Embed Size (px)
Citation preview
1
Learning Language from its Perceptual Context
Ray MooneyDepartment of Computer Sciences
University of Texas at Austin
Joint work with
David Chen
Joohyun Kim
Rohit Kate

Current State of Natural Language Learning
• Most current state-of-the-art NLP systems are constructed by training on large supervised corpora.– Syntactic Parsing: Penn Treebank– Word Sense Disambiguation: SenseEval– Semantic Role Labeling: Propbank– Machine Translation: Hansards corpus
• Constructing such annotated corpora is difficult, expensive, and time consuming.
2
3
Semantic Parsing
• A semantic parser maps a natural-language (NL) sentence to a complete, detailed formal semantic representation: logical form or meaning representation (MR).
• For many applications, the desired output is computer language that is immediately executable by another program.
4
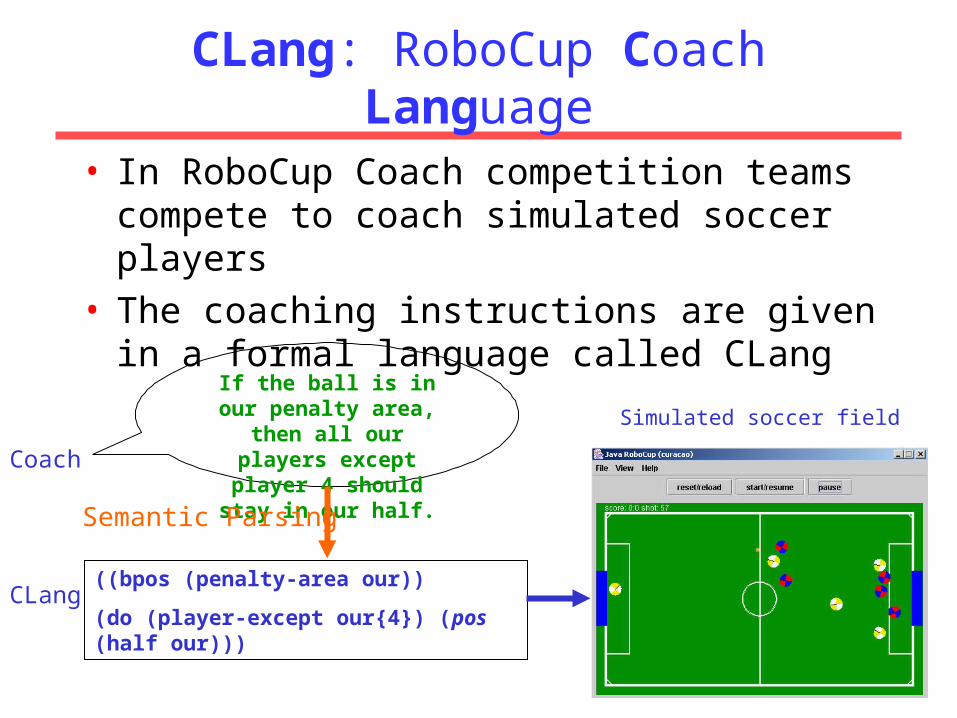
CLang: RoboCup Coach Language
• In RoboCup Coach competition teams compete to coach simulated soccer players
• The coaching instructions are given in a formal language called CLang
Simulated soccer field
Coach
If the ball is in our penalty area, then all our players except player 4 should stay in our half.
CLang((bpos (penalty-area our))
(do (player-except our{4}) (pos (half our)))
Semantic Parsing

5
Learning Semantic Parsers
• Manually programming robust semantic parsers is difficult due to the complexity of the task.
• Semantic parsers can be learned automatically from sentences paired with their logical form.
NLMR Training Exs
Semantic-Parser Learner
Natural Language
Meaning Rep
SemanticParser

6
Our Semantic-Parser Learners
• CHILL+WOLFIE (Zelle & Mooney, 1996; Thompson & Mooney, 1999) – Separates parser-learning and semantic-lexicon learning.– Learns a deterministic parser using ILP techniques.
• COCKTAIL (Tang & Mooney, 2001)– Improved ILP algorithm for CHILL.
• SILT (Kate, Wong & Mooney, 2005) – Learns symbolic transformation rules for mapping directly from NL to MR.
• SCISSOR (Ge & Mooney, 2005) – Integrates semantic interpretation into Collins’ statistical syntactic parser.
• WASP (Wong & Mooney, 2006; 2007)– Uses syntax-based statistical machine translation methods.
• KRISP (Kate & Mooney, 2006)– Uses a series of SVM classifiers employing a string-kernel to iteratively build
semantic representations.
• SynSem (Ge & Mooney, 2009)– Uses existing statistical syntactic parser & word alignment.
7
Learning Language from Perceptual Context
• Children do not learn language from annotated corpora.• Neither do they learn language from just reading the
newspaper, surfing the web, or listening to the radio.– Unsupervised language learning
– DARPA Learning by Reading Program
• The natural way to learn language is to perceive language in the context of its use in the physical and social world.
• This requires inferring the meaning of utterances from their perceptual context.

8
Language Grounding
• The meanings of many words are grounded in our perception of the physical world: red, ball, cup, run, hit, fall, etc.– Symbol Grounding: Harnad (1990)
• Even many abstract words and meanings are metaphorical abstractions of terms grounded in the physical world: up, down, over, in, etc.– Lakoff and Johnson’s Metaphors We Live By
• Its difficult to put my ideas into words.
• Most NLP work represents meaning without any connection to perception; circularly defining the meanings of words in terms of other words or meaningless symbols with no firm foundation.
Sample Circular Definitionsfrom WordNet
• sleep (v)– “be asleep”
• asleep (adj)– “in a state of sleep”
9

10
10
???
“Mary is on the phone”
11
11
“Mary is on the phone”
???
12
12
“Mary is on the phone”???

13
13
Ironing(Mommy, Shirt)
“Mary is on the phone”???
14
14
Ironing(Mommy, Shirt)
Working(Sister, Computer)
“Mary is on the phone”???
15
15
Ironing(Mommy, Shirt)
Working(Sister, Computer)
Carrying(Daddy, Bag)
“Mary is on the phone”???
16
16
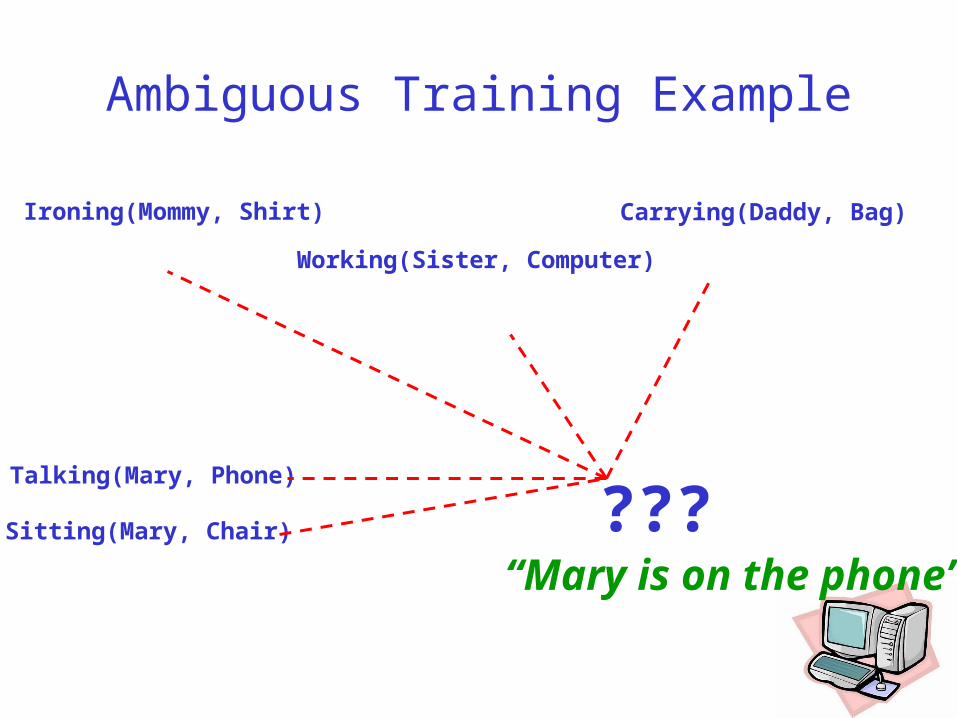
Ironing(Mommy, Shirt)
Working(Sister, Computer)
Carrying(Daddy, Bag)
Talking(Mary, Phone)
Sitting(Mary, Chair)
“Mary is on the phone”
Ambiguous Training Example
???
17
17
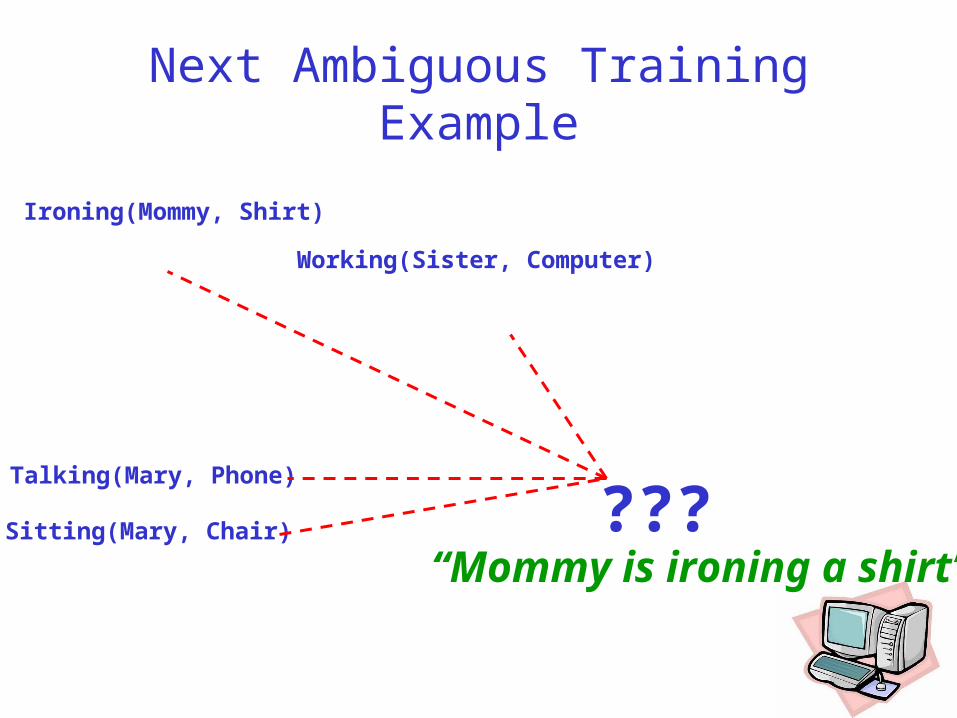
Ironing(Mommy, Shirt)
Working(Sister, Computer)
Talking(Mary, Phone)
Sitting(Mary, Chair)
“Mommy is ironing a shirt”
Next Ambiguous Training Example
???
Ambiguous Supervision for Learning Semantic Parsers
• Our model of ambiguous supervision corresponds to the type of data that will be gathered from a temporal sequence of perceptual contexts with occasional language commentary.
• We assume each sentence has exactly one meaning in its perceptual context.– Recently extended to handle sentences with no
meaning in its perceptual context.
• Each meaning is associated with at most one sentence.
19
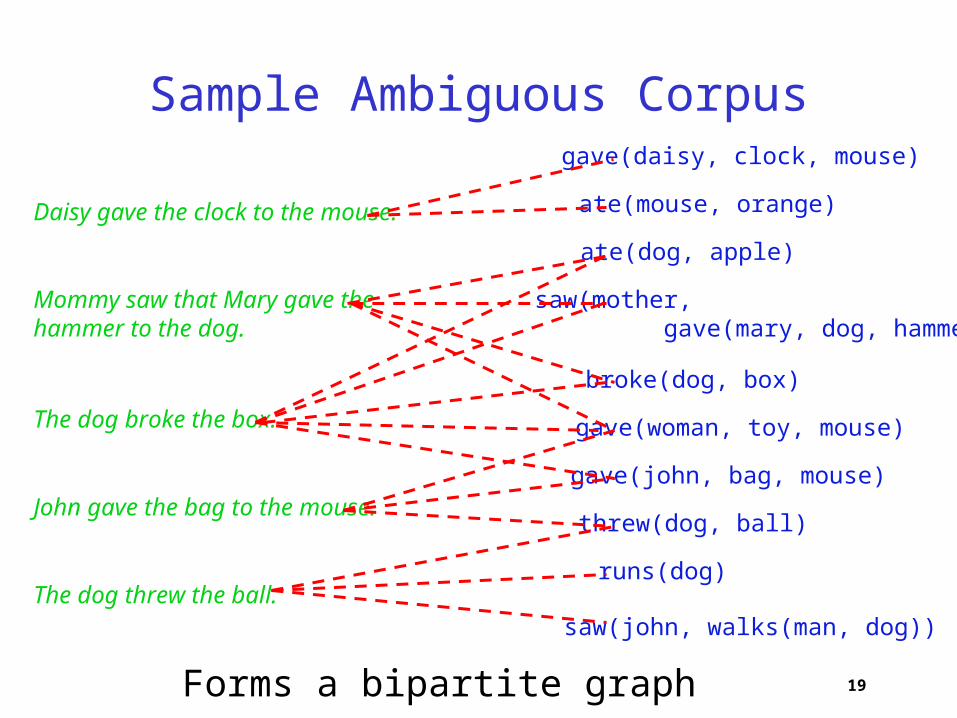
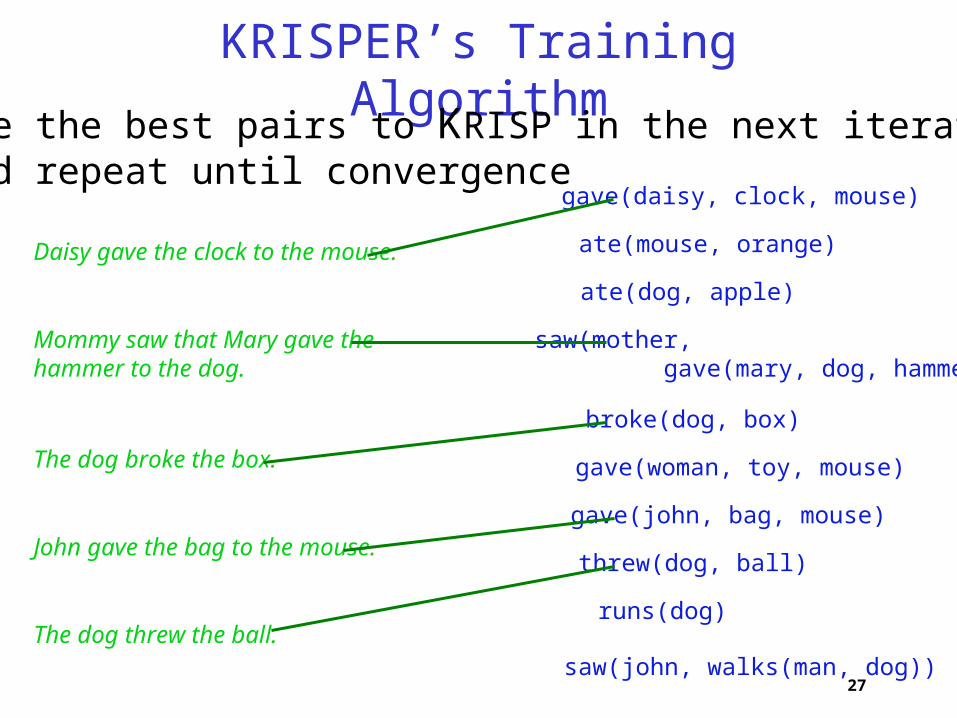
Sample Ambiguous Corpus
Daisy gave the clock to the mouse.
Mommy saw that Mary gave the hammer to the dog.
The dog broke the box.
John gave the bag to the mouse.
The dog threw the ball.
ate(mouse, orange)
gave(daisy, clock, mouse)
ate(dog, apple)
saw(mother, gave(mary, dog, hammer))
broke(dog, box)
gave(woman, toy, mouse)
gave(john, bag, mouse)
threw(dog, ball)
runs(dog)
saw(john, walks(man, dog))
Forms a bipartite graph
KRISPER (Kate & Mooney, 2007): KRISP with EM-like Retraining
• Extension of KRISP that learns from ambiguous supervision.
• Uses an iterative EM-like self-training method to gradually converge on a correct meaning for each sentence.
21
saw(john, walks(man, dog))
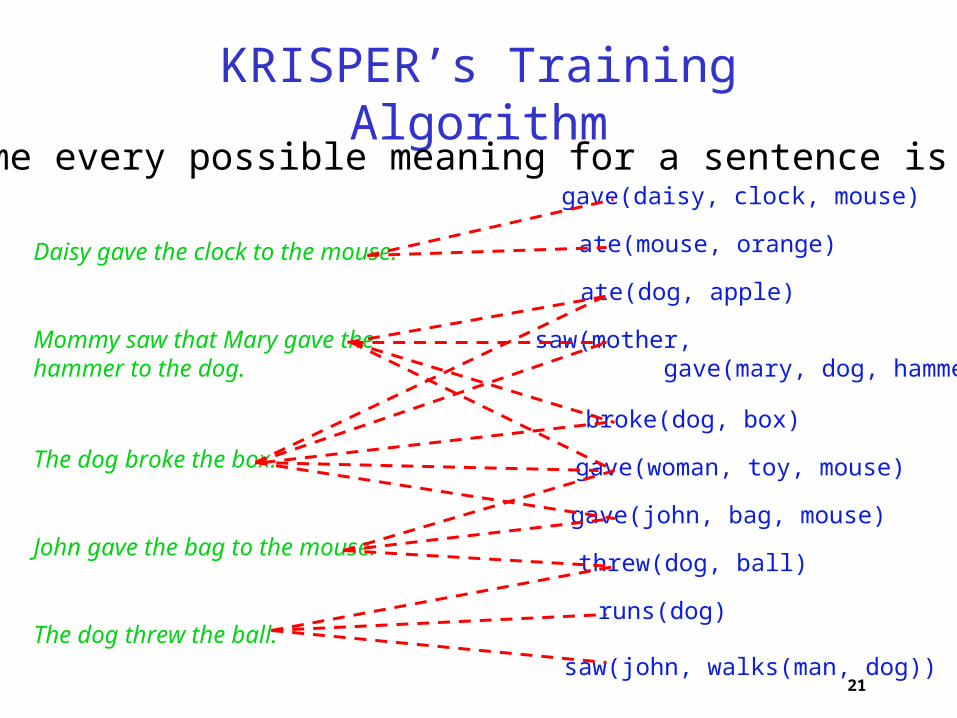
KRISPER’s Training Algorithm
Daisy gave the clock to the mouse.
Mommy saw that Mary gave the hammer to the dog.
The dog broke the box.
John gave the bag to the mouse.
The dog threw the ball.
ate(mouse, orange)
gave(daisy, clock, mouse)
ate(dog, apple)
saw(mother, gave(mary, dog, hammer))
broke(dog, box)
gave(woman, toy, mouse)
gave(john, bag, mouse)
threw(dog, ball)
runs(dog)
1. Assume every possible meaning for a sentence is correct

22
saw(john, walks(man, dog))
KRISPER’s Training Algorithm
Daisy gave the clock to the mouse.
Mommy saw that Mary gave the hammer to the dog.
The dog broke the box.
John gave the bag to the mouse.
The dog threw the ball.
ate(mouse, orange)
gave(daisy, clock, mouse)
ate(dog, apple)
saw(mother, gave(mary, dog, hammer))
broke(dog, box)
gave(woman, toy, mouse)
gave(john, bag, mouse)
threw(dog, ball)
runs(dog)
1. Assume every possible meaning for a sentence is correct
23
saw(john, walks(man, dog))
KRISPER’s Training Algorithm
Daisy gave the clock to the mouse.
Mommy saw that Mary gave the hammer to the dog.
The dog broke the box.
John gave the bag to the mouse.
The dog threw the ball.
ate(mouse, orange)
gave(daisy, clock, mouse)
ate(dog, apple)
saw(mother, gave(mary, dog, hammer))
broke(dog, box)
gave(woman, toy, mouse)
gave(john, bag, mouse)
threw(dog, ball)
runs(dog)
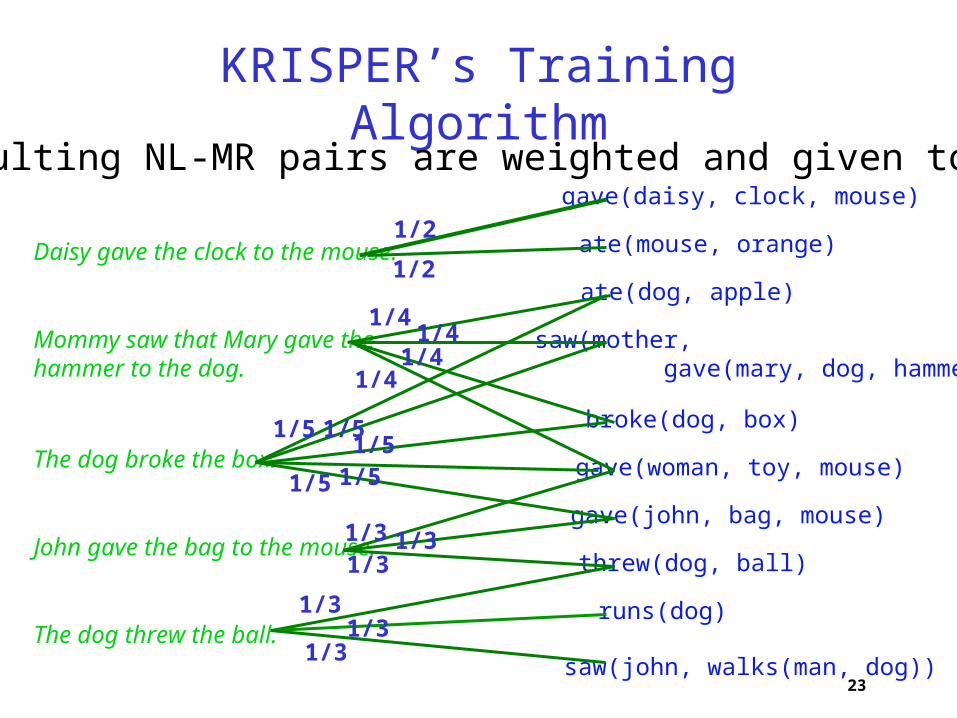
2. Resulting NL-MR pairs are weighted and given to KRISP
1/2
1/2
1/41/4
1/41/4
1/5 1/51/5
1/51/5
1/3 1/31/3
1/31/3
1/3

24
saw(john, walks(man, dog))
KRISPER’s Training Algorithm
Daisy gave the clock to the mouse.
Mommy saw that Mary gave the hammer to the dog.
The dog broke the box.
John gave the bag to the mouse.
The dog threw the ball.
ate(mouse, orange)
gave(daisy, clock, mouse)
ate(dog, apple)
saw(mother, gave(mary, dog, hammer))
broke(dog, box)
gave(woman, toy, mouse)
gave(john, bag, mouse)
threw(dog, ball)
runs(dog)
3. Estimate the confidence of each NL-MR pair using the resulting trained parser
0.92
0.11
0.320.88
0.220.24
0.180.85
0.24 0.890.33
0.970.81
0.34
0.71
0.950.14

25
saw(john, walks(man, dog))
KRISPER’s Training Algorithm
Daisy gave the clock to the mouse.
Mommy saw that Mary gave the hammer to the dog.
The dog broke the box.
John gave the bag to the mouse.
The dog threw the ball.
ate(mouse, orange)
gave(daisy, clock, mouse)
ate(dog, apple)
saw(mother, gave(mary, dog, hammer))
broke(dog, box)
gave(woman, toy, mouse)
gave(john, bag, mouse)
threw(dog, ball)
runs(dog)
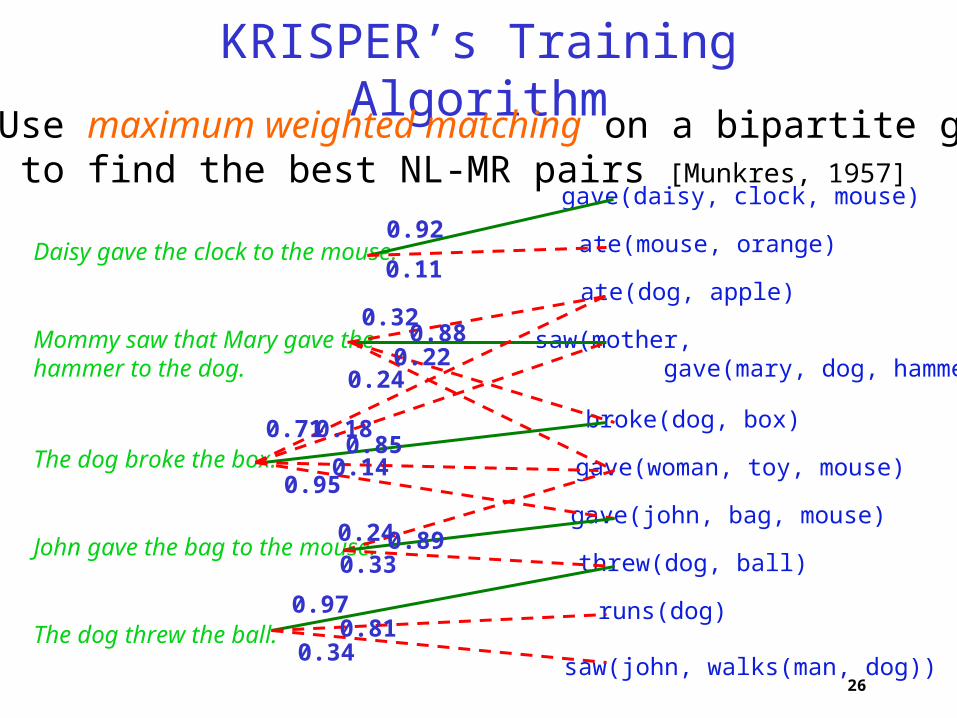
4. Use maximum weighted matching on a bipartite graph to find the best NL-MR pairs [Munkres, 1957]
0.92
0.11
0.320.88
0.220.24
0.180.85
0.24 0.890.33
0.970.81
0.34
0.71
0.950.14
26
saw(john, walks(man, dog))
KRISPER’s Training Algorithm
Daisy gave the clock to the mouse.
Mommy saw that Mary gave the hammer to the dog.
The dog broke the box.
John gave the bag to the mouse.
The dog threw the ball.
ate(mouse, orange)
gave(daisy, clock, mouse)
ate(dog, apple)
saw(mother, gave(mary, dog, hammer))
broke(dog, box)
gave(woman, toy, mouse)
gave(john, bag, mouse)
threw(dog, ball)
runs(dog)
4. Use maximum weighted matching on a bipartite graph to find the best NL-MR pairs [Munkres, 1957]
0.92
0.11
0.320.88
0.220.24
0.180.85
0.24 0.890.33
0.970.81
0.34
0.71
0.950.14
27
saw(john, walks(man, dog))
KRISPER’s Training Algorithm
Daisy gave the clock to the mouse.
Mommy saw that Mary gave the hammer to the dog.
The dog broke the box.
John gave the bag to the mouse.
The dog threw the ball.
ate(mouse, orange)
gave(daisy, clock, mouse)
ate(dog, apple)
saw(mother, gave(mary, dog, hammer))
broke(dog, box)
gave(woman, toy, mouse)
gave(john, bag, mouse)
threw(dog, ball)
runs(dog)
5. Give the best pairs to KRISP in the next iteration, and repeat until convergence
28
New Challenge:Learning to Be a Sportscaster
• Goal: Learn from realistic data of natural language used in a representative context while avoiding difficult issues in computer perception (i.e. speech and vision).
• Solution: Learn from textually annotated traces of activity in a simulated environment.
• Example: Traces of games in the Robocup simulator paired with textual sportscaster commentary.
Tactical Generation
• Learn how to generate NL from MR
• Example:Pass(Pink2, Pink3) “Pink2 kicks the ball to Pink3”
•29

WASP / WASP-1
(Wong & Mooney, 2006, 2007)
• Supervised system for learning both a semantic parser and a tactical language generator.
• Uses probabilistic version of a synchronous context-free grammar (SCFG) that generates two corresponding strings (NL & MR) simultaneously.
•30
31
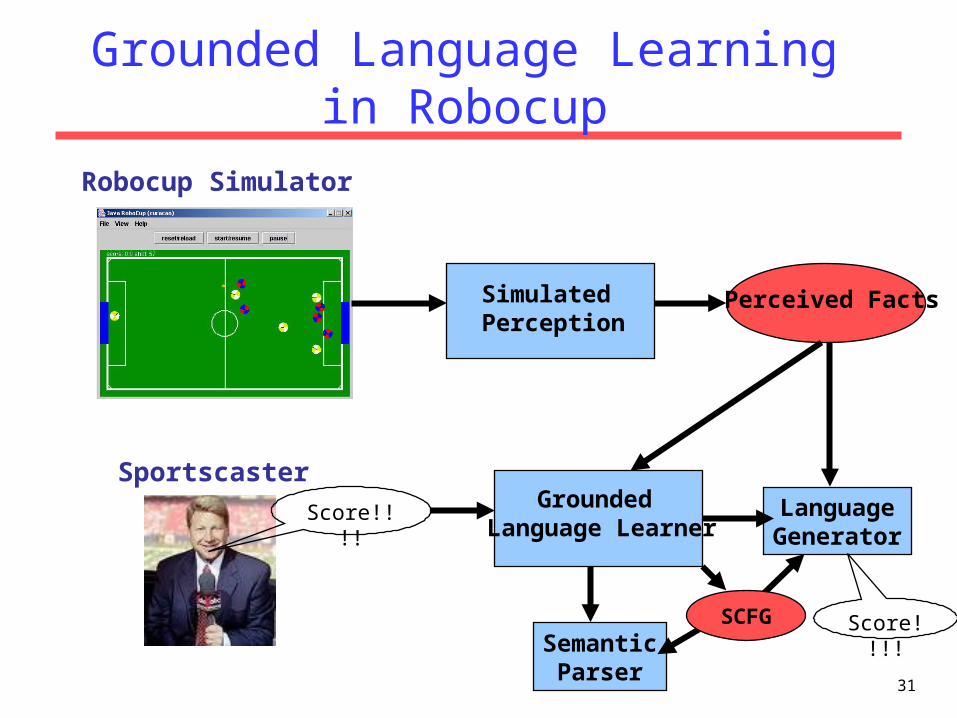
Grounded Language Learning in Robocup
Robocup Simulator
Sportscaster
Simulated Perception
Perceived Facts
Score!!!!Grounded
Language LearnerLanguageGenerator
SemanticParser
SCFG Score!!!!

Sample Human Sportscast in Korean
32
33
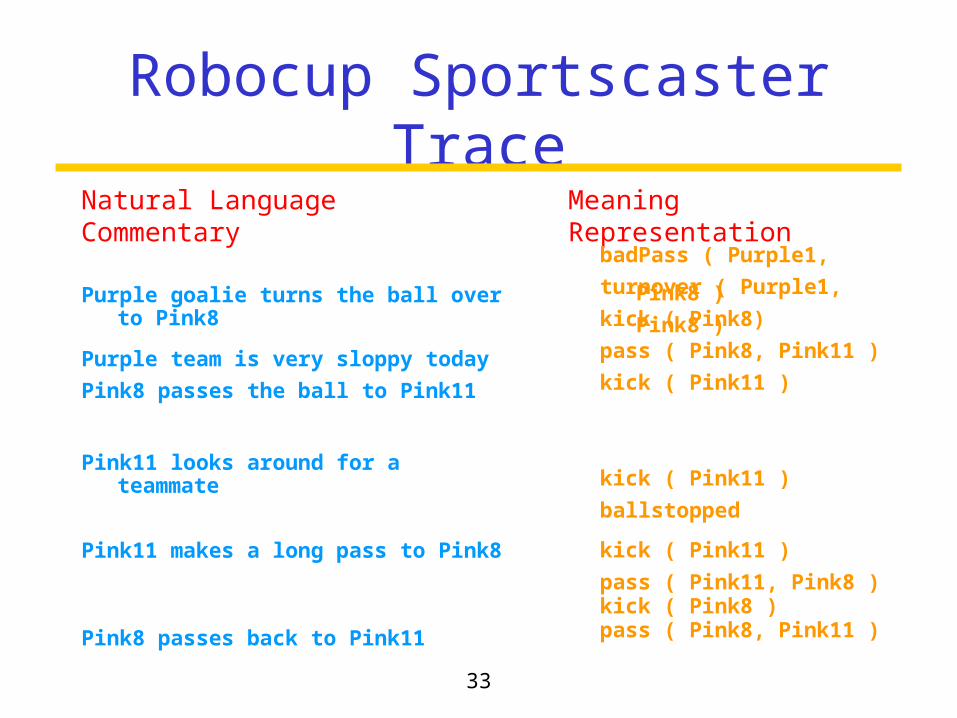
Robocup Sportscaster TraceNatural Language Commentary Meaning Representation
Purple goalie turns the ball over to Pink8
badPass ( Purple1, Pink8 )
Pink11 looks around for a teammate
Pink8 passes the ball to Pink11
Purple team is very sloppy today
Pink11 makes a long pass to Pink8
Pink8 passes back to Pink11
turnover ( Purple1, Pink8 )
pass ( Pink11, Pink8 )
pass ( Pink8, Pink11 )
ballstopped
pass ( Pink8, Pink11 )
kick ( Pink11 )
kick ( Pink8)
kick ( Pink11 )
kick ( Pink11 )
kick ( Pink8 )
34
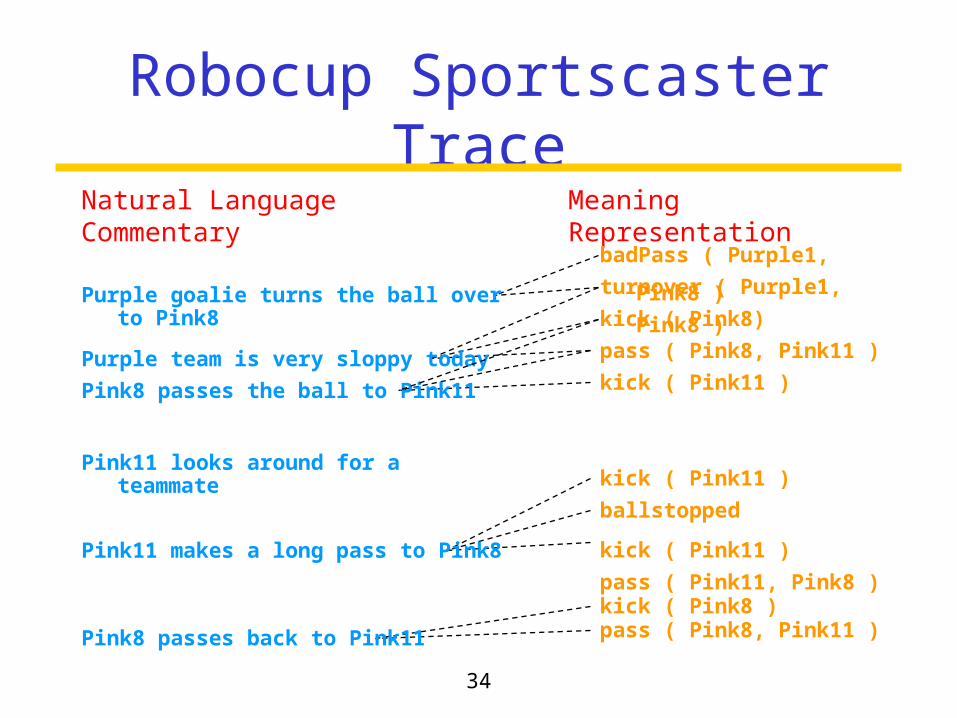
Robocup Sportscaster TraceNatural Language Commentary Meaning Representation
Purple goalie turns the ball over to Pink8
badPass ( Purple1, Pink8 )
Pink11 looks around for a teammate
Pink8 passes the ball to Pink11
Purple team is very sloppy today
Pink11 makes a long pass to Pink8
Pink8 passes back to Pink11
turnover ( Purple1, Pink8 )
pass ( Pink11, Pink8 )
pass ( Pink8, Pink11 )
ballstopped
pass ( Pink8, Pink11 )
kick ( Pink11 )
kick ( Pink8)
kick ( Pink11 )
kick ( Pink11 )
kick ( Pink8 )

35
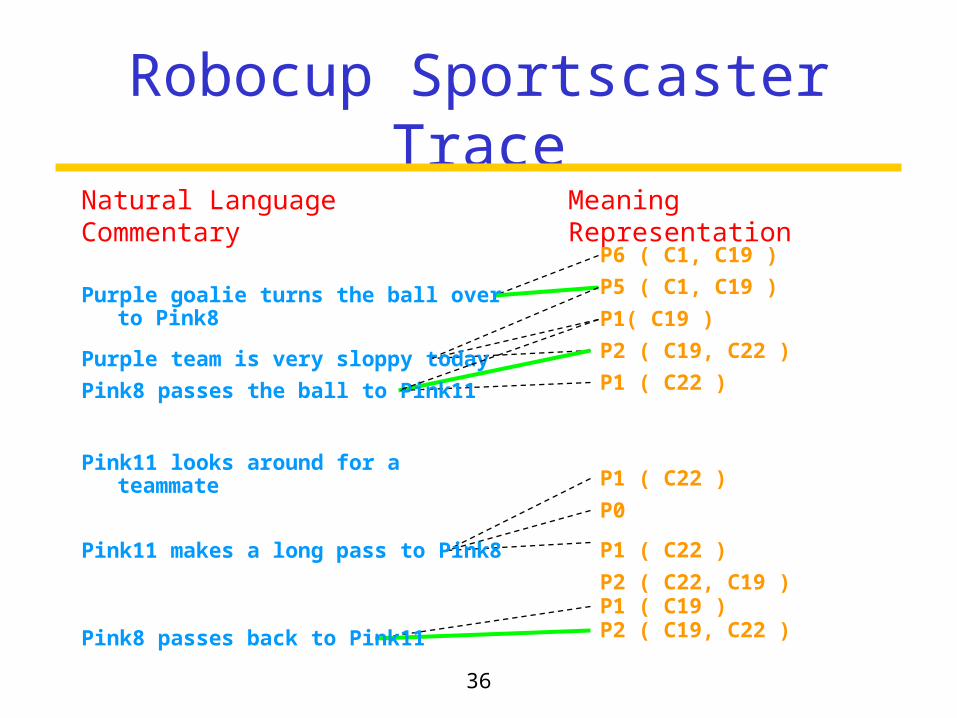
Robocup Sportscaster TraceNatural Language Commentary Meaning Representation
Purple goalie turns the ball over to Pink8
badPass ( Purple1, Pink8 )
Pink11 looks around for a teammate
Pink8 passes the ball to Pink11
Purple team is very sloppy today
Pink11 makes a long pass to Pink8
Pink8 passes back to Pink11
turnover ( Purple1, Pink8 )
pass ( Pink11, Pink8 )
pass ( Pink8, Pink11 )
ballstopped
pass ( Pink8, Pink11 )
kick ( Pink11 )
kick ( Pink8)
kick ( Pink11 )
kick ( Pink11 )
kick ( Pink8 )
36
Robocup Sportscaster TraceNatural Language Commentary Meaning Representation
Purple goalie turns the ball over to Pink8
P6 ( C1, C19 )
Pink11 looks around for a teammate
Pink8 passes the ball to Pink11
Purple team is very sloppy today
Pink11 makes a long pass to Pink8
Pink8 passes back to Pink11
P5 ( C1, C19 )
P2 ( C22, C19 )
P2 ( C19, C22 )
P0
P2 ( C19, C22 )
P1 ( C22 )
P1( C19 )
P1 ( C22 )
P1 ( C22 )
P1 ( C19 )
37
Strategic Generation
• Generation requires not only knowing how to say something (tactical generation) but also what to say (strategic generation).
• For automated sportscasting, one must be able to effectively choose which events to describe.
37
38
Example of Strategic Generation
pass ( purple7 , purple6 )
ballstopped
kick ( purple6 )
pass ( purple6 , purple2 )
ballstopped
kick ( purple2 )
pass ( purple2 , purple3 )
kick ( purple3 )
badPass ( purple3 , pink9 )
turnover ( purple3 , pink9 )
38

39
Example of Strategic Generation
pass ( purple7 , purple6 )
ballstopped
kick ( purple6)
pass ( purple6 , purple2 )
ballstopped
kick ( purple2)
pass ( purple2 , purple3 )
kick ( purple3 )
badPass ( purple3 , pink9 )
turnover ( purple3 , pink9 )
39
Robocup Data
• Collected human textual commentary for the 4 Robocup championship games from 2001-2004.– Avg # events/game = 2,613– Avg # English sentences/game = 509– Avg # Korean sentences/game = 499
• Each sentence matched to all events within previous 5 seconds.– Avg # MRs/sentence = 2.5 (min 1, max 12)
• Manually annotated with correct matchings of sentences to MRs (for evaluation purposes only).
•40
WASPER
• WASP with EM-like retraining to handle ambiguous training data.
• Same augmentation as added to KRISP to create KRISPER.
41

• First train KRISPER to disambiguate the data
• Then train WASP on the resulting unambiguously supervised data.
KRISPER-WASP
42
WASPER-GEN
• Determines the best matching based on generation (MR→NL).
• Score each potential NL/MR pair by using the currently trained WASP-1 generator.
• Compute NIST MT score [NIST report, 2002] between the generated sentence and the potential matching sentence.
43
Strategic Generation Learning
• For each event type (e.g. pass, kick) estimate the probability that it is described by the sportscaster.
• Requires correct NL/MR matching– Use estimated matching from tactical generation– Iterative Generation Strategy Learning
44
Iterative Generation Strategy Learning (IGSL)
• Estimates the likelihood of commenting on each event-type directly from the ambiguous training data.
• Uses EM-like self-training iterations to compute estimates.
45
English Demo
• Game clip commentated using WASPER-GEN with IGSL strategic generation, since this gave the best results for generation.
• FreeTTS was used to synthesize speech from textual output.
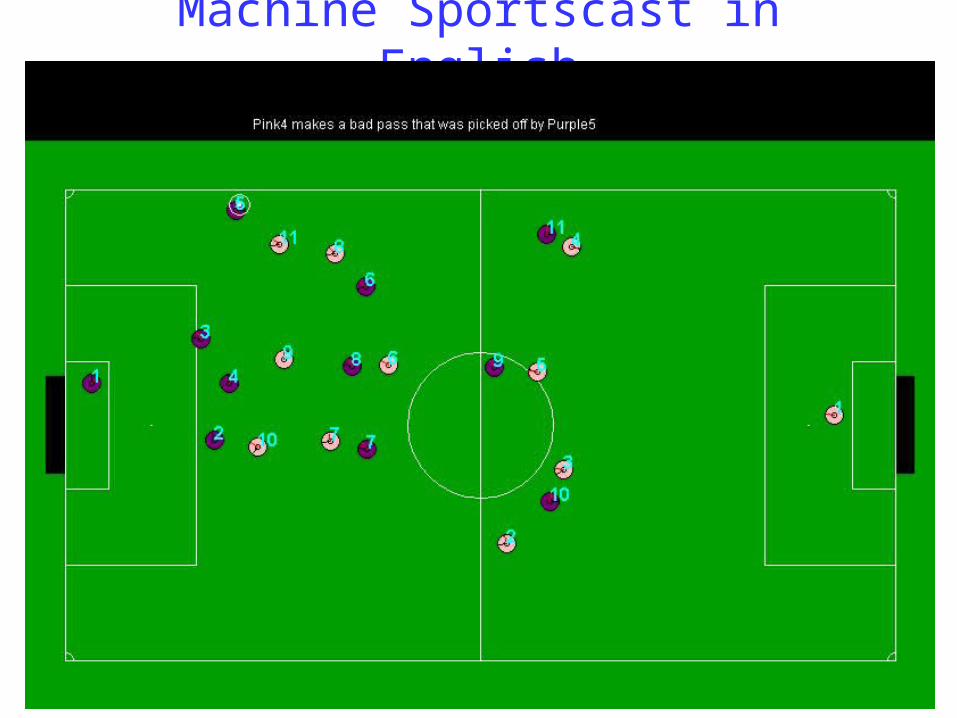
Machine Sportscast in English
47

Experimental Evaluation
• Generated learning curves by training on all combinations of 1 to 3 games and testing on all games not used for training.
• Baselines:– Random Matching: WASP trained on random choice of
possible MR for each comment.
– Gold Matching: WASP trained on correct matching of MR for each comment.
• Metrics:– Precision: % of system’s annotations that are correct
– Recall: % of gold-standard annotations correctly produced
– F-measure: Harmonic mean of precision and recall
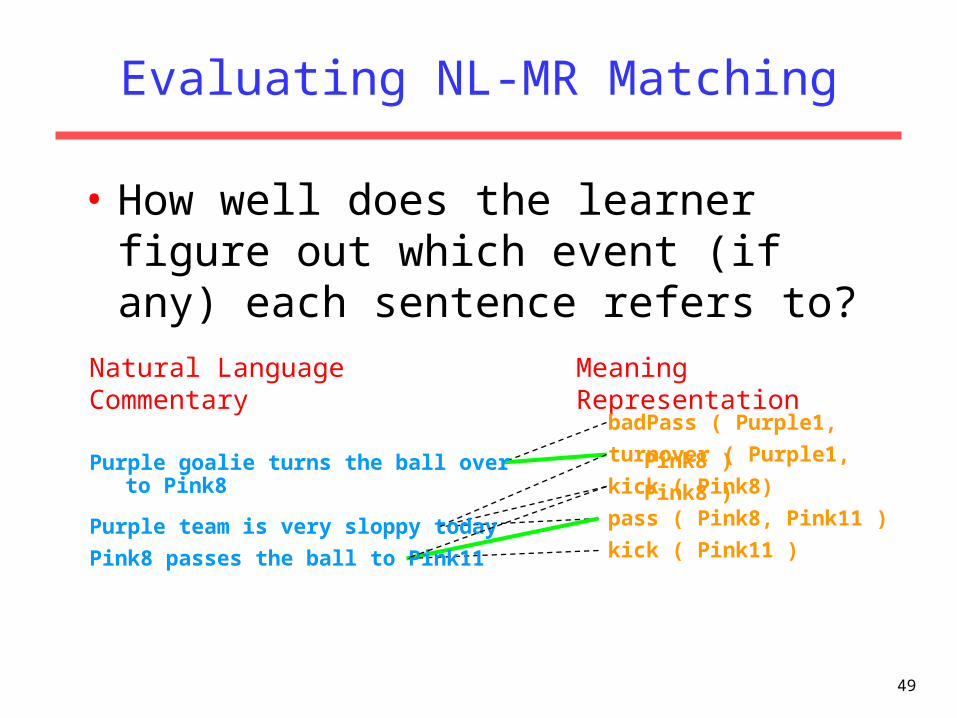
Evaluating NL-MR Matching
• How well does the learner figure out which event (if any) each sentence refers to?
49
Natural Language Commentary Meaning Representation
Purple goalie turns the ball over to Pink8
badPass ( Purple1, Pink8 )
Pink8 passes the ball to Pink11
Purple team is very sloppy today
turnover ( Purple1, Pink8 )
pass ( Pink8, Pink11 )
kick ( Pink8)
kick ( Pink11 )
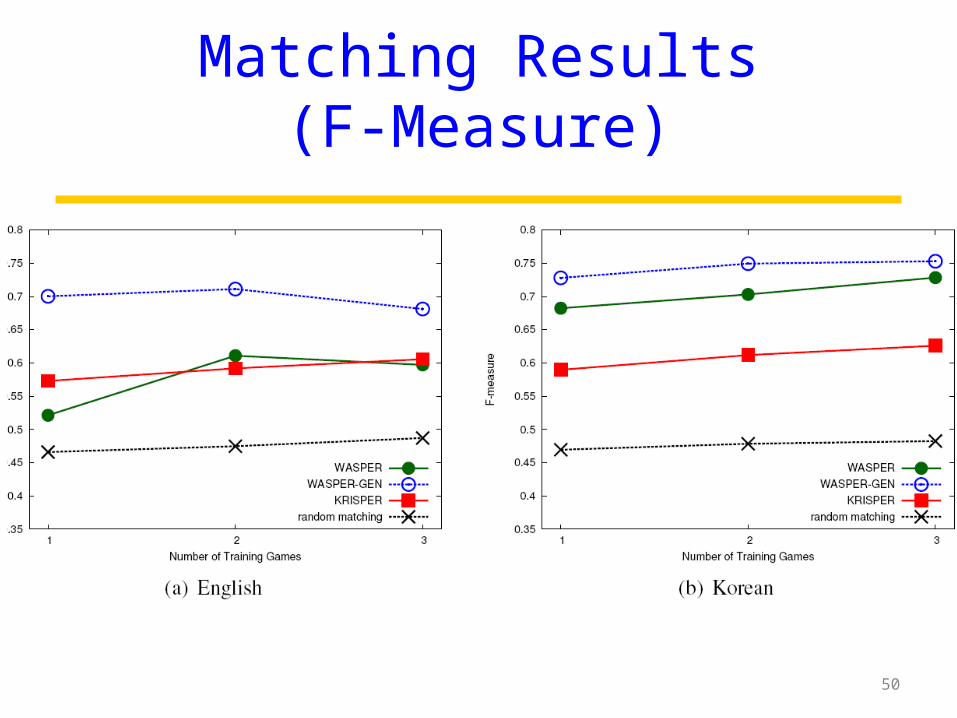
Matching Results(F-Measure)
50
Evaluating Semantic Parsing
• How well does the system learn to interpret the meaning of a novel sentence?
• Compare result to correct MR from the gold standard matches.
51
Natural Language Commentary Meaning Representation
Purple goalie looses the ball to Pink8 turnover ( Purple1, Pink8 )

Semantic Parsing Results(F-Measure)
52

Evaluating Tactical Generation• How accurately does the system generate
natural language descriptions of events?
• Use gold-standard matches to determine the correct sentence for each MR that has one.
• Evaluation Metric:– BLEU score: [Papineni et al, 2002], N=4
53
Natural Language Commentary
Purple goalie looses the ball to Pink8
Meaning Representation
turnover ( Purple1, Pink8 )
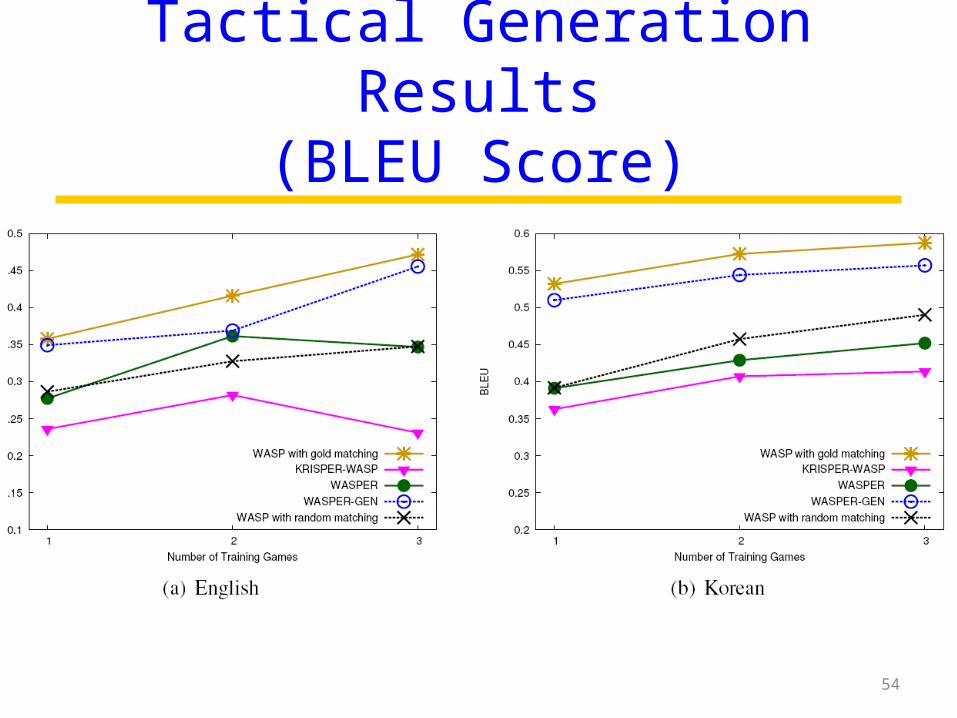
Tactical Generation Results(BLEU Score)
54
Evaluating Strategic Generation
• How well does the system predict which events the human sportscaster will mention?
55
pass ( purple7 , purple6 )
ballstopped
kick ( purple6)
pass ( purple6 , purple2 )
ballstopped
kick ( purple2)
pass ( purple2 , purple3 )
kick ( purple3 )
badPass ( purple3 , pink9 )
turnover ( purple3 , pink9 )
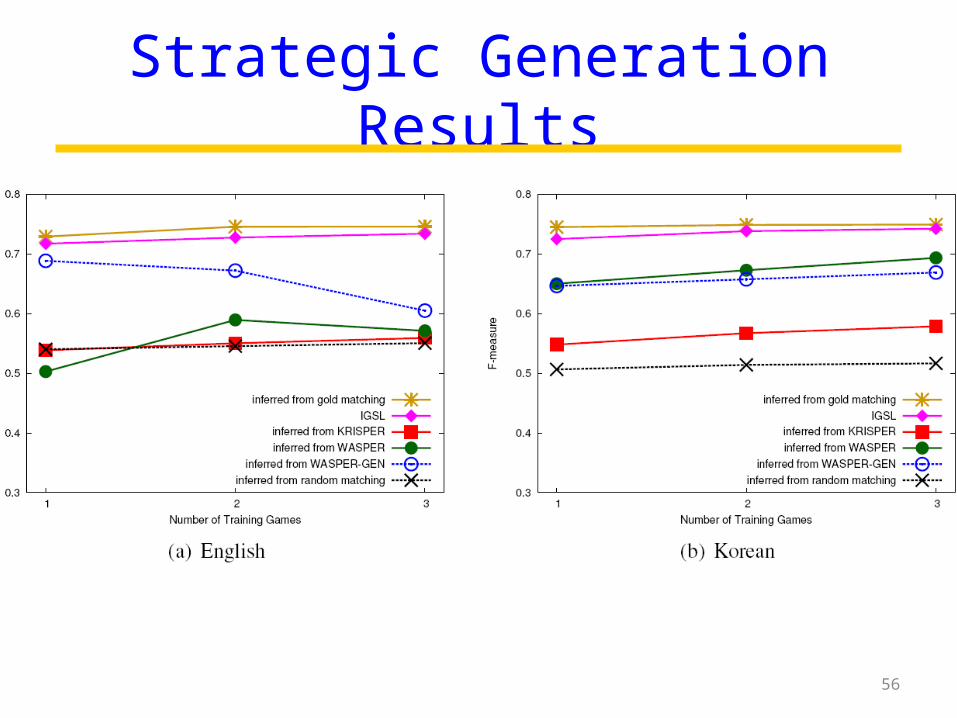
Strategic Generation Results
56

• Used Amazon’s Mechanical Turk to recruit human judges (36 English, 7 Korean judges per video)
• 8 commented game clips– 4 minute clips randomly selected from each of the
4 games– Each clip commented once by a human, and once
by the machine• Presented in random counter-balanced order• Judges were not told which ones were human or
machine generated57
Human Evaluation“Pseudo Turing Test”

Human Evaluation Metrics
ScoreEnglish Fluency
Semantic Correctness
Sportscasting Ability
5 Flawless Always Excellent
4 Good Usually Good
3 Non-native Sometimes Average
2 Disfluent Rarely Bad
1 Gibberish Never Terrible
58
Human?Also asked human judge to predict if a human or machine generated
the sportscast, knowing there was some of each in the data.

English Human Evaluation Results
59
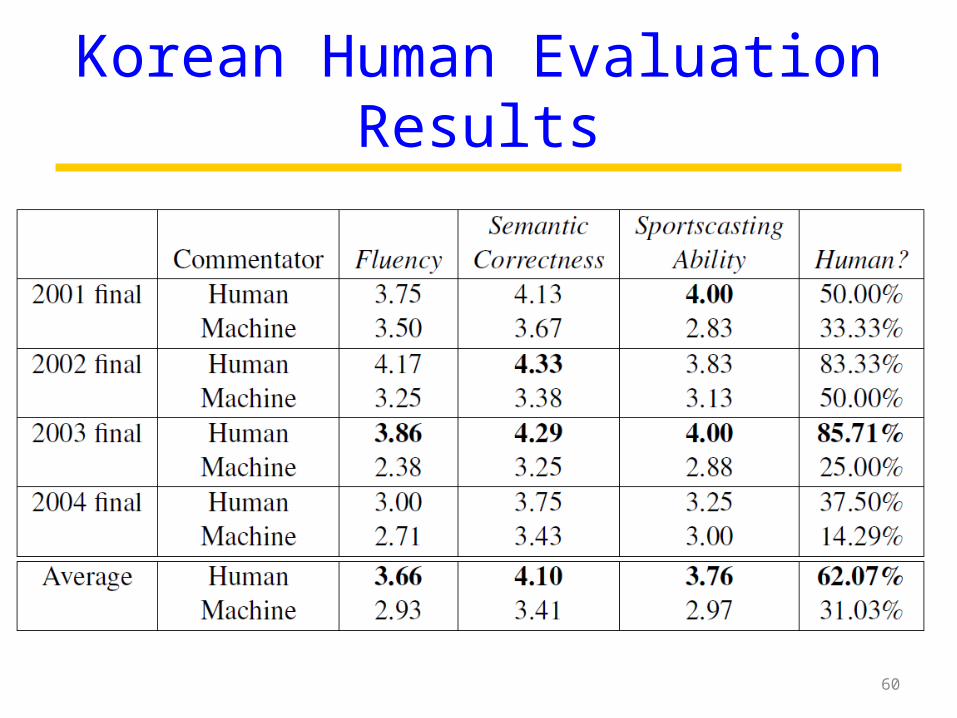
Korean Human Evaluation Results
60
61
Future Direction #1
• Grounded language learning for direction following in a virtual environments.
• Eventual goal: Virtual agents in video games and educational software that can take and give instructions in natural language.
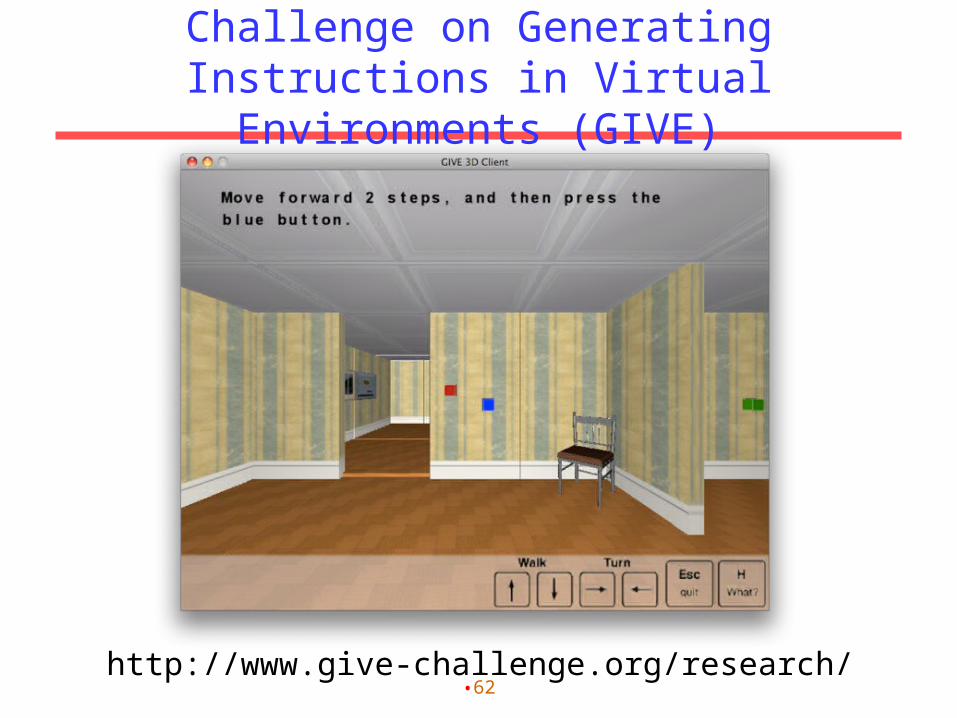
Challenge on Generating Instructions in Virtual Environments (GIVE)
http://www.give-challenge.org/research/•62

Learning Approach for Grounded Instructional Language Learning
• Passive learning– Observes human instructor guiding a human
follower
• Interactive learning as follower– Tries to follow human instructions
• Interactive learning as instructor– Generates instructions to guide human follower
•63

Future Direction #2:Learning for Language and Vision
• Natural Language Processing (NLP) and Computer Vision (CV) are both very challenging problems.
• Machine Learning (ML) is now extensively used to automate the construction of both effective NLP and CV systems.
• Generally uses supervised ML and requires difficult and expensive human annotation of large text or image/video corpora for training.
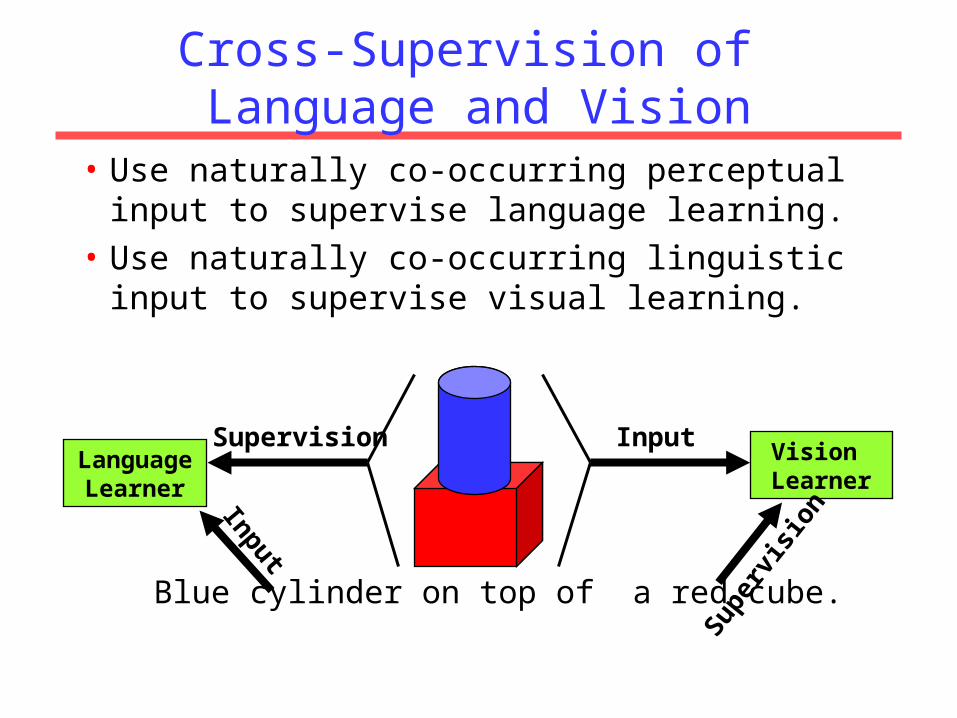
Cross-Supervision of Language and Vision
• Use naturally co-occurring perceptual input to supervise language learning.
• Use naturally co-occurring linguistic input to supervise visual learning.
Blue cylinder on top of a red cube.
Language Learner
Input
SupervisionVision
Learner
Input
Supe
rvisi
on

Activity Recognition in Video
• Recognizing activities in video generally uses supervised learning trained on human-labeled video clips.
• Linguistic information in closed captions (CCs) can be used as “weak supervision” for training activity recognizers.
• Automatically trained activity recognizers can be used to improve precision of video retrieval.
66
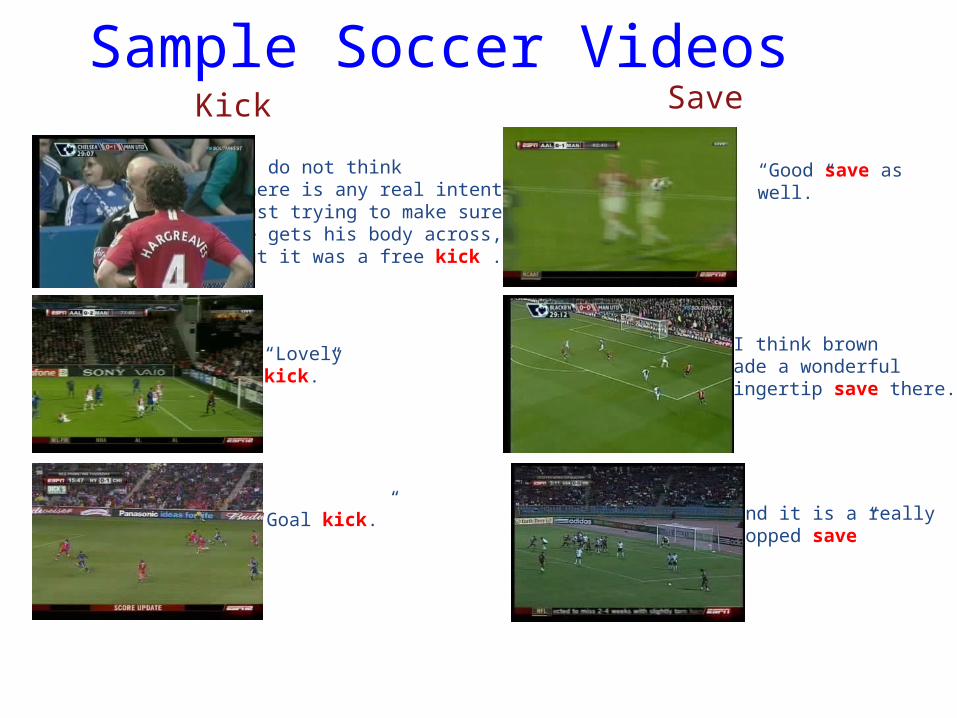
Sample Soccer Videos
“I do not thinkthere is any real intent,just trying to make surehe gets his body across,but it was a free kick .”
“Lovelykick.”
“Goal kick.”
“Good save aswell.”
“I think brownmade a wonderful fingertip save there.”
“And it is a reallychopped save”
Kick Save
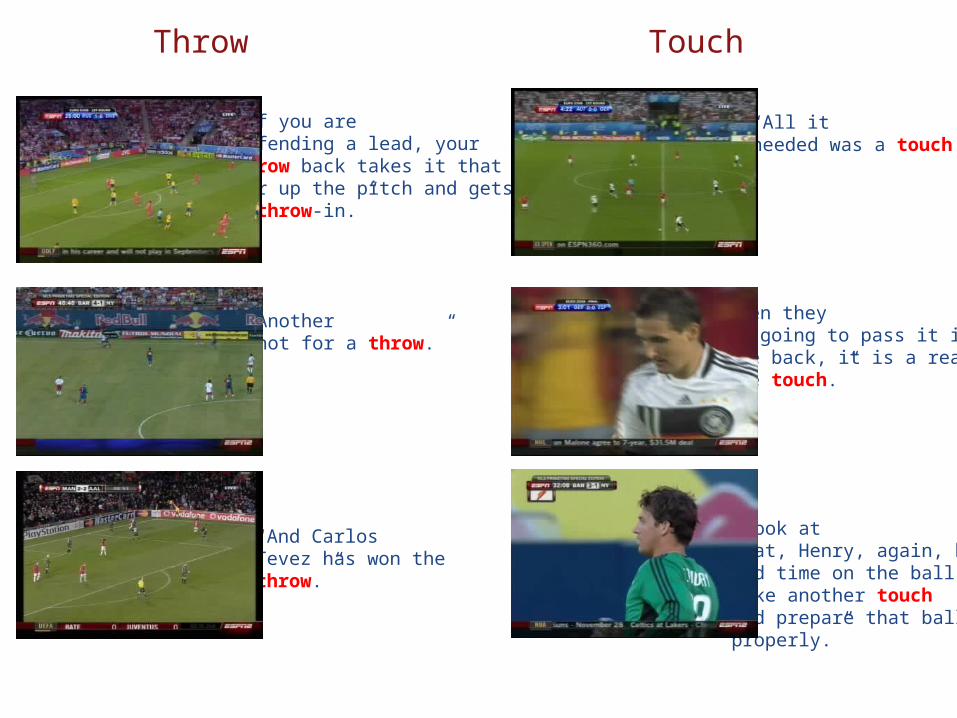
“If you aredefending a lead, yourthrow back takes it thatfar up the pitch and getsa throw-in.”
“And CarlosTevez has won thethrow.”
“Anothershot for a throw.”
“When theyare going to pass it in the back, it is a really pure touch.”
“Look atthat, Henry, again, hehad time on the ball totake another touch and prepare that ball properly.”
“All itneeded was a touch.”
Throw Touch

69
Conclusions
• Current language learning work uses expensive, unrealistic training data.
• We have developed language learning systems that can learn from sentences paired with an ambiguous perceptual environment.
• We have evaluated it on learning to sportscast simulated Robocup games where it learns to commentate games about as well as humans.
• Learning to connect language and perception is an important and exciting research problem.