Embed Size (px)
Citation preview
13: DEFORMABLE OBJECT SIMULATION10/03/2015
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
2 DEFORMABLE OBJECTS
Generalization of rigid body physics
Soft bodies e.g. plastic/elastic deformations, character animation
Fracture and destruction
Fluid simulation e.g. liquids, gases
Still an open problem:
Lots of specific solutions
No single accepted general best method
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

APPLICATIONS

4 DEFORMATIONS IN PHYSICS ENGINES
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
5 PHYSICS IN UNREAL ENGINE 3“POWERED BY NVIDIA PHYSX”
See: http://www.unrealengine.com/features/physics/GDC 2008 Tech Demo: http://www.youtube.com/watch?v=-m4pe6UAS2M
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

6 PHYSICS IN CRY ENGINE 3
GDC 2010 Tech Demo (from gametrailers):http://www.gametrailers.com/video/gdc-10-cryengine-3/63096
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
7 GTC 2010: PHYSICS FLUID SIMULATION
Physics Demo Shows Off Water Simulation on 1 GPU - GTC 2010 http://www.youtube.com/watch?v=1JrM4ujLY_AHybrid solver, based on heightfiled fluids and particles
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

8 MAIN CHALLENGES
Fewer global assumptions means limited pre-computation
E.g. Centre-of Mass, Inertia Tensor, Dynamics Proxies
More complex and lower level data structures
Larger dependence on geometry
Local vs. global models of object behaviour
Higher dimensional equations of motion: PDE’s vs ODE’s
More issues of stability
Computationally more expensive
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
9 SOLUTIONS FROM ENGINEERING
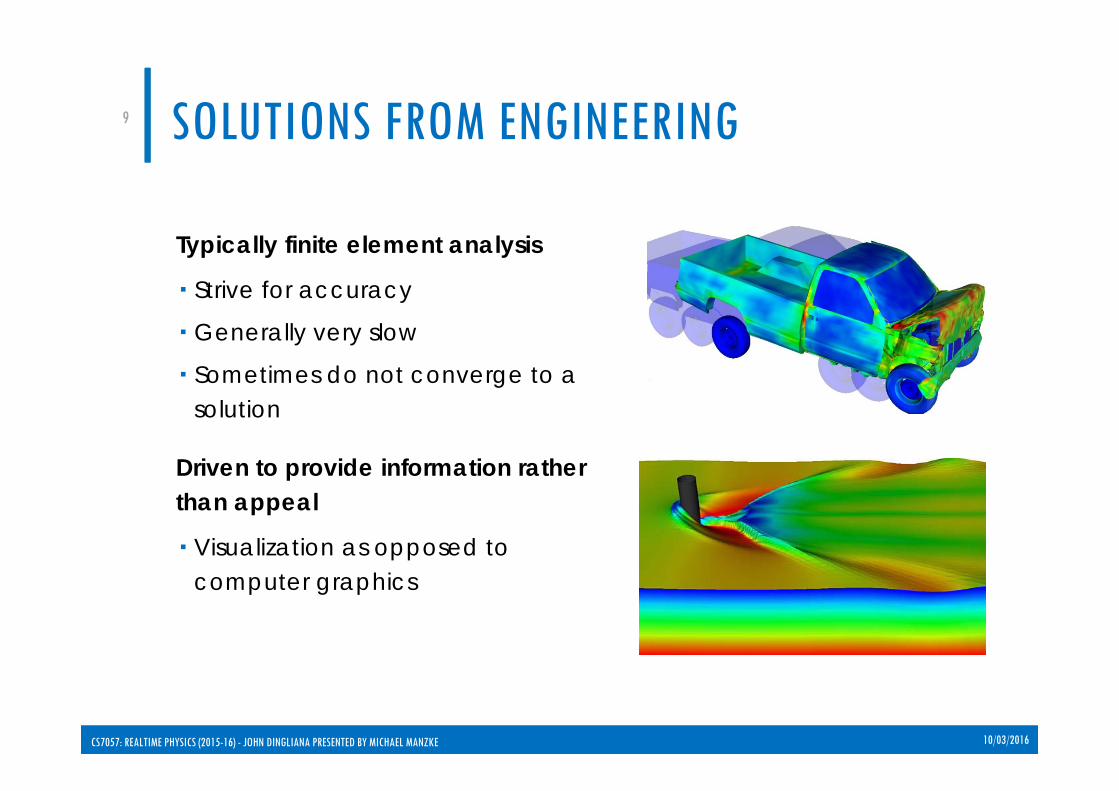
Typically finite element analysis
Strive for accuracy
Generally very slow
Sometimes do not converge to a solution
Driven to provide information rather than appeal
Visualization as opposed to computer graphics
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
10 SOLUTIONS FROM ANIMATION
e.g. Special effects in movies and commercials
Focus on appeal: accuracy not as crucial as in engineering
Faster solutions than engineering, but driven more by complexity than interactivity
Although there is increasing demand for proto-type “previs”
Often require “directable” simulations
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

11 KEY REQUIREMENTS OF REAL-TIME PHYSICS
Efficiency:
Interactive responses required Low latency: Minimum frequency constraints: Visual (20fps) and haptic (1kHz) N.B. Most of the time used in the rendering process (especially in games).
Also resource (e.g. Memory) and power efficiency
Stability:
Should guarantee robustness: unsupervised simulation process If the model blows up we lose immersion
Simplicity
Ease of implementation Resource availability reproducability
Realism:
Plausibility vs. accuracy Interactivity vs. accuracy
contrary to the belief that performance is the single overriding factor in the evaluation of research by game developers, the most important factors are, in this order:1.robustness2.simplicity3.Performance- Chris Hecker “A Game Developer’s Wish List for Researchers”http://chrishecker.com/A_Game_Developer%27s_Wish_List_for_Researchers
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
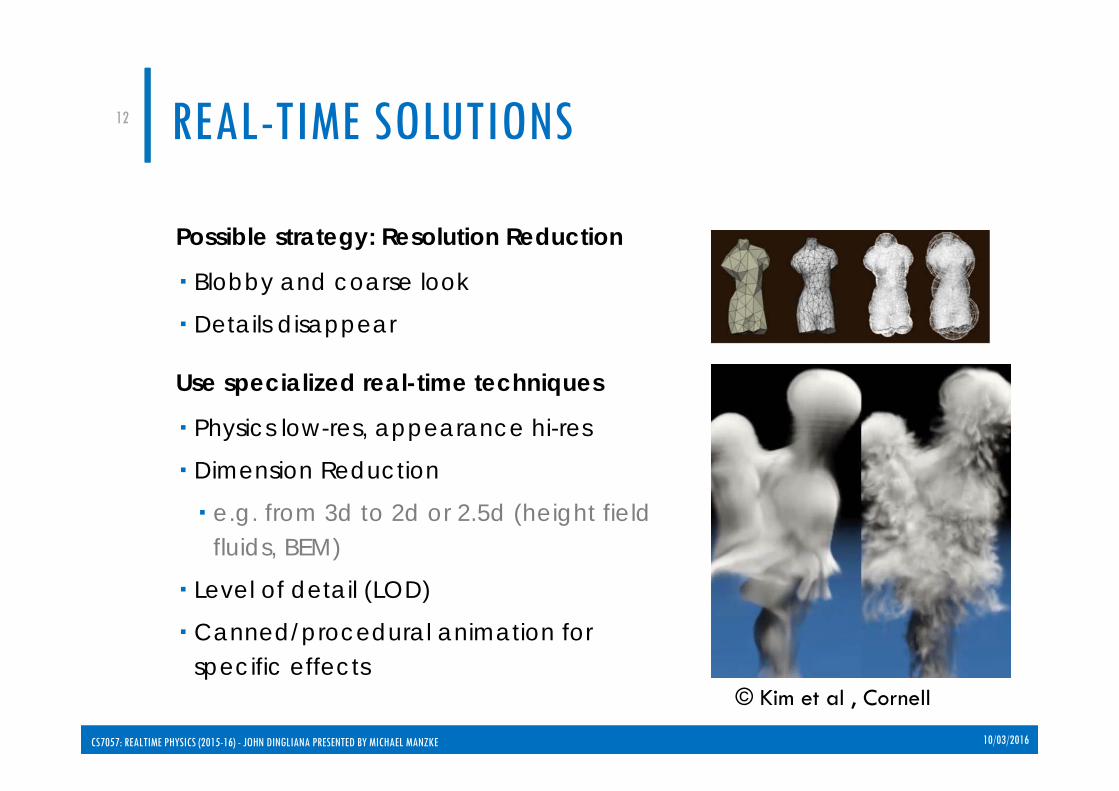
12 REAL-TIME SOLUTIONS
Possible strategy: Resolution Reduction
Blobby and coarse look
Details disappear
Use specialized real-time techniques
Physics low-res, appearance hi-res
Dimension Reduction
e.g. from 3d to 2d or 2.5d (height field fluids, BEM)
Level of detail (LOD)
Canned/procedural animation for specific effects
© Kim et al , Cornell
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

13 DEFORMABLE SIMULATION TECHNIQUES
Rigid Body Dynamics is almost completely solved
However there are MANY alternatives for deformable objects
Different systems cater for specific application
None can easily be considered better than others
We can categorise techniques based on:
Type of phenomena they simulate
Formulation of the solution
Space Discretization method
Time Discretization method
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
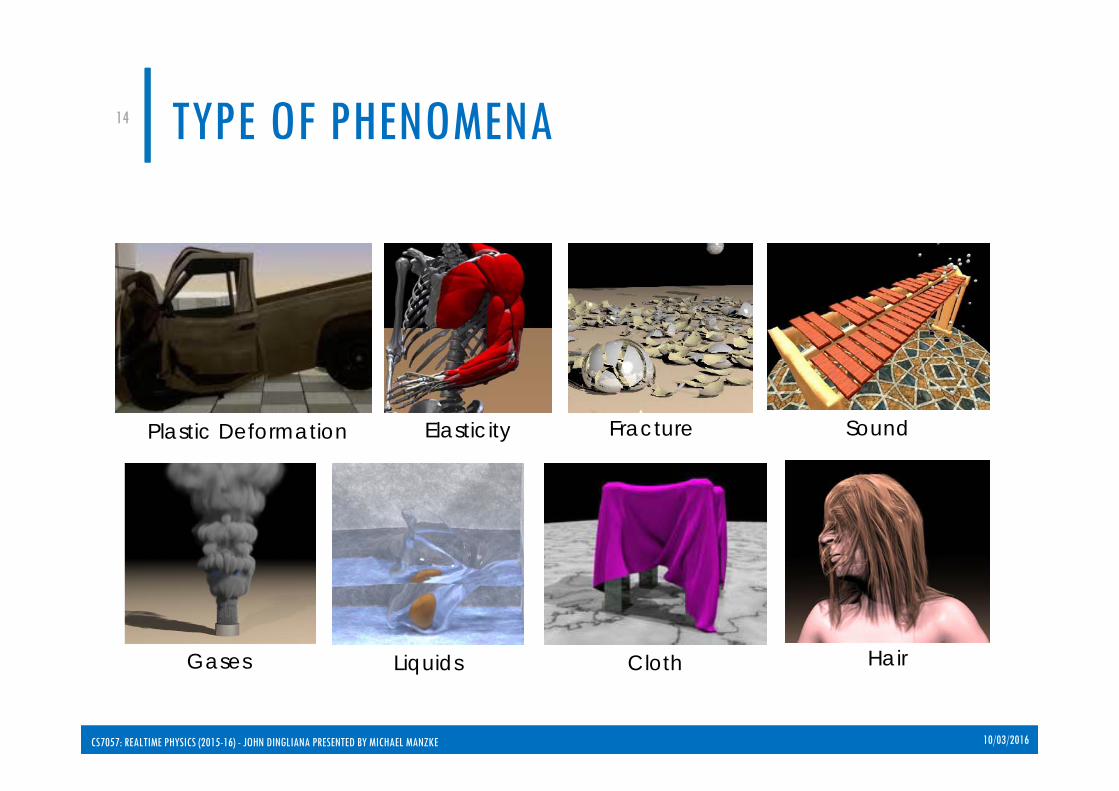
14 TYPE OF PHENOMENA
Plastic Deformation Elasticity Fracture Sound
Gases Liquids Cloth Hair
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
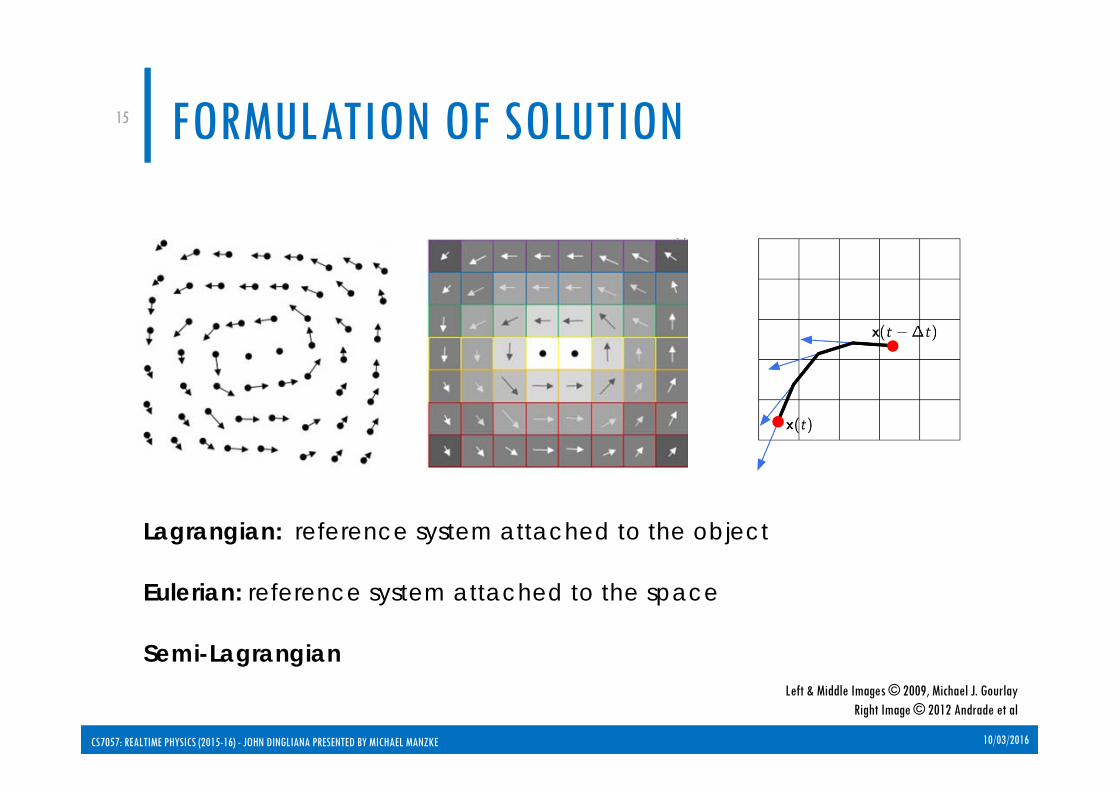
15 FORMULATION OF SOLUTION
Lagrangian: reference system attached to the object
Eulerian: reference system attached to the space
Semi-LagrangianLeft & Middle Images © 2009, Michael J. Gourlay
Right Image © 2012 Andrade et al
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
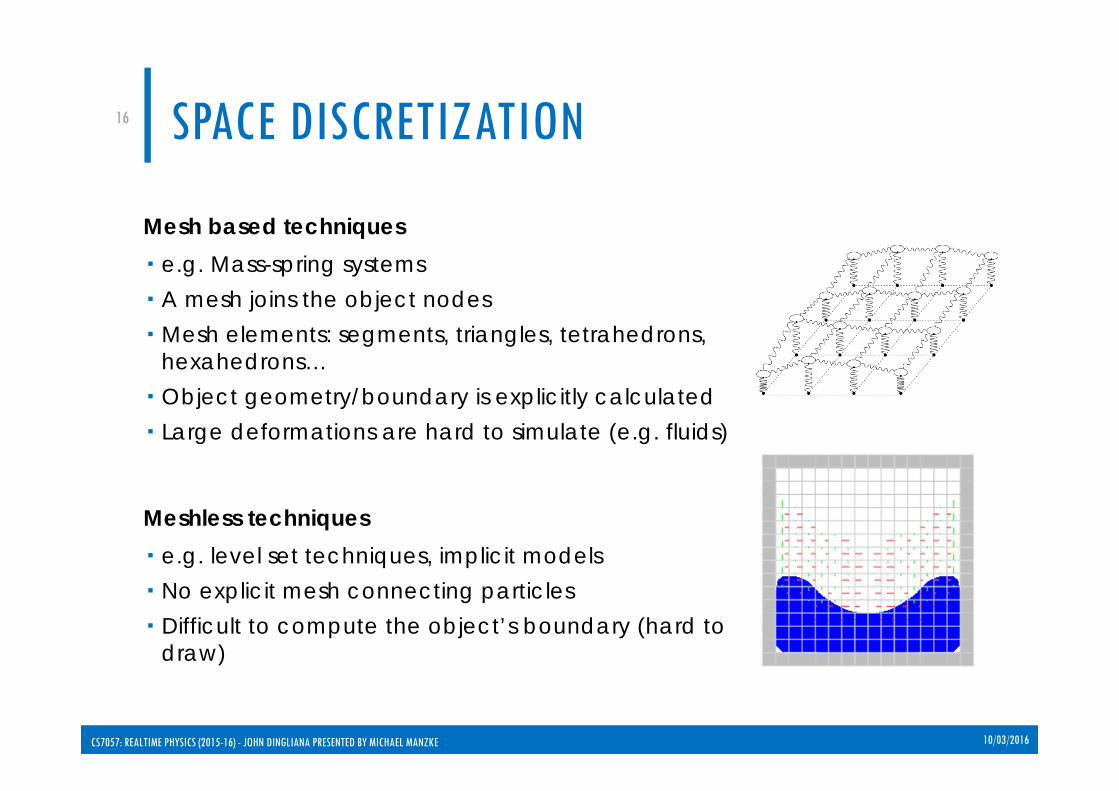
16 SPACE DISCRETIZATION
Mesh based techniques e.g. Mass-spring systems A mesh joins the object nodes Mesh elements: segments, triangles, tetrahedrons,
hexahedrons… Object geometry/boundary is explicitly calculated Large deformations are hard to simulate (e.g. fluids)
Meshless techniques e.g. level set techniques, implicit models No explicit mesh connecting particles Difficult to compute the object’s boundary (hard to
draw)
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
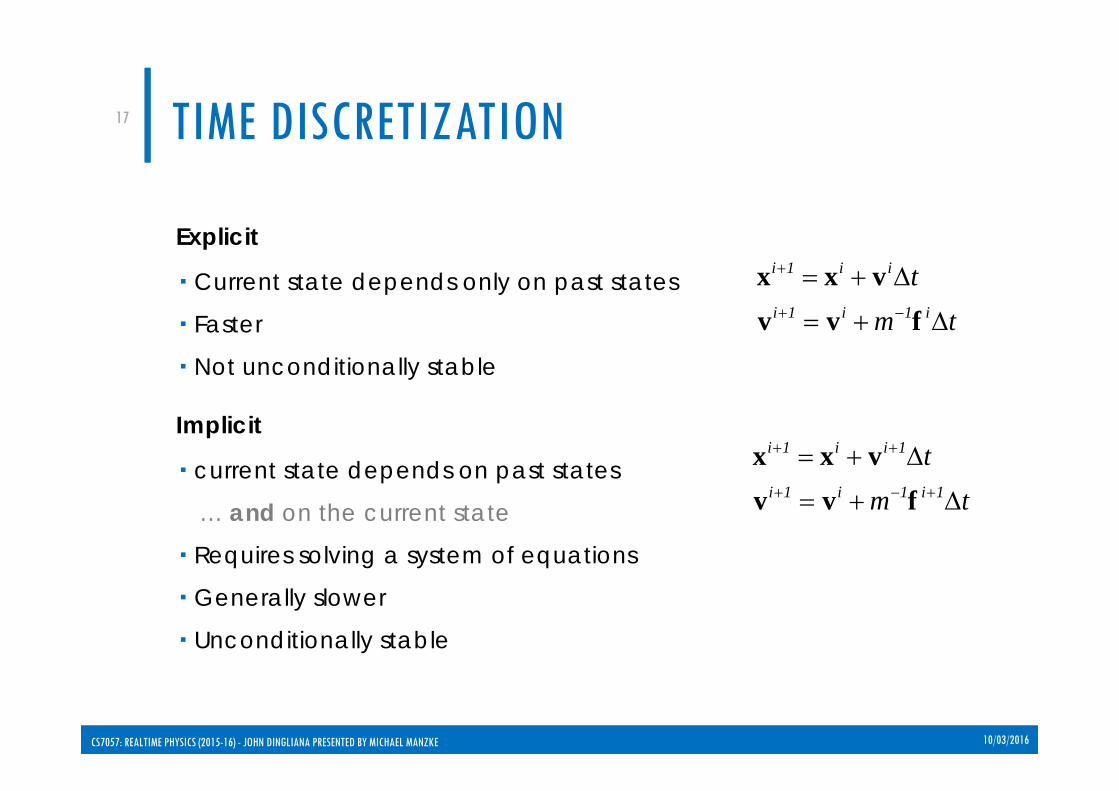
17 TIME DISCRETIZATION
Explicit
Current state depends only on past states
Faster
Not unconditionally stable
Implicit
current state depends on past states
… and on the current state
Requires solving a system of equations
Generally slower
Unconditionally stable
tmt
1i1i1i
1ii1i
fvvvxx
tmt
i1i1i
ii1i
fvvvxx
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

MODELLING DEFORMATIONS
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
19 SOFT BODY DYNAMICS
Visually Realistic physical simulations of motion and properties of deformable solids
Shape and/or topology of objects changes
Points within the object move relative to one another
Solids have tendency to retain their shape to some degree
elastic vs plastic deformations
Examples:
Shape deformations: muscle, fat, hair, plants, clothing and fabric
Also partially deformable objects: no change in topology
Skinned hierarchies
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

20 GEOMETRIC DEFORMATIONS
Locally specified deformation by local/tangent transformations
Can be used for e.g. twisting, bending, tapering
now mainstream in modelling tools e.g. 3DS Max
Alan H. Barr, Global and Local Deformations of Solid Primitives, Computer Graphics (Proceedings of SIGGRAPH 84). 18(3), pp. 21-30, 1984.
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
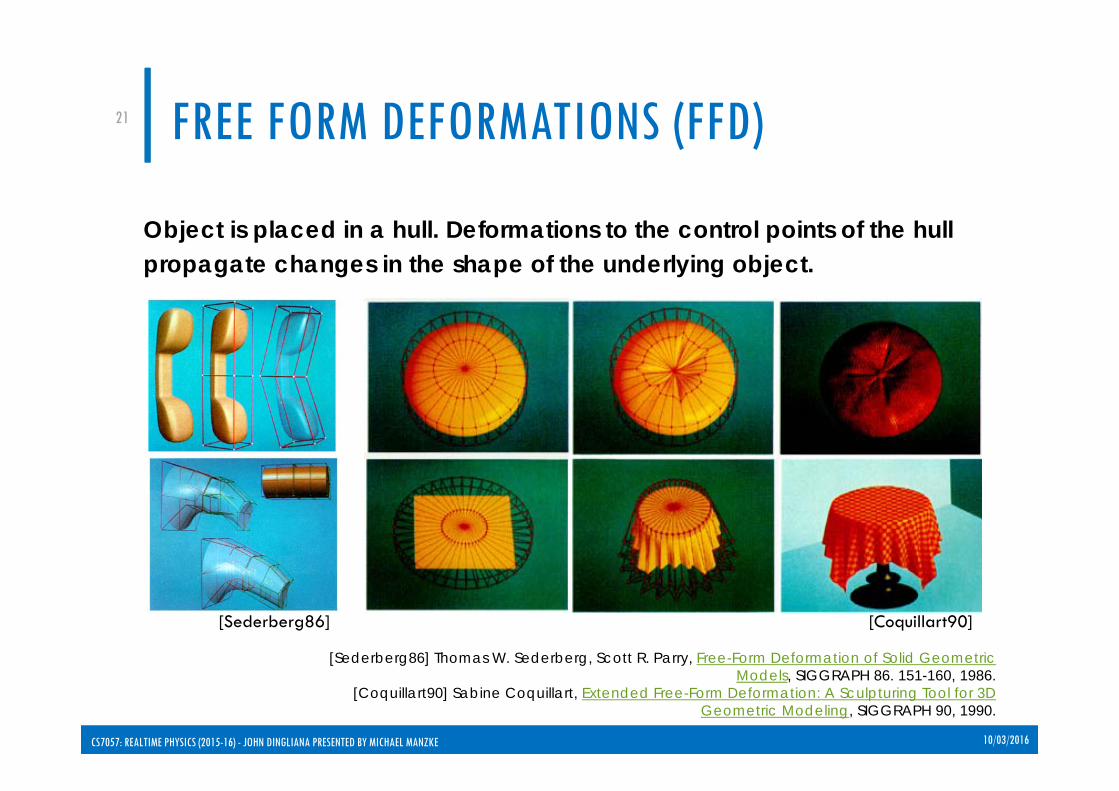
21 FREE FORM DEFORMATIONS (FFD)
Object is placed in a hull. Deformations to the control points of the hull propagate changes in the shape of the underlying object.
[Sederberg86]
[Sederberg86] Thomas W. Sederberg, Scott R. Parry, Free-Form Deformation of Solid Geometric Models, SIGGRAPH 86. 151-160, 1986.
[Coquillart90] Sabine Coquillart, Extended Free-Form Deformation: A Sculpturing Tool for 3D Geometric Modeling, SIGGRAPH 90, 1990.
[Coquillart90]
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
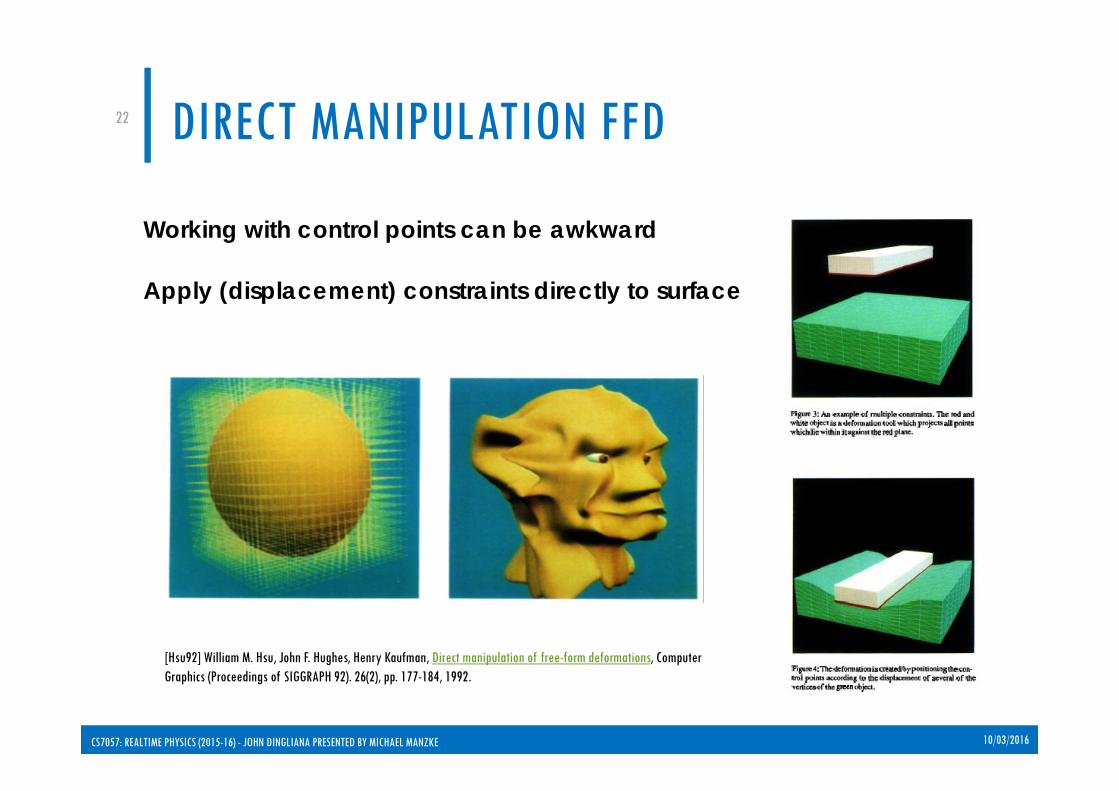
22 DIRECT MANIPULATION FFD
Working with control points can be awkward
Apply (displacement) constraints directly to surface
[Hsu92] William M. Hsu, John F. Hughes, Henry Kaufman, Direct manipulation of free-form deformations, Computer Graphics (Proceedings of SIGGRAPH 92). 26(2), pp. 177-184, 1992.
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
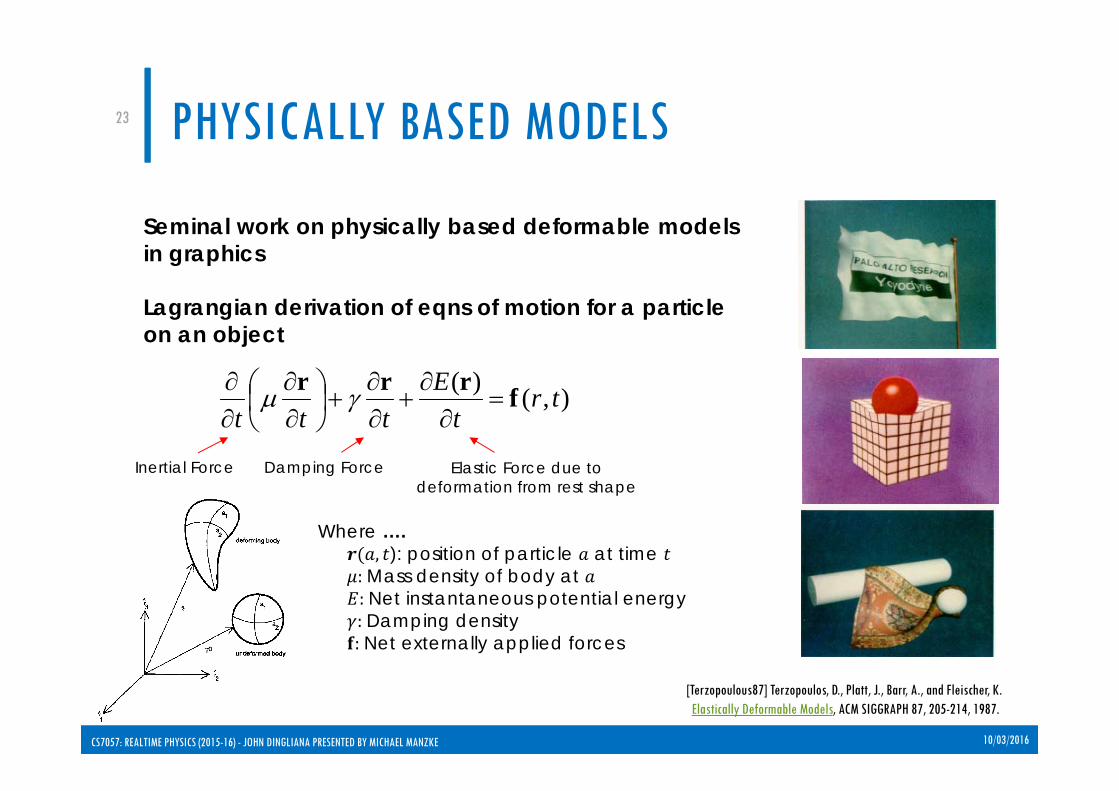
23 PHYSICALLY BASED MODELS
Seminal work on physically based deformable models in graphics
Lagrangian derivation of eqns of motion for a particle on an object
),()( trt
Ettt
frrr
Where …., ): position of particle at time
:Mass density of body at :Net instantaneous potential energy:Damping density:Net externally applied forces
[Terzopoulous87] Terzopoulos, D., Platt, J., Barr, A., and Fleischer, K.Elastically Deformable Models, ACM SIGGRAPH 87, 205-214, 1987.
Inertial Force Damping Force Elastic Force due to deformation from rest shape
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
DEFORMABLE SIMULATION: COMMON PRINCIPLES
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
25 DEFORMABLE PROPERTIES
Stress: within a solid object is the magnitude of force applied on an object divided by the surface area over which it acts
Strain: the fractional deformation caused by stress
Elasticity: Tendency of a body to return to its original shape after the forces causing deformation are removed
Opposite of plasticity: tendency to undergo permanent deformation due to forces
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
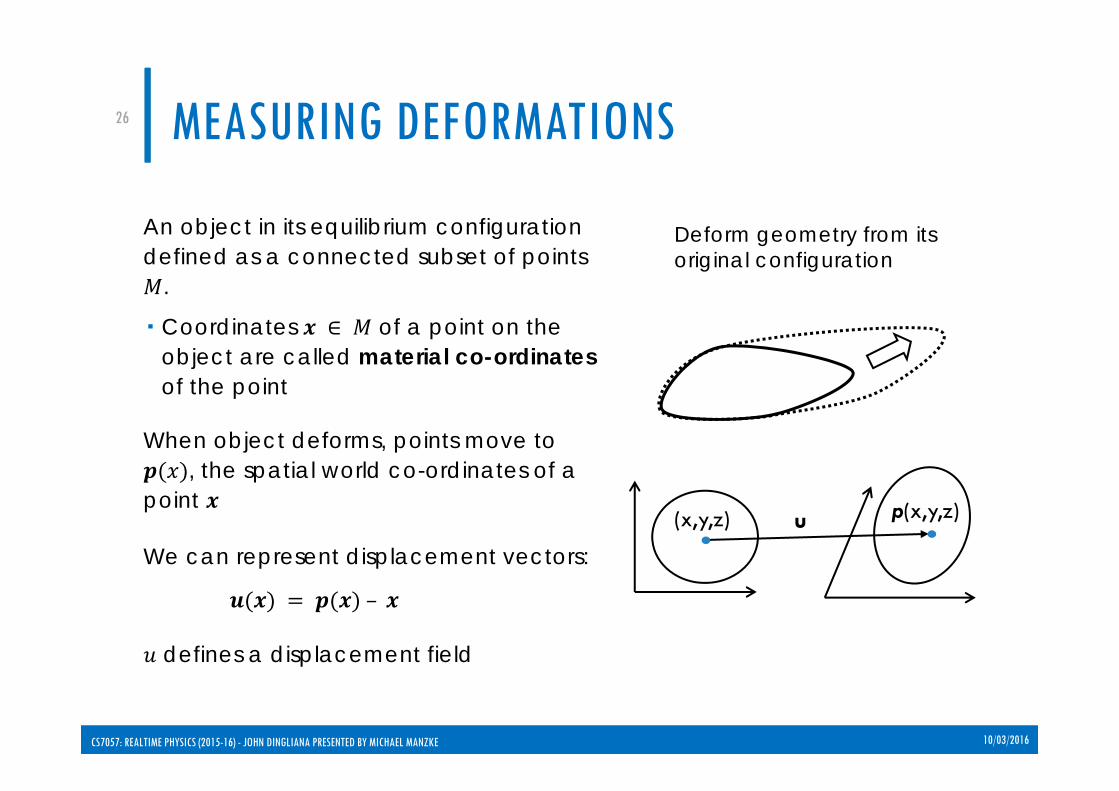
26 MEASURING DEFORMATIONS
An object in its equilibrium configuration defined as a connected subset of points
.
Coordinates ∈ of a point on the object are called material co-ordinatesof the point
When object deforms, points move to , the spatial world co-ordinates of a
point
We can represent displacement vectors:
–
defines a displacement field
(x,y,z) p(x,y,z)
Deform geometry from its original configuration
u
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

27 MEASURING DEFORMATIONS
Rotation and translation are solid movements and not deformations –spatially constant displacement field
Relative movement of point with respect to its neighbours
In 3D, the displacement function has 3 components, , , , , , , ,
Natural Shape Rigid Body Motion –Zero Energy
Small Deformation – Low Energy
Large Deformation – High Energy
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
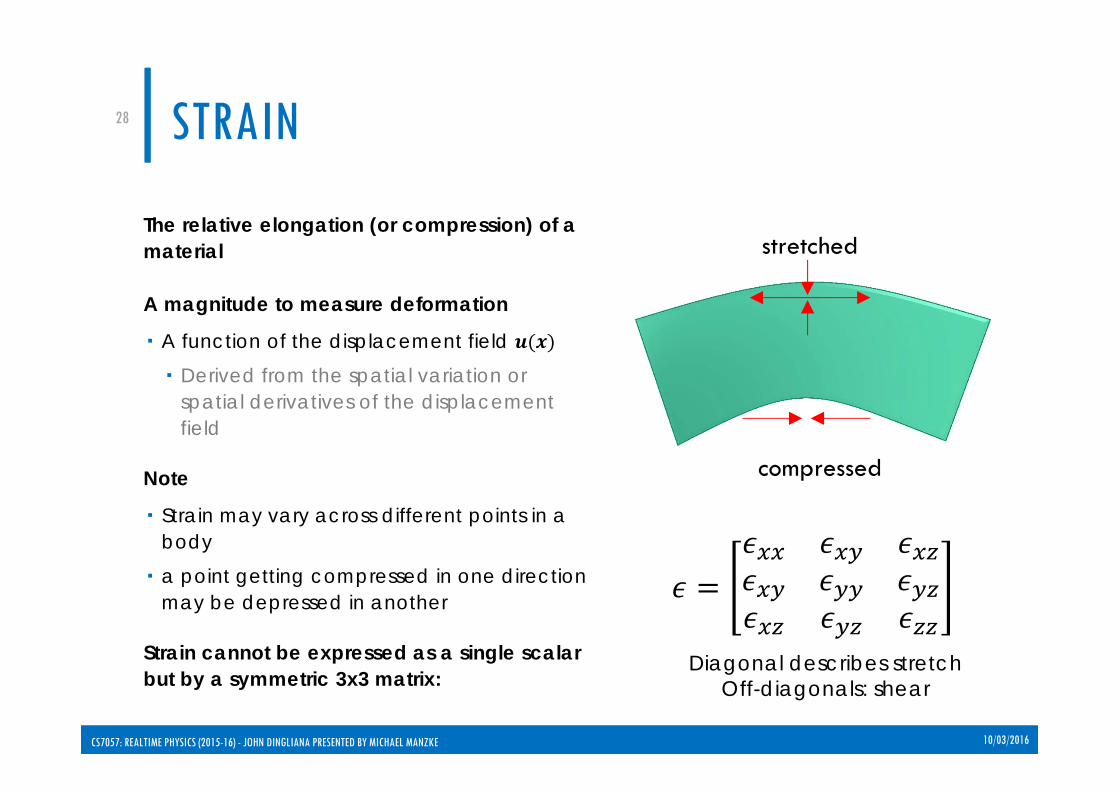
28 STRAIN
The relative elongation (or compression) of a material
A magnitude to measure deformation
A function of the displacement field
Derived from the spatial variation or spatial derivatives of the displacement field
Note
Strain may vary across different points in a body
a point getting compressed in one direction may be depressed in another
Strain cannot be expressed as a single scalar but by a symmetric 3x3 matrix:
stretched
compressed
Diagonal describes stretchOff-diagonals: shear
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
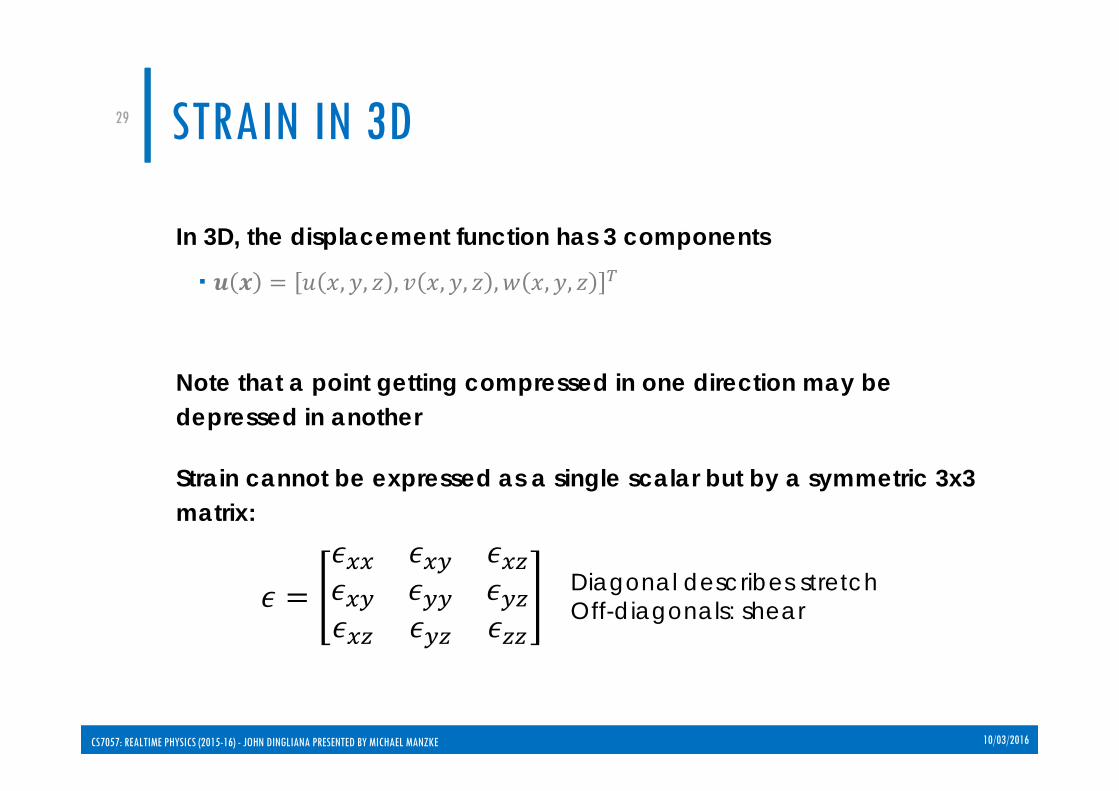
29 STRAIN IN 3D
In 3D, the displacement function has 3 components
, , , , , , , ,
Note that a point getting compressed in one direction may be depressed in another
Strain cannot be expressed as a single scalar but by a symmetric 3x3 matrix:
Diagonal describes stretchOff-diagonals: shear
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
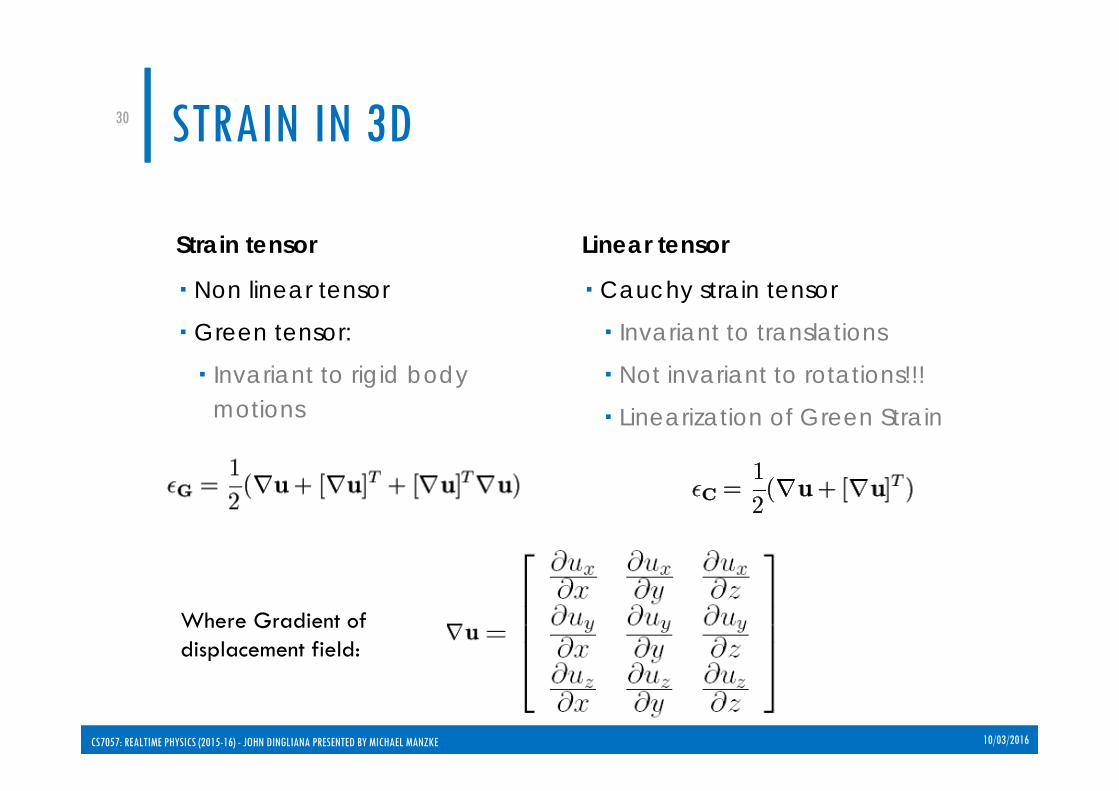
30 STRAIN IN 3D
Strain tensor
Non linear tensor
Green tensor:
Invariant to rigid body motions
Linear tensor
Cauchy strain tensor
Invariant to translations
Not invariant to rotations!!!
Linearization of Green Strain
Where Gradient of displacement field:
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
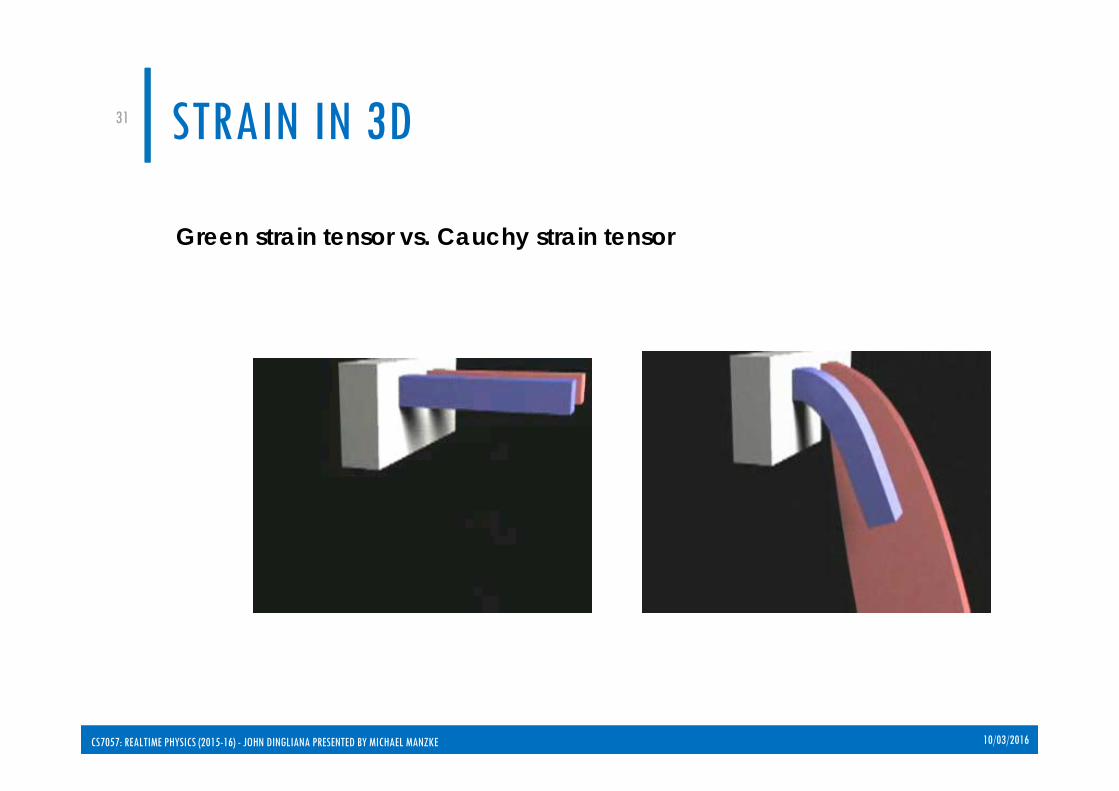
31 STRAIN IN 3D
Green strain tensor vs. Cauchy strain tensor
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
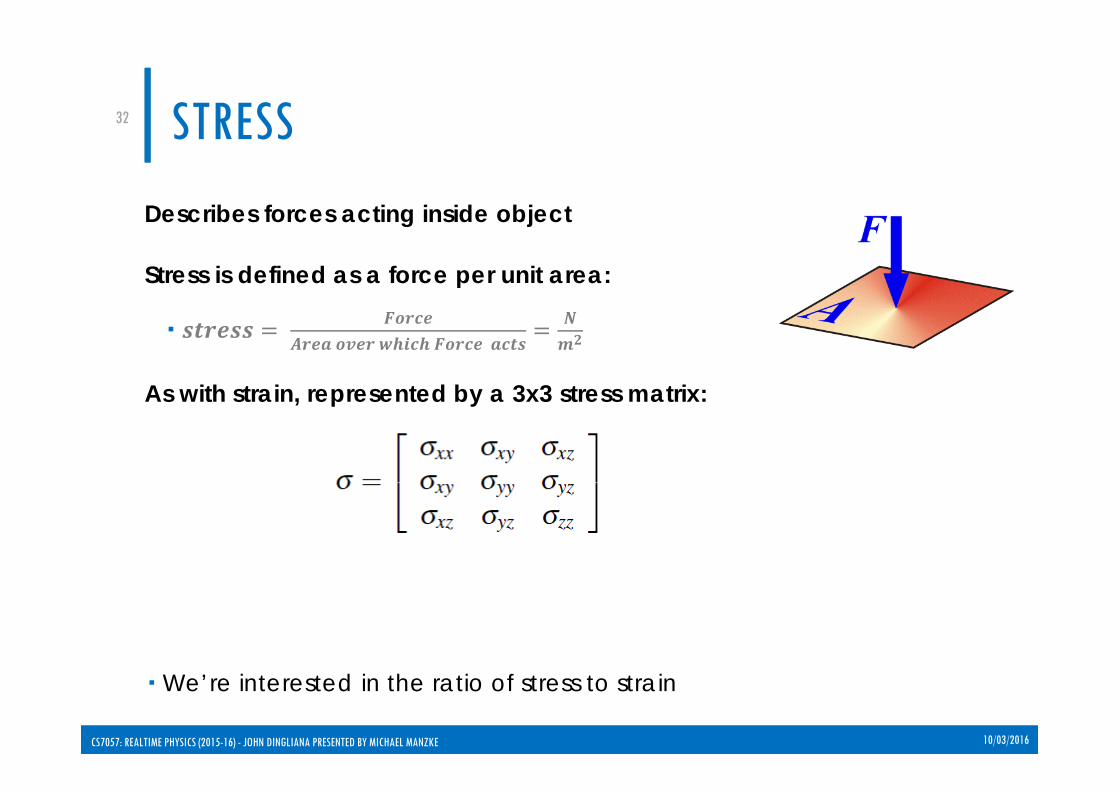
32 STRESSDescribes forces acting inside object
Stress is defined as a force per unit area:
As with strain, represented by a 3x3 stress matrix:
We’re interested in the ratio of stress to strain
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

33 LINEAR STRAIN
A force F acts on a wire with cross-sectional radius
If ∆ is change in length
Young’s modulus ( ) gives the ratio of stress to strain
A.k.a Elasticity Tensor
Units: /
/∆ /
This is really Hooke’s Law: Extension of spring is proportional to force acting on it
L L
AC
F
(From wikipedia)
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
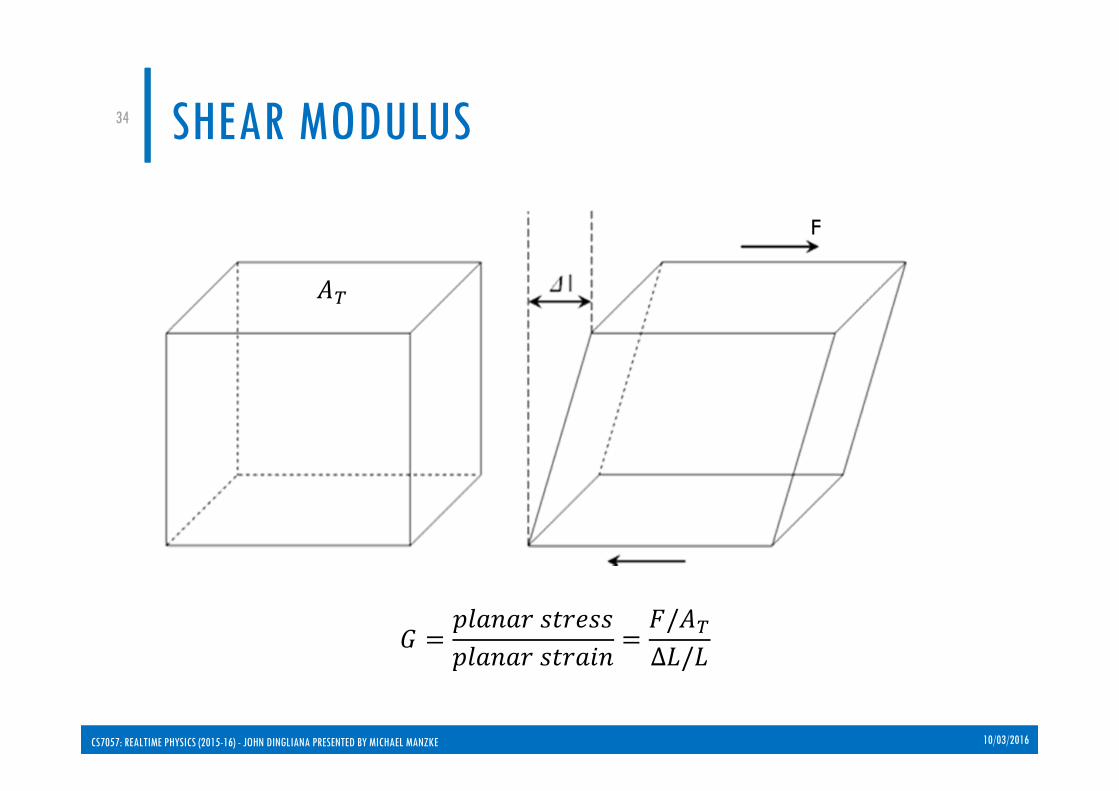
34 SHEAR MODULUS
F
/∆ /
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
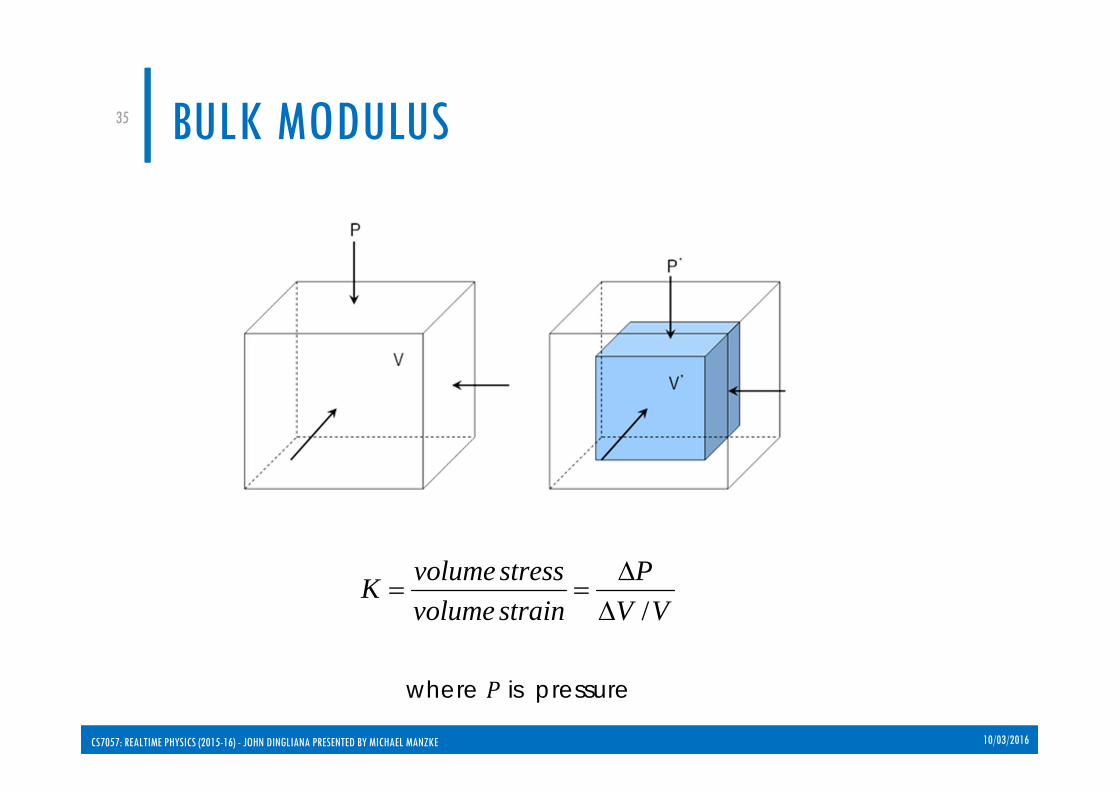
35 BULK MODULUS
VVP
strainvolumestressvolumeK
/
where is pressure
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

36 POISSON RATIO
For homogeneous isotropic materials E, G, K are related by:
2 1 3 1 2
where (Poisson's ratio for the material) gives the relationship between expansion and compression of a particular material
Poisson Effect: a body compressed in one direction tends to expand in the other two directions
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
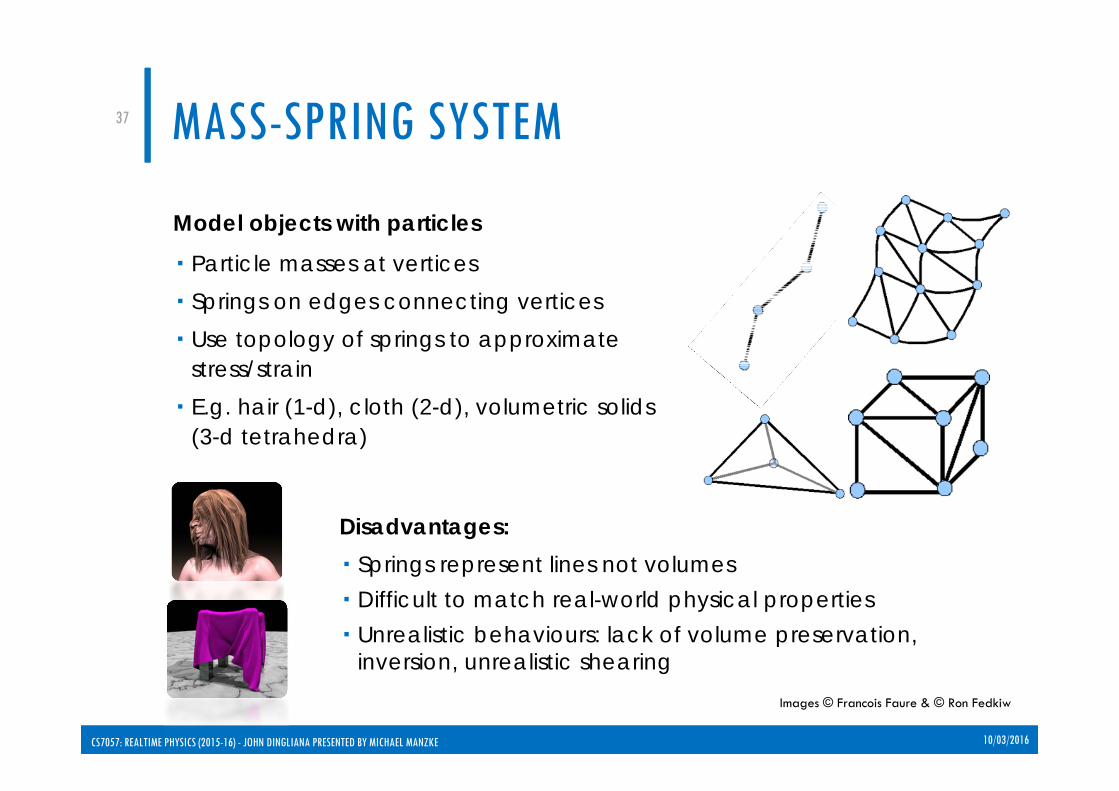
37 MASS-SPRING SYSTEM
Model objects with particles
Particle masses at vertices Springs on edges connecting vertices Use topology of springs to approximate
stress/strain E.g. hair (1-d), cloth (2-d), volumetric solids
(3-d tetrahedra)
Disadvantages: Springs represent lines not volumes Difficult to match real-world physical properties Unrealistic behaviours: lack of volume preservation,
inversion, unrealistic shearingImages © Francois Faure & © Ron Fedkiw
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
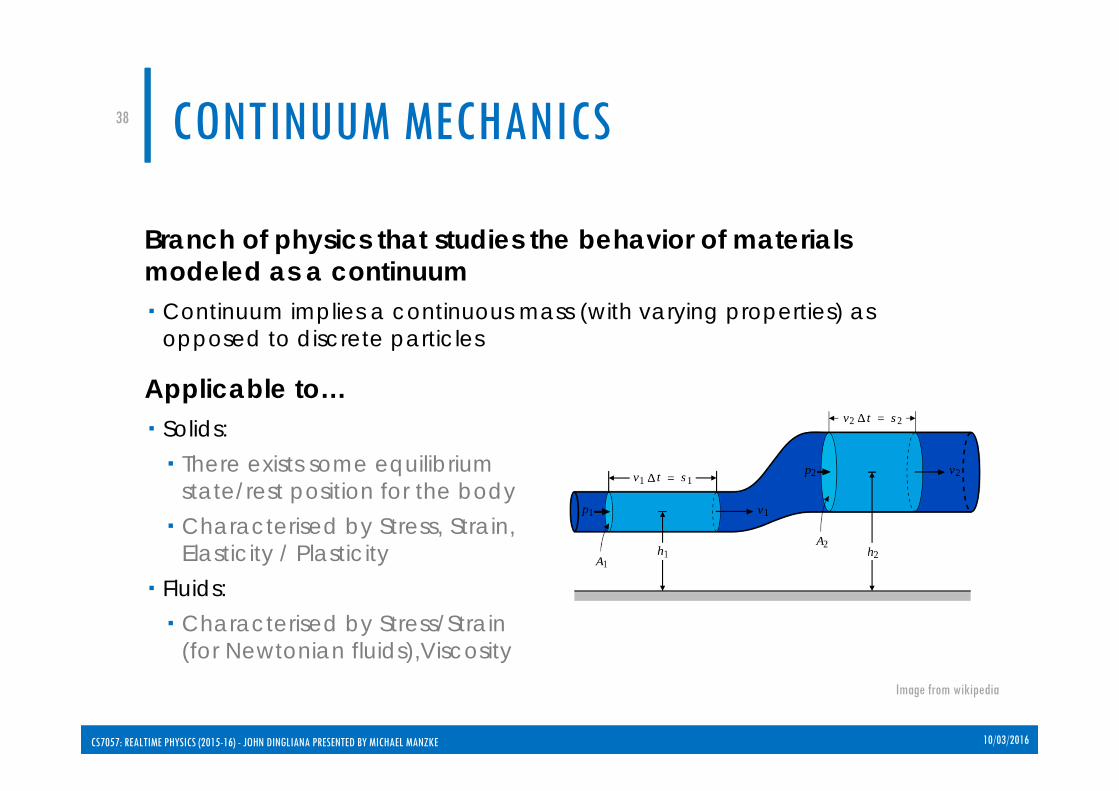
38 CONTINUUM MECHANICS
Branch of physics that studies the behavior of materials modeled as a continuum Continuum implies a continuous mass (with varying properties) as
opposed to discrete particles
Applicable to… Solids: There exists some equilibrium
state/rest position for the body Characterised by Stress, Strain,
Elasticity / Plasticity Fluids: Characterised by Stress/Strain
(for Newtonian fluids),Viscosity Image from wikipedia
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE

39 FINITE ELEMENT SIMULATION
A popular technique in physics and engineering: Objects are modelled as a three-dimensional elastic continuum
Break object into a large number of solid elements
which fit together,
Solve partial differential equations for the stresses
and strains in each element
http://www.cotsjournalonline.com/articles/view/100781Pixelux use a finite-element-based approach for DMM
Image © Zhi Dong
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
40 CONTINUUM MECHANICS
What we need to solve is the momentum equation for a finite element within a continuum
Given a continuous function : THE DISPLACEMENT OF A POINT
Calculate internal body forces per unit volume based on stress
and strain
The equation of motion for soft bodies is:
Solve for
Notes From Müller et al 2007: SIGGRAPH Course Notes on “Real-time Physics”Images left: © BeamNG, Others © Ron Fedkiw
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
41 REQUIRED READING
Mueller, M,. James, D., Thuerey, N. and Stam, J. Real-time Physics SIGGRAPH 2008 Course Notes
Available at: http://www.matthiasmueller.info/realtimephysics/
The following sections relevant to this lecture (we’ll look at some of the others later)
Chapter 4, sec 4.1 (Continuum Mechanics)
Chapter 2 (Introduction to Solids)
The first part of Mueller’s Siggraph tutorial talk (about 40 mins) available as a video: http://www.scss.tcd.ie/John.Dingliana/cs7057/mullertalk.mov
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE
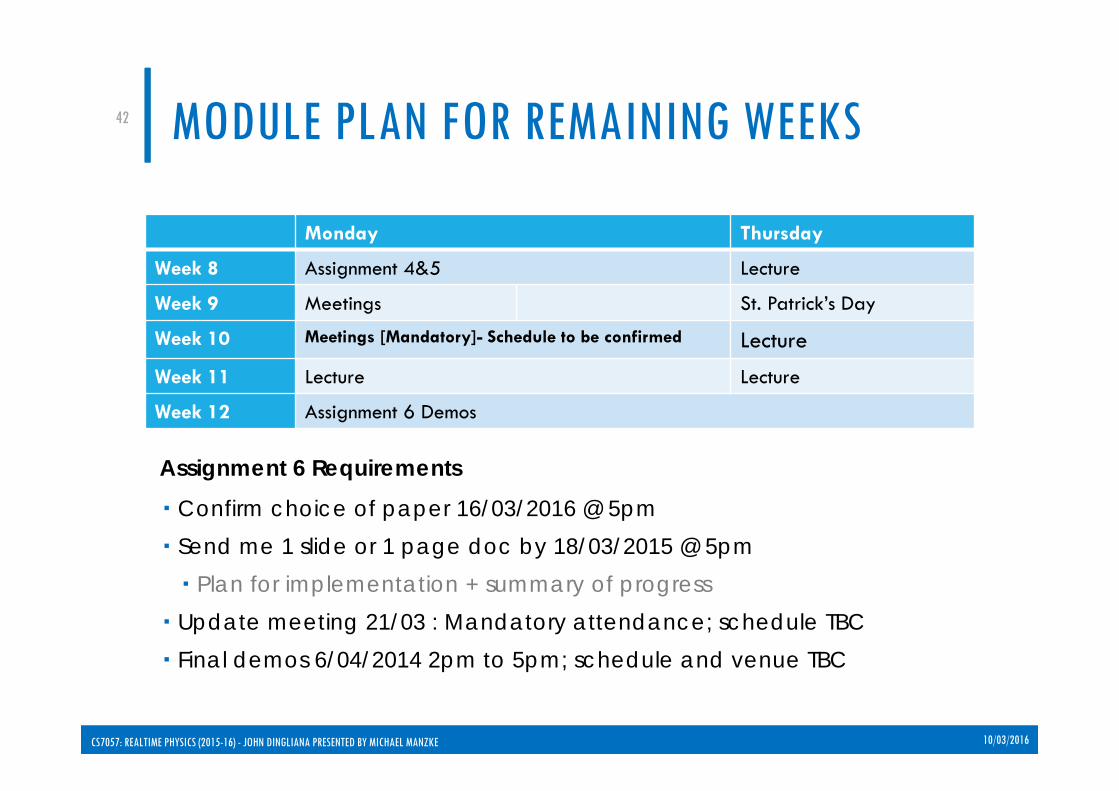
42 MODULE PLAN FOR REMAINING WEEKS
Monday Thursday
Week 8 Assignment 4&5 Lecture
Week 9 Meetings St. Patrick’s Day
Week 10 Meetings [Mandatory]- Schedule to be confirmed Lecture
Week 11 Lecture Lecture
Week 12 Assignment 6 Demos
Assignment 6 Requirements
Confirm choice of paper 16/03/2016 @ 5pm Send me 1 slide or 1 page doc by 18/03/2015 @ 5pm Plan for implementation + summary of progress
Update meeting 21/03 : Mandatory attendance; schedule TBC Final demos 6/04/2014 2pm to 5pm; schedule and venue TBC
10/03/2016CS7057: REALTIME PHYSICS (2015-16) - JOHN DINGLIANA PRESENTED BY MICHAEL MANZKE