Embed Size (px)
Citation preview

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 1
1. Introducción. Definición de señales y sistemas
1.1 El papel de este curso en el programa curricular de ingeniería electrónica
Quienes toman este curso (en la Universidad Distrital) inician su sexto semestre de ingeniería
electrónica, por lo que merecen una gran felicitación pues acaban de superar la primera mitad de su
carrera (que, en la Universidad Distrital, toma 10 semestres). Sin embargo, suele ocurrir que,
cuando se les pregunta ¿qué es la ingeniería electrónica?, casi nadie ofrece una definición precisa y
clara de la profesión que escogió estudiar, a pesar de estar en un estado tan avanzado de sus
estudios. Aun así, si se recogen varios de los elementos que los estudiantes aportan tentativa y
tímidamente, se puede ir construyendo una aproximación a la definición de la ingeniería electrónica
que, al final, suele ser parecida a la siguiente:
La ingeniería electrónica es una profesión (esto es, un conjunto de conocimientos,
habilidades y formas de enfrentar un tipo particular de problemas con el propósito de
facilitar la vida de las personas) que aplica los principios físicos del electromagnetismo
y la mecánica cuántica para el diseño, construcción, operación y mantenimiento de
estructuras, máquinas, aparatos y procesos, de manera que se conozca su
comportamiento bajo condiciones de operación específicas, con niveles de seguridad
específicos y con costos mínimos. Hasta aquí, no se diferencia de la ingeniería eléctrica.
Sin embargo, mientras la ingeniería eléctrica utiliza estos principios con el propósito de
generar, convertir, distribuir y controlar energía, el ingeniero electrónico los utiliza con
el propósito de capturar, almacenar, transmitir y procesar información.
Una pregunta que los estudiantes sí responden con mayor entusiasmo y claridad es ¿Cuál es el área
de la ingeniería electrónica que les interesa y que los motivó a estudiar esta carrera profesional?
Con las respuestas de los estudiantes se puede construir una lista:
Telecomunicaciones, ingeniería de computadores, sistemas de control, instrumentación,
componentes y microelectrónica, bio-ingeniería, telemática, conmutación, redes de comunicaciones,
tecnología para música, video (cine, televisión, multimedios), etc.
Es fácil reconocer que todas esas áreas de actuación de la ingeniería electrónica obedecen a la
definición dada y que en todas ellas la información es el objeto principal, la cual se representa
mediante señales electromagnéticas (corrientes, voltajes, campos), aunque sean transducciones de
otros tipos de señales (presiones, temperaturas, intensidades de luz, etc.). Lo interesante es que
apenas ahora, después de tres años de estudio, los estudiantes empiezan a estudiar esos temas que
eran la motivación original para decidirse por esta carrera. Entonces, ¿qué han estado estudiando
hasta ahora? Nuevamente es posible hacer una lista con las respuestas de los estudiantes:
Algunos cursos de circuitos y electrónica, bastantes cursos de física, algo de programación, inglés,
humanidades y… ¡muchos cursos de matemáticas! Algebra lineal, cálculo diferencial, cálculo
integral, cálculo vectorial, variable compleja, ecuaciones diferenciales, análisis de Fourier,
probabilidades y estadística, etc. Ante semejante formación que han tenido, se espera que les quede

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 2
muy fácil resolver un problema de regla de tres: Si yo lavo mi carro en 15 minutos y mi hijo lo lava
en media hora ¿cuánto tiempo tardamos entre los dos? Suele suceder que muy pocos estudiantes
logran resolverlo en menos de cinco minutos… ¡Y algunos estudiantes tardan más de quince
minutos! ¿A qué se debe? ¿De qué sirvió estudiar tanta matemática que los volvió muy buenos en
calcular integrales muy complejas y en resolver sistemas de ecuaciones diferenciales parciales de
orden superior y condiciones de frontera, pero los hizo olvidar cómo plantear un problema de regla
de tres, lo cual ya sabían hacer en tercero de primaria? ¿Cuán útil ha sido, entonces, lo que han
aprendido en los primeros cinco semestres? ¿Han aprendido a pensar como ingenieros? ¿Qué
implicaciones tendrá en su actitud como estudiantes de ingeniería electrónica el descubrir que,
después de cinco semestres, no sabían qué es la ingeniería electrónica y que los muchos cursos de
matemáticas avanzadas para ingeniería sólo han servido para olvidar cómo formular problemas de
regla de tres? Más sorprendente resulta notar que, si el mismo problema se les propone en términos
de resistencias, corrientes y voltajes, todos lo hubieran resuelto correctamente en pocos segundos
(Si conecto en paralelo una resistencia de 30 ohmios y una resistencia de 15 ohmios, ¿cuál es la
resistencia equivalente?) ¿Será que nos han formado demasiado tiempo en la solución de ejercicios
matemáticos y no en la formulación matemática de problemas de ingeniería (¡o de la vida
cotidiana!)?1
Figura 1. Dos problemas conceptualmente idénticos que un estudiante no debería tardar en asociar
Pues bien, este curso conecta todo lo que hemos visto hasta ahora en una teoría básica que se
constituye en el fundamento de todas las áreas de especialidad de la ingeniería electrónica, para
darle sentido a todo lo que hemos estudiado, no como maquinitas de resolver ecuaciones
diferenciales, de calcular integrales o de invertir matrices, sino como ingenieros, con pensamiento
crítico, capaces de relacionar nuestro conocimiento previo con cualquier nuevo conocimiento,
mediante procesos lógicos de deducción, inferencia o inducción, y con capacidad argumentativa
para describir nuestros procesos lógicos (ver Figura 2).
1 Es interesante también notar que algunos estudiantes, brillantes y un tanto perezosos, ponen en duda los
postulados de una formulación lineal como la de la regla de tres. Como dice S. Harris
(http://www.sciencecartoonsplus.com/index.php): "Si 40 granjeros amish construyen un granero en 8 horas,
1280 granjeros lo construirán en 15 minutos"

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 3
Figura 2. El análisis de señales es la cintura del gran reloj de arena en la formación de un ingeniero electrónico
Si bien en los cursos de matemáticas que hasta ahora hemos tomado se nos ha ejercitado en técnicas
de solución de ecuaciones (derivación, integración, ecuaciones diferenciales, etc.), ahora debemos
entrenarnos en formular los problemas de la ingeniería en lenguaje matemático mediante la
construcción de modelos matemáticos que podamos analizar con las técnicas aprendidas para
trasladar la solución del modelo al sistema real que se pretendía analizar o diseñar, como muestra la
Figura 3.
Para terminar esta sección, se ha de leer, analizar y discutir el syllabus del curso, que se encuentra
en http://comunidad.udistrital.edu.co/malzate, indicando que allí se dispondrá de las tareas y de
otros recursos (como este documento).
Comunica-ciones
Control
Bioinge-niería
Computa-dores
TelemáticaInstrumen-
taciónCompo-nentes
Algeabralineal
Fourier
Cálculo diferencial
Cálculo integralCálculo
vectorial Ecuaciones diferenciales
Variable compleja
Análisis de señales

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 4
Figura 3. Proceso de la conceptualización matemática en ingeniería
1.2 Definición de señal
En esta sección presentamos algunas señales para considerar qué es lo que vamos a estudiar durante
el curso (Las señales están en http://comunidad.udistrital.edu.co/malzate).
La primera de ellas (Figura 4) corresponde al número de manchas en el sol, promediadas cada mes
desde enero de 1749 hasta julio de 2012. Una mancha es una región del Sol con una temperatura
más baja que sus alrededores debido a una intensa actividad magnética. En cada mancha, que puede
alcanzar una extensión de hasta 12000 kilómetros, la temperatura es de cerca de 4000K, bastante
frío comparado con sus alrededores, donde la corona del sol alcanza cerca de 6000K. En la figura se
puede observar cierto tipo de periodicidad, pues aproximadamente cada 11 años se presenta un pico
en la actividad de las tormentas magnéticas del sol.
Sistema Físico real
Modelamiento matemático de
señales y sistemas
Técnicas de solución de
modelos matemáticos
Conceptualización,Abstracción
Comunica-ciones
Control
Bioinge-niería
Computa-dores
TelemáticaInstrumen-
taciónCompo-nentes
Algeabralineal
Fourier
Cálculo diferencial
Cálculo integralCálculo
vectorial Ecuaciones diferenciales
Variable compleja
Análisis de señales

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 5
Figura 4. Manchas en el sol desde enero de 1749 hasta julio de 2012
(http://solarscience.msfc.nasa.gov/greenwch/spot_num.txt)
La segunda señal (Figura 5) representa el pulso de eco-localización emitido por un murciélago
(eptesicus fuscus). Los murciélagos usan un sonar biológico mediante el cual emiten un pulso de
ultrasonido y escuchan los ecos devueltos por los objetos en su medio ambiente, logrando ubicar e
identificar estos objetos en completa oscuridad. De esta manera, miles de murciélagos son capaces
de navegar en cuevas oscuras sin chocar entre ellos ni con las paredes e, incluso, logran capturar
insectos en el aire a partir de los ecos de sus propios pulsos. Nótese cómo la frecuencia de la señal
emitida se va reduciendo desde cerca de 40 kHz hasta cerca de 20 KHz, en sólo 2.5 ms.
Figura 5. Señal de ecolocalización de un murciélago (http://spib.rice.edu/spib/data/signals/bio/batecho.html)
1750 1800 1850 1900 1950 20000
50
100
150
200
250
Manchas en el sol, cada mes, desde enero de 1749 hasta julio de 2012
Núm
ero
de m
anchas
año
0 0.5 1 1.5 2 2.5
x 10-3
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
Señal de ecolocalización de un murciélago
tiempo en segundos
Am
plit
ud

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 6
La tercera señal (Figura 6) representa el sonido producido por un grupo de grillos en un atardecer.
Este sonido lo producen los machos frotando los bordes de sus alas (no es cierto que sea frotando
sus patas traseras), para llamar la atención de las hembras. Los grillos vecinos sincronizan sus
sonidos para hacer un sonido más atractivo para las hembras, lo cual es muy sorprendente si se tiene
en cuenta que, sin un director de orquesta, un grupo de seres humanos entrenados por décadas en
conservatorios no se puede sincronizar, a pesar del inmenso cerebro que posee cada individuo.
Figura 6. Sonido de grillos (http://spib.ece.rice.edu/spib/data/signals/bio/crickets.wav)
La cuarta señal (Figura 7) muestra las amplitudes de los componentes en fase (I) y en cuadratura
(Q) de la señal 16QAM recibida por un modem V.29. En el transmisor se usan 16 combinaciones
lineales de dos portadoras, I(t)=Acos(ct) y Q(t)=Asen(ct), donde la segunda está en cuadratura
de fase respecto a la primera (un desfase de /2 radianes). Cada combinación representa cuatro bits
de información. Al graficar el coeficiente de I(t) en el eje horizontal y el coeficiente de Q(t) en el
eje vertical, se tiene el diagrama de constelación de la técnica de modulación 16QAM. Sin embargo,
al pasar por el canal, estas señales sufren distorsiones y se contaminan con ruido, de manera que en
el modem receptor se obtiene un diagrama semejante al de la señal mostrada. Aunque parezca un
milagro, el modem receptor es capaz de inferir, a partir de esta señal, la secuencia de unos y ceros
en el transmisor que dieron origen a dicha señal, gracias al cuidadoso proceso de codificación con
que se genero la señal transmitida.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Sonido de grillos
tiempo en segundos
Am
plit
ud

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 7
Figura 7. Diagrama IQ de una señal V.29 (http://spib.linse.ufsc.br/modem.html)
La quinta señal (Figura 8) muestra un segmento de una señal electrocardiográfica. El latido cardíaco
se debe a una actividad bio-eléctrica que permite la sucesión periódica y ordenada de contracciones
para bombear la sangre. Esta actividad se puede capturar mediante sensores apropiados para
determinar si el corazón funciona normalmente o sufre de alguna anomalía. Por ejemplo, en la señal
mostrada, se nota algunos latidos adicionales que contrastan con algunos latidos suprimidos, lo cual
constituye una arritmia cardiaca. Muchos otros diagnósticos adicionales se pueden conseguir a
partir de la misma forma de onda de los impulsos.
Figura 8. Electrocardiograma de un adulto (Erik Traasdahl, Institute of Medical Biology, University of Tromso, Norway)
La sexta señal (Figura 9) es un fragmento de voz humana capturada desde un micrófono. La señal
de voz es una variación de presión en el aire que viaja como una onda longitudinal desde la boca del
hablante hasta el oído de quien lo escucha, como muestra la Figura 10. Lo más fascinante de esta
señal de voz es que empieza con una idea o un pensamiento que el hablante quiere comunicar a
alguien, para lo cual la convierte en una forma lingüística con estructuras gramaticales, sintácticas,
semánticas y prosódicas específicas, a partir de las cuales el cerebro genera comandos motores a los
-1.5 -1 -0.5 0 0.5 1 1.5
-1.5
-1
-0.5
0
0.5
1
1.5
Señal recibida por un modem V.29 a 9600 bps
Parte real
Part
e im
agin
aria
0 2 4 6 8 10 12 14 16 18 20
-1500
-1000
-500
0
500
1000
1500
Electrocardiograma de un adulto
Tiempo, en segundos
Am
plit
ud

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 8
diferentes músculos que intervienen en la generación de la onda de presión deseada (diafragma,
cuerdas vocales, velo del paladar, quijada, lengua, labios…). La onda de presión hace vibrar el
tímpano de quien escucha, vibración que es filtrada por los huesecillos (yunque, estribo y martillo)
para hacer vibrar el caracol, donde más de diez mil células ciliares ejecutan un análisis espectral con
más de diez mil bandas para producir impulsos eléctricos en el nervio auditivo. De esta secuencia
de impulsos el cerebro extrae no sólo la idea que el hablante quiso extraer (tal vez conceptos tan
importantes como amistad, felicidad, amor o, simplemente, triángulo), sino mucha información
adicional (el sexo, la edad y el estado de ánimo del hablante, entre otras).
Figura 9. Voz femenina
Figura 10. Proceso de producción y comprensión de señales de v oz
La séptima señal (Figura 11) representa la longitud en bytes de los archivos del disco duro de un
computador personal. El rango dinámico de esta señal sugiere presentarla en escala logarítmica,
pues va desde las unidades hasta los miles de millones. Nótense dos características interesantes: Si
vemos con detalle una porción de la señal (por ejemplo, los archivos 110.000 a 140.000) veremos
una figura similar a la señal completa, excepto por las escalas en los ejes. Las señales que tienen
esta propiedad se conocen como señales auto-similares o, vistas como objetos geométricos,
fractales. En particular, es fácil notar que, aunque la mayoría de archivos son pequeños, la mayor
cantidad de espacio en el disco duro está ocupada por los poquitos archivos gigantescos y no por los
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Voz femenina
tiempo en segundos
Am
plit
ud

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 9
muchos archivos pequeños. A este comportamiento de las señales auto-similares se le denomina
Ley de Potencia.
Figura 11. Longitud de los archivos en un disco duro
La octava señal (Figura 12) es una imagen. Está compuesta por un arreglo de 512512 elementos
(pixels –picture elements), cada uno de los cuales tiene un valor entero entre 0 y 255. Si el valor de
cada pixel se asocia con un tono de gris, donde 0 significa negro y 255 significa blanco, se obtiene
la representación mostrada. Se trata de una fotografía de Lena Söderberg, la playmate de noviembre
de 1972, foto que se ha convertido en una imagen estándar para comparar algoritmos de
procesamiento digital de imágenes. En efecto, la imagen contiene una mezcla interesante de detalles
como texturas, sombras, contrastes, regiones planas de baja frecuencia, regiones de alta frecuencia
como las plumas del sombrero, reflexiones especulares de porciones de la imagen, etc. Estas
propiedades se pueden apreciar con claridad si graficamos el valor de cada pixel en un tercer eje
tridimensional, como muestra la Figura 13. Dos datos curiosos: (1) Lena fue invitada de honor a la
quincuagésima conferencia anual de la Sociedad de Ciencia de las Imágenes en 1997 y (2) Playboy
renuncio a reclamar sus derechos de copyright porque el número de noviembre de 1972 ha sido el
número más vendido en toda su historia, superando por mucho a los números donde aparecen
grandes celebridades.
0.5 1 1.5 2 2.5
x 105
0
1
2
3
4
5
6
7
8
9
x 108 Longitud de archivos en mi disco duro
Número de archivo
Tam
año e
n b
yte
s
0 0.5 1 1.5 2 2.5
x 105
0
1
2
3
4
5
6
7
8
9Logaritmo de la longitud de los archivos en mi disco duro
Número de archivo
logaritm
o d
el T
am
año e
n b
yte
s

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 10
Figura 12. Imagen de Lena (http://sipi.usc.edu/database/?volume=misc (4.2.04))
Figura 13. Otra forma de ver la imagen de Lena
Lena
50 100 150 200 250 300 350 400 450 500
50
100
150
200
250
300
350
400
450
500

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 11
La novena señal (Figura 14) muestra los intervalos entre disparos neuronales sucesivos en el nervio
auditivo cuando se escucha un tono de 1000 Hz. Como mencionamos al hablar de la señal de voz,
las señales sensoriales llegan al cerebro como secuencias de disparos neuronales para su
interpretación. Es interesante que una forma de onda tan sencilla llegue al cerebro codificada como
una señal tan compleja. Primero hay una captación mecánica en la que las orejas dirigen la señal de
audio hacia el tímpano a través del conducto auditivo. La oreja y el canal auditivo producen efectos
de difracción y filtrado que varían según el ángulo de incidencia, por lo que la señal nerviosa de la
figura incluye información codificada sobre la procedencia del sonido. La vibración del tímpano se
transmite a lo largo de una cadena de pequeños huesos (yunque, martillo y estribo), que forman
unas palancas para acoplar la resistencia mecánica del aire con la resistencia mecánica del fluido
que se encuentra dentro del caracol. En efecto, en el caracol se transforma la vibración del aire a
vibraciones de un fluido en el que se encuentran sumergidas parte de las células ciliares, las cuales
hacen un análisis espectral de la señal (cada una de ellas es un filtro sintonizado en una banda
diferente), y se encargan de la transducción de vibración mecánica del fluido a impulsos nerviosos,
que son los captados en la señal que se muestra en la figura.
Figura 14. Descargas neuronales (Teich, Johnson, Kumar, and Turcott, "Fractional power law behavior of single units
in the lower auditory system", Hearing Res., 46: 41-52, May 1990)
La penúltima señal (Figura 15) corresponde a la variación diaria durante un año del índice bursátil
S&P 500 –Standard and Poor's 500–, el cual refleja las variaciones de rentabilidad de las 500
compañías más grandes de Estados Unidos que cotizan en la bolsa de Nueva York.
2 4 6 8 10 12
x 104
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
Intervalos entre descargas de una neurona que responde a un estímulo auditivo
Descarga
Inte
rvalo
, en s
egundos

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 12
Figura 15. Indicador económico (http://finance.yahoo.com)
La última señal (Figura 16) indica cuántos bytes permanecen en el buffer de un multiplexor en una
red de comunicaciones durante una hora. Cuando un paquete de datos llega a este dispositivo, puede
encontrar ocupado el enlace de salida que le corresponde, en cuyo caso el paquete deberá esperar en
una cola su turno de transmisión. La longitud de la cola, en bytes, es un indicador importante del
desempeño de la red.
La longitud de los archivos en el disco duro de un PC (Figura 11), los disparos neuronales en un
nervio auditivo (Figura 14), las señales econométricas de índices bursátiles (Figura 15), y la
longitud en bytes del buffer de un enrutador en internet (Figura 16) comparten las características de
fractalidad que mencionábamos al describir las longitudes de los archivos. Esta es una característica
común en muchas señales de la naturaleza, indicadora de procesos complejos en los sistemas
dinámicos que las generan.
50 100 150 200 250
1050
1100
1150
1200
1250
Indice S&P durante los días no feriados de 2010
día
Valo
r de c
ierr
e

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 13
Figura 16. Número de bytes en la cola de un multiplexor en Internet
Habiendo visto las anteriores once señales como ejemplos del tipo de objetos que estudiaremos en
este curso, surge una pregunta fundamental: Con señales de naturaleza tan distinta ¿Cómo
podremos asociar un único modelo matemático que nos sirva para construir una teoría unificada de
señales y sistemas? Se puede notar que todas las señales vistas corresponden a la gráfica de una
magnitud física (o varias) con respecto a otra (u otras): Número de manchas en el sol graficada con
respecto a cada uno de los meses de un período de 263 años, o la intensidad lumínica de un pixel
con respecto a su posición en coordenadas (x,y), o el intervalo entre disparos de una neurona
auditiva con respecto al número de disparo. Al poner a los estudiantes a discutir qué es una señal a
la luz de estos ejemplos, es posible construir, con las propuestas que se escuchan, una definición
como la siguiente:
Una señal es una cantidad física que varía en el tiempo, en el espacio, o con respecto
a cualquier otra cantidad física, de manera que en sus variaciones hay codificada
una información.
Esta definición se ajusta bien a cada una de las señales vistas anteriormente, lo cual habla del
altísimo grado de abstracción que se logra con esta definición. Pero aún nos deja perplejos porque
no imaginamos cómo estudiar una teoría que resulte común para un voltaje en un circuito, o para
unos intervalos entre disparos sucesivos de una neurona auditiva, o para las variaciones de los
precios en la bolsa de valores. Para ello necesitamos, por supuesto, como quedó claro en la primera
parte de esta clase, un modelo matemático que se ajuste igualmente bien a todas las señales
anteriores. Dada la definición conceptual de señal que acabamos de construir con los aportes de los
estudiantes, es apenas razonable considerar el siguiente modelo matemático como una extensión
natural de la definición:
500 1000 1500 2000 2500 30000
1
2
3
4
5
x 106 Longitud de la cola en bytes
Tiempo en segundos
Num
ero
de b
yte
s e
n c
ola

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 14
Una señal se representa mediante una función con un dominio y un rango
específicos, x:DR.
El dominio se refiere al conjunto de valores que puede tomar la magnitud independiente. Dicho
dominio puede corresponder a la variable escalar tiempo, como en la señal de las manchas del sol o
la señal de eco-localización del murciélago, aunque también puede tomar otros significados como el
número de descarga neuronal o la posición horizontal y vertical de un pixel en una imagen. Las
siguientes pueden ser algunas representaciones válidas de las señales vistas (ℤ es el conjunto de los
enteros, ℝ es el conjunto de los reales):
a. Número de manchas en el sol, longitud de archivos, x: ℤ ℤ
b. Señal de eco-localización de un murciélago, sonido de grillos, señal recibida por un módem
V.29 a 9600 bps, electrocardiograma de un adulto, voz femenina, x: ℝ ℝ
c. Imagen de Lena, x: ℤ ℤ ℤ (AB es el producto cartesiano entre los con juntos A y B,
compuesto por todas las parejas que se puedan formar entre sus mienbros, AB = {(a,b) :
aA, bB}
d. Intervalos entre descargas de una neurona que responde a un estímulo auditivo, índice S&P,
x: ℤ ℝ
f. Número de paquetes en el buffer de un enrutador en cada instante de tiempo: x: ℝ ℤ
Las señales tendrán unidades genéricas de “amplitud” y el dominio podrá ser cualquier conjunto al
que llamaremos “tiempo”, a pesar de que pueda representar cualquier otra cantidad (como en la
imagen de Lena o en la señal de los impulsos neuronales).
De otro lado, sólo consideraremos dominios continuos (contenidos en ℝ) o discretos (contenidos en
ℤ) y rangos continuos (contenidos en ℝ o ℂ, donde ℂ es el conjunto de los números complejos) o
discretos (contenidos en ℤ). En cada caso, las señales toman nombres particulares, como muestra la
Tabla 1. Por ejemplo, la voz femenina es una señal análoga, el índice económico S&P es una señal
muestreada, la imagen de Lena es una señal digital, y el número de paquetes en el buffer de un
enrutador en una red de computadores es una señal cuantizada.
El único tipo de señales que podemos procesar con un computador es el de las señales digitales: Son
de tiempo discreto porque en cada posición de memoria podemos guardar una muestra de la señal, y
son de amplitud discreta porque en cada posición de memoria sólo podemos guardar un número
finito de posibles valores debido al tamaño en bits de la palabra almacenada. Cuando la amplitud se
representa con 8 ó 16 bits, el fenómeno de la cuantización se hace apreciable (hay 256 o 65536
posibles amplitudes, respectivamente). Pero cuando tenemos longitud de palabras de 64 bits,
podríamos representar cerca de 21019 amplitudes diferentes; por ejemplo, podríamos recorrer la vía
láctea con una resolución de 50 metros, o contar el número de átomos de hidrógeno que caben en un
millón de kilómetros. Con semejante resolución, podemos modelar estas señales como funciones en
tiempo discreto con amplitud continua. Por eso, la teoría que desarrollaremos en este curso se
refiere, principalmente, a los dos tipos de señales con amplitud continua, a las que llamaremos
“señales en tiempo continuo” (las señales análogas) y “señales de tiempo discreto” (las señales
muestreadas).

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 15
Tabla 1. Clasificación de señales según su dominio y su rango
Tiempo continuo Tiempo discreto
Amplitud
continua
Señal análoga
Señal muestreada
Amplitud
discreta
Señal cuantizada
Señal digital
Por ejemplo, considere la siguiente señal análoga:
11 si ( ) ,
10 si a
ttx t t
t
Podemos cuantizarla haciendo ( ) / 5 ( ) [2 1,2 1) /10,q ax t k si x t k k k . También
podemos muestrearla haciendo [ ] ( /10 0.05),s ax n x n n . Por último, podemos digitalizarla
si la muestreamos y la cuantizamos, [ ] ( /10 0.05)d qx n x n . Los resultados se muestran en la
Figura 17.
Nótese que las señales en tiempo discreto las hemos graficado con respecto a tn = n/10 – 0.05 y no
con respecto a n. Aunque normalmente se grafican con respecto al número de la muestra, n, hemos
preferido este cambio en el eje del tiempo para poder superponer las cuatro señales y compararlas
con mayor claridad, como muestra la Figura 18.
Hay un aspecto de notación importante para nosotros. Una señal la podemos describir como una
función que a cada elemento del conjunto dominio le asigna un elemento (y sólo uno) del conjunto
rango:
x:DR
Esto quiere decir, por ejemplo, que si tD, existe un elemento x(t)R asociado con t, lo cual se
suele representar así:
: ( )x t x t
Así pues, cuando hablamos de x(t) deberíamos tener claro que no nos referimos a la señal en general
sino al valor que la señal toma para un elemento específico tD (decimos que x(t) es el valor de la
señal en el "instante" t cuando consideramos que D es el conjunto tiempo). Desafortunadamente, en

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 16
la literatura se suele usar la misma notación x(t) para referirse tanto a la función x:DR (en cuyo
caso t se interpreta como cualquier elemento genérico de D) como al valor instantáneo x(t)R para
un valor específico tD. Aunque seguramente cometeremos el mismo "error" en nuestras clases
(¡como en la Figura 18!), cuando el contexto pueda generar confusiones intentaremos distinguir los
dos conceptos mediante la siguiente notación:
x(t) Valor específico de la señal x en el instante t
{x(t), tD} Señal completa, la función para cada valor de t en D
En algunas ocasiones, cuando necesitemos referirnos a la señal entera pero no sea necesario
determinar el conjunto dominio, usaremos la notación simplificada {x(t)}t para un dominio continuo
y {x[n]}n para un dominio discreto.
Tiempo continuo Tiempo discreto
Amplitud
continua
Señal análoga, {xa(t), tℝ}
Señal muestreada, {xs[n], nℤ}
Amplitud
discreta
Señal cuantizada, {xq(t), tℝ}
Señal digital, {xd[n], nℤ}
Figura 17. Procesos de muestreo y cuantización
-2 -1.5 -1 -0.5 0 0.5 1 1.5 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-2 -1.5 -1 -0.5 0 0.5 1 1.5 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-2 -1.5 -1 -0.5 0 0.5 1 1.5 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
-2 -1.5 -1 -0.5 0 0.5 1 1.5 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 17
Figura 18. Cuatro señales: una análoga, una cuantizada, una muestreada y una digital
El modelo de la señal como función resulta natural y, de alguna manera, es la principal abstracción
que hemos usado hasta ahora en casi todos nuestros cursos de electrónica, circuitos y física. Sin
embargo, en primer semestre también tomamos un curso de algebra lineal en el que estudiamos el
espacio tridimensional Euclidiano como un conjunto de vectores, y extendimos el concepto de
vector a cualquier número entero de dimensiones (le llamabamos "el espacio vectorial ℝN sobre el
campo escalar ℝ"). Pues bien, si consideramos conjuntos de señales con propiedades específicas,
tales como
X1 = {x:ℝℝ tal que x es continua}, X2 = {x:ℤℝ tal que x es absolutamente sumable}, etc.
veremos que esos conjuntos poseen exactamente las mismas propiedades de un espacio vectorial.
Por esta razón, se prefiere usar un modelo matemático adicional de señal que extiende el de la señal
como función y que es muy poderoso tanto conceptualmente como pragmáticamente: Las señales
como vectores. De hecho, resulta muy fácil notar que las señales en tiempo discreto definidas en un
rango finito de N muestras corresponden exactamente con el espacio vectorial Euclidiano ℝN (como
veremos desde la clase ¡Error! No se encuentra el origen de la referencia.):
ℝN = {x:Dℝ, D = {0,1,2,…,N-1}}
Otras señales, definidas sobre el dominio infinito de todos los enteros o sobre intervalos continuos
de los reales o sobre todos los reales, requieren una versión extendida del espacio vectorial
Euclidiano, al que llamaremos "espacio vectorial de Hilbert". En estos casos, representaremos una
señal simplemente como x , ya sea que se trate de una señal en tiempo discreto, {x[n]}n , o una
señal en tiempo continuo, {x(t)}t.
Debido a la familiaridad con la geometría tri-dimensional en la que vivimos, donde cada punto del
espacio físico es un vector en el espacio vectorial Euclidiano ℝ3, modelar las señales como vectores
en espacios vectoriales más generales trae mucha comprensión intuitiva a la mayoría de
procedimientos matemáticos en el procesamiento de señales, como tendremos oportunidad de
verificar cuando estudiemos esta visión geométrica de las señales. En los términos en que lo
mencionamos antes:
-2 -1.5 -1 -0.5 0 0.5 1 1.5 20
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
xa(t)
xq(t)
xs[n]
xd[n]

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 18
Una señal, representada mediante una función con un dominio y un rango
específicos, x:DR, se puede interpretar como un vector en un espacio
vectorial abstracto (espacio de Hilbert), xℋ.
A manera de ejemplo, la Figura 19 muestra una señal {x[n], n{0,1,2}} interpretada como una
función del tiempo (Figura 19(a)) o como un vector en un espacio Euclidiano (Figura 19(b)), donde
x[0]=2, x[1]=1 y x[2]=1.5. La extensión a dimensiones superiores a 3 es inmediata, y la extensión a
dimensiones infinitas la veremos a partir de la clase ¡Error! No se encuentra el origen de la
referencia.. La única diferencia entre el espacio Euclidiano N-dimensional y el espacio de las
señales representadas como funciones con dominio en ℤN y rango ℝ, es que, para N menor o igual a
3, tienen representaciones gráficas diferentes (Figura 19).
Figura 19. Dos representaciones para la señal {x[n], n{0,1,2}}
1.3 Definición de sistema
Veíamos que una señal es una cantidad física que varía en el tiempo, en el espacio, o con respecto a
cualquier otra cantidad física independiente, de manera que en sus variaciones hay codificada una
información. También vimos que, como abstracción matemática de ese concepto, una señal se
representa mediante una función con un dominio y un rango específicos, x:D R. Por simplicidad,
a la variable que toma valores en el conjunto dominio le llamaremos “tiempo” y a la variable que
toma valores en el conjunto rango le llamaremos “amplitud”. La primera clasificación de señales
que vimos fue de acuerdo con la naturaleza continua o discreta del tiempo y la amplitud: Señales
análogas, señales cuantizadas, señales muestreadas o señales digitales. Veíamos, por último, que el
conjunto de señales representada como un tipo especial de funciones podría constituir un espacio
vectorial abstracto, por lo que podíamos aprovechar una visión geométrica de las señales en la que
cada señal es un vector.
Pero las señales, como cantidades físicas medibles, existen en un ambiente particular en el que se
generan, se propagan, se almacenan, se transforman, etc. Ese ambiente, que ejerce un proceso
transformador en una señal, se conoce como sistema. En efecto, probablemente se trata de un
conjunto de elementos que interactúan entre ellos para formar un todo, como una resistencia y un
condensador que forman un filtro, o un resorte y una masa que forman un oscilador, etc.
00.5
11.5
22.5
3
0
0.5
1
0
0.5
1
1.5
2
2.5
-0.5 0 0.50
0.5
1
1.5
-0.5 0 0.5 1 1.50
1
2
3
4
0 1 20
0.5
1
1.5
2
2.5
0 2 40
0.5
1
1.5
2
2.5
3
(a) Como función del tiempo (b) Como vector en un espacio euclidiano
Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 19
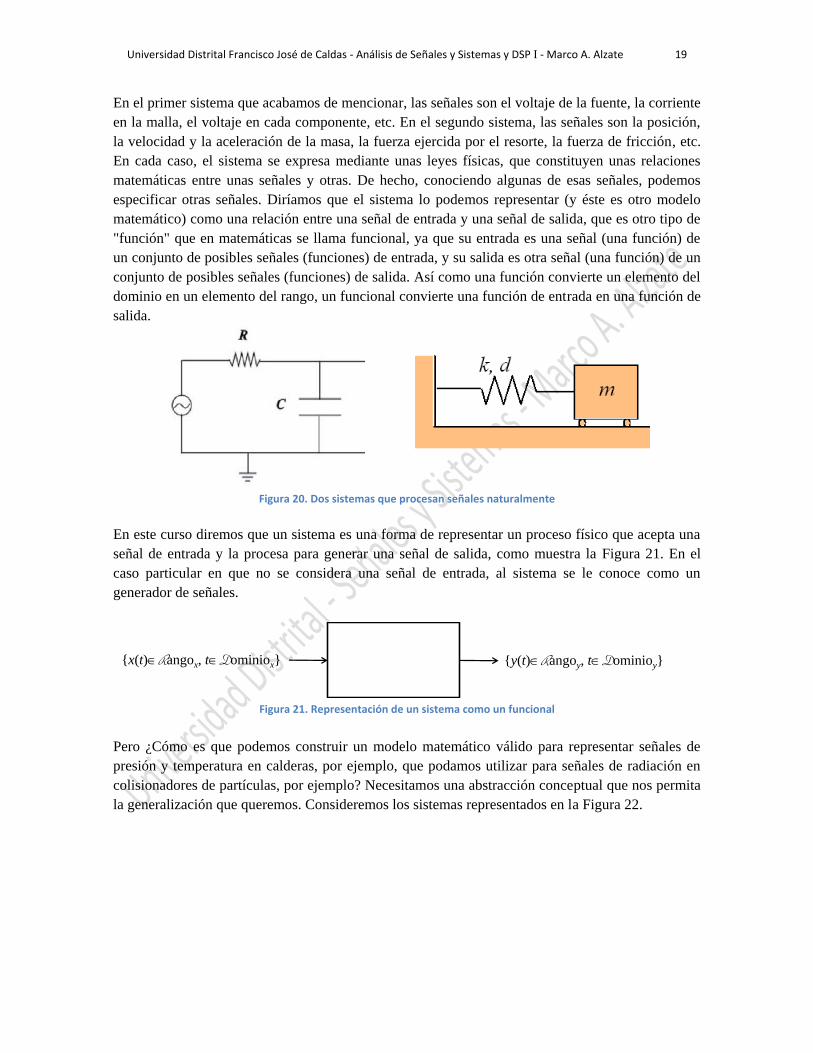
En el primer sistema que acabamos de mencionar, las señales son el voltaje de la fuente, la corriente
en la malla, el voltaje en cada componente, etc. En el segundo sistema, las señales son la posición,
la velocidad y la aceleración de la masa, la fuerza ejercida por el resorte, la fuerza de fricción, etc.
En cada caso, el sistema se expresa mediante unas leyes físicas, que constituyen unas relaciones
matemáticas entre unas señales y otras. De hecho, conociendo algunas de esas señales, podemos
especificar otras señales. Diríamos que el sistema lo podemos representar (y éste es otro modelo
matemático) como una relación entre una señal de entrada y una señal de salida, que es otro tipo de
"función" que en matemáticas se llama funcional, ya que su entrada es una señal (una función) de
un conjunto de posibles señales (funciones) de entrada, y su salida es otra señal (una función) de un
conjunto de posibles señales (funciones) de salida. Así como una función convierte un elemento del
dominio en un elemento del rango, un funcional convierte una función de entrada en una función de
salida.
Figura 20. Dos sistemas que procesan señales naturalmente
En este curso diremos que un sistema es una forma de representar un proceso físico que acepta una
señal de entrada y la procesa para generar una señal de salida, como muestra la Figura 21. En el
caso particular en que no se considera una señal de entrada, al sistema se le conoce como un
generador de señales.
Figura 21. Representación de un sistema como un funcional
Pero ¿Cómo es que podemos construir un modelo matemático válido para representar señales de
presión y temperatura en calderas, por ejemplo, que podamos utilizar para señales de radiación en
colisionadores de partículas, por ejemplo? Necesitamos una abstracción conceptual que nos permita
la generalización que queremos. Consideremos los sistemas representados en la Figura 22.
{x(t)Rangox, tDominiox} {y(t)Rangoy, tDominioy}

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 20
Figura 22. Dos sistemas diferentes que conducen a una misma forma de abstracción matemática
En cada caso conocemos leyes de la naturaleza, formuladas matemáticamente, que nos permiten
expresar unas señales en términos de otras. Por ejemplo, sabemos que el voltaje de entrada es la
suma del voltaje de salida más el voltaje en la resistencia, el cual es R veces la corriente, la cual es
C veces la variación del voltaje de salida. Igualmente, sabemos que la fuerza total sobre el carro es
igual a su masa por la aceleración (suponemos que el consumo de gasolina produce un cambio
despreciable en la masa del carro). Ese conocimiento de las leyes de la naturaleza nos lleva a
plantear las ecuaciones diferenciales mostrada en la Figura 22. Ahora consideremos el siguiente
modelo abstracto que puede representa cualquiera de los anteriores:
Figura 23. Abstracción matemática para los dos sistemas anteriores
En efecto, si usamos {vi(t)}t en vez de {x(t)}t, {vo(t)}t en vez de {y(t)}t y RC en vez de , el modelo
abstracto podría ser una representación del circuito RC. Pero si usamos {F(t)/}t en vez de {x(t)}t,
{v(t)}t en vez de {y(t)}t y M/ en vez de , el modelo abstracto podría ser una representación del
sistema mecánico. En lo que a este curso respecta, entonces, {x(t)}t será simplemente una señal de
entrada a un sistema que la procesa para obtener una señal de salida {y(t)}t, independientemente de
que se trate de voltajes, corrientes, fuerzas o velocidades. Nuevamente, estamos hablando de
modelos matemáticos (funciones para las señales y funcionales para los sistemas), como un
concepto abstracto que podría representar cualquier sistema físico apropiado.
Estos "modelos comunes" para diferentes sistemas de la realidad, expresados mediante ecuaciones
diferenciales lineales con coeficientes constantes, motivaron el desarrollo del computador análogo
basado en amplificadores operacionales en la década de 1980. Por ejemplo, haciendo las
escalizaciones adecuadas, el circuito de la Figura 24 podría simular la carga de un condensador
(Figura 22a), la velocidad de un partícula (Figura 22b), o cualquier otro sistema continuo lineal de
primer orden (Figura 23):
i(t)vi(t)
vo(t)
+
-
+
-
F(t)
v(t)
v(t)
M
0
0
0
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
i R
i
i o
v t v t v t
v t v t R i t
dv t v t RC v t
dt
( ) ( ) ( )
1( ) ( ) ( )
dF t v t M v t
dt
M dF t v t v t
dt
1/
x(t) y(t)+
_
1
( ) ( ) ( )
( ) ( ) ( )
dx t y t y t
dt
dx t y t y t
dt

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 21
Figura 24. Simulación de los sistemas de la Figura 22 y la Figura 23 mediante un computador análogo.
El computador análogo de la Figura 24 tiene un primer amplificador operacional que calcula en
cada instante la diferencia (x(t) – y(t))/. Esta relación define la derivada de señal de salida en ese
instante, de manera que un segundo amplificador operacional se encarga de integrar el resultado
para obtener la señal de salida especificada.
La clasificación de señales según su dominio sea continuo o discreto y según su rango sea continuo
o discreto también se aplicará a los sistemas según el tipo de señales de entrada y salida,
conduciendo a 16 posibles tipos de sistemas. Si consideramos sólo señales con amplitudes
continuas, el número de tipos de sistemas se reduce a cuatro, según las señales de entrada y salida
sean de tiempo continuo o de tiempo discreto. El primero de los siguientes dos sistemas (como los
de la Figura 20, la Figura 22, la Figura 23 y la Figura 24) es un sistema en tiempo continuo,
mientras el segundo es un sistema en tiempo discreto:
Figura 25. Sistemas en tiempo continuo y en tiempo discreto
Si un sistema tiene entradas en tiempo continuo y salidas en tiempo discreto, dentro del sistema
existirá al menos un “muestreador”. Si un sistema tiene entradas en tiempo discreto y salidas en
tiempo continuo, dentro del sistema existirá al menos un “interpolador”. En este curso, estos dos
tipos de sistemas se estudiarán sólo en el contexto de la conversión análogo/digital (DAC) y
digital/análogo (ADC) –véase la clase ¡Error! No se encuentra el origen de la referencia.–.
Como un ejemplo inicial de sistema discreto, veamos como simular en un computador digital el
sistema lineal de primer orden que representa al circuito RC o al automóvil de la Figura 22:
( ) ( ) ( )d
x t y t y tdt
–
+
–
+R
R
R
R
R
C=1/R
x(t) y(t)
( ) ( ) ( )d
x t y t y tdt
{x(t)ℝ, tℝ} {y(t)ℝ, tℝ}
{x[n]ℝ, nℤ} {y[n]ℝ, nℤ}

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 22
Si consideramos un incremento de tiempo t en vez del diferencial dt, y consideramos sólo
instantes de tiempo múltiplos de t, podríamos aproximar la derivada de la ecuación anterior en el
instante nt como la pendiente entre los instantes consecutivos (n-1)t y nt para obtener
( ) (( 1) )( ) ( )
y n t y n tx n t y n t
t
que podemos interpretar como un sistema en tiempo discreto:
[ ] [ ] 1 [ 1], donde x n y n y nt
Dicho sistema se representa en la Figura 26.
Figura 26. Aproximación en tiempo discreto a los sistemas de la Figura 22 y la Figura 23
Este sistema genérico en tiempo discreto es fácil de simular ya no con un computador análogo
(Figura 24) sino con un computador digital (Figura 27)
Figura 27. Simulación de los sistemas de la Figura 22 y la Figura 23 mediante un computador digital
El computador digital está compuesto por un puerto de entrada, un puerto de salida, una memoria y
una CPU que incluye do s registros internos, RA y RB. El sistema a simular se implementa ahora en
el programa almacenado en la memoria. La Figura 27 muestra un código genérico en un hipotético
lenguaje ensamblador para simular el sistema de la Figura 26. La primera instrucción inicializa en
cero el registro RA que, en el instante n, representa la salida y[n]. Luego se entra a un lazo infinito
en el que se espera una interrupción que ocurre cada t segundos (instrucción 2), se lee la entrada
x[n] y[n]
Retardoy[n-1]
1
1
Puerto A
(Entrada)
Puerto B
(Salida)Memoria
CPU
Buses
t
INT
x y
1 LOAD RA,#0 % Inicia el registro A en cero (y[-1]=0)
2 Loop:WAIT_INT % Espera la siguiente interrupción
3 INPUT RB,(PuertoA) % Lee el dato de entrada
4 MULT RA,#beta % y[n-1]
5 ADD RA,RB % x[n] + y[n-1]
6 DIV RA,#(1+beta) % y[n] = (x[n] + y[n-1])/(1+)7 OUTPUT (PuertoB),RA % Escribe el dato de salida
8 JUMP Loop % Repite indefinidamente
RA
RB

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 23
x[n] en el registro RB (instrucción 3) y, en las instrucciones 4, 5 y 6, se realiza el cálculo RA
(RB + RA)/(1+), que corresponde a la salida actual y[n]. Este valor se saca a través del puerto de
salida PuertoB antes de esperar la siguiente interrupción (instrucciones 7 y 8).
Al observar la Figura 23 y la Figura 26, notamos que la representación de sistemas en bloques que
efectúan una transformación de una señal de entrada para producir una señal de salida ofrece una
poderosa abstracción para estudiar y diseñar sistemas físicos. Como un ejemplo de sistemas
ampliamente estudiados, consideremos un sistema de comunicaciones en el que una fuente de
información genera un mensaje que debe ser representado en forma de señales físicas para poder
transmitirlo a través de un canal, donde la señal transmitida puede sufrir distorsiones, interferencias
y ruido. La intención es recuperar el mensaje original de la manera más oportuna y fidedigna
posible. Tanto el sistema entero como el transmisor, el canal y el receptor corresponden al modelo
matemático que hemos estado considerando: Entra una señal de un conjunto de posibles señales de
entrada, la cual se transforma en una señal de un conjunto de posibles señales de salida. Como las
señales correspondientes se pueden modelar como funciones del tiempo, cada subsistema resulta ser
un funcional (Ver Figura 28).
Figura 28. Modelo matemático (abstracción conceptual) de un sistema de comunicaciones
Otro ejemplo es un sistema de control realimentado como el que se muestra en la Figura 29, en el
que se desea que un proceso particular (o “planta”) produzca una respuesta satisfactoria de manera
robusta, esto es, a pesar de cambios en el ambiente. Para esto, se considera que la planta obedece a
señales de control para producir la señal de salida, esto es, el proceso a controlar es un sistema de
procesamiento de señales. Entonces es posible tomar la señal de salida para producir una señal
realimentada que se compara con una señal de referencia. Si son iguales, la planta está operando
satisfactoriamente. Si no, un sistema adicional usará la señal de diferencia como entrada para
producir como salida los cambios necesarios en la señal de control.
Figura 29. Modelo matemático (abstracción conceptual) de un sistema de control
Es importante notar que cuando decidimos utilizar modelos matemáticos para representar de manera
simplificada alguna realidad compleja, estamos construyendo una idealización que será válida sólo
Fuen-te
Trans-ductor
Trans-misor
Canal ReceptorTrans-ductor
Desti-no
Ruido, interferencia y distorsión
MensajeSeñal de entrada
Señal transmitida
Señal recibida
Señal de salida Mensaje
Elementode control
Proceso a controlar
Lazo de realimentación
Señal de referencia
Compa-ración
Señal de diferencia
Señal de control Señal de
salida
Señal re-alimentada

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 24
en la medida en que el modelo capture los aspectos más relevantes de la realidad, y en la medida en
que la realidad se ajuste con suficiente precisión a las suposiciones del modelo. Esto implica, por
ejemplo, que los valores de las señales se mantengan dentro de las escalas de validez del modelo, o
que los parámetros que describen a los componentes se encuentren suficientemente cerca de los
valores usados en el modelo. En general, una característica fundamental del ingeniero es su
capacidad de determinar el alcance de la validez de los modelos que utiliza, asegurándose que en el
proceso de análisis o diseño que adelanta siempre se cumplan las condiciones y suposiciones en las
que se basó el desarrollo de su modelo matemático.
Si el modelo matemático es apropiado, se podrán analizar y diseñar sistemas que permitan capturar
señales para extraer de ellas información (o construir señales para imprimir en ellas información).
Los procesos pueden incluir mejorar las señales (eliminar de ellas ruidos y distorsiones), estimar
una señal a partir de otra, predecir valores futuros de la señal a partir de su valor actual y valores
anteriores, reconocer características del sistema que originó la señal, comprimir la señal eliminando
la información redundante en ella, etc.
Por último, notemos que cuando representamos las señales como vectores en un espacio vectorial,
los sistemas se vuelven “transfomaciones” que asocian cada vector de un espacio vectorial original
con otro vector del mismo espacio o de otro espacio vectorial diferente. Por ejemplo, consideremos
el sistema de la Figura 26 que, al iterar, corresponde a la forma funcional
0
1[ ] [ ] ,
1 1k
k
y n x n k n
y supongamos que x[n]=0 para todo nℤ, excepto para n=0,1, y 2. Entonces la expresión anterior
nos muestra que y[n]=0 para todo nℤ, excepto para n=0,1,2,3 y 4, de manera que el sistema entero
se puede representar como una transformación lineal del espacio Euclidiano ℝ3 al espacio
Euclidiano ℝ5:
2
2
3 2
3 2
4 3 2
4 3 2
5 4 3
10 0
1
10[0]
(1 ) 1[0][1]
1[1][2]
(1 ) (1 ) 1[2][3]
[4](1 ) (1 ) (1 )
(1 ) (1 ) (1 )
y
xy
xy
xy
y
Al considerar más muestras de las señales de entrada y salida, las dimensiones de los espacios
vecoriales respectivos aumentan, pero el concepto de que el vector de salida es una transformación
lineal representada mediante el producto de una matriz por un vector de entrada permanece,
y T x . Como mencionamos en la sección 1.2, aún con señales de duración infinita (vectores de
infinitas dimensiones) se puede usar esta abstracción, en cuyo caso los espacios vectoriales
correspondientes no serán espacios Euclidianos sino espacios de Hilbert, ya sea que se trate de
señales en tiempo continuo o en tiempo discreto.

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 25
Como hemos mencionado, esta visión geométrica tendrá grandes ventajas conceptuales, prácticas e
intuitivas por la asociación con la geometría tridimensional en la que vivimos inmersos. Por
ejemplo, podemos hacer una cambio de coordenadas tal que la matriz que representa la
transformación lineal, y T x , se convierta en una matriz diagonal, Y D X , con lo cual se
facilita enormemente el cálculo de la transformación. Uno de dichos cambios de coordenadas se
conoce como Transformada de Fourier, por ejemplo. ¡Sí! ¡La transformada de Fourier es
simplemente un cambio de coordenadas como los que hacíamos en nuestro curso de álgebra lineal
de primer semestre! Más adelante veremos estos aspectos de la visión geométrica de las señales con
suficiente detalle para convertirlos en una poderosa abstracción conceptual y una poderosa
herramienta computacional.

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 26
Primera tarea
En esta tarea compararemos la validez de la aproximación entre los dos sistemas en tiempo
continuo y en tiempo discreto que vimos en esta primera clase.
[ ] [ ] 1 [ 1], donde d d dx n y n y nt
En esta aproximación, si xd[n] es la n-ésima muestra de x(t), xd[n]=x(nt), esperaríamos que yd[n] se
pareciera a la n-ésima muestra de y(t), yd[n]y(nt). Para verificar la validez de esta esperanza,
suponga que queremos representar el circuito RC con = RC = 10 ms y un incremento discreto de
tiempo t = 1 ms, de manera que el parámetro del sistema en tiempo discreto es = 10. Suponga
que la señal de entrada al sistema continuo es un paso de 1 V de amplitud y 30 ms de duración,
como se muestra a continuación:
(a) Encuentre analíticamente la salida del sistema en tiempo continuo, y(t), suponiendo que y(0-) =
0, y grafíquela para t entre 0 y 80 ms.
(b) Obtenga xd[n] tomando muestras de x(t) cada t = 1 ms, xd[n] = x(n/1000), calcule la salida del
sistema en tiempo discreto, yd[n], suponiendo que yd[-1]=0, y grafíquela para n entre 0 y 80.
Note que no se trata de muestrear la señal análoga de salida, como hicimos con xd[n] =
x(n/1000), sino de calcular yd[n] a partir de xd[n] evaluando el sistema en tiempo discreto.
(c) Calcule el error cuadrado promedio (MSE –Mean Square Error) en el rango [0, 0.08]
80
2
0
1( /1000) [ ]
81d
n
MSE y n y n
.
(d) Repita los puntos (b) y (c) con t = 0.2 ms (xd[n] = x(n/5000), = 50, n entre 0 y 400,
400
2
0
1( / 5000) [ ]
401d
n
MSE y n y n
.
Escriba un breve párrafo de conclusiones.
1/
x(t) y(t)+
_
1
( ) ( ) ( )
( ) ( ) ( )
dx t y t y t
dt
dx t y t y t
dt
xd[n] yd [n]
Retardoyd [n-1]
1
1
t
x(t)
0 30 ms
1 V
0 V

Universidad Distrital Francisco José de Caldas - Análisis de Señales y Sistemas y DSP I - Marco A. Alzate 27





























