Embed Size (px)
Citation preview

1
Sciences du comportement N2UE 7 E4
L’approche écologiqueL’approche écologique

2
Introduction • Pour effectuer un geste -> 2 phénomènes indissociables
La perception et L’action La perception et L’action
– On perçoit la situation dans laquelle on est
– puis en fonction de la situation on réalise le geste (mouvement)
– puis on ne sert de feedbacks (perception) pour contrôler ce mouvement
• Deux grandes approches (théories) s’opposent. Leurs divergences se situent autour de ces deux phénomènes

3
Plan du cours1. Problèmes de l’approche cognitive au niveau moteur 2. Réponses de l’approche écologique au niveau moteur3. Problèmes de l’approche cognitive au niveau
perceptif4. Réponses de l’approche écologique au niveau
perceptif : 1. La perception directe2. Le flux3. Les affordances
5. Le couplage perception - action6. Applications des différents modèles

4
Modèle de référence: l’ordinateurl’ordinateur
• Le système nerveux central est très sollicité
1. Problèmes de l’approche cognitive au niveau moteur

5
1. Problèmes de l’approche cognitive au niveau moteur
Modèle de référence: l’ordinateur
• Le système nerveux central est très sollicité
• Il calcule tout!
– Il traite l’information
– Il programme le mouvement
– Il construit une représentation de l’action

6
• Le SNC TRAITE constamment de l’information
Perception Sélection Paramétrisation
SNC
1. Problèmes de l’approche cognitive au niveau moteur

7
• Le SNC PROGRAMME constamment le mouvement:
1. Hiérarchisation infinie
Il y a toujours quelque chose qui contrôle quelque chose d’autre Théorie des petites boites!
1. Problèmes de l’approche cognitive au niveau moteur

8
SNC
Sélection ParamétrisationPerception

9
SNC
Sélection ParamétrisationPerception
Attentionsélective
Registre sensoriel
Mémoire à court terme
Mémoire à long terme
RépétitionEncodageÉlaboration
Paramétrisation
Répétition
souvenir

10
• Le SNC PROGRAMME constamment le mouvement:
1. Hiérarchisation infinie
2. L’action est toujours préprogrammée
Pour les mouvements lents: préprogrammation + régulation
Pour les mouvements rapides: la CR préprogramme la prochaineaction
1. Problèmes de l’approche cognitive au niveau moteur

11
• Le SNC construit constamment une REPRESENTATION de l’action
Sans représentation il n’y a pas d’action maîtrisée. Ce qui implique:
Qu’il faut verbaliser (cela aide à se « représenter » le mouvement).
Ou tout au moins, mettre en place toutes sortes de situationspédagogiques qui permettent de se représenter l’action qui doit êtreapprise, dans un premier temps, puis maîtrisée, par la suite.
1. Problèmes de l’approche cognitive au niveau moteur

12
MAIS!!! ATTENTION!Le corps est composé de plus de 790 muscles quicontrôlent plus de 110 articulations!!!
1. Comment le SNC peut il programmer et traiter tout ces degrés de liberté en même temps ?
Questions à l’approche cognitive:
Même les PMG sont trop coûteux pour le SNCMême les PMG sont trop coûteux pour le SNC : -Il faut traiter l’information (identification de l’information),sélectionner le bon PMG, aller le chercher en MLT, le mettredans la MCT, le paramétriser….. C’est toujours aussi coûteux
-Comment utiliser les PMG lors des nouveaux gestes ?-Où sont ils ? Existent ils vraiment?
D’autre part les PMG posent pas mal de problèmesD’autre part les PMG posent pas mal de problèmes
PMG ??

13
MAIS!!! ATTENTION!Le corps est composé de plus de 790 muscles quicontrôlent plus de 110 articulations!!!
1. Comment le SNC peut il programmer et traiter tout ces degrés de liberté en même temps ?
Questions à l’approche cognitive:
2. Comment le SNC peut il être efficace si son fonctionnement est basé sur la préprogrammation, alors que tout est changeant (environnement humain et physique) et nouveau?
3. Qu’est ce que la représentation de l’action ? Où cela se trouve t’il ? Comment prouver son existence?

14
L’approche écologique peut résoudre ces problèmes!!!
• Gibson (1904, 1979) a été le premier à dire que tout peut être expliqué autrement
(The ecological approach to visual perception, 1966)
Par l’approche écologiquel’approche écologique
Il n’y a pas de représentation, tout est direct!Il n’y a pas de représentation, tout est direct!

15
Plan du cours1. Problèmes de l’approche cognitive au niveau moteur 2. Réponses de l’approche écologique au niveau
moteur3. Problèmes de l’approche cognitive au niveau
perceptif4. Réponses de l’approche écologique au niveau
perceptif : 1. la perception directe2. Le flux3. Les affordances
5. Le couplage perception - action6. Applications des différents modèles

16
2. Réponses de l’approche écologique au niveau moteur
Modèle de référence: l’auto-organisation!

17
2. Réponses de l’approche écologique au niveau moteur
Modèle de référence: l’auto-organisation! • Le système nerveux central est le moins sollicité• Il ne calcule rien!
– Il ne traite pas l’information
– Il ne programme pas le mouvement
– les représentations n’existent pas
D’après cette approche, tout est mis en placepour que le SNC s’économise au maximum!

18
2. Réponses de l’approche écologique au niveau moteur
Il existe même des organismes sans SNC (donc ni
traitement ni représentation) qui peuvent pourtant changer de comportement!

19
2. Réponses de l’approche écologique au niveau moteur
Il existe même des organismes sans SNC (donc ni
traitement ni représentation) qui peuvent pourtant changer de comportement!
– Glycine max, tournesol

20
2. Réponses de l’approche écologique au niveau moteur
Il existe même des organismes sans SNC (donc ni
traitement ni représentation) qui peuvent pourtant changer de comportement!
– Glycine max, tournesol– Robots

21
2. Réponses de l’approche écologique au niveau moteur
Il existe même des organismes sans SNC (donc ni
traitement ni représentation) qui peuvent pourtant changer de comportement!
– Glycine max, tournesol– Robots – Sans représentation: gazelle poursuivie par un
prédateur

22
2. Réponses de l’approche écologique au niveau moteur
Il existe même des organismes sans SNC (donc ni
traitement ni représentation) qui peuvent pourtant changer de comportement!
– Glycine max, tournesol– Robots – Sans représentation: gazelle poursuivie par un
prédateur– Mille-pattes: locomotion similaire à un animal à
quatre-pattes après amputation (von Holst)

23
2. Réponses de l’approche écologique au niveau moteur
• Pourquoi l’être humain devrait il être le seul animal à devoir traiter de l’information?
– Relation amicale
– Régulation du trafic
– Discussion entre amis
– Shoot en plein action
Au niveau plus sportif
– Attraper une balle ….

24
2. Réponses de l’approche écologique au niveau moteur
• Dès que l’homme a perçu un événement, il agit directement sans traitement
• Le seul « traitement » est le passage de l’influx nerveux dans les neurones – Mais pas de représentation!!
Tout est direct!

25
2. Réponses de l’approche écologique au niveau moteur
D’après Bernstein (1967) il y a réduction du nombre de degrés de liberté à contrôler pour soulager le SNC
Mais comment fait on un mouvement ?
Exemple: contrôle d’un véhicule
Preuves expérimentales:– tireur au pistolet (Aratyunyan, 1969)
– service au volley (Temprado et al., 1997)

26
2. Réponses de l’approche écologique au niveau moteur
2 niveaux du SN: les centres supérieurs et périphériques
• Au niveau des centres supérieurs (le Cortex):– Toutes les activités purement humaines (lectures,
réflexions….)
Mais alors que fait le SNC ?
– Intention - but de l’actionEn ce qui concerne le mouvement:
– Motivation

27
2. Réponses de l’approche écologique au niveau moteur
2 niveaux du SN: les centres supérieurs et périphériques
• Au niveau des centres supérieurs (le Cortex):
Mais alors que fait le SNC ?
– Preuve phylogénétique -> seul le cortex humain est différent des autres animaux (réflexion)-> pas de différence dans le mouvement

28
2. Réponses de l’approche écologique au niveau moteur
2 niveaux du SN: les centres supérieurs et périphériques• Au niveau des centres périphériques :
Pour effectuer un mouvement, le système nerveux périphérique est suffisant: coordination en réduisant les degrés de liberté
Mais alors que fait le SNC ?
– goutte d’acide sur la patte d’une grenouille– réflexe des bébés
– générateurs spinaux de la marche

29
2. Réponses de l’approche écologique au niveau moteur
Pour effectuer un mouvement le système nerveux périphérique est suffisant
Mais alors que fait le SNC ?
– on puisse effectuer un geste que l’on a jamais réalisé auparavant
Ce qui expliquerait qu’en sport
– ne jamais être surchargé par le contrôle de toutes nos articulations
et de tous nos muscles.
– réagir aussi vite (le traitement prend beaucoup trop de temps)

30
Rappel: diapositive sur l’approche cognitiveLe corps est composé de plus de 790 muscles qui contrôlent plus de 110 articulations!!!
1. Comment le SNC peut il programmer et traiter tout ces degrés de liberté en même temps ?
Réponses à l’approche cognitive:
Il ne les contrôle pas tous. Le système nerveux périphérique s’en charge. Les centres supérieurs ne sont responsables que des activitéshumaines et de l’intention-motivation

31
Rappel: diapositive sur l’approche cognitiveLe corps est composé de plus de 790 muscles qui contrôlent plus de 110 articulations!!!
1. Comment le SNC peut il programmer et traiter tout ces degrés de liberté en même temps ?
Réponses à l’approche cognitive:
2. Comment le SNC peut il être efficace si son fonctionnement est basé sur la préprogrammation, alors que tout est changeant (environnement humain et physique) et nouveau?
Il n’y a pas de préprogrammation. Une fois la perception finie le système réagit immédiatement. Le contrôle est plutôt en continu.

32
Rappel: diapositive sur l’approche cognitiveLe corps est composé de plus de 790 muscles qui contrôlent plus de 110 articulations!!!
1. Comment le SNC peut il programmer et traiter tout ces degrés de liberté en même temps ?
Réponses à l’approche cognitive:
2. Comment le SNC peut il être efficace si son fonctionnement est basé sur la préprogrammation, alors que tout est changeant (environnement humain et physique) et nouveau?
3. Qu’est ce que la représentation de l’action ? Où cela se trouve t’il? Comment prouver son existence?
Cela n’existe pas! Il n’y en a pas besoin!!

33
Plan du cours1. Problèmes de l’approche cognitive au niveau moteur 2. Réponses de l’approche écologique au niveau moteur3. Problèmes de l’approche cognitive au niveau
perceptif4. Réponses de l’approche écologique au niveau
perceptif : 1. la perception directe2. Le flux3. Les affordances
5. Le couplage perception - action6. Applications des différents modèles

34
Pour l’approche cognitive (comme pour l’approche écologique) le fonctionnement de l’action est le même que celui de la perception
3. Problèmes de l’approche cognitive au niveau perceptif

3s 35
– L’homme doit reconstruire l’environnement qui l’entoure
– Tout n’est qu’illusion
– Problème du mal des transports
3. Problèmes de l’approche cognitive au niveau perceptif
La perception est indirecte!La perception est indirecte!• Tout ce que l’on perçoit est faux! Il faut tout
reconstruire

36
La perception est indirecte!La perception est indirecte!• Tout ce que l’on perçoit est faux! Il faut tout
reconstruire• Toutes les informations atteignent le SNC (étape
d’identification) qui les traite et les transforme en une information globale et vraie.
• L’information traitée passe ensuite dans les autres étapes du traitement
3. Problèmes de l’approche cognitive au niveau perceptif

37
SNCSélection ParamétrisationPerception
Détection du stimulus
Reconnaissance du
patron perceptif
Statique Dynamique
Filtre sensoriel
Information traitée
Sélection de la réponse
Comprendre/reconnaître ce que cette information signifie
Choisir l’informationutile pour l’action encours
Percevoir (détecter ce quise passe)

38
MAIS!!! ATTENTION! Comme pour l’action, des questions restent sans réponse
pour la perception
2. Comment traiter une information que l’on ne connaît pas?
Questions à l’approche cognitive:
1. Comment comprendre la signification d’une information, si tout est changeant (environnement humain et physique) et nouveau?
3. Traiter de l’information prend du temps, dans ce cas comment réagir vite ?

39
L’approche écologique peut là aussi résoudre ces problèmes!!!
Il n’y a pas de représentationIl n’y a pas de représentation
Il n’y a pas de traitement de l’information, Il n’y a pas de traitement de l’information,
la la perceptionperception est est directedirecte!!

40
Plan du cours1. Problèmes de l’approche cognitive au niveau moteur 2. Réponses de l’approche écologique au niveau moteur3. Problèmes de l’approche cognitive au niveau
perceptif4. Réponses de l’approche écologique au niveau
perceptif : 1. la perception directe2. Le flux3. Les affordances
5. Le couplage perception - action6. Applications des différents modèles

1s 41
• Les informations sont directement disponibles dans l’environnement. L’homme n’a plus qu’à les prélever– L’information est « vraie »
– Il n’y a pas besoin de traitement, elle est toujours présente
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif

42
• Les informations sont directement disponibles dans l’environnement. L’homme n’a plus qu’à les prélever
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif
Exemples – Obstacle sous le pied -> information directe -> réaction
immédiate sinon chute
soit soit
traitement

43
• Les informations sont directement disponibles dans l’environnement. L’homme n’a plus qu’à les prélever– Obstacle sous le pied -> information directe -> réaction
immédiate sinon chute
– Une balle qui approche grossie sur la rétine -> information directe -> réaction immédiate sinon collision
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif

44

45
• Les informations sont directement disponibles dans l’environnement. L’homme n’a plus qu’à les prélever
• Il n’y a pas d’illusion (pas d’erreur)
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif
– La perception spécifie ce qui existe vraiment dans l’environnement
• Phylogénétiquement il n’y avait pas d’illusion (animaux pas d’illusion)
• Ou alors l’action inhibe l’illusion (peu de tâches de jugement)

1s 46
• Les informations sont directement disponibles dans l’environnement. L’homme n’a plus qu’à les prélever
• Il n’y a pas d’illusion (pas d’erreur)– La perception spécifie ce qui existe vraiment dans
l’environnement• Phylogénétiquement il n’y avait pas d’illusion (animaux pas
d’illusion)• Ou alors l’action inhibe l’illusion (peu de tâches de jugement)
– Ce que l’on appelle illusion c’est ce qui est recrée par l’homme (machine, virtualité)
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif

47
• S’il n’y a pas d’illusion et que l’information est vraie, alors il n’y a pas besoin de traitement
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif
a) Logique phylogénétique:
Les sens dépendent de l’environnement dans lequel on vit
b) Logique ontogénétique: Les enfants perçoivent dès la naissance certaines informations
« Preuves » de la perception directe

48
Caractéristiques de la perception directe
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif
• Autre façon de voir l’environnement mutualité de l’animal et de l’environnement
Approche écologique
Approche cognitive
L’homme doit traiter cequi se passe dans sonmonde sinon il ne peut pas percevoir

1s 49
Caractéristiques de la perception directe
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif
• Autre façon de voir l’environnement • Autre façon de percevoir le temps
– Tout événement qui se passe fait partie du présent

50
Caractéristiques de la perception directe
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif
• Caractère dynamiciste de la perception (et de l’action)
– M. Turvey (1992) « il n’y a pas de choses sans changement et il n’y a pas de changements sans chose, mais il n’existe que des choses changeantes »
•À toutes les échelles il y a du changement

51
Caractéristiques de la perception directe
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif
• Caractère dynamiciste de la perception (et de l’action)
– C’est parce qu’il y a du changement que l’on perçoit• La plupart du temps on est en mouvement -> on perçoit
• Pour les tâches de précision sans déplacement on bouge tout de même pour percevoir (Gert Jan, 1996)
• Même quand on a l’impression de rester immobile, on est en mouvement (posture)

3s 52
Caractéristiques de la perception directe
4.1. 1er postulat: La perception est directe!4.1. 1er postulat: La perception est directe!
4. Réponses de l’approche écologique au niveau perceptif
• Caractère dynamiciste de la perception (et de l’action)
– Un environnement statique est aussi changeant• Structure des objets entre eux: occlusion, taille-distance• Horizon• Lumière et ombre
Ce que l’on perçoit c’est l’information contenue dans la structure de la lumière

53
Plan du cours1. Problèmes de l’approche cognitive au niveau moteur 2. Réponses de l’approche écologique au niveau moteur3. Problèmes de l’approche cognitive au niveau
perceptif4. Réponses de l’approche écologique au niveau
perceptif : 1. la perception directe2. Le flux3. Les affordances
5. Le couplage perception - action6. Applications des différents modèles

54
Qu’est ce que le flux ?
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
C’est le mouvement apparent de la scène visuelle sur la rétine
Dès que le sujet bouge il crée du flux visuel qui lui permet de prélever l’information (Gibson, 1979; Warren et al, 1988)

55
Exemple de représentation graphique d’un type de flux visuel

56
Le flux visuel renseigne directement le sujet sur les
caractéristiques de son mouvement: d’où l’idée de vision kinesthésique
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
Stoffregen (1985) a montré l’existence de deux types de flux
- lamellaire = parallèle à l’axe du déplacement (en périphérie)
- radial = expansion (central)
On pense que cette vision est essentiellement périphérique

1s 57
Radial
Lamellaire

58
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
MAIS les caractéristiques du flux sont plus importantes que la zone rétinienne (expérience de la chambre mobile, Stoffregen, 1985)
Pour le contrôle de la posture: rétine central et périphérique• central sensible au flux radial ET lamellaire• périphérique sensible au flux lamellaire uniquement
Les informations sont contenues dans le flux
- elles sont donc directement perçues - elles sont dépendantes du mouvement du sujet (caractéristiques du flux = caractéristiques du mouvement réalisé)

59
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
A) Le Flux en translation
Information sur la direction du déplacement(Gibson, 1950)

2s 60

1s 61
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
A) Le Flux en translation
Information sur la direction du déplacement(Gibson, 1950)
Information sur la vitesse du déplacement(Gibson, 1950)

62
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
A) Le Flux en translation
Information sur la direction du déplacement(Gibson, 1950)
Information sur la vitesse du déplacement(Gibson, 1950)
Information sur la distance et la profondeur du déplacement(Bardy, Warren et Kay., 1997)

1s 63
Parallaxe de mouvement
Mouvementdu sujet
Mouvementde l’objet

2s 64
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
A) Le Flux en translation
Information sur la direction du déplacement(Gibson, 1950)
Information sur la vitesse du déplacement(Gibson, 1950)
Information sur la distance et la profondeur du déplacement(Bardy, Warren et Kay., 1997)
Information sur le temps qui reste avant le contact(Bardy, 1991; Lee, 1980; Laurent et al., 1989)

65
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
B) Le Flux en rotation
Information sur la vitesse du déplacement(Brandt et al., 1973)

66
Expérience du tambour optocinétique (Brandt et al., 1973)

67
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
B) Le Flux en rotation
Information sur la vitesse du déplacement(Brandt et al., 1973)
Information sur le sens du déplacement(Lackner et Dizio, 1988)

68
Flux en rotation

1s 69
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
B) Le Flux en rotation
Information sur la vitesse du déplacement(Brandt et al., 1973)
Information sur le sens du déplacement(Lackner et Dizio, 1988)
Les caractéristiques du flux sont tellement prenantes qu’elles influencent l’orientation du corps et la réalisation d’unmouvement volontaire (Marin, 1995)

70
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
C) Le Flux local
Lorsqu’un objet est en mouvement il crée un flux local

71

72
4.2. Le flux perceptif4.2. Le flux perceptif
4. Réponses de l’approche écologique au niveau perceptif
C) Le Flux local
Lorsqu’un objet est en mouvement il crée un flux local
On perçoit directement l’objet par la parallaxe de mouvement et lesautres informations statiques (occlusion, taille-distance etc..)

73
Plan du cours1. Problèmes de l’approche cognitive au niveau moteur 2. Réponses de l’approche écologique au niveau moteur3. Problèmes de l’approche cognitive au niveau
perceptif4. Réponses de l’approche écologique au niveau
perceptif : 1. la perception directe2. Le flux3. Les affordances
5. Le couplage perception - action6. Applications des différents modèles

74
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
Jusqu’à présent nous avons vu comment l’homme perçoit ses mouvements ou les objets qui se déplacent
Mais comment l’homme sait ce qu’il peut faire dans une situation donnée ?
Pour les cognitivistes: - l’homme perçoit la situation présente par reconstruction- puis il comprend la situation qu’il est en train de vivre- puis comment il s’y est déjà pris- puis comment il doit s’y prendre pour la situation présente

75
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
Pour les écologistes: l’homme contrôle son comportement en percevant directement ce que les objets de l’environnement offrent (ou permettent) comme possibilités d’action: les affordancesaffordances
En voyant un objet ou une situation, l’homme perçoit ce qu’il doit adopter comme action ou geste

76
?
Afford de s’asseoir
Afford de s’appuyer(table)

77
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
- Le sens et la valeur d’un objet sont perçus aussi rapidement que la couleur
- Une situation afford une action à une personne. Ex: jouer avec une balle « instinctivement »
- Un objet afford un comportement à une personne. Ex: une boite à lettre
- Le comportement de quelqu’un afford le comportement à une autre personne. Ex: tendre la main

78
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
A) Les affordances correspondent à des mesures intrinsèques et non métriques (preuves chez les animaux)
l’affordance définit les propriétés en référence à notre organisme (conception très égocentrique)
- Palourdes: proies ou prédateurs des Buccins (Branch, 1979)
- Franchissement d’obstacle des grenouilles (Ingle et Cook, 1977)
- Attaque des mantes religieuses (Michael et al., 1985)

79
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
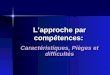
B) l’animal perçoit directement le coût énergétique de son comportement
- passage du pas –trot – galop (Hoyt et Taylor, 1981)

80
Passage Pas – Trot - Galop

81
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
B) l’animal perçoit directement le coût énergétique de son comportement
- passage du pas –trot – galop (Hoyt et Taylor, 1981)
- passage course - bondissement de gazelle Thompson

82
ml O
2 co
nsom
mé
pour
un
dépl
acem
ent d
e 2
m
Vitesse de déplacement
Bondissement
Course
4
8
12
Passage course - bondissement

83
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
C) l’être humain est il capable de percevoir directement l’environnement selon ses possibilités d’action (comme l’animal)?
- Preuve logique: Phylogénétiquement l’homme est un animal
Preuves ?

84
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
C) l’être humain est-il capable de percevoir directement l’environnement selon ses possibilités d’action (comme l’animal)?
- franchissement de marches d’escalier (Warren, 1984)
Preuves expérimentales

85
= E/S Ici Hmarche/Ljambe
= 0.88 = 0.88 jugement ET réalisation
JugementJugement et calculcalcul du point critiquefranchissable ou non?

86
CalculCalcul du point optimalquelle est la moins coûteuse?
= E/S Ici Hmarche/Ljambe
= 0.26= 0.26

87
JugementJugement du point optimalcoûteux ou pas ?
= E/S Ici Hmarche/Ljambe
= 0.25= 0.25 (calculé = 0.26)

88
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
C) l’être humain est il capable de percevoir directement l’environnement selon ses possibilités d’action (comme l’animal)
- franchissement de marches d’escalier (Warren, 1984)
Preuves expérimentales
- franchissement de porte
- franchissement d’obstacle (Cornus, 2000)
- appréciation du monde en fonction de l’âge
- passage marche - course (Diedrich et Warren, 1995)

89
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
D) Comment apparaissent les affordances ?
- par l’apprentissage pour les objets et les situations culturellesSi plusieurs utilités -> dépend de la situation
- dès la naissance (instinct de survie)Looming (Caroll et Gibson, 1981)Matelas d’eau (Gibson et al., 1987)

90
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
E) Exemples généraux d’affordance
- l’eau: plusieurs significations. Fonction de l’utilité du moment
- le terrain: il afford la locomotion si l’environnement est ouvert et l’arrêt s’il est fermé (barrière)
- les objets: généralement on qualifie les objets selon leurs propriétés et en fonction de ce qu’ils nous affordent - les personnes: comme les objets, on qualifie les individus en fonction de ce qu’ils nous affordent (type de relation sociale)

91
4.3. Les affordances4.3. Les affordances22èmeème postulat : sujet et environnement sont postulat : sujet et environnement sont indissociablesindissociables
4. Réponses de l’approche écologique au niveau perceptif
Conclusion sur les affordances
- l’affordance décrit la relation fonctionnelle entre l’animal et l’environnement
- le monde est perçu de façon égocentrique (référence intrinsèque)
- une affordance est invariante, elle est donc toujours perçue (perception plus économique)
- on ne peut pas percevoir toutes les caractéristiques d’un objet en même temps (couleur, matière etc…). On distingue d’abord l’affordance (son utilité)

92
Plan du cours1. Problèmes de l’approche cognitive au niveau moteur
2. Réponses de l’approche écologique au niveau moteur
3. Problèmes de l’approche cognitive au niveau perceptif
4. Réponses de l’approche écologique au niveau perceptif :
1. la perception directe
2. Le flux
3. Les affordances
5. Le couplage perception - action
6. Applications des différents modèles

93
5. 3éme postulat Le couplage perception - action
La perception et l’action sont toujours couplées!!
Comment mettre en relation la perception et l’action sans traitement ?
Puisque la perception et l’action sont directes, le couplageest lui aussi direct

94
Couplage perception - action
Perception
Action
Force Flux

95
5. 3éme postulat Le couplage perception - action
La perception et l’action sont toujours couplées!!
Comment mettre en relation la perception et l’action sans traitement ?
Puisque la perception et l’action sont directes, le couplageest lui aussi direct
Pour réaliser un geste il faut mettre en relation la perception (une variable visuelle) et l’action (une variable motrice): la loi la loi de contrôlede contrôle
Pour preuve, de nombreux neurophysiologistes tentent de trouver des relations entre neurones perceptifs et moteurs

96
5. 3éme postulat Le couplage perception - action
Les lois de contrôle
5.1. Définition d’une loi de contrôle
Toute variable optique (provenant de l’environnement) est enliaison avec un pattern d’action (variable motrice) appelé mode d’action
Un mode d’action est par exemple: - marcher, courir - shooter - lancer ect…

97
5. 3éme postulat Le couplage perception - action
Les lois de contrôle
5.1. Définition d’une loi de contrôle
On ne contrôle pas le mode d’action. Ce n’est que le résultat visible
Le SNC contrôle qu’un (petit nombre de) degré de liberté (coordination par exemple) appelé paramètre libreparamètre libre (Warren 1990)
Mais attention: le paramètre libre est contrôlé par le système nerveux périphérique (pas de représentation ni de traitement).

98
Couplage perception - action
Perception(affordance)
Action(mode d’action)
Force(Paramètre libre)
Flux

99
5. 3éme postulat Le couplage perception - action
Les lois de contrôle
5.2. Formalisation d’une loi de contrôle
Flux = f(force)
Flux = Fext + Fint
(flux)= Fint (flux) = paramètre libre
Variable perceptiveflux
Variable motriceParamètre libre

100
5. 3éme postulat Le couplage perception - action
Les lois de contrôle
5.3. Exemples de lois de contrôle
Pointage d’une cible en courant (saut en longueur) mg = (flux)= Fint
- réguler l’impulsion verticale
Attraper une balle en bougeant la main latéralement
Xb – Xm)/ = X (flux)= Fint
- réguler la vitesse de la main

101
5. 3éme postulat Le couplage perception - action
Les lois de contrôle
5.3. Exemples de lois de contrôle
Se déplacer vers un butcentre d’expansion= but visé (flux)= Fint

102
Se déplacer vers un but:Le centre de l’expansion optique doit se trouver sur le but visé

4s 103
5. 3éme postulat Le couplage perception - action
Les lois de contrôle
5.3. Exemples de lois de contrôle
Se déplacer vers un butcentre d’expansion= but visé (flux)= Fint
Intercepter une balle en volannuler l’accélération optique verticale
Intercepter un objet à vitesse constanteannuler l’accélération optique horizontale

104
5. 3éme postulat Le couplage perception - action
Les lois de contrôle
5.4. Le contrôle est donc toujours en continu
Pour des gestes lents, toute la communauté scientifique est d’accord (même les cognitivistes)
Pour les gestes rapides, il y a aussi contrôle en continu:
- tennis de table (Bootsma, 1991)
- salto arrière (Bardy et Laurent, 1998)
La seule partie qui est difficilement contrôlable c’est l’inertie du geste

105
5. 3éme postulat Le couplage perception - action
Les lois de contrôle
5.5. L’apprentissage
Apprendre c’est trouver la loi de contrôle adéquate
L’élève (le sportif) passe par trois étapes
1. Trouver la bonne loi (quel paramètre libre et quelle variable perceptive)
2. Apprendre à adapter cette loi de contrôle aux diverses situations
3. Apprendre à optimiser cette loi et être capable d’en faire une affordance (percevoir cette possibilité d’action)

106
Conclusion sur l’approche écologique
La perception est directe:- tout est contenu dans le flux- c’est dans le changement qu’on perçoit- on perçoit nos possibilités d’action critique et optimale (affordance)
L’action est directe:- le SNC supérieur définit l’intention de l’action- le SN périphérique contrôle le paramètre libre
La perception et l’action sont couplées:- on contrôle tout en continu par l’intermédiaire d’une loi de contrôle- chaque variation d’une variable perceptive modifie une variable motrice et vice-versa

107
Plan du cours1. Problèmes de l’approche cognitive au niveau moteur
2. Réponses de l’approche écologique au niveau moteur
3. Problèmes de l’approche cognitive au niveau perceptif
4. Réponses de l’approche écologique au niveau perceptif :
1. la perception directe
2. Le flux
3. Les affordances
5. Le couplage perception - action
6. Applications des différents modèles

108
6. Applications des différents modèles
6.1. Approche cognitive
A) Problèmes à résoudre pour l’élève
- l’élève doit optimiser les processus de traitement de l’information pour déclencher et contrôler le geste adéquat
Traiter l’information pour la perception et l’action

109
6. Applications des différents modèles
6.1. Approche cognitive
A) Problèmes à résoudre pour l’élève
- l’élève doit optimiser les processus de traitement de l’information pour déclencher et contrôler le geste adéquat
- Il doit construire un schéma moteur (une représentation de son geste)
Il faut construire une représentation de la perception et de l’action

110
6.1. Approche cognitive (suite)
B) Rôle de l’enseignant
- Décomposer la tâche en but et sous buts (définir une représentation)

111
6.1. Approche cognitive (suite)
B) Rôle de l’enseignant
- Décomposer la tâche en but et sous buts (définir une représentation)
- Donner le maximum d’information avant, pendant et après le mouvement (mise en relation de la représentation, des résultats et des moyens utilisés)

112
6.2. Approche écologique
A) Problèmes à résoudre pour l’élève
- Il apprend à détecter l’information pertinente et le paramètre libre

113
6.2. Approche écologique
A) Problèmes à résoudre pour l’élève
- Il apprend à détecter l’information pertinente et le paramètre libre
- Il découvre la loi de contrôle (relation entre l’information pertinente et le paramètre libre)

114
6.2. Approche écologique (suite)
B) Rôle de l’enseignant
- Aménager l’environnement pour que l’élève découvre l’information pertinente et le paramètre libre à contrôler

115
6.2. Approche écologique (suite)
B) Rôle de l’enseignant
- Aménager l’environnement pour que l’élève découvre l’information pertinente et le paramètre libre à contrôler
- Faire varier les liens entre la perception et l’action pour explorer la loi de contrôle

116
6.3. Implications didactiques: exemples pratiques
À l’aide de 3 exemples d’apprentissage, voyons comment un « cognitiviste » et un « écologiste » enseigneraient le même geste
Prenons l’exemple de l’apprentissage- du salto avant
- du « griffé » en sprint
Prenons l’exemple d’une correction- de dissymétrie en natation

117
Apprentissage du salto avant
• 1. Approche cognitive

118
Apprentissage du salto avant
• 1. Approche cognitive– Séquentialiser le geste (parcours sur les
différentes parties du geste)– Explication verbale

119
Apprentissage du salto avant
• 1. Approche cognitive– Séquentialiser le geste (parcours sur les
différentes parties du geste)– Explication verbale
• 2. Approche écologique– Aménagement du matériel: hauteur, impulsion
et rotation à l’aide de gros tapis

120
Apprentissage du « griffé »
• 1. Approche cognitive– Exercices de jambe et de positionnement du
pied– Explication verbale

121
Apprentissage du « griffé »
• 1. Approche cognitive– Exercices de jambe et de positionnement du
pied– Explication verbale
• 2. Approche écologique– Mise en place de lattes basses à une distance
rapprochée

122
Correction de la dissymétrie en natation
• 1. Approche cognitive– Différent travail des jambes et des bras– Explication verbale

123
Correction de la dissymétrie en natation
• 1. Approche cognitive– Différent travail des jambes et des bras– Explication verbale
• 2. Approche écologique– Sur-vitesse pour la brasse lors de dissymétries et de
mauvaises (ou aucune) utilisations des jambes ou problèmes de synchronisation entre les bras et les jambes
– Sous-vitesse pour le travail d’appui des bras en crawl (augmente la fréquence qui fait émerger coordination en opposition ou en superposition)

124
Quelques références bibliographiques
Aratyunyan, G.H., Gurfinkel, V.S., & Mirsky, M.L. (1969). Investigation at aiming to a target. Biophysics, 13, 536-538
Bernstein, N.A. (1967). The co-ordination and regulation of movements. Oxford: Pergamon Press
Buekers, M. J. (1999). L’acquisition des habiletés sportives dans un contexte écologique. Revue EPS, 277 : 73.
Delignières, D. (1998). Apprentissage moteur. Quelles idées neuves. Revue EPS n°247, 61-66
Laurent, M. & Temprado, J.J. (1996). Apprentissage et contrôle du mouvement dans les APS. Quelle(s) théorie(s) pour quelle(s) pratique(s). In Recherche et Pratique de APS, Dossiers EPS n°28, 67-77, Paris: Revue EPS
Newell, K.M. (1986). Constraints on the development of coordination. In M.G. Wade et H.T.A Whiting (eds.), Motor Development in Children: Aspects of Coordination and Control (p. 341-371). Dordrecht: Martinus Nijhoff

125
Quelques références bibliographiques
Temprado, J.J. (1999). « l’approche dynamique »: une autre façon de concevoir l’apprentissage moteur en EPS. Revue EPS n° 277, 74-75
Temprado, J. J., & Montagne, G. (2001). Les coordinations perceptivo-motrices. Introduction aux approches écologique et dynamique du couplage perception-mouvement. Paris : Armand Colin.
Temprado, J. J., & Laurent, M. (1995). Approches cognitive et écologique de l’apprentissage des habiletés motrices en sport. In H. Ripoll, J. Bilard, M. Durand, J. Keller, M. Levêque, & P. Therme (Eds.), Psychologie du sport. Questions actuelles (pp. 223-236). Paris : Editions Revue EPS.
Temprado, J. J., Della-Grasta, M., Farell, M., & Laurent, M. (1997). A novice-expert comparison of (intra-limb) coordination subserving the volley-ball serve. Human Movement Science, 16,653-676
Von Holst (1937/1973). The behavioral physiology of animal and man. Coral Gables, FL: University of Miami Press