Embed Size (px)
Citation preview
MAŞINI ŞI INSTALAŢII NAVALE 225
CAPITOLUL 9
INSTALAŢII DE PROPULSIE
9.1. EVOLUŢIA INSTALAŢIILOR NAVALE DE PROPULSIE
Din cele mai îndepartate timpuri şi până în secolul al XVII-lea navigaţia a fost condiţionată de puterea vâslaşilor şi de intensitatea curenţilor de aer. Toate încercările de perfecţionare făcute între timp urmăreau doar folosirea cât mai eficientă a acestor factori. Progresele realizate în metalurgie şi fizică precum şi în domeniul construcţiei de nave, au permis realizarea propulsiei mecanice cu maşini cu abur. Astfel, la 25 septembrie 1707, Denis Papin a încercat o navă mică cu maşină cu abur având roţi cu zbaturi. Încercările au fost făcute pe râul Fulda din Germania. Nava a fost distrusă de marinari, considerând-o un pericol pentru activitatea lor. În Franţa Claude de Jouffroy, asociat cu Follenay, construieşte o navă cu roţi cu zbaturi, acţionate de o maşină cu abur, cu care face o demonstraţie publică la 15 iulie 1783. Încercări similare au fost efectuate în Anglia şi în America, unde John Fitch în 1790 reuşeşte să înfiinţeze un serviciu regulat de navigaţie cu nave mici cu propulsie cu abur, între Philadelphia şi Newton cu viteza de 6-8 mile/oră.În Europa, printre primele maşini cu abur şi roţi cu zbaturi a fost vaporul Elisabeta , construit la Petersburg şi lansat în 1815 pentru navigaţia pe ruta Petersburg-Kronstadt. Pentru o perioadă de tranziţie, de circa un secol, s-a folosit o soluţie mixtă , nave cu vele şi maşini cu abur, care au continuat să fie folosite încă mult timp cu rezultate bune. Prima navă comercială cu maşină cu abur, numită „Clairmont”, a fost construitădupă proiectul lui Robert Fulton. Nava, cu o lungime de 45,72 m şi un deplasament de 100 tone, trebuia să asigure legătura pe Hudson între New York şi Albany. Prima cursă afost realizată la 17 august 1807, cu viteza de circa 7,5 km/h, având o maşină alternativăcu abur, verticală, de 18 CP, care antrena propulsorul, o roată cu pale din lemn. Nava era prevăzută şi cu vele care se foloseau pentru propulsie când era vânt favorabil. La începutul anului 1900 au apărut primele nave la care propulsia era realizată exclusiv cu maşini alternative cu abur. Tot cu asemenea maşini erau acţionate şi mecanismele auxiliare ale acestor nave. Primele nave cu turbine cu abur au fost construite şi puse în exploatare în anul 1898. În 1910 s-a realizat prima instalaţie de propulsie cu turbine cu abur la care, între turbină şi propulsor, s-a introdus un reductor. Ulterior s-au construit asemenea nave, dotate cu transmisie electrică sau hidraulică. Instalaţiile navale de propulsie cu motoare Diesel încep a fi cunoscute din anul 1903, când în Rusia a fost construită nava “Vandal” pe care s-au instalat trei motoare având fiecare trei cilindri şi dezvoltând 120 CP. Cele trei propulsoare (elice) erau acţionate cu electromotoare.
226 Florin Nicolae
Prima instalaţie de propulsie cu turbine cu gaze, având cameră de ardere, s-a construit în Anglia în 1951 şi a fost montată pe petrolierul maritim “Auris”. Ulterior au mai fost construite şi alte asemenea sisteme de propulsie. Descoperirea energiei atomice şi folosirea ei în scopuri paşnice a intervenit cu implicaţii mari şi în propulsia navelor. Începând din anul 1955, s-au construit mai întâi sisteme de propulsie cu energie atomică pentru navele militare, după care s-au aplicat şi la navele comerciale. Economicitatea acestor sisteme de propulsie deocamdată este scăzută,iar masa lor este mult mai mare comparativ cu masa instalaţiilor care folosesc combustibil clasic.
9.2. ROLUL ŞI CLASIFICAREA INSTALAŢIEI DE PROPULSIE
Prin sistem sau instalaţie navală de propulsie se defineşte complexul format din maşinile principale şi auxiliare, care au rolul de a transforma energia conţinută în combustibil în energie: termică, mecanică, electrică şi hidraulică, destinată pentru: a) deplasarea navei, în condiţii normale de exploatare, cu viteza prevăzută, pedrumul dorit; b) funcţionarea maşinilor şi a instalaţiilor ce deservesc maşinile principale de propulsie; c) alimentarea cu energie electrică a aparaturii de navigaţie, a instalaţilor de semnalizare şi a aparatelor şi sistemelor de măsură, control şi comandă, a sistemului de propulsie şi a altor instalaţii; d) acţionarea mecanismelor de punte folosite pentru diverse operaţiuni în timpul exploatării navei; e) funcţionarea instalaţiilor care asigură condiţii normale de viaţă pentru călători şi echipajul navei; f) funcţionarea diferitelor agregate şi instalaţii care îndeplinesc sarcini deosebite la bordul navei. Pentru clasificarea sistemelor navale de propulsie se folosesc două criterii: a) tipul fluidului care evoluează în maşinile principale şi auxiliare ale instalaţiei de propulsie denumit fluid motor; b) tipul subsistemului de transmisie a energiei, de la maşinile principale la propulsor. Fluidul motor, prin proprietăţile lui fizice şi chimice, determină atât tipul constructiv al maşinilor principale şi auxiliare ale sistemului de propulsie, cât şicaracteristicile tehnice şi economice de exploatare, deci influenţează economicitatea navei. După natura fluidului motor, instalaţiile navale de propulsie se împart în douăgrupe principale: a) sisteme sau instalaţii de propulsie cu gaze (SPG); b) sisteme de propulsie cu vapori (SPV).
MAŞINI ŞI INSTALAŢII NAVALE 227
Sistemele de propulsie din cele două grupe pot fi la rândul lor clasificate dupămai multe criterii. După tipul maşinilor principale şi a felului de energie utilizată:
a) sisteme de propulsie cu motoare cu ardere internă (SPMAG); b) sisteme de propulsie cu turbine cu gaze (SPTG); c) sisteme de propulsie combinate, cu motoare cu ardere internă şi cu turbine cu gaze (SPMATG); d) sisteme de propulsie cu turbine cu gaze care utilizează energie nucleară(SPTGN); e) sisteme de propulsie cu maşini alternative cu vapori (SPMAV); f) sisteme de propulsie cu turbine cu vapori (SPTV); g) sisteme de propulsie combinate, cu maşini alternative şi cu turbine cu vapori (SPMATV); h) sisteme de propulsie cu turbine cu vapori, care utilizează energie nucleară(SPTVN). Subsistemul de transmisie aplicat între maşinile principale şi propulsor, pentru acelaşi fluid motor, depinde de tipul maşinilor de propulsie şi are influenţă asupra randamentului de transmisie a energiei. După acest criteriu, sistemele navale de propulsie pot fi:
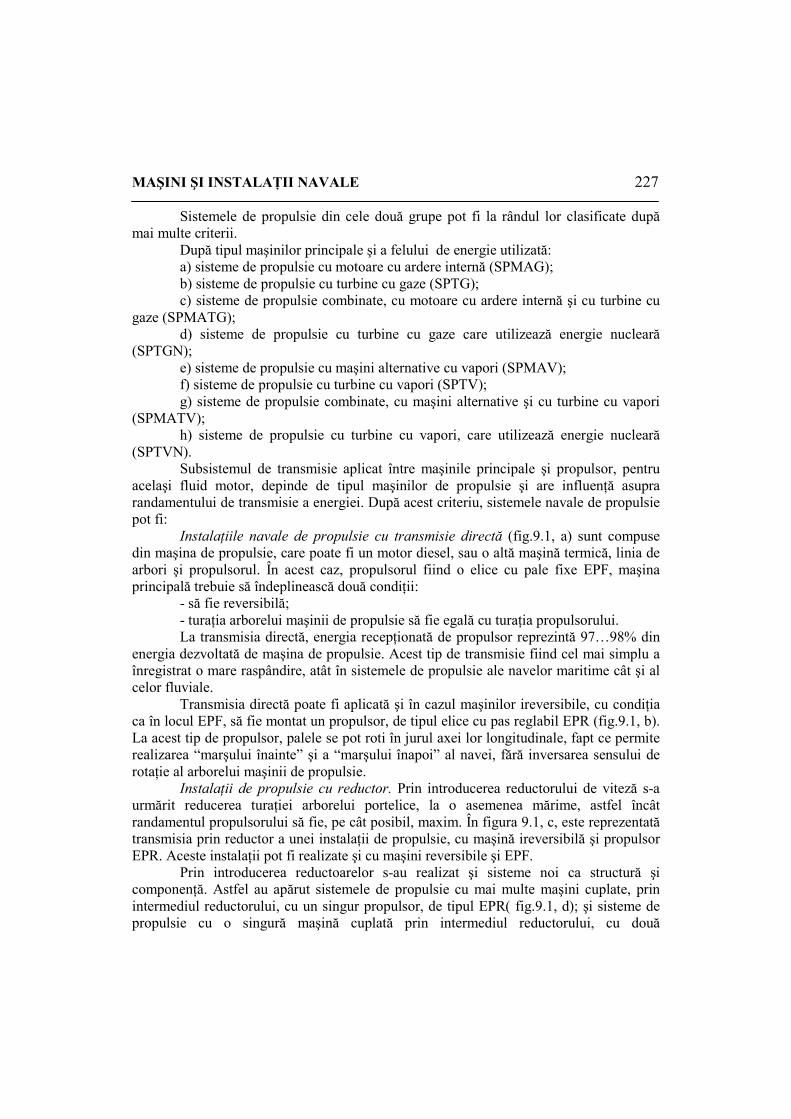
Instalaţiile navale de propulsie cu transmisie directă (fig.9.1, a) sunt compuse din maşina de propulsie, care poate fi un motor diesel, sau o altă maşină termică, linia de arbori şi propulsorul. În acest caz, propulsorul fiind o elice cu pale fixe EPF, maşina principală trebuie să îndeplinească două condiţii:
- să fie reversibilă;- turaţia arborelui maşinii de propulsie să fie egală cu turaţia propulsorului. La transmisia directă, energia recepţionată de propulsor reprezintă 97…98% din
energia dezvoltată de maşina de propulsie. Acest tip de transmisie fiind cel mai simplu a înregistrat o mare raspândire, atât în sistemele de propulsie ale navelor maritime cât şi al celor fluviale.
Transmisia directă poate fi aplicată şi în cazul maşinilor ireversibile, cu condiţia ca în locul EPF, să fie montat un propulsor, de tipul elice cu pas reglabil EPR (fig.9.1, b). La acest tip de propulsor, palele se pot roti în jurul axei lor longitudinale, fapt ce permite realizarea “marşului înainte” şi a “marşului înapoi” al navei, fără inversarea sensului de rotaţie al arborelui maşinii de propulsie.
Instalaţii de propulsie cu reductor. Prin introducerea reductorului de viteză s-a urmărit reducerea turaţiei arborelui portelice, la o asemenea mărime, astfel încât randamentul propulsorului să fie, pe cât posibil, maxim. În figura 9.1, c, este reprezentatătransmisia prin reductor a unei instalaţii de propulsie, cu maşină ireversibilă şi propulsor EPR. Aceste instalaţii pot fi realizate şi cu maşini reversibile şi EPF.
Prin introducerea reductoarelor s-au realizat şi sisteme noi ca structură şicomponenţă. Astfel au apărut sistemele de propulsie cu mai multe maşini cuplate, prin intermediul reductorului, cu un singur propulsor, de tipul EPR( fig.9.1, d); şi sisteme de propulsie cu o singură maşină cuplată prin intermediul reductorului, cu două
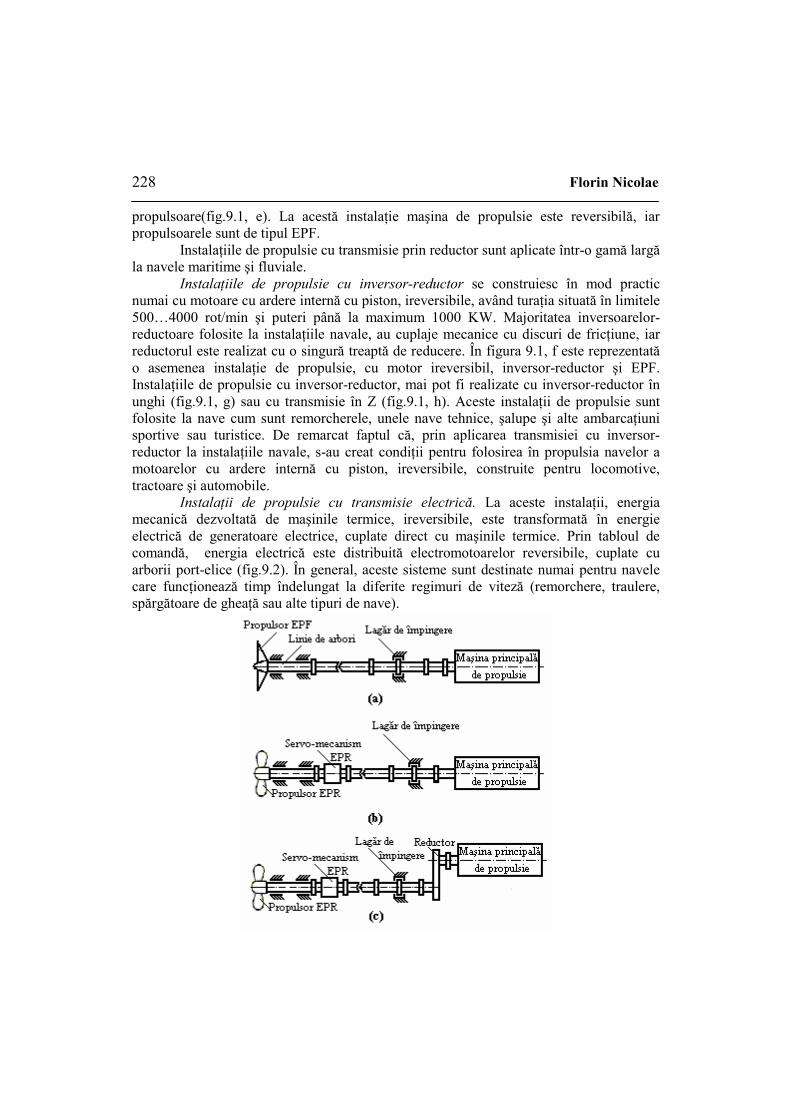
228 Florin Nicolae propulsoare(fig.9.1, e). La acestă instalaţie maşina de propulsie este reversibilă, iar propulsoarele sunt de tipul EPF.
Instalaţiile de propulsie cu transmisie prin reductor sunt aplicate într-o gamă largăla navele maritime şi fluviale.
Instalaţiile de propulsie cu inversor-reductor se construiesc în mod practic numai cu motoare cu ardere internă cu piston, ireversibile, având turaţia situată în limitele 500…4000 rot/min şi puteri până la maximum 1000 KW. Majoritatea inversoarelor-reductoare folosite la instalaţiile navale, au cuplaje mecanice cu discuri de fricţiune, iar reductorul este realizat cu o singură treaptă de reducere. În figura 9.1, f este reprezentatăo asemenea instalaţie de propulsie, cu motor ireversibil, inversor-reductor şi EPF. Instalaţiile de propulsie cu inversor-reductor, mai pot fi realizate cu inversor-reductor în unghi (fig.9.1, g) sau cu transmisie în Z (fig.9.1, h). Aceste instalaţii de propulsie sunt folosite la nave cum sunt remorcherele, unele nave tehnice, şalupe şi alte ambarcaţiuni sportive sau turistice. De remarcat faptul că, prin aplicarea transmisiei cu inversor-reductor la instalaţiile navale, s-au creat condiţii pentru folosirea în propulsia navelor a motoarelor cu ardere internă cu piston, ireversibile, construite pentru locomotive, tractoare şi automobile.
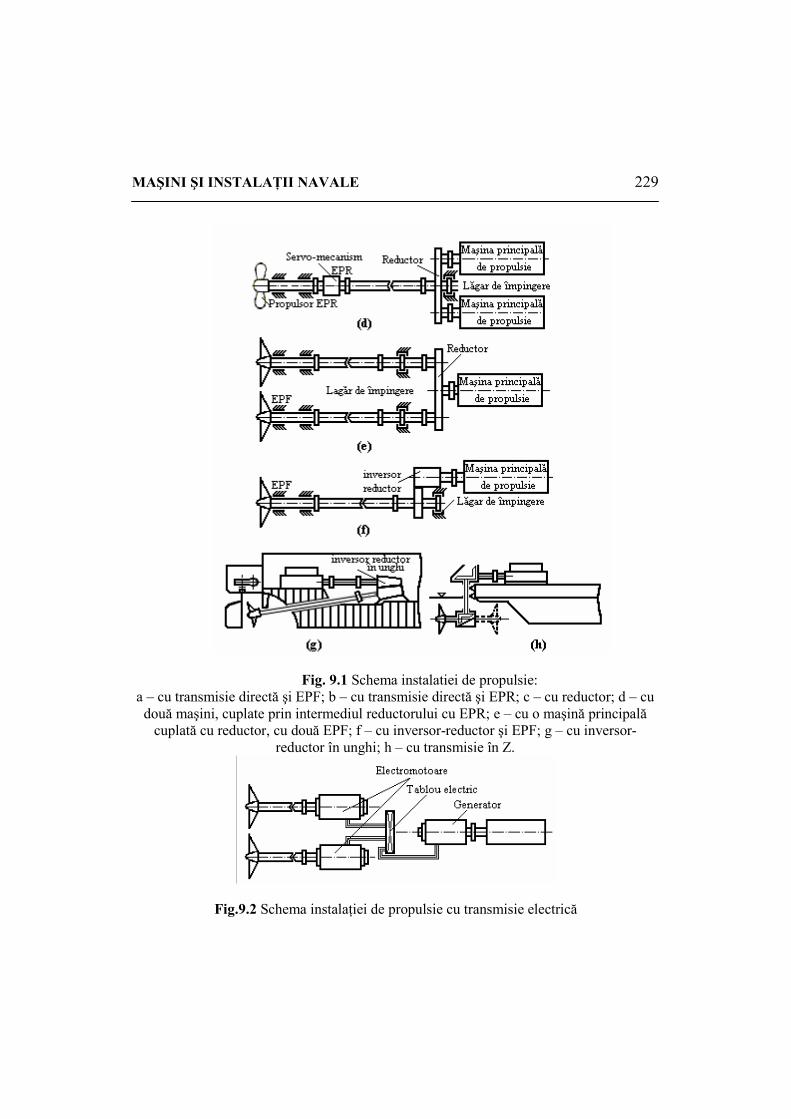
Instalaţii de propulsie cu transmisie electrică. La aceste instalaţii, energia mecanică dezvoltată de maşinile termice, ireversibile, este transformată în energie electrică de generatoare electrice, cuplate direct cu maşinile termice. Prin tabloul de comandă, energia electrică este distribuită electromotoarelor reversibile, cuplate cu arborii port-elice (fig.9.2). În general, aceste sisteme sunt destinate numai pentru navele care funcţionează timp îndelungat la diferite regimuri de viteză (remorchere, traulere, spărgătoare de gheaţă sau alte tipuri de nave).
MAŞINI ŞI INSTALAŢII NAVALE 229
Fig. 9.1 Schema instalatiei de propulsie: a – cu transmisie directă şi EPF; b – cu transmisie directă şi EPR; c – cu reductor; d – cu
două maşini, cuplate prin intermediul reductorului cu EPR; e – cu o maşină principalăcuplată cu reductor, cu două EPF; f – cu inversor-reductor şi EPF; g – cu inversor-
reductor în unghi; h – cu transmisie în Z.
Fig.9.2 Schema instalaţiei de propulsie cu transmisie electrică
230 Florin Nicolae
9.3. ELEMENTELE COMPONENTE ALE UNEI INSTALAŢII NAVALE DE PROPULSIE
Componenţa unei instalaţii de propulsie depinde de tipul ei, caracterizat prin tipul
fluidului motor şi prin tipul sistemului de transmisie a energiei. Pentru oricare tip de instalaţie sau sistem naval de propulsie, părţile ei componente pot fi grupate astfel:
a) transformatoare principale de energie, agregatele şi subsistemele lor; b) transformatoare auxiliare de energie, agregatele şi subsistemele lor. Prima grupă cuprinde acele părţi componente ale sistemului de propulsie, prin
care se realizează deplasarea navei cu o anumită viteză. Deci, aceasta grupă cuprinde acele componente ale sistemului, care participă direct la transformările energetice prin care se realizează propulsia navei. Pe acest considerent acestea sunt denumite în general, componente principale ale instalaţiei de propulsie.
În grupa a doua sunt cuprinse elmentele sistemului de propulsie care, prin funcţionarea lor, creează condiţiile necesare pentru producerea în mod corespunzător, a transformărilor energetice prin care se realizează propulsia navei. Prin urmare, aceastăgrupă cuprinde acele componente ale sistemului de propulsie care participă indirect la transformările energetice prin care se realizează propulsia navei. Pe acest considerent sunt denumite, în general, componente auxiliare ale sistemului de propulsie.
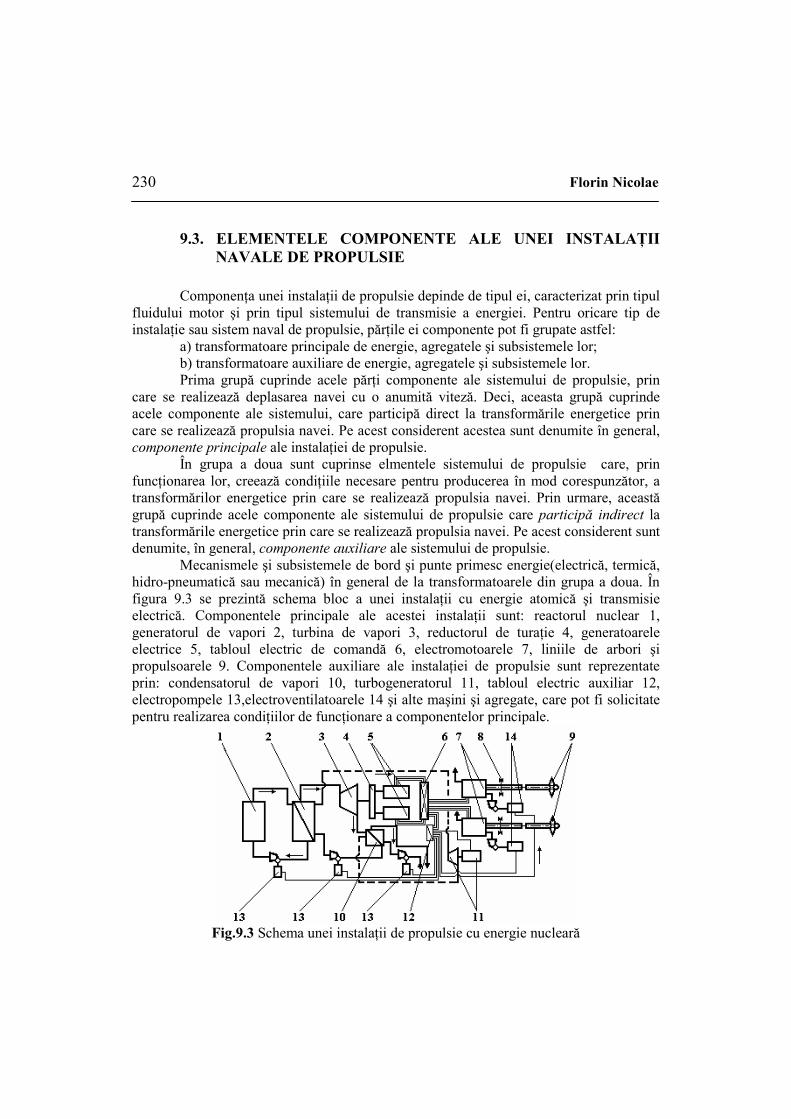
Mecanismele şi subsistemele de bord şi punte primesc energie(electrică, termică,hidro-pneumatică sau mecanică) în general de la transformatoarele din grupa a doua. În figura 9.3 se prezintă schema bloc a unei instalaţii cu energie atomică şi transmisie electrică. Componentele principale ale acestei instalaţii sunt: reactorul nuclear 1, generatorul de vapori 2, turbina de vapori 3, reductorul de turaţie 4, generatoarele electrice 5, tabloul electric de comandă 6, electromotoarele 7, liniile de arbori şipropulsoarele 9. Componentele auxiliare ale instalaţiei de propulsie sunt reprezentate prin: condensatorul de vapori 10, turbogeneratorul 11, tabloul electric auxiliar 12, electropompele 13,electroventilatoarele 14 şi alte maşini şi agregate, care pot fi solicitate pentru realizarea condiţiilor de funcţionare a componentelor principale.
Fig.9.3 Schema unei instalaţii de propulsie cu energie nucleară
MAŞINI ŞI INSTALAŢII NAVALE 231
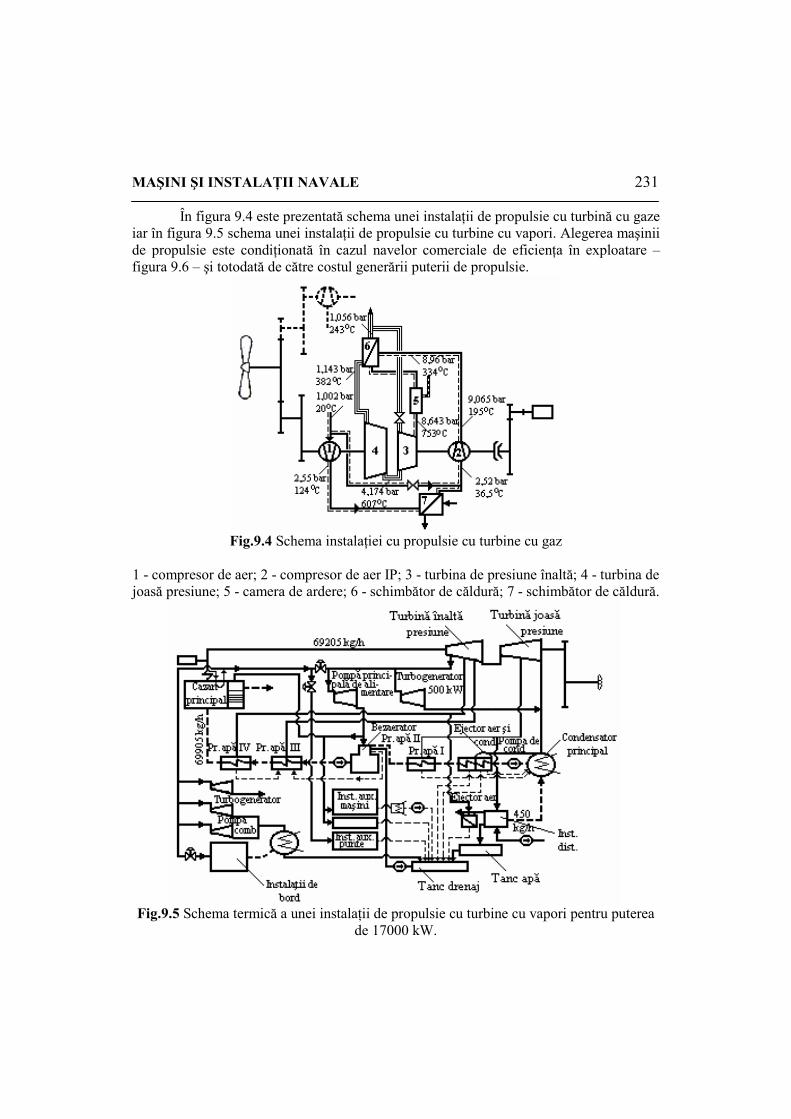
În figura 9.4 este prezentată schema unei instalaţii de propulsie cu turbină cu gaze iar în figura 9.5 schema unei instalaţii de propulsie cu turbine cu vapori. Alegerea maşinii de propulsie este condiţionată în cazul navelor comerciale de eficienţa în exploatare – figura 9.6 – şi totodată de către costul generării puterii de propulsie.
Fig.9.4 Schema instalaţiei cu propulsie cu turbine cu gaz
1 - compresor de aer; 2 - compresor de aer IP; 3 - turbina de presiune înaltă; 4 - turbina de joasă presiune; 5 - camera de ardere; 6 - schimbător de căldură; 7 - schimbător de căldură.
Fig.9.5 Schema termică a unei instalaţii de propulsie cu turbine cu vapori pentru puterea de 17000 kW.
232 Florin Nicolae
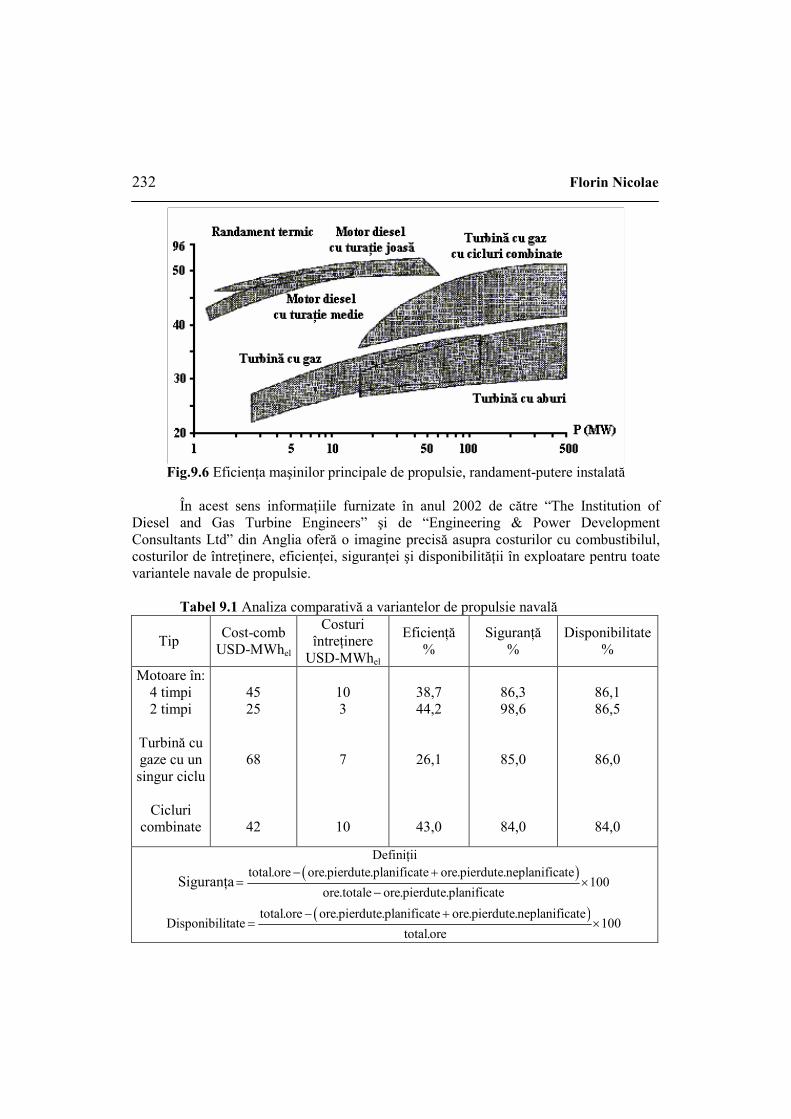
Fig.9.6 Eficienţa maşinilor principale de propulsie, randament-putere instalată
În acest sens informaţiile furnizate în anul 2002 de către “The Institution of Diesel and Gas Turbine Engineers” şi de “Engineering & Power Development Consultants Ltd” din Anglia oferă o imagine precisă asupra costurilor cu combustibilul, costurilor de întreţinere, eficienţei, siguranţei şi disponibilităţii în exploatare pentru toate variantele navale de propulsie.
Tabel 9.1 Analiza comparativă a variantelor de propulsie navală
Tip Cost-comb USD-MWhel
Costuri întreţinere
USD-MWhel
Eficienţă %
Siguranţă %
Disponibilitate %
Motoare în:4 timpi 2 timpi
Turbină cu gaze cu un singur ciclu
Cicluri combinate
45 25
68
42
10 3
7
10
38,7 44,2
26,1
43,0
86,3 98,6
85,0
84,0
86,1 86,5
86,0
84,0
Definiţii
Siguranţa ( )total.ore ore.pierdute.planificate ore.pierdute.neplanificate100
ore.totale ore.pierdute.planificate− +
= ×−
Disponibilitate( )total.ore ore.pierdute.planificate ore.pierdute.neplanificate
100total.ore
− += ×
MAŞINI ŞI INSTALAŢII NAVALE 233
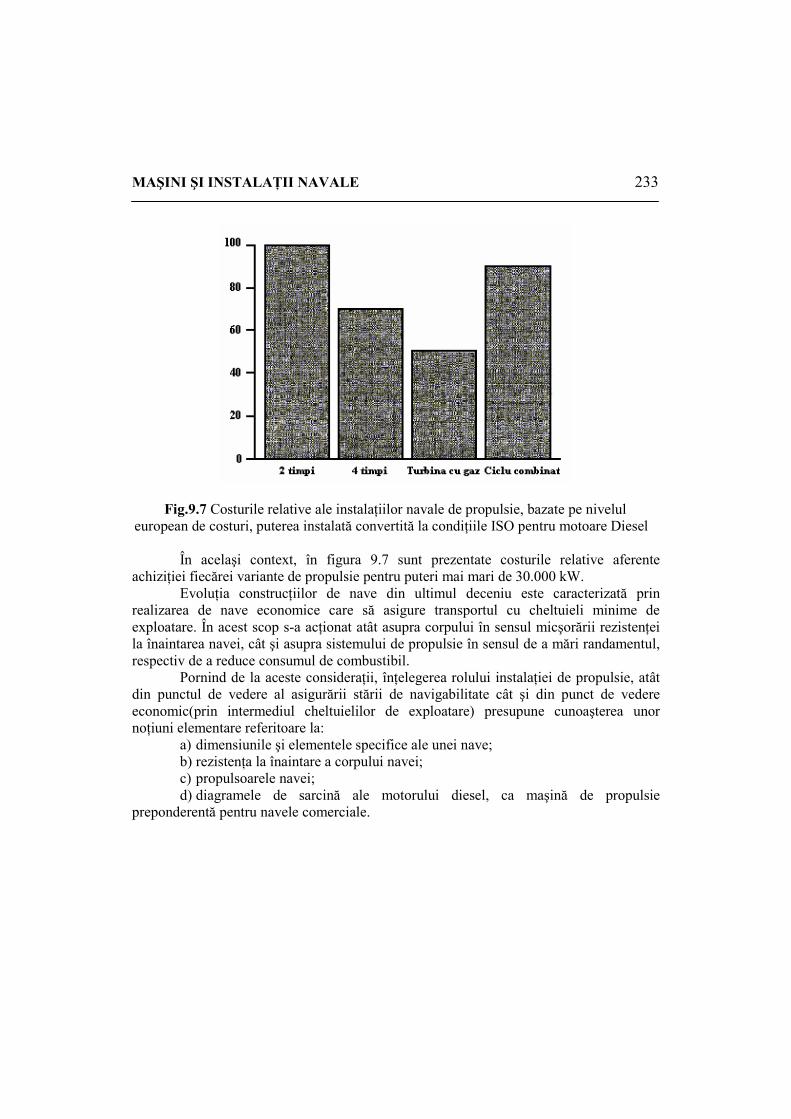
Fig.9.7 Costurile relative ale instalaţiilor navale de propulsie, bazate pe nivelul european de costuri, puterea instalată convertită la condiţiile ISO pentru motoare Diesel
În acelaşi context, în figura 9.7 sunt prezentate costurile relative aferente
achiziţiei fiecărei variante de propulsie pentru puteri mai mari de 30.000 kW. Evoluţia construcţiilor de nave din ultimul deceniu este caracterizată prin
realizarea de nave economice care să asigure transportul cu cheltuieli minime de exploatare. În acest scop s-a acţionat atât asupra corpului în sensul micşorării rezistenţei la înaintarea navei, cât şi asupra sistemului de propulsie în sensul de a mări randamentul, respectiv de a reduce consumul de combustibil.
Pornind de la aceste consideraţii, înţelegerea rolului instalaţiei de propulsie, atât din punctul de vedere al asigurării stării de navigabilitate cât şi din punct de vedere economic(prin intermediul cheltuielilor de exploatare) presupune cunoaşterea unor noţiuni elementare referitoare la:
a) dimensiunile şi elementele specifice ale unei nave; b) rezistenţa la înaintare a corpului navei; c) propulsoarele navei; d) diagramele de sarcină ale motorului diesel, ca maşină de propulsie
preponderentă pentru navele comerciale.
234 Florin Nicolae
9.4. PRINCIPII DE BAZĂ ALE PROPULSIEI NAVALE
Propulsia navei se realizează de obicei cu ajutorul elicei. În limba engleză se foloseşte şi termenul “screw” în special în cuvinte compuse (ex.: “twin-screw” în cazul navelor cu două elici).
Astăzi, sursa principală de putere a elicei este motorul diesel, iar cerinţele referitoare la putere şi turaţie depind foarte mult de forma carenei şi a elicei. Pentru aceasta, în scopul obţinerii celei mai bune soluţii posibile, câteva cunoştinţe generale sunt necesare despre parametrii principali ai navei şi ai motorului diesel, aceştia influenţând eficienţa sistemului de propulsie.
În particular, vom prezenta noţiuni referitoare la tipurile de nave , dimensiuni şiforme specifice, parametrii ce intră în calculul rezistenţei la înaintare a carenei, funcţionarea propulsoarelor şi diagramele de sarcină ale motorului diesel.
9.4.1. Nava: elemente generale şi rezistenţă la înaintare
A. ELEMENTE GENERALE
Tipuri de nave
În funcţie de natura mărfurilor pe care le transportă şi câte-odată în funcţie de modul în care mărfurile sunt încărcate/ descăcate, navele se clasifică în diferite categorii, clase, tipuri ( tabelul 9.2 ).
Cele mai mari categorii de nave sunt vrachierele (pentru cereale, cărbuni, minereu etc. în vrac) şi tancurile, care la rândul lor se împart în petroliere, nave pentru transport gaze lichefiate şi tancuri chimice, dar există şi combinaţii ale acestora (ex.: tanc petrolier/ chimic).
(Tabelul 9.2 ne oferă numai o viziune de ansamblu, în realitate există multe alte combinaţii cum ar fi :”Multi-purpose bulk container carrier”.)
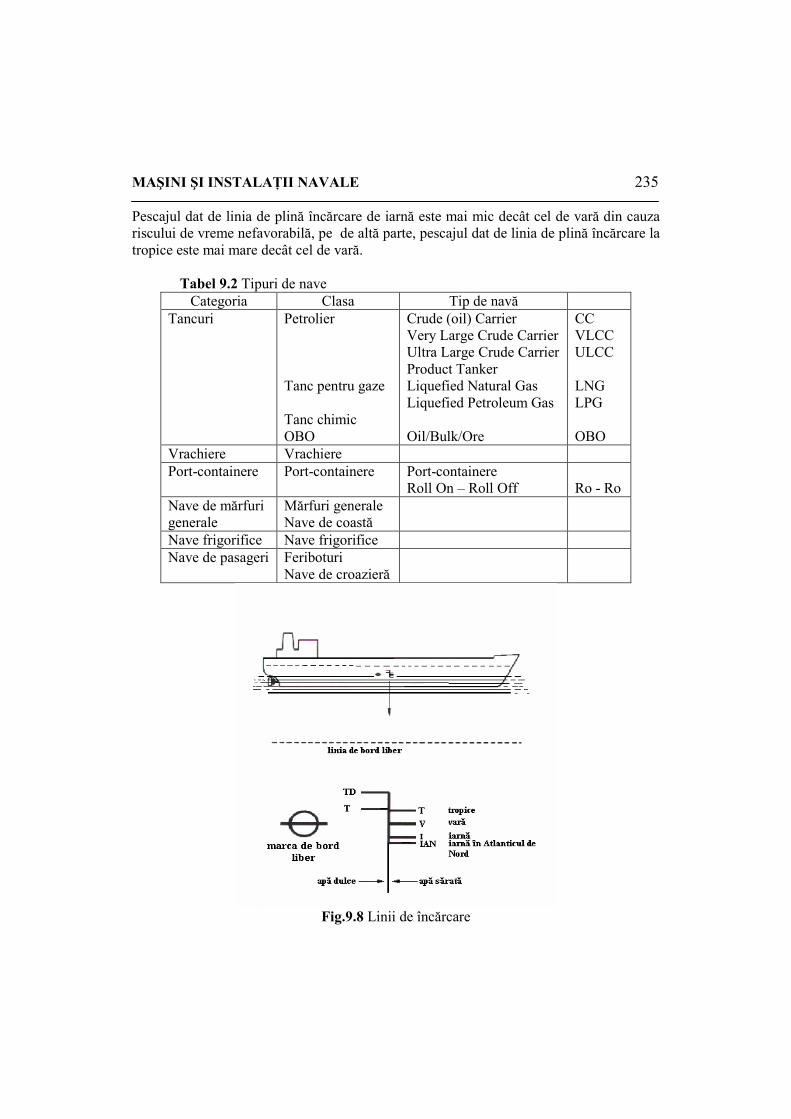
Liniile de încărcare
La mijlocul navei, pe fiecare parte se află marca de bord liber (fig.9.8). Liniile şiliterele, care sunt conforme cu convenţia de bord liber a IMO şi cu reglementările autorităţilor locale, indică pescajul până la care nava poate fi încărcată în siguranţă (pescajul diferă în funcţie de anotimp şi de salinitatea apei).
Există, luând ca ex. liniile de încărcare pentru apă dulce şi apă sărată, mai multe diviziuni pentru fiecare dintre acestea, când se navigă vara, iarna sau la tropice. Conform convenţiei bordului liber, pescajul de vară în apa de mare este egal cu pescajul de construcţie care este termenul folosit pentru pescaj când se proiectează corpul navei.
MAŞINI ŞI INSTALAŢII NAVALE 235
Pescajul dat de linia de plină încărcare de iarnă este mai mic decât cel de vară din cauza riscului de vreme nefavorabilă, pe de altă parte, pescajul dat de linia de plină încărcare la tropice este mai mare decât cel de vară.
Tabel 9.2 Tipuri de nave Categoria Clasa Tip de navă
Tancuri Petrolier
Tanc pentru gaze Tanc chimic OBO
Crude (oil) Carrier Very Large Crude Carrier Ultra Large Crude Carrier Product Tanker Liquefied Natural Gas Liquefied Petroleum Gas Oil/Bulk/Ore
CC VLCC ULCC LNG LPG OBO
Vrachiere Vrachiere Port-containere Port-containere Port-containere
Roll On – Roll Off Ro - Ro
Nave de mărfuri generale
Mărfuri generale Nave de coastă
Nave frigorifice Nave frigorifice Nave de pasageri Feriboturi
Nave de croazieră
Fig.9.8 Linii de încărcare
236 Florin Nicolae
Dimensiuni şi coeficienţi de fineţe
a) Deplasamentul şi deadweightul Pentru o navă încărcată la o linie de plutire oarecare, deplasamentul este egal cu masa volumului de apă dizlocuit de navă. Deci, deplasamentul este egal cu greutatea totală anavei încărcate pentru o densitate a apei de mare de 1,025 t/m3.
Deplasamentul navei este compus din greutatea navei nude şi deadweight, unde deadweightul este egal cu greutatea mărfii utile, a combustibilului şi alte rezerve necesare pentru funcţionarea navei. Deadweightul reprezintă deci, diferenţa dintre deplasamentul respectiv şi greutatea navei nude, toate măsurate în tone:
dw golD D D= −Termenul tonă nu exprimă întotdeauna aceeaşi unitate de măsură. În afară de tona
metrică (1000 kg), există şi tona engleză (1016 kg), numită şi tonă lungă. O tonă scurtăare aproximativ 907 kg.
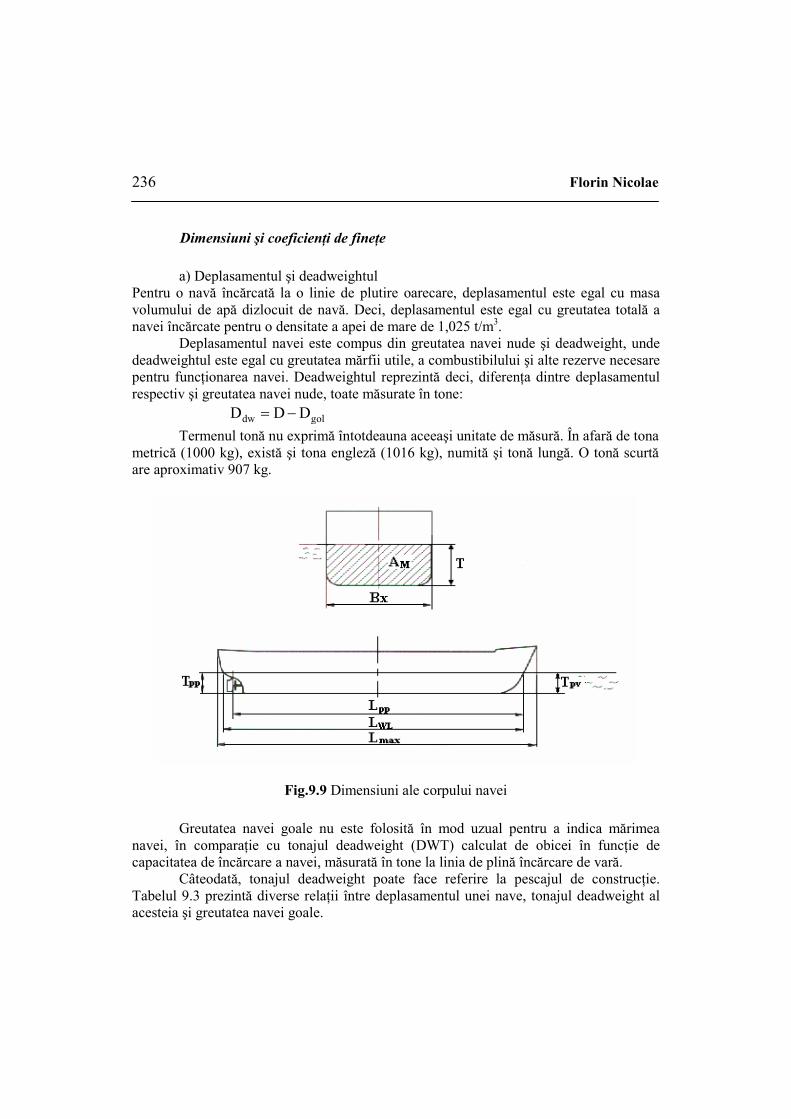
Fig.9.9 Dimensiuni ale corpului navei Greutatea navei goale nu este folosită în mod uzual pentru a indica mărimea
navei, în comparaţie cu tonajul deadweight (DWT) calculat de obicei în funcţie de capacitatea de încărcare a navei, măsurată în tone la linia de plină încărcare de vară.
Câteodată, tonajul deadweight poate face referire la pescajul de construcţie. Tabelul 9.3 prezintă diverse relaţii între deplasamentul unei nave, tonajul deadweight al acesteia şi greutatea navei goale.
MAŞINI ŞI INSTALAŢII NAVALE 237
Tabel 9.3 Exemple de relaţii între deplasamentul unei nave, tonajul deadweight al acesteia şi greutatea navei goale.
Tipul navei DWT/gr. navăgoală
Depl./ DWT
Tancuri şivrachiere
6 1,17
Port-cotainere
2,5 –3,0
1,33 – 1,4
Deplasamentul unei nave poate fi de asemenea exprimat ca volumul de apă dezlocuită V, în m3.
b) Tonajul registru brut Fără a intra în detalii, trebuie menţionat că există de asemenea, unităţi de măsură
ca “tona registru brut” (TRB) şi “tona registru net” (TRN), unde 1 tonă registru = 100 ft3
=2,83 m3.Aceste unităţi de măsură exprimă mărimea volumului intern al navei, în
concordanţă cu regulile existente pentru aceste unităţi de măsură şi sunt folosite foarte mult pentru calculul taxelor de port şi trecere/tranzit prin canale.
c) Geometria corpului navei Evident, partea de sub linia de plutire a navei este cea mai importantă pentru
deplasarea navei prin apă. Desenul de mai sus, fig.9.9 se referă la pescajul de construcţie care este mai mic sau egal decât pescajul liniei de vară, alegerea pescajului de construcţie depinde de gradul de încărcare ( de exemplu, dacă nava va fi mai mult sau mai puţin încărcată). În general, pescajul cel mai frecvent folosit este între linia de plină încărcare şipescajul de balast. Lungimea maximă a navei Lmax nu are de obicei relevanţă în calculul rezistenţei la înaintare a navei. De obicei se folosesc LWL şi Lpp. Aceste dimensiuni sunt arătate în fig.9.9. Lpp este lungimea măsurată între intersecţia etravei cu linia de plină încărcare şiaxul cârmei. În general această lungime este puţin mai mică decât LWL şi se exprimăastfel: pp WLL = 0,97 L⋅
d) Pescajul T Pescajul navei (T ) este definit ca distanţa măsurată pe verticală între linia de
plutire şi chilă (vezi fig.9.9). TPV şi TPP sunt de obicei egale când nava este la plinăîncărcare. e) Lăţimea navei la o plutire oarecare Bx
O altă dimensiune importantă este Bx, cea mai mare lăţime a navei măsurată pe o plutire oarecare.
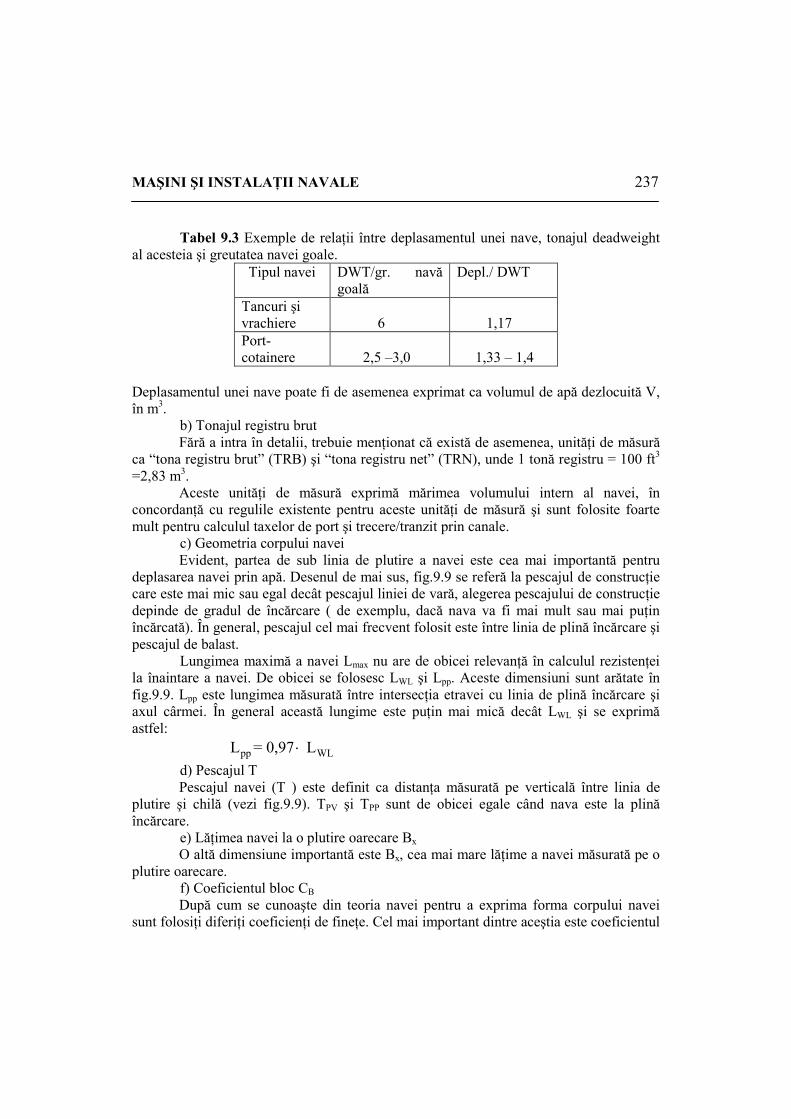
f) Coeficientul bloc CBDupă cum se cunoaşte din teoria navei pentru a exprima forma corpului navei
sunt folosiţi diferiţi coeficienţi de fineţe. Cel mai important dintre aceştia este coeficientul
238 Florin Nicolae bloc CB care este definit de raportul între volumul V şi volumul unui paralelipiped cu dimensiunile WL XL B T ⋅ ⋅ , figura 9.10:
BWL X
VCL B T
=⋅ ⋅
(9.1)
În cazul de mai sus, CB se referă la LWL. Totuşi, inginerii navali folosesc de obicei CB în funcţie de LPP, caz în care ca regulă, coeficientul va fi uşor mai mare deoarece LPP este uşor mai mic decât LWL. Un coeficient bloc mic înseamnă rezistenţă la înaintare redusă şi deci posibilitatea obţinerii unor viteze mai mari.
Fig.9.10 Coeficienţii de fineţe ai navei
Tabelul 9.4. prezintă câteva exemple valorice de coeficienţi bloc şi vitezele economice pentru câteva tipuri de nave. Se observă că vitezelor reduse le corespund coeficienţi bloc mari şi viceversa.
Tabel 9.4 Coeficienţi bloc pentru diferite tipuri de nave Tipuri de nave
CB
Viteza aprox. în noduri
Uşoare 0,90 5-10 Vrachiere 0,80-0,85 12-17 Tancuri 0,80-0,85 12-16 Mărfuri generale 0,55-0,75 13-22 Port-container 0,50-0,70 14-25 Feriboturi 0,50-0,70 15-25

MAŞINI ŞI INSTALAŢII NAVALE 239
g) Coeficientul de fineţe al suprafeţei plutirii de plină încărcare CWLAcest coeficient CWL este egal cu raportul între suprafaţa plutirii de plină
încărcare AWL şi produsul dintre lungimea LWL şi lăţimea BX, fig.9.10:
WLWL
WL X
ACL B
=⋅
(9.2)
În general, coeficientul de fineţe CWL este cu 0,10 mai mare decât cel bloc: WL BC =C + 0,10 (9.3)
Această diferenţă este uşor mai mare la navele rapide cu coeficienţi bloc mici unde pupa este parţial imersă şi deci suprafaţa AWL este mai mare. h) Coeficientul de fineţe al suprafeţei maestre imerse CM
Alte indicaţii referitoare la forma operei vii sunt date de coeficientul de fineţe al suprafeţei maestre imerse CM care este egal cu raportul între suprafaţa maestră imersă şiprodusul dintre pescajul T şi lăţimea BX, fig.9.10:
MM
X
ACB T
=⋅
(9.4)
Pentru vrachiere şi tancuri acesta este cuprins între 0,98 – 0,99. i) Coeficientul de fineţe longitudinal prismatic CLP
Acest coeficient este exprimat prin raportul între volumul carenei V şi produsul dintre aria suprafeţei maestre AM şi lungimea LWL (vezi fig.9.10):
BLP
M WL M X WL M
CV VCA L C B T L C
= = =⋅ ⋅ ⋅ ⋅
(9.5)
După cum se observă, CLP depinde de coeficientul bloc şi de coeficientul de fineţe al suprafeţei maestre. j) Centrul plutirii longitudinale B
Centrul plutirii longitudinale B exprimă poziţia centrului plutirii şi este definit ca distanţa dintre centrul plutirii şi mijlocul distanţei între cele două perpendiculare pupa şiprova, această distanţă este dată de obicei ca un procent din LPP şi este pozitivă, dacă Beste situat spre prova, şi negativă, dacă este situat spre pupa. Pentru navele de mare viteză(ex.: nave port-containere), B este de obicei negativ pe când pentru navele cu viteze reduse (tancuri, vrachiere) este pozitiv. B este în general cuprins între –3% şi +3%. k) Coeficientul de fineţe CLD
Coeficientul de fineţe lungime – deplasament este egal cu raportul între lungimea LWL şi rădăcina cubică a deplasamentului ∆:
WLLD 3
LC =∆
(9.6)

240 Florin Nicolae
B. REZISTENŢA LA ÎNAINTARE A NAVEI
Pentru a înainta, o navă trebuie să învingă forţele de rezistenţă. Calculul rezistenţei R joacă un rol important în alegerea corectă a tipului de elice şi a tipului de motor.
Generalităţi
Rezistenţa la înaintare este influenţată de viteză, deplasament şi geometria corpului navei. Rezistenţa totală RT este formată din mai multe componente R, care se clasifică în trei grupe:
1. Rezistenţa de frecare; 2. Rezistenţa reziduală;3. Rezistenţa la înaintare a aerului.
Rezistenţele de frecare şi reziduale depind de partea imersă, pe când rezistenţa datăde aer depinde de partea emersă. În aceste condiţii, rezistenţa dată de aer va avea un rol important la port-containere care transportă un număr mare de containere pe punte.
Apa cu o viteză v şi o densitate ρ exercită o presiune dinamică egală cu :
2d
1p v2
= ⋅ρ ⋅ (9.7)
aşadar, apa va exercita pe suprafaţa corpului navei o presiune dinamică având ca rezultantă o forţă dinamică.
Această relaţie este de bază în calculul şi la măsurarea rezistenţei R a carenei, în sensul dat de coeficienţii adimensionali de rezistenţă C. Rezultanta R depinde de forţa K, dată de presiunea dinamică a apei, de viteza v asupra suprafeţei udate a navei AS.Formula de calcul a rezistenţei va fi:
R=C K⋅ (9.8)
unde: 2S
1K= v A2⋅ρ ⋅ ⋅
Pe baza testelor desfăşurate în bazinele de încercări, folosind coeficienţiadimensionali, au fost perfecţionate metode pentru calculul tuturor coeficienţilor de rezistenţă C corespunzători componentelor rezistenţei R. În practică, calculul rezistenţei la înaintare a unei nave poate fi verificat pe un model la scară a navei într-un bazin de încercări.
Rezistenţa de frecare RF
Rezistenţa de frecare a carenei depinde de mărimea suprafeţei udate AS şi de coeficientul de rezistenţă specific de frecare CF (frecarea creşte odată cu creşterea pe opera vie a algelor, scoicilor, etc.).

MAŞINI ŞI INSTALAŢII NAVALE 241
Rezistenţa de frecare a navei creşte proporţional cu pătratul vitezei şi reprezintă oparte importantă a rezistenţei la înaintare a navei, de multe ori fiind 70 – 90% din rezistenţa totală, pentru nave cu viteze reduse (vrachiere, tancuri) şi câteodată mai puţin de 40% pentru navele rapide (port-containere şi pasagere). Rezistenţa de frecare se determină astfel: FR=C K ⋅ (9.9)
Rezistenţa reziduală RR
Rezistenţa reziduală este formată din rezistenţa la înaintare datorată valurilor şirezistenţa datorată curgerii turbionare. Rezistenţa de val se referă la energia pierdută de navă la înaintare din cauza valurilor, în timp ce rezistenţa la curgerea turbionară este datăde pierderile de energie prin formarea vârtejurilor în special la pupa navei (prin diferenţade viteză dintre deferitele straturi de curgere).
Rezistenţa la înaintare de val la viteze reduse este proporţională cu pătratul vitezei, dar creşte rapid pentru viteze mai mari. În principiu, aceasta înseamnă că este impusă o limită de viteză, peste care, din creşterea puterii motorului nu va rezulta o vitezăridicată pentru că toată puterea va fi folosită la formarea valurilor.
Rezistenţa reziduală este: R RR =C K⋅ (9.10)
Rezistenţa datorată curenţilor de aer RA
Pe vreme frumoasă, rezistenţa dată de aer este, în principiu, proporţională cu pătratul vitezei navei şi cu suprafaţa secţiunii AAER obţinută prin proiectarea părţii emerse a navei pe un plan perpendicular pe direcţia de deplasare a curentului de aer. Rezistenţaaerului, în mod normal, reprezintă cca. 2% din rezistenţa totală la înaintare.
Pentru port-containere cu vânt din prova, aceasta poate ajunge până la valori de 10%. Rezistenţa opusă de aer poate fi exprimată, ca şi celelalte, astfel:
2A AER AER
1R =0,9 v A 2
⋅ ⋅ρ ⋅ ⋅ (9.11)
unde ρAER este densitatea aerului.
Rezistenţa totală la înaintare RT şi puterea efectivă PE
Rezistenţa totală la înaintare a navei RT este calculată astfel: T F R AR =R +R +R (9.12) Corespunzător acesteia, puterea efectivă necesară marşului navei prin apă cu viteza v este: E TP = v R ⋅ (9.13)
242 Florin Nicolae
Puterea furnizată la elice PD pentru ca nava să se deplaseze cu viteza v este, totuşi, ceva mai mare. Aceasta datorită, în particular, condiţiilor de curgere şirandamentului elicei.
Creşterea rezistenţei navei aflate în serviciu
În timpul cât nava se află în serviciu, stratul de vopsea aplicat pe corpul navei se va deteriora, la început datorită eroziunii, apoi datorită plantelor marine şi scoicilor care cresc pe carenă. Vremea proastă, precum şi o încărcare incorectă a navei pot cauza încovoieri ale planşeelor de fund. Astfel, carena se deteriorează şi nu va mai avea aceeaşisuprafaţă netedă, ceea ce va duce la creşterea rezistenţei de frecare. Trebuie de asemenea ţinut cont că suprafeţele palelor elicei pot deveni rugoase sau se pot deteriora. Din toate aceste cauze, pe timpul cât nava se află în serviciu, rezistenţa totală poate creşte cu 25-50%.
Rezistenţa totală la înaintare creşte, de asemenea, şi din cauza vântului, curentului şi stării mării. Când se navigă cu valuri din prova, rezistenţa totală poate creşte cu 50-100% fată de rezistenţa la înaintare pe mare calmă.
Procentajul creşterii rezistenţei la înaintare pentru navele care navigă peprincipalele rute de navigaţie se estimează a fi:
- Atlanticul de Nord (spre vest) 25-35% - Atlanticul de Nord (spre est) 20-25% - Europa - Australia 20-25% - Europa - Asia de SE 20-25% - Rute din Pacific 20-30% Pentru Atlanticul de Nord primele procente corespund perioadei de vară, iar cele
din urmă perioadei de iarnă. Cu cât o navă este mai mare, cu atât mai puţin creşte rezistenţa de val. Pe de altă parte, rezistenţa datorată frecării va creşte în timp datoritădeteriorării operei vii.
În practică, creşterea rezistenţei datorată vremii depinde de curent, vânt, precum şi demărimea valurilor, unde cel din urmă factor are o mare pondere.
9.4.2. Elicea ca organ propulsor
Organul folosit în mod uzual pentru propulsia navei este o elice, câteodată două,şi foarte rar mai mult de două. Forţa necesară elicei pentru propulsia navei cu viteza v este în mod normal, mult mai mare decât rezistenţa la înaintare RT iar condiţiile de curgere vor fi explicate în continuare. În fig.9.11 sunt prezentate forţele, vitezele, puterile şi parametrii care au relevanţă în procesul de deplasare a navei.

MAŞINI ŞI INSTALAŢII NAVALE 243
VITEZE Viteza navei vViteza curentului aspirat Av
în discul elicei Viteza în siajul navei W Av v v= −
Coeficientul de siaj ( )AW v v v= −FORŢERezistenţa la înaintare RTForţa de împingere TRezultanta forţei de împingere TF T R= −
Coeficientul de împingere TT Rt
T−
=
PUTERI Puterea de remorcare E TP R v= ×Puterea la elice T E HP P= ηPuterea la axul portelice D T BP P= ηPuterea la flanşa maşinii de propulsie B D SP P= ηRANDAMENTE
Randamentul corpului navei (carenei) H1 t
1 W−
η =−
Randamentul relativ de rotaţie RηRandamentul propulsorului în apă calmă 0ηRandamentul propulsorului în condiţii normale B 0 Rη = η ⋅η
de funcţionare Randamentul de propulsie D H Bη = η ⋅ηRandamentul liniei de arbori SηRandamentul total Tη
E E T DT H B S H 0 R S
B T D B
P P P PP P P P
η = = ⋅ ⋅ = η ⋅η ⋅η = η ⋅η ⋅η ⋅η
Fig.9.11 Propulsia navelor

244 Florin Nicolae
a) Condiţiile curgerii la elice
a1. Coeficientul de siaj Când nava se află în mişcare, frecarea apei de carenă va da naştere unui strat
limită în jurul acesteia. În acest strat limită, viteza apei de la suprafaţa de contact este egală cu viteza navei, dar descreşte pe măsură ce creşte distanţa faţă de navă. La o anume distanţă, egală prin definiţie cu grosimea stratului limită, viteza apei este nulă.
Grosimea stratului limită creşte odată cu deplasarea de la prova spre pupa, şi va avea valoarea maximă în dreptul pupei navei, grosimea acestuia fiind aproape proporţională cu lungimea navei. Aceasta înseamnă că va exista o viteză turbionarădatorată frecării în ambele borduri. În acelaşi timp, apa dislocată de navă în mişcarea ei va da naştere unor valuri de siaj atât la prova cât şi la pupa. Aceasta înseamnă că elicea va funcţiona într-un câmp turbionar.
Din această cauză, şi în special datorită turbioanelor, curentul de apă la elice va avea o viteză efectivă turbionară Wv , care are aceeaşi direcţie cu viteza navei v (fig.9.11). Aceasta înseamnă că viteza curentului aspirat Av de elice ( egală cu viteza de înaintare a elicei ) este cu Wv mai mică decât viteza navei v.
W Av =v-v (9.14) Viteza turbionară la elice poate fi exprimată adimensional cu ajutorul
coeficientului de siaj w:
W Av v vwv v
−= = (9.15)
Av 1 wv= − (9.16)
valoarea acestui coeficient depinde în mare măsură de forma corpului navei dar şi de poziţia elicei şi dimensiunea ei, şi are o mare influenţă asupra randamentului elicei.
Diametrul elicei d , sau mai precis, raportul între acesta şi lungimea navei WLL are influenţă asupra coeficientului de siaj pentru că d/LWL
ne poate indica
randamentul elicei în câmpul turbionar al carenei. Deci, cu cât raportul d/LWL este mai mare, cu atât w va fi mai mic.
Coeficientul de siaj creşte când suprafaţa operei vii a fost deteriorată. Încercarea de a evita aceasta se face cu ajutorul unor noi vopseluri pentru carenă ( care sunt toxice) pentru a preveni creşterea algelor pe carenă.
Pentru navele cu o singură elice, coeficientul de siaj w se află în intervalul 0,20 – 0,45 corespunzător unor viteze ale curentului Av de 0,55-0,80 din viteza navei v. Navele cu un coeficient bloc mare vor avea de asemenea un coeficient w mare. La navele cu douăelici, acestea vor fi în mod normal amplasate în afara stratului limită, motiv pentru care coeficientul w va fi, în acest caz, mult mai redus.

MAŞINI ŞI INSTALAŢII NAVALE 245
Câteodată, un coeficient w mare măreşte riscul apariţiei fenomenului de cavitaţie, din cauză că distribuţia vitezelor particulelor de apă pe elice este neuniformă.
Un câmp de distribuţie mult mai omogen, precum şi o viteză mai mare a curentului aspirat Av , pot fi obţinute în mai multe moduri, de ex. amplasând elicele în spatele unor scuturi. Evident, cea mai bună metodă este asigurarea, încă din stadiul proiectării navei, a unei forme a părţii imerse pupa astfel încât câmpul turbionar obţinut să fie optim.
a2. Calculul coeficientului de sucţiune Rotaţia elicei face ca apa dinaintea elicei să fie aspirată şi apoi refulată în spatele
acesteia. Aceasta înseamnă că forţa T trebuie să învingă rezistenţa navei RT cât şi“pierderea de împingere” F.
Aceasta poate fi exprimată adimensional funcţie de coeficientul de sucţiune t, care este definit astfel:
TT RFtT T
−= = (9.17)
TR 1 tT
= − (9.18)
În general, mărimea coeficientului de sucţiune t creşte odată cu creşterea coeficientul de siaj w. Forma carenei poate avea o influenţă semnificativă, de ex. o pupăbombată poate, în condiţiile deplasării cu viteze mici, să reducă coeficientul t.
Mărimea coeficientului t pentru o navă cu o elice este, în mod normal, cuprins între 0,12 - 0,30, iar o navă cu un coeficient bloc mare are un coeficient de sucţiune mai mare. Pentru navele cu două elici, coeficientul de sucţiune va fi mult redus datorităfaptului că aspirarea apei apare mai departe de carenă.
b) Randamente
b1. Randamentul carenei ηHRandamentul carenei este definit ca fiind raportul dintre puterea
efectivă E TP =R v ⋅ , şi puterea dezvoltată de elice T AP =T v ⋅ :
TE T
HAT A
RP R v 1 tT
vP T v 1 wv
⋅ −η = = = =
⋅ −(9.9)
Pentru o navă cu o singură elice, Hη este 1,1-1,4 , având valori mari la navele cu un coeficient bloc mare. Pentru navele cu două elici, Hη este aprox. 0,95-1,05.

246 Florin Nicolae
b2. Randamentul elicei în apă calmă η0Acesta se referă la funcţionarea elicei într-un câmp turbionar omogen fără a fi
situată în faţa/spatele carenei. Randamentul elicei depinde în special de viteza curentului aspirat Av , de forţa de
împingere T, turaţia n, diametrul d, forma elicei (numărul de pale şi suprafaţa elicei) şiraportul pas/diametru. Randamentul 0η poate varia între 0,35-0,75 , cu valori mari pentru elicele cu Av mari. În fig.9.12 este prezentată dependenţa lui 0η în funcţie de viteza de avans Av ,prin intermediul avansului relativ:
AvJn d
=⋅
(9.20)
b3. Randamentul relativ de rotaţie ηRCurentul aspirat nu are viteza constantă şi nici liniile de curent nu au acelaşi
unghi ca şi unghiul de înclinare al palei elicei, conferindu-i acesteia un caracter turbionar. De aceea, faţă de funcţionarea elicei singure, randamentul acesteia este influenţat de randamentul relativ de rotaţie - Rη .
La navele cu o singură elice, acesta ia valori între 1,0-1,07 cu alte cuvinte, curentul turbionar are un efect benefic. La navele cu două elici Rη este aproximativ 0,98. În combinaţie cu w şi t, Rη este deseori folosit pentru a corecta rezultatele obţinute pe modele.
b4. Randamentul elicei funcţionând în spatele navei ηB
Raportul între puterea dezvoltată de elice TP şi puterea DP , cu care este acţionată elicea, se numeşte randamentul pentru condiţii normale de exploatare Bη şi este definit astfel:
TB 0 R
D
PP
η = = η ⋅η (9.21.)
b5. Randamentul de propulsie ηD
Acesta nu trebuie confundat cu 0η şi este egal cu raportul dintre puterea de remorcare EP şi puterea dezvoltată la elice DP :
E E TD H B H 0 R
D T D
P P PP P P
η = = ⋅ = η ⋅η = η ⋅η ⋅η (9.22)
MAŞINI ŞI INSTALAŢII NAVALE 247
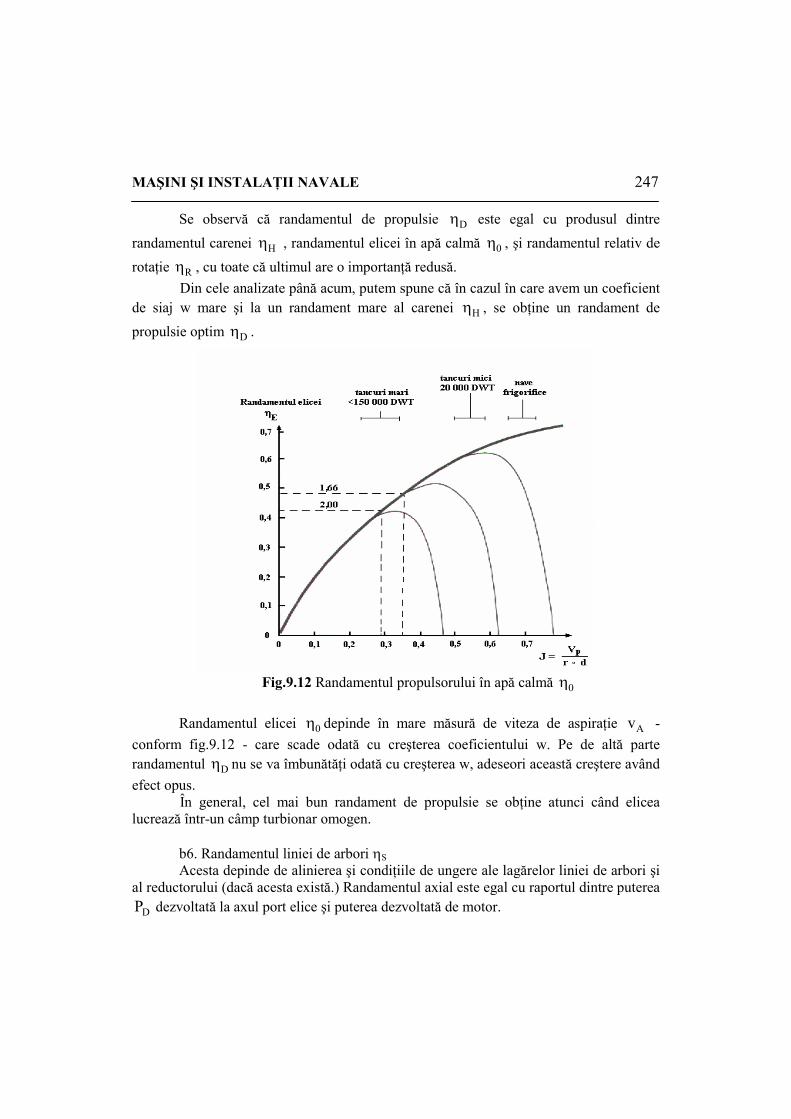
Se observă că randamentul de propulsie Dη este egal cu produsul dintre randamentul carenei Hη , randamentul elicei în apă calmă 0η , şi randamentul relativ de rotaţie Rη , cu toate că ultimul are o importanţă redusă.
Din cele analizate până acum, putem spune că în cazul în care avem un coeficient de siaj w mare şi la un randament mare al carenei Hη , se obţine un randament de propulsie optim Dη .
Fig.9.12 Randamentul propulsorului în apă calmă 0η
Randamentul elicei 0η depinde în mare măsură de viteza de aspiraţie Av -conform fig.9.12 - care scade odată cu creşterea coeficientului w. Pe de altă parte randamentul Dη nu se va îmbunătăţi odată cu creşterea w, adeseori această creştere având efect opus. În general, cel mai bun randament de propulsie se obţine atunci când elicea lucrează într-un câmp turbionar omogen.
b6. Randamentul liniei de arbori ηSAcesta depinde de alinierea şi condiţiile de ungere ale lagărelor liniei de arbori şi
al reductorului (dacă acesta există.) Randamentul axial este egal cu raportul dintre puterea DP dezvoltată la axul port elice şi puterea dezvoltată de motor.

248 Florin Nicolae
DS
B
PP
η = (9.23)
Randamentul liniei de arbori este aproximativ 0,985 , dar poate varia între 0,96 şi 0,995.
b7. Randamentul total ηT
Acesta este definit ca raportul dintre puterea de remorcare EP şi puterea dezvoltată de motor BP , exprimată astfel:
ET H 0 R S
B
PP
η = = η ⋅η ⋅η ⋅η (9.24)
c) Dimensiunile elicei
c1. Diametrul elicei d Pentru a obţine cel mai mare randament de propulsie ηηηηD, va fi preferat în mod
normal cel mai mare diametru posibil al elicei. Trebuie avute în vedere câteva condiţii speciale. De ex., forma carenei la pupa poate varia în funcţie de tipul navei, sau, o altăcondiţie, distanţa necesară între elice şi carenă va depinde de tipul elicei. Pentru vrachiere şi tancuri, care navigă balastate, este necesară impunerea unei limite pentru dimensiunile elicei, pentru ca aceasta să fie complet imersă.
Această limită nu este valabilă pentru port-containere care navigă rareori balastate. Nu se poate stabili, aşadar, un raport exact între diametrul d şi pescajul T, dar rapoartele de mai jos vor avea ca rezultat o turaţie scăzută n.
- Vrachier şi tancuri petroliere
d 0,65T
≤
- Port-container
d 0,74T
≤
Din motive tehnice, diametrul elicei nu va depăşi în general 8,5 m , deşi cea mai mare elice construită are un diametru de aproape 12 m.
c2. Numărul de pale Elicele pot fi fabricate cu 2, 3, 4, 5 sau 6 pale. Cu cât acest număr este mai mic,
cu atât va creşte randamentul elicei. Cu toate acestea, din motive de rezistenţă, elicele suprasolicitate nu pot avea numai două sau trei pale.
Elicele cu 2 pale sunt folosite la nave mici, iar cele cu 4, 5 sau 6 pale la nave mari. Navele cu motoare în doi timpi sunt în general nave mari care folosesc elice cu 4 pale. Navele cu un necesar de putere relativ mare (port-containere), pot avea nevoie de elici cu 5-6 pale.

MAŞINI ŞI INSTALAŢII NAVALE 249
c3. Raportul de disc Acesta – întâlnit în literatura de specialitate ca “blade area ratio” – defineşte
raportul dintre suprafaţa elicei şi suprafaţa discului acesteia, (în mod uzual o valoare de 0,55 este considerată bună.) Raportul de disc al unei elici tradiţionale cu 4 pale nu are importanţă, deoarece o valoare mare va conduce numai la o creştere a rezistenţei elicei şiprin urmare la un efect nesemnificativ.
Pentru nave cu elici suprasolicitate (5-6 pale), raportul de disc poate avea o valoare mai mare, iar la navele militare poate ajunge până la 1,2.
c4. Raportul pas/diametru (p/d) Acesta exprimă raportul dintre pasul elicei p şi diametrul său d, fig.9.13. Pasul p
este distanţa pe care un punct de pe elice o parcurge prin apă, la o rotaţie completă,neglijând alunecarea.
Obţinerea celui mai bun randament de propulsie pentru un diametru dat şi un raport p/d optim se obţine pentru o valoare particulară a turaţiei. Dacă, de ex., se doreşte o turaţie redusă, raportul p/d trebuie mărit şi viceversa. Pe de altă parte, dacă se doreşte o turaţie mică şi pescajul navei este corespunzător, alegerea unui diametru mare al elicei poate permite o turaţie redusă în acelaşi timp cu creşterea randamentului de propulsie.
d) Coeficienţii elicei J, KT, KQ.Condiţii de funcţionare ale elicei Teoria elicelor este bazată pe modele, dar este uşurată de folosirea unor
coeficienţi adimensionali ai elicei care depind de diametrul d, turaţia n şi densitatea apei ρ. Trei dinte cei mai importanţi coeficienţi sunt menţionaţi mai jos. Avansul la elice J este expresia adimensională a vitezei de aspiraţie VA.
J= AvJn d
=⋅
(9.25)
Forţa de împingere T este exprimată adimensional cu ajutorul coeficientului de împingere KT:
T 2 4TK
n d=
ρ⋅ ⋅(9.26)
şi momentul la elice:
DPQ2 n
=π⋅
este exprimat adimensional cu ajutorul coeficientului de moment KQ
Q 2 5QK
n d=
ρ⋅ ⋅(9.27)

250 Florin Nicolae
Randamentul elicei 0η poate fi calculat cu ajutorul coeficienţilor de mai sus, pentru că, aşa cum am precizat anterior, randamentul elicei 0η este definit ca :
T A T0
D Q
P T v K JP Q 2 n K 2
⋅η = = = ⋅
⋅ π ⋅ π(9.28)
Cu ajutorul diagramelor de elice care conţin curbele J, KT şi KQ, se pot determina dimensiunile elicei, randamentul, puterea, etc.
În cele ce urmează vom face câteva precizări asupra condiţiilor de funcţionare ale elicelor navale.
d1. Raportul de alunecare S Dacă nu ar exista alunecarea prin apă a elicei, înseamnă că aceasta ar înainta cu o
viteză p n⋅ , unde n este turaţia, iar p este pasul elicei. Totuşi, pentru că apa are o reacţie proprie, viteza reală de înaintare a elicei este
mai mică şi este egală cu viteza navei v, iar alunecarea aparentă poate fi exprimată ca p n v⋅ − .Raportul de alunecare aparentă SA, este adimensional, exprimat ca:
Ap n v vS 1
p n p n⋅ −
= = −⋅ ⋅
(9.29)
Raportul de alunecare aparent SA, furnizează informaţii utile despre sarcina ce acţionează asupra elicei pentru diferite condiţii de operare. Raportul creşte atunci când nava înaintează cu vânt şi valuri din prova, navigă în ape puţin adânci, carena nu este curăţată şi când nava accelerează.
Raportul de alunecare real va fi mai mare decât cel aparent pentru că viteza de aspiraţie VA este mai redusă decât viteza navei V. Raportul de alunecare real SR, care ne furnizează o imagine reală despre funcţionarea elicei este :
( )A
Rv 1 wvS 1 1
p n p n⋅ −
= − = −⋅ ⋅
(9.30)
La probele la cheu, unde viteza navei este 0, ambele rapoarte sunt egale cu 1,0. (câteodată, rapoartele sunt exprimate procentual).
d2. Legea de funcţionare a elicei Din cele prezentate anterior rezultă că rezistenţa R, pentru viteze mici ale navei,
este proporţională cu pătratul vitezei ( 2R=c v⋅ , unde c este o constantă). Necesarul de putere pe mare este, deci, proporţional cu cubul vitezei v: 3P=R v=c v⋅ ⋅ (9.31) Pentru nave cu elice cu pas fix , viteza v va fi proporţională cu turaţia n şi deci : 3P=c n⋅ (9.32)
MAŞINI ŞI INSTALAŢII NAVALE 251
d3. Legea de funcţionare a elicei pentru carenă necurăţatăAceastă lege poate fi aplicată numai pentru aceleaşi condiţii de funcţionare a
navei. Când, de ex., opera vie a navei este necurăţată (şi deci mult mai rugoasă), câmpul turbionar va fi diferit de cel al unei nave cu carenă nudă – cazul probelor de mare.
O navă cu o carenă necurăţată va fi supusă, în consecinţă, unei rezistenţesuplimentare care va da naştere unei suprasolicitări a elicei – la aceeaşi putere, turaţia va fi mai redusă. Legea de funcţionare se va expune grafic printr-o curbă diferită de cazul în care carena este nudă. Aceleaşi consideraţii se vor aplica şi atunci când nava navigă pe omare montată, împotriva curentului, a vântului puternic, unde rezistenţa de val (în special) poate da naştere unor suprasolicitări asupra elicei. Pe de altă parte, dacă nava este balastată, având un deplasament mic, curba legii de funcţionare a elicei va fi mai lină – la aceeaşi putere dezvoltată la elice, turaţia acesteia va fi mai mare.
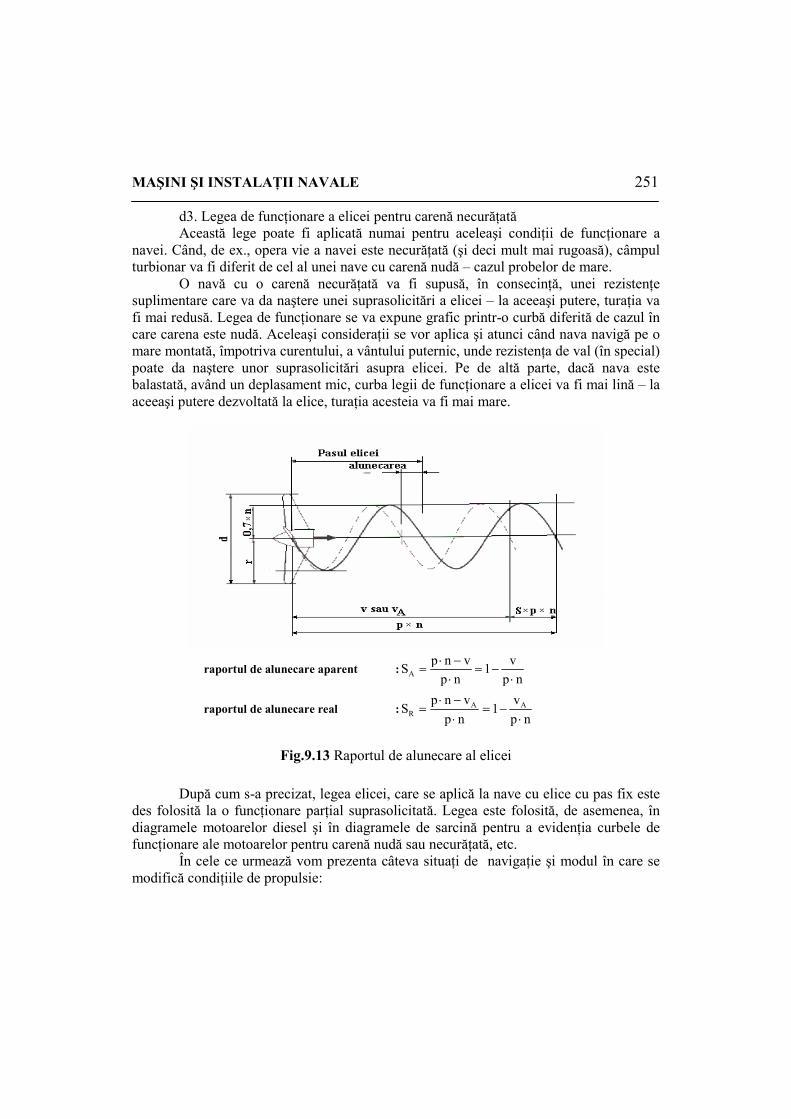
raportul de alunecare aparent : Ap n v vS 1
p n p n⋅ −
= = −⋅ ⋅
raportul de alunecare real : A AR
p n v vS 1
p n p n⋅ −
= = −⋅ ⋅
Fig.9.13 Raportul de alunecare al elicei
După cum s-a precizat, legea elicei, care se aplică la nave cu elice cu pas fix este des folosită la o funcţionare parţial suprasolicitată. Legea este folosită, de asemenea, în diagramele motoarelor diesel şi în diagramele de sarcină pentru a evidenţia curbele de funcţionare ale motoarelor pentru carenă nudă sau necurăţată, etc.
În cele ce urmează vom prezenta câteva situaţi de navigaţie şi modul în care se modifică condiţiile de propulsie:
252 Florin Nicolae
1. Navigaţia pe valuri mari Când se navigă pe valuri mari, cu rezistenţă de val mare, solicitarea asupra elicei
creşte cu 3-4% decât pe mare liniştită, la aceeaşi putere la elice, turaţia va fi cu 3-4% mai redusă. Pe de altă parte, în unele cazuri reale cu vânt puternic din prova, procentajul poate fi şi mai mare. Pentru a evita oscilaţiile verticale ale navei şi deci avarierea pupei şi a elicei, viteza navei va fi redusă de ofiţerul de cart.
2. Accelerarea navei Când o navă accelerează, elicea va fi mult mai solicitată decât în cazul unui marş
cu viteză constantă. Puterea necesară va fi deci mult mai mare decât pentru marş cu vitezăconstantă şi motorul va funcţiona supraturat.
3. Navigaţia în zone cu ape puţin adânci Când se navigă în ape puţin adânci, rezistenţa reziduală a navei va creşte şi elicea
va fi suprasolicitată faţă de cazul în care se navigă la larg.
4. Influenţa deplasamentului Când se navigă cu nava încărcată, volumul apei dizlocuite va varia cu până la
10% în plus sau în minus funcţie de cazul de încărcare. Aceasta creşte desigur rezistenţala înaintare şi puterea necesară la elice, dar are o mică influenţă asupra curbei elicei. Pe de altă parte, când o navă este balastată, volumul de apă dizlocuit este mult redus faţă de cazul de mai sus, şi curba elicei va avea o pantă cu 3% mai redusă, iar turaţia va creşte cu 3%.
5. Navigaţia cu viteza de siguranţă Sub o anumită viteză, numită de siguranţă, efectul de guvernare al cârmei va fi
insuficient din cauza vitezei reduse a curentului. Este destul de dificil de precizat o vitezăde siguranţă, pentru că viteza curentului depinde de alunecarea apei pe pala elicei.
Deseori este precizată o viteză de siguranţă de 3,5-4,5 Nd. Potrivit legii de funcţionare a elicei va fi necesară o putere scăzută de propulsie care va fi mai mare pe vreme nefavorabilă datorită creşterii rezistenţei la înaintare.
6. Valorificarea efectului de guvernare al elicei Când o navă se află în mişcare, presiunea pe palele superioare va fi mai redusă
decât pe cele inferioare. Acest efect de guvernare creşte cu cât apa este mai puţin adâncă(ex: în timpul manevrelor din porturi).
De aceea, o elice pas dreapta va abate pupa navei în tribord. Acest efect poate fi contracarat cu ajutorul cârmei.

MAŞINI ŞI INSTALAŢII NAVALE 253
Când maşina este pusă pe marş înapoi (de ex. la acostare), efectul de guvernare al elicei va avea un sens opus şi va creşte cu cât viteza navei va scade. Cunoaşterea acestor lucruri este foarte importantă în special în situaţii critice şi în timpul manevrelor portuare.
Potrivit unor autori, atunci când maşina funcţionează la marş înapoi, partea superioară a curentului respins, care este rotativ, loveşte pupa navei.
Pilotul trebuie să cunoască exact cum va reacţiona nava în situaţiile date. De aceea se obişnuieşte ca navele cu o singură elice cu pas fix să aibă elice pas dreapta. Motorul cuplat direct la elice se va roti de asemenea spre dreapta.
Pentru a obţine acelaşi efect de guvernare când se pune maşina înapoi, în cazul navelor cu elice cu pas reglabil, acestea sunt proiectate cu pas stânga.
9.4.3. Diagramele de funcţionare ale motoarelor şi diagramele de sarcină
După cum se cunoaşte, puterea dezvoltată de un motor diesel PB este proporţională cu presiunea medie efectivă pe şi turaţia motorului n. Folosind c ca pe o constantă, PB poate fi exprimat astfel: B eP =c p n⋅ ⋅ (9.33) sau, altfel spus, pentru o presiune medie efectivă pe constantă, puterea este proporţionalăcu turaţia: BP c n ⋅∼ (9.34) Aşa cum s-a menţionat mai sus – când navigăm cu o elice cu pas fix – puterea, în concordanţă cu legile elicei, poate fi exprimată ca: 3
BP =c n ⋅ (9.35) (legea de funcţionare a elicei).
Aşadar, pentru ex de mai sus, puterea motorului PB poate fi exprimată ca o funcţie exponenţială a turaţiei n la puterea i: i
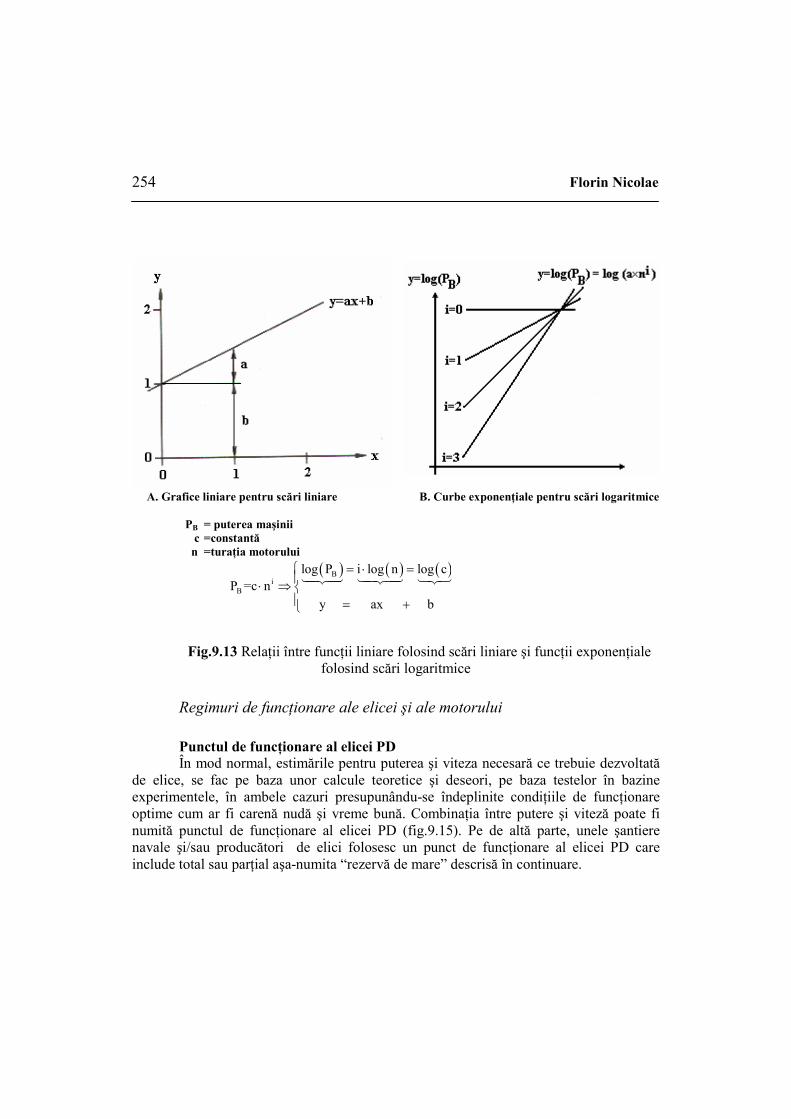
BP =c n⋅ (9.36) Fig.9.14 demonstrează legătura dintre funcţia liniară y=ax+b , vezi (A), folosind
scări liniare şi funcţiile exponenţiale iBP =c n⋅ , vezi (B), folosind scări logaritmice.
Funcţiile exponenţiale vor deveni liniare când se folosesc scări logaritmice ca: Blog (P )=i log (n) +log (c)⋅ (9.37) care este echivalentă cu ecuaţia dreptei : y=ax + b (9.38)
Prin urmare, curbele elicei vor fi paralele cu liniile care au o înclinare i=3, şiliniile pentru presiunea efectivă ep , vor fi paralele cu liniile care au o înclinare i=1.
În concluzie, pentru diagramele motorului şi pentru diagramele de sarcinădescrise mai jos, se folosesc scări logaritmice, rezultând diagrame simple cu linii drepte.
254 Florin Nicolae
A. Grafice liniare pentru scări liniare B. Curbe exponenţiale pentru scări logaritmice
PB = puterea maşinii c =constantă
n =turaţia motorului
( ) ( ) ( )B
iB
log P i log n log cP =c n
y ax b
= ⋅ =⋅ ⇒ = +
����� ����� ���
Fig.9.13 Relaţii între funcţii liniare folosind scări liniare şi funcţii exponenţiale folosind scări logaritmice
Regimuri de funcţionare ale elicei şi ale motorului
Punctul de funcţionare al elicei PD În mod normal, estimările pentru puterea şi viteza necesară ce trebuie dezvoltată
de elice, se fac pe baza unor calcule teoretice şi deseori, pe baza testelor în bazine experimentele, în ambele cazuri presupunându-se îndeplinite condiţiile de funcţionare optime cum ar fi carenă nudă şi vreme bună. Combinaţia între putere şi viteză poate fi numită punctul de funcţionare al elicei PD (fig.9.15). Pe de altă parte, unele şantiere navale şi/sau producători de elici folosesc un punct de funcţionare al elicei PD care include total sau parţial aşa-numita “rezervă de mare” descrisă în continuare.
MAŞINI ŞI INSTALAŢII NAVALE 255
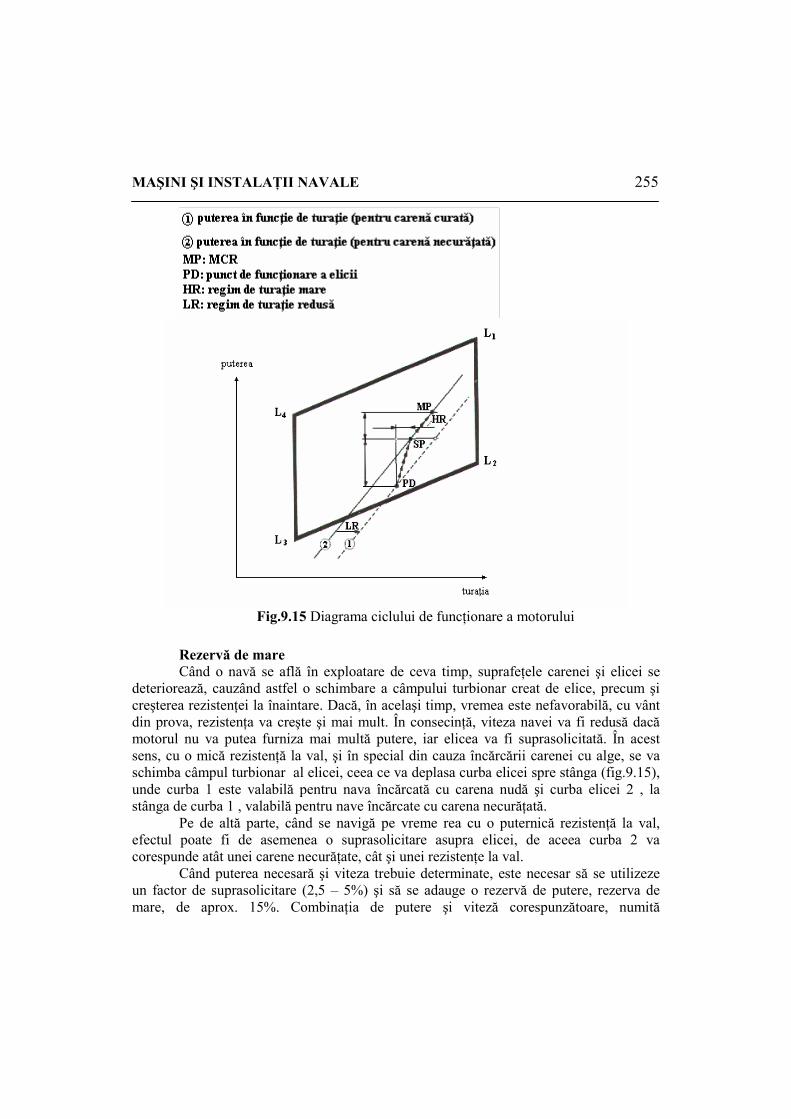
Fig.9.15 Diagrama ciclului de funcţionare a motorului
Rezervă de mare Când o navă se află în exploatare de ceva timp, suprafeţele carenei şi elicei se
deteriorează, cauzând astfel o schimbare a câmpului turbionar creat de elice, precum şicreşterea rezistenţei la înaintare. Dacă, în acelaşi timp, vremea este nefavorabilă, cu vânt din prova, rezistenţa va creşte şi mai mult. În consecinţă, viteza navei va fi redusă dacămotorul nu va putea furniza mai multă putere, iar elicea va fi suprasolicitată. În acest sens, cu o mică rezistenţă la val, şi în special din cauza încărcării carenei cu alge, se va schimba câmpul turbionar al elicei, ceea ce va deplasa curba elicei spre stânga (fig.9.15), unde curba 1 este valabilă pentru nava încărcată cu carena nudă şi curba elicei 2 , la stânga de curba 1 , valabilă pentru nave încărcate cu carena necurăţată.
Pe de altă parte, când se navigă pe vreme rea cu o puternică rezistenţă la val, efectul poate fi de asemenea o suprasolicitare asupra elicei, de aceea curba 2 va corespunde atât unei carene necurăţate, cât şi unei rezistenţe la val.
Când puterea necesară şi viteza trebuie determinate, este necesar să se utilizeze un factor de suprasolicitare (2,5 – 5%) şi să se adauge o rezervă de putere, rezerva de mare, de aprox. 15%. Combinaţia de putere şi viteză corespunzătoare, numită
256 Florin Nicolae randamentul propulsiei pentru serviciu continuu SP, pentru carenă necurăţată, conţine o anumită “alunecare” şi “suprasolicitare” comparativ cu curba elicei 1 pentru carenă nudă.
Factor de funcţionare normală fLRCurba elicei pentru carenă necurăţată (şi valuri mari), poate fi folosită ca bază
pentru curba de funcţionare, curba 2, în timp ce curba elicei 1 poate fi folosită în cazul navelor noi. Factorul de funcţionare normală LRf , care, pentru aceeaşi putere dezvoltatăla elice, este definit ca procentul de creştere al turaţiei n comparativ cu cel de la o navă cu carenă necurăţată:
nudă necurăţatăLR
necurăţată
n nf 100%
n−
= × (9.39)
Rezerva de motor În afară de rezerva de mare, puterea este suplimentată cu aşa numita rezervă de
motor de aprox. 10%. Punctul corespunzător numit MCR specific propulsiei MP, face referire la faptul că puterea în punctul SP este cu 10% mai scăzută decât în punctul MP. Acesta este identic cu punctul MCR (M), excepţie făcând atunci cânt un generator este instalat pe axul motorului principal. În acest caz trebuie avută în vedere o creştere a necesarului de putere. Funcţionarea maşinii principale de propulsie împreună cu regimurile aferente vor fi tratate în cadrul punctului 9.5.4.
9.5. INSTALAŢII DE PROPULSIE CU MOTOARE CU ARDERE INTERNĂ
Instalaţiile de propulsie de acest tip au fost realizate la început cu motoare cu aprindere prin comprimare MAC, ireversibile, cu transmisie electrică a energiei între motorul termic şi propulsor. Primul motor naval reversibil, prezentat la expoziţia mondială de la Milano din anul 1906, avea patru cilindri şi dezvolta 90 CP la 375 rot/min.
Comparând sistemele de propulsie cu MAC, cu instalaţiile de propulsie cu turbine cu vapori se constată urmatoarele:
a)consumul de combustibil este mai redus, de unde va rezulta o economicitate mai mare decât SPTV;
b) cheltuielile necesare pentru reviziile generale periodice sunt mai mici cu 40…50% la sistemele cu MAC;
c) costul precum şi cheltuielile de exploatare al sistemelor cu MAC, având puteri( 10000 - 30000kW), sunt mai mici decât ale SPTV. La puteri mai mari de 30000 kW, SPTV devin mai economice;
d) durata necesară pentru punerea în funcţiune a sistemului cu MAC poate fi de 10…30 minute, iar la SPTV poate fi de 1…3 ore;
e) posibilitatea apariţiei incendiilor şi a producerii exploziilor este mult mai micăla navele cu MAC, datorită inexistenţei subsistemului de generare a vaporilor;
MAŞINI ŞI INSTALAŢII NAVALE 257
f) sistemele de propulsie cu MAC produc zgomote şi vibraţii mult mai puternice decat SPTV.
Datorită avantajelor tehnice şi economice pe care le prezintă sistemele de propulsie cu MAC, atât numărul navelor dotate cu astfel de instalaţii cât şi puterea motoarelor navale a evoluat continuu, în prezent aceste instalaţii devenind preponderente în propulsia navală.
În ultimii ani în funcţie de turaţia arborelui motor, s-au conturat două tipuri principale de instalaţii de propulsie:
a) cu motor lent, cuplat direct cu propulsorul; b) cu motoare semirapide, cuplate prin reductor cu propulsorul. Dintre sistemele de propulsie cu MAC, preponderente ca număr şi putere, sunt
cele cu motoare lente, în doi timpi, care au urmatoarele avantaje: a)cuplarea directă, cu arborele port-elice, permite realizarea unor sisteme de
propulsie mai simple şi mai sigure în funcţionare, care sunt preferate de beneficiari; b) putere mare pe un singur motor, până la circa 45000 kW; c)durata de funcţionare între două revizii capitale este mai mare; d) folosirea combustibililor grei este mai simplă decât la sistemele cu motoare
semirapide. Ca dezavantaje ale acestor instalaţii se pot menţiona: masa pe unitate de putere şi
volumul compartimentului de maşini sunt mult mai mari în comparaţie cu cele ale sistemelor cu motoare semirapide.
Comparativ cu sistemele de propulsie cu motoare lente, instalaţiile de propulsie cu motoare semirapide au urmatoarele avantaje şi dezavantaje:
a) avantaje certe:- masa şi volumul compartimentului de maşini pe unitate de putere sunt
mai reduse cu circa 40…50%; - costul instalaţiei este mai mic cu circa 10 – 15%; - posibilitatea antrenării generatoarelor electrice de către motoarele
principale, ceea ce reduce atât costul energiei electrice cât şi numarul grupurilor auxiliare diesel-generatoare;
- pot fi realizate sisteme de propulsie într-o gamă mare de puteri, cu un singur tip de motor, prin alegerea numărului de cilindri pentru un motor şi a numărului de motoare pentru un sistem de propulsie;
- uzura cilindrilor, a segmenţilor de piston şi a pistoanelor produsă într-o mie de ore de funcţionare este mai mică la motoarele semirapide în patru timpi;
- posibilităţi mai bune pentru amplasarea raţională a compartimentului de maşini la bordul navei;
- introducerea mai simplă a motoarelor în compartimentul maşini; b) avantaje discutabile:
- siguranţa în exploatare a sistemului de propulsie cu mai multe motoare; - organizarea mai bună a întreţinerii, în special în cazul sistemelor automatizate cu două sau mai multe motoare;
- consumul de combustibil mai redus.
258 Florin Nicolae
c) dezavantaje:- întreţinerea supapelor de evacuare, mai dificilă;- la aceeaşi putere, număr mai mare de cilindri, deci mai multe
posibilităţi de apariţie a defecţiunilor, inclusiv mai multe piese de schimb necesare la bordul navei;
- cerinţe mai riguroase privind calitatea combustibilului; - nivelul zgomotului mai înalt. În general instalaţiile de propulsie cu MAC sunt montate pe toate tipurile de
nave, începând de la şalupe, având puteri instalate de numai câteva zeci de kilowaţi pânăla cele mai mari nave de transport, ca: petroliere, mineraliere, nave port-container etc, care au sisteme de propulsie cu puteri de 40000 – 50000 kW, sau chiar mai mult.
Motorul cu ardere internă cu piston este o maşină termică ce transformă energia chimică a combustibilului, prin ardere în interiorul cilindrilor, în lucru mecanic transmis pistoanelor în mişcare alternativă. Mecanismele bielă-manivelă transformă mişcarea alternativă a pistoanelor în mişcare de rotaţie a arborelui motor.
Motoarele cu ardere internă cu piston instalate la bordul navelor pot fi clasificate după criteriile:
a) procedeul de aprindere:- motoare cu aprindere prin comprimare, la care aprinderea se datoreşte
temperaturii conţinutului din cilindru, rezultată numai din comprimarea acestuia. Motoarele navale cu ardere internă sunt în marea lor majoritate cu aprindere prin comprimare MAC denumite diesel (după numele inginerului Rudolf Diesel);
- motoare cu cap de aprindere la care aprinderea are loc datoritătemperaturii conţinutului din cilindru, dar şi temperaturii locale a unui perete cald. Astfel de motoare sunt mai rar folosite la nave;
- motoare cu aprindere prin scânteie MAS la care aprinderea este efectuată de la o scânteie electrică.
b) felul combustibilului folosit:- motoare care utilizează combustibil lichid cu o vâscozitate medie
(motorină); - motoare navale care utilizează combustibil lichid “greu” cu vâscozitate mare (păcură); - motoare navale care consumă combustibil lichid cu vâscozitate mică(benzină, petrol sau alcool); - motoare cu gaz şi injecţie pilot, care se pot întâlni la navele ce transportă gaze lichefiate. La ambarcaţiunile mici se folosesc şi motoare alimentate cu benzină.
c) procedeul de răcire:- motoare răcite cu apă, instalate atât pentru propulsie cât şi ca auxiliare;
- motoare răcite cu aer, folosite mai rar, ca motoare auxiliare. d) modul de alimentare cu combustibil:
- motoare cu injecţie directă de combustibil, cu cameră de ardere nedivizată;
MAŞINI ŞI INSTALAŢII NAVALE 259
- motoare cu injecţie indirectă de combustibil, cu cameră de ardere divizată; ambele tipuri sunt folosite atât pentru propulsie cât şi ca auxiliare;
- motoare cu aspiraţie de combustibil întâlnite numai pentru ambarcaţiuni cu dimensiuni reduse.
f) modul de introducere a încărcăturii proaspete în cilindrii motorului:- cu aspiraţie naturală, motoare navale auxiliare de putere mică;- sunt alimentate prin turbosuflantă, cu răcire a încărcăturii proaspete,
fiind folosite pentru propulsie cât şi ca motoare auxiliare. g) construcţia mecanismului bielă-manivelă:
- cu mecanism bielă-manivelă fără cap de cruce; - cu cap de cruce, motoarele cu cap de cruce sunt în general de puteri
mari şi sunt prevăzute cu presetupă la partea inferioară a cilindrului. h) dispunerea cilindrilor:
- motoare navale verticale cu cilindri în linie; - cu cilindri în V; - cu cilindri în triunghi; - cu cilindri în X. Motoarele cu cilindri în W, H, în plan orizontal, stea, în
U sunt folosite în tracţiunea feroviară şi auto, în aviaţie etc. i) după viteza medie a pistonului:
- lente având viteza medie a pistonului, vmp ≤ 6,5 m/s; - semirapide vmp între 6,5 şi 10 m/s; - rapide, la care vmp>10 m/s. La nave sunt folosite motoare navale lente şi
semirapide; în mod excepţional pot fi întâlnite şi motoare rapide. j) rolul pe care îl îndeplinesc la bordul navei:
- motoare navale principale, folosite pentru propulsie; - motoare navale auxiliare, folosite pentru acţionarea generatoarelor
electrice sau a altor auxiliare. Motorul cu ardere internă cu piston este compus din: mecanismul motor – format
din piston, tijă-piston, bielă şi arbore cotit, ca organe principale mobile şi din părţile fixe, cilindru, chiulasă şi carter. Prin mecanismele de distribuţie a gazelor şi sistemul de alimentare cu combustibil, în cilindrul motorului se introduce energia care este supusătransformării. Instalaţiile auxiliare (de combustibil, ungere-răcire, pornire-oprire) asigurăcondiţiile necesare pentru funcţionarea motorului.
9.5.1. Ciclul teoretic generalizat al motoarelor cu ardere internă
Motorul cu ardere internă, cu piston, a fost conceput si realizat pentru a transforma energia termică (obţinută prin arderea combustibililor) în energie mecanică. În procesul de transformare, din întreaga energie introdusă q1, o parte este transformată în energie mecanică, iar cealaltă parte q2 – sub formă de caldură este eliminată în mediul înconjurător(cedată sursei reci). Pentru a uşura înţelegerea transformării energiei în MAI, se acceptă simplificarea fenomenelor prin introducerea de procese idealizate, care depind numai de anumite proprietăţi ale fluidului care evoluează în cilindrul motorului,
260 Florin Nicolae proprietăţi considerate ca fiind constante. Astfel se ajunge la noţiunea de ciclu ideal sau ciclu teoretic.
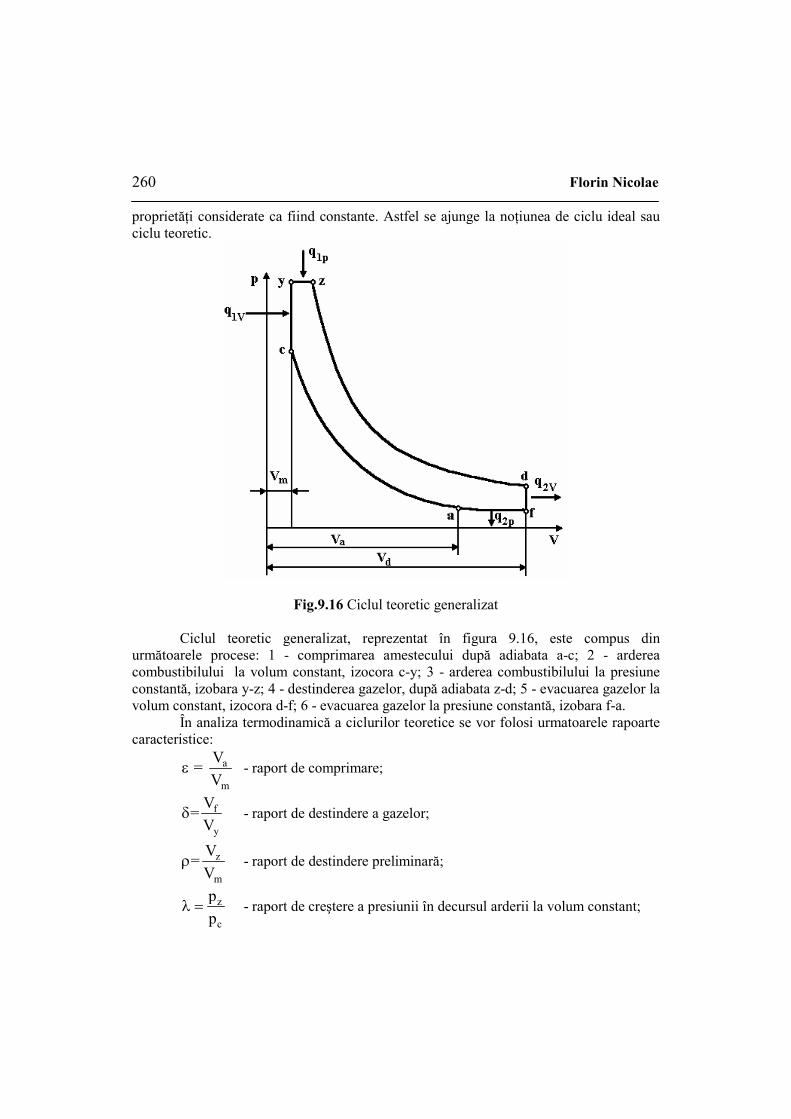
Fig.9.16 Ciclul teoretic generalizat
Ciclul teoretic generalizat, reprezentat în figura 9.16, este compus din următoarele procese: 1 - comprimarea amestecului după adiabata a-c; 2 - arderea combustibilului la volum constant, izocora c-y; 3 - arderea combustibilului la presiune constantă, izobara y-z; 4 - destinderea gazelor, după adiabata z-d; 5 - evacuarea gazelor la volum constant, izocora d-f; 6 - evacuarea gazelor la presiune constantă, izobara f-a.
În analiza termodinamică a ciclurilor teoretice se vor folosi urmatoarele rapoarte caracteristice:
a
m
V=V
ε - raport de comprimare;
f
y
V=V
δ - raport de destindere a gazelor;
z
m
V=V
ρ - raport de destindere preliminară;
z
c
pp
λ = - raport de creştere a presiunii în decursul arderii la volum constant;

MAŞINI ŞI INSTALAŢII NAVALE 261
d
f
pp
θ = - raport de coborâre a presiunii în timpul de evacuării la volum
constant; p
v
ck
c= - raportul căldurilor specifice (exponent adiabatic).
Aplicând relaţiile dintre parametrii termodinamici pentru transformările care alcătuiesc ciclul, se stabilesc urmatoarele expresii de calcul ale parametrilor de la începutul şi sfârşitul fiecărei transformări a ciclului teoretic generalizat, conform tabelului 9.5.
Randamentul termic al ciclului teoretic generalizat prin care se determină gradul de transformare a energiei din energie termică în energie mecanică va fi:
2t
1
| q |1q
η = − (9.40)
în care : 1 1V 1pq =q +q reprezintă cantitatea de energie introdusă în ciclu;
2 2V 2pq =q +q - cantitatea de energie cedată în ciclu. Cantităţile de energie q1 şi q2 în [kJ/kg] pot fi exprimate în funcţie de temperaturi
şi de căldurile specifice: ( )k 1
1 v aq C T 1 k 1−= ε λ − + λ ρ− ;
( )1 1 1 1k k k k
2 v aq C T 1 k
= ρλ θ− + ρλ −θ θ
Tabel 9.5 Parametrii ciclului teoretic generalizat
Nr. crt.
Punctul de
referinţăPresiunea Temperatura
0 1 2 31 a ap aT
2 c kc ap p= ⋅ ε k 1
c aT T −= ⋅ ε
3 y ky ap p= ⋅λ ⋅ε k 1
y aT T −= ⋅λ ⋅ε
4 z kz ap p= ⋅λ ⋅ε k 1
y aT T −= ⋅ρ ⋅ε
5 dk
d ap p ε = ⋅λ δ
k 1k 1k 1kk 1 Kd a k
d z z akz a
p pT T T Tp p
−−− θ ⋅
= = = ρλ θ ⋅λ ⋅ε
262 Florin Nicolae
6 f df a
pp p= =θ
1 Kdf
f d ad
TpT T Tp
λ = = = ρ θ θ Înlocuind în expresia randamentului termic (9.40), expresiile cantităţilor de
energie q1 şi q2 se obţine expresia randamentului termic al ciclului teoretic generalizat:
( )
( )
1 1 1k k k
t k 1 1k
1 k11
1 k 1−
ρλ θ− + ρλ −θ
η = − ⋅ε
θ λ − + λ ρ−
(9.41)
În expresia (9.41) randamentul termic al ciclului teoretic generalizat depinde de următorii factori: modul în care se introduce energia în motor (deci modul de desfăşurare a arderii combustibilului), realizat prin rapoartele λ şi ρ; după cum se face cedarea energiei (căldurii), modul cum se realizează evacuarea gazelor, caracterizat prin raportul θ; de raportul de comprimare ε; de proprietăţile fluidului motor (gazele care evoluează în cilindrul motorului) reprezentate prin raportul căldurilor specifice la presiune constantă şila volum constant (exponentul adiabatic), k.
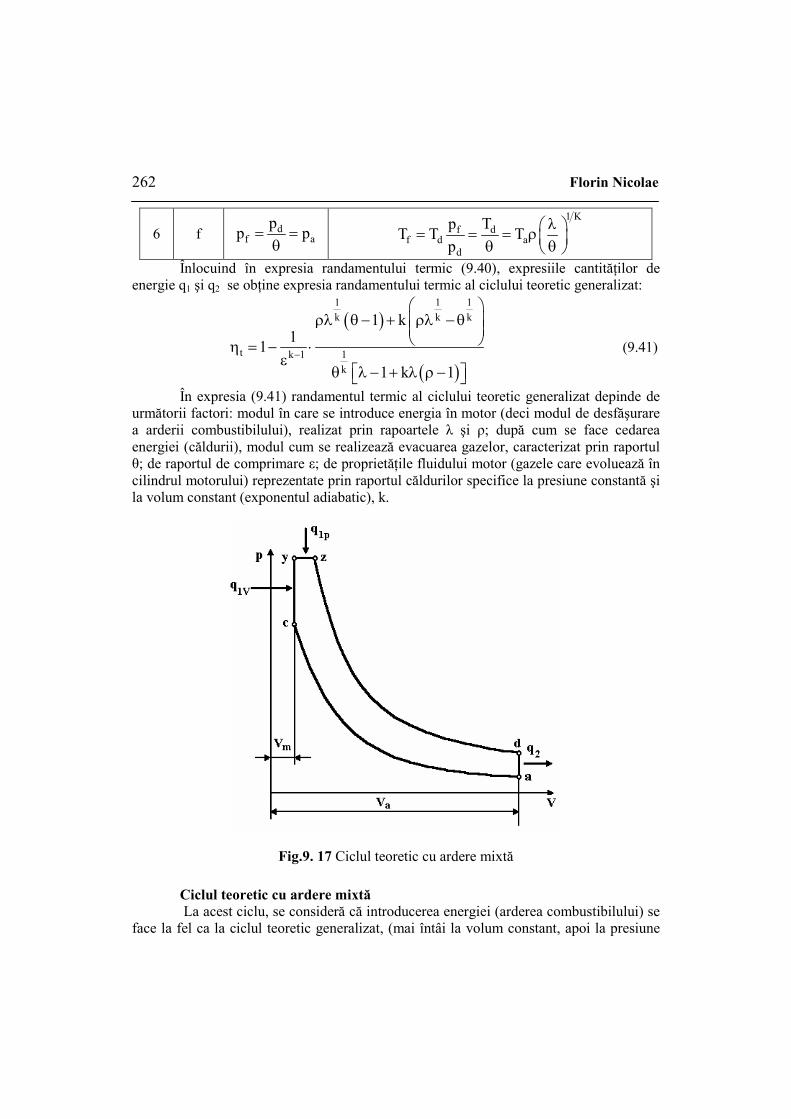
Fig.9. 17 Ciclul teoretic cu ardere mixtă
Ciclul teoretic cu ardere mixtăLa acest ciclu, se consideră că introducerea energiei (arderea combustibilului) se
face la fel ca la ciclul teoretic generalizat, (mai întâi la volum constant, apoi la presiune

MAŞINI ŞI INSTALAŢII NAVALE 263
constantă) însă cedarea energiei (adică evacuarea gazelor) se face numai la volum constant. La ciclul teoretic mixt, fig. 9.17, energia cedată (prin gazele evacuate) va fi:
2 v d a v a d aq =C (T -T )=C T (T /T -1).Folosind raportul θ şi ţinând seama de faptul că pentru izocora d-a există
egalitatea Vd=Va, se poate scrie:
1 k 1k k
d a d ap / p T / T−
θ = = = ρλ θde unde: kθ = λρ
Randamentul termic al acestui ciclu va fi:
( )
k
t k 11 11
1 k 1−λρ −
η = − ⋅λ − + λ ρ−ε
(9.42)
Conform expresiei (9.42), randamentul termic al ciclului teoretic cu ardere mixtădepinde de rapoartele ε, λ şi ρ, precum şi de natura fluidului motor, evidenţiată prin exponentul adiabatic k.
Ciclul teoretic cu introducerea energiei la volum constant Ciclul, cu introducerea energiei la volum constant, se obţine din ciclul teoretic cu
ardere mixtă prin suprimarea procesului y-z, de introducere a energiei 1pq , întreaga
energie 1q , introducându-se numai la volum constant. În acest fel punctul z ia locul punctului y. Deoarece atât introducerea energiei (arderea combustibilului) cât şi cedarea de energie (evacuarea gazelor) se face numai la volum constant în acest ciclu, reprezentat în fig. 9.18, rapoartele ρ şi δ devin:
z
m
V 1V
ρ = = si d d
s m
V VV V
δ = = = ε
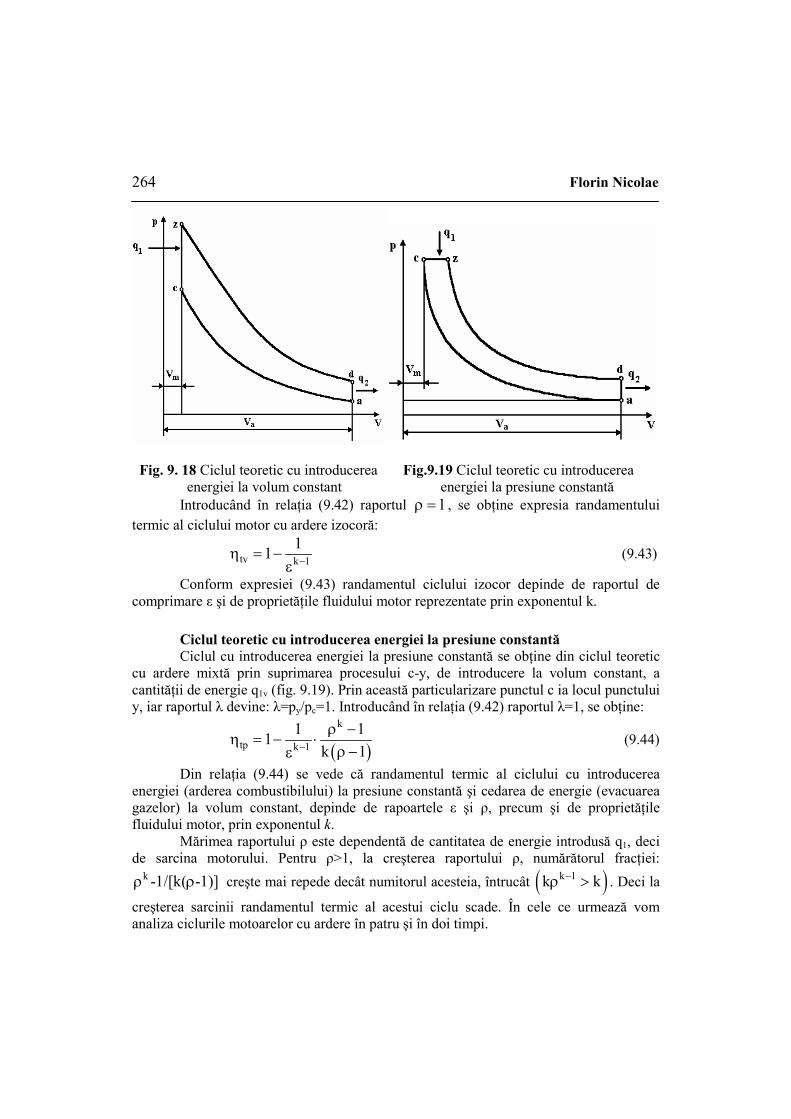
264 Florin Nicolae
Fig. 9. 18 Ciclul teoretic cu introducerea Fig.9.19 Ciclul teoretic cu introducerea energiei la volum constant energiei la presiune constantă
Introducând în relaţia (9.42) raportul 1ρ = , se obţine expresia randamentului termic al ciclului motor cu ardere izocoră:
tv k 111 −η = −
ε(9.43)
Conform expresiei (9.43) randamentul ciclului izocor depinde de raportul de comprimare ε şi de proprietăţile fluidului motor reprezentate prin exponentul k.
Ciclul teoretic cu introducerea energiei la presiune constantăCiclul cu introducerea energiei la presiune constantă se obţine din ciclul teoretic
cu ardere mixtă prin suprimarea procesului c-y, de introducere la volum constant, a cantităţii de energie q1v (fig. 9.19). Prin această particularizare punctul c ia locul punctului y, iar raportul λ devine: λ=py/pc=1. Introducând în relaţia (9.42) raportul λ=1, se obţine:
( )
k
tp k 11 11
k 1−ρ −
η = − ⋅ρ −ε
(9.44)
Din relaţia (9.44) se vede că randamentul termic al ciclului cu introducerea energiei (arderea combustibilului) la presiune constantă şi cedarea de energie (evacuarea gazelor) la volum constant, depinde de rapoartele ε şi ρ, precum şi de proprietăţile fluidului motor, prin exponentul k.
Mărimea raportului ρ este dependentă de cantitatea de energie introdusă q1, deci de sarcina motorului. Pentru ρ>1, la creşterea raportului ρ, numărătorul fracţiei:
k -1/[k( -1)] ρ ρ creşte mai repede decât numitorul acesteia, întrucât ( )k 1k k−ρ > . Deci la
creşterea sarcinii randamentul termic al acestui ciclu scade. În cele ce urmează vom analiza ciclurile motoarelor cu ardere în patru şi în doi timpi.

MAŞINI ŞI INSTALAŢII NAVALE 265
9.5.2. Transformarea energiei de către motorul în patru timpi Motorul cu ardere internă în patru timpi, prezentat schematic în fig.9.20,
funcţionează în modul următor: în cilindrul 1 pătrunde aer (sau amestec de aer şicombustibil) prin canalul şi orificiul supapei de admisie s.a., din momentul în care presiunea gazelor arse rămase în cilindru (gaze reziduale) devine mai mică decât presiunea mediului exterior, p0. pistonul 2 se deplasează de la punctul mort interior PMI, la punctul mort exterior PME, efectuând cursa de admisie , respectiv timpul unu al ciclului. Supapa de admisie trebuie deschisă cu un anumit avans (punctul dsa) şi închisăcu o anumită întârziere (punctul îsa), în momentul când presiunea gazelor din cilindru devine egală cu presiunea mediului exterior. Variaţia presiunii din cilindru în timpul acestei curse este arătată prin curba r-a.
Amestecul de gaze închis în cilindrul motorului este comprimat, teoretic, în timp ce pistonul se deplasează de la PME, la PMI, efectuând cursa de comprimare, respectiv timpul doi al ciclului funcţional. În timpul acesta, presiunea variază după curba a-b-c. Procesul real de comprimare începe după închiderea supapei de admisie, şi se termină în momentul începerii arderii combustibilului (punctul A). Injecţia combustibilului începe către sfârşitul cursei de comprimare (punctul b), cu un anumit avans, deci mai înainte ca pistonul să ajungă la PMI. Arderea, la început, produce creşterea rapidă a presiunii (A-c-y), după care urmează arderea cu o variaţie mică a presiunii (y-z) şi apoi arderea ulterioară (z-z΄).
Teoretic destinderea gazelor se produce în timp ce pistonul se deplasează de la PMI, la PME, efectuând cursa de destindere, respectiv timpul trei. La începutul destinderii presiunea variază lent (y-z), după care urmează scăderea presiunii după curba (z-z΄-f). Destinderea gazelor arse are loc până în momentul deschiderii supapei de evacuare (dse). În timpul acestei curse energia gazelor de ardere este transmisă pistonului (prin destindere gazele împing pistonul de la PMI, la PME). Timpul trei fiind unicul timp în care are loc transformarea energiei termice în energie mecanică.
266 Florin Nicolae
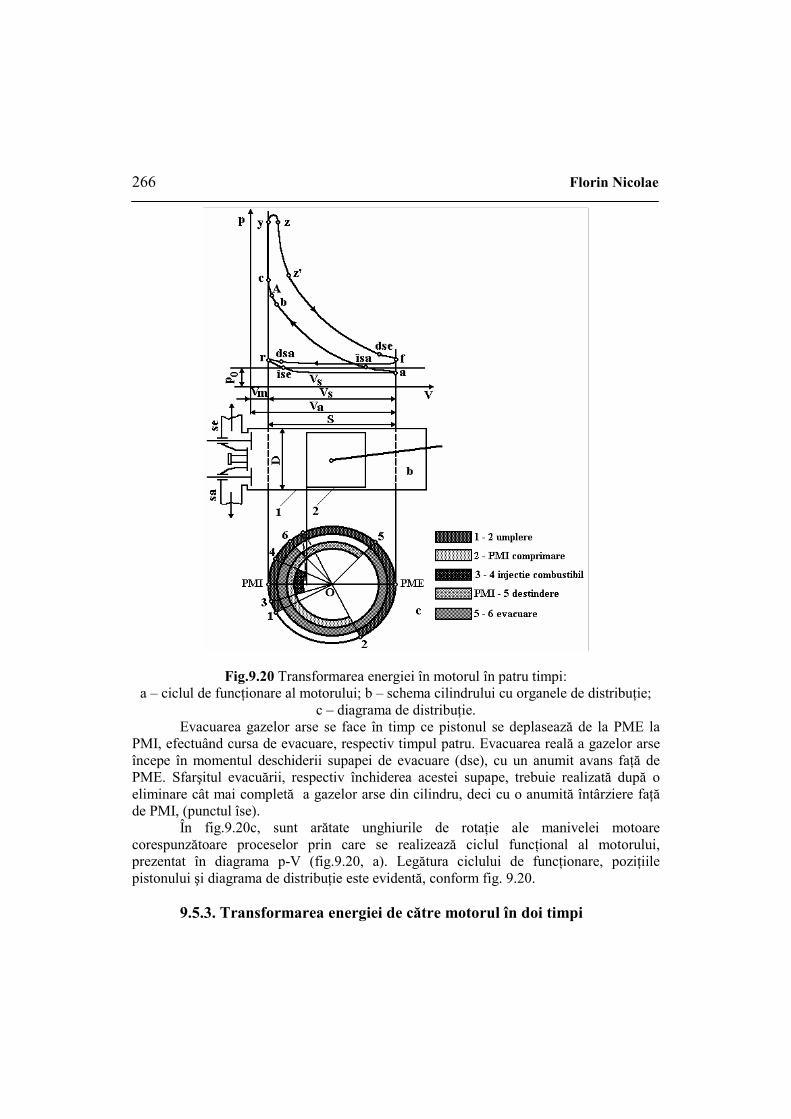
Fig.9.20 Transformarea energiei în motorul în patru timpi: a – ciclul de funcţionare al motorului; b – schema cilindrului cu organele de distribuţie;
c – diagrama de distribuţie. Evacuarea gazelor arse se face în timp ce pistonul se deplasează de la PME la
PMI, efectuând cursa de evacuare, respectiv timpul patru. Evacuarea reală a gazelor arse începe în momentul deschiderii supapei de evacuare (dse), cu un anumit avans faţă de PME. Sfarşitul evacuării, respectiv închiderea acestei supape, trebuie realizată după oeliminare cât mai completă a gazelor arse din cilindru, deci cu o anumită întârziere faţă de PMI, (punctul îse). În fig.9.20c, sunt arătate unghiurile de rotaţie ale manivelei motoare corespunzătoare proceselor prin care se realizează ciclul funcţional al motorului, prezentat în diagrama p-V (fig.9.20, a). Legătura ciclului de funcţionare, poziţiile pistonului şi diagrama de distribuţie este evidentă, conform fig. 9.20.
9.5.3. Transformarea energiei de către motorul în doi timpi

MAŞINI ŞI INSTALAŢII NAVALE 267
La motorul în doi timpi (fig.9.21), evacuarea gazelor arse începe în momentul (doe), când pistonul deschide orificiile de evacuare 4, executate în peretele cilindrului, sau se deschide supapa de evacuare, prin care gazele arse trec în colectorul de evacuare. Aceste ferestre sunt deschise de pistonul 2 în timp ce acesta se deplasează de la PMI, la PME. La începutul evacuării, gazele se scurg din cilindru datorită diferenţei mari dintre presiunea gazelor arse şi presiunea din colectorul de evacuare (evacuare liberă). Ulterior, pistonul deschide orificiile (punctul dob) de baleiaj 3, prin care aerul (sau amestecul de aer şi combustibil) precomprimat la o presiune pb, superioară celei exterioare, pătrunde în cilindrul motorului. Din momentul deschiderii orificiilor de baleiaj şi până în momentul închiderii acestora, evacuarea gazelor se face datorită împingerii lor de către aerul proaspăt care pătrunde în cilindru (evacuare foţată).
Închiderea orificiilor de baleiaj se face de către piston în timp ce acesta se deplasează de la PME, la PMI. În deplasarea sa ulterioară spre PMI, pistonul închide orificiile de evacuare (punctul îoe), sau se închide supapa de evacuare.
În perioada în care orificiile de baleiaj 3 şi orificiile de evacuare 4, sunt închise între (îoe) şi (doe) au loc urmatoarele procese: comprimarea amestecului iniţial, când presiunea variază după curba (a-b-A); aprinderea (punctul A) şi arderea combustibilului cu creşterea rapidă a presiunii după curba (A-c-y); continuarea arderii şi destinderii gazelor arse când presiunea evoluează după curba (y-z-z΄-d). Aceste procese se desfăşoară la fel ca la motorul în patru timpi.
Prin urmare, la ciclul motorului în doi timpi, procesul de evacuare a gazelor arse se desfăşoară în cea mai mare parte simultan cu procesul de umplere a cilindrului. Datorităacestei suprapuneri, precum şi a reducerii cursei efective de comprimare şi de destindere a gazelor, ciclul se realizează într-o singură rotaţie a arborelui cotit, respectiv în douăcurse ale pistonului, de unde şi denumirea de ciclu în doi timpi.
268 Florin Nicolae
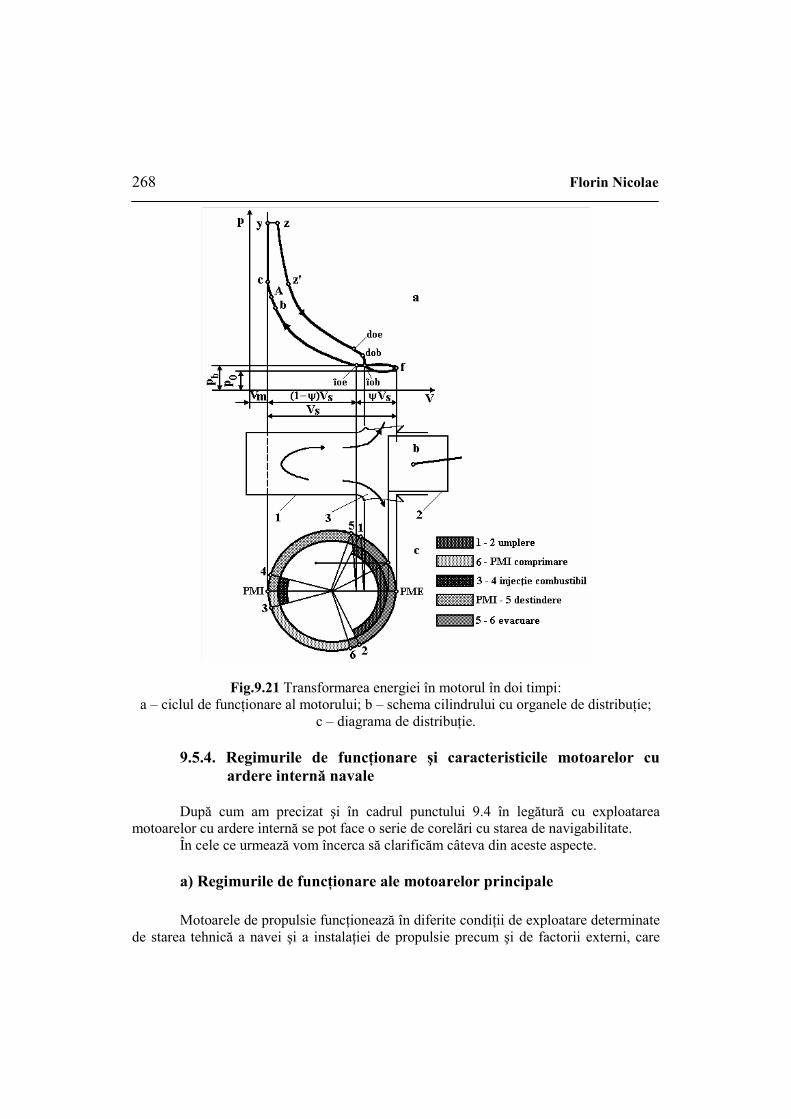
Fig.9.21 Transformarea energiei în motorul în doi timpi: a – ciclul de funcţionare al motorului; b – schema cilindrului cu organele de distribuţie;
c – diagrama de distribuţie.
9.5.4. Regimurile de funcţionare şi caracteristicile motoarelor cu ardere internă navale
După cum am precizat şi în cadrul punctului 9.4 în legătură cu exploatarea
motoarelor cu ardere internă se pot face o serie de corelări cu starea de navigabilitate. În cele ce urmează vom încerca să clarificăm câteva din aceste aspecte. a) Regimurile de funcţionare ale motoarelor principale
Motoarele de propulsie funcţionează în diferite condiţii de exploatare determinate de starea tehnică a navei şi a instalaţiei de propulsie precum şi de factorii externi, care
MAŞINI ŞI INSTALAŢII NAVALE 269
influenţează funcţionarea. În ansamblul lor condiţiile de exploatare, reliefate prin indicatorii de putere, economicitate, solicitări termice, mecanice şi altele, caracterizeazăregimul de funcţionare al motorului naval de propulsie.
Regimul de funcţionare al motorului de propulsie, depinde de: tipul navei, condiţiile de navigaţie, construcţia corpului navei, tipul propulsorului şi al modului de transmitere a energiei de la motor la propulsor. Cunoaşterea regimului de funcţionare permite studierea corespunzătoare a alegerii diferitelor componente ale sistemului de propulsie.
Regimurile de funcţionare ale motoarelor de propulsie se împart în: regimuri permanente sau staţionare şi regimuri nepermanente sau nestaţionare. Regimul permanent se caracterizează prin: sarcină, turaţie şi solicitări termice şi mecanice ale organelor motorului constante, în limitele de variaţie datorate sistemelor de reglare. Pentru regimul nepermanent este caracteristică variaţia în limite largi a factorilor menţionaţi.
Pentru aprecierea regimului de funcţionare al motorului se folosesc indicii energetici, economici şi de exploatare. Ca indici energetici şi economici se admit: puterea efectivă, puterea indicată, momentul motor, presiunea medie efectivă şi presiunea medie indicată, turaţia, consumul specific de combustibil, efectiv şi indicat. Ca indici de exploatare se pot menţiona mărimile presiunii, ale temperaturii stabilite la probele prototipului şi unii parametri suplimentari care permit estimarea solicitărilor termice şimecanice ale motorului principal.
Motoarele de propulsie, în exploatare, sunt folosite la următoarele puteri: - puterea maximă, e maxP , este puterea cea mai mare pe care o poate dezvolta
motorul pe durată limitată (1-2 ore) - Engine Maxim Continuous Rating (MCR). - putere nominală, e nomP reprezintă puterea pe care o dezvoltă motorul timp
îndelungat; durata de funcţionare la puterea nominală este prescrisă de uzina constructoare. e nomP este puterea de calcul, iar motorul trebuie să poată prelua o anumităsuprasarcină, de circa 10%, adică e max e nomP 1,1 P= ⋅ (rezerva de putere).
- puterea de exploatare, e expP , este puterea pe care poate să o dezvolte motorul
fără restricţie asupra duratei de funcţionare; în mod curent ( )eexp e nomP 0,85 0,9 P≅ − .Puterea de exploatare este dezvoltată de motorul principal la regimul de viteză
nominală al navei. Pentru navele flotei comerciale regimul de putere, corespunzător vitezei nominale a navei, se realizează în cea mai mare durată de timp din întreaga duratăde exploatare a unui an de zile.
- puterea economică, e ecP , este puterea la care motorul funcţionează cu consum specific minim de combustibil; obişnuit, puterea economică reprezintă circa 80-85% din puterea nominală (Economy Ratings);
- puterea minimă, e minP , este puterea pe care o dezvoltă motorul la deplasarea navei cu viteză minimă; puterea minimă reprezintă circa 3-12% din puterea nominală.
La instalaţiile de propulsie cu EPF, la care motorul principal este cuplat direct cu propulsorul, turaţia arborelui motor, la regimul prevăzut, se stabileşte din condiţia
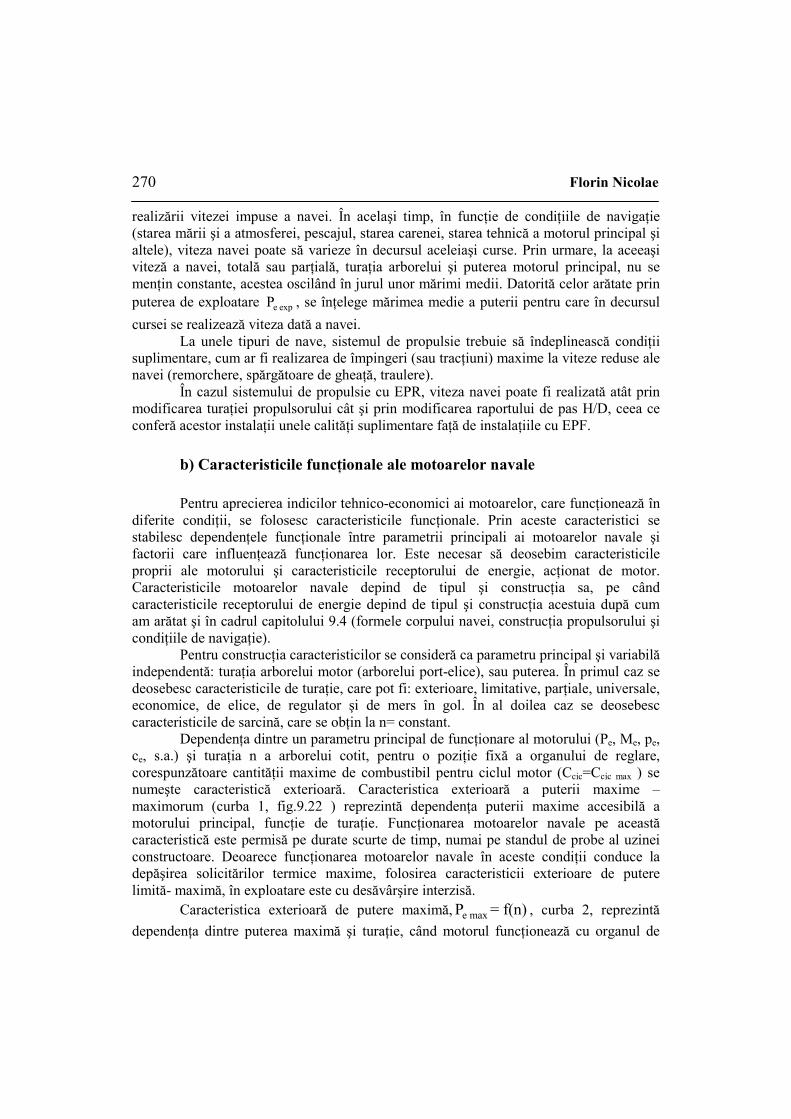
270 Florin Nicolae realizării vitezei impuse a navei. În acelaşi timp, în funcţie de condiţiile de navigaţie (starea mării şi a atmosferei, pescajul, starea carenei, starea tehnică a motorul principal şialtele), viteza navei poate să varieze în decursul aceleiaşi curse. Prin urmare, la aceeaşiviteză a navei, totală sau parţială, turaţia arborelui şi puterea motorul principal, nu se menţin constante, acestea oscilând în jurul unor mărimi medii. Datorită celor arătate prin puterea de exploatare e expP , se înţelege mărimea medie a puterii pentru care în decursul cursei se realizează viteza dată a navei.
La unele tipuri de nave, sistemul de propulsie trebuie să îndeplinească condiţii suplimentare, cum ar fi realizarea de împingeri (sau tracţiuni) maxime la viteze reduse ale navei (remorchere, spărgătoare de gheaţă, traulere).
În cazul sistemului de propulsie cu EPR, viteza navei poate fi realizată atât prin modificarea turaţiei propulsorului cât şi prin modificarea raportului de pas H/D, ceea ce conferă acestor instalaţii unele calităţi suplimentare faţă de instalaţiile cu EPF.
b) Caracteristicile funcţionale ale motoarelor navale Pentru aprecierea indicilor tehnico-economici ai motoarelor, care funcţionează în
diferite condiţii, se folosesc caracteristicile funcţionale. Prin aceste caracteristici se stabilesc dependenţele funcţionale între parametrii principali ai motoarelor navale şifactorii care influenţează funcţionarea lor. Este necesar să deosebim caracteristicile proprii ale motorului şi caracteristicile receptorului de energie, acţionat de motor. Caracteristicile motoarelor navale depind de tipul şi construcţia sa, pe când caracteristicile receptorului de energie depind de tipul şi construcţia acestuia după cum am arătat şi în cadrul capitolului 9.4 (formele corpului navei, construcţia propulsorului şicondiţiile de navigaţie).
Pentru construcţia caracteristicilor se consideră ca parametru principal şi variabilăindependentă: turaţia arborelui motor (arborelui port-elice), sau puterea. În primul caz se deosebesc caracteristicile de turaţie, care pot fi: exterioare, limitative, parţiale, universale, economice, de elice, de regulator şi de mers în gol. În al doilea caz se deosebesc caracteristicile de sarcină, care se obţin la n= constant.
Dependenţa dintre un parametru principal de funcţionare al motorului (Pe, Me, pe,ce, s.a.) şi turaţia n a arborelui cotit, pentru o poziţie fixă a organului de reglare, corespunzătoare cantităţii maxime de combustibil pentru ciclul motor (Ccic=Ccic max ) se numeşte caracteristică exterioară. Caracteristica exterioară a puterii maxime – maximorum (curba 1, fig.9.22 ) reprezintă dependenţa puterii maxime accesibilă amotorului principal, funcţie de turaţie. Funcţionarea motoarelor navale pe aceastăcaracteristică este permisă pe durate scurte de timp, numai pe standul de probe al uzinei constructoare. Deoarece funcţionarea motoarelor navale în aceste condiţii conduce la depăşirea solicitărilor termice maxime, folosirea caracteristicii exterioare de putere limită- maximă, în exploatare este cu desăvârşire interzisă.
Caracteristica exterioară de putere maximă, e maxP = f(n) , curba 2, reprezintădependenţa dintre puterea maximă şi turaţie, când motorul funcţionează cu organul de
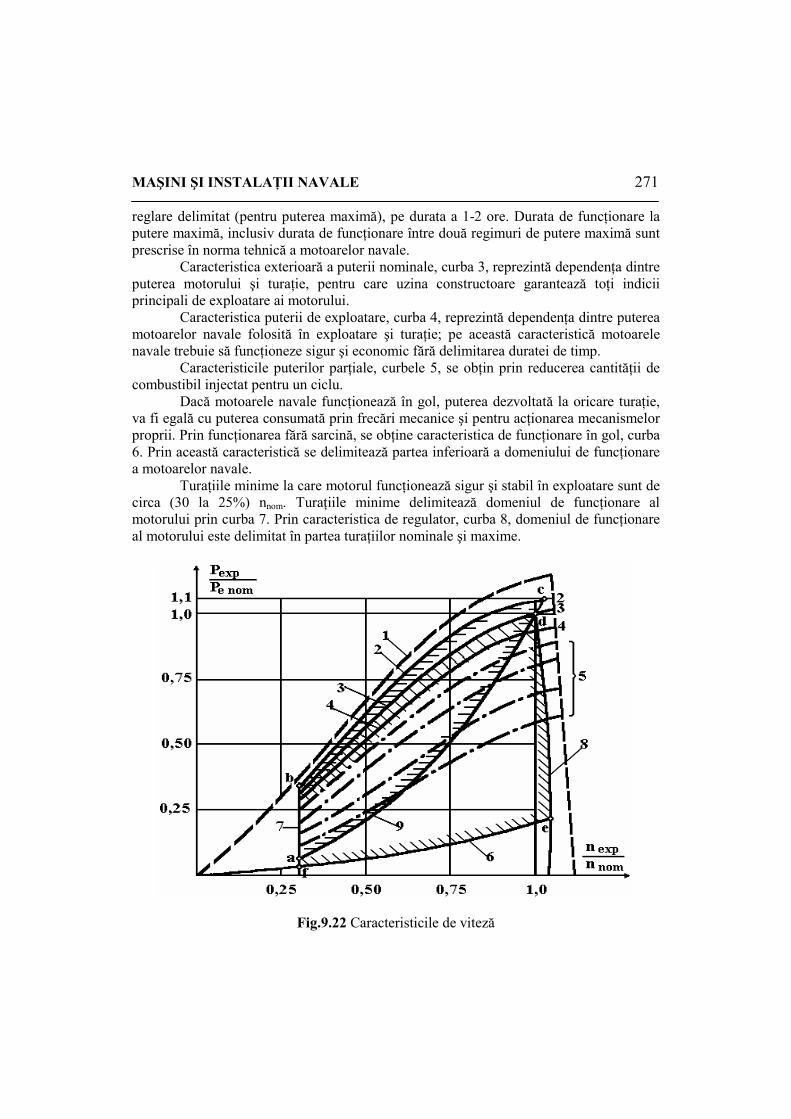
MAŞINI ŞI INSTALAŢII NAVALE 271
reglare delimitat (pentru puterea maximă), pe durata a 1-2 ore. Durata de funcţionare la putere maximă, inclusiv durata de funcţionare între două regimuri de putere maximă sunt prescrise în norma tehnică a motoarelor navale.
Caracteristica exterioară a puterii nominale, curba 3, reprezintă dependenţa dintre puterea motorului şi turaţie, pentru care uzina constructoare garantează toţi indicii principali de exploatare ai motorului.
Caracteristica puterii de exploatare, curba 4, reprezintă dependenţa dintre puterea motoarelor navale folosită în exploatare şi turaţie; pe această caracteristică motoarele navale trebuie să funcţioneze sigur şi economic fără delimitarea duratei de timp.
Caracteristicile puterilor parţiale, curbele 5, se obţin prin reducerea cantităţii de combustibil injectat pentru un ciclu.
Dacă motoarele navale funcţionează în gol, puterea dezvoltată la oricare turaţie, va fi egală cu puterea consumată prin frecări mecanice şi pentru acţionarea mecanismelor proprii. Prin funcţionarea fără sarcină, se obţine caracteristica de funcţionare în gol, curba 6. Prin această caracteristică se delimitează partea inferioară a domeniului de funcţionare a motoarelor navale.
Turaţiile minime la care motorul funcţionează sigur şi stabil în exploatare sunt de circa (30 la 25%) nnom. Turaţiile minime delimitează domeniul de funcţionare al motorului prin curba 7. Prin caracteristica de regulator, curba 8, domeniul de funcţionare al motorului este delimitat în partea turaţiilor nominale şi maxime.
Fig.9.22 Caracteristicile de viteză
272 Florin Nicolae
9.6. INFLUENŢA PERFORMANŢELOR INSTALAŢIEI DE PROPULSIE ASUPRA EFICIENŢEI VOIAJULUI NAVELOR MARITIME
În actualele condiţii de criză ce caracterizează economia mondială şi având în
vedere perspectivele evoluţiei acestora, corelarea elementelor ce structurează transportul maritim şi în primul rând marşul apare ca o necesitate obiectivă a perioadei pe care o traversam. Această corelare constituie, în esenţa sa, o optimizare, în sensul realizării marşului în condiţiile cele mai economice şi sigure posibile, implicit a unui consum redus de combustibil din partea maşinilor principale de propulsie sau a maşinilor auxiliare. Regimul de marş – care caracterizează marşul - se defineşte ca atitudinea pe care trebuie, să o aibă nava în fiecare etapă caracteristică voiajului dat în funcţie de condiţiile de navigaţie, pentru a îndeplini misiunea de transport cu eficienţă şi siguranţă.
Elementele ce structurează regimul de marş sunt viteza şi drumul navei şi evident că alegerea lor joacă un rol important în exploatarea navei şi deci asupra rezultatelor acesteia.
9.6.1. Caracteristicile regimurilor de marş ale navelor maritime
Condiţiile economice şi cu precădere criza energetică, au determinat deja luarea unor măsuri adecvate în exploatarea navelor maritime de transport, care au ca scop economia de combustibil. În prezent acest lucru se realizează prin îndeplinirea misiunii de transport la viteze ce se pot obţine din puterea de propulsie rezultată prin utilizarea unei cantităţimedii zilnice de combustibil – alocate fiecărei nave, potrivit voiajului şi caracteristicilor sale şi care este normată pe baza consumurilor medii efective - determinate. Corelat cu aceasta sunt luate măsuri pentru a nu fi depăşite aceste consumuri normate, depăşiri care ar deriva din creşterea excesivă a rugozităţii carenei, etc. Regimul de marş care se adoptă trebuie să fie în corespondenţă cu condiţiile cuprinse în următoarele categorii:
a) Condiţii proprii navei: - caracteristicile navei – în deosebi lungimea, viteza, raportul lungime/
deplasament, coeficientul bloc precum si dotarea cu bulb în prova; - gradul de uzură a corpului şi aparatului propulsor – corelat cu vârsta navei; - starea carenei – exprimată prin gradul de rugozitate datorată în deosebi
depunerilor de vietăţi marine; - gradul (starea) de încărcare a navei, exprimat în procente din deplasamentul
maxim; - consumurile specifice ale motorului principal, diesel-generatoarelor şi
caldarinelor;

MAŞINI ŞI INSTALAŢII NAVALE 273
b) Condiţii exterioare navei; - starea hidrometeorelogică ( curenţi, vânt, valuri); - condiţii restricţionale generale; c) Condiţii specifice contractuale; - cu referire la efectuarea transportului; - cheltuielile ocazionate de efectuarea respectivului voiaj; În tratarea problemei, vor fi luaţi în consideraţie toţi aceşti factori în interacţiunea
lor, pentru a putea astfel discerne în fiecare moment caracteristic voiajului şi prin aceasta să determinăm regimul de marş ce trebuie adoptat.
Din rezumarea analizei factorilor ce joacă un rol în stabilirea criteriilor de optim, rezultă că acestea se pot grupa în două categorii:
- Criterii de optim de natură financiară – care îndrumă în general la efectuarea de cheltuieli minime.
- Criterii de optim de natură tehnică – care îndrumă la îndeplinirea misiunii de transport în condiţii de securitate pentru navă, marfă şi echipaj.
Criteriul fundamental de optim se constituie ca locul de interferenţă a celor douăcategorii, potrivit condiţiilor cadru de exploatare ce definesc un moment al voiajului.
Aceasta conduce la aceea că viteza şi drumul navei – în voiajul dat, trebuie săfacă posibilă realizarea transportului cu cost minim per tonă milă, în minimul de timp şiîn siguranţă.
Regimul de marş – cu caracter optimizat, va trebui să aibă anumite rezerve în capacitatea sa, pentru ca nava să poată face faţă rezolvării diferitelor situaţii cu care se confruntă.
In cele ce urmează vom prezenta câteva aspecte legate de exploatarea navelor comerciale. În acest sens dacă drept indicator al eficienţei exploatării va fi luatăproductivitatea tonajului, (P), exprimată prin relaţia:
s v t T ZP v c c T k k= ⋅ ⋅ ⋅ ⋅ ⋅unde:
sv – viteza de serviciu;
vc – coeficient de utilizare a vitezei;
Tc – coeficient de utilizare a tonajului; T – fondul de timp anual ( 365 zile);
Tk – coeficient de utilizare a fondului de timp anual ( zile exploatare );
Zk – raportul zile de marş / zile exploatare; Se constată că – doi sunt factorii ce vor fi analizaţi spre optimizare respectiv cei
care caracterizează regimul de marş şi anume sv – viteza de serviciu şi vc - coeficientul de utilizare a vitezei.
Ceilalţi factori care joacă de asemenea un rol important în determinarea valorii productivităţii, se tratează separat, prin politici adecvate problemelor respective.

274 Florin Nicolae
În această ordine de idei, subliniem de la început, că şi problema staţionării navelor trebuie tratată distinct de cea a vitezei şi aceasta cu atât mai mult cu cât perioadele de staţionare au un caracter aleatoriu şi de mărime importantă. De aceea o tendinţă de sporire a vitezei nu poate fi luată în consideraţie decât în contextul unor valori foarte mici ale perioadei de staţionare.
După cum arată şi literatura de specialitate, nu se poate aştepta nimeni la o recuperare a timpului pierdut în staţionare prin folosirea unei viteze mai mari, datorităfaptului că viteza rentabilă este invers proporţională cu raportul zile de staţionare – distanţa voiajului, aşa cum reiese din ecuaţia de gradul trei a vitezei rentabile:
2r r
vj c e N vj
NZS 8 Fv 1 16 vd 24 p c f d
⋅⋅ + ⋅ ⋅ = ⋅ ⋅ ⋅ ⋅
,
unde: rv - viteza rentabilă;
NZS - număr zile de staţionare; vjd - distanţa voiajului;
F - navlul net; cp - preţul combustibilului;
ec - consumul specific de combustibil;
Nf - factorul de putere; Se observă că partea dreaptă a egalităţii fiind constantă, în cazul creşterii valorii
lui NZS, rv trebuie să scadă.Pentru optimizarea vitezei de serviciu – sv s-a plecat de la câteva ipoteze: - puterea instalată este funcţie de viteză la puterea a treia ( N = fN v3 ); - consumul de combustibil este funcţie de consumul specific, putere şi timpul de
marş.eq = c N t⋅ ⋅
- timpul de marş este funcţie de rută (distanţă) şi invers proporţional cu viteza. t = d / v .O analiză globală a acestor parametri, ne arată că pentru o creştere a vitezei de la
simplu la dublu, este nevoie ca puterea să fie de opt ori mai mare şi în condiţiile înjumătăţirii timpului de marş (datorită vitezei de două ori mai mare) consumul de combustibil va fi de patru ori mai mare. O reprezentare grafică a celor de mai sus este redată în fig.9.23. Aceste adevăruri fac necesară o mai atentă şi mai chibzuită stabilire a vitezei de marş, respectiv găsirea unui echilibru între elementele tehnice şi economice ce se intercondiţionează în complexa activitate de exploatare a flotei. În această idee, un prim considerent este acela potrivit căruia – în condiţii normale – criteriile de naturăeconomică trebuie să prevaleze.
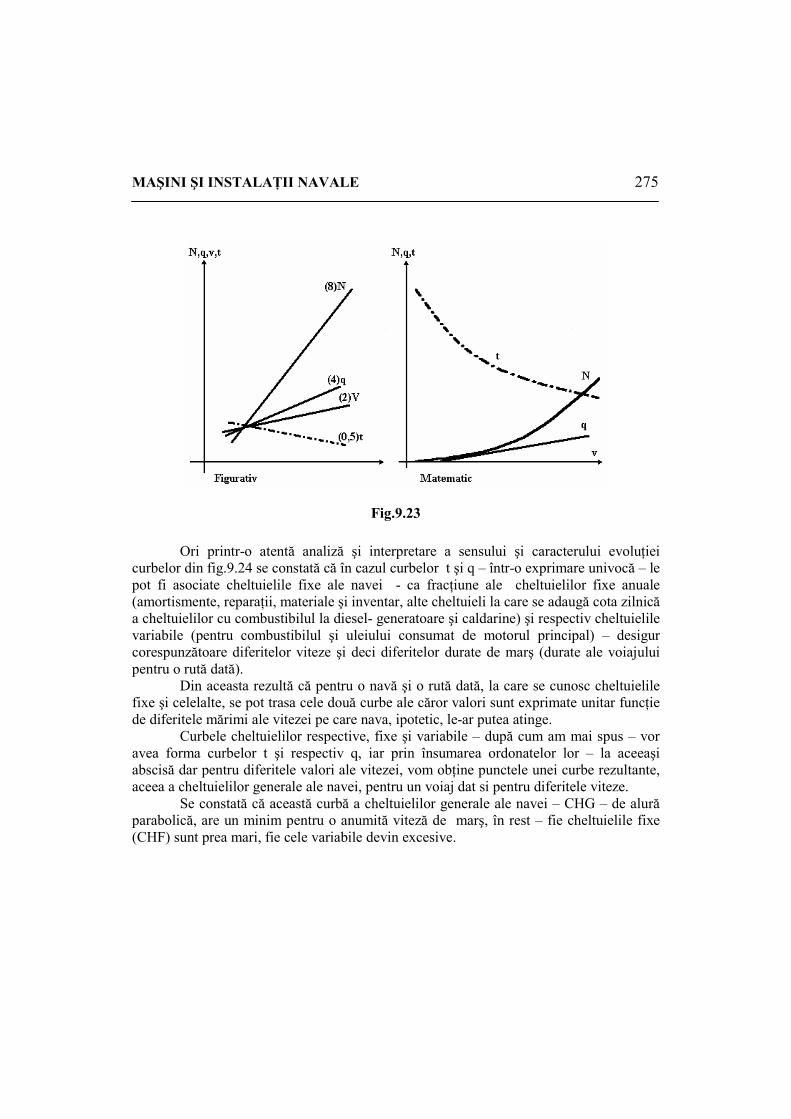
MAŞINI ŞI INSTALAŢII NAVALE 275
Fig.9.23
Ori printr-o atentă analiză şi interpretare a sensului şi caracterului evoluţiei curbelor din fig.9.24 se constată că în cazul curbelor t şi q – într-o exprimare univocă – le pot fi asociate cheltuielile fixe ale navei - ca fracţiune ale cheltuielilor fixe anuale (amortismente, reparaţii, materiale şi inventar, alte cheltuieli la care se adaugă cota zilnicăa cheltuielilor cu combustibilul la diesel- generatoare şi caldarine) şi respectiv cheltuielile variabile (pentru combustibilul şi uleiului consumat de motorul principal) – desigur corespunzătoare diferitelor viteze şi deci diferitelor durate de marş (durate ale voiajului pentru o rută dată). Din aceasta rezultă că pentru o navă şi o rută dată, la care se cunosc cheltuielile fixe şi celelalte, se pot trasa cele două curbe ale căror valori sunt exprimate unitar funcţie de diferitele mărimi ale vitezei pe care nava, ipotetic, le-ar putea atinge. Curbele cheltuielilor respective, fixe şi variabile – după cum am mai spus – vor avea forma curbelor t şi respectiv q, iar prin însumarea ordonatelor lor – la aceeaşiabscisă dar pentru diferitele valori ale vitezei, vom obţine punctele unei curbe rezultante, aceea a cheltuielilor generale ale navei, pentru un voiaj dat si pentru diferitele viteze. Se constată că această curbă a cheltuielilor generale ale navei – CHG – de alurăparabolică, are un minim pentru o anumită viteză de marş, în rest – fie cheltuielile fixe (CHF) sunt prea mari, fie cele variabile devin excesive.
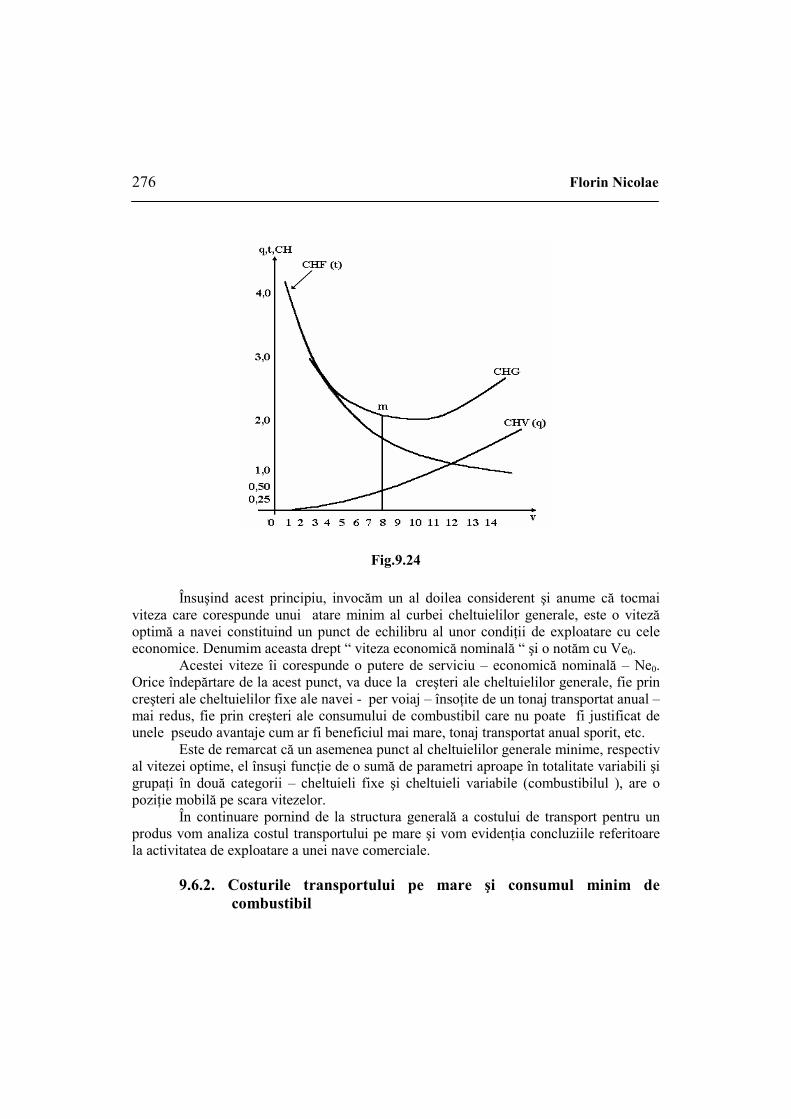
276 Florin Nicolae
Fig.9.24
Însuşind acest principiu, invocăm un al doilea considerent şi anume că tocmai viteza care corespunde unui atare minim al curbei cheltuielilor generale, este o vitezăoptimă a navei constituind un punct de echilibru al unor condiţii de exploatare cu cele economice. Denumim aceasta drept “ viteza economică nominală “ şi o notăm cu Ve0.
Acestei viteze îi corespunde o putere de serviciu – economică nominală – Ne0.Orice îndepărtare de la acest punct, va duce la creşteri ale cheltuielilor generale, fie prin creşteri ale cheltuielilor fixe ale navei - per voiaj – însoţite de un tonaj transportat anual – mai redus, fie prin creşteri ale consumului de combustibil care nu poate fi justificat de unele pseudo avantaje cum ar fi beneficiul mai mare, tonaj transportat anual sporit, etc.
Este de remarcat că un asemenea punct al cheltuielilor generale minime, respectiv al vitezei optime, el însuşi funcţie de o sumă de parametri aproape în totalitate variabili şigrupaţi în două categorii – cheltuieli fixe şi cheltuieli variabile (combustibilul ), are o poziţie mobilă pe scara vitezelor.
În continuare pornind de la structura generală a costului de transport pentru un produs vom analiza costul transportului pe mare şi vom evidenţia concluziile referitoare la activitatea de exploatare a unei nave comerciale.
9.6.2. Costurile transportului pe mare şi consumul minim de combustibil
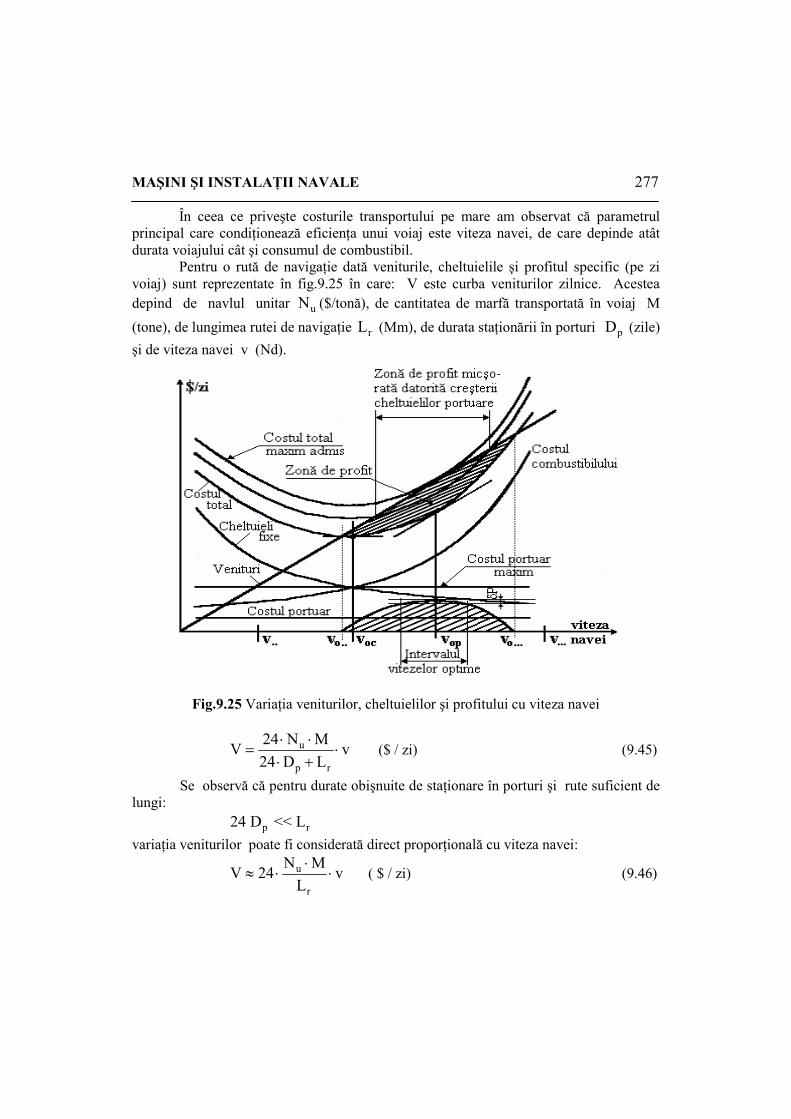
MAŞINI ŞI INSTALAŢII NAVALE 277
În ceea ce priveşte costurile transportului pe mare am observat că parametrul principal care condiţionează eficienţa unui voiaj este viteza navei, de care depinde atât durata voiajului cât şi consumul de combustibil.
Pentru o rută de navigaţie dată veniturile, cheltuielile şi profitul specific (pe zi voiaj) sunt reprezentate în fig.9.25 în care: V este curba veniturilor zilnice. Acestea depind de navlul unitar uN ($/tonă), de cantitatea de marfă transportată în voiaj M (tone), de lungimea rutei de navigaţie rL (Mm), de durata staţionării în porturi pD (zile) şi de viteza navei v (Nd).
Fig.9.25 Variaţia veniturilor, cheltuielilor şi profitului cu viteza navei
u
p r
24 N MV v24 D L
⋅ ⋅= ⋅
⋅ +($ / zi) (9.45)
Se observă că pentru durate obişnuite de staţionare în porturi şi rute suficient de lungi: p r24 D << L variaţia veniturilor poate fi considerată direct proporţională cu viteza navei:
u
r
N MV 24 vL⋅
≈ ⋅ ⋅ ( $ / zi) (9.46)

278 Florin Nicolae
Consumul de combustibil zilnic, cC , este suma consumurilor zilnice ale agregatelor din compartimentul de maşini (CM) şi ale motorului principal acesta având ponderea cea mai mare. Formula de calcul a cheltuielilor zilnice cu combustibilul este: 3 3 3
c aux aux l mpC C S 10 0.32 10 c R v S 10− − −= ⋅ ⋅ + ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ (9.47) unde:
auxC - consumul zilnic de combustibil al agregatelor din CM (Kg/zi);
auxS - costul combustibilului utilizat la agregatele din CM, de regulă motorină($/ tonă);
lc - consumul specific de combustibil al motorului principal (g / CP-h); 2R= (v) f(v ) ξ - este rezistenţa la înaintare a navei care depinde practic de
pătratul vitezei navei; mpS - costul combustibilului utilizat pentru motorul principal, de regulă
combustibil greu ($/tonă). Costurile combustibililor variază funcţie de tipul acestuia precum şi de portul de
ambarcare. Cheltuielile zilnice de exploatare, zC , care includ amortismentul, asigurările,
cheltuielile cu echipajul, cheltuielile de întreţinere şi reparaţii, etc. Considerând constante costurile de exploatare anuale anC costurile zilnice de exploatare vor fi:
an p an rz
C D C L 1C365 8760 v⋅ ⋅
= + ⋅ ($ /zi) (9.48)
Se observă că, pentru costurile zilnice de exploatare acestea sunt invers proporţionale cu viteza navei. Costurilor zilnice de staţionare în porturile atinse de navă, pC , nu depind de viteza navei ci numai de caracteristicile navei, de cantitatea de marfă operată în porturile respective precum şi de serviciile solicitate de navă în porturi. p sni pi smi serviC TB c D M c C= ⋅ ⋅ + ⋅ +∑ ∑ ∑ (9.49) unde:
TB - tonajul brut al navei ( tone registru); piD - este durata de staţionare în port în situaţia i ( staţionare în bazin, la cheu,
etc.); sniC - reprezintă tariful pentru situaţia i de staţionare a navei în port;
smiC - reprezintă tariful i de operare a mărfii (manipulare la dană, manipulare în port, depozitare, etc.);
serviC - reprezintă costul serviciului i solicitat de navă în port.

MAŞINI ŞI INSTALAŢII NAVALE 279
În costul serviciilor portuare au fost incluse şi costurile care nu depind de durata staţionării navei în port sau de cantitatea de marfă operată, cum ar fi tariful de intrare/ieşire, pilotajul, remorcajul, etc. Formula anterioară este valabilă atunci când tarifele portuare se percep în funcţie de tonajul brut al navei şi când există tarife distincte pentru marfă, situaţie întâlnită în majoritatea porturilor, inclusiv a celor vest-europene. Există însă destule porturi , printre care şi Constanţa în care calculul taxelor şi tarifelor portuare se face în mod diferit, de aceea trebuie cunoscut modul de calcul pentru fiecare port în parte, calculul cheltuielilor portuare efectuându-se conform regulilor de tarifare existente în portul respectiv. Cheltuielile totale ale navei se vor determina ca sumă a cheltuielilor parţiale : t c z pC C C C= + + (9.50)
Din fig.9.25 se observă că alura curbei cheltuielilor totale asigură existenţa unui minim al acestora corespunzător vitezei ocv a navei.
Profitul zilnic ($/zi): tP V C= − (9.51)
are un maxim la viteza opv .
Se observă că op ocv v≠ , diferenţa fiind cu atât mai mare cu cât veniturile specifice sunt mai mari.
Din prezentarea succintă a elementelor ce condiţionează eficienţa unui voiaj rezultă că aprecierea simultană a condiţiilor tehnice şi economice de realizare a voiajului în condiţiile în care factorii de influenţă sunt cunoscuţi ( navlul , cantitatea de marfă,cheltuielile portuare etc .) permite determinarea vitezei optime a navei; de asemenea se observă că aceşti factori influenţează la rândul lor viteza optimă a navei şi rezultatele financiare ale voiajului.
Observaţii : 1. Viteza navei nu poate scădea sub anumite limite impuse de condiţiile de exploatare ale navei; astfel viteza maximă nu poate depăşi viteza maximă de exploatare a navei, maxv , iar minv se alege ca:
( )min contr sigv max v , v= (9.52) unde:
contrv - viteza minimă necesară realizării în termen a contractului de trnsport;
sigv - viteza minimă necesară navigaţiei în siguranţă; aceasta depinde de condiţiile de navigaţie pe ruta de transport respectivă, de caracteristicile navei, dar de regulă , nu poate fi mai mică de 5-6 Nd, viteză care asigură condiţiile de guvernare, manevrabilitate şi stabilitate de drum.

280 Florin Nicolae
2. Viteza navei nu poate depăşi viteza maximă de exploatare ce poate fi atinsădin punct de vedere tehnic şi care este condiţionată de puterea maximă de exploatare a motorului principal al navei: max maxexpl
v v= (9.53)
Analiza parametrilor voiajului se realizează între aceste două viteze, indiferent de criteriile alese pentru optimizare. 3. Obiectivele care se pot lua în consideraţie pentru determinarea parametrilor voiajului sunt:
a) realizarea de profituri specifice maxime, ceea ce înseamnă navigaţia cu viteza obv ;
b) realizarea unor cheltuieli specifice minime pentru care se va naviga cu viteza ocv ;
c) cheltuieli specifice de combustibil minime (respectiv minimizarea consumului de combustibil ) realizate în cazul navigaţie cu viteza minv ;
d) venituri zilnice maxime, realizate la navigaţia cu viteza maxv .Deoarece este posibil ca pentru minv şi maxv cheltuielile să depăşească veniturile
B<0 ceea ce nu este fezabil din punct de vedere economic, pentru ultimele două criterii, viteza de exploatare se determină astfel:
min min 0min
max max 0max
v max(v , v );v min(v , v )
=
=(9.54)
Evident criteriul principal este reprezentat de obţinerea unor profituri maxime. 4. Întrucât în cursul navigaţiei nu se poate realiza o viteză constantă, obv , aceasta trebuie să corespundă cu viteza medie de navigaţie pe întreg voiajul navei, respectiv:
rop m
n
Lv v24 D
= =⋅
(Nd) (9.55)
în care nD este numărul de zile necesare efectuării voiajului. Viteza medie calculată în acest mod este numai o măsură relativă a vitezei reale a navei, deoarece ea poate fi realizată prin abateri mari de la viteza medie optimă, abateri care ar putea să scoată viteza reală din intervalul 0 minv , 0 maxv ; de aceea pentru a limita aceste abateri şi pentru a realiza o marjă de siguranţă acceptabilă pentru profitul obţinut, se va accepta o oarecare scădere a profitului (de ex. de 5-10%) ceea ce permite stabilirea unui interval de variaţie a vitezei în cursul voiajului, care cu rare excepţii legate de condiţii hidrometeorologice foarte defavorabile, poate fi menţinut pe întreg parcursul navigaţiei. 5. Viteza este considerată în raport cu apa (funcţie de care se determină rezistenţala înaintare) deci fără să se ţină cont de condiţiile hidrometeorologice; conducerea navei poate utiliza curenţii şi vânturile favorabile asigurând creşterea vitezei reale ceea ce
MAŞINI ŞI INSTALAŢII NAVALE 281
conduce la realizarea de venituri zilnice suplimentare în cadrul aceloraşi cheltuieli deci o creştere a profitului ce va fi realizat în voiajul respectiv. 6. Determinarea rezistenţei la înaintare este o problemă destul de dificilă dacă se are în vedere faptul că una din componentele sale, rezistenţa de frecare, variază cu pescajul navei (care determina suprafaţa udată a carenei ), cu durata de serviciu consumată a navei şi cu intervalul de timp scurs de la ultima andocare. În condiţiile reale de exploatare a navei se recomandă determinarea consumului de combustibil pentru câteva viteze ale navei (cel puţin trei) şi trasarea curbelor de variaţie a consumului de combustibil cu viteza navei. Întrucât după 6-7 ani de exploatare influenţa rugozităţii rămâne constantă, este suficientă stabilirea a trei curbe:
- imediat după andocare; - la mijlocul intervalului; - în preajma andocării. Acestea pot fi ulterior folosite cu bună aproximaţie, eventual prin interpolare,
pentru toate situaţiile în care se va afla nava în raport cu data andocării. 7. Deşi aparent timpul total de staţionare în port nu influenţează
viteza navei, totuşi la o analiză mai atentă se constată că această influenţă poate fi importantă mergând până la scoaterea voiajului respectiv din zona de profit, indiferent de viteza cu care s-ar realiza acesta. Astfel din fig.9.25 se constată că o creştere a cheltuielilor portuare (care pentru o anumită cantitate şi structură de marfă depinde de timpul total de staţionare a navei în port) micşorează atât profitul ce poate fi obţinut cât şimarja de viteze în care acesta poate fi realizat. Creşterea cheltuielilor portuare peste o anumită valoare maximă pentru care profitul este zero (acesta fiind realizat la o vitezăteoretică strict determinată a navei, care în practică nu poate fi menţinută ) scoate nava din zona de profit, indiferent de viteza acesteia. Dacă, din contră, cheltuielile portuare se reduc în raport cu cele preconizate (de ex. prin operarea mai rapidă a navei şi evitarea staţionării inutile a acesteia în porturi) profitul creşte, la fel ca şi marja de viteze în care acesta poate fi realizat. Acesta este motivul principal pentru care armatorii preferăporturile cu performanţe ridicate în care navele staţionează foarte puţin timp. 8. Este evident că navlul are de asemenea o mare importanţă în aprecierea eficienţei unui voiaj şi în determinarea vitezei optime de navigaţie. Astfel, cu cât navlul este mai mare, eficienţa voiajului creşte, marja de viteze în care se obţine profitul creşte, viteza optimă se deplasează spre zona vitezelor mai mari ceea ce determină reducerea duratei voiajului, de aceea armatorii sunt îndreptăţiţi să solicite navluri mai mari pentru durate mai reduse ale voiajului navei, durate care asigură avantaje şi pentru beneficiarii serviciilor de transport maritim.