Embed Size (px)
Citation preview
1
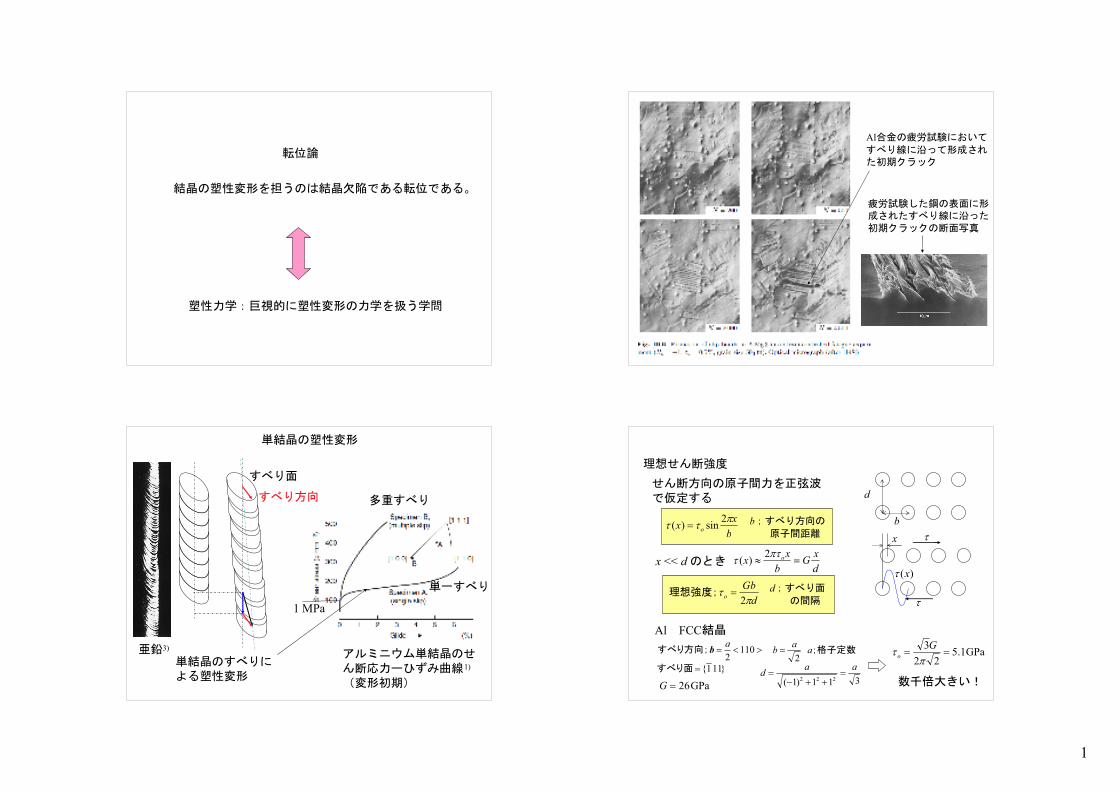
結晶の塑性変形を担うのは結晶欠陥である転位である。
転位論
塑性力学:巨視的に塑性変形の力学を扱う学問
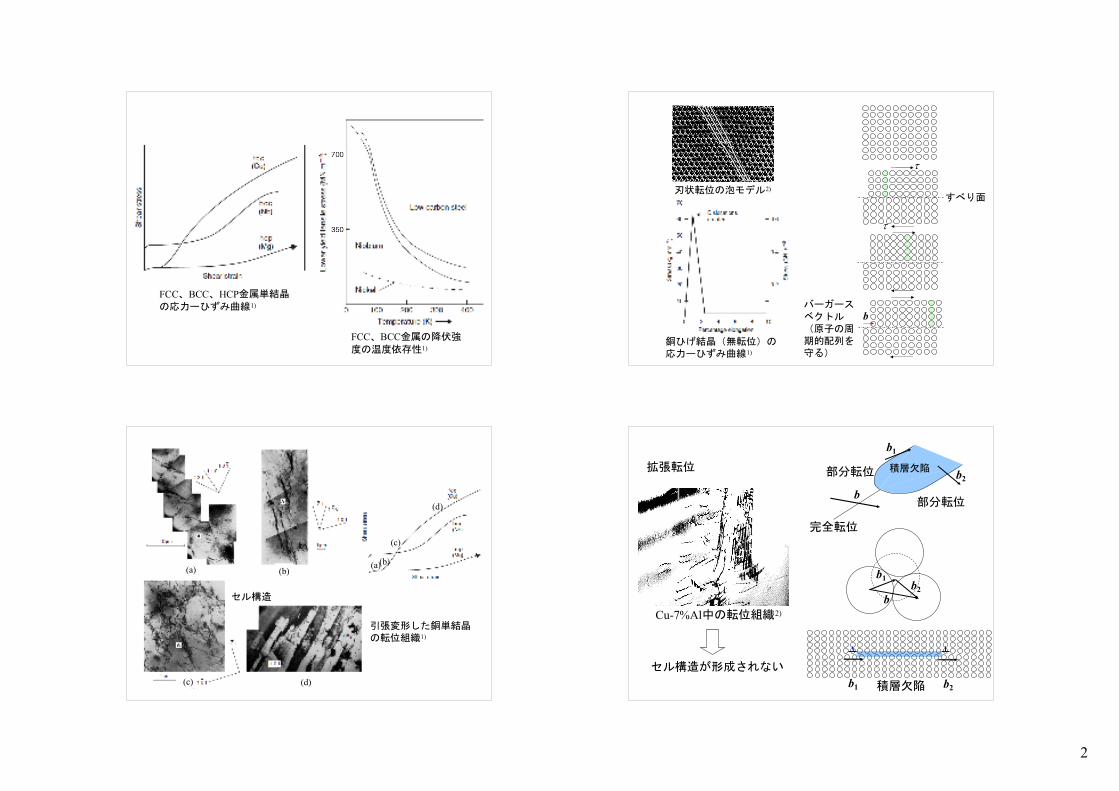
Al合金の疲労試験において
すべり線に沿って形成された初期クラック
疲労試験した鋼の表面に形成されたすべり線に沿った初期クラックの断面写真
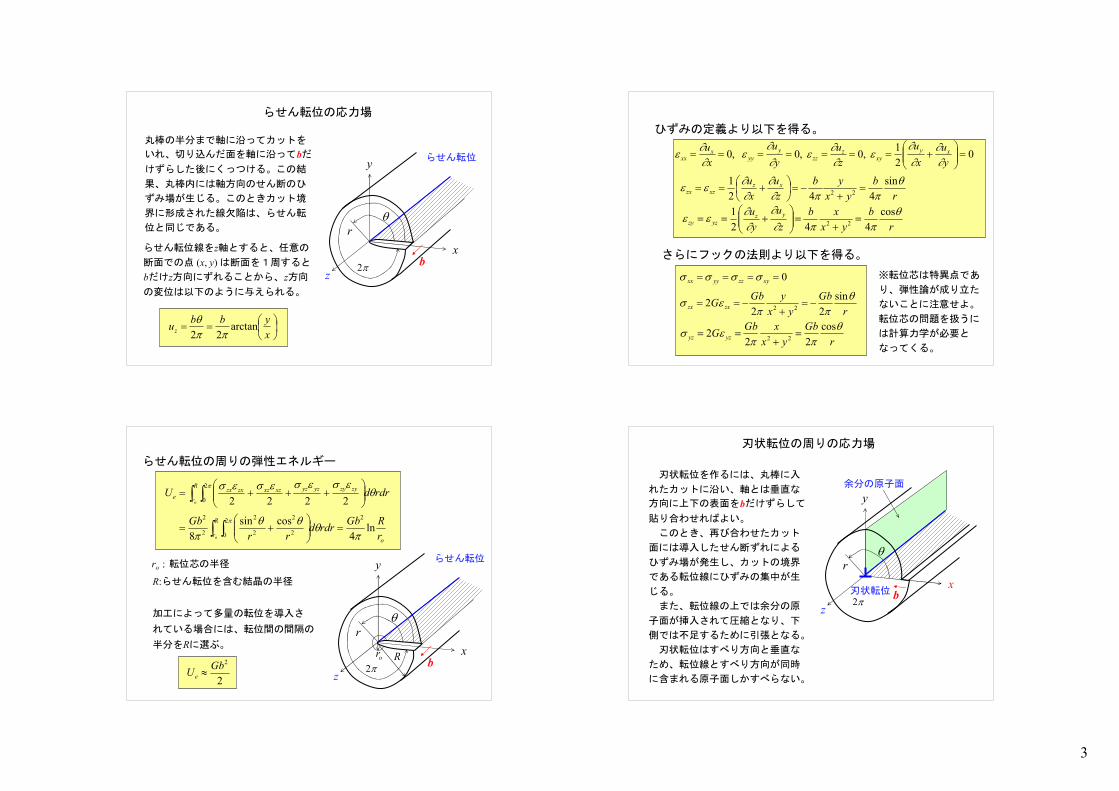
すべり面
すべり方向
単結晶のすべりによる塑性変形
単結晶の塑性変形
アルミニウム単結晶のせん断応力ーひずみ曲線1)
(変形初期)
単一すべり
多重すべり
1 MPa
亜鉛3)
理想せん断強度
d
b
x τ
τ
せん断方向の原子間力を正弦波で仮定する
b
xx o
πττ
2sin)( = b;すべり方向の
原子間距離
)(xτx << d のとき
d
xG
b
xx o =≈
πττ
2)(
d
Gbo π
τ2
=理想強度; d;すべり面
の間隔
Al FCC結晶
><= 1102
abすべり方向;
}111{=すべり面
311)1( 222
aad =
++−=
;格子定数aa
b2
= GPa1.522
3==
πτ
Go
GPa26=G 数千倍大きい!
2
FCC、BCC、HCP金属単結晶
の応力ーひずみ曲線1)
FCC、BCC金属の降伏強
度の温度依存性1)
刃状転位の泡モデル2)
τ
τ
銅ひげ結晶(無転位)の応力ーひずみ曲線1)
b
バーガースベクトル(原子の周期的配列を守る)
すべり面
引張変形した銅単結晶の転位組織1)
(a)(b)
(c)
(d)
セル構造
(a) (b)
(c) (d)
拡張転位
積層欠陥
Cu-7%Al中の転位組織2)
b
b1
b2積層欠陥
完全転位
部分転位
部分転位
b1 b2
b
b1b2
セル構造が形成されない
3
らせん転位の応力場
丸棒の半分まで軸に沿ってカットを
いれ、切り込んだ面を軸に沿ってbだ
けずらした後にくっつける。この結
果、丸棒内には軸方向のせん断のひ
ずみ場が生じる。このときカット境
界に形成された線欠陥は、らせん転
位と同じである。
らせん転位線をz軸とすると、任意の
断面での点 (x, y) は断面を1周すると
bだけz方向にずれることから、z方向
の変位は以下のように与えられる。
==x
ybbuz arctan
22 ππθ
b
x
z
y
θr
らせん転位
2π
ひずみの定義より以下を得る。
02
1 ,0 ,0 ,0 =
+=======
y
u
x
u
z
u
y
u
x
u xy
xyz
zz
y
yyx
xx ∂∂
∂∂
ε∂∂
ε∂∂
ε∂∂
ε
r
b
yx
yb
z
u
x
u xzxzzx
θππ∂
∂∂∂
εεsin
442
122
=+
−=
+==
r
b
yx
xb
z
u
y
u yzyzzy
θππ∂
∂∂∂
εεcos
442
122
=+
=
+==
さらにフックの法則より以下を得る。
0==== xyzzyyxx σσσσ
r
Gb
yx
yGbG zxzx
θππ
εσsin
222
22−=
+−==
r
Gb
yx
xGbG yzyz
θππ
εσcos
222
22=
+==
※転位芯は特異点であ
り、弾性論が成り立た
ないことに注意せよ。
転位芯の問題を扱うに
は計算力学が必要と
なってくる。
らせん転位の周りの弾性エネルギー
o
R
r
R
r
zyzyyzyzxzxzzxzxe
r
RGbrdrd
rr
Gb
rdrdU
o
o
ln4
cossin
8
2222
22
0 2
2
2
2
2
2
2
0
πθ
θθπ
θεσεσεσεσ
π
π
=
+=
+++=
∫ ∫
∫ ∫
b
x
z
y
θr
らせん転位
2πor R
R:らせん転位を含む結晶の半径
加工によって多量の転位を導入さ
れている場合には、転位間の間隔の
半分をRに選ぶ。
ro;転位芯の半径
2
2GbUe ≈
刃状転位の周りの応力場
刃状転位を作るには、丸棒に入
れたカットに沿い、軸とは垂直な
方向に上下の表面をbだけずらして
貼り合わせればよい。
このとき、再び合わせたカット
面には導入したせん断ずれによる
ひずみ場が発生し、カットの境界
である転位線にひずみの集中が生
じる。
また、転位線の上では余分の原
子面が挿入されて圧縮となり、下
側では不足するために引張となる。
刃状転位はすべり方向と垂直な
ため、転位線とすべり方向が同時
に含まれる原子面しかすべらない。
b
x
z
y
θr
刃状転位2π
余分の原子面
4
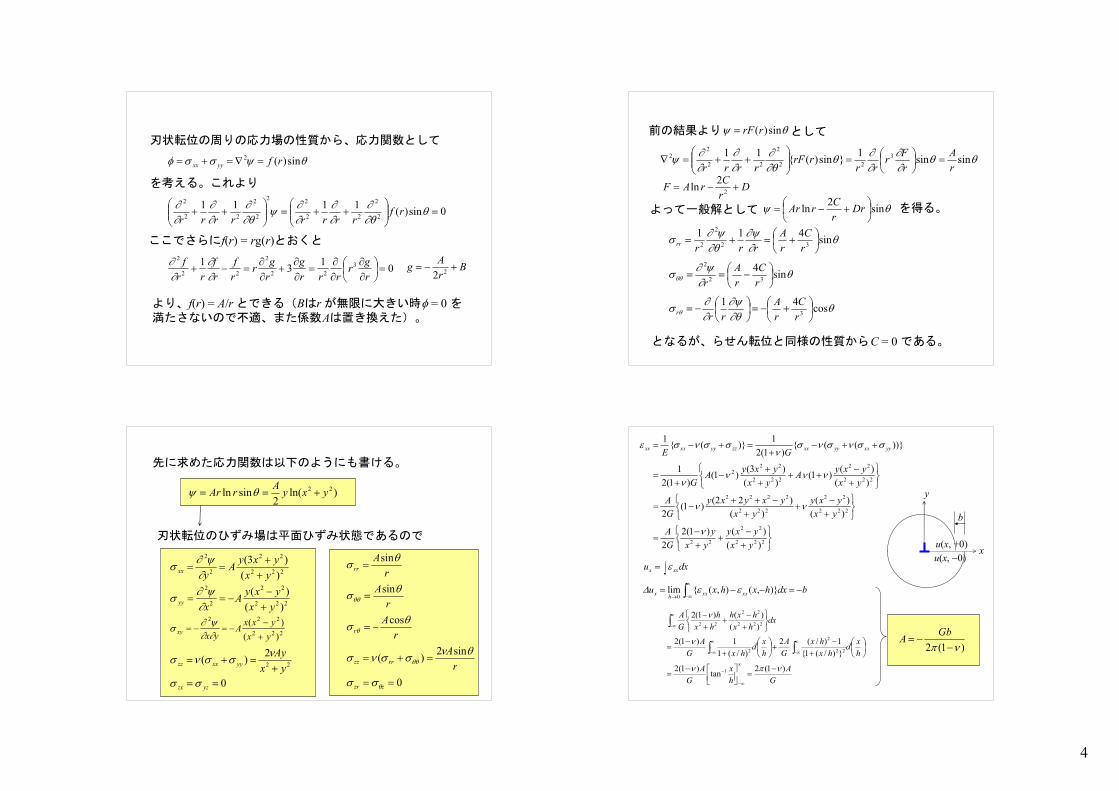
刃状転位の周りの応力場の性質から、応力関数として
θψσσφ sin)(2 rfyyxx =∇=+=
を考える。これより
0sin)(1111
2
2
22
22
2
2
22
2
=
++=
++ θ
∂θ∂
∂∂
∂∂
ψ∂θ∂
∂∂
∂∂
rfrrrrrrrr
ここでさらにf(r) = rg(r)とおくと
01
31 3
22
2
22
2
=
∂∂
∂∂
=∂∂
+∂∂
=−+r
gr
rrr
g
r
gr
r
f
r
f
rr
f
∂∂
∂∂
Br
Ag +−=
22
より、f(r) = A/r とできる(Bはr が無限に大きい時φ = 0 を満たさないので不適、また係数Aは置き換えた)。
θθ∂∂
∂∂
θ∂θ∂
∂∂
∂∂
ψ sinsin1
}sin)({11 3
22
2
22
22
r
A
r
Fr
rrrrF
rrrr=
=
++=∇
前の結果より θψ sin)(rrF= として
Dr
CrAF +−=
2
2ln
よって一般解として θψ sin2
ln
+−= Drr
CrAr を得る。
θ∂∂ψ
∂θψ∂
σ sin411
32
2
2
+=+=r
C
r
A
rrrrr
θ∂
ψ∂σθθ sin
432
2
−==r
C
r
A
r
θ∂θ∂ψ
∂∂
σ θ cos41
3
+−=
−=r
C
r
A
rrr
となるが、らせん転位と同様の性質からC = 0 である。
)ln(2
sinln 22 yxyA
rAr +== θψ
先に求めた応力関数は以下のようにも書ける。
222
22
2
2
)(
)3(
yx
yxyA
yxx +
+==
∂ψ∂
σ
222
22
2
2
)(
)(
yx
yxyA
xyy +
−−==
∂ψ∂
σ
222
222
)(
)(
yx
yxxA
yxxy
+
−−=−=
∂∂ψ∂
σ
22
2)(
yx
Ayyyxxzz +
=+=ν
σσνσ
0== yzzx σσ
刃状転位のひずみ場は平面ひずみ状態であるので
r
Arr
θσ
sin=
r
A θσθθ
sin=
r
Ar
θσ θ
cos−=
r
Arrzz
θνσσνσ θθ
sin2)( =+=
0== zzr θσσ
u(x, +0)
u(x, −0)
b
x
y
+−
++−
=
+−
++
−++−=
+−
+++
+−
+=
++−+
=+−=
222
22
22
222
22
222
2222
222
22
222
222
)(
)()1(2
2
)(
)(
)(
)22()1(
2
)(
)()1(
)(
)3()1(
)1(2
1
))}(({)1(2
1)}({
1
yx
yxy
yx
y
G
A
yx
yxy
yx
yxyxy
G
A
yx
yxyA
yx
yxyA
G
GEyyxxyyxxzzyyxxxx
ν
νν
νννν
σσνσνσν
σσνσε
bdxhxhxu xxxxh
x −=−−= ∫∞
∞−→)},(),({lim
0εε∆
)1(2 νπ −−=
GbA
dxu xxx ∫= ε
G
A
h
x
G
A
h
xd
hx
hx
G
A
h
xd
hxG
A
dxhx
hxh
hx
h
G
A
)1(2tan
)1(2
})/(1{
1)/(2
)/(1
1)1(2
)(
)()1(2
1
22
2
2
222
22
22
νπν
ν
ν
−=
−=
+
−+
+
−=
+−
++−
∞
∞−
−
∞
∞−
∞
∞−
∞
∞−
∫∫
∫
5
222
22
)(
)3(
)1(2 yx
yxyGbxx +
+−
−=νπ
σ
222
22
)(
)(
)1(2 yx
yxyGbyy +
−−
=νπ
σ
222
22
)(
)(
)1(2 yx
yxxGbxy +
−−
=νπ
σ
22)1( yx
yGbzz +−
=νπ
νσ
0== yzzx σσ
r
Gbrr
θνπ
σsin
)1(2 −−=
r
Gb θνπ
σθθsin
)1(2 −−=
r
Gbr
θνπ
σ θcos
)1(2 −=
r
Gbzz
θνπ
νσ
sin
)1( −−=
0== zzr θσσ
)ln()1(4
sinln)1(2
22 yxyGb
rrGb
+−
−=−
−=νπ
θνπ
ψ
22)1(3
)1(sin
)1(3
)1(
3 yx
yGb
r
Gbzzrrh +−
+−=
−+
−=++
=νπ
νθνπ
νσσσσ θθ
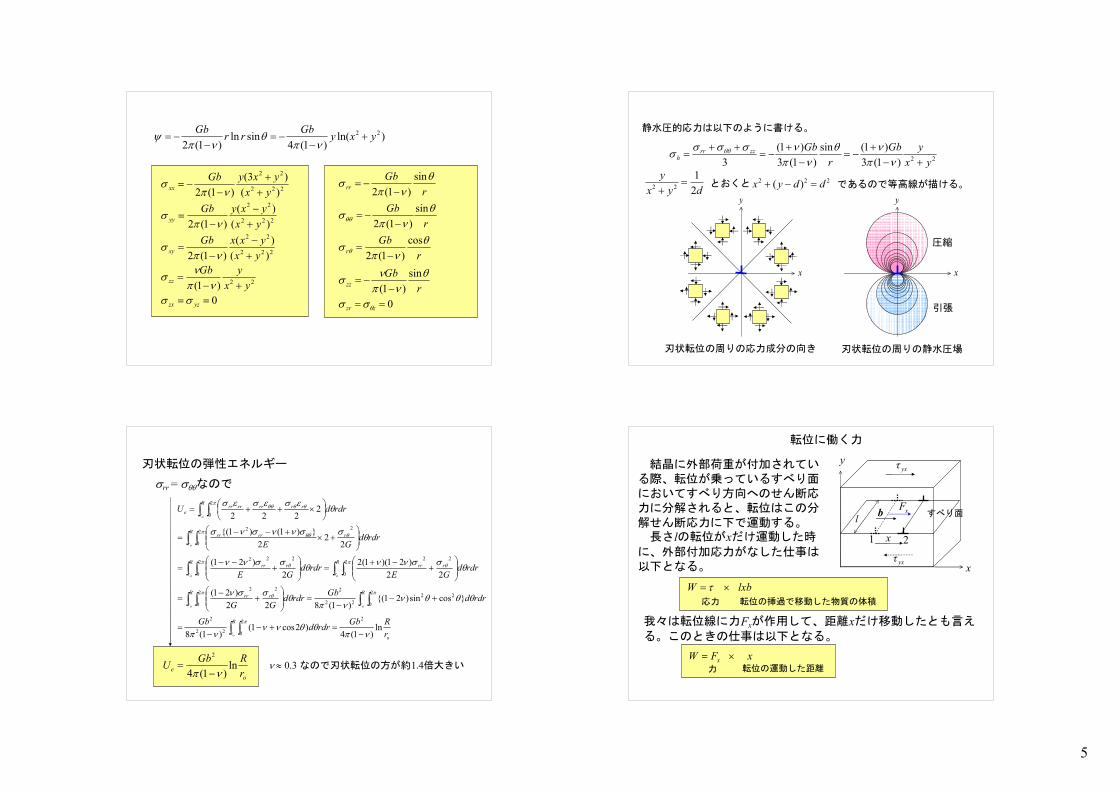
静水圧的応力は以下のように書ける。
dyx
y
2
122
=+
とおくと 222 )( ddyx =−+
x
y
であるので等高線が描ける。
引張
圧縮
刃状転位の周りの応力成分の向き 刃状転位の周りの静水圧場
x
y
刃状転位の弾性エネルギー
o
R
r
R
r
R
r
rrr
R
r
rrrR
r
rrr
R
r
rrrrr
R
r
rrrrrrrre
r
RGbrdrd
Gb
rdrdGb
rdrdGG
rdrdGE
rdrdGE
rdrdGE
rdrdU
o
oo
oo
o
o
ln)1(4
)2cos1()1(8
}cossin)21{()1(822
)21(
22
)21)(1(2
2
)21(
22
2
})1()1{(
2222
22
022
2
2
0
22
22
22
0
22
2
0
222
0
222
2
0
22
2
0
νπθθνν
νπ
θθθννπ
θσσν
θσσνν
θσσνν
θσσννσνσ
θεσεσεσ
π
ππθ
πθ
πθ
πθθθ
πθθθθ
−=+−
−=
+−−
=
+
−=
+
−+=
+
−−=
+×
+−−=
×++=
∫ ∫
∫ ∫∫ ∫
∫ ∫∫ ∫
∫ ∫
∫ ∫
σrr = σθθなので
o
er
RGbU ln
)1(4
2
νπ −= ν ≈ 0.3 なので刃状転位の方が約1.4倍大きい
転位に働く力
すべり面
結晶に外部荷重が付加されている際、転位が乗っているすべり面においてすべり方向へのせん断応力に分解されると、転位はこの分解せん断応力に下で運動する。 長さlの転位がxだけ運動した時
に、外部付加応力がなした仕事は以下となる。
lxbW ×= τ転位の挿過で移動した物質の体積
我々は転位線に力Fxが作用して、距離xだけ移動したとも言え
る。このときの仕事は以下となる。
xFW x ×=
応力
力 転位の運動した距離
b
yxτ
l
1
x
y
x 2
yxτ
xF
6
両者は等価であるので、すべり面上を運動する転位に働く力は以下のようになる。
blFx τ= 単位長さあたりの力bl
Fx τ=or
l
ll ∆+
b
τ
F
T T
A B
Rθ2θ θ
θsinT θsinT
長さlの転位片が外部せん断応力τの下、すべり面を運動して長さl + ∆lの弧状の片ABになったものとする。
弾性エネルギーの増加
lGb
lGb
llGb
Ue
∆
∆∆
2
2)(
22
22
=
−+=
l
ll ∆+
b
τ
F
T TA B
Rθ2θ θ
θsinT θsinT
転位線の接線方向に線張力Tが
作用して転位線の長さを縮めようとする。
線張力Tによる仕事
eULTW ∆∆∆ ==
2
2GbT =線張力;
転位に働く力のつりあい
θτ sin2TblF ==R
Gb
l
Gb
2sin == θτ
θ < π/2のとき、転位が乗り越える障害物との相互作用θ = π/2のとき、転位源(フランクリード源)もしくは 転位が迂回する障害物との相互作用
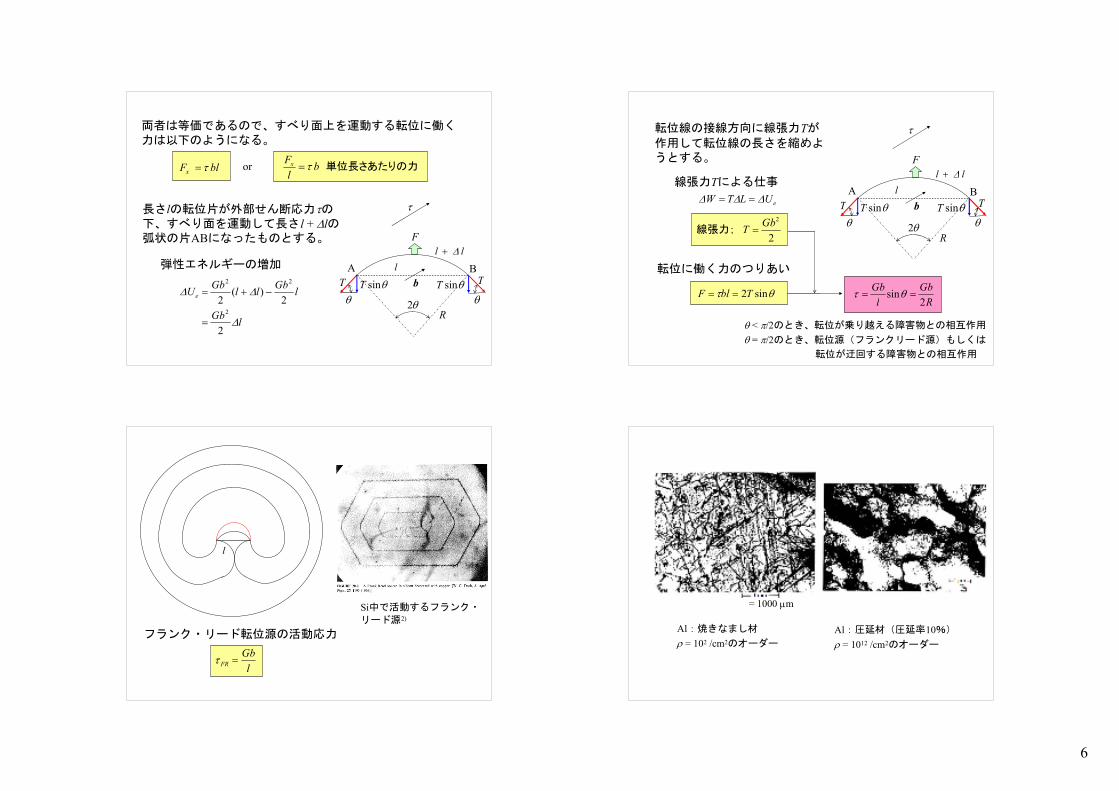
l
フランク・リード転位源の活動応力
l
GbFR =τ
Si中で活動するフランク・
リード源2)
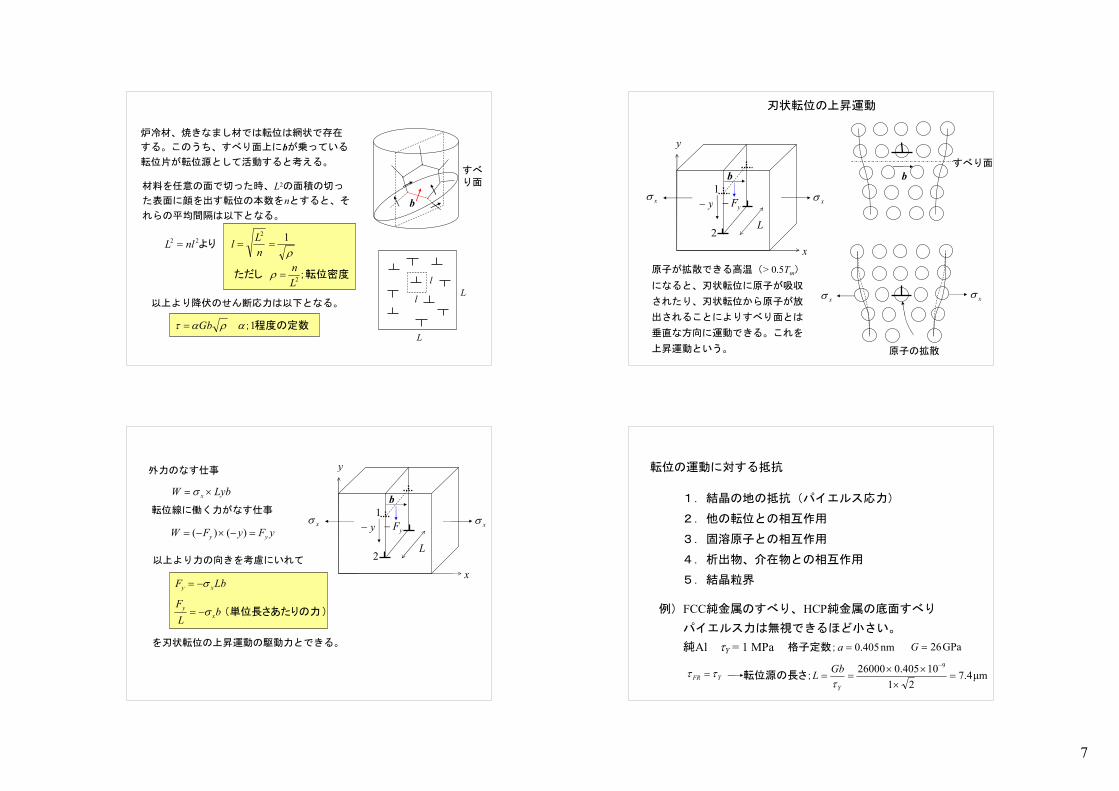
= 1000 µm
Al:焼きなまし材
ρ = 102 /cm2のオーダー
Al:圧延材(圧延率10%)
ρ = 1012 /cm2のオーダー
7
b
l
l
L
L
すべり面
炉冷材、焼きなまし材では転位は網状で存在
する。このうち、すべり面上にbが乗っている
転位片が転位源として活動すると考える。
材料を任意の面で切った時、L2の面積の切っ
た表面に顔を出す転位の本数をnとすると、そ
れらの平均間隔は以下となる。
ρ12
22 ===n
LlnlL より
転位密度;ただし 2L
n=ρ
以上より降伏のせん断応力は以下となる。
程度の定数; 1αρατ Gb=
刃状転位の上昇運動
xσ xσ
原子の拡散
すべり面
bb
xσ
L
1
x
y
y− xσyF−
2
原子が拡散できる高温(> 0.5Tm)
になると、刃状転位に原子が吸収
されたり、刃状転位から原子が放
出されることによりすべり面とは
垂直な方向に運動できる。これを
上昇運動という。
b
xσ
L
1
x
y
y− xσyF−
2
外力のなす仕事
LybW x ×= σ
転位線に働く力がなす仕事
yFyFW yy =−×−= )()(
以上より力の向きを考慮にいれて
LbF xy σ−=
)(単位長さあたりの力bL
Fx
y σ−=
を刃状転位の上昇運動の駆動力とできる。
転位の運動に対する抵抗
1.結晶の地の抵抗(パイエルス応力)
2.他の転位との相互作用
3.固溶原子との相互作用
4.析出物、介在物との相互作用
5.結晶粒界
例)FCC純金属のすべり、HCP純金属の底面すべり
パイエルス力は無視できるほど小さい。
純Al τY = 1 MPa
YFR ττ = µm4.721
10405.026000 9
=×
××==
−
Y
GbL
τ転位源の長さ;
nm405.0=a格子定数; GPa26=G
8
b
−=kb
d
k
GP
πτ
2exp
2
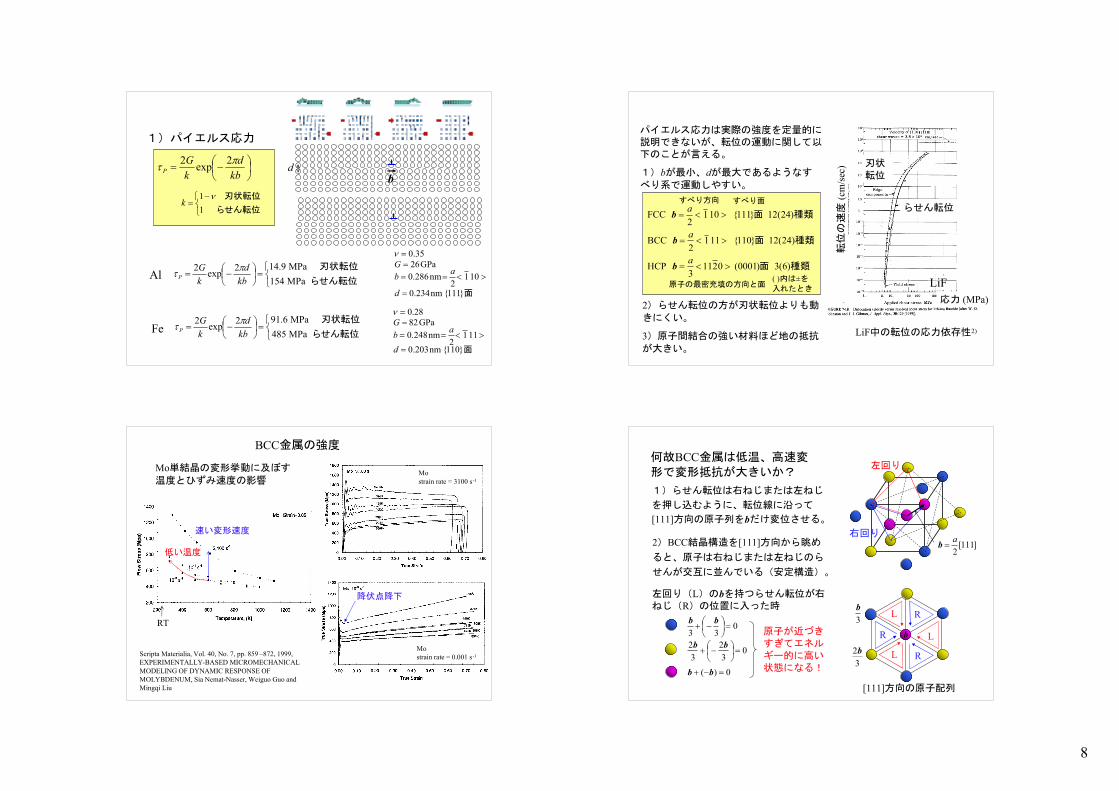
1)パイエルス応力
−
=らせん転位
刃状転位
1
1 νk
d
Al
=
−=らせん転位
刃状転位
MPa154
MPa9.142exp
2
kb
d
k
GP
πτ
35.0=ν
Fe
=
−=らせん転位
刃状転位
MPa485
MPa6.912exp
2
kb
d
k
GP
πτ
28.0=νGPa82=G
GPa26=G
><== 1112
nm248.0a
b
面}110{nm203.0=d
><== 1012
nm286.0a
b
面}111{nm234.0=d応力 (MPa)
転位の速度
(cm
/sec)
らせん転位
刃状転位
LiF
LiF中の転位の応力依存性2)
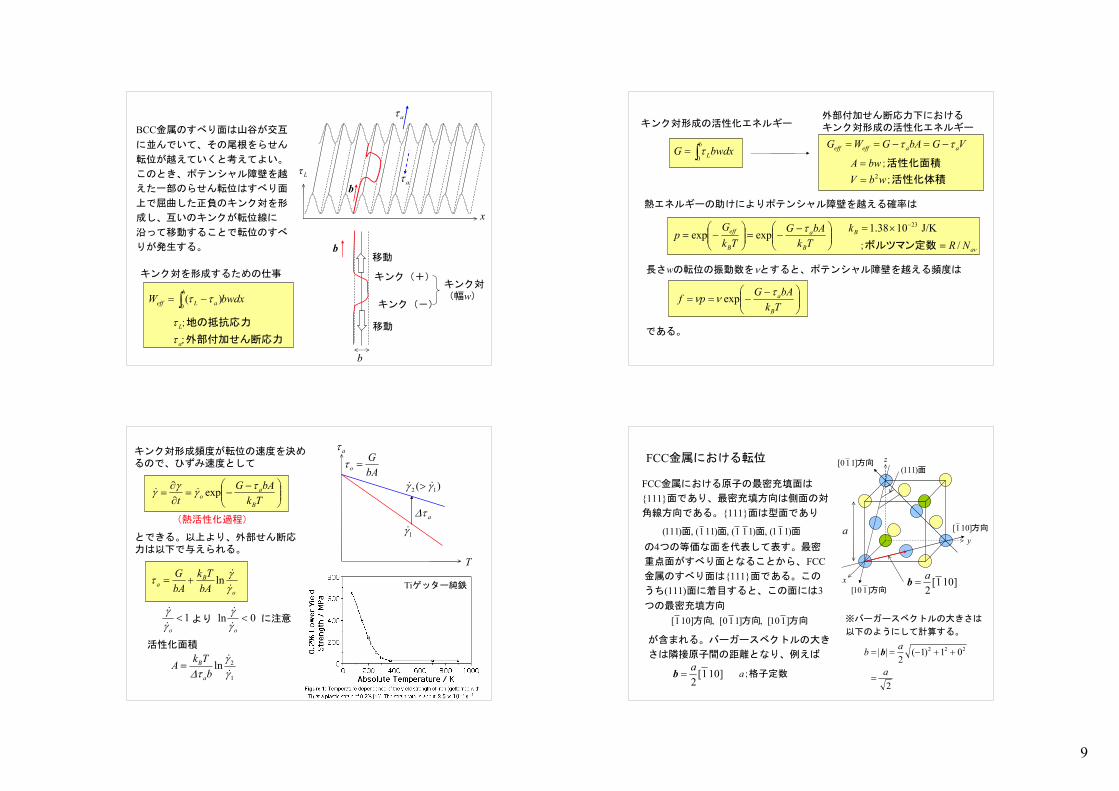
パイエルス応力は実際の強度を定量的に説明できないが、転位の運動に関して以下のことが言える。
1)bが最小、dが最大であるようなす
べり系で運動しやすい。
種類面
種類面
種類面
)6(3)0001(02113
HCP
)24(12}110{1112
BCC
)24(12}111{1012
FCC
><=
><=
><=
a
a
a
b
b
b
原子の最密充填の方向と面( )内は±を
入れたとき
2)らせん転位の方が刃状転位よりも動
きにくい。
3)原子間結合の強い材料ほど地の抵抗
が大きい。
すべり方向 すべり面
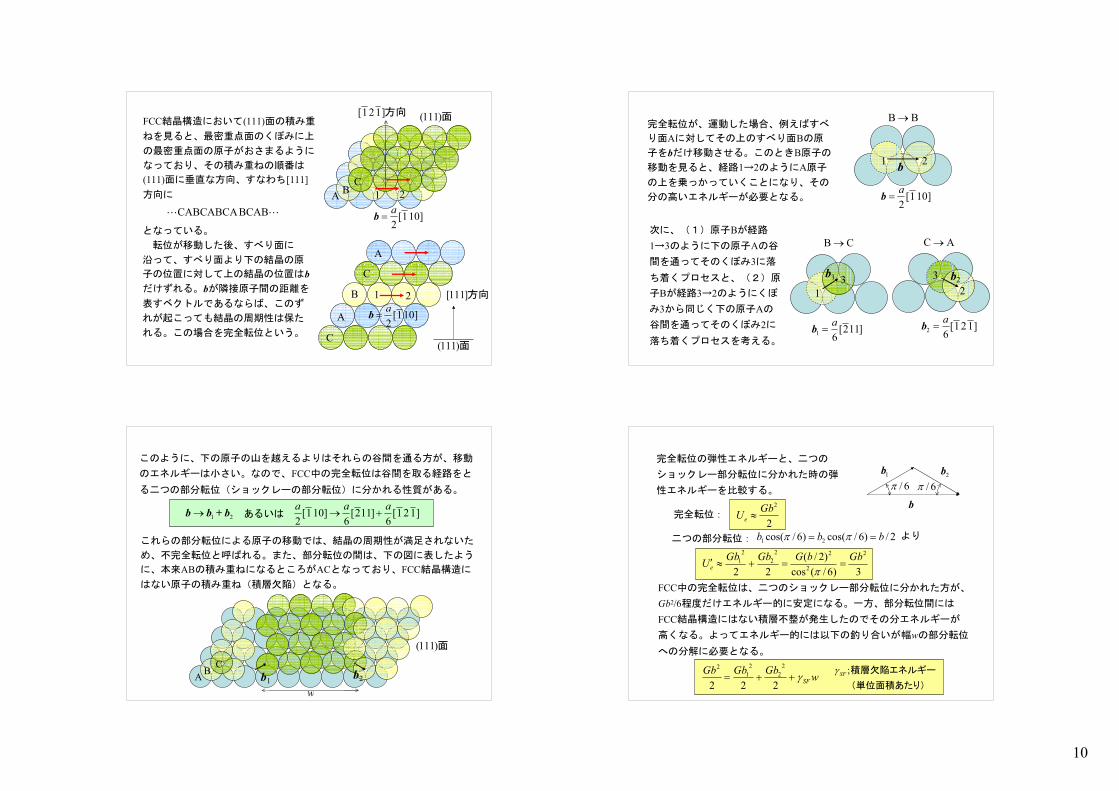
Mo単結晶の変形挙動に及ぼす
温度とひずみ速度の影響
Scripta Materialia, Vol. 40, No. 7, pp. 859 –872, 1999,
EXPERIMENTALLY-BASED MICROMECHANICAL
MODELING OF DYNAMIC RESPONSE OF
MOLYBDENUM, Sia Nemat-Nasser, Weiguo Guo and
Mingqi Liu
速い変形速度
RT
降伏点降下
Mo
strain rate = 3100 s -1
Mo
strain rate = 0.001 s -1
BCC金属の強度
低い温度
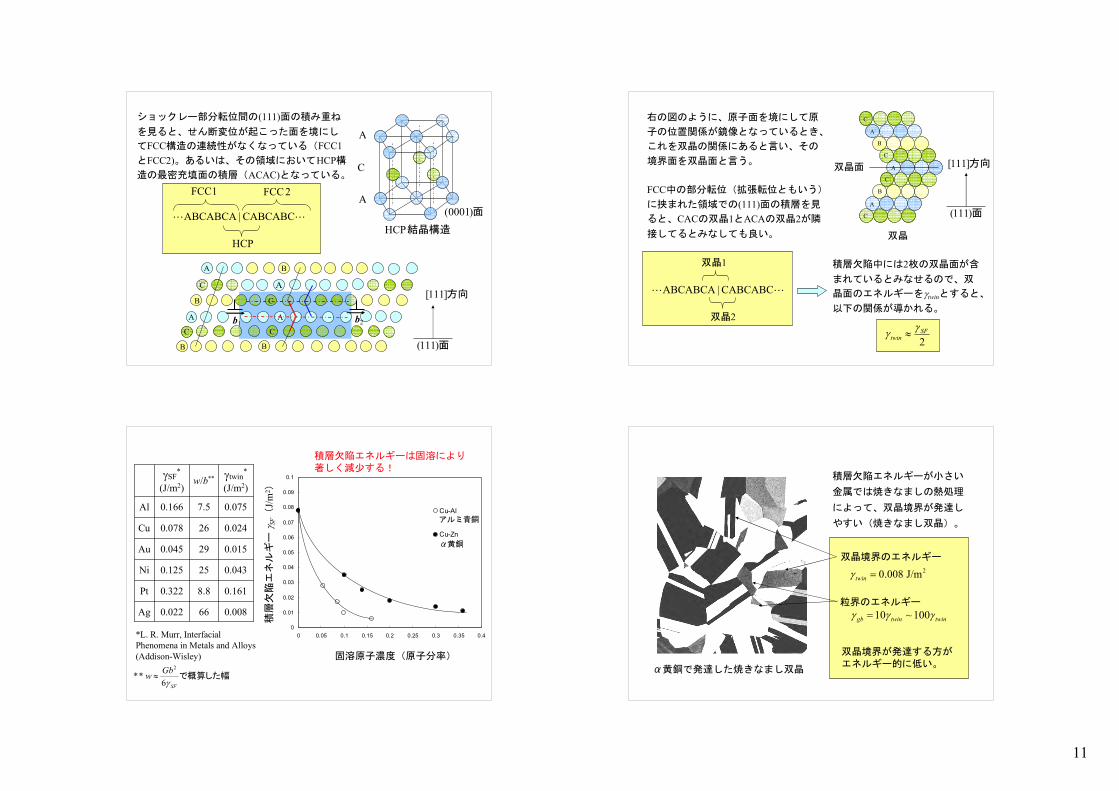
何故BCC金属は低温、高速変形で変形抵抗が大きいか?
]111[2
a=b
左回り
右回り
1)らせん転位は右ねじまたは左ねじ
を押し込むように、転位線に沿って
[111]方向の原子列をbだけ変位させる。
2)BCC結晶構造を[111]方向から眺め
ると、原子は右ねじまたは左ねじのら
せんが交互に並んでいる(安定構造)。
[111]方向の原子配列
L
L
L
R
R
R
3
b
3
2b
b
左回り(L)のbを持つらせん転位が右ねじ(R)の位置に入った時
033
=
−+bb
03
2
3
2=
−+
bb
0)( =−+ bb
原子が近づきすぎてエネルギー的に高い状態になる!
9
b
キンク(+)
キンク(-)
キンク対(幅w)
x
Lτ
移動
移動
BCC金属のすべり面は山谷が交互
に並んでいて、その尾根をらせん
転位が越えていくと考えてよい。
このとき、ポテンシャル障壁を越
えた一部のらせん転位はすべり面
上で屈曲した正負のキンク対を形
成し、互いのキンクが転位線に
沿って移動することで転位のすべ
りが発生する。
b
キンク対を形成するための仕事
bwdxWb
aLeff ∫ −=0
)( ττ
;外部付加せん断応力
;地の抵抗応力
a
L
τ
τ
aτ
aτb
bwdxGb
L∫=0τ
キンク対形成の活性化エネルギー
VGbAGWG aaeffeff ττ −=−==
;活性化面積bwA =
;活性化体積wbV 2=
外部付加せん断応力下におけるキンク対形成の活性化エネルギー
熱エネルギーの助けによりポテンシャル障壁を越える確率は
−−=
−=
Tk
bAG
Tk
Gp
B
a
B
eff τexpexp
av
B
NR
k
/
J/K1038.1 23
=
×= −
;ボルツマン定数
長さwの転位の振動数をνとすると、ポテンシャル障壁を越える頻度は
−−==
Tk
bAGpf
B
aτνν exp
である。
o
Ba
bA
Tk
bA
G
γγ
τɺ
ɺln+=
とできる。以上より、外部せん断応力は以下で与えられる。
1<oγ
γɺ
ɺより 0ln <
oγγɺ
ɺ
aτ
T
に注意
bA
Go =τ
1γɺ
)( 12 γγ ɺɺ >
Tiゲッター純鉄
aτ∆
1
2lnγγ
τ∆ ɺ
ɺ
b
TkA
a
B=
活性化面積
−−=
∂∂
=Tk
bAG
t B
ao
τγ
γγ expɺɺ
(熱活性化過程)
キンク対形成頻度が転位の速度を決めるので、ひずみ速度として FCC金属における転位
x
y
z
面)111(
方向]101[
方向]110[
方向]110[
]101[2
a=b
FCC金属における原子の最密充填面は
{111}面であり、最密充填方向は側面の対
角線方向である。{111}面は型面であり
面面面面 )111(,)111(,)111(,)111(
の4つの等価な面を代表して表す。最密
重点面がすべり面となることから、FCC
金属のすべり面は{111}面である。この
うち(111)面に着目すると、この面には3
つの最密充填方向
方向方向方向 ]110[,]110[,]101[
が含まれる。バーガースベクトルの大き
さは隣接原子間の距離となり、例えば
]101[2
a=b ;格子定数a
a
2
01)1(2
222
a
a||b
=
++−== b
※バーガースベクトルの大きさは
以下のようにして計算する。
10
FCC結晶構造において(111)面の積み重
ねを見ると、最密重点面のくぼみに上
の最密重点面の原子がおさまるように
なっており、その積み重ねの順番は
(111)面に垂直な方向、すなわち[111]
方向に
⋯⋯ BCABCABCABCA
となっている。
転位が移動した後、すべり面に
沿って、すべり面より下の結晶の原
子の位置に対して上の結晶の位置はb
だけずれる。bが隣接原子間の距離を
表すベクトルであるならば、このず
れが起こっても結晶の周期性は保た
れる。この場合を完全転位という。
AB
C
]101[2
a=b
面)111(
1 2
方向]121[
]101[2
a=bA
B
C
A
C
方向]111[
面)111(
1 2
]101[2
a=b
BB →
b1 2
]112[6
1
a=b
CB →
b1
1
3
]121[6
2
a=b
AC →
b2
2
3
完全転位が、運動した場合、例えばすべ
り面Aに対してその上のすべり面Bの原
子をbだけ移動させる。このときB原子の
移動を見ると、経路1→2のようにA原子
の上を乗っかっていくことになり、その
分の高いエネルギーが必要となる。
次に、(1)原子Bが経路
1→3のように下の原子Aの谷
間を通ってそのくぼみ3に落
ち着くプロセスと、(2)原
子Bが経路3→2のようにくぼ
み3から同じく下の原子Aの
谷間を通ってそのくぼみ2に
落ち着くプロセスを考える。
21 b+bb→ ]121[6
]112[6
]101[2
aaa+→
b1b2A
BC
このように、下の原子の山を越えるよりはそれらの谷間を通る方が、移動
のエネルギーは小さい。なので、FCC中の完全転位は谷間を取る経路をと
る二つの部分転位(ショックレーの部分転位)に分かれる性質がある。
あるいは
これらの部分転位による原子の移動では、結晶の周期性が満足されないた
め、不完全転位と呼ばれる。また、部分転位の間は、下の図に表したよう
に、本来ABの積み重ねになるところがACとなっており、FCC結晶構造に
はない原子の積み重ね(積層欠陥)となる。
w
面)111(
完全転位の弾性エネルギーと、二つの
ショックレー部分転位に分かれた時の弾
性エネルギーを比較する。
2
2GbUe ≈完全転位:
二つの部分転位:
3)6/(cos
)2/(
22
2
2
22
2
2
1 GbbGGbGbUe ==+≈′
π
2/)6/cos()6/cos( 21 bbb == ππ より
b
1b 2b
6/π 6/π
FCC中の完全転位は、二つのショックレー部分転位に分かれた方が、
Gb2/6程度だけエネルギー的に安定になる。一方、部分転位間には
FCC結晶構造にはない積層不整が発生したのでその分エネルギーが
高くなる。よってエネルギー的には以下の釣り合いが幅wの部分転位
への分解に必要となる。
wGbGbGb
SFγ++=222
2
2
2
1
2
(単位面積あたり)
積層欠陥エネルギー;SFγ
11
方向]111[
面)111(
C
A
C
B
A
b1 b2
B
B
B
A
A
C
C
A
C
A
面)0001(
結晶構造HCP
⋯⋯ CABCABC|ABCABCA
1FCC 2FCC
HCP
ショックレー部分転位間の(111)面の積み重ね
を見ると、せん断変位が起こった面を境にし
てFCC構造の連続性がなくなっている(FCC1
とFCC2)。あるいは、その領域においてHCP構
造の最密充填面の積層(ACAC)となっている。方向]111[
面)111(
A
A
B
C
C
C
B
C
A
双晶面
双晶
⋯⋯ CABCABC|ABCABCA
双晶1
双晶2
右の図のように、原子面を境にして原
子の位置関係が鏡像となっているとき、
これを双晶の関係にあると言い、その
境界面を双晶面と言う。
FCC中の部分転位(拡張転位ともいう)
に挟まれた領域での(111)面の積層を見
ると、CACの双晶1とACAの双晶2が隣
接してるとみなしても良い。
2SF
twin
γγ ≈
積層欠陥中には2枚の双晶面が含
まれているとみなせるので、双
晶面のエネルギーをγtwinとすると、
以下の関係が導かれる。
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
Cu-Al
Cu-Zn
固溶原子濃度(原子分率)
0.008
w/b**
7.5
26
29
0.022Ag
0.161
25
8.8
66
0.322Pt
0.0430.125Ni
0.0150.045Au
0.0240.078Cu
0.0750.166Al
γtwin*
(J/m2)
γSF*
(J/m2)
積層欠陥エネルギー
γSF(
J/m
2)
アルミ青銅
α黄銅
積層欠陥エネルギーは固溶により著しく減少する!
*L. R. Murr, Interfacial
Phenomena in Metals and Alloys
(Addison-Wisley)
で概算した幅SF
Gbw
γ6**
2
≈α黄銅で発達した焼きなまし双晶
双晶境界のエネルギー2
J/m008.0=twinγ
粒界のエネルギー
twintwingb γγγ 100~10=
積層欠陥エネルギーが小さい
金属では焼きなましの熱処理
によって、双晶境界が発達し
やすい(焼きなまし双晶)。
双晶境界が発達する方がエネルギー的に低い。
12
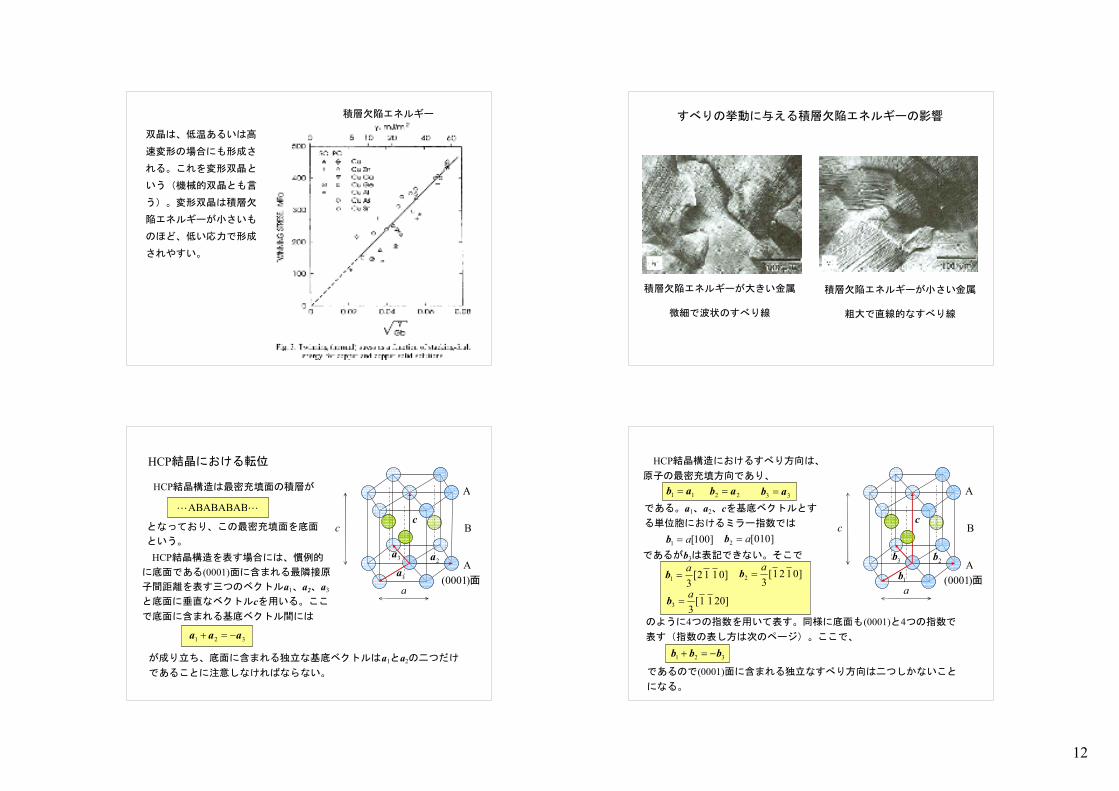
双晶は、低温あるいは高
速変形の場合にも形成さ
れる。これを変形双晶と
いう(機械的双晶とも言
う)。変形双晶は積層欠
陥エネルギーが小さいも
のほど、低い応力で形成
されやすい。
積層欠陥エネルギー すべりの挙動に与える積層欠陥エネルギーの影響
積層欠陥エネルギーが大きい金属
微細で波状のすべり線
積層欠陥エネルギーが小さい金属
粗大で直線的なすべり線
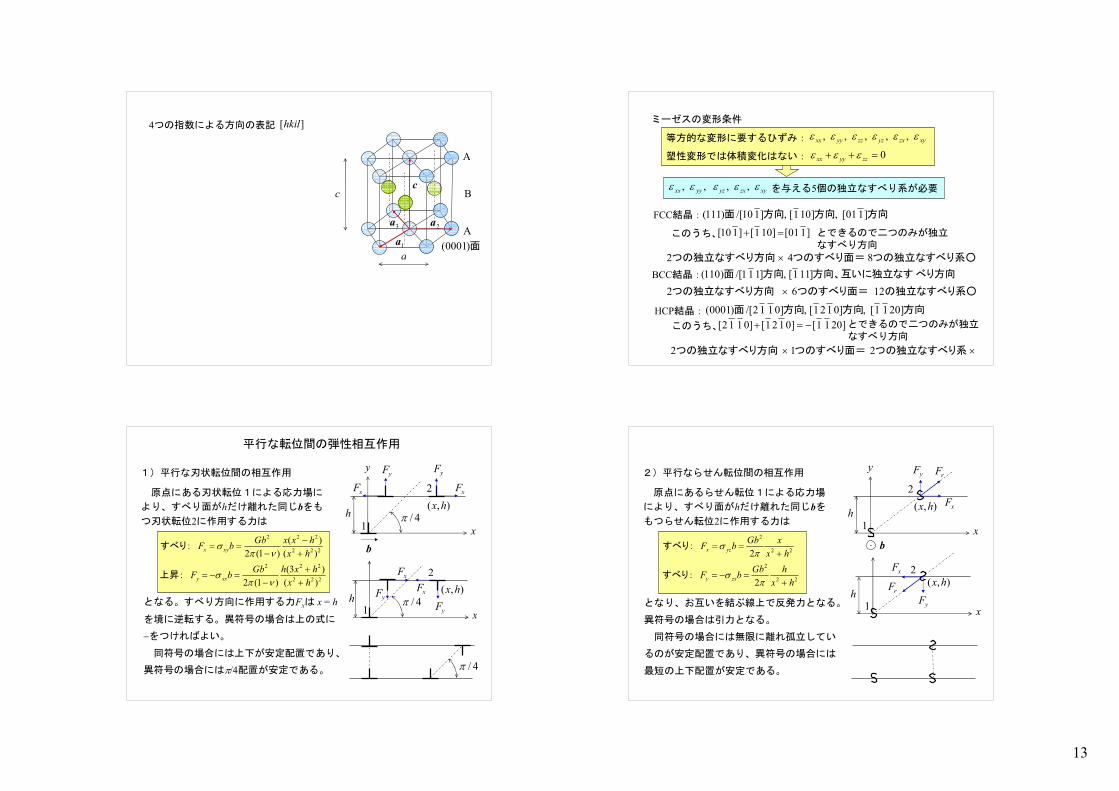
HCP結晶における転位
A
B
A
面)0001(
c
a
1a
2a3a
c
HCP結晶構造を表す場合には、慣例的
に底面である(0001)面に含まれる最隣接原
子間距離を表す三つのベクトルa1、a2、a3
と底面に垂直なベクトルcを用いる。ここ
で底面に含まれる基底ベクトル間には
HCP結晶構造は最密充填面の積層が
⋯⋯ABABABAB
となっており、この最密充填面を底面
という。
321 aaa −=+
が成り立ち、底面に含まれる独立な基底ベクトルはa1とa2の二つだけ
であることに注意しなければならない。
HCP結晶構造におけるすべり方向は、
原子の最密充填方向であり、
11 ab =
である。a1、a2、cを基底ベクトルとす
る単位胞におけるミラー指数では
]100[1 a=b ]010[2 a=b
であるがb3は表記できない。そこで
22 ab =33 ab =
A
B
A
面)0001(
c
a1b
2b3b
c
]0112[3
1
a=b ]0121[
32
a=b
]2011[3
3
a=b
のように4つの指数を用いて表す。同様に底面も(0001)と4つの指数で
表す(指数の表し方は次のページ)。ここで、
321 bbb −=+
であるので(0001)面に含まれる独立なすべり方向は二つしかないこと
になる。
13
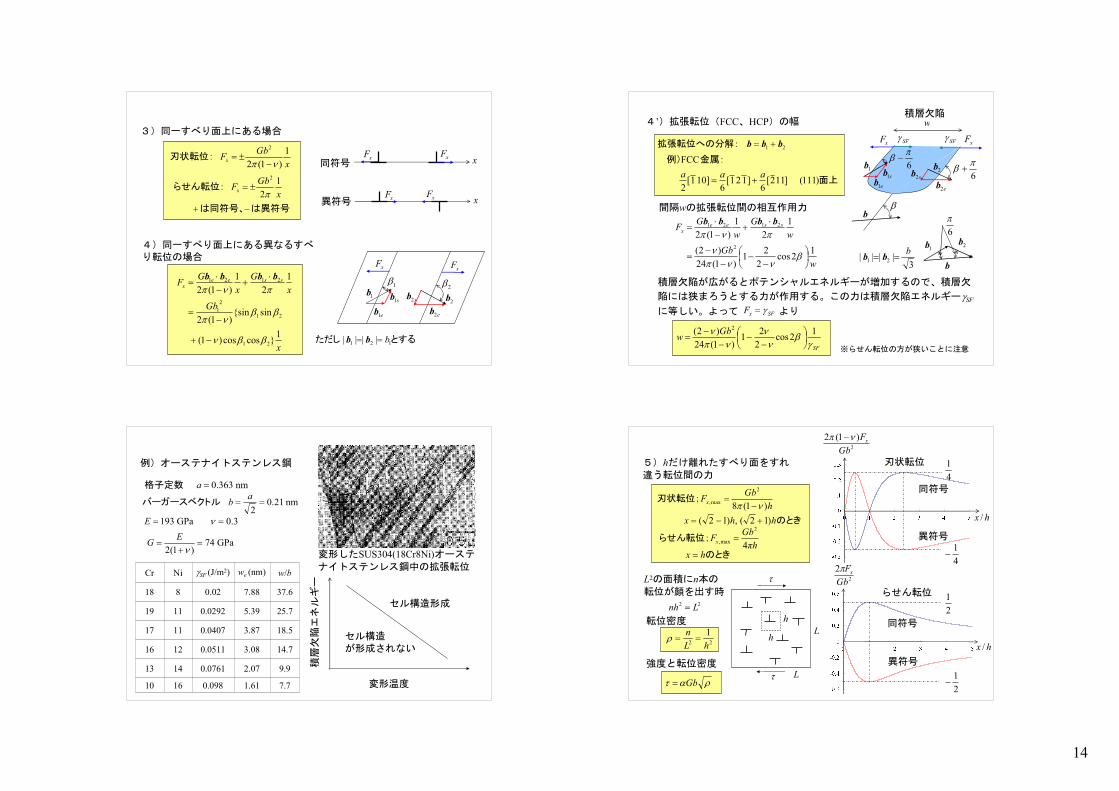
][hkil4つの指数による方向の表記
A
B
A
面)0001(
c
a1a
2a3a
c
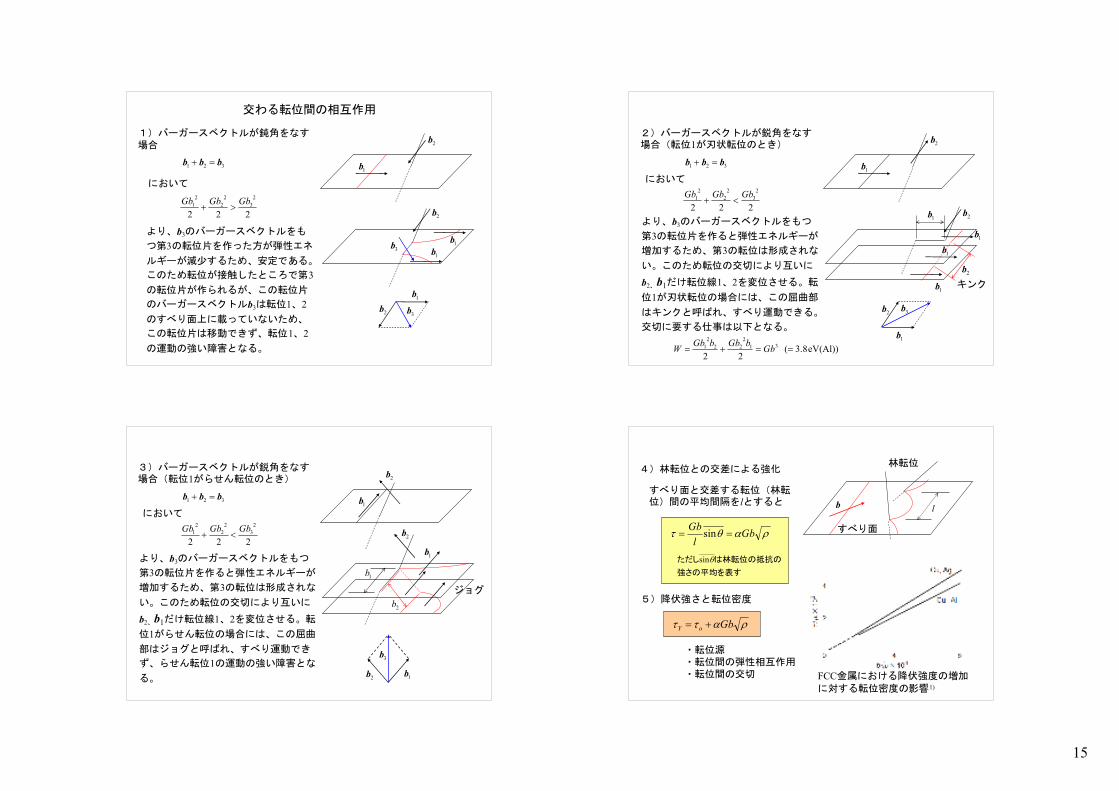
ミーゼスの変形条件
等方的な変形に要するひずみ: xyzxyzzzyyxx εεεεεε ,,,,,
塑性変形では体積変化はない: 0=++ zzyyxx εεε
を与える5個の独立なすべり系が必要xyzxyzyyxx εεεεε ,,,,
FCC結晶: 方向方向方向面 ]101[,]101[,]110/[)111(
このうち、 ]101[]101[]110[ =+ とできるので二つのみが独立なすべり方向
つの独立なすべり系○つのすべり面=つの独立なすべり方向 842 ×
BCC結晶: べり方向方向、互いに独立なす方向面 ]111[,]111/[)110(
の独立なすべり系○つのすべり面=つの独立なすべり方向 1262 ×
HCP結晶: 方向方向方向面 ]2011[,]0121[,]0112/[)0001(
このうち、 ]2011[]0121[]0112[ −=+ とできるので二つのみが独立なすべり方向
×× つの独立なすべり系つのすべり面=つの独立なすべり方向 212
平行な転位間の弾性相互作用
1)平行な刃状転位間の相互作用
原点にある刃状転位1による応力場に
より、すべり面がhだけ離れた同じbをも
つ刃状転位2に作用する力は
222
222
)(
)(
)1(2 hx
hxxGbbF xyx +
−−
==νπ
σすべり:
222
222
)(
)3(
)1(2 hx
hxhGbbF xxy +
+−
=−=νπ
σ上昇:
x
y
1
2
),( hx
xF
yF
b
xF
yF
4/π
x1
2
),( hxxF
yF
xF
yF4/πとなる。すべり方向に作用する力Fxは x = h
を境に逆転する。異符号の場合は上の式に
−をつければよい。
同符号の場合には上下が安定配置であり、
異符号の場合にはπ/4配置が安定である。 4/π
h
h
2)平行ならせん転位間の相互作用
原点にあるらせん転位1による応力場
により、すべり面がhだけ離れた同じbを
もつらせん転位2に作用する力は
22
2
2 hx
xGbbF yzx +
==π
σすべり:
22
2
2 hx
hGbbF zxy +
=−=π
σすべり:
となり、お互いを結ぶ線上で反発力となる。
異符号の場合は引力となる。
同符号の場合には無限に離れ孤立してい
るのが安定配置であり、異符号の場合には
最短の上下配置が安定である。
x
y
1
2
),( hx xF
yFrF
h
x1
2),( hx
xF
yFrF
h
b
14
3)同一すべり面上にある場合
x
GbFx
1
)1(2
2
νπ −±=刃状転位:
x
GbFx
1
2
2
π±=らせん転位:
xxF
xF xF
xF
xは異符号は同符号、−+
1b2b
e1b e2b
s2bs1b
xFxF
4)同一すべり面上にある異なるすべり転位の場合
x
Gb
x
G
x
GF ssee
x
1}coscos)1(
sin{sin)1(2
1
2
1
)1(2
21
21
2
1
2121
ββν
ββνπ
πνπ
−+
−=
⋅+
−⋅
=bbbb
2β1β
とするただし 121 |||| b== bb
同符号
異符号
4’)拡張転位(FCC、HCP)の幅
w
Gb
w
G
w
GF ssee
x
12cos
2
21
)1(24
)2(
1
2
1
)1(2
2
2121
−
−−
−=
⋅+
−⋅
=
βννπ
ν
πνπbbbb
間隔wの拡張転位間の相互作用力
21 bbb +=拡張転位への分解:
面上
金属:例)
)111(]112[6
]121[6
]101[2
FCC
aaa+=
e1be2b
s2bs1b
xF xF
b
β
6
πβ −
6
πβ +1b 2b
SFγ SFγ
積層欠陥w
積層欠陥が広がるとポテンシャルエネルギーが増加するので、積層欠
陥には狭まろうとする力が作用する。この力は積層欠陥エネルギーγSF
に等しい。よって より
SF
Gbw
γβ
νν
νπν 1
2cos2
21
)1(24
)2(2
−
−−
−=
SFxF γ=
b
1b 2b
6
π
※らせん転位の方が狭いことに注意
3|||| 21
b== bb
変形温度
セル構造形成
積層欠陥エネルギー
セル構造が形成されない
変形したSUS304(18Cr8Ni)オーステ
ナイトステンレス鋼中の拡張転位
例)オーステナイトステンレス鋼
nm363.0=a格子定数
nm21.02
==a
bバーガースベクトル
3.0GPa193 == νE
GPa74)1(2
=+
=ν
EG
Cr Ni γSF (J/m2) we (nm) w/b
18 8 0.02 7.88 37.6
19 11 0.0292 5.39 25.7
17 11 0.0407 3.87 18.5
16 12 0.0511 3.08 14.7
13 14 0.0761 2.07 9.9
10 16 0.098 1.61 7.7
2
)1(2
Gb
Fxνπ −
h
GbFx
)1(8
2
max, νπ −=刃状転位;
hx /
2
2
Gb
Fxπ
hx /
5)hだけ離れたすべり面をすれ違う転位間の力
πh
GbFx
4
2
max, =らせん転位;
4
1
4
1−
2
1−
2
1
同符号
同符号
異符号
異符号
のときhhx )12(,)12( +−=
のときhx =
刃状転位
らせん転位
h
h
L
L
L2の面積にn本の
転位が顔を出す時22 Lnh =
22
1
hL
n==ρ
転位密度
τ
τρατ Gb=
強度と転位密度
15
交わる転位間の相互作用
1b
2b
321 bbb =+
222
2
3
2
2
2
1 GbGbGb>+
1b
2b
1b3b
3b
1b
2b
1)バーガースベクトルが鈍角をなす場合
において
より、b3のバーガースベクトルをも
つ第3の転位片を作った方が弾性エネ
ルギーが減少するため、安定である。
このため転位が接触したところで第3
の転位片が作られるが、この転位片
のバーガースベクトルb3は転位1、2
のすべり面上に載っていないため、
この転位片は移動できず、転位1、2
の運動の強い障害となる。
1b
2b
321 bbb =+
222
2
3
2
2
2
1 GbGbGb<+
1b
2b
3b
1b
2b
2)バーガースベクトルが鋭角をなす場合(転位1が刃状転位のとき)
において
より、b3のバーガースベクトルをもつ
第3の転位片を作ると弾性エネルギーが
増加するため、第3の転位は形成されな
い。このため転位の交切により互いに
b2、b1だけ転位線1、2を変位させる。転
位1が刃状転位の場合には、この屈曲部
はキンクと呼ばれ、すべり運動できる。
交切に要する仕事は以下となる。
1b
1b
キンク
1b
2b
eV(Al))8.3(22
31
2
22
2
1 ==+= GbbGbbGb
W
1b
2b
321 bbb =+
222
2
3
2
2
2
1 GbGbGb<+
3b
1b2b
3)バーガースベクトルが鋭角をなす場合(転位1がらせん転位のとき)
において
より、b3のバーガースベクトルをもつ
第3の転位片を作ると弾性エネルギーが
増加するため、第3の転位は形成されな
い。このため転位の交切により互いに
b2、b1だけ転位線1、2を変位させる。転
位1がらせん転位の場合には、この屈曲
部はジョグと呼ばれ、すべり運動でき
ず、らせん転位1の運動の強い障害とな
る。
ジョグ
2b
1b
1b
2b
lb
すべり面
林転位4)林転位との交差による強化
ραθτ Gbl
Gb== sin
すべり面と交差する転位(林転位)間の平均間隔をlとすると
強さの平均を表す
は林転位の抵抗のただし θsin
5)降伏強さと転位密度
ραττ GboY +=
FCC金属における降伏強度の増加
に対する転位密度の影響1)
・転位源・転位間の弾性相互作用・転位間の交切
16
転位と固溶原子との相互作用
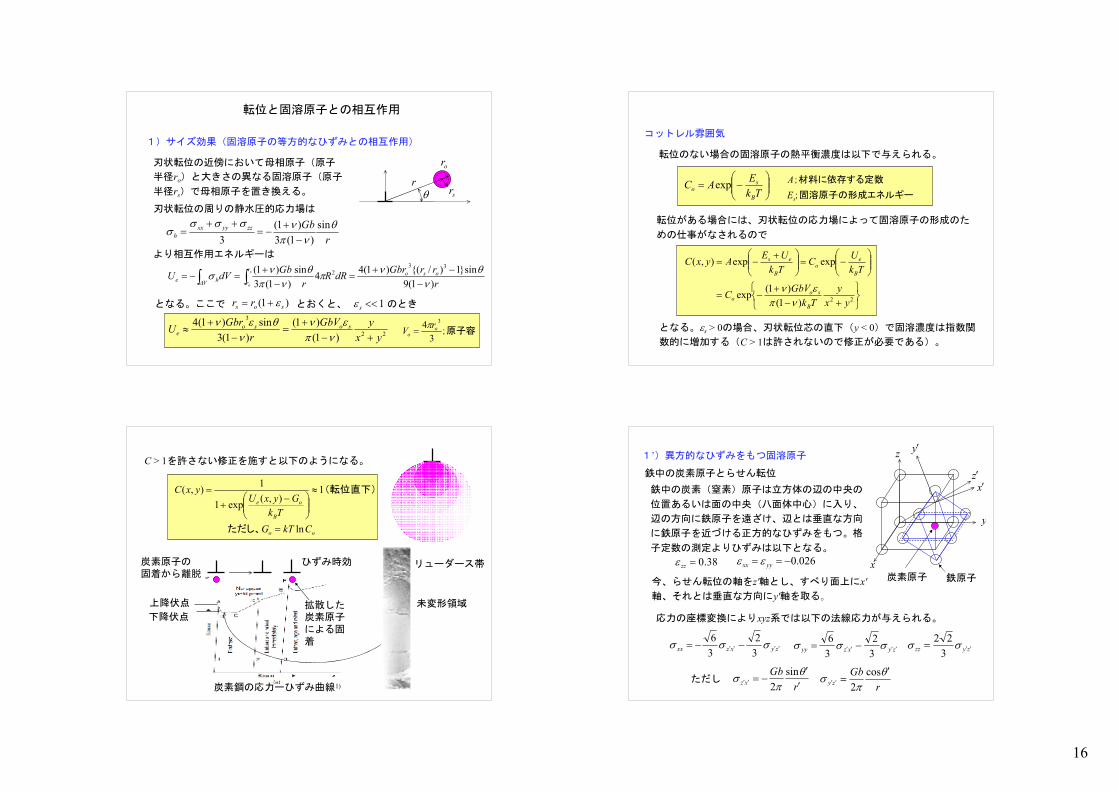
1)サイズ効果(固溶原子の等方的なひずみとの相互作用)
刃状転位の近傍において母相原子(原子
半径ro)と大きさの異なる固溶原子(原子
半径rs)で母相原子を置き換える。
r
Gbzzyyxx
h
θνπ
νσσσσ
sin
)1(3
)1(
3 −+
−=++
=
刃状転位の周りの静水圧的応力場は
より相互作用エネルギーは
r
rrGbrdRR
r
GbdVU oso
r
rVhe
s
o )1(9
sin}1)/{()1(44
sin
)1(3
)1( 33
2
νθν
πθ
νπν
σ∆ −
−+=
−+
=−= ∫∫
)1( sos rr ε+=となる。ここで とおくと、 のとき
22
3
)1(
)1(
)1(3
sin)1(4
yx
yGbV
r
GbrU soso
e +−+
=−
+≈
νπεν
νθεν
1<<sε
;原子容3
43
oo
rV
π=
or
srr
θ
コットレル雰囲気
転位のない場合の固溶原子の熱平衡濃度は以下で与えられる。
−=
Tk
EAC
B
so exp
ルギー;固溶原子の形成エネ
;材料に依存する定数
sE
A
転位がある場合には、刃状転位の応力場によって固溶原子の形成のた
めの仕事がなされるので
+−+
−=
−=
+−=
22)1(
)1(exp
expexp),(
yx
y
Tk
GbVC
Tk
UC
Tk
UEAyxC
B
soo
B
eo
B
es
νπεν
となる。εs > 0の場合、刃状転位芯の直下(y < 0)で固溶濃度は指数関
数的に増加する(C > 1は許されないので修正が必要である)。
(転位直下)1),(
exp1
1),( ≈
−+
=
Tk
GyxUyxC
B
oe
oo CkTG ln=ただし、
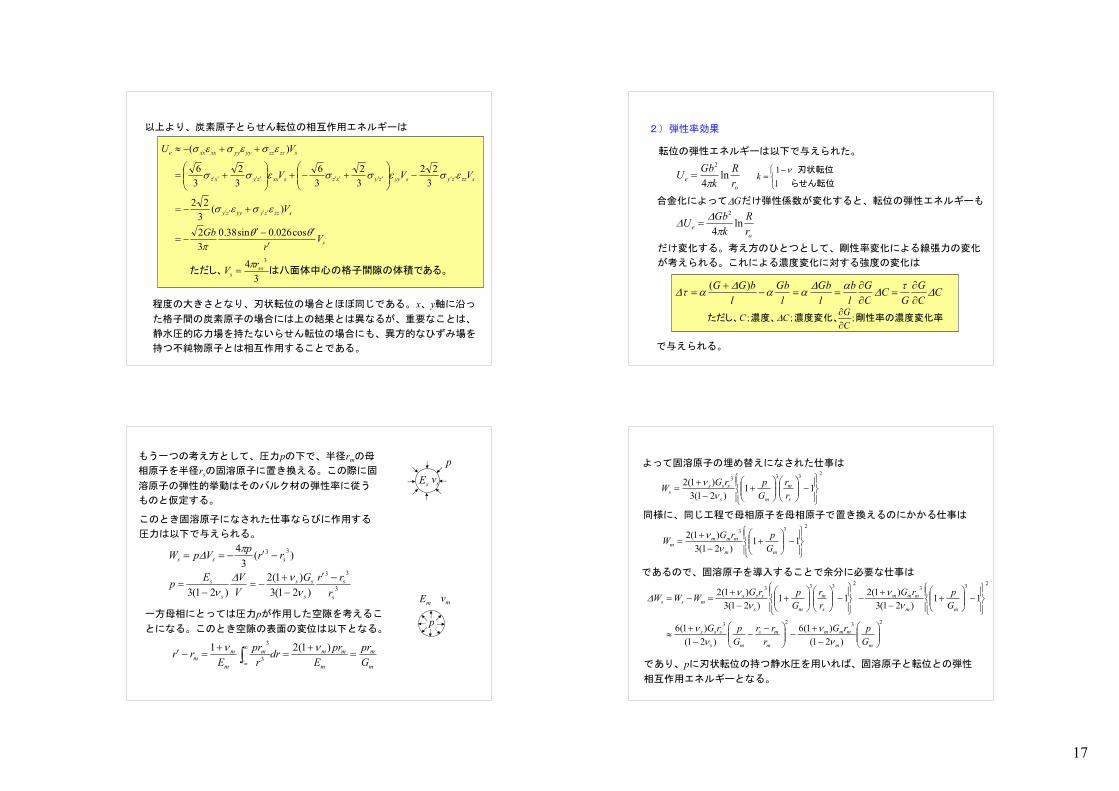
C > 1を許さない修正を施すと以下のようになる。
上降伏点
下降伏点
炭素原子の固着から離脱
ひずみ時効
拡散した炭素原子による固着
リューダース帯
炭素鋼の応力ーひずみ曲線1)
未変形領域
38.0=zzε
鉄中の炭素(窒素)原子は立方体の辺の中央の
位置あるいは面の中央(八面体中心)に入り、
辺の方向に鉄原子を遠ざけ、辺とは垂直な方向
に鉄原子を近づける正方的なひずみをもつ。格
子定数の測定よりひずみは以下となる。
026.0−== yyxx εε
鉄中の炭素原子とらせん転位
今、らせん転位の軸をz'軸とし、すべり面上にx'
軸、それとは垂直な方向にy'軸を取る。
応力の座標変換によりxyz系では以下の法線応力が与えられる。
zyxzxx ′′′′ −−= σσσ3
2
3
6zyxzyy ′′′′ −= σσσ
3
2
3
6zyzz ′′= σσ
3
22
r
Gbxz ′
′−=′′
θπ
σsin
2 r
Gbzy
θπ
σ′
=′′
cos
2ただし
x
y
z
z′x′
y′
炭素原子 鉄原子
1’)異方的なひずみをもつ固溶原子
17
以上より、炭素原子とらせん転位の相互作用エネルギーは
s
szzzyyyzy
szzzysyyzyxzsxxzyxz
szzzzyyyyxxxxe
Vr
Gb
V
VVV
VU
′′−′
−=
+−=
−
+−+
+=
++−≈
′′′′
′′′′′′′′′′
θθπ
εσεσ
εσεσσεσσ
εσεσεσ
cos026.0sin38.0
3
2
)(3
22
3
22
3
2
3
6
3
2
3
6
)(
隙の体積である。は八面体中心の格子間ただし、3
43
sos
rV
π=
程度の大きさとなり、刃状転位の場合とほぼ同じである。x、y軸に沿っ
た格子間の炭素原子の場合には上の結果とは異なるが、重要なことは、
静水圧的応力場を持たないらせん転位の場合にも、異方的なひずみ場を
持つ不純物原子とは相互作用することである。
2)弾性率効果
o
er
R
k
GbU ln
4
2
π=
転位の弾性エネルギーは以下で与えられた。
−
= らせん転位
刃状転位
1
1 νk
o
er
R
k
GbU ln
4
2
π∆
∆ =
合金化によって∆Gだけ弾性係数が変化すると、転位の弾性エネルギーも
だけ変化する。考え方のひとつとして、剛性率変化による線張力の変化
が考えられる。これによる濃度変化に対する強度の変化は
CC
G
GC
C
G
l
b
l
Gb
l
Gb
l
bGG∆
τ∆
α∆αα
∆ατ∆
∂∂
=∂∂
==−+
=)(
;剛性率の濃度変化率;濃度変化、;濃度、ただし、C
GCC
∂∂
∆
で与えられる。
sE sv
mE mv
pもう一つの考え方として、圧力pの下で、半径rmの母
相原子を半径rsの固溶原子に置き換える。この際に固
溶原子の弾性的挙動はそのバルク材の弾性率に従う
ものと仮定する。
)(3
4 33
sss rrp
VpW −′−==π
∆
3
33
)21(3
)1(2
)21(3s
s
s
ss
s
s
r
rrG
V
VEp
−′
−+
−=−
=ν
ν∆ν
このとき固溶原子になされた仕事ならびに作用する
圧力は以下で与えられる。
一方母相にとっては圧力pが作用した空隙を考えるこ
とになる。このとき空隙の表面の変位は以下となる。p
m
m
m
mm
r
m
m
mm
G
pr
E
prdr
r
pr
Err
m
=+
=+
=−′ ∫∞ )1(21
3
3 νν
2333
11)21(3
)1(2
−
+
−+
=s
m
ms
ssss
r
r
G
prGW
νν
233
11)21(3
)1(2
−
+
−+
=mm
mmmm
G
prGW
νν
よって固溶原子の埋め替えになされた仕事は
同様に、同じ工程で母相原子を母相原子で置き換えるのにかかる仕事は
であるので、固溶原子を導入することで余分に必要な仕事は
2323
233
2333
)21(
)1(6
)21(
)1(6
11)21(3
)1(211
)21(3
)1(2
−+
−
−−
−+
≈
−
+
−+
−
−
+
−+
=−=
mm
mmm
m
ms
ms
sss
mm
mmm
s
m
ms
sssmss
G
prG
r
rr
G
prG
G
prG
r
r
G
prGWWW
νν
νν
νν
νν
∆
であり、pに刃状転位の持つ静水圧を用いれば、固溶原子と転位との弾性
相互作用エネルギーとなる。
18
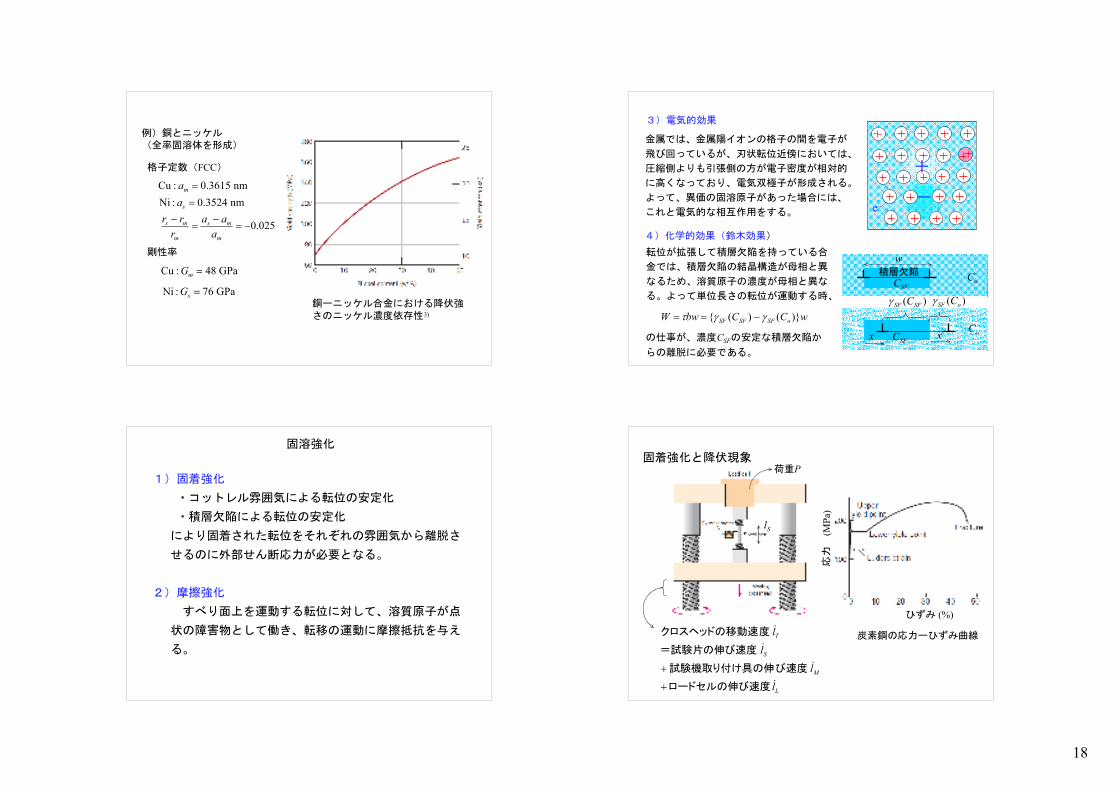
銅ーニッケル合金における降伏強さのニッケル濃度依存性3)
例)銅とニッケル(全率固溶体を形成)
nm3524.0:Ni =sa
nm3615.0:Cu =ma
格子定数(FCC)
025.0−=−
=−
m
ms
m
ms
a
aa
r
rr
GPa48:Cu =mG
剛性率
GPa76:Ni =sG
3)電気的効果
金属では、金属陽イオンの格子の間を電子が
飛び回っているが、刃状転位近傍においては、
圧縮側よりも引張側の方が電子密度が相対的
に高くなっており、電気双極子が形成される。
よって、異価の固溶原子があった場合には、
これと電気的な相互作用をする。
+−
e−
4)化学的効果(鈴木効果)
SFC oC
SFCoC
xx
転位が拡張して積層欠陥を持っている合
金では、積層欠陥の結晶構造が母相と異
なるため、溶質原子の濃度が母相と異な
る。よって単位長さの転位が運動する時、
wCCbwW oSFSFSF )}()({ γγτ −==
w
の仕事が、濃度CSFの安定な積層欠陥か
らの離脱に必要である。
)( oSF Cγ)( SFSF Cγ
積層欠陥
固溶強化
1)固着強化
・コットレル雰囲気による転位の安定化
・積層欠陥による転位の安定化
により固着された転位をそれぞれの雰囲気から離脱さ
せるのに外部せん断応力が必要となる。
2)摩擦強化
すべり面上を運動する転位に対して、溶質原子が点
状の障害物として働き、転移の運動に摩擦抵抗を与え
る。
固着強化と降伏現象
ひずみ (%)
応力
(MPa)
炭素鋼の応力ーひずみ曲線
L
M
S
T
l
l
l
l
ɺ
ɺ
ɺ
ɺ
ロードセルの伸び速度
び速度試験機取り付け具の伸
=試験片の伸び速度
度クロスヘッドの移動速
+
+
荷重P
Sl
19
S
M
TSMT
L
L lt
P
kllll
t
P
kl ɺɺɺɺɺɺ −
∂∂
−=−−=∂∂
=11
試験機の伸びは、ロードセルで測定される荷重に比例するので、
数;ロードセルのばね定
;試験機のばね定数
L
M
k
k
試験片が弾性変形しているときには、以下のようになる。
t
P
kt
P
kl
t
P
k SM
T
L ∂∂
−∂∂
−=∂∂ 111
ɺ ;試験片のばね定数Sk
TT lkt
Pɺ=
∂∂
SMLT kkkk
1111++= ;系全体のばね定数Tk
試験片が塑性変形し始めると、試験片の伸びは弾性変形と塑性変形によ
るものとなり、以下のように表される。
pS
S
plasticSelasticSSM
l
t
P
klll γɺɺɺɺ +
∂∂
=+=1
,,
ずみに変換する係数せん断ひずみを伸びひ
ひずみ速度塑性変形によるせん断
試験片の長さ;
;
;
M
l
p
S
γ
)( pCST
pS
TTM
lk
M
llk
t
Pγγγ ɺɺɺɺ −=
−=∂∂
従って、塑性変形が開始した以降の荷重の時間変化は以下のようになる。
ここで塑性変形による結晶のせん断ひずみ速度として以下を用いる。
bvp ργ =ɺ運動転位の平均速度
運動転位の密度
;
;
v
ρ
(一定) クロスヘッド速度
変換した;せん断ひずみ速度にCγɺ
転位はコットレル雰囲気で固着されているので、離脱できる応力が作
用する時間まで、運動転位密度は0である。すなわち
<
≤≤=
ttt
tt
c
c
),(
0,0
ρρ
ここでは塑性変形が進むと転位密度が定常値になることを加味して
ttttt c
n
co <−−−= }])(exp{1[)( αρρ
と置けるものと仮定する。
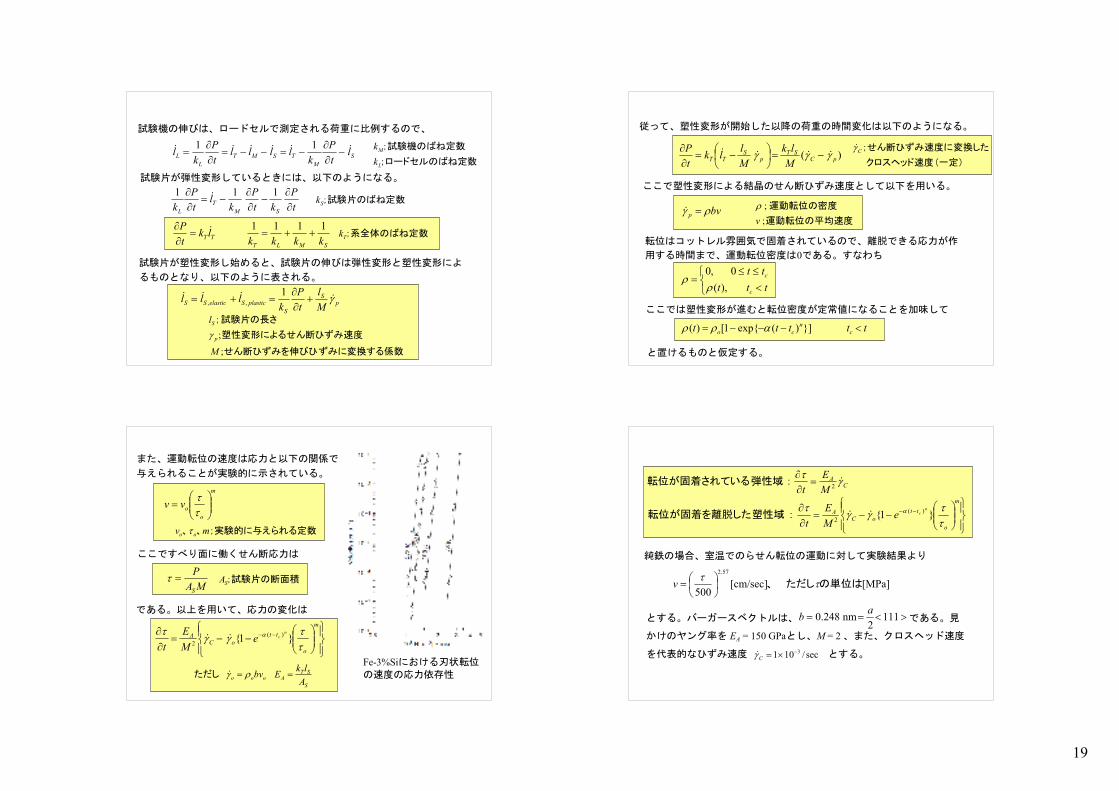
また、運動転位の速度は応力と以下の関係で
与えられることが実験的に示されている。
m
o
ovv
=
ττ
定数;実験的に与えられる、、 mv oo τ
Fe-3%Siにおける刃状転位
の速度の応力依存性
ここですべり面に働くせん断応力は
MA
P
S
=τ ;試験片の断面積SA
−−=
∂
∂ −−
m
o
tt
oCA
nce
M
E
t ττ
γγτ α
}1{)(
2ɺɺ
S
STAooo
A
lkEbv == ργɺただし
である。以上を用いて、応力の変化は
純鉄の場合、室温でのらせん転位の運動に対して実験結果より
[MPa][cm/sec]500
57.2
の単位はただし、 ττ
=v
とする。バーガースベクトルは、 である。見
かけのヤング率を EA = 150 GPaとし、M = 2 、また、クロスヘッド速度
を代表的なひずみ速度 とする。
><== 1112
nm248.0a
b
CA
M
E
tγ
τɺ
2=
∂∂:弾性域転位が固着されている
−−=
∂∂ −−
m
o
tt
oCA
nce
M
E
t ττ
γγτ α
}1{)(
2ɺɺ:塑性域転位が固着を離脱した
sec/101 3−×=Cγɺ
20
ひずみ ε (%)
応力 σ (MPa) 上降伏点
下降伏点
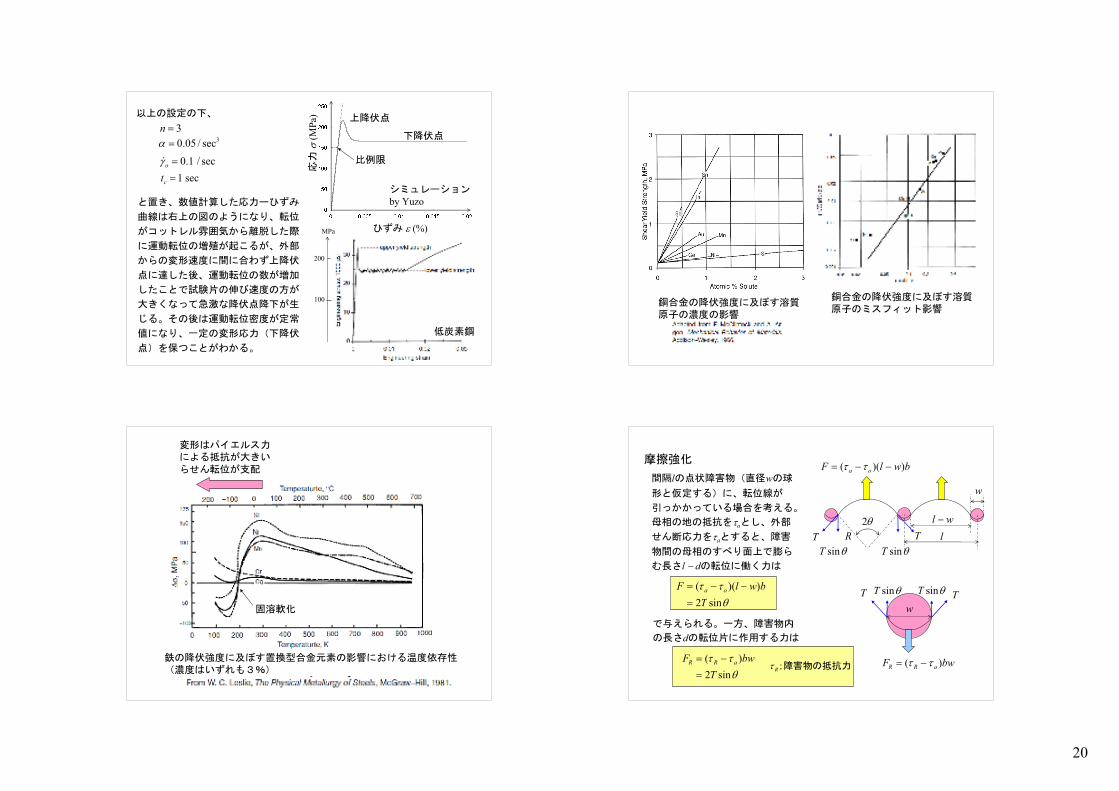
以上の設定の下、
3sec/05.0=α
sec/1.0=oγɺ
と置き、数値計算した応力ーひずみ
曲線は右上の図のようになり、転位
がコットレル雰囲気から離脱した際
に運動転位の増殖が起こるが、外部
からの変形速度に間に合わず上降伏
点に達した後、運動転位の数が増加
したことで試験片の伸び速度の方が
大きくなって急激な降伏点降下が生
じる。その後は運動転位密度が定常
値になり、一定の変形応力(下降伏
点)を保つことがわかる。
sec1=ct
比例限
低炭素鋼
シミュレーション
by Yuzo
3=n
100
200
MPa
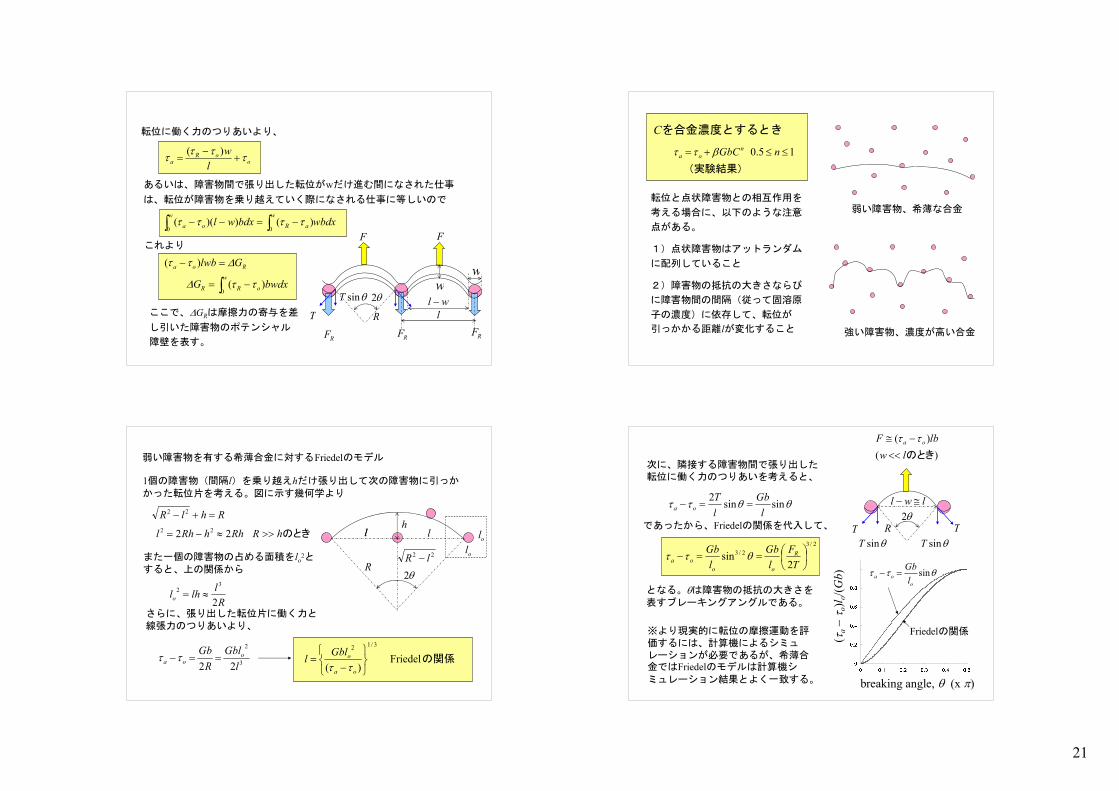
銅合金の降伏強度に及ぼす溶質原子の濃度の影響
銅合金の降伏強度に及ぼす溶質原子のミスフィット影響
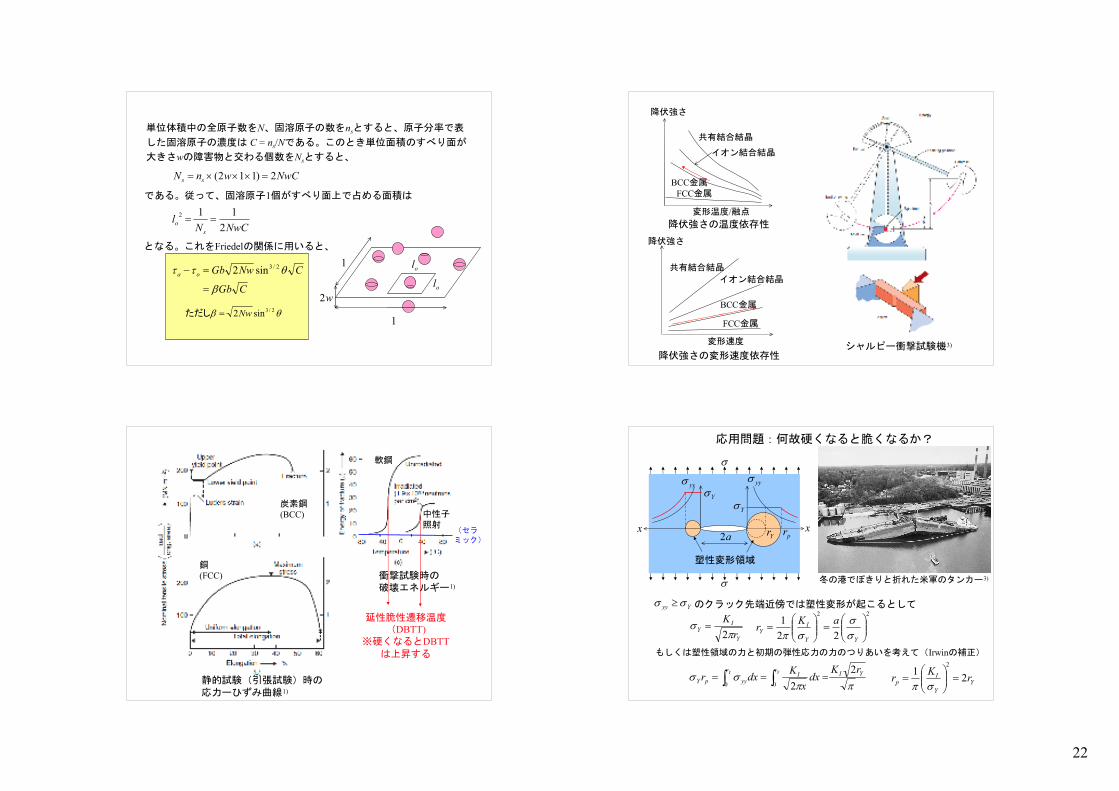
固溶軟化
鉄の降伏強度に及ぼす置換型合金元素の影響における温度依存性(濃度はいずれも3%)
変形はパイエルス力による抵抗が大きいらせん転位が支配
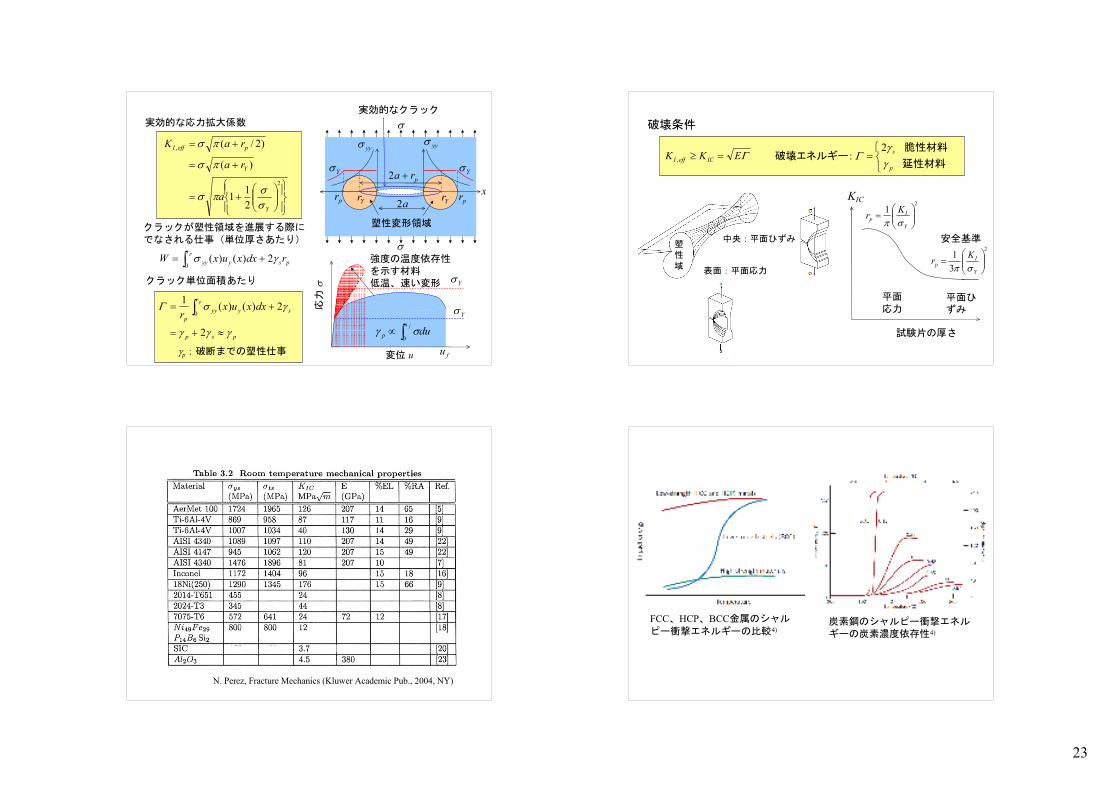
摩擦強化bwlF oa ))(( −−= ττ
l
w
wl −
R
θ2T
θsinT θsinT
T
T TθsinT θsinT
bwF aRR )( ττ −=
w
間隔lの点状障害物(直径wの球
形と仮定する)に、転位線が
引っかかっている場合を考える。
母相の地の抵抗をτoとし、外部
せん断応力をτaとすると、障害
物間の母相のすべり面上で膨ら
む長さl − dの転位に働く力は
θ
ττ
sin2
))((
T
bwlF oa
=
−−=
で与えられる。一方、障害物内
の長さdの転位片に作用する力は
θ
ττ
sin2
)(
T
bwF aRR
=
−=;障害物の抵抗力Rτ
21
転位に働く力のつりあいより、
ooR
al
wτ
τττ +
−=
)(
l
w
wl −R
θ2
T
θsinTw
F
RF
F
RFRF
wbdxbdxwlw
aR
w
oa ∫∫ −=−−00
)())(( ττττ
あるいは、障害物間で張り出した転位がwだけ進む間になされた仕事
は、転位が障害物を乗り越えていく際になされる仕事に等しいので
Roa Glwb ∆ττ =− )(
これより
∫ −=w
oRR bwdxG0
)( ττ∆
ここで、∆GRは摩擦力の寄与を差
し引いた障害物のポテンシャル
障壁を表す。
弱い障害物、希薄な合金
強い障害物、濃度が高い合金
転位と点状障害物との相互作用を
考える場合に、以下のような注意
点がある。
1)点状障害物はアットランダム
に配列していること
2)障害物の抵抗の大きさならび
に障害物間の間隔(従って固溶原
子の濃度)に依存して、転位が
引っかかる距離lが変化すること
(実験結果)
15.0 ≤≤+= nGbCn
oa βττ
Cを合金濃度とするとき
弱い障害物を有する希薄合金に対するFriedelのモデル
l l
Rθ2
h
22 lR −
RhlR =+− 22
のときhRRhhRhl >>≈−= 22 22 l
また一個の障害物の占める面積をlo2と
すると、上の関係から
R
llhlo
2
32 ≈=
ol
ol
3
2
22 l
Gbl
R
Gb ooa ==−ττ の関係Friedel
)(
3/12
−=
oa
oGbll
ττ
さらに、張り出した転位片に働く力と線張力のつりあいより、
1個の障害物(間隔l)を乗り越えhだけ張り出して次の障害物に引っか
かった転位片を考える。図に示す幾何学より
)(
)(
のときlw
lbF oa
<<
−≅ ττ
Rθ2
T
θsinT θsinT
T
lwl ≅−
次に、隣接する障害物間で張り出した転位に働く力のつりあいを考えると、
θθττ sinsin2
l
Gb
l
Toa ==−
であったから、Friedelの関係を代入して、
2/3
2/3
2sin
==−T
F
l
Gb
l
Gb R
oo
oa θττ
となる。θは障害物の抵抗の大きさを表すブレーキングアングルである。
breaking angle, θ (x π)
( τa −
τo)l
o/(
Gb)
Friedelの関係
θττ sino
oal
Gb=−
※より現実的に転位の摩擦運動を評価するには、計算機によるシミュレーションが必要であるが、希薄合金ではFriedelのモデルは計算機シ
ミュレーション結果とよく一致する。
22
単位体積中の全原子数をN、固溶原子の数をnsとすると、原子分率で表
した固溶原子の濃度は C = ns/Nである。このとき単位面積のすべり面が
大きさwの障害物と交わる個数をNsとすると、
NwCwnN ss 2)112( =×××=
である。従って、固溶原子1個がすべり面上で占める面積は
NwCNl
s
o2
112 ==
となる。これをFriedelの関係に用いると、
CGb
CNwGboa
β
θττ
=
=− 2/3sin2
θβ 2/3sin2Nw=ただし
1
1
w2ol
ol
降伏強さの温度依存性
降伏強さの変形速度依存性
FCC金属BCC金属
イオン結合結晶
共有結合結晶
降伏強さ
変形温度/融点
FCC金属
BCC金属
イオン結合結晶
共有結合結晶
降伏強さ
変形速度シャルピー衝撃試験機3)
炭素鋼(BCC)
銅(FCC)
軟鋼
中性子照射
衝撃試験時の破壊エネルギー1)
延性脆性遷移温度(DBTT)
※硬くなるとDBTT
は上昇する
(セラミック)
静的試験(引張試験)時の応力ーひずみ曲線1)
冬の港でぽきりと折れた米軍のタンカー3)
応用問題:何故硬くなると脆くなるか?
Y
IY
r
K
πσ
2=
ππσσ YI
rI
r
yypY
rKdx
x
Kdxr
YY 2
200 ∫∫ ===
22
22
1
=
=
YY
IY
aKr
σσ
σπ
yyσ
Yσ
yyσYσ
x x
塑性変形領域
a2 prYr
σ
σ
Y
Y
Ip r
Kr 2
12
=
=
σπ
もしくは塑性領域の力と初期の弾性応力の力のつりあいを考えて(Irwinの補正)
Yyy σσ ≥ のクラック先端近傍では塑性変形が起こるとして
23
yyσ
Yσ
yyσ
Yσ
x
塑性変形領域
a2 pr
σ
σ
pr
実効的なクラック
pra +2
+=
+=
+=
2
,
2
11
)(
)2/(
Y
Y
peffI
a
ra
raK
σσ
πσ
πσ
πσ
実効的な応力拡大係数
Yr Yr
Yσ
Yσ
強度の温度依存性を示す材料低温、速い変形
変位 u
応力
σ
ps
r
yyy rdxxuxWp
γσ 2)()(0
+= ∫
クラックが塑性領域を進展する際にでなされる仕事(単位厚さあたり)
psp
s
r
yyy
p
p
dxxuxr
γγγ
γσΓ
≈+=
+= ∫2
2)()(1
0
∫∝fu
p du0
σγ
fu
クラック単位面積あたり
γp;破断までの塑性仕事
ΓEKK ICeffI =≥,
破壊条件
=延性材料
脆性材料破壊エネルギー:
p
s
γ
γΓ
2
表面:平面応力
中央:平面ひずみ 塑性域
KIC
試験片の厚さ
平面応力
平面ひずみ
安全基準
2
1
=
Y
Ip
Kr
σπ
2
3
1
=
Y
Ip
Kr
σπ
N. Perez, Fracture Mechanics (Kluwer Academic Pub., 2004, NY)
FCC、HCP、BCC金属のシャル
ピー衝撃エネルギーの比較4)炭素鋼のシャルピー衝撃エネルギーの炭素濃度依存性4)
24
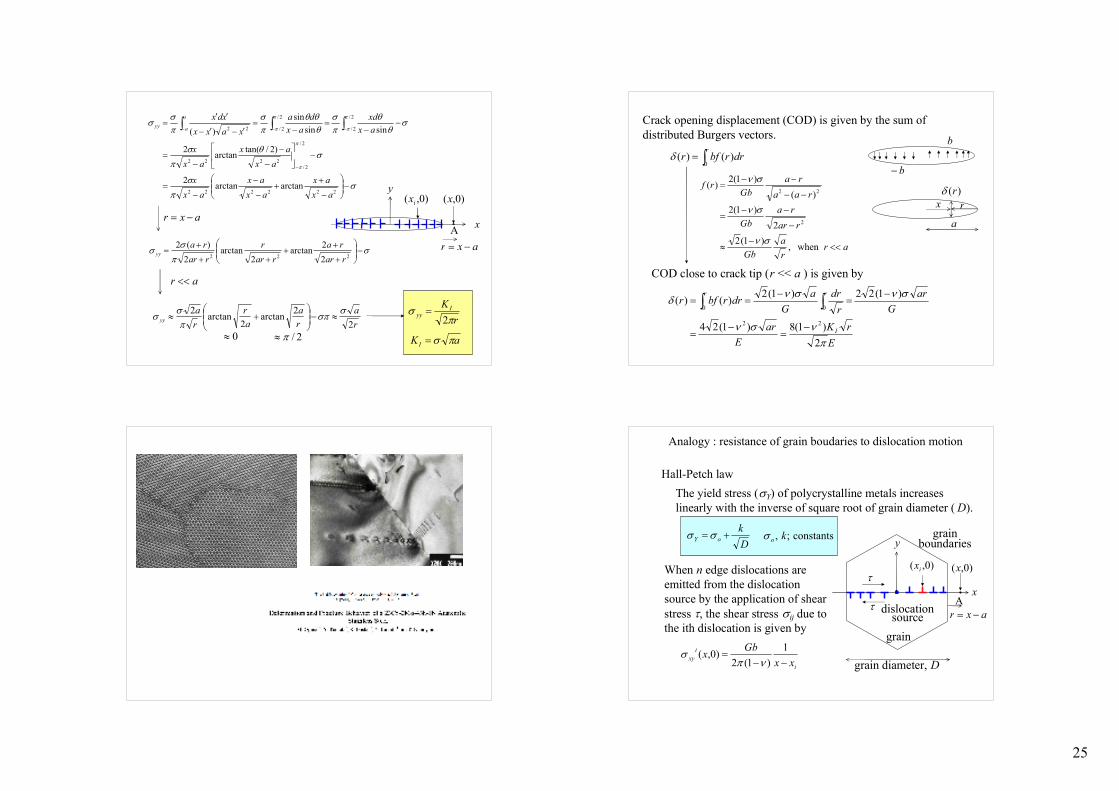
Crack : dislocation model
Equivalent
Edge dislocation array
mode I crack x
y
i
i
yyxx
Gbx
−−=
1
)1(2)0,(
νπσ
)0,( ix )0,(x
The normal stress σyy at point A due to the ith dislocation
A
∑∑−=−= −−
==2/
2/
2/
2/ )1(2)0,(
n
ni i
in
ni
i
yyyyxx
bGx
νπσσ
When n dislocations are involved in the array, the normal stress becomes
Assuming that dislocations are continuously distributed, the number
of dislocation existing from x to x + dx is given by
dxxfxn )()( = f(x) : the density of dislocations
σ
σ
a2 a2
∫=a
dxxfn0
)(2
0)(
)1(2
2
=+′−
′′
−= ∫−
bxx
xdxfGbb
a
ayy σ
νπσ ax <||
∫∑ −−= ′−
′′
−=
−−=
a
a
n
ni i
iyy
xx
xdxfGb
xx
bG )(
)1(2)1(2
2/
2/ νπνπσ
The total number of dislocations is given by
The normal stress due to the dislocations is rewritten as
It should be noted that )()( xfxf −−=
The equilibrium of forces acting the dislocation at ( x, 0) in the array
is given by
The normal stress by
the other dislocations
remote
stress
22
)1(2)(
xa
x
Gbxf
−
−=
σν
The function of dislocation density which satisfies the above
conditions is given by
Gb
adx
xa
x
Gbn
a σνσν )1(4)1(4
0 22
−=
−
−= ∫
The number of dislocations is given by
The normal stress in front of the crack tip becomes
∫− ′−′−
′′=
a
ayy
xaxx
xdx
22)(πσ
σ ax >
25
σπ
σ
σθ
π
σ
σθ
θπσ
θθθ
πσ
πσ
σ
π
π
π
π
π
π
−
−
++
−
−
−=
−
−
−
−=
−−
=−
=′−′−
′′=
−
−−− ∫∫∫
222222
2/
2/
2222
2/
2/
2/
2/22
arctanarctan2
)2/tan(arctan
2
sinsin
sin
)(
ax
ax
ax
ax
ax
x
ax
ax
ax
x
ax
xd
ax
da
xaxx
xdxa
ayy
x
y)0,( ix )0,(x
A
axr −=
axr −=
σπ
σσ −
+
++
++
+=
222 2
2arctan
2arctan
2
)(2
rar
ra
rar
r
rar
rayy
ar <<
r
a
r
a
a
r
r
ayy
2
2arctan
2arctan
2 σσπ
πσ
σ ≈−
+≈
0≈ 2/π≈ aK I πσ=
r
K Iyy π
σ2
=
Crack opening displacement (COD) is given by the sum of
distributed Burgers vectors.
∫=r
drrbfr0
)()(δ
)(rδx r
a
arr
a
Gb
rar
ra
Gb
raa
ra
Gbrf
<<−
≈
−
−−=
−−
−−=
when,)1(2
2
)1(2
)(
)1(2)(
2
22
σν
σν
σν
E
rK
E
ar
G
ar
r
dr
G
adrrbfr
I
rr
πνσν
σνσνδ
2
)1(8)1(24
)1(22)1(2)()(
22
00
−=
−=
−=
−== ∫∫
COD close to crack tip (r << a ) is given by
b
b−
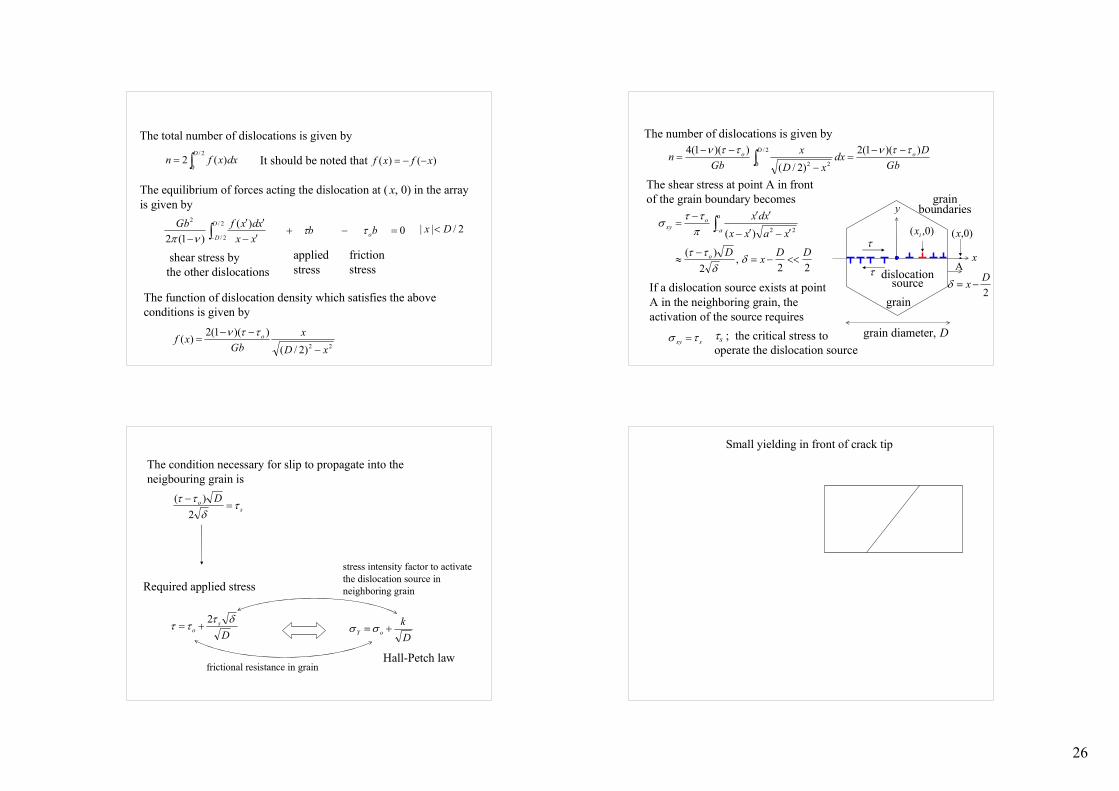
Analogy : resistance of grain boudaries to dislocation motion
Hall-Petch law
D
koY += σσ
The yield stress (σY) of polycrystalline metals increases
linearly with the inverse of square root of grain diameter ( D).
dislocation source
x
y
)0,( ix )0,(x
A
axr −=
i
i
xyxx
Gbx
−−=
1
)1(2)0,(
νπσ
When n edge dislocations are
emitted from the dislocation
source by the application of shear
stress τ, the shear stress σij due to
the ith dislocation is given bygrain
grain boundaries
grain diameter, D
τ
τ
constants;, koσ
26
∫=2/
0)(2
D
dxxfn
The total number of dislocations is given by
It should be noted that )()( xfxf −−=
0)(
)1(2
2/
2/
2
=−+′−
′′
− ∫−bb
xx
xdxfGbo
D
Dττ
νπ2/|| Dx <
The equilibrium of forces acting the dislocation at ( x, 0) in the array
is given by
shear stress by
the other dislocations
applied
stress
friction
stress
22)2/(
))(1(2)(
xD
x
Gbxf o
−
−−=
ττν
The function of dislocation density which satisfies the above
conditions is given by
Gb
Ddx
xD
x
Gbn o
Do ))(1(2
)2/(
))(1(4 2/
0 22
ττνττν −−=
−
−−= ∫
The number of dislocations is given by
dislocation source
x
y
)0,( ix )0,(x
A
2
Dx −=δ
grain
grain boundaries
grain diameter, D
τ
τ22,
2
)(
)( 22
DDx
D
xaxx
xdx
o
a
a
oxy
<<−=−
≈
′−′−
′′−= ∫−
δδ
ττ
πττ
σ
The shear stress at point A in front
of the grain boundary becomes
If a dislocation source exists at point
A in the neighboring grain, the
activation of the source requires
sxy τσ = τs ; the critical stress to
operate the dislocation source
so D
τδ
ττ=
−
2
)(
The condition necessary for slip to propagate into the
neigbouring grain is
D
so
δτττ
2+=
D
koY += σσ
Required applied stress
Hall-Petch lawfrictional resistance in grain
stress intensity factor to activate
the dislocation source in
neighboring grain
Small yielding in front of crack tip
27
Formation of the pile-up of dislocations
obstacle
L
x
0)(
)1(2 0=−+
′−
′′
− ∫ o
L
xx
xdxfGbττ
νπ
shear stress by
the other dislocations
applied
stress
friction
stress
When edge dislocations are
piled up in front of an obstacle,
the equilibrium of forces acting
the dislocation at (x, 0) in the
pile-up is given by
τ
τ
xL
x
Gbxf o
−
−−=
))(1(2)(
ττν
In this case, the density of dislocations in the pile-up is given by
y
Gb
Ldx
xL
xL
Gb
xdxL
xL
Gbdx
xL
x
Gbdxxfn
oL
L
o
L
L
oL
oL
))(1(
)2/(
2/))(1(2
2/
2/))(1(2))(1(2)(
2/
2/ 22
2/
2/00
ττνπττν
ττνττν
−−=
′−
′+−−=
′′−
′+−−=
−
−−==
∫
∫∫∫
−
−
4
3sin
22
)2/(
2
)2/(
2
)2/(2
)2/(
})2/{(22)(
2/
2/
2
2/
2/ 22
22/
2/ 22
2/
2/ 22
2/
2/ 22
2
00
Ld
LL
xL
xdx
LxL
xdx
xL
xdL
xdxL
xL
Ldx
xL
xx
Ldx
n
xfxx
L
L
L
L
L
L
L
L
LL
=+=
′−
′′+
′−
′′+
′−
′=
′′−
′+=
−==
∫
∫∫∫
∫∫∫
−
−−−
−
θθπ
πππ
ππ
π
π
The number of dislocations is given by
The center of gravity in the pile-up becomes
xτ
τ
4/3Lx =
2/n 2/n
xdxLyxx
xyxxy Lo
xx′
′−+′−
′+′−−−= ∫0 222
22
}){(
})(3{)(
πττ
σ
xdxLyxx
xyxxy Lo
yy′
′−+′−
′−′−−= ∫0 222
22
}){(
}){()(
πττ
σ
xdxLyxx
xyxxxLo
xy′
′−+′−
′−′−−= ∫0 222
22
}){(
}){(
πττ
σ
xτ
τ
y
L
),( yx
X
Y
The normal stress perpendicular to X plane
′′−+′−
′−′−+
′′−+′−
′−′−+′
′−+′−
′−
−=
++=
∫
∫∫
xdxLyxx
xyxxx
xdxLyxx
xyxxyxd
xLyxx
xy
L
LLo
xyyyxxYY
0 222
22
0 222
22
0 22
2
22
}){(
}){(cossin2
}){(
}){(
}){(sin2
)(
2sincossin
θθ
θπ
ττ
θσθσθσσ




![lect5 - University of Cambridgemi.eng.cam.ac.uk/~mjfg/local/4F10/lect5_pres.pdf3. Usingw˜[τ]producethesetofmis-classifiedsamples Y[τ]. 4. Use update rule w˜[τ +1]=w˜[τ]+ +](https://img.pdfslide.net/doc/110x75/5f9460881b01a95a82631156/lect5-university-of-mjfglocal4f10lect5prespdf-3-usingwoeproducethesetofmis-classiiedsamples.jpg)











![W06 naprezenia glowne[tryb zgodno [ci]wbia.pollub.pl/files/86/content/files/1439_naprezenia_glowne.pdf · Tensor naprężeń Naprężenia w stanie przestrzennym: τ σ τ σ τ τ](https://img.pdfslide.net/doc/110x75/5c76fdd609d3f2b0618c336d/w06-naprezenia-glownetryb-zgodno-ciwbia-tensor-naprezen-naprezenia.jpg)

![技術士だぁヸちゃんの 材料力学基礎講座 - eonet.ne.jpnorthriver/gijutsushi/zairiki...せん断荷重: P [N] せん断応力:τ=P /A [MPa] せん断荷重: P](https://img.pdfslide.net/doc/110x75/610130ce2b9eee4c8e63aab4/eff-ce-eonetnejp-northrivergijutsushizairiki.jpg)