sen, A. Elgohary, M. Farid, M. Youssef, and R. R.Choudhury, “No need to war-drive: Unsupervised indoor local-ization,” in Proc. ACM MobiSys, 2012.
[61] S. He and S. H. G. Chan, “Sectjunction: Wi-Fi indoor localizationbased on junction of signal sectors,” in Proc. IEEE ICC, 2014.
[62] Y. Jiang, Y. Xiang, X. Pan, K. Li, Q. Lv, R. P. Dick, L. Shang,and M. Hannigan, “Hallway based automatic indoor floorplanconstruction using room fingerprints,” in Proc. ACM UbiComp,2013.
[63] A. Rai, K. K. Chintalapudi, V. N. Padmanabhan, and R. Sen, “Zee:Zero-effort crowdsourcing for indoor localization,” in Proc. ACMMobiCom, 2012.
[64] S. Hilsenbeck, D. Bobkov, G. Schroth, R. Huitl, and E. Steinbach,“Graph-based data fusion of pedometer and WiFi measurementsfor mobile indoor positioning,” in Proc. ACM UbiComp, 2014.
[65] Z. Xiao, H. Wen, A. Markham, and N. Trigoni, “Lightweightmap matching for indoor localisation using conditional randomfields,” in Proc. ACM/IEEE IPSN, 2014.
[66] J. Seitz, J. Jahn, J. G. Boronat, T. Vaupel, S. Meyer, and J. Thielecke,in Proc. ISIF FUSION, 2010.
[67] J. Niu, B. Wang, L. Shu, T. Q. Duong, and Y. Chen, “Zil: Anenergy-efficient indoor localization system using zigbee radio todetect wifi fingerprints,” IEEE J. Sel. Areas Commun., vol. 33, no. 7,pp. 1431–1442, July 2015.
[68] L. Kanaris, A. Kokkinis, M. Raspopoulos, A. Liotta, andS. Stavrou, “Improving RSS fingerprint-based localization usingdirectional antennas,” in Proc. EuCAP, 2014.

15
[69] R. Guzman-Quiros, A. Martınez-Sala, J. L. Gomez-Tornero, andJ. Garcıa-Haro, “Integration of directional antennas in an RSSfingerprinting-based indoor localization system,” Sensors, vol. 16,no. 1, p. 4, 2015.
[70] E. Kupershtein, M. Wax, and I. Cohen, “Single-site emitter local-ization via multipath fingerprinting,” IEEE Trans. Signal Process.,vol. 61, no. 1, pp. 10–21, Jan 2013.
[71] J. H. Winters, “Smart antennas for wireless systems,” IEEE Per-sonal Communications, vol. 5, no. 1, pp. 23–27, Feb 1998.
[72] M. Lai, T. Wu, J. Hsieh, C. Wang, and S. Jeng, “Compact switched-beam antenna employing a four-element slot antenna array fordigital home applications,” IEEE Trans. Antennas Propag., vol. 56,no. 9, pp. 2929–2936, Sept 2008.
[73] L. Petit, L. Dussopt, and J. . Laheurte, “Mems-switched parasitic-antenna array for radiation pattern diversity,” IEEE Trans. Anten-nas Propag., vol. 54, no. 9, pp. 2624–2631, Sept 2006.
[74] M.-J. Ho, G. L. Stuber, and M. D. Austin, “Performance ofswitched-beam smart antennas for cellular radio systems,” IEEETrans. Veh. Technol., vol. 47, no. 1, pp. 10–19, Feb 1998.
[75] M. Chryssomallis, “Smart antennas,” IEEE Antennas Propag. Mag.,vol. 42, no. 3, pp. 129–136, June 2000.
[76] “TensorFlow.” [Online]. Available: www.tensorflow.org[77] “WARP project,” 2017. [Online]. Available: http://warpproject.
org[78] Adant Tech. Inc., “Adant STAR160 (white paper),” 2016, www.
adant.com.[79] A. F. Molisch, Wireless communications. John Wiley & Sons, 2007.[80] “Softmax function.” [Online]. Available: en.wikipedia.org/wiki/
Softmax function[81] S. Haykin, Neural Networks: A Comprehensive Foundation, 2nd ed.
Prentice Hall PTR, 1998.[82] C. Morelli, M. Nicoli, V. Rampa, and U. Spagnolini, “Hidden
markov models for radio localization in mixed los/nlos condi-tions,” IEEE Trans. Signal Process., vol. 55, no. 4, pp. 1525–1542,April 2007.
[83] F. Adib, Z. Kabelac, D. Katabi, and R. C. Miller, “3d tracking viabody radio reflections,” in NSDI, 2014.
[84] J. Liu, R. Chen, L. Pei, W. Chen, T. Tenhunen, H. Kuusniemi,T. Krger, and Y. Chen, “Accelerometer assisted robust wire-less signal positioning based on a hidden markov model,” inIEEE/ION Position, Location and Navigation Symposium, May 2010.
[85] “Hidden Markov model.” [Online]. Available: en.wikipedia.org/wiki/Hidden Markov model
[86] L. E. Baum and T. Petrie, “Statistical inference for probabilisticfunctions of finite state Markov chains,” The annals of mathematicalstatistics, vol. 37, no. 6, pp. 1554–1563, 1966.
[87] A. Viterbi, “Error bounds for convolutional codes and an asymp-totically optimum decoding algorithm,” IEEE Trans. Inf. Theory,vol. 13, no. 2, pp. 260–269, April 1967.
[88] G. D. Forney, “The Viterbi algorithm,” Proceedings of the IEEE,vol. 61, no. 3, pp. 268–278, March 1973.
[89] L. R. Rabiner, “A tutorial on hidden Markov models and se-lected applications in speech recognition,” Proceedings of the IEEE,vol. 77, no. 2, pp. 257–286, Feb 1989.
[90] J. Xiao, K. Wu, Y. Yi, and L. M. Ni, “FIFS: Fine-grained indoorfingerprinting system,” in Proc. ICCCN, 2012.
[91] M. M. Atia, A. Noureldin, and M. J. Korenberg, “Dynamic online-calibrated radio maps for indoor positioning in wireless local areanetworks,” IEEE Trans. Mobile Comput., vol. 12, no. 9, pp. 1774–1787, Sept 2013.
[92] K. Chang and D. Han, “Crowdsourcing-based radio map up-date automation for Wi-fi positioning systems,” in Proc. ACMGeoCrowd, 2014.
[93] J. Yin, Q. Yang, and L. Ni, “Adaptive temporal radio maps forindoor location estimation,” in Proc. IEEE PerCom, 2005.
[94] D. B. Skalak, “Prototype and feature selection by sampling andrandom mutation hill climbing algorithms,” in Machine LearningProceedings 1994. Elsevier, 1994, pp. 293–301.
[95] R. Kohavi and G. H. John, “Wrappers for feature subset selec-tion,” Artificial intelligence, vol. 97, no. 1-2, pp. 273–324, 1997.
[96] M. A. Hall, “Correlation-based feature selection of discrete andnumeric class machine learning,” 2000.
[97] J. Gjengset, J. Xiong, G. McPhillips, and K. Jamieson, “Phaser:Enabling phased array signal processing on commodity Wi-Fiaccess points,” GetMobile: Mobile Comp. and Comm., vol. 19, no. 2,pp. 6–9, Aug. 2015.
[98] S. Sen, J. Lee, K.-H. Kim, and P. Congdon, “Avoiding multipathto revive inbuilding WiFi localization,” in Proc. ACM MobiSys,2013.
[99] H. Rahul, H. Hassanieh, and D. Katabi, “SourceSync: A dis-tributed wireless architecture for exploiting sender diversity,” inProc. ACM SIGCOMM, 2010.
[100] Broadcom Inc. (2008) Strataxgsiv white paper. [Online].Available: docs.broadcom.com/docs/1211168567832





![On the Planarization of Wireless Sensor Networks...to obtain accurate location measurements via expensive localization devices (e.g., GPS) or localization algorithms [3]. No efficient](https://img.pdfslide.net/doc/110x75/603a72fdd2750a4185145d94/on-the-planarization-of-wireless-sensor-networks-to-obtain-accurate-location.jpg)