Embed Size (px)
Citation preview

1
Optimal Placement of Training Symbols for
Frequency Acquisition: A Cramer-Rao Bound
Approach
Aravind R. Nayak,Member, IEEE,John R. Barry,Senior Member, IEEE,
and Steven W. McLaughlin,Senior Member, IEEE
Abstract
We consider the problem of training symbol placement for timing acquisition in band-limited, baud-
rate sampled systems with inter-symbol interference and frequency offset. The conventional approach is
to place known symbols at the start of the transmitted packet and use these at the receiver to run a trained
phase-locked loop. We introduce an additional degree of freedom by allowing arbitrary locations for
the training symbols. We first consider a simplified system model where only the training symbols are
transmitted, or equivalently, the unknown data is assumed to be zero. We derive the modified Cramer-Rao
bound (CRB) on the timing estimation error variance as a function of the trained symbol locations and
then derive the optimal training symbol placement strategy to minimize the CRB. The optimal strategy,
called the split-preamble strategy, is to split the known symbols into two halves and place these at the
beginning and at the end of the packet. Simulations show that this arrangement also greatly reduces the
occurrence of lost or added symbols,i.e., cycle slips. Finally, we present a simplified analysis of the
problem when both known and unknown data are present, and show that the same arrangement also
minimizes the CRB in this case.
Index Terms
Timing recovery, training symbol placement, Cramer-Rao bound, acquisition, frequency offset,
phase-locked loop.
This work was supported by the Information Storage Industry Consortium. A brief summary of this work has been accepted
for presentation at the IEEE International Conference on Magnetics 2005.
A. R. Nayak is with Agere Systems and can be reached at [email protected]. J. R. Barry and S. W. McLaughlin are with
the Georgia Institute of Technology, and can be reached at barry, [email protected].
March 30, 2005 DRAFT

2
I. I NTRODUCTION
Timing acquisition is an important component of digital communication and data storage
systems. Before the start of transmission, the receiver usually has nominal knowledge of the
transmitter symbol duration, and no knowledge of the instant the transmission starts. During
acquisition, start of transmission is detected and the receiver’s estimate of the symbol duration
is refined. A common method to detect start of transmission is by using correlation methods. The
goal is to have the residual timing offset within half a symbol duration. Next, known symbols
at the start of the packet, also called preamble symbols, are used to operate a phase-locked loop
(PLL) in a trained fashion, leading to improved timing estimates at the receiver. At the end of
acquisition, the receiver has a better estimate of the instant transmission started and also of the
symbol duration. The conventional strategy of placing all the known symbols at the start of the
packet is not necessarily the optimal training symbol placement strategy.
The optimality of training symbol placement has been considered in the literature with respect
to channel estimation [1] [2] [3] [4] [5]. For this setting, optimization criteria considered are the
mean squared channel estimation error and the channeli.i.d. capacity. The channels considered
are finite impulse response fading channels, and the optimal training strategy consists of arranging
the known symbols in small contiguous clusters placed periodically in the data stream [1] [2].
These training symbol clusters are chosen to be asequal as possible, subject to the power
constraint on training, and also to number of taps of the channel impulse response. In [4],
channels that are both time and frequency selective are considered. It is shown that to minimize
the mean squared channel estimation error, the optimal training strategy is to use equi-spaced
and equi-powered training symbols. In [5], multiple access communication systems undergoing
fading are considered. To minimize the influence of asynchronous interference on the packets
of one user from those of other users, it is shown that the best placement strategy is to use two
clusters of equal or quasi-equal size at the ends of the packet.
In this paper, the problem of timing acquisition is considered for band-limited, baud-rate sam-
pled channels that face inter-symbol interference and a frequency offset. To improve acquisition,
the constraint of having all the training symbols at the start of the packet is relaxed, allowing
arbitrary locations for the training symbols. First, a simplified system model is considered,
where only the training symbols are assumed to be transmitted. Equivalently, the unknown data
March 30, 2005 DRAFT

3
is assumed to be zero. The modified Cramer-Rao bound (CRB) on the timing estimation error
variance is derived as a function of preamble locations, assuming a frequency offset timing
model. Then, it is shown that the CRB and the mean squared timing estimation error (MSE)
are minimized by the split-preamble arrangement, where the training symbols are split into two
halves, and these halves are placed at the beginning and at the end of the packet.
A cycle slip is said to have occurred when the receiver’s timing estimator locks on to a
timing estimate that is offset from the actual timing instant by an integral multiple of the
symbol duration. This leads to the receiver adding or dropping whole symbols. Cycle slips are
catastrophic for communication and data storage systems that employ error control codes (ECC),
as the added or lost symbols almost always leads to the ECC decoder failure. By simulation, it
is shown that the proposed training symbol placement strategy greatly reduces the occurrence
of cycle slips.
Finally, instead of assuming that only known data was transmitted, we account for the presence
of both known and unknown data. For tractable analysis, a simplified linear channel model is
derived, and the CRB is derived for frequency estimation using this model. Then, it is shown
that the split-preamble arrangement minimizes the CRB on timing estimation error variance and
the MSE in this case.
The rest of the paper is organized as follows. In Section II, the system model is presented in
detail, and the conventional acquisition method is reviewed. In Section III, the modified CRB on
the timing estimation error variance is derived as a function of the training symbol placement
assuming only known data is transmitted. In Section IV, it is shown that the split-preamble
strategy minimizes the CRB. In Section V, the mean square error performance of the split-
preamble placement is compared to that of the conventional preamble placement, demonstrating
the possible performance improvement. In Section VI, the cycle slip occurrence rate for the
two training symbol placement methods is compared, assuming acquisition based on a trained
PLL. In Section VII, a simplified analysis of joint acquisition and tracking is presented, where
the split-preamble placement is shown to minimize the CRB. The conclusions are presented in
Section VIII.
March 30, 2005 DRAFT

4
uncoded i.i.d.� h(t)
n(t)
y(t)fakg
N�1
0
Fig. 1. System block diagram with timing offsets, channel distortion and additive noise.
II. BACKGROUND: SYSTEM MODEL AND CONVENTIONAL ACQUISITION
Consider the pulse-amplitude modulated (PAM) system where the channel output waveform
y(t) is given by:
y(t) =N−1∑l=0
alh(t− lT − τl) + n(t), (1)
whereT is the bit period,al ∈ {±1} are theN i.i.d. data symbols,h(t) is the channel impulse
response,n(t) is additive white Gaussian noise, andτl is the unknown timing offset for the
lth symbol. The timing offsets are characterized by an initial timing offsetτ0 and a symbol
duration offset∆T = T − T ′, whereT ′ is the receiver’s nominal estimate of the actual timing
offset T . The frequency offset present in the system is∆f = 1/T − 1/T ′. For convenience and
ease of notation, we characterize the timing offsets using∆T instead of∆f . The timing offsets
themselves are given byτk = τ0 + k∆T .
At the receiver,y(t) is filtered by a low-pass filter with impulse response1T
sin(πt/T )πt/T
to arrive at
waveformr(t). It is assumed thath(t) is band-limited such that baud-rate samples are sufficient
statistics to reconstructr(t).
In most conventional systems, a certain number of known symbols are placed at the start
of the packet to aid acquisition of the initial timing offset and the frequency offset. At the
receiver, the incoming waveform is correlated with the waveform generated based on the known
data and the channel model, and peak detection is used to detect the start of transmission. The
symbols chosen for this section of the preamble have to be such that very high correlation is
obtained when the waveforms match, and the correlation dies down rapidly as the waveforms
get mismatched. The goal of this phase of acquisition is to get to within [−0.5T , 0.5T ) of the
actual start of transmission, whereT is the symbol duration. Depending on the channel and the
March 30, 2005 DRAFT

5
noise conditions, we can do better than just get in the [−0.5T , 0.5T ) range and the residual
timing error can be effectively modeled as a zero-mean Gaussian random variable.
The next portion of the preamble is often a periodic pattern that helps in acquiring the
frequency offset. The periodic tone is spectrally compact and therefore, passes through the
channel without distortion and can be detected easily at the receiver. A common method is to
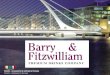
use a trained phase-locked loop (PLL) at the receiver.
PLLUPDATE
f(t)y(t)
rcv. filter
T.E.D.
kT + kτ
rkfor further
kε
r t( )
processing
Fig. 2. Conventional timing recovery is based on the phase-locked loop.
The conventional PLL-based timing recovery method is shown in Figure 2 [6]. At the receiver,
the waveformr(t) is sampled at instants{kT +τk} according to the output of the timing recovery
block to produce samples{rk} given by
rk =N−1∑l=0
alh(kT + τk − lT − τ0 − l∆T ) + nk, (2)
where{nk} are i.i.d. zero-mean Gaussian random variables of varianceσ2.
A timing error detector (TED) operates on samples and transmitted symbols corresponding
to these samples to estimate the timing error. The output of the TED is accumulated by a PLL.
The TED is chosen according to the channel model and the modulation scheme, and the PLL
structure is chosen according to the timing offset model. With a frequency offset, or equivalently
a symbol duration offset, where the receiver’s estimate of the symbol duration is inaccurate, a
second-order PLL is employed to have zero steady-state error [6]. A second-order PLL updates
its timing estimate according to
τk+1 = τk + αεk + βk−1∑l=0
εl, (3)
whereα andβ are gain parameters, andεk is the output of the TED, which estimates the timing
error εk = τk − τk.
March 30, 2005 DRAFT

6
The widely used Mueller and Muller TED generates this estimate according to [7]:
εk = rkdk−1 − rk−1dk, (4)
wheredk is thekth noiseless, perfectly-timed sample. With knowledge of the training symbols
and also of the channel response,dk can be constructed at the receiver.
The trained PLL will operate satisfactorily whenever the residual offset it faces after the first
stage of acquisition is small. The PLL gain is set reasonably high to allow for fast frequency
acquisition. High gain increases the frequency range over which the PLL can lock in and also
reduces the overhead by reducing the required length of the preamble. At the end of this phase of
acquisition, the residual frequency offset can also be modeled as a zero-mean Gaussian random
variable.
III. C RAMER-RAO BOUND AS A FUNCTION OF THETRAINING SYMBOL LOCATIONS
The CRB on the error variance of any unbiased estimatorθ(r) of an unknown deterministic
parameterθ based on observationsr is given by
E[(θi(r)− θi)2] ≥ J−1
θ (i, i), (5)
where θi(r) and θi denote theith element ofθ(r) andθ respectively, the expectation is taken
over r, andJ−1θ (i, i) is the ith diagonal element of the inverse of the Fisher information matrix
given by
J θ = E
[
∂
∂θln fr|θ(r|θ)
] [∂
∂θln fr|θ(r|θ)
]T , (6)
where the expectation is overr, andfr|θ(r|θ) is the probability density ofr conditioned onθ
[8].
The specific problem considered in this section is as follows. Consider the PAM system where
the channel output waveform is given by:
y(t) =∑l∈I
alh(t− lT − τl) + n(t), (7)
where I, the set ofK training locations, is a subset of the universal set given byU =
{0, 1, . . . , N − 1}. The other parameters are as defined for the system of (1). In words, it is
assumed that the only symbols transmitted are the trained acquisition symbols, or equivalently,
March 30, 2005 DRAFT

7
the payload bits are assumed to be absent. After low-pass filtering, uniform samples of the
resulting waveformr(t) are taken, and thekth uniform sample is given by:
rk =∑l∈I
alh(kT − lT − τl) + nk, (8)
where{nk} are i.i.d. zero-mean Gaussian random variables of varianceσ2. A total of N + 2M
samples are assumed to be taken, and stacked into an observation vectorr = [r−M r−M+1 . . . rN+M−1]T ,
where eventually,M −→∞. The problem now is to evaluate the CRB for the estimation of the
timing parameterθ = [∆T τ0]T given the set of observationsr. This is, in general, a function of
the set of training symbols{al}.The average CRB, averaged over all training symbol patterns,
is got by taking the expectation ofJ−1θ with respect to the training symbols. This is intractable
for the system model considered here. Instead, a looser, more tractable lower bound, called the
modified CRB (MCRB), is employed. The modified CRB is given by [9]:
E[(θi(x)− θi)2] ≥ E[J θ]
−1(i, i), (9)
where the expectation is now overr and{al}. For ease of notation, the MCRB is refered to as
the CRB in the sequel.
The Fisher information matrixJ θ has an elegant form when the densityfr|θ(r|θ) is multi-
variate normal [10]. Specifically, ifr is normally distributed with meanmr(θ) and covariance
matrix R, thenJ θ can be simplified to
J θ = GT R−1G, (10)
whereG is thesensitivity matrix, given by
G =
[∂
∂θmT
r (θ)
]= [g0 g1 · · · gP−1], (11)
P is the size of the vectorθ and the(N + 2M) × 1 column vectorgi = ∂mr(θ)∂θi
denotes
the variation in the meanmr(θ) with respect toθi. For the system model under consideration,
P = 2 andR = σ2I(N+2M)×(N+2M), whereI(N+2M)×(N+2M) is the identity matrix of dimension
(N + 2M). Substituting these and lettingM −→ ∞, the average Fisher information evaluates
to [11]
E[J θ] =Eh′
σ2
∑k∈I k2 ∑k∈I k∑
k∈I k K
, (12)
March 30, 2005 DRAFT

8
whereEh′ is the energy in the derivative of the pulse shapeh(t). Inverting this, the CRB on
estimating the timing parameters during acquisition is given by
E[(∆T (r)−∆T )2] ≥ V∆T ,
E[(τ0(r)− τ0)2] ≥ Vτ0 , (13)
where
V∆T =σ2
KEh′
11K
∑K−1k=0 x2
k − ( 1K
∑K−1k=0 xk)2
=σ2
KEh′
1
var(I),
Vτ0 =σ2
KEh′
1K
∑K−1k=0 x2
k1K
∑K−1k=0 x2
k − ( 1K
∑K−1k=0 xk)2
=σ2
KEh′
(1 +
mean(I)2
var(I)
), (14)
where the setI has been redefined in terms of itsK ordered elementsxk, k = 0, 1, . . . , K − 1,
such that0 ≤ x0 < x1 < · · · < xK−1 ≤ (N − 1). The mean and variance of any given vector
S = [s0, s1, · · · , sK−1] are defined by mean(S) = 1K
∑sk and var(S) = 1
K
∑s2
k −(
1K
∑sk
)2.
The problem of choosing the best training locations, therefore, is the same as choosing the set
I = {xk}K−10 .
The problem statement thus far has been that of estimating∆T and τ0, given the set of
observationsr. This can be generalized to the problem of estimating∆T and τm, for any m.
For the generalized problem, the CRB on the estimation of∆T is the same as before, and the
CRB for τm is given by
Vτm =σ2
KEh′
(1 +
(mean(I)−m)2
var(I)
). (15)
Therefore, the CRB on the estimation of∆T is independent of the particular choice ofm. The
CRB on the estimation ofτm is minimized whenm = mean(I).
The relative importance of estimating the two parameters∆T and τm can be quantified by
the mean squared error (MSE) defined by
MSE =1
N
N−1∑k=0
E[(τk − τk)2]. (16)
March 30, 2005 DRAFT

9
The mean squared error can be rewritten as MSE =
1
N
N−1∑k=0
E[(τm + (k −m)∆T − τm − (k −m)∆T )2], (17)
where m is chosen as the reference index. For CRB-achieving estimates of∆T and τm, the
MSE is given by
MSE =σ2
KEh′
{1 +
var(U ) + (mean(U )−mean(I))2
var(I)
}, (18)
where I is the set of acquisition indices, andU is the universal set of indices. The MSE
expression is independent of the choice of the reference indexm. The ultimate goal of the
timing estimation problem is to minimize the MSE. In the next section, the training symbol
arrangement that minimizes the CRB on∆T is first derived, and then it is shown that this
arrangement minimizes the MSE.
IV. OPTIMAL TRAINING LOCATIONS
In this section, the optimal index setI to minimizeV∆T , or equivalently to maximize var(I), is
arrived at. This is the split-peamble strategy. Next, the problem of minimizingVτ0 is considered,
and it is shown that the minimizing arrangement is in fact different in this case. The split-
preamble arrangement minimizes the CRB for the estimation ofτm, wherem = mean(I) =
mean(U ) = (N − 1)/2. Finally, it is shown that the split-preamble strategy minimizes the mean
squared error. In other words, the problem of minimizing the MSE is equivalent to that of
minimizing the estimation error variance of[∆T τ(N−1)/2], and not of[∆T τ0].
A. MinimizingV∆T
Theorem: Let K be an even natural number. LetI = [i0, i1, · · · , iK−1] be any vector of integers
satisfying
0 ≤ i0 < i1 < · · · < iK−1 ≤ (N − 1) (19)
and letIo be given by
Io = [0, 1, · · · , K
2− 1, N − K
2, · · · , N − 2, N − 1]. (20)
Then
var(Io) ≥ var(I), (21)
March 30, 2005 DRAFT

10
with equality iff I = Io.
Proof: Let Io = [io0, io1, · · · , io(K−1)], i.e.
iok = k, 0 ≤ k ≤ K
2− 1,
= (N −K) + k,K
2≤ k ≤ K − 1. (22)
The mean ofIo is µo = N−12
. The variance of a vector does not change if a constant is added
to or subtracted from all the elements. Therefore, two new vectorsI1 and I1o are now formed
by subtractingµ0 from I andIo. In symbols,
I1 = [x0, x1, · · · , xK−1],
I1o = [xo0, xo1, · · · , xo(K−1)],
xk = ik − µo,
xok = iok − µo. (23)
The subtraction does not change the variance, and therefore, var(I1) = var(I) and var(I1o) =
var(Io). An alternative notation is
I1 = I1o + ε, (24)
whereε = [ε0, ε1, · · · , εK−1] and εi = xi − xoi. The setε is the set of perturbations needed to
go from setI1o to the setI1, and satisfies the following constraints.
0 ≤ ε0 ≤ ε1 ≤ · · · ≤ εK2−1 ≤ (N −K)
−(N −K) ≤ εK2≤ εK
2+1 ≤ · · · ≤ εK−1 ≤ 0
εK2−1 − εK
2≤ (N −K). (25)
0 – µoK2---- 1– µo– N – 1 – µoN
K2----– µo–
xoi xi
0
Fig. 3. The various constraints ofε.
Figure 3 explains the constraints onε. The elements ofI1o are marked along the real line.
The left-half elements are all negative and the only perturbations allowed are positive. The
March 30, 2005 DRAFT

11
perturbations{εi}K2−1
0 form an increasing sequence with the maximum beingN − K, which
happens wheniK2−1 = N − K
2− 1. Similarly, the second restriction arises from the right-half.
The third restriction arises from the fact that there areN slots andK distinct, ordered elements,
and therefore, no two consecutive elements can be separated by more thanN −K.
The variances under consideration, var(Io) and var(I), can now be rewritten as
var(Io) =1
K
∑x2
ok,
var(I) =1
K
∑x2
k −(
1
K
∑εk
)2
. (26)
Next, consider the left half, i.e.,0 ≤ k ≤ K2− 1. The intuition for the following steps is as
follows. For the left half, all thexoks are negative and positiveεks will ensure that|xk| < |xok|
as long asxk does not exceed−xok for all possibleεk. From (22), (23), and (25),
0 ≤ εk ≤ N −K, (27)
=⇒ xok ≤ xok + εk ≤ N −K + xok, (28)
=⇒ iok − µo ≤ xk ≤ iok − µo + N −K, (29)
=⇒ |xk| ≤ max(|iok − µo|, |iok − µo + N −K|), (30)
=⇒ |xk| ≤ max(N − 1
2− k,N −K +
N − 1
2+ k), (31)
=⇒ |xk| ≤N − 1
2− k, (32)
=⇒ |xk| ≤ |xok|. (33)
The equality condition is satisfied iffεk = 0 since N−12− k > N − K + N−1
2+ k for the left
half. By proceeding similarly, it can be shown that the same holds for the right half. Combining
the two leads to
|xk| ≤ |xok| for 0 ≤ k ≤ (K − 1), (34)
with equality iff xk = xok for all k.
Combining (26), (34) and the fact that(
1K
∑εk
)2≥ 0 with equality iff ε = 0 leads to the
desired result,i.e.,
var(Io) ≥ var(I), (35)
with equality iff I = Io.
March 30, 2005 DRAFT

12
Symbol index
Tim
ing
offs
et
Symbol index
Tim
ing
offs
et
Conventionalpreamble locations
Proposedpreamble locations
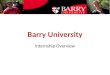
Fig. 4. Proposed training symbol placement strategy.
Therefore, to minimizeV∆T , the optimum strategy is the split-preamble strategy, where the
available training symbols are split into two equal halves and placed at the beginning and at the
end of the packet, as shown in Figure 4. The intuition behind the split-preamble strategy is that
the observations need to be as far apart as possible while estimating the slope of a straight line.
B. MinimizingVτ0
Next considerVτ0. Recall from (14) that
Vτ0 =σ2
n
Eh′K
(1 +
mean(I)2
var(I)
). (36)
Therefore, the optimal arrangement in this case (I ′) is the one that satisfies
var(I ′)
mean(I ′)2>
var(I)
mean(I)2(37)
for all I 6= I ′. This can be split into two steps: first, find the optimal arrangement for each
possible value of the mean and then find the optimum over all mean values,i.e., for each value
of the meank, first a setIk is chosen such that mean(Ik) = k and
var(Ik) > var(I) (38)
for all I 6= Ik with mean(I) = k. As the next step, a setI ′ = Ik is picked, where
var(Ik)
k2>
var(Ij)
j2(39)
for all j 6= k.
The solution of this problem leads to the following arrangement. A total ofK1 known symbols
are placed at the start andK −K1 at the end of the packet where
K1 =
⌈K
(1− (3N −K)K
6N2
)⌉. (40)
March 30, 2005 DRAFT

13
For N >> K, K1 ≈ K, which means that almost all the known symbols need to be placed at
the start of the packet to do the best estimation ofτ0. The optimal arrangement for estimating
∆T performs worse by a factor of approximately2 as far as the estimation error variance for
τ0 goes. One interpretation of this is that the known symbols at the end of the packet do not
contribute to any great extent to the estimation of the initial offsetτ0, and the error variance is
roughly equivalent to that with onlyK/2 known symbols, all at the beginning.
One way to work around this mismatch of the optimal solutions is to redefine the indices so
that the mean for the optimal solution for estimating∆T is zero, i.e., subtractN−12
from all
the indices, as done in the proof in the previous subsection. From (36), it is evident having a
zero mean is the best possible solution givenK symbols. Therefore, the optimal scheme for
estimating∆T performs optimally forτ0 too. The difference being, in this case, the timing
offset at the center of the packet is estimated instead of at one end. Assuming that the estimates
∆T and τ0 are used to compute the expected timing offsets for the remaining positions, this
arrangement makes intuitive sense as this minimizes the maximum interpolation distance, thus
minimizing the maximum absolute value of the interpolation error. This also ties in with the
earlier analysis that the CRB on estimation ofτm is minimized form = mean(I). The intuitive
explanation is formalized in the next subsection, where the split-peamble arrangement is shown
to minimize the MSE.
C. Minimizing the MSE
Recall from (18) that the MSE for the CRB-achieving timing estimator is given by
MSE =σ2
KEh′
{1 +
var(U ) + (mean(U )−mean(I))2
var(I)
}. (41)
The index set for the split-preamble strategy, namely the setIo, has the following properties:
• It has the highest variance among all index setsI.
• mean(Io) = mean(U ).
Combining these properties with the MSE espression leads to the conclusion that the split-
preamble arrangement minimizes the MSE.
V. PERFORMANCEEVALUATION OF THE SPLIT-PREAMBLE ARRANGEMENT
In the previous section, the split-preamble strategy was shown to minimize the CRB on fre-
quency estimation, and also the mean squared error. In this section, three schemes are compared
March 30, 2005 DRAFT

14
for performance with respect to estimating∆T :
• all the known symbols at the start of the packet (I1) with error varianceV1;
• the split-preamble arrangement (I2) with V2;
• sprinkle the known symbols uniformly throughout the packet (I3) with V3.
The CRB on the timing estimation error variance for these three schemes can be evaluated using
(14) to be the following:
C1 =V1Eh′
σ2n
=12
K(K2 − 1),
C2 =V2Eh′
σ2n
=1
K(K2−1)12
+ KN(N−K)4
,
C3 =V3Eh′
σ2n
=(K − 1)2
(N − 1)2
V1
σ2, (42)
where the normalized error variance coefficientC is defined above.
0 1000 2000 3000 400010–10
10–9
10–8
10–7
10–6
10–5
Number of known symbols
Nor
mal
ized
err
or v
aria
nce
coef
ficie
nt (
C)
Conventional
Uniform
Optimal
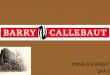
Fig. 5. Split-preamble arrangement much better than conventional one.
Figure 5 compares the performance of the three training symbol arrangements forN = 4000,
andK ranging from1 to 4000. The block lengthN = 4000 was chosen to be similar to the ones
currently used for digital magnetic recording. The optimal arrangement significantly outperforms
the conventional one, and the uniform sprinkling scheme is not much worse off. As an example,
compare the total number of symbols needed to get the normalized error variance coefficient
C = 2× 10−9. The optimal scheme needs 86 symbols, the uniform scheme needs 248 symbols,
whereas the conventional scheme needs 1588 symbols of the 4000 to be known! The MSE
March 30, 2005 DRAFT

15
performance comparison of the three schemes leads to similar conclusions, and is omitted for
brevity.
VI. CYCLE SLIPS
A cycle slip is said to have occurred when the receiver gains or loses whole symbols. This
could happen if the receiver’s timing estimates are off by whole multiples of the symbol durations.
At low SNR, PLL exhibits cycle slips. Even with perfect initialization, the PLL occassionally
loses track and settles at a timing offset that is an integral multiple of the symbol duration. This
leads to addition or deletion of symbols in the data stream sent to the rest of the receiver. For
digital communication or data storage applications that employ error correction codes (ECC) to
combat channel noise, this almost always leads to the ECC decoder failure.
An added advantage with the split-preamble method is that it is well equipped to handle
cycle-slips. Independent estimators can be used at the beginning and at the end of the packet
to locate the start and the end training symbols, thus reducing the effects of cycle slips in the
tracking mode in between.
Simulation results are presented for the following simple acquisition strategy. The known
symbols are placed half at the beginning and half at the end of the packet. Let the two preamble
sequences be denoted byS1 (beginning) andS2 (end) respectively. At the receiver, correlation
detection is performed and a trained PLL, trained to the sequenceS1, is run. At the end of
the S1 sequence, the PLL is switched to the decision-directed mode and operated in that mode
till the end of the packet,i.e., for the unknown dataand for S2. Next, out of theN decisions
available, the lastK/2 are picked and correlated with theK/2 symbols corresponding toS2 for
different shifts and the shift needed, saym, to get the correlation peak, is recorded. The timing
instants corresponding toS2 are then shifted back bymT to undo the cycle slip. The timing
instants to be used for the tracking mode are then got by interpolating, for example,τ(K/2)−1
and τN−1−(K/2). An alternative option is to fit a least-squares straight line through more than
one timing estimate from each end of the packet. By this method, though the exact location of
the cycle slip during track has not been detected, the cycle slip can be corrected as long as the
correlation of theS2 sequence was successful. To aid good start-up of the PLL,S1 is chosen to
be a periodic pattern, and to aid the correlation detection for the end of the packet,S2 is chosen
to be a pseudo-random pattern.
March 30, 2005 DRAFT

16
2.5 3 3.5 4 4.5 5 5.5 610–5
10–4
10–3
10–2
10–1
100
SNR (dB)
Fre
quen
cy o
f Cyc
le S
lips
Optimal
Conventional
Fig. 6. Splitting the preamble reduces the occurrence of cycle slips.
Figure 6 shows the improvement due to the aforementioned acquisition scheme when compared
to the conventional scheme where all the known symbols are placed at the beginning of the
packet. Once again, the simulation parameters are chosen to be similar to those for digital
magnetic recording. The channel is a PR-IV channel [12], which is characterized by the impulse
responseh(t), where
h(t) =sin(πt/T )
πt/T− sin(π(t− 2T )/T )
π(t− 2T )/T. (43)
The packet length was chosen to beN = 5000. K = 120 of these symbols are known at the
receiver. For the conventional system, a length-120 periodic version of the[1 1 − 1 − 1] pattern
is used as the training sequence. For the proposed scheme, a length-60 sequence formed by
repetitions of the[1 1 − 1 − 1] pattern is used for for the training symbols at the start of the
packet. For the known sequence at the end of the packet, a pseudo-random length-60 sequence
is chosen. The timing offsets used areτ0 = 0 and∆T = 0.002T . The PLL gain parameters are
α = 0.04 and β = α2/4, chosen to minimize the number of cycle slips for the conventional
system at an SNR of5 dB. For the split-preamble arrangement, the number of cycle slips that
were not corrected is plotted. The split-preamble acquisition scheme reduced the number of
residual cycle slips by a factor of10 to 100 depending on the SNR. In terms of SNR, at a cycle
slip rate of10−3, it leads to an improvement of around1.5 dB.
Also simulated was the system where all the data symbols were known at the receiver,i.e.,
the fully-trained system. The fully-trained system did not exhibit any cycle slips for the range of
March 30, 2005 DRAFT

17
SNRs considered when the PLL-based system was used for timing recovery. This leads to the
conclusion that one way to improve the timing recovery performance is to improve the quality
of the decisions available to the timing recovery block, providing additional justification for
iterative timing recovery methods [11].
VII. JOINT ACQUISITION AND TRACKING
In Sections III and IV, acquisition was considered in isolation, where only the training symbols
were transmitted. In this section, a simple version of the problem of joint acquisition and tracking
is considered. The payload section is not assumed to be zero. The timing offset model once again
consists of an initial timing offsetτ0 and a frequency offset parameter∆T . The presence of both
trained and unknown data makes the CRB, and also the MCRB, intractable. To facilitate analysis,
a linear observation model based on the characteristics of the timing error detector (TED) is first
derived. Based on this model, the CRB on estimating the timing parameters and also the MSE
are computed, and finally, it is shown that the split-preamble arrangement minimizes the MSE
in this case.
A. Linear Model
An ideal timing error detector would outputεk = εk. In the presence of noise, the TED would
output a noisy version given byεk = εk + νk. For a linear TED,νk would be independent ofεk.
Practical TEDs are linear for an SNR-dependent range aroundεk = 0. However, in the tracking
mode, the operatingεk values are usually small enough for the linearity assumption to hold. In
the trained mode, the TED is linear over a much larger range, and therefore, the TED linearity
assumption holds even with the large timing offsets faced during acquisition. For any TED, we
can write
εk = εk + νk, (44)
= τk − τk + νk. (45)
Constructing a new observationyk = τk + εk leads to the following observation model:
yk = τk + νk. (46)
Therefore, to arrive at the new model, corresponding outputs from the PLL and the TED need
to be added. The PLL outputs an estimate ofτk assuming that only observations{rl}k−10 are
March 30, 2005 DRAFT

18
available. This is, therefore, ana priori estimate ofτk. The TED’s estimateεk, is based on the
present observationrk as well. Hence,yk, which is the sum ofτk and εk, is an a posteriori
estimate ofτk and the quality of this estimate depends on the quality of the TED output. The
new observation model is linear where the TED characteristics are linear.
In vector notation, the linear measurement model can be written as follows:
y = τ + ν, (47)
wherey = [y0 y1 . . . yK−1]T , τ = [τ0 τ1 . . . τK−1]
T , and ν = [ν0 ν1 . . . νK−1]T . The noise
variables{νk} were assumed to be independent zero-mean normal random variables. The timing
recovery block assumed for this section takes advantage of theK known symbols in the training
phase, leading to a measurement noise varianceσ2a for the observations corresponding to the
known symbols (acquisition), andσ2t for the observations corresponding to the data symbols
(tracking) such thatσ2a < σ2
t . An example is the PLL-based timing recovery system, where
the timing estimation error variance is lesser with training than otherwise. Though the timing
estimation error variance as a function of the bit position does not show the step-function type
behavior assumed here, but rather varies in a gradual fashion, this observation noise model is
used as an approximation.
B. CRB for the linear model
Let the parameter to be estimated beθ = [∆T τ0]T , and letx(θ) be the noiseless observation.
For the linear model of (47), thekth component ofx(θ) is justxk = τk = k∆T + τ0. The noise
variables are noti.i.d. Using (10), the Fisher information matrix can be written as
J θ =1
σ2a
∑k∈Ia
k2 k
k 1
+1
σ2t
∑k∈I t
k2 k
k 1
, (48)
where the ordered vectorsIa and I t contain the indices corresponding to the training and the
data symbols respectively. The elements ofIa and I t together span all the integers from0 to
N − 1. Let ma andmt be the mean ofIa andI t respectively, and let their respective variances
be Va andVt. The determinant ofJ θ can be written as
|J θ| =
{K
σ2a
+N −K
σ2t
}{K
σ2a
Va +N −K
σ2t
Vt
}· · ·
+K
σ2a
N −K
σ2t
(ma −mt)2. (49)
March 30, 2005 DRAFT

19
The CRB then evaluates to
V∆T =1
|J θ|
[K
σ2a
+N −K
σ2t
],
Vτ0 =1
|J θ|
[K
σ2a
(Va + m2a) +
N −K
σ2t
(Vt + m2t )
]. (50)
C. Minimizing the CRB
With only training symbols alone being transmitted, minimizingV∆T was equivalent to max-
imizing the variance of the set of acquisition indices. To minimizeV∆T with joint acquisition
and tracking, from (50), the acquisition indices need to be picked to maximize the determinant
|J θ|. As before, a constant is subtracted from all the indices so that the new indices are of the
form i − (N − 1)/2 for i = 0 to N − 1, and these are apportioned into the vectorsI ′a and I ′
t
with mean and variance beingm′a, V
′a and m′
t, V′t respectively. Shifting by a constant does not
change the variance, and therefore,V ′a = Va andV ′
t = Vt. Also, since all the indices are shifted
by the same amount,m′a −m′
t = ma −mt. Using these in (49) leads to the conclusion that the
shift does not affect the evaluation of the determinant.
Next, consider the split-preamble arrangement of Section IV. Let this be the candidate set of
acquisition indices for joint acquisition and tracking, denoted byIoa, where
Ioa = [0, 1, · · · , K
2− 1, N − K
2, · · · , N − 2, N − 1]. (51)
For this set-up, the means of the shifted vectors,m′a andm′
t, are zero and the determinant can
be rewritten as
|J θ|o =
{K
σ2a
+N −K
σ2t
} 1
σ2a
∑k∈I ′o
a
k2 +1
σ2t
∑k∈I ′o
t
k2
,
=
{K
σ2a
+N −K
σ2t
}× 1
σ2t
∑k∈I ′
k2 +
(1
σ2a
− 1
σ2t
) ∑k∈I ′o
a
k2
,
= C1
C2 + C3
∑k∈I ′o
a
k2
, (52)
March 30, 2005 DRAFT

20
whereU ′ is the ordered vector containing all shifted indicesi−(N−1)/2 for i = 0 to i = N−1,
which is a constant, independent of the choice ofIa. The definition of the constantsC1, C2 and
C3 follow from equations above.|J θ|o is a function of only the variance ofI ′oa.
For an arbitrary choiceIa, the determinant evaluates to
|J θ| = C1
C2 + C3
∑k∈I ′
a
k2
− C23
∑k∈I ′
a
k
2
. (53)
It was shown in Section IV that the choiceIa = Ioa maximizes the term
∑k∈I ′
ak2. In
addition,∑
k∈I ′oak = 0. Therefore, the choiceIa = Io
a maximizes|J θ|, leading to a maximum
|J θ| = |J θ|o. As with the acquisition case, it can also be shown that the same arrangement also
minimizesVτm, wherem = (N − 1)/2. In summary, for the system model considered here, the
choice that minimizes the CRB for frequency estimation with acquisition alone minimizes the
CRB for frequency estimation for joint acquisition and tracking case as well.
D. Minimizing the MSE
The MSE, defined by (16), evaluates to
MSE =1
Kσ2
a+ N−K
σ2t
[1 +
T1 + T2
|J θ|
], (54)
where
T1 = var(U )
(K
σ2a
+N −K
σ2t
)2
,
T2 =(N −K)2K2
N2
(1
σ2a
− 1
σ2t
)2
(ma −mt)2. (55)
The term T1 is independent of the choice of the acquisition indices. The split-preamble
arrangement has the property thatma = mt, and therefore, it minimizes the termT2. In
addition, the split-preamble arrangement also maximizes the determinant|J θ|. Therefore, using
these properties, it is evident that the split-preamble arrangement minimizes the MSE for joint
acquisition and tracking with the linear observation model.
VIII. C ONCLUSION
During acquisition, the goals are to accurately estimate the initial phase offset and the fre-
quency offset. The conventional acquisition method is to place known symbols at the start
March 30, 2005 DRAFT

21
of the packet and use these to operate a PLL in the trained mode. In this paper, a more
general acquisition set-up was considered where the training symbols could be arbitrarily placed
throughout the packet. For this setting, first assuming only training symbols are transmitted, it
was shown that the split-preamble arrangement minimized the CRB on frequency estimation, and
also the mean squares estimation error of all the timing offsets. The split-preamble arrangement
consists of splitting the training symbols into two halves and placing these at the start and at
the end of the packet, exploiting the fact that the timing offsets follow a straight line. This
arrangement was also shown by simulation to greatly reduce the occurrence of lost of added
symbols,i.e., cycle slips. Finally, for joint acquisition and tracking, with a linearized observation
model, the split-preamble arrangement was shown to minimize the CRB for frequency estimation
and the mean squared estimation error of all the timing offsets.
REFERENCES
[1] S. Adireddy, L. Tong, and H. Viswanathan, “Optimal placement of known symbols for frequency-selective flat-fading
channels,”IEEE Transactions on Information Theory, vol. 48, no. 8, pp. 2338–2353, Aug. 2002.
[2] R. Negi and J. Cioffi, “Pilot tone selection for channel estimation in a mobile OFDM system,”IEEE Transactions on
Consumer Electronics, vol. 44, no. 3, pp. 1122–1128, Aug. 1998.
[3] M. Dong, L. Tong, and B. M. Sadler, “Optimal insertion of pilot symbols for transmissions over time-varying flat fading
channels,”IEEE Transactions on Signal Processing, vol. 52, no. 5, pp. 1403–1418, May 2004.
[4] X. Ma, G. B. Giannakis, and S. Ohno, “Optimal training for block transmissions over doubly selective wireless fading
channels,”IEEE Transactions on Signal Processing, vol. 51, no. 5, pp. 1351–1366, May 2003.
[5] C. Budianu and L. Tong, “Training symbol placement for packet transmissions under asynchronous influence,”Proceedings
of the IEEE Workshop on Signal Processing Advances in Wireless Communications, June 2003.
[6] H. L. Van Trees,Detection, Estimation, and Modulation Theory, 1st ed. New York: John Wiley and Sons, Inc., 1971,
vol. 2, chapter 3, pp. 37–84.
[7] K. Mueller and M. Muller, “Timing recovery for digital synchronous data receivers,”IEEE Transactions on Communica-
tions, vol. com-24, no. 8, pp. 516–531, May 1976.
[8] H. L. Van Trees,Detection, Estimation, and Modulation Theory, 1st ed. New York: John Wiley and Sons, Inc., 1968,
vol. 1, chapter 2, pp. 72–85.
[9] A. N. D’Andrea, U. Mengali, and R. Reggiannini, “The modified Cramer-Rao bound and its application to synchronization
problems,”IEEE Transactions on Communications, vol. 42, no. 2, pp. 1391–1399, Feb. 1994.
[10] L. L. Scharf and L. McWhorter, “Geometry of the Cramer-Rao bound,”Signal Processing, vol. 31, no. 3, pp. 1–11, Apr.
1993.
[11] A. Nayak, “Iterative timing recovery for magnetic recording channels with low signal-to-noise ratio,” PhD Dissertation,
Georgia Institute of Technology, School of ECE, Aug. 2004.
[12] R. Cideciyan, F. Dolivo, R. Hermann, W. Hirt, and W. Schott, “A PRML system for digital magnetic recording,”IEEE
Journal on Selected Areas in Communications, vol. 10, no. 1, pp. 38–56, Jan. 1992.
March 30, 2005 DRAFT