Embed Size (px)
Citation preview

Sistem Linear dan Kontrol Optimal
Version 2.1.1
12 Pebruari 2013
Subiono
*Ju
rusan Matem
atikaFM
IPA
- ITS, Suraba
ya
*MMatematika
Subiono — Email: [email protected]
Penerbit: SubionoJurusan MatematikaInstitut Teknologi Sepuluh NopemberSukolilo, SurabayaIndonesia

2
Copyright
c© 2013 The Author, Subiono.
*Ju
rusan Matem
atikaFM
IPA
- ITS, Suraba
ya
*MMatematika
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kata Pengantar
Alhamdulillahirabbilalamin, segala puji hanyalah milikmu ya Allah yang telah meberikan"kebebasan bertanggung jawab" kepada manusia untuk suatu kebaikan dalam melak-sanakan amanatnya di hamparan bumi yang dihuni manusia. Sholawat dan Salam kepadamuya Nabi Muhammad beserta para keluarganya dan para pengikutnya sampai nanti di hariakhir.
Buku ini disusun dengan maksud untuk membantu dan mempermudah mahasiswadalam mempelajari materi kuliah MATEMATIKA SISTEM. Selain dari pada itu jugadimaksudkan untuk menambah suatu wacana bagi para peminat lainnya baik pada disi-plin ilmu teknik, ekonomi atau kalangan industri dan perguruan tinggi.
Dalam buku ini diberikan beberapa konsep pengertian dari materi yang disajikan sete-lah itu diikuti dengan beberapa contoh untuk mempermudah pemahaman, selain itu jugadiberikan beberapa contoh aplikasi dan beberapa soal sebagai latihan.
Topik bahasan disajikan dengan penekanan pada "matematika" tetapi tidaklah men-jadikan para pemakai lain akan mengalami kesulitan dalam mempelajari buku ini, karenapeletakan penekanan aspek matematika dibuat dengan porsi yang seimbang. Sehingga parapeminat matematika tetap dapat menikmati dan menggunakan ilmunya terutama dalammatematika sistem, begitu juga untuk para pemakai yang lainnya diharapkan mendapattambahan wawasan untuk melihat matematika sebagai alat yang dibutuhkan terutamadalam kajian matematika sistem untuk menyelesaikan masalah-masalah praktis yang di-hadapinya.
Untuk memudahkan pembaca mengikuti alur dari setiap topik bahasan dalam bukuini, diasumsikan pembaca mempunyai bekal pengetahuan tentang "Persamaan Differen-sial" dan "Aljabar Linear" yang memadai.
Persiapan penulisan materi buku ini membutuhkan waktu yang agak lama, sejak penulis
i

ii
mengajarkan mata kuliah "Matematika Sistem" dijurusan Matematika FMIPA-ITS, Sura-baya sekitar tahun 1990. Beberapa materi disusun dari pengalaman mengajar tsb. Selainitu juga dari kumpulan materi yang penulis dapat saat mengikuti "Short Course and WorkShop on Mathematical Systems Theory" yang diselenggarakan dalam rangka kerjasamaJurusan Matematika FMIPA-ITS, Surabaya dengan Delft Universisty of Technology, theNetherlands dari tgl. 12 April 1991 sampai dengan tgl. 12 Agustus 1991. Short Course tsb.langsung diberikan oleh Prof. Dr. G.J. Olsder yang mana dia juga sebagai penulis buku"Mathematical Systems Theory" ([1]) dan penulis pakai sebagai rujukan utama dalampenulisan buku ini. Selain dari pada itu draft tulisan buku ini ditulis saat penulis megikutiprogram doktor di Delft University of Technology, the Netherlands mulai September 1995sampai Juli 2000.
Penulis pada kesempatan ini menyampaikan keaktifan pembaca dalam mengkaji bukuini untuk menyampaikan kritik dan saran guna perbaikan buku ini, sehingga pada versiyang mendatang "mutu buku" yang baik bisa dicapai. Kritik dan saran ini sangat pent-ing karena selain alasan yang telah disebutkan tadi, penulis percaya bahwa dalam sajianbuku ini masih kurang dari sempurnah bahkan mungkin ada suatu kesalahan dalam sajianbuku ini baik dalam bentuk redaksional, pengetikan dan materi yang menyebabkan men-jadi suatu bacaan kurang begitu bagus. Kritik dan saran yang konstruktif dapat langsungdisampaikan pada alamat email berikut: [email protected]
Buku ini dapat diperoleh secara gratis oleh siapapun tanpa harus membayar kepadapenulis. Hal ini berdasarkan pemikiran penulis untuk kebebasan seseorang mendapatkansuatu bacaan yang tersedia secara bebas dengan maksud "kemanfaatan" dan "kejuju-ran". Yang dimaksud dengan kemanfaatan adalah bergunanya bacaan ini untuk kemuda-han pembaca memperoleh informasi penting yang diperlukannya dan untuk pembelajaran.Sedangkan kejujuran adalah ikatan moral dari pembaca untuk tidak memdistribusi bukuini dengan tujuaan yang tidak bermanfaat dan pengakuan secara pribadi (kepemilikan).
Penulis menulis buku ini berdasarkan pemikiran "kebebasan menulis" (tidak harusmenggunakan media cetak penerbit) dengan asas "kemanfaatan" menggunakan media yangtersaji masa kini. Beberapa alat bantu untuk penulisan buku ini juga didapat secara gratis,yaitu perangkat lunak LATEX dan TEXMAKER sebagai salah satu media LATEX editor. Be-berapa gambar yang ada dalam buku ini menggunakan perangkat lunak LaTexDraw yangjuga didapat secara gratis. Begitu juga beberapa bahan rujukan didapat secara gratislewat internet. Selain itu untuk menyelesaikan beberapa contoh yang dibahas digunakanalat bantu perangkat lunak Maxima versi 5.3.2 dan Maxima-5.24.0, kedua perangkat lunakini juga didapat dari internet secara gratis.
Akhirnya, dengan segala kerendahan hati penulis memohon kepada Allah semoga pe-nulisan ini bisa berlanjut untuk versi mendatang yang tentunya lebih "baik" dari Versi1 yang tersedia saat ini dan semoga benar-benar buku yang tersaji ini bermanfaat bagi
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

c©Subiono, Jurusan Matematika-ITS : Aljabar Linear iii
pembaca.
Catatan Untuk Versi 1.1 Versi ini merupakan versi revesi dari beberapa kesalahan ketik,gambar dan penulisan formula matematika yang terdapat dalam versi sebelumnya. Jugadiberikan suatu tambahan yaitu suatu cara atau algorithma untuk memperoleh matrikseksponensial eAt. Bagi pembaca yang ingin mendapatkan cara menghitung matriks ekspo-nensial eAt ini bisa memperolehnya dalam [6].
Catatan Untuk Versi 1.2 Versi 1.2 merupakan kelanjutan dari versi 1.1 dengan beberapatambahan yang melengkapi Bab 4. Penambahan pada Bab 4 khususnya mengenai penger-tian kestabilan sistem dan kriteria kestabilan sistem menurut Routh-Hurwitz diberikansecara agak lengkap. Materi ini merupakan hasil penulis ketika membimbing tugas akhirS1 di Jurusan Matematika FMIPA-ITS. Pembahasan yang lebih lengkap dan rinci menge-nai kestabilan dengan kriteria Routh-Hurwitz bisa didapat dalam [7].
Catatan Untuk Versi 2.0 Dalam Versi 2.0 ini ada beberapa tambahan meteri yang lebihlengkap terutama materi yang berkaitan dengan pengertian keterkontrolan, keteramatandan penstabilan sistem dalam Bab 4 dan Bab 5 . Selain itu materi realisasi minimal darisuatu sistem linear invarian waktu juga diberikan lebih lengkap dalam Bab 6. Tambahanmateri tsb. diambil dari tugas akhir S1 Jurusan Matematika FMIPA-ITS hasil bimbinganpenulis yang bisa didapat dalam [8] dan [9].Catatan Untuk Versi 2.0.1 Dalam Versi 2.0.1 ini diberikan algorithma penghitungan ma-triks transisi eAt yang lebih lengkap dan mudah dibandingkan dengan yang telah diberikansebelumnya.Catatan Untuk Versi 2.1.1 Dalam Versi 2.1.1 ini ada beberapa tambahan bab yang berisimateri kontrol optimal. Oleh kerana itu judul buku juga diubah sesuai isi dari materi bukuyaitu menjadi "Sistem Linear dan Kontrol Optimal".
Surabaya, 12 Pebruari 2013
b
Juru
san Matematika
*F
MIP
A
-ITS, Surab
aya
*MMatematika
Penulis
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

iv
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Daftar Isi
Kata Pengantar i
1 Pendahuluan 1
1.1 Pengertian Sistem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Sejarah ringkas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Uraian ringkas isi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2 Prinsip-prinsip pemodelan 9
2.1 Hukum-hukum konservasi . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Prinsip-prinsip Phenomenalogi . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3 Hukum-hukum prinsip fisika . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.1 Termodinamika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.2 Mekanika . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.3.3 Elektromagnit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.4 Contoh-contoh . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4.1 Pendulum terbalik . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.4.2 Dinamika satelit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4.3 Batang dipanasi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4.4 Rangkaian Elektrik . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.5 Dinamika populasi . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4.6 Ketergantungan umur dinamika populasi . . . . . . . . . . . . . . . 21
2.4.7 Bioreaktor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.4.8 Transport polusi . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.4.9 Sistem Biomedikal . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.4.10 Suatu sistem Ketinggian Zat Cair . . . . . . . . . . . . . . . . . . . 26
v

vi DAFTAR ISI
2.4.11 Sistem dua kereta glinding . . . . . . . . . . . . . . . . . . . . . . . 29
2.4.12 Ekonomi nasional . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3 Sistem differensial linier 33
3.1 Uraian dalam dan uraian luar suatu sistem . . . . . . . . . . . . . . . . . . 33
3.2 Pelinearan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3 Penyelesaian persamaan differensial linier . . . . . . . . . . . . . . . . . . . 45
3.4 Respon impuls dan step . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
4 Sifat-sifat sistem 81
4.1 Kestabilan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.1.1 Kestabilan dari segi nilai karakteristik . . . . . . . . . . . . . . . . 81
4.1.2 Kriteria Routh-Hurwitz . . . . . . . . . . . . . . . . . . . . . . . . 85
4.1.3 Kestabilan Lyapunov . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.1.4 Kestabilan masukan-keluaran . . . . . . . . . . . . . . . . . . . . . 91
4.2 Keterkontrolan dan keteramatan . . . . . . . . . . . . . . . . . . . . . . . . 92
4.2.1 Ruang-bagian "keadaan" ditinjau dari masukan dan keluaran . . . 93
4.2.2 Munculnya sistem takterkontrol atau sistem tak teramati . . . . . . 95
4.2.3 Keterkontrolan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 97
4.2.4 Keteramatan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
4.2.5 Ruang-bagian terkontrol dan teramati . . . . . . . . . . . . . . . . 104
4.3 Dualitas keterkontrolan dan keteramatan . . . . . . . . . . . . . . . . . . . 108
4.4 Bentuk kompanion terkontrol dan teramati . . . . . . . . . . . . . . . . . . 109
5 Umpan balik keadaan dan keluaran 117
5.1 Umpan balik dan terstabilkan . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.2 Pengamat dan prinsip pemisahan . . . . . . . . . . . . . . . . . . . . . . . 124
5.3 Penolakan gangguan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
6 Penyajian masukan/keluaran 133
6.1 Transformasi Laplace dan kegunaannya . . . . . . . . . . . . . . . . . . . . 133
6.1.1 Hubungan sistem-sistem . . . . . . . . . . . . . . . . . . . . . . . . 136
6.1.2 Ossilasi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
6.1.3 Fungsi rasional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
6.2 Fungsi transfer dan matriks transfer . . . . . . . . . . . . . . . . . . . . . . 140
6.3 Realisasi minimal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 150
6.4 Metoda Frekuensi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

DAFTAR ISI vii
7 Kontrol Optimal 159
7.1 Sejarah ringkas kontrol otomatik . . . . . . . . . . . . . . . . . . . . . . . 1597.2 Beberapa masalah kontrol optimal . . . . . . . . . . . . . . . . . . . . . . . 174
8 Formulasi masalah kontrol optimal 177
8.1 Masalah maksimum/minimum dari suatu integral . . . . . . . . . . . . . . 1808.1.1 Persamaan Euler-Langrange . . . . . . . . . . . . . . . . . . . . . . 180
8.2 Cara Hamiltonian . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1828.3 Persamaan Hamilton-Jacobi . . . . . . . . . . . . . . . . . . . . . . . . . . 1918.4 Masalah optimal kontrol dengan syarat keadaan akhir bebas . . . . . . . . 195
9 Linier Quadratic Regulator (LQR) 197
9.1 Matriks semi-definit positip dan definit positip . . . . . . . . . . . . . . . . 1989.2 Kontrol loop buka . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1999.3 Kontrol loop-tutup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2059.4 Keadaan-steadi dan kontrol suboptimal . . . . . . . . . . . . . . . . . . . . 2129.5 Disain Kontrol minimum waktu dan masukan-dibatasi . . . . . . . . . . . . 2269.6 Linier Regulator dengan menentukan derajad kestabilan . . . . . . . . . . 2349.7 Masalah regulator output . . . . . . . . . . . . . . . . . . . . . . . . . . . 2379.8 Suboptimal linier regulator . . . . . . . . . . . . . . . . . . . . . . . . . . . 2389.9 Pengakomodasian gangguan luar . . . . . . . . . . . . . . . . . . . . . . . 241
Indeks 245
Daftar Pustaka 245
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bab 1Pendahuluan
1.1 Pengertian Sistem
Dalam bagian ini diberikan suatu pengertian dari suatu sistem secara umum, dari penger-tian ini diharapkan memberi suatu gambaran apa sistem itu dalam konteks pengertianyang diberikan sebagaimana berikut ini. Selanjutnya diberikan beberapa contoh untukmenjelaskan pengertian ini. Gambar 1.1 memberikan alur pengertian suatu sistem.
sistem
sekitar
realita
sistemmasukan keluaran
Gambar 1.1: Pengertian Sistem.
Secara langsung bisa dikatakan bahwa sistem adalah bagian dari realita. Realita diluarsistem dinamakan "sekitar sistem". Interaksi diantara sistem dan sekitar sistem direal-isasikan lewat besaran, sangat sering merupakan fungsi dari waktu yang dinamakan ma-sukan (input) dan keluaran (output). Sistem dipengaruhi sekitar melaui masukan dansistem mempunyai pengaruh pada sekitar melalui keluaran. Masukan dan keluaran sistemyang disajikan oleh signal atau fungsi dari waktu bisa merupakan waktu yang kontinuatau diskrit. Hal ini berkaitan dengan apa yang dinamakan sistem kontinu dan sistemdiskrit. Mengkaji (menganalisis) proses fisis atau mendisainnya dinamakan sistem fisisdalam hal ini hubungan masukan dan keluran sistem disajikan oleh suatu model matem-atika. Sangat sering model matematika ini berbentuk suatu persamaan differensial (untukyang kontinu) dan persamaan beda (untuk yang diskrit). Untuk sistem dengan masukandan keluarannya yang disajikan oleh bentuk persamaan differensial biasa dinamakansistem tergumpal (lumped), bila tidak demikian dinamakan sistem terdistribusi.
1

2 Pendahuluan..
Pembentukan suatu model matematika sering membutuhkan asumsi tentang sifat dasarproses fisisContoh-contoh:
• Dalam perekonomian: Laju permintaan (masukan) mempunyai pengaruh padakeluaran dalam hal ini adalah perilaku infestasi.
• Mobil: Putaran kemudi suatu mobil (masukan) mempunyai pengaruh pada arahdua roda depan mobil (keluaran).
• Temperatur ruangan (masukan) pengetesan tanaman mempunyai pengaruh padapertumbuhan tanaman (keluaran).
• Air hujan (masukan) memberikan pengaruh pada ketinggian permukaan dari suatusungai (keluaran).
Diberbagai bidang kajian, suatu phenomena tidak dikaji secara langsung melainkan lewatsuatu model dari phenomena. Suatu model adalah suatu penyajian yang sering dalamistilah matematika penyajian tsb. dirasa penting untuk waktu mendatang bagi kajianobyek atau sistem. Dengan memanipulasi penyajian tsb. diharapkan pengetahuan barutentang phenomena yang telah dimodelkan tadi bisa diperoleh tanpa bahaya, biaya atauketidak nyamanan dalam pemanipulasian phenomena real itu sendiri. Dalam matematikasistem pembahasan hanya bekerja dengan model dan saat berbicara suatu sistem diartikansuatu versi model dari sistem sebagai bagian dari realita.
Kebanyakan pemodelan menggunakan matematika sebagai alatnya. Keadaan men-datang yang penting dari berbagai phenomena fisika secara numerik bisa diuraikan sertahubungan diantara keadaan mendatang tsb. diuraikan oleh persamaan atau pertidak-samaan. Secara khusus misalnya dalam pengetahuan alam dan rekayasa, sifat-sifat massa,percepatan dan gaya bisa diuraikan oleh persamaan matematika. Bagaimanapun demisuksesnya pemanfaatan pendekatan pemodelan diperlukan suatu pengetahuan phenomenayang dimodelkan serta sifat-sifat rekayasa pemodelan. Perkembangan komputer berke-cepatan tinggi secara besar meningkatkan penggunaan dan pemanfaatan pemodelan. Den-gan penyajian suatu sistem sebagai suatu model matematika mengubah model yang adakedalam instruksi dari suatu komputer dan mengoperasikannya. Dalam hal ini adalahsangat memungkin untuk memodelkan sistem yang lebih besar dan kompleks dari yangsebelumnya.
Penekanan dari makna sistem yang dikaji adalah perilaku dinamik dari phenomena,yaitu bagaimana karakteristik keadaan mendatang (seperti masukan dan keluaran) berubahsesuai dengan berubahnya waktu dan apa hubungannya yang juga sebagai fungsi dariwaktu. Satu gambaran dari hal tsb. adalah bila mencoba untuk mendisain sistem kontrolsedemikian hingga suatu perilaku yang diharapkan bisa dicapai.
Matematika sistem membentuk dasar matematika bagi area rekayasa, seperti kontrolotomatik dan jejaring (networks). Ia juga awal untuk subyek matematika yang lain yaitu
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pengertian Sistem.. 3
teori kontrol optimal dan teori filter. Dalam teori kontrol optimal adalah mencoba menda-pakan suatu fungsi masukan yang menghasilkan fungsi keluaran sekaligus sedapat mungkinmemenuhi suatu persyaratan tertentu. Sedangkan teori filter, interpretasi dari fungsi ma-sukan diamati dengan kesalahan pengukuran, dalam hal ini sistem mencoba untuk mere-alisasi suatu keluaran yang sama dengan pengamatan ideal, yaitu tanpa kesalahan pen-gukuran. Matematika sistem juga memainkan suatu peranan dalam ekonomi (khususnyateori kontrol ekonomi makro dan analisa time series), teori ilmu komputer (teori automata,Petri-nets) dan ilmu manajemen (model dari perusahaan dan organisasi yang lain).
utara
u
α
αe e
αe +-
autopilot kapal
gangguan
αue
Gambar 1.2: Auto pilot.
Contoh 1 [Autopilot kapal] Suatu autopilot yang diagramnya disajikan dalam Gambar1.2 adalah suatu perangkat, sebagai masukan adalah sudut kesalahan arah e yang ter-jadi akibat beda diantara sudut arah yang diingini αe dengan kenyataan sudut arah kapalsaat ini α (misalnya diukur dengan suatu instrumen kompas magnetik atau gyrocompass).Sudut arah kapal yang diinginkan αe adalah sudut acuan bagi navigator. Dengan menggu-nakan informasi tsb. perangkat secara otomatis memposisi kemudi fungsi waktu u sebagaimasukan sedemikian hingga kesalahan arah yang terjadi e = αe − α sekecil mungkin .Diberikan kedinamikan boat dan gangguan luar (angin, gelombang besar dsb.) teori kon-trol otomatik membantu untuk menentukan masukan kontrol u = f(e) yang sesuai denganmaksud khusus yaitu untuk tujuan kestabilan, keakuratan, waktu respon, dsb. Misal-nya, untuk hal ini suatu pengontrol yang mungkin adalah suatu bang-bang kontrol yangdiberikan oleh:
u =
{
+umax bila e > 0,−umax bila e < 0.
Pengontrol u mungkin adalah bentuk proporsional:
u = K.e
dimana K suatu konstanta. Dalam hal ini diasumsikan −umax ≤ K.e ≤ +umax untuksemua nilai u yang diingini. Bila u bukan seperti hal diatas, beberapa jenis saturasi harusdiperkenalkan. Hukum kontrol juga mungkin terdiri dari suatu bagian proporsional, bagianintegral dan bagian differensial:
u = K.e+K ′∫ t
0
e(s)ds+K ′′de
dt, (1.1)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

4 Pendahuluan..
dimana K,K ′ dan K ′′ adalah konstanta. Hukum kontrol ini biasa ditulis PID, dimana Pbagian proporsional, I bagian integral dan D bagian differensial.
Teori kontrol otomatik membantu dalam pemilihan hukum kontrol yang terbaik. Bilakapal itu sendiri dipertimbangkan sebagai suatu sistem, maka sebagai masukan ke kapaladalah posisi kemudi u (dan mungkin juga gangguan) dan keluaran arah kapal adalah α.Auto pilot adalah sistem yang lain dengan masukan signal kesalahan e dan keluaran adalahposisi kemudi kapal. Terlihat bahwa suatu keluaran dari suatu sistem bisa merupakanmasukan bagi sistem lainnya. Kombinasi dari kapal, autopilot dan keterkaitan α dan αe
bisa juga sebagai suatu sistem dengan masukan sudut arah kapal yang diharapkan αe dankeluaran realita sudut arah kapal α (lihat Gambar 1.2).
�
Contoh 2 [Masalah kontrol optimal] Gerakan dari suatu kapal diberikan oleh:
x(t) = f(x, u, t),
dimana keadaan x = (x1, x2)T ∈ R
2 menyajikan posisi kapal terhadap suatu sistem kordinattetap. Vektor u = (u1, u2)
T ∈ R2 menyajikan kontrol dan t adalah waktu. Notasi x menya-takan turunan terhadap waktu dari dua komponen keadaan sedangkan notasi T menyatakantranspose. Masing-masing fariabel kontrol u1 dan u2 dipilih sebagai posisi kemudi dankecepatan kapal. Masalahnya sekarang adalah memilih u1 dan u2 sedemikian hingga bahanbakar yang digunakan kapal sekecil mungkin. Bila kapal meninggalkan Surabaya padasuatu waktu tertentu dan mencapai Makassar 4 hari kemudian. Fungsi pengontrol u1 danu2 mungkin bergantung pada informasi yang tersedia yaitu waktu, ramalan cuaca, badaidsb. Secara formal, u = (u1, u2)
T harus dipilih sedemikian hingga integral
ta∫
t0
g(x, u, t)dt
minimum. Kriteria integral diatas menguraikan banyaknya bahan bakar yang digunakan.Fungsi g adalah bahan bakar yang digunakan per satuan waktu, t0 waktu keberangkatandan ta waktu kedatangan.
�
Contoh 3 [Filtering] Sistem satelit NAVSAT merupakan singkatan dari NAVigation bymeans of SATellites. Sistem navigasi satelit ini mencakup seluruh dunia dikaji oleh agenruang angkasa masyarakat Eropah. Selama tahun 1980 sistem NAVSAT dalam tahappengembangan dengan kajian fisibelitas dikerjakan oleh berbagai institut penelitian ruangangkasa masyarakat Eropah. Misalnya pada National Aerospace Laboratory NLR, Ams-terdam, Belanda, suatu alat simulasi dikembangkan sebagai alternatif konsep NAVSATyang bervariasi dan skenario bisa dievaluasi.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Sejarah ringkas.. 5
Ide dasar satelit yang melandasi sistem navigasi adalah: Pengguna (misalnya suatupesawat atau suatu kapal) menerima pesan lebih dari satu satelit, penerima bisa menges-timasi posisi pesawat/kapalnya. Satelit menyiarkan kordinatnya (dalam beberapa frameacuan yang diketahuai) dan saat waktu dimana pesan tsb. disiarkan, penerima mencatatwaktu saat ia menerima pesan dengan jam yang ada. Sehingga penerima tahu perbe-daan waktu diantara pengiriman dan penerimaan pesan yang menghasilkan jarak diantaraposisi satelit dengan pesawat/kapal. Bila penerima bisa menghitung jarak tsb. sedikit-nya dari tiga satelit yang berbeda, maka secara prinsip penerima bisa menghitung posisipesawat/kapalnya. Faktor yang kompleks dalam perhitungan adalah:
i). satelit-satelit yang berbeda mengirim pesan pada saat waktu yang berbeda pada saatyang bersamaan pesawat/kapal bergerak,
ii). beberapa sumber kesalahan yang tersaji dalam data, misalnya keterlambatan iono-spheric dan tropospheric yang tak diketahui, jam diantara satelit dan penerima tidaksecara sinkron sama dan posisi satelit yang sedang disiarkan hanya dengan keaku-ratan yang terbatas.
Permasalahan yang harus diselesaikan oleh penerima adalah bagaimana menghitung posisipesawat/kapal seakurat mungkin ketika ia mendapatkan informasi dari satelit-satelit danbagaimana ia mengetahui karakteristik stokhastik dari kesalahan atau ketaktentuan yangdisebutkan diatas. Bila satelit-satelit menyiarkan informasi secara periodik, penerima jugabisa meng-update estimasi posisi pesawat/kapalnya secara periodik yang mana posisi inijuga merupakan fungsi dari waktu.
�
1.2 Sejarah ringkas
Umpan balik adalah konsep dari teori sistem bisa ditemui diberbagai tempat misalnya dialam dan dalam kehidupan organisme. Sebagai contoh kontrol dari temperatur badan. Be-gitu juga proses sosial dan ekonomi dikontrol oleh mekanisme umpan balik. Pada sebagianbesar perlengkapan teknik menggunakan mekanisme kontrol.
Pada masa lalu umpan balik sudah diterapkan misalnya dalam kincir air Babylonicuntuk pengontrolan tinggi air. Sejarawan Otto Mayr seorang tekniksi menguraikan untukpertama kalinya kegunaan dari suatu mekanika umpan balik yang didisain oleh CornelisDrebbel seorang kimiawan [1572-1633]. Ia mendisain “Athanor”, suatu pemanas yang manaia berharap dengan optimis mengubah timah menjadi emas. Kontrol temperatur pema-nasnya agak kompleks dan bisa dipandang sebagai suatu disain umpan balik.
Penemuan Drebbel digunakan untuk maksud komersial oleh menantunya, AugustusKuffler [1595-1677]. Pada saat yang lain Christian Huygens [1629-1695] salah seorangyang mendisain sendiri suatu roda penggilingan untuk pengontrolan kecepatan putar peng-giling. Ide ini diperhalus oleh R. Hooke [1635-1703] dan J. Watt [1736-1819]. Nama yang
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

6 Pendahuluan..
terakhir tsb. adalah penemu mesin uap. Pada pertengahan abab ke-19 mesin uap J. Watttelah menghabiskan lebih dari 75000 bola-putar yang dipasang pada pemutar di mesinuap tsb. Segera disadari bahwa bila pengontrol terlalu kaku yang dikenakan pada alattsb. akan memberikan suatu masalah. Saat kini disadari bahwa perilaku yang terjadimembentuk suatu ketidakstabilan yang disebabkan suatu gain tinggi dalam loop umpanbalik. Masalah perilaku buruk ini diselidiki oleh J.C. Maxwell [1831-1879] seorang yangpertama kali mengkaji analisa matematika masalah kestabilan. Papernya “On Governor”dapat dipandang sebagai artikel matematika pertama yang berkaitan dengan teori kontrol.
Perkembangan penting berikutnya dimulai pada periode sebelum perang dunia ke-2 diBell Labs, USA. Temuan amplifikasi elektronik yang menggunakan umpam balik dimulaipendisainan dan penggunaan pengontrol umpan balik dalam perangkat komunikasi. Dalamarea teoritik, teknik domain-frekuensi dikembangkan untuk penganalisaan kestabilan dankesensitifitasan. H. Nyquist [1889-1976] dan H.W. Bode [1905-1982] adalah dua orangternama dalam hal tsb.
Norber Wiener [1894-1964] bekerja pada kontrol pembakaran dan pertahanan anti-aircraft selama perang dunia ke-2. Ia juga penyokong teori kontrol dalam berbagai macamkecerdasan buatan sebagai ilmu yang lain yang dia namakan “Cybernetics” (kerja ini sudahdigunakan oleh A.M. Ampere [1775-1836]).
Teori matematika sistem dan teori kontrol akhir-khir ini dikenal, ditemui jejaknya padatahun 1950. Teori kontrol (klasik) memberikan suatu dorongan yang berarti. Awalnyateori matematika sistem kurang lebihnya suatu kumpulan konsep dan rekayasa dari per-samaan differensial, aljabar linier, teori matriks, teori probabilitas, statistik dan sedikitperlusan teori fungsi kompleks. Selanjutnya (sekitar 1960) teori sistem memperoleh wa-jahnya sendiri, hasil dari hal tsb. adalah terutama dalam ‘struktur’ dari ’kotak (box)’ yangberkaitan dengan masukan dan keluaran. Ada dua kontribusi pada pengembangan tsb.,pertama terdapat pengembangan fundamental teori di sekitar tahun 1950. Nama-namayang berhubungan dengan pengembangan tsb. adalah L.S. Pontryagin (kontrol optimal),R. Bellman (programing dinamik) dan R.E. Kalman (model ruang keadaan dan filter rekur-sif). Kedua terdapat temuan chip di akhir tahun 1960 disusul kemudian pengembanganelektronik-mikro. Hal ini menghasilkan suatu kemudahan dan kemajuan komputer berke-cepatan tinggi dengan demikian algorithma yang berkaitan dengan kotrol yang mempunyaikompleksitas derajat tinggi bisa diatasi.
1.3 Uraian ringkas isi
Pada bagian ini diberikan uraian ringkas dari materi yang disajikan dalam buku ini, pen-dahuluan diberikan dalam Bab 1, dimana didalam bagian 1.1 diberikan pengertian darisistem serta contoh-contohnya. Selanjutnya, pada bagian 1.2 diuraikan sejarah ringkasserta perkembangan dari sistem.
Prinsip-prinsip pemodelan diberikan dalam Bab 2 dimana didalamnya berisi beberapabagian tentang hukum-hukum: konservasi, phenomenalogi dan fisika, sedangkan contoh-
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Uraian ringkas isi.. 7
contohnya diberikan pada bagian berikutnya dalam bab yang sama.Dalam Bab 3 diuraikan sistem persamaan linier. Pada bab ini bagian 3.1 diberikan
pengertian uraian luar dari suatu sistem yang membicarakan hubungan langsung diantaramasukan dengan keluaran dan uraian dalam suatu sistem yang memberikan gambaran"keadaan" dalam sistem tsb. Kajian tentang pelinieran diberikan pada bagian 3.2. Bagian 3.3dan bagian 3.4 berturut-turut berisi tentang penyelesaian sistem persamaan differensial danrespon impuls - respon step dari suatu sistem.
Sifat-sifat sistem diberikan dalam Bab 4. Sifat sifat ini antara lain membicarakan kesta-bilan pada bagian 4.1, keterkontrolan pada bagian 4.2.3 dan keteramatan pada bagian 4.2.4.Tiga bagian terakhir dari Bab 4 yaitu bagian 4.2.5, bagian 4.3 dan bagian 4.4 berturut-turut membicarakan ruang bagian terkontrol dan teramati, dualitas keterkontrolan danketeramatan dan bentuk kompanion terkontrol dan teramati.
Bab 5 berisi tentang umpan balik keadaan dan keluaran yang terdiri dari bagian 5.1membahas umpan balik dan terstabilkan, bagian 5.2 mebahas pengamat dan prinsip pemisa-han sedangkan bagian 5.3 membahas penolakan gangguan.
Dalam bab terakhir, Bab 6 berisi tentang penyajian masukan/keluaran. Dalam bab inipada bagian 6.1 membahas transformasi Laplace dan kegunaannya, bagian 6.2 membahasfungsi transfer dan matriks transfer, bagian 6.3 membahas realisasi minimal dan bagian 6.4membahas metoda frekuensi.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

8 Pendahuluan..
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bab 2Prinsip-prinsip pemodelan
Pada bagian ini disajikan beberapa alat yang bisa digunakan dalam pemodelan phenomenadinamik. Bagian ini tidak memberikan suatu perlakuan mendalam terhadap alat-alat tsb.tetapi hanya sekedar sebagai suatu pengantar prinsip yang mendasar. Satu hal yang bisadiperdebatkan, bahwa prinsip pemodelan bukan merupakan domain dari teori matematikasistem. Dalam teori matematika sistem ini biasanya dimulai dengan suatu model yangdiberikan, mungkin dibuat oleh seorang ahlinya pada bidang terapan yang terkait.
2.1 Hukum-hukum konservasi
Salah satu prinsip-prinsip pemodelan yang paling fundamental adalah pengertian dari kon-servasi. Hukum-hukum diturunkan dari pengertian ini mengikuti alasan alamia dan bisaditerapkan dimana saja.
Misalnya, ketika memodelkan phenomena fisika, sering menggunakan (bahkan tanpaalasan lagi) konservasi zat/bahan, konservasi muatan listrik, konservasi energi dll. Tapijuga dalam suatu disiplin ilmu yang tidak begitu banyak berorientasi secara matematikaprinsip-prinsip konservasi digunakan. Misalnya dalam menguraikan evolusi dari suatu pop-ulasi, dalam hal ini bisa diasumsikan bahwa ada konservasi dari individu-individu, sebabsecara sederhana tidak ada individu bisa tercipta atau tidak ada tampa alasan. Dengancara serupa, dalam ekonomi harus selalu ada konservasi dari asset dalam makna yangserupa atau yang lainnya.
Jadi, hukum-hukum konservasi bisa dilihat sebagai hukum-hukum yang berdasar padaalasan dan hitungan.
9

10 Prinsip-prinsip pemodelan..
2.2 Prinsip-prinsip Phenomenalogi
Disamping hukum-hukum konservasi yang telah didiskusi diatas sering juga apa yang dina-makan hukum-hukum phenomenalogi digunakan. Hukum-hukum ini diperoleh dalam suatucara empirik dan sangat banyak bergantung pada phenomena alam yang harus dimodelkan.Satu contoh dari hukum tsb. adalah hukum Ohm V = RI yang berkaitan dengan voltage Vatas suatu resistor bernilai R dengan arus I yang melewati resistor. Hukum Ohm pentingdalam pemodelan rangkaian elektrik. Bagaimanapun, hukum-hukum serupa terjadi dalamdisiplin yang lainnya, seperti hukum Forier pada konduksi panas dan hukum Fick pada di-fusi cahaya. Tidaklah dengan suatu alasan hukum-hukum seperti hukum Ohm diturunkan,tetapi hukum-hukum tsb. merupakan hasil dari suatu eksperimen. Tidak ada alasan men-gapa voltage, arus dan resistor berelasi seperti yang dilakukan Ohm. Meskipun demikian,hal tsb. merupakan bagian dari realita fisika oleh sebab itu bisa digunakan dalam pemo-delan phenomena dinamik. Banyak lagi hukum-hukum phenomenalogi lainnya, beberapadiantaranya didiskusikan pada bagian berikutnya.
2.3 Hukum-hukum prinsip fisika
Dalam bagian ini secara ringkas didiskusikan hukum-hukum prinsip yang paling pentingyang memenuhi realita fisika.
2.3.1 Termodinamika
Bila memodelkan suatu phenomena termodinamik bisa dipakai tiga prinsip hukum yangsangat fundamental.
1. Konservasi energi
2. Irreversibiliti perilaku suatu sistem makroskopik
3. Temperatur nol mutlak tidak bisa dicapai.
Hukum ke-2 sering juga dikatakan sebagai entropi dari suatu sistem tidak dapat menurun.Entropi adalah suatu ukuran untuk keadaan tak teratur dalam suatu sistem.
Catatan bahwa hukum ke-2 berdasarkan pada alasan. Bila hukum tidak dipenuhi, makabeberapa bentuk energi akan hilang dan hukum tidak bisa dibuat untuk memenuhi halkehilangan energi ini. Hukum ke-2 dan ke-3 berdasarkan pada eksperimen dan menguraikansifat-sifat phenomenalogi.
2.3.2 Mekanika
Bila memodelkan suatu phenomena mekanika tanpa disadari , ini sering menggunakannyabeberapa prinsip hukum-hukum yang sangat penting. Salah satu diantara prinsip tsb.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Hukum-hukum prinsip fisika.. 11
adalah konservasi energi yang telah diskusikan. Bentuk selain konservasi energi juga seringdigunakan. Begitu juga tiga hukum (postulat) Newton berikut sangat bermanfaat.
1. Bila tidak ada gaya aksi yang bekerja pada suatu massa, maka massa ini akan tetapdalam keadaan diam atau ia akan bergerak dengan kecepatan tetap dalam suatulintasan garis lurus.
2. Gaya F yang bekerja pada suatu massa dan posisinya s memenuhi persamaan F =md2s
dt2
3. Aksi=-reaksi.
Hukum pertama sudah dikenal Galileo, sebagai suatu hasil eksperimen yang diselesaikan-nya. Hukum kedua diformulasikan oleh Newton ketika ia mengembangkan kalkulus.
Hukum-hukum Newton, khususnya yang pertama diilhami oleh eksperimen. Asalnyahukum-hukum dikembangkan untuk titik massa dan gerakan dengan lintasan lurus (rec-tilinear). Secara bertahap versi hukum-hukum tsb. dikembangkan pada media kontinu,gerakan berputar, pada fluida, gas dsb. Misalnya, bila torsi N dikenakan pada suatu titikdari suatu bodi dan momen inersia sekitar titik tsb. adalah J , maka N = J d2φ
dt2, dimana
d2φ
dt2menyatakan percepatan angular bodi.Setelah hukum-hukum Newton tersedia, pendekatan yang lain untuk menguraikan ger-
akan yang lebih umum dari struktur makanika dikembangkan. Salah satu dari pendekatanini adalah menggunakan konsep enerji kinetik dan enerji potensial yang membawa ke per-samaan gerakan dikenal sebagai persamaan Euler-Lagrange.
2.3.3 Elektromagnit
Ketika memodelkan phenomena elektromagnit, versi-versi hukum yang diungkapkan oleh4 persamaan Maxwell bisa digunakan, versi tsb. dilengkapi oleh persamaan Lorentz.
Dalam suatu medium dengan dielektrik konstan ǫ dan susceptibiliti µ, persamaanMaxwell berkaitan dengan medan elektrik E, magnetik B, kepadatan muatan ρ dan kepa-datan arus ι adalah sebagai berikut:
divE =1
ǫρ, rotE = −∂B
∂t, divB = 0, rotB = µ(ι+ ǫ
∂E
∂t).
Dalam persamaan-persamaan diatas semua variabel bergantung pada waktu t dan padaposisi (x, y, z). Selanjutnya E,B dan ι adalah besaran vektor, sedangkan ρ suatu skalar.Masing-masing div dan rot dibaca divergensi dan rotasi. Masing-masing persamaan per-tama dan ketiga pada persamaaan Maxwell diatas mengungkapkan konservasi dari muatanelektrik dan muatan magnetik. Kenyataan divB = 0 bisa dikaitkan dengan fakta bahwatidak ada monopoles magnetik (muatan terisolasi).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

12 Prinsip-prinsip pemodelan..
Gaya F pada suatu partikel dengan suatu muatan q bergerak dengan kecepatan v dalamsuatu medium seperti diuraikan diatas diberikan oleh persamaan Lorentz
F = q(E + v × B).
Disini × menyatakan perkalian silang (cross product). F dan v adalah vektor dan q skalar.Semua tiga variabel yang disebutkan bergantung pada waktu t dan posisi (x, y, z).
Persamaan-persamaan diatas sangat umum dan sering terlalu umum untuk tujuan ka-jian kita. Hukum-hukum lain yang lebih sederhana telah diperoleh sebelumnya. Sebagiandari hukum-hukum tsb. untuk rangkaian elektrik didiskusikan berikutnya.
Kebanyakan rangkaian yang disebutkan diatas dibangun dari elemen-elemen dasar mis-alnya resistor, kapasitor dan kumparan (coil).
1. Bila arus I melintasi resistor R maka voltage drop V pada resistor bisa dihitungdengan hukum Ohm
I
V
R
V = IR
2. Bila arus I dikirim ke kapasitor dengan kapasitas C, maka voltage drop V padakapasitor mempunyai hubungan sebagai berikut
IC
VdVdt
= IC
3. Terakhir, bila arus I melewati kumparan dengan induktansi L, maka voltage drop
pada kumparan diperoleh sebagai berikut V = LdI
dt,
L
b
V
I
dengan variabel V dan I adalah fungsi dari waktu t, sedangkan R,C dan L seringdiasumsikan konstan.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 13
Hukum-hukum diatas adalah phenomenalogi di alam. Hukum-hukum tsb. hasildari eksperimen. Selain dari pada itu dua hukum berikut juga memainkan perananyang penting dalam area jaringan elektrik. Hukum-hukum ini dinamakan hukumKirchhoff dan diformulasikan sebagai berikut.
4. Dalam setiap titik dari jaringan jumlah dari semua arus adalah nol.
5. Dalam setiap loop jaringan jumlah dari semua voltage drop adalah nol.
Catatan hukum Kirchhoff adalah jenis konservasi. Untuk menjelaskan dua hukumKirchhoff ditinjau jaringan yang diberikan dalam Gambar 2.1 dengan suatu sumbervoltage drop V konstan. Arah panah pada jaringan pada gambar dengan indeks i
✲
❄
✛
✲
✛❄
V
1
2
3
4
5
Gambar 2.1: Hukum Kirchoff.
menyatakan suatu elemen dimana suatu arus Ii yang mengalir menyebabkan voltagedrop Vi. Maka empat titik termasuk sumber memenuhi:
−I1 + I2 + I4 = 0,−I2 − I5 + I3 = 0,−I4 + I5 = 0, I1 − I3 = 0,
V = V1 + V2 + V3, V = V1 − V4 + V5 + V3, V = −V2 + V4 + V5.
2.4 Contoh-contoh
Dalam bagian ini diberikan beberapa contoh sistem. Contoh model yang mendasari dapatditurunkan dengan menggunakan hukum-hukum prinsip fisika sebagai mana yang telahdidiskusikan sebelumnya.
2.4.1 Pendulum terbalik
Dibahas gambar yang diberikan dalam Gambar 2.2. Poros dari pendulum ditempelkanpada kereta yang dapat bergerak dengan arah horizontal. Kereta digerakkan oleh suatumotor kecil yang pada saat waktu t bekerja suatu gaya u(t) pada kereta. Gaya tsb. adalahfariabel masukan pada sistem. Massa kereta adalah M , sedangkan massa pendulum m.Jarak antara titik poros pendulum ke pusat grafitasi massa adalah l. Dalam gambar H(t)menyatakan gaya reaksi horizontal dan V (t) adalah gaya reaksi vertikal pada poros. Sudutyang dibentuk oleh pendulum dengan sumbu vertikal adalah φ(t). Dengan menggunakanhukum kedua Newton, pada pusat grafitasi pendulum didapat persamaan berikut.
md2
dt2(s+ l sinφ) = H, (2.1)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

14 Prinsip-prinsip pemodelan..
✲u(t)
✲s
✻
✲
φ❄
mg
V
H
l
✕
☛
Gambar 2.2: Pendulum-terbalik.
md2
dt2(l cosφ) = V −mg, (2.2)
Id2φ
dt2= V l sin φ−Hl cosφ. (2.3)
Fungsi s(t) menyatakan posisi dari kereta pada saat t dan I adalah momen inersia terhadappusat grafitasi. Bila pendulum mempunyi massa yang terdistribusi seragam m
2lper satuan
panjang, maka momen inersia disekitar pusat grafitasi diberikan oleh:
I =m
2l
∫ l
−l
σ2dσ =1
3ml2.
Persamaan yang menguraikan gerakan kereta diberikan oleh.
Md2s
dt2= u−H. (2.4)
Substitusikan H, V dari (2.1) dan (2.2) pada (2.3) dan (2.4), diperoleh persamaan berikut.
4l3φ− g sin φ+ s cosφ = 0
(M +m)s+ml(φ cosφ− φ2 sin φ) = u,(2.5)
dimana tanda ˙ menyatakan turunan pertama terhadap waktu dan¨menyatakan turunankedua tehadap waktu, jadi s = ds
dtdan φ = d2φ
dt2.
Persamaan (2.5) bisa ditulis sebagai persamaan differensial tingkat satu dalam bentukvektor x diberikan oleh x = (φ, φ, s, s)T .
Persamaan gerakan pendulum terbalik juga bisa diperoleh melalui persamaan Euler-Lagrange menggunakan ungkapan berikut untuk total energi kinetik T dan energi potensialV
T = 12Ms2 + 1
2m2l
∫ 2l
0((s+ σφ cos φ)2 + (σφ sin φ)2)dσ
V = m2lg∫ 2l
0σ cosφdσ = mgl cosφ,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 15
dimana T adalah energi kinetik kereta yang disamping itu terdiri dari energi kinetik darisemua bagian elemen kecil pendulum dσ yang berjarak σ dari titik porosnya dengan 0 ≤σ ≤ 2l. Catatan serupa juga berlaku pada energi potensial. Definisikan Langragian L =T − V , setelah melakukan perhitungan integral diperoleh
L =1
2Ms2 +
1
2ms2 +mlsφ cosφ+
2
3ml2φ2 −mgl cosφ. (2.6)
Persamaan Euler-Lagrage yang menguraikan gerakan pendulum terbalik sekarang bisadiperoleh melalui persamaan berikut
d
dt(∂L
∂φ)− ∂L
∂φ= 0,
d
dt(∂L
∂s)− ∂L
∂s= u.
Dalam persamaan-persamaan diatas variabel V bergantung pada φ, φ, s dan s. Jadi untukT dan V seperti diatas diperoleh
∂L
∂φ= mls cosφ+
4
3ml2φ,
hal yang sama pula untuk ∂L∂s, ∂L∂s
dan ∂L∂φ
.
�
Latihan 1 Asumsikan bahwa sudut φ dari pendulum dengan garis vertikal diukur. Mis-alkan pengukuran ini dinyatakan dengan variabel y,yaitu y = φ. Perluh diperhatikan bahway dan variabel yang lainnya juga φ, φ, s, s dan u adalah fungsi dari waktu t. Bila vektorx = (φ, φ, s, s)T , maka dapatkan fungsi f(x, u) dan h(x, u) sedemikian hingga pendulumterbalik bisa diuraikan sebagai
x = f(x, u), y = h(x, u).
Disini x = dxdt
= (φ, φ, s, s)T .
Latihan 2 Bila variabel L seperti yang diberikan dalam (2.6), maka turunkan persamaangerakan dari pendulum terbalik dengan menggunakan persamaan Euler-Lagrange.
Latihan 3 Dalam contoh diatas kereta bergerak secara horizontal. Sekarang diubah keretahanya bergerak pada arah vertikal dan hanya gaya vertikal yang bisa berpengaruh, sedan-gkan gravitasi tetap bertindak secara vertikal. Selidiki bagaimana persamaan berubah dalamcontoh diatas.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

16 Prinsip-prinsip pemodelan..
θ■
❘r
pusat bumilintasan
satelit
Gambar 2.3: Dinamika setelit.
2.4.2 Dinamika satelit
Misalkan satelit dengan massa ms mengelilingi bumi sebagai pusatnya. Lihat juga Gam-bar 2.3. Sebagai satelit yang mengelilingi bumi sebagai lintasannya, dalam hal ini akanmemudahkan bila posisi dan kecepatan disajikan dalam koordinat kutub r dan θ dan tu-runan pertamanya terhadap waktu t masing-masing adalah r dan θ dengan bumi berpusatpada posisi pusat lintasan (r = 0).
Kecepatan radial satelit adalah r sedangkan kecepatan tangensialnya adalah rθ. Untukmenggunakan hukum Newton diperlukan kedua kecepatan tsb. selain itu juga percepatan-nya. Masing-masing percepatan radial dan percepatan tangensial satelit diberikan olehr − rθ2 dan 2rθ + rθ. Pengertian mengenai kecepatan/percepatan radial dan tangensialadalah pengertian yang elementer banyak dijumpai dalam teksbook mekanika.
Gerakan dari satelit mengelilingi bumi akan dipengaruhi gaya grafitasi bumi. Gaya iniberarah secara radial dan besarnya sama dengan Gmbms
r2, dimana mb menyatakan massa
bumi sedangkan G adalah grafitasi bumi yang dalam hal ini dipertimbangkan konstan.Selain itu pula berkaitan dengan grafitasi, gaya radial dan gaya tangensial masing-masingdinotasikan sebagai Fs dan Fθ. Gaya Fr adalah gaya dengan arah menjauhi bumi. Keduagaya Fr dan Fθ disebabkan oleh dorongan jet yang ada pada satelit.
Pemakaian dari hukun Newton kedua dalam arah radial dan tangensial menghasilkan
ms(r − rθ2) = −Gmbms
r2+ Fr
ms(2θr + rθ) = Fθ.(2.7)
Catatan: Persamaan diatas bisa diperoleh juga dari persamaan Euler-Lagrange. Olehkarenanya energi kinetik T dan energi potensial V dari satelit diberikan sebgai berikut
T = 12ms(r
2 + (rθ)2)V = −Gmbms
r.
Selajutnya dengan Lagrangian diberikan oleh L = T − V , diperoleh persamaanddt(∂L∂r)− ∂L
∂r= Fr,
ddt(∂L∂θ)− ∂L
∂θ= Fθ.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 17
�
Latihan 4 Asumsikan bahwa jarak r diukur dan dinyatakan dengan y. Selanjutnya diperke-nalkan vektor x = (r, θ, r, θ)T dan u = ( Fr
ms, Fθ
ms)T , dapatkan fungsi-fungsi f(x, u) dan h(x, u)
sehingga model satelit diatas dapat diuraikan sebagai
x = f(x, u), y = h(x, u).
Latihan 5 Mengacu pada persamaan Lagrangian diatas, turunkan persamaan Euler-Langrangeuntuk memperoleh persamaan gerakan dari setelit.
2.4.3 Batang dipanasi
Misalkan suatu batang metal panjang L yang diisolasi dari keadaan sekitarnya kecuali padabagian ujung kirinya dimana batang dipanasi oleh suatu pancaran dengan perpindahanpanas u(t).
✲u(t)
0 Lr
Temperatur batang pada posisi r dengan 0 ≤ r ≤ L dinyatakan oleh T (t, r), dimana radalah fariabel yang berkaitan dengan posisi. Agar supaya dapat menentukan perilakupanas dari batang perlu diketahui distribusi temperatur awal T (t0, r), 0 ≤ r ≤ L danu(t), t ≥ t0. Keadaan dari sistem adalah T (t, .) : [0, L] → R. Dari fisika diketahui bahwaT memenuhi persamaan differensial parsial:
∂T (t, r)
∂t= c
∂2T (t, r)
∂r2, (2.8)
dimana c adalah suatu konstanta karakteristik batang. Pada bagian sebelah kiri didapatkan
−A∂T (t, r)∂t
∣
∣
∣
∣
r=0
= c, (2.9)
dimana A luas permukaan-lintang batang. Pada bagian kanan batang karena terisolasi,diperoleh
∂T (t, r)
∂t
∣
∣
∣
∣
r=L
= 0. (2.10)
Evolusi keadaan yang diuraikan oleh persamaan differensial parsial (2.8) dengan kondisi-kondisi batas (2.9) dan (2.10). Dalam contoh masalah ini masukan hanya masuk melaluikondisi-kondisi batas. Dalam masalah yang lainnya masukan bisa juga terdistribusi. Dap-atkah anda memberikan suatu interpretasi persamaan differensial berikut
∂T (t, r)
∂t= c
∂2T (t, r)
∂r2+ u(t, r)?
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

18 Prinsip-prinsip pemodelan..
2.4.4 Rangkaian Elektrik
Misalkan jaringan berikut yang terdiri dari resistor R, kapasitor C dan kumparan L.Jaringan dihubungkan dengan voltage drop V dan voltage drop pada kapasitor diukur.Arus dinotasikan dengan I.
V
RI
C VCL
Bila VR, VC dan VL masing-masing menyatakan voltage drop pada resistor, kapasitor dankumparan, maka dari hukum elektrik yang telah disebutkan pada subbagian sebelumnyadiperoleh
VR = RI, VC =1
CQ, VL = L
dI
dt,
dimana Q menyatakan muatan elektrik pada kapasiator yang memenuhi I = dQ
dt. Menurut
hukum Kirchhoff V = VR + VC + VL. Jadi
V = RI +1
CQ + L
dI
dt, I =
dQ
dt. (2.11)
Sekarang disusun kembali persamaan diatas sebagai berikut
d
dt
(
QI
)
=
(
0 1− 1
LC−R
L
)(
QI
)
+
(
01L
)
V,
VC = ( 1C
0)
(
QI
)
Didefinisikan u = V, y = VC dan
x =
(
QI
)
, A =
(
0 1− 1
LC−R
L
)
, B =
(
01L
)
, C = (1
C0)
dimana perlu ditekankan bahwa C yang baru didefinisikan adalah matriks yang berukuran1×2 hal ini dijelaskan supaya tidak ada kebingungan dengan kapasitor yang juga digunakandengan simbol yang sama. Dengan cara penulisan tsb. didapat uraian sistem berikut ini
x = Ax+Bu, y = Cx.
Catatan : Eleminasi I dari persamaan (2.11) menghasilkan persamaan differensial biasatingkat dua dengan koefisien konstan sebagaimana berikut
Ld2Q
dt2+R
dQ
dt+
1
CQ = V. (2.12)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 19
Jenis dari persamaan ini tidak hanya terjadi dalam pemodelan jaringan elektrik, tetapijuga muncul pada disiplin lainnya. Misalnya, ketika memodelkan suatu struktur makanikaseperti dalam Gammbar 2.4 berikut.
✲
✲
Fl
M
sf
k
tembok
Gambar 2.4: Struktur Mekanika.
Struktur terdiri dari suatu massa M dihubungkan ke tembok vertikal melalui suatu pe-gas dengan konstanta pegas k dan suatu peredam dengan faktor redaman f . Pada massabekerja suatu gaya luar Fl, dalam hal ini diasumsikan massa bergerak hanya secara hor-izontal grafitasi tidak mempunyai peranan. Bila s menyatakan posisi massa dari posisisetimbangannya. Menurut hukum kedua Newton
Ms = −ks− f s+ Fl.
JadiMs + f s+ ks = Fl.
Persamaan ini serupa dengan Persamaan (2.12) yang telah diturunkan pada jaringan listriksebelumnya. Yaitu
L ≡M, R ≡ f,1
C≡ k,
dQ
dt≡ s dan
d2Q
dt2≡ s.
Contoh lain dari persamaan jenis ini bisa didapat pada pemodelan phenomena dalamdisiplin seperti akustik, kimia dan hidrolik.
2.4.5 Dinamika populasi
Misalkan suatu populasi tertutup manusia dalam suatu negara, atau populasi binatangatau organisme di alam. Misalkan N(t) menyatakan banyaknya individu di dalam popu-lasi pada waktu t. Asumsikan bahwa N(t) sebegitu besar dan merupakan suatu fariabelkontinu. Bila B(t, t + δ) dan D(t, t + δ) masing-masing menyatakan banyaknya kelahirandan kematian dalam interval (t, t + δ], maka konservasi dari induvidu-induvidu diberikanoleh
N(t + δ)−N(t) = B(t, t + δ)−D(t, t+ δ).
MisalkanB(t, t + δ) = b(t)δ + o(δ), D(t, t+ δ) = d(t)δ + o(δ)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

20 Prinsip-prinsip pemodelan..
dimana o(δ) menyatakan suatu fungsi yang cenderung lebih cepat menuju ke nol dari padaδ. Masing-masing fungsi b(t) dan d(t) adalah fungsi laju kelahiran dan laju kematian. Lagipula diasumsikan b(t) dan d(t) masing-masing berbanding lurus dengan N(t), yaitu
b(t) = bN(t) dan d(t) = dN(t)
untuk konstanta b dan d. Jadi
N(t + δ)−N(t) = (b− d)N(t)δ + o(δ).
Didefinisikan r = b−d, bagi kedua ruas persamaan diatas dengan δ dan untuk δ mendekatinol diperoleh
N(t) = rN(t).
Persamaan ini mempunyai penyelesaian N(t) = N(t0)er(t−t0). Terlihat bahwa, banyaknya
individu meningkat bila r > 0 dan menurun bila r < 0.Umumnya laju pertumbuhan dari suatu populasi bergantung pada beberapa faktor
selain dari pada yang telah disebutkan diatas yaitu hanya tergantung pada laju kelahirandan kematian. Khususnya sering tergantung pada bagaimana interaksi internal popolasitsb. Misalnya, kepadatan populasi dari suatu negara, maka laju kematian bisa meningkatkarena akibat keterbatasan tempat dan sumber-sumber alam, atau karena kerentanan yangtinggi terhadap penyakit. Asumsikan populasi tidak akan terdiri lebih dariK > 0 individu.,model diatas bisa dimodifikasi sebagai berikut
N(t) = r(1− N(t)
K)N(t).
Persamaan ini disebut sebagai persamaan Logistik.Selanjutnya model bisa dimodifikasi dalam cara berikut. Disini diasumsikan bahwa
spesies dari populasi diatas adalah mangsa dari populasi lainnya yaitu pemangsa yangterdiri dari M(t) individu. Dalam hal ini cukup beralasan diasumsikan r > 0, sehinggapersamaan sebelumnya berubah menjadi
N(t) = r(1− N(t)
K)N(t)− αN(t)M(t)
dengan α > 0. Modifikasi ini berarti bahwa laju penurunan mangsa berbanding lurusdengan mangsa dan pemangsanya. Sebagai model dari pemangsa, persamaan berikut bisadigunakan
M(t) = −cM(t) + βN(t)M(t)
dengan c > 0 dan β > 0. Kedua persamaan yang disebutkan diatas secara bersamaan di-namakan model mangsa-pemangsa. Catatan, bila r > 0 berarti bahwa populasi mangsamempunyai suatu kecenderungan alamia meningkat, sedangkan bila c > 0 populasi pe-mangsa mempunyai kecenderungan alamia menurun.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 21
Sekarang diasumsikan banyaknya mangsa bisa tak terbatas (k = ∞). Hal ini bisadipikirkan ikan-ikan kecil sebagai mangsa dan ikan salam sebagai pemangsanya. Asum-sikan bahwa dengan adanya faktor penangkapan u1(t) terhadap mangsa begitu juga fak-tor penangkapan u2(t) terhadap pemangsa. Model sebelumnya dari mangsa-pemangsaberubah sebagai berikut
N(t) = rN(t)− αN(t)M(t)−N(t)u1(t)= (r − αM(t)− u1(t))N(t)
M(t) = βN(t)M(t)− cM(t)−M(t)u2(t)= (βN(t)− c− u2(t))M(t)
Jenis model ini dikenal sebagai suatu model dari Volterra-Lotka. Bila banyaknya ikansalam dimonitor dengan suatu cara adalah y(t), maka model yang telah ada bisa diuraikansebagai suatu sistem berbentuk
x(t) = f(x(t), u(t))y(t) = h(x(t), u(t)),
dimanax(t) = (x1(t) x2(t))
T = (N(t) M(t))T ,
u(t) = (u1(t), u2(t))T
dan fungsi
f(x, u) =
(
(r − αx2 − u1)x1(βx1 − c− u2)x2
)
,
h(x, u) = x2.
�
Latihan 6 Untuk masing-masing model diatas dapatkan situasi stasioner. Situasi iniadalah situasi dimana variabel-variabel tetap pada tingkat konstan, oleh karenanya turunanterhadap waktu adalah nol.
�
2.4.6 Ketergantungan umur dinamika populasi
Misalakan lagi suatu populasi. Untuk mengungkapkan ukuran populasi N sebagai fungsidari laju kelahiran b, misalkan P (r, t) probabilitas seseorang lahir pada waktu t − r, iatetap hidup pada waktu t (dimana dia berumur umur r). Maka
N(t) =
∫ t
−∞P (t− s, t)b(s)ds.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

22 Prinsip-prinsip pemodelan..
Disini diasumsikan bahwa fungsi P dan b sedemikian hingga integral diatas terdifisi denganbaik. Adalah beralasan untuk mengasumsikan bahwa P (r, t) = 0 dengan r > L untukL > 0 (tak seorangpun akan mencapai umur lebih dari L). Maka
N(t) =
t∫
t−L
P (t− s, t)b(s)ds.
Bila p kontinu dalam semua argumennya dan bila b kontinu bagian demi bagian (yaitu bdiskontinu di sejumlah hingga titik disetiap interval hingga dan limit kiri dan kanan darib dititik diskontinu ada), maka integral diatas ada.
Kembali pada integral yang semula dan asumsikan bahwa suatu fungsi g ada sedemikianhingga P (t− s, s) = g(t− s), didapat
N(t) =
t∫
−∞
g(t− s)b(s)ds.
Bila integral ini ada untuk semua fungsi laju kelahiran b yang bisa diterima, maka akan di-tunjukkan kemudian bahwa hal ini bisa diinterpretasikan sebagai suatu sistem masukan/ke-luaran invarian-waktu dan kausal ketat (strictly causal). Pengertian dari invarian waktudan kausal (ketat) akan dibuat secara tepat pada subbagian mendatang. Secara harfiah in-varian waktu berarti bahwa waktu (kalender) mutlak tidak berperan sedangkan kekausalanberarti bahwa keadaan mendatang tidak mempengaruhi proses perilaku yang terjadi saatini. Untuk sistem yang demikian probabilitas bahwa seseorang tetap hidup mencapai usiar hanya ditentukan oleh r sendiri bukan oleh tanggal kelahirannya.
Latihan 7 Misalkan p menyatakan densiti populasi yang bergantung pada waktu t danumur r. Banyaknya orang yang berumur diantara r dan r + dr pada saat waktu tertentut diberikan oleh p(t, r). Didifinisikan angka kematian µ(t, r) sebagai berikut: µ(t, r)drdtadalah sebagian kecil orang yang berumur diantara [r, r+ dr] yang meninggal pada intervalwaktu [t, t+ dt]. Tunjukkan bahwa p memenuhi persamaan differensial berikut:
∂p
∂r+∂p
∂t= −µp. (2.13)
Misalkan distribusi umur awal diberikan oleh:
p(0, r) = p0(r), 0 ≤ r ≤ 1,
dan angka kelahiranp(t.0) = u(t), t ≥ 0.
Disini diasumsikan bahwa umur r diskala sedemikian hingga tak seorangpun mencapai umurr > 1. Fungsi u(t) adalah masukan dari sistem dan y(t) sebagai keluaran dari sistem
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 23
misalnya dalam hal ini adalah banyaknya orang yang berumur diantara a dan b dengan0 < a < b < 1 yang berarti bahwa
y(t) =
∫ b
a
p(t, r)dr.
�
2.4.7 Bioreaktor
Tinjau suatu bioreaktor yang disajikan dalam Gambar 2.5. Dalam reaktor terdapat biomassa
✲✲qm q
D D
biomassa
+gula
Gambar 2.5: Bioreaktor.
(organisma) yang diberi makanan gula (nutrisi). Nutrisi tambahan disuplai prodak mening-galkan reaktor. Dinotasikan hal berikut
• p(t) adalah konsentrasi biomassa dalam reaktor (g/l)
• q(t) adalah konsentrasi gula dalam reaktor (g/l)
• qm(t) adalah konsentrasi gula yang dialirkan kedalam reaktor (g/l)
• D(t) adalah aliran dari air-gula yang melewati reaktor (1/det yaitu fungsi dari isireaktor per detik)
Persamaan yang dibentuk reaksi didalam reaktor diberikan sebagai berikut
d
dt
(
pq
)
=
(
pertumbuhan alamia−Dpkonsumsi alamia−Dq +Dqm
)
dimana masing-masing Dp dan Dq menyatakan jumlah biomassa dan jumlah gula yangkeluar dari reaktor danDqm jumlah gula yang disuplai ke dalam reaktor. Untuk melengkapiuraian matematik beberapa hukum empirik yang berkaitan dengan biomassa dan konsen-trasi gula digunakan. Disini hukum-hukum menyatakan bahwa pertumbuhan biomassasebanding dengan konsentrasinya begitu juga komsumsi dari gula sebanding dengan kon-sentrasinya. Selanjutnya, diasumsikan bahwa kesebandingan tsb. hanya bergantung padakonsentrasi gula. Jadi ada fungsi µ dan ν masing-masing bergantung pada konsentrasi
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

24 Prinsip-prinsip pemodelan..
gula yang menentukan laju pertumbuhan biomassa dan laju pertumbuhan komsumsi gula,hubungannya diberikan oleh persamaan berikut
d
dt
(
pq
)
=
(
µ(q)p−Dp−ν(q)p−Dq +Dqm
)
.
Latihan 8 Asumsikan aliran air-gula dalam reaktor D adalah tetap, tetapi konsentrasigula qin dalam aliran ini dapat dikontrol. Selanjutnya asumsikan bahwa konsentrasi dalamgula dari aliran yang keluar diukur. Uraikan proses diatas sebagai suatu sistem dengankeadaan masukan dan keluaran.
Latihan 9 Seperti halnya persamaan diatas, tetapi sekarang konsentrasi gula qin dalamaliran yang masuk adalah tetap dan banyaknya aliran D bisa dikontrol.
�
2.4.8 Transport polusi
Tijau suatu sungai (’dimensi-satu’) terkontaminasi oleh material organik yang terlarutdalam air. Aksi dari bakteri ini menurunkan kadar air.
✲sungai v
Dinotasikan yang berikut ini
• ρ(r, t) adalah kepadatan pollutan didalam sungai pada posisi r dan waktu t (kg/m)
• v(r, t) adalah kecepatan pollutan dan air dalam sungai pada posisi r dan waktu t(m/det)
• q(r, t) adalah fluks pollutan didalam sungai pada posisi r dan waktu t (kg/det)
• k(r, t) adalah perubahan yang mana pollutan meningkat didalam sungai pada posisir dan waktu t (kg/(mdet))
Konservasi massa bisa diungkapkan sebagai berikut
∂ρ
∂t+∂q
∂r= k.
Dalam hal ini dua hal bisa dipertimbangkan
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 25
1. Hanya terdapat afeksi. Maka ρ, q dan v direlasikan oleh q = ρv. Ini berarti bahwafluks pollutan hanya disebabkan oleh phenomena tranportasi.
2. Hanya terdapat diffusi. Maka ρ dan q direlasikan oleh q = −µ∂ρ
∂r, dimana µ adalah
konstanta yang bergantung pada posisi r dan waktu t.
Bila diffusi dan afeksi digabungkan maka q = ρv − µ∂ρ
∂r. Asumsikan bahwa µ konstan
tidak tergantung pada posisi r dan waktu t dan v tidak tergantung pada r tetapi hanyabergantung pada t, maka persamaan konservasi massa bisa ditulis sebagai
∂ρ
∂t= − ∂
∂r(ρv − µ
∂ρ
∂r) + k = µ
∂2ρ
∂r2− v
∂ρ
∂r+ k
Untuk memodelkan aksi bakteri yang menurunkan kadar air dan peranan industri, asum-sikan k = −νρ + β, dimana ν tidak tergantung pada r dan t dan β adalah suatu besaranpollutan yang disebabkan oleh industri. Maka diperoleh persamaan berikut
∂ρ
∂t= µ
∂2ρ
∂r2− v
∂ρ
∂r− νρ+ β.
Catatan : Dengan konstanta µ, v dan ν persamaan terakhir secara formal bisa ditulis se-bagai
x = Ax+ β,
dimana x = ρ dan A = µ ∂2
∂r2− v
∂
∂r− ν adalah mapping linier diantara ruang fungsi yang
sesuai.
�
2.4.9 Sistem Biomedikal
Dalam contoh ini diturunkan suatu model sistem non-engineering. Bila suatu obat diin-jeksikan kedalam tubuh, secara tiba-tiba akan menaikkan konsentrasi dari obat didalamdarah. Dalam beberapa saat, beberapa bagian obat diedarkan dari aliran darah (pengelu-aran yang berhubungan dengan ginjal) dan sisa bagian obat yang lainnya diubah kedalamsenyawa kimia (metabolisma). Sebagai suatu hasil, konsentarasi obat didalam tubuh secaraberangsur-angsur berkurang. Akan dibuat suatu model matematika dari proses yang manakonsentrasi obat pada sebarang waktu setelah injeksi dapat dihitung. Catatan bahwa, ben-tuk dari obat yang dimasukkan adalah suatu injeksi satu-suntikan, injeksi pada intervalteratur atau infusi kontinu melewati suatu tetesan garis.
Peubah-peubah dalam masalah ini adalah
densitas obat atau konsentrasi = c(t), (mg/liter)laju masuknya obat = qi(t), (mg/det)laju keluarnya obat = qo(t), (mg/det).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

26 Prinsip-prinsip pemodelan..
Secara umum, laju volume dari keluarnya obat (pengeluran yang berhubungan denganginjal + metabolisma) adalah konstan, misalnya K. Oleh karena itu
qo(t) = Kc(t). (2.14)
Juga, total volume dari darah dalam tubuh adalah konstan, misalnya V . Jadi K dan Vadalah dua parameter dalam sistem. Dengan mengikuti hukum kontinuitas persamaanyaitu
laju yang masuk = laju yang keluar + laju dari akumulasi. (2.15)
didapat
qi(t) = qo(t) +dV c(t)
dt.
Substitusikan Persamaan (2.14) pada persamaan yang terakhir didapat
Vdc(t)
dt+Kc(t) = qi(t). (2.16)
�
2.4.10 Suatu sistem Ketinggian Zat Cair
Gambar 2.6 menunjukkan sistem tingkat zat cair. Cairan yang mengalir masuk dan yangmengalir keluar (inflow dan outflow) dari tangki dikontrol oleh katup inlet dan outlet.
katup inlet
katup outlet
Q + qi
Q + qoRH + hi
C
Gambar 2.6: Sistem Ketinggian Zat Cair
Dalam kondisi steadi katup-katup buka sehingga laju dari inflow sama dengan laju darioutflow. Dalam kondisi ini, tingkat (ketinggian) cairan dalam tangki akan menjadi konstan.Selanjutnya, asumsikan bahwa secara meningkat katup inlet buka, laju inflow meningkat.Suatu hal menarik bagaimana mendapatkan ketinggian cairan didalam tangki yang berubahseiring dengan berubahnya waktu.
Peubah dari sistem adalah laju aliran input dan output; dan ketinggian cairan dalamtangki. Parameter-parameter adalah resistan katup R dan luasan melintang dari tangki.Pertama dibahas karakteristik dari katup.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 27
Bila aliran yang melewati katup adalah laminar, laju aliran dan beda didalam ketinggi-an cairan yang melintasi katup yang dinamakan ’head’, adalah berhubungan dengan hukumOhm, yaitu
Q =H
R, (2.17)
dengan
Q = laju aliran cairan yang melintasi katup;H = head yang melintasi katup;R = resistan (tahanan) dari katup.
Apapun itu, yang lebih biasa aliran adalah turbulen. Dalam hal ini hubungan diantaralaju aliran dan head adalah non-linear yang diberikan oleh
Q =
√
H
R. (2.18)
Meggunakan hubungan non-linear ini menyebabkan model sistem yang dibahas juga non-linear. Analisa dengan model non-linear akan lebih kompleks, oleh karena itu menggunakansuatu model linear lebih disukai. Untuk mendapatkan suatu model linear, suatu cara yangdisebut pelinearan disekitar suatu titik sering digunakan.
Hubungan Persamaan 2.18 diberikan dalam Gambar 2.7.
Q
H
Laju aliran
Head
Q1
H1
P
q
h
0
Gambar 2.7: Karakteristik Katup
Kemiringan dari kurva karakteristik katup adalah berbeda pada titik-titik yang berbeda.Bagaimanapun bila diasumsikan bahwa perubahan pada head adalah kecil disekitar titikP (Q1, H1), maka ’penaikan’ resistan adalah konstan disekitar P , yaitu
h
q= R atau q =
h
R. (2.19)
Persamaan (2.19) memberikan suatu hubungan linear diantara perubahan kecil q dan hdisekitar titik P (Q1, H1).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

28 Prinsip-prinsip pemodelan..
Kembali pada masalah model sistem ketinggian cairan yang diberikan oleh Gambar 2.6.Pertanyaan yang perluh dijawab adalah hukum fisika apa untuk membangun aliran fluidapada situasi ini? Dengan kata lain, apa hubungan diantara laju inflow, laju outflow danketinggian cairan? Hubungan yang demikian ini dapat diturunkan dari suatu prinsip umumyang dinyatakan sebagai berikut.
input = output + akumulasi. (2.20)
Persamaan (2.20) dinamakan persamaan kontinuitas dan berguna dalam berbagai sistemfisika, misalnya perpindahan massa, perpindahan panas, sistem aliran dsb. Bahkan hukumarus Kirchhoff pada suatu titik bisa dipandang sebagai suatu bentuk khusus dari persamaankontinuitas. Tidak ada akumulasi dari arus pada satu titik. Maka dari itu laju inflow arusharus sama dengan laju outflow arus pada suatu titik. Dengan kata lain arus yang masukpada suatu titik sama dengan arus yang keluar dari suatu titik.
Pada masalah yang dibahas, laju dari aliran input dan output adalah penting. Lakukanderivatif pada Persamaan (2.20), didapat
laju inflow = laju outflow + laju dari akumulasi. (2.21)
Akumulasi dari cairan dalam tangki adalah luasan melintang dikalikan dengan peruba-gan ketinggian cairan, atau akumulasi = A× h. Oleh karena itu, laju akumulasi = Adh(t)
dt.
Sehingga didapat
qi(t) = qo(t) + Adh(t)
dt. (2.22)
Tetapi dari Persamaan (2.19), didapat
qo(t) =h
R. (2.23)
Substitusikan Persamaan (2.23) kedalam Persamaan (2.22), didapat
ARdh(t)
dt+ h(t) = Rqi(t). (2.24)
Bandingkan bentuk model Persamaan (liqtanklevel1) dengan model rangkain elektrik yangdiberikan oleh Gambar berikut.
b
b
i(t)
v(t)
C
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 29
Gunakan Hukum arus dititik Kirrchoff didapat
Cdv(t)
dt+v(t)
R= i(t),
atau
CRdv(t)
dt+ v(t) = Ri(t). (2.25)
Terlihat bahwa Persamaan (2.24) dan Persamaan (2.25) mempunyai kesamaan bentuk .
�
2.4.11 Sistem dua kereta glinding
Diberikan sistem dua kereta glinding sebagai mana dalam Gambar 2.8. Misalkan M1,M2
dan p(t), q(t) masing-masing menyatakan massa kereta 1, kereta 2 dan posisi kereta 1,kereta 2, sedangkan b1, b2 adalah damping (peredam) dari kereta 1, kereta 2 dan u(t)adalah gaya luar yang bekerja pada sistem.
q(t)
p(t)
M2 M1
Kereta 1Kereta 2 u(t)k1k2
b1b2
Gambar 2.8: Dua Kereta Glinding
Dengan menggunakan hukum kedua Newton, untuk massa M1 didapat
M1p(t) = u(t) + fs + fd = u(t)− k1(p(t)− q(t))− b1(p(t)− q(t)),
atauM1p(t) + b1p(t) + k1p(t) = u(t) + k1q(t) + b1q(t), (2.26)
dengan masing-masing p(t) dan q(t) adalah percepatan massa M1 dan M2. Dengan caraserupa, untuk massa M2 didapat
M2q(t) = k1(p(t)− q(t)) + b1(p(t)− q(t))− k2q(t)− b2q(t),
atauM2q(t) + (k1 + k2)q(t) + (b1 + b2)q(t) = k1p(t) + b1p(t). (2.27)
Dengan demikian model dari sistem diberikan oleh gabungan dari Persamaan (2.26) dan(2.27).
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

30 Prinsip-prinsip pemodelan..
2.4.12 Ekonomi nasional
Tinjau model sederhana berikut dari ekonomi nasional suatu negara. Misalkan
y(k) total pendapatan nasional di tahun ke-k
c(k) pembelanjaan konsumer di tahun ke-k
i(k) investasi di tahun ke-k
u(k) pembelanjaan pemerintah di tahun ke-k
Untuk model diatas dibuat asumsi berikut
1. y(k) = c(k) + i(k) + u(k)
2. Pembelanjaan konsumer adalah suatu fungsi dari total pendapatan tahun sebelum-nya: c(k) = my(k − 1) dimana 0 ≤ m ≤ 1
3. Investasi di tahu ke-k bergantung pada peningkatan pembelanjaan konsumer daritahun ke-(k−1) ke tahun ke-k: i(k) = µ(c(k)−c(k−1)), dimana µ konstanta positif.
Catatan, asumsi pertama adalah jenis konservasi, sedangkan dua asumsi lainnya berdasarkanpada observasi.
Dengan asumsi diatas evolusi dari ekonomi nasional bisa diuraikan sebagai berikut.
i(k + 1)− µc(k + 1) = −µc(k)c(k + 1) = my(k) = m(i(k)− µc(k)) +m(1 + µ)c(k) +mu(k)
Bila vektor keadaan didefinisikan sebagai x(k) = (x1(k), x2(k))T dengan x1(k) = i(k) −
µc(k) dan x2(k) = c(k), maka persamaan evolusi keadaan diberikan oleh(
x1(k + 1)x2(k + 1)
)
=
(
0 −µm m(1 + µ)
)(
x1(k)x2(k)
)
+
(
0m
)
u(k)
dan persamaan keluaran diberikan oleh
y(k) = (1 1 + µ)
(
x1(k)x2(k)
)
+ u(k)
Dalam hal ini diperoleh suatu sistem diskrit waktu-invarian dari model ekonomi nasional.
Latihan 10 Misalkan pemerintah memutuskan untuk menghentikan pembelanjaan daritahun k = 0. Jadi u(k) = 0 untuk k ≥ 0. Selanjutnya misalkan bahwa dalam tahunk = 0 konsumen tidak membelanjakan uangnya dan investasi sama dengan 1. Jadi,c(0) = 0, i(0) = 1. Selidiki bagaimana total pendapatan nasional berubah untuk k ≥ 0.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Contoh-contoh.. 31
Latihan 11 Untuk model ekonomi diatas, dapatkan situasi stasioner bila u(k) = 1 untuksemua k, yaitu situasi yang tidak berubah lagi dengan adanya perubahan tahun bila u(k) = 1untuk semua k.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

32 Prinsip-prinsip pemodelan..
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono
Bab 3Sistem differensial linier
Pada bab ini dikaji suatu sistem yaitu sistem linier. Pada kajian ini akan diuraikanbagaimana mendapatkan sistem linier dari suatu sistem non-linier, hal ini dikenal den-gan apa yang dinamakan dengan pelinearan. Namum sebelum itu, pada bagian berikutini diberikan suatu diskripsi dari suatu sistem yang berkenaan dengan hubungan diantaramasukan dan keluaran serta kajian "dalam" (internal) dari sistem tsb.
3.1 Uraian dalam dan uraian luar suatu sistem
Suatu pertanyaan secara wajar muncul adalah bagaimana hubungan antara masukan dankeluaran dari suatu sistem, atau apakah suatu keluaran yang dihasilkan bergantung secaratunggal pada masukan yang dikenakan pada sistem tsb. Ada faktor lain di dalam sistemyang menentukan suatu keluaran sistem. Misalnya, pada sistem rangkaian listrik arusmasih ditentukan oleh muatan yang sudah ada dalam rangkaian sebelum tegangan di-berikan. Sesuatu didalam sistem yang ikut mempengaruhi keluaran sistem dinamakankeadaan (state) dari sistem.
Uraian "dalam" suatu sistem adalah: suatu gambaran yang diberikan sistem dimanasuatu keluaran sistem pada setiap saat hanya bergantung pada "keadaan" sistem, padasaat yang sama masukan mempengaruhi keluaran lewat perubahan "keadaan" sistem tsb.
Pada suatu sistem fisika, fariabel "keadaan" lewat suatu elemen yang menyimpan en-ergi. Sedangkan suatu sistem bila disajikan dalam suatu model matematika dalam halini persamaan differensial, pemilihan fariabel "keadaan" dapat ditentukan lewat keluarandari operator integrator yang dinotasikan dengan
∫
. Pemilihan friabel keadaan ini akanmemudahkan untuk meyelesaikan model matematika dari sistem yang disajika dalam ben-tuk persamaan differensial biasa.
Pemilihan fariabel "keadaan" suatu sistem tidak tunggal. Pemilihan fariabel keadaanbaik lewat elemem-elemen yang menyimpan energi ataupun lewat keluran dari suatu inte-grator tidak akan mengubah perilaku sistem bila ditinjau dari masukan dan keluran sistem,
33

34 Sistem differensial linier..
artinya bahwa perilakunya memberikan diskripsi yang tepat sama. Makna matematisnya,perilaku ini akan memberikan dua sistem yang ekivalen. Perbedaan pemilihan fariabelkeadaan ini bisa diilustrasikan sebagai melihat suatu benda dari dua sudut pandang atauperspektif yang berbeda. Pandangan perspektif yang berbeda ini sangat mungkin munculdengan latar belakang dari yang memandangnya berkaitan dengan apa yang dibutuhkan-nya. Penjelasan pemilihan faribel keadaan ini akan dibahas lagi pada contoh yang berikut-nya.
Suatu sistem waktu kontinu secara umum formulasi matematikanya diberikan oleh ben-tuk persamaan :
dx(t)
dt= f (x(t), u(t), t) ,
dengan keadaan awal x(t0) = x0y(t) = g (x(t), u(t), t) ,
dimana
• x(t) menyatakan keadaan sistem saat waktu t,
• u(t) menyataka masukan dari sistem saat waktu t,
• y(t) menyatakan keluaran sistem saat waktu t.
Untuk sistem fisika, elemen-elemen yang menyimpan energi diberikan dalam tabelberikut:
Elemen energi fariabel fisika
kapasitor cv2
2voltage v
induktor Li2
2arus i
massa m mv2
2kecepatan translasi v
momen inersia Jω2
2kecepatan rotasi ω
pegas k kx2
2posisi x
kompressibiliti fluida V P 2L
2KBtekanan PL
kapasitor fluida ρAh2
2tinggi h
kapasitas thermal cθ2
2temperatur θ
Contoh berikut menjelaskan lagi bagaimana memilih fariabel keadaan dari sudut pan-dang elemen yang menyimpan energi dan dari sudut pandang keluaran suatu integratordari suatu sistem yang sama.
Contoh 4 Suatu rangkaian seri RLC yang diberikan dalam Gambar 3.1 voltage e(t) samadengan jumlah dari penurunan voltage (voltage drop) bila swicth ditutup diberikan olehpersamaan berikut:
VL + VR + VC = e(t) (3.1)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Uraian dalam dan uraian luar suatu sistem.. 35
e(t)
i(t)
K
i(t)
L
R
C
Gambar 3.1: Rangkaian seri RLC.
atau Ldidt
+ Ri(t) + 1C
∫
i(t)dt = e(t). Rangkain memuat dua elemen yang menyimpanenergi, yaitu induktor L dan kapasitor C. Misalkan x1(t) = VC dan x2(t) = i(t), didapat
x1(t) =1
Cx2(t)
x2(t) = − 1
Lx1(t)−
R
Lx2(t) +
1
Le(t)
atau dalam bentuk matriks(
x1(t)x2(t)
)
=
(
0 1C
− 1L
−RL
)(
x1(t)x2(t)
)
+
(
01L
)
e(t).
Bila masukan dari sistem u(t) = e(t) dan keluaran dari sistem y(t) = VC(t), didapat uraiansistem dalam fariabel keadaan sebagai berikut:
(
x1(t)x2(t)
)
=
(
0 1C
− 1L
−RL
)(
x1(t)x2(t)
)
+
(
01L
)
u(t)
y(t) =(
1 0)
(
x1(t)x2(t)
)
.
(3.2)
Catatan:
VC(t) =q
C=
1
C
∫
i(t)dt.
Untuk y(t) = VC(t) dan e(t) = u(t) persamaan (3.1) dapat ditulis dalam bentuk:
LCy(t) +RCy(t) + y(t) = u(t)
atau
y(t) +RC
LCy(t) +
1
LCy(t) =
1
LCu(t). (3.3)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono
36 Sistem differensial linier..
∫ ∫
✲✲ ✲y y y
Gambar 3.2: Keluaran dari integrator.
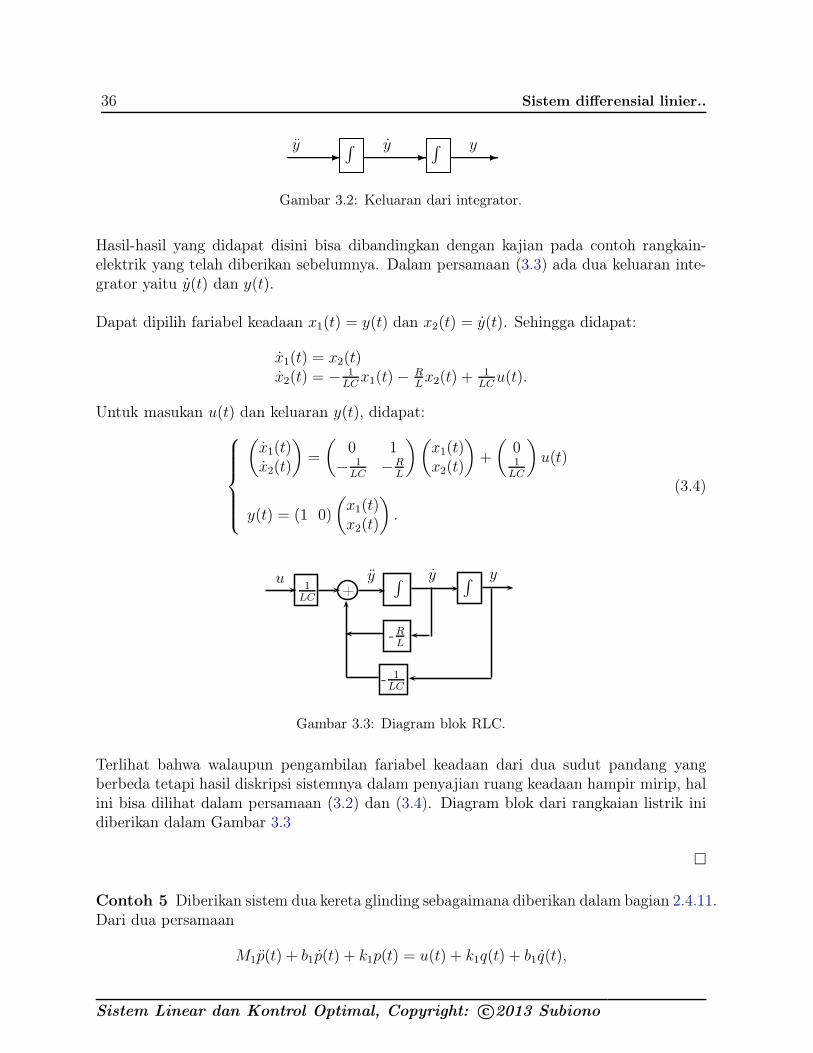
Hasil-hasil yang didapat disini bisa dibandingkan dengan kajian pada contoh rangkain-elektrik yang telah diberikan sebelumnya. Dalam persamaan (3.3) ada dua keluaran inte-grator yaitu y(t) dan y(t).
Dapat dipilih fariabel keadaan x1(t) = y(t) dan x2(t) = y(t). Sehingga didapat:
x1(t) = x2(t)x2(t) = − 1
LCx1(t)− R
Lx2(t) +
1LCu(t).
Untuk masukan u(t) dan keluaran y(t), didapat:
(
x1(t)x2(t)
)
=
(
0 1− 1
LC−R
L
)(
x1(t)x2(t)
)
+
(
01
LC
)
u(t)
y(t) = (1 0)
(
x1(t)x2(t)
)
.
(3.4)
1LC
+u ∫ ∫y y y
-RL
- 1LC
Gambar 3.3: Diagram blok RLC.
Terlihat bahwa walaupun pengambilan fariabel keadaan dari dua sudut pandang yangberbeda tetapi hasil diskripsi sistemnya dalam penyajian ruang keadaan hampir mirip, halini bisa dilihat dalam persamaan (3.2) dan (3.4). Diagram blok dari rangkaian listrik inidiberikan dalam Gambar 3.3
�
Contoh 5 Diberikan sistem dua kereta glinding sebagaimana diberikan dalam bagian 2.4.11.Dari dua persamaan
M1p(t) + b1p(t) + k1p(t) = u(t) + k1q(t) + b1q(t),
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Uraian dalam dan uraian luar suatu sistem.. 37
danM2q(t) + (k1 + k2)q(t) + (b1 + b2)q(t) = k1p(t) + b1p(t)
sebagai peubah keadaan sistem dipilih keluaran dari integrator, yaitu
x1(t) = p(t), x2(t) = p(t) dan x3(t) = q(t), x4(t) = q(t)
didapat
x1(t) = x2(t)
x2(t) = − k1M1
x1(t)−b1M1
x2(t) +k1M1
x3(t) +b1M1
x4(t) +1
M1u(t)
x3(t) = x4(t)
x4(t) =k1M2
x1(t) +b1M2
x2(t)−k1 + k2M2
x3(t)−b1 + b2M2
x4(t) .
Dengan demikian bentuk ruang keadaan sistem adalah
x(t) =
0 1 0 0− k1
M1− b1
M1
k1M1
b1M1
0 0 0 1k1M2
+ b1M2
−k1+k2M2
− b1+b2M2
x(t) +
01M1
00
u(t).
�
Diagram blok dari suatu sistem dilihat dari pengertian uraian "dalam" diberikan olehGambar 3.4. Tampak bahwa dalam Gambar 3.4, keluaran y(t) tidak hanya secara langsungdipengaruhi oleh masukan u(t), tetapi juga dipengaruhi oleh keadaan "dalam" sistem itusendiri yaitu x(t), dimana keadan x(t) ini sendiri didalamnya sistem terhadap perubahanwaktu t mengalami suatu perubahan dengan laju perubahan diberiakan oleh persamaanx(t) = f(x(t), u(t), t), dimana tanda x = dx(t)
dt.
❄
✲ ✲
x0
u(t) y(t)x(t) = f(x(t), u(t), t)y(t) = g(x(t), u(t), t)
Gambar 3.4: Uraian "dalam" suatu sistem.
Walaupun dalam sistem tidak ada masukan yaitu u(t) = 0, keadaan di dalam sistem inimengalami perubahan keadaan yang diberikan oleh persamaan x(t) = f(x(t), t). Sehinggawalaupun tanpa masukan, keluaran sistem y(t) = g(x(t), t) tetap dipengaruhi oleh suatukeadaan di dalam sistem yaitu x(t). Tanpa menyelesaikan persamaan keadaan x(t) =
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

38 Sistem differensial linier..
H(.)✲ ✲Y (.)U(.)
Gambar 3.5: Uraian "luar" suatu sistem.
f(x(t), t), tidak mungkin bisa didapat keluaran y(t) = g(x(t), t).
Berbeda dengan uraian "dalam" dari suatu sistem, uraian "luar" suatu sistem menguraikanhubungan langsung antara masukan dan keluaran tanpa apa yang ada di "dalam" sistemsebagaimana mana diberikan dalam Gambar 3.5. Sehingga hubungan diantara masukandan keluaran dari sistem bisa ditulis sebagai persamaan Y (.) = H(.)U(.). Terlihat bahwakeluaran U(.) langsung mempengaruhi keluaran Y (.) melalui "pengali" H(.). Uraian luarini sangat erat kaitannya dengan apa yang dinamakan fungsi transfer sistem. Pengertianfungsi transfer ini akan dibahas lebih rinci dalam Bab 6.
3.2 Pelinearan
Pada bagian ini utamanya akan dikonsentrasikan pada sistem persamaan differensial linier.{
x(t) = A(t)x(t) +B(t)u(t)y(t) = C(t)x(t) +D(t)u(t).
(3.5)
Ada dua alasan penting untuk sistem persamaan linier. Yang pertama adalah secara anal-itik menarik. Sistem ini bisa dianalisa lebih baik daripada sistem non linier. Hal inikhususnya benar bila sistem matriks (3.5) konstan terhadap waktu. Penyelesaian dalamhal ini diungkapkan didalam suatu kondisi awal dan fungsi masukan yang bisa dituliskankemudian. Alasan kedua adalah banyak sistem berbentuk linier atau setidaknya didekatioleh sistem linier. Bahkan sistem nonlinier mungkin dilinierkan secara lokal, yaitu su-atu penyelesaian disekitar pertubasi kecil akan mempunyai perilaku seperti sistem linier.Disini akan diasumsikan bahwa, persamaan (3.5) terdefinisi dengan baik untuk setiap kon-disi awal, misalnya x(0) dan masukan u(t), t ≥ 0 pada penyelesaian (3.5). Kondisi awaldan fungsi masukan yang demikian dinamakan dapat-diterima (admissible). Dalam hal inisemua elemen matriks dan masukan kontinu bagian demi bagian. Secara umum diasum-sikan bahwa semua himpunan-himpunan U, U, Y, Y ,X dan X ada dengan u(t) ∈ U untuksetiap t, u(.) ∈ U, y(t) ∈ Y untuk setiap t, y(.) ∈ Y , x(t) ∈ X untuk setiap t dan x(.) ∈ Xsedemikian hingga penyelesaian (3.5) ada. Untuk peyederhanaan penyajian kesemuanyayang telah dikenalkan tidak selamanya secara langsung ditampilkan. Bila matrik-matriksA,B,C dan D konstan yaitu tidak tergantung t, maka dikatakan sistem adalah invarian-waktu.
Berikut ini diturunkan konsep pelinearan secara lebih tepat. Tinjau suatu persamaandifferensial non-linier diberikan oleh
x = f(x, u), x ∈ Rn, u ∈ R
m
y = g(x, u), y ∈ Rp.
}
(3.6)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pelinearan.. 39
Diberikan suatu penyelesaian x(.), y(.) dan bila diberikan keadaan awal x(0) = x0 danmasukan u(.). Tinjau penyelesaian yang lain x(.) + z(.), y(.) + w(.) yang merupakan hasildari x0 + z0 dan u(.) + v(.). Dalam beberapa makna z0 dan v(.) cukup kecil sedemikianhingga diharapkan z(.) dan w(.) juga kecil, dalam hal ini diperoleh
ddtx(t) = f(x, u), x(0) = x0
ddt(x(t) + z(t)) = f(x+ z, u+ v), (x+ z)(0) = x0 + z0.
Namakan x+ z = x dan u+ v = u. Jadi f(x+ z, u+ v) = f(x, u), selanjutnya digunakanderet Taylor untuk f(x, u) disekitar x = x dan u = u, didapat
f(x, u) = f(x, u) +∂f
∂xz +
∂f
∂uv + suku tingkat dua keatas.
Tetapi ddt(x(t) + z(t)) = f(x, u) dan d
dt(x(t) + z(t)) = d
dtx+ d
dtz(t). Jadi
d
dtx+
d
dtz(t) = f(x, u) +
∂f
∂xz +
∂f
∂uv + suku tingkat dua keatas.
Dengan kenyataan z0 dan v(.) cukup kecil, maka suku-suku tingkat dua keatas dapatdiabaikan, sehingga diperoleh
d
dtz(t) =
∂f
∂xz +
∂f
∂uv, z(0) = z0
atau dalam bentuk matriks
dz1dtdz2dt...dzndt
=
∂f1∂x1
. . .∂f1∂xn
∂f2∂x1
. . .∂f2∂xn
......
∂fn∂x1
. . .∂fn∂xn
z1z2.........zn
+
∂f1∂u1
. . .∂f1∂um
∂f2∂u1
. . .∂f2∂um
......
∂fn∂u1
. . .∂fn∂um
v1v2.........vm
Persamaand
dtz(t) =
∂f
∂xz +
∂f
∂uv, z(0) = z0
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

40 Sistem differensial linier..
adalah persamaan differensial keadaan hasil pelinearan disekitar titik (x, u). Dengan carayang sama pelinearan untuk keluaran disekitar titik (x, u) adalah:
w(t) =∂g
∂xz(t) +
∂g
∂uv(t)
yang dapat ditulis dalam bentuk matriks
w1
w2.........wp
=
∂g1∂x1
. . .∂g1∂xn
∂g2∂x1
. . .∂g2∂xn
......
∂gp∂x1
. . .∂gp∂xn
z1z2.........zn
+
∂g1∂u1
. . .∂g1∂um
∂g2∂u1
. . .∂g2∂um
......
∂gp∂u1
. . .∂gp∂um
v1v2.........vm
Jika variabel z, v dan w masing-masing diganti dengan x, u dan y, tetapi dalam hal initentunya berbeda dengan x, u dan y yang sebelumnya (asli), sehingga didapat:
x(t) = A(t)x(t) +B(t)u(t)y(t) = C(t)x(t) +D(t)u(t),
dengan
A(t) =
∂f1∂x1
. . .∂f1∂xn
∂f2∂x1
. . .∂f2∂xn
......
∂fn∂x1
. . .∂fn∂xn
|x=x,u=u
,
B(t) =
∂f1∂u1
. . .∂f1∂um
∂f2∂u1
. . .∂f2∂um
......
∂fn∂u1
. . .∂fn∂um
|x=x,u=u
,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pelinearan.. 41
C(t) =
∂g1∂x1
. . .∂g1∂xn
∂g2∂x1
. . .∂g2∂xn
......
∂gp∂x1
. . .∂gp∂xn
|x=x,u=u
,
dan
D(t) =
∂g1∂u1
. . .∂g1∂um
∂g2∂u1
. . .∂g2∂um
......
∂gp∂u1
. . .∂gp∂um
|x=x,u=u
.
Hasil pelinearan sistem non linier adalah:
x(t) = A(t)x(t) +B(t)u(t)y(t) = C(t)x(t) +D(t)u(t),
yaitu sistem linier tetapi umumnya varian-waktu.
Contoh 6 Diberikan sistem:x1 = −x21x2 = ux1y = x22, t ≥ 0
Pelinearan disekitar penyelesaian x1(t) =1
1 + t, x2(t) = ln(1 + t) dan u(t) = 1 adalah:
d
dt(
1
1 + t+ z1) = −(
1
1 + t+ z1)
2 = −(1
1 + t)2 − 2
1 + tz1 − z21 ,
didapat: z1 = − 2
1 + tz1 adalah persamaan pertama yang terlinierkan, selanjutnya
d
dt(ln(1 + t) + z2) = (1 + v)(
1
1 + t+ z1) =
1
1 + t+ z1 +
1
1 + tv + z1v,
didapat: z2(t) = z1 +1
1 + tv adalah persamaan kedua yang terlinierkan. Juga untuk
keluaran:
y(t) + w = (ln(1 + t))2 + w
= (ln(1 + t) + z2)2
= (ln(1 + t))2 + 2z2 ln(1 + t) + z22 ,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

42 Sistem differensial linier..
didapat: w(t) = 2z2 ln(1 + t) adalah persamaan keluran yang terlinierkan. Penggabunganhasil-hasil pelinearan didapat:
z1
z2
=
− 2
1 + t0
1 0
z1
z2
+
0
1
1 + t
v
w =(
0 2 ln(1 + t))
(
z1z2
)
�
Contoh 7 Diinginkan mengontrol suatu batang dengan gaya horizontal (lihat gambar).Panjang batang 1 satuan panjang.
✲
u
...
...❄
mg
θ
Sudut θ memenuhi persamaan (hukum Newton): θ = g sin θ − u cos θ. Diasumsikanbatang hanya bergerak pada bidang vertikal. Pertama diturunkan suatu formula pelinearansistem sepanjang penyelesaian umum. Misalkan (x, u) suatu trayektori tetap sebarang dan:
θ = x1θ = x2 = x1.
Didapat:(
x1(t)x2(t)
)
=
(
x2g sin x1 − u cosx1
)
= f(x, u),
x(t) =
(
x1(t)x2(t)
)
dan
A(t) =∂f
∂x |(x, v) =(
0 1g cosα + v sinα 0
)
,
dengan x = (α, β)T ,
B(t) =∂f
∂u |(x, v) =(
0− cosx1
)
|(x, v)=
(
0− cosα
)
.
Jadi pelinearan sistem sepajang trayektori umum adalah:(
x1(t)x2(t)
)
=
(
0 1g cosα + v sinα 0
)(
x1(t)x2(t)
)
+
(
0− cosα
)
u.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pelinearan.. 43
Selanjutnya, bila ditinjau sistem yang sama tetapi sekarang didalam bidang horizontal(tidak dipengaruhi grafitasi), didapat model: θ = −u cos θ. Dilinierkan model disekitarpenyelesaian setimbang θ = 0 dan u = 0. Untuk ini misalkan
θ = x1θ = x2 = x1.
Didapat:(
x1(t)x2(t)
)
=
(
x2−u cosx1
)
= f(x, u),
x(t) =
(
x1(t)x2(t)
)
dan
A(t) =∂f
∂x∣
∣
∣
∣
∣
∣
∣
∣
∣
x1 = 0x2 = 0u = 0
=
(
0 1u sin x1 0
)
∣
∣
∣
∣
∣
∣
∣
∣
∣
x1 = 0x2 = 0u = 0
=
(
0 10 0
)
B(t) =∂f
∂u∣
∣
∣
∣
∣
∣
∣
∣
∣
x1 = 0x2 = 0u = 0
=
(
0− cosx1
)
∣
∣
∣
∣
∣
∣
∣
∣
∣
x1 = 0x2 = 0u = 0
=
(
0−1
)
.
Jadi pelinearan sistem disekitar penyelasaian setimbang adalah:(
x1(t)x2(t)
)
=
(
0 10 0
)(
x1(t)x2(t)
)
+
(
0−1
)
u.
�
Contoh 8 Ditinjau lagi contoh pendulum-terbalik yang diberikan dalam bagian 2.4.1 danditulis ulang persamaan (2.5) yaitu:
4l3φ− g sin φ+ s cosφ = 0
(M +m)s+ml(φ cosφ− φ2 sin φ) = u,(3.7)
Persamaan sistem (3.7) bisa ditulis dalam empat persamaan differensial tingkat satu den-gan vektor "keadaan" difinisikan sebagai
x(t) = (φ(t) φ(t) s(t) s(t))′.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

44 Sistem differensial linier..
Selanjutnya dilinierkan persamaan (3.7) setelah itu dikonstruksi sekumpulan persamaandifferensial. Linearkan (3.7) disekitar penyelesaian
φ(t) = ˙φ(t) = s(t) = ˙s(t) = 0 dan v = 0
memberikan hasil4l
3φ(t)− gφ(t) + s(t) = 0, (M +m)s(t) +mlφ(t) = u(t), (3.8)
Dengan mendifinisikan vektor keadaan
x(t) = (φ(t) φ(t) s(t) s(t))′
persamaan (3.8) bisa ditulis sebagai
dx(t)
dt=
0 1 0 0a2,1 0 0 00 0 0 1a4,1 0 0 0
x(t) +
0b20b4
u(t), (3.9)
dengan
a2,1 =3g(M +m)
l(4M +m), a4,1 =
−3gm
4M +m
danb2 =
−3
l(4M +m), b4 =
4
4M +m.
Bila diberikan M = 0.98 kg, m = 0.08 kg, l = 0.312 m dan g = 10 m/det2, makapersamaan (3.9) menjadi
dx(t)
dt=
0 1 0 025 0 0 00 0 0 1
−0.6 0 0 0
x(t) +
0−2.401
u(t). (3.10)
Bila besaran yang diukur adalah s(t) dan φ(t), maka fungsi keluarannya adalah:
y(t) =
(
0 0 1 01 0 0 0
)
x(t). (3.11)
Latihan 12 Diberikan persamaan differensial:
x1(t) = x2(t)
x2(t) = −x1(t)− x22(t) + u(t)
dan fungsi keluaran y(t) = x1(t). Tunjukkan bahwa untuk u(t) = cos2(t) suatu penyelesaiandari persamaan differensial adalah x1(t) = sin(t), x2(t) = cos(t). Linearkan persamaankeadaan dan fungsi keluaran disekitar penyelesaian tsb. dan tulis hasilnya dalam bentukmatriks. Apakah hasil pelinearan merupakan sistem yang invarian-waktu?
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 45
Latihan 13 Linearkan sistem berikut:
x1(t) = x1(t)− x21(t)− x1(t)x2(t)
x2(t) = 2x2(t)− x1(t)x2(t)−1
2x22(t)
disekitar penyelesaian x1(t) = 0, x2(t) = 0. Selesaikan hasil pelinearan tsb. bila x1(0) =1, x2(0) = 3.
�
3.3 Penyelesaian persamaan differensial linier
Dalam bagian ini ditinjau persamaan differensial varian-waktu berbentuk
x(t) = A(t)x(t) +B(t)u(t) (3.12)
dan persamaan differensial invarian-waktu:
x(t) = Ax(t) +Bu(t), (3.13)
dengan matriks-matriks A,B dan x, u masing-masing dengan ukuran yang bersesuaian.Selanjutnya dikaji penyelesaiannya. Sebelum membahas penyelesaian persamaan yangdimaksud. Ditinjau ulang suatu persamaan differensial biasa homogin dalam bentuk skalaryaitu :
x(t) = ax(t), (3.14)
dengan x(t) adalah fungsi kontinu di R (R adalah himpunan bilangan real) dan a ∈ R, a 6=0. Sebagaimana telah diketahui, persamaan (3.14) ini mempunyai penyelesaian umumx(t) = ceat, dengan c suatu konstanta di R. Bila persamaan (3.14) diubah dalam bentukpersamaan matriks
x(t) = Ax(t), (3.15)
dengan A matriks berukuran n×n dan x(t) berukuran n×1, maka penyelesaian persamaan(3.15) mempunyai penyelesaian yang mirip bentuknya dengan penyelesaian persamaan(3.14) yaitu x(t) = eAtx(t0). Hal ini akan ditunjukkan pada pembahasan berikutnya.Namum sebelumnya dibahas dulu bentuk persamaan differensial homogen berikut
x(t) = A(t)x(t). (3.16)
Sifat dari penyelesaian persamaan (3.16) diberikan dalam teorema berikut:
Teorema 1 Himpunan dari semua penyelesaian x(t) = A(t)x(t) membentuk ruang vektorberdimesi-n atas lapangan R.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

46 Sistem differensial linier..
Bukti :Misalkan ψ1 dan ψ2 dua penyelesaian sebarang dari (3.16), maka untuk sebarang a, b ∈ R
didapat :d
dt(aψ1 + bψ2) = a
d
dtψ1 + b
d
dtψ2 = aA(t)ψ1 + bA(t)ψ2
= A(t)(aψ1 + bψ2).
Terlihat bahwa penyelesaian-penyelesaiannya membentuk suatu ruang linear atas R yangdinamakan ruang penyelesaian dari (3.16). Selanjutnya ditunjukkan bahwa ruang penye-lesaian ini mempunyai dimensi n. Misalkan e1, e2, . . . , en adalah basis baku di Rn danψ1, ψ2, . . . , ψn adalah penyelesaian dari (3.16) dengan kondisi awal ψi(t0) = ei, i = 1, 2, . . . , n.Akan ditunjukkan bahwa ψi, i = 1, 2, . . . , n adalah bebas linear. Andaikan bahwa ψi, i =1, 2, . . . , n bergantungan linear, maka pilih vektor α 6= 0 yang memenuhi :
[
ψ1(t) ψ2(t) . . . ψn(t)]
α = 0, ∀t ∈ R. (3.17)
Bilaα =
[
a1 a2 . . . an]T,
tanda T menyatakan tranpose, maka persamaan (3.17) bisa ditulis sebagai
a1ψ1(t) + a2ψ2(t) + . . .+ anψn(t) = 0, ∀t ∈ R. (3.18)
Khususnya dalam (3.18) bisa diambil t = t0, sehingga didapat
a1ψ1(t0) + a2ψ2(t0) + . . .+ anψn(t0) = 0,
ataua1e1 + a2e2 + . . .+ anen = 0,
dengan fakta bahwa vektor α 6= 0, maka ai 6= 0 untuk beberapa i. Hal ini berakibat bahwavektor-vektor ei, e2, . . . , en adalah bergantungan linear. Hasil ini menunjukkan bahwa ber-tentangan dengan kenyataan vektor-vektor ei, e2, . . . , en adalah bebas linear. Jadi haruslahbahwa vektor-vektor penyelesaian dari (3.16) ψ1, ψ2 . . . , ψn adalah bebas linear. Selanjut-nya ditunjukkan bahwa sebarang penyelesaian dari (3.16) merupakan kombinasi linear darivektor-vektor ψ1, ψ2 . . . , ψn. Misalkan ψ(t) adalah sebarang penyelesaian dari (3.16) de-ngan ψ(t0) = e. Didapat ψ(t0) = e = b1e1 + b2e2 + . . .+ bnen, bi ∈ R dan
ddt(b1ψ1(t) + b2ψ2(t) + . . .+ bnψn(t))
= b1ddtψ1(t) + b2
ddtψ2(t) + . . .+ bn
ddtψn(t)
= b1A(t)ψ1(t) + b2A(t)ψ2(t) + . . .+ bnA(t)ψn(t)= A(t) (b1ψ1(t) + b2ψ2(t) + . . .+ bnψn(t)) .
Terlihat bahwa vektor b1ψ1(t)+b2ψ2(t)+ . . .+bnψn(t) adalah penyelesaian dari (3.16) yangmemenuhi kondisi awal
b1ψ1(t0) + b2ψ2(t0) + . . .+ bnψn(t0)= b1e1 + b2e2 + . . .+ bnen= e = ψ(t0).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 47
Sebagaimana telah diketahui dari teori persamaan diiferensial bahwa penyelesaian iniadalah tunggal, maka haruslah
ψ(t) = b1ψ1(t) + b2ψ2(t) + . . .+ bnψn(t).
�
Telah ditinjukkan dalam Teorema 1 bahwa persamaan (3.16) mempunyai n penyelesaianψ1(t), ψ2(t), . . . , ψn(t) yang bebas linear. Matriks berikut ini adalah matriks yang kolom-kolomnya merupakan penyelesaian dari (3.16), yaitu
Y (t) =[
ψ1(t) ψ2(t) . . . ψn(t)]
dinamakan matriks fundamental. Karena ψ1(t), ψ2(t), . . . , ψn(t) bebas linear untuk setiapt ∈ R, maka matriks Y (t) mempunyai invers, sehingga Y −1(s) ada untuk suatu s ∈ R.Matriks berikut ini Φ(t, s) = Y (t)Y −1(s) disebut matriks transisi dan dari hasil Teorema 1dapat ditunjukkan merupakan penyelesaian tunggal dari persamaan differensial matriks
d
dtΦ(t, s) = A(t)Φ(t, s), t ≥ s, Φ(s, s) = I, (3.19)
dengan I adalah matriks satuan, sebagai berikut.
d
dtΦ(t, s) =
d
dt(Y (t))Y −1(s)
= (A(t)Y (t))Y −1(s)
= A(t)(Y (t)Y −1(s))
= A(t)Φ(t, s)
dan memenuhi kondisiΦ(s, s) = Y (s)Y −1(s) = I.
Kolom ke-i dari matriks Φ(t, s) adalah penyelesaian tunggal dari x(t) = A(t)x(t) dengankondisi awal x(s) = ei, dengan ei vektor basis baku (standart) ke-i di Rn. Penyelesaiandari x(t) = A(t)x(t), x(t0) = x0 bisa diungkapkan sebagai x(t) = Φ(t, t0)x0. Hal ini bisaditunjukkan sebagai berikut :
x(t) =d
dtx(t)
=d
dtΦ(t, t0)x0
=d
dtΦ(t, t0)x0 = A(t)Φ(t, t0)x0, (dari (3.19))
= A(t)x(t).
Terlihat bahwa x(t) = Φ(t, t0)x0 adalah penyelesaian dari persamaan x(t) = A(t)x(t) yangmemenuhi syarat kondisi awal x(t0) = Φ(t0, t0)x0 = Ix0 = x0.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

48 Sistem differensial linier..
Sudah ditunjukkan bahwa matriks transisi memainkan suatu peranan penting dalampenyelesaian persamaan differensial homogin x(t) = A(t)x(t). Pada pembahasan berikut-nya juga terlihat peranannya dalam peyelesaian persamaan differensial takhomogin x(t) =A(t)x(t) +B(t)u(t). Berikut ini diturunkan sifat-sifat matriks transisi :
1. Φ(t2, t0) = Φ(t2, t1)Φ(t1, t0), untuk semua t0, t1, t2 ∈ R,
2. Φ−1(t, s) = Φ(s, t), untuk semua s, t ∈ R,
sifat-sifat ini bisa ditunjukkan sebagai berikut :
1. Φ(t2, t0) = Y (t2)Y−1(t0)
= (Y (t2)Y−1(t1))(Y (t1)Y
−1(t0))= Φ(t2, t1)Φ(t1, t0)
2. Φ(s, t)Φ(t, s) = (Y (s)Y −1(t))(Y (t)Y −1(s))= Y (s)(Y −1(t)Y (t))Y −1(s)= Y (s)Y −1(s)= I,
juga didapat : Φ(t, s)Φ(s, t) = I ⇔ Φ−1(t, s) = Φ(s, t).
Sifat-sifat diatas memenuhi apa yang dinamakan group. Sifat yang pertama dinamakansifat tertutup dan yang kedua adalah sifat adanya invers, sifat elemen netral adalahφ(t, t) = I. Sifat assosiatif mengikuti sifat assosiatif dari perkalian matriks.
Contoh 9 Diberikan persamaan :
x(t) =
[
0 0t 0
]
x(t)
Persamaan ini bisa ditulis dalam bentuk dua persamaan :
x1(t) = 0 dan x2(t) = tx1(t)
Penyelesaian persamaan ini diberikan oleh x1(t) = x1(t0) dan x2(t) = 12t2x1(t0) + x2(t0).
Untuk x1(t0) = 1, x2(t0) = 0, didapat ψ1(t) =[
1 12t2]T
dan untuk x1(t0) = 0, x2(t0) =
1, didapat ψ2(t) =[
0 1]T
. Jadi matriks fundamentalnya adalah :
Y (t) =[
Ψ1(t) Ψ2(t)]
=
[
1 012t2 1
]
.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 49
Contoh 10 Tinjau persamaan varian waktu:
d
dt
x1(t)
x2(t)
=
0 1
− 2
t22
t
x1(t)
x2(t)
+
0
1
t2
u(t), t > 0,
yang mana ekivalen dengan persamaan differensial tingkat dua (x1(t) = y(t)):
t2y(t)− 2ty(t) + 2y(t) = u(t).
Pertama tinjau persamaan homogen (yaitu u(t) = 0) dan substisusikan suatu penyelesaianyang mungkin berbentuk y(t) = tk, didapat:
k2 − 3k + 2 = 0 → k = 1, k = 2
Maka dari itu y(t) = t dan y(t) = t2 adalah dua penyelesaian yang bebas dan (t, 1)T dan(t2, 2t)T adalah dua penyelesaian bebas dari:
x(t) =
0 1
− 2
t22
t
x(t).
Masing-masing matriks fundamental dan matriks transisi diberikan oleh:
Y (t) =
(
t t2
1 2t
)
, Φ(t, s) =
2t
s− t2
s2−t + t2
s
2
s− 2t
s2−1 +
2t
s
�
Teorema berikut menjelaskan penyelesaian persamaan differensial takhogin yang diberikandalam persamaan (3.12).
Teorema 2 Penyelesaian dari persamaan
x(t) = A(t)x(t) +B(t)u(t)
dengan kondisi awal x(t0) = x0 adalah
x(t) = Φ(t, t0)x0 +
t∫
t0
Φ(t, s)B(s)u(s)ds
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

50 Sistem differensial linier..
Bukti :
x(t) =d
dtΦ(t, t0)x0 +
d
dt
t∫
t0
Φ(t, s)B(s)u(s)ds
= A(t)Φ(t, t0)x0 + Φ(t, s)B(s)u(s)|s=t
+t∫
t0
d
dtΦ(t, s)B(s)u(s)ds
= A(t)
(
Φ(t, t0)x0 +t∫
t0
Φ(t, s)B(s)u(s)ds
)
+B(t)u(t)
= A(t)x(t) +B(t)u(t).
Selajutnya pembahasan dibatasi untuk bentuk yang disajikan dalam persamaan (3.13).Untuk sistem yang demikian matriks transisi juga ada, untuk maksud ini perluh definisimatriks berikut
eAt def= I + At+
1
2!A2t2 +
1
3!A3t3 + . . . (3.20)
definisi diatas terdefinisi dengan baik sebab deret konvergen, hal ini dijamin oleh TeoremaCayley Hamilton yang berkaitan dengan matriks persegi yaitu, bila matriks persegi Aberukuran n× n dengan polinomial kharakteristik
p(λ) = λn + a1λn−1 + . . .+ an−1λ+ an,
makap(A) = An + a1A
n−1 + . . .+ an−1A+ anI = 0. (3.21)
Selanjutnya lakukan algorithma pembagian terhadap polinomial λm dibagi oleh polinomialp(λ) = λn + a1λ
n−1 + . . .+ an−1λ+ an, didapat
λm = p(λ)q(λ) + r(λ)
atauλm = p(λ)q(λ) + α1 + α2λ+ . . .+ αn−1λ
n−1 (3.22)
Dengan menggunakan Persamaan (3.22) matriks Am diberikan oleh
Am = p(A)q(A) + α1I + α2A+ . . .+ αn−1An−1
Gunakan Persamaan (3.21), didapat
Am = α1I + α2A + . . .+ αn−1An−1 (3.23)
Persamaan (3.23) menunjukkan bahwa, secara berulang bentuk pangkat Am dengan m ≧ ndapat ditulis sebagai:
Am = α1I + α2A+ . . .+ αn−1An−1. (3.24)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 51
Sehingga berapapun besarnya m, maka Am bisa disajikan dalam persamaan (3.23), olehkarena itu persamaan (3.20) menjadi
eAt = b0 I + b1 (At) + b2 (At)2 + · · ·+ bn−1 (At)
n−1
= b0 I + (b1t)A+ (b2t2)A2 + · · ·+ (bn−1t
n−1)An−1
ataueAt = c0 I + c1A+ c2A
2 + · · ·+ cn−1An−1. (3.25)
Cara untuk menentukan nilai-nilai c0, c1, . . . , cn−1 akan dibahas kemudian. Dengan mem-perhatikan persamaan (3.25), maka eAt adalah matriks berukuran n× n.Catatan : Notasi berikut eA(t−s) yang juga didefinisikan seperti (3.20), yaitu
eA(t−s) = I + A(t − s) +1
2!A2(t − s)2 +
1
3!A3(t − s)3 + . . .. Disini notasi A(t − s) berarti
perkalian dari A dengan (t− s). Perhatikan jangan sampai kacau dengan notasi A(t) yangdigunakan sebelumnya yaitu berarti bahwa matriks A berisi elemen-elemen fungsi dariwaktu t.
Teorema berikut menjelaskan hubungan matriks transisi dari persamaan x(t) = Ax(t)dengan matriks eksponen eAt.
Teorema 3 Matriks eA(t−s) adalah matriks transisi dari persamaan x(t) = Ax(t), yaitueA(t−s) = Φ(t, s).
Bukti Pembuktian menggunakan substitusi:
d
dteA(t−s) =
d
dt
(
I +A(t− s) +1
2!A2(t− s)2 +
1
3!A3(t− s)3 + · · ·
)
= A+A2(t− s) +1
2!A3(t− s)2 + · · ·
= A
(
I +A(t− s) +1
2!A2(t− s)2 + · · ·
)
= AeA(t−s),
jadid
dtΦ(t, s) = AΦ(t, s)
danΦ(s, s) = eA(s−s) = I + A.0 +
1
2!A2.0 + · · · = I.
�
Pada pembahasan berikutnya untuk menyingkat penulisan, x(t) cukup ditulis x dalam kon-teks yang jelas bahwa vektor-vektor x dengan komponen-komponennya merupakan fungsidari t. Penyelesaian dari x = Ax dengan x(0) = x0 adalah x(t) = eAtx0. Penyelesaian inijuga bisa diperoleh melalui diagram berikut yang menyajikan persamaan differensial:
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

52 Sistem differensial linier..
✲
❄
✲∫
Ax(t)
x0x(t)
Putari diagram terus menerus akan didapat:
x(t) = x0 +
∫ t
0
Ax0dα1 +
∫ t
0
A
∫ α2
0
Ax0dα1dα2
+
∫ t
0
A
∫ α2
0
A
∫ α3
0
Ax0dα1dα2dα3 + · · ·
= (I + At +1
2!A2t2 +
1
3!A3t3 + · · · )x0 = eAtx0
Karena eAt adalah matriks transisi, sifat-sifat berikut dipenuhi:
1. eA(t2−t0) = eA(t2−t1)eA(t1−t0), demikian pula eA(t+s) = eAteAs.
2. (eAt)−1 = e−At.
Matriks exponential eAt memainkan suatu peranan yang penting di dalam teori sistem linierdan sudah banyak paper yang terbit membahas seberapa baik prosedur untuk menghitungeAt. Berikut ini diberikan suatu sifat untuk menghitung eAt secara analitik.
Lemma 1 Bila suatu matriks P punya invers, maka
eAt = Pe(P−1AP )tP−1.
Bukti harus dibuktikan P−1eAtP = e(P−1AP )t.
e(P−1AP )t = I + P−1APt+
1
2!(P−1AP )2t2 +
1
3!(P−1AP )3t3 + · · ·
= I + (P−1AP )t+1
2!(P−1APP−1AP )t2
+1
3!(P−1APP−1APP−1AP )t3 + · · ·
= I + P−1APt+1
2!(P−1A2P )t2 +
1
3!(P−1A3P )t3 + · · ·
= P−1
(
I +At+1
2!A2t2 +
1
3!A3t3 + · · ·
)
P = P−1eAtP.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 53
Misalkan bahwa A dapat didiagonalkan, yaitu ada matriks punya invers T sedemikianhingga T−1AT = D, dengan
D =
λ1 0. . .
0 λn
.
Dalam kenyataannya, {λi} adalah nilai karakteristik dari A dan kolom ke-i dari matriksT adalah vektor karakateristik yang bersesuaian dengan nilai karakteristik λi. Denganmenggunakan Lemma 1 didapat:
eAt = TeT−1ATtT−1 = TeDtT−1.
Matriks exponen eDt mudah didapat dengan menggunakan (3.20):
eDt =
eλ1t 0. . .
0 eλnt
.
Sayangnya tidak semua matriks persegi bisa didiagonalkan. Oleh karena itu metoda yangdiuraikan diatas tidak bisa digunakan untuk sebarang matriks persegi. Diagonalisasi hanyamungkin bila matriks Amempunyai n vektor karakteristik yang saling bebas linier. Kondisicukup (tapi tidak perluh) bahwa A mempunyai n vektor karakteristik yang saling bebaslinier adalah semua nilai karakteristinya berbeda, hal ini akan diberikan dalam sifat-sifatberikut.
Teorema 4 Misalkan matriks A berukuran n× n. Maka A dapat didiagonalkan bila danhanya bila ada suatu himpunan X yang memuat n vektor karakteristik dari A yang bebaslinear.
Bukti (⇐) Misalkan X = {x1,x2,x3, . . . ,xn} adalah himpunan yang memuat n vek-tor karakteristik dari A yang bebas linear dengan nilai karakteristik yang bersesuaianλ1, λ2, λ3, . . . , λn dan didifinisikan
T =[
x1| x2| x3| . . . | xn
]
D =
λ1 0 0 . . . 00 λ2 0 . . . 00 0 λ3 . . . 0...
......
...0 0 0 . . . λn
=[
λ1e1|λ2e2|λ3e3| . . . |λnen]
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

54 Sistem differensial linier..
Kolom-kolom dari T adalah vektor-vektor yang bebas linear, maka T adalah matriks yangnonsingulir. Jadi matriks invers T−1 ada. Sehingga didapat
T−1AT = T−1A[
x1| x2| x3| . . . | xn
]
= T−1[
Ax1| Ax2| Ax3| . . . | Axn
]
= T−1[
λ1x1|λ2x2|λ3x3| . . . |λnxn
]
= T−1[
λ1Te1|λ2Te2|λ3Te3| . . . |λnTen]
= T−1[
T (λ1e1)|T (λ2e2)|T (λ3e3)| . . . |T (λnen)]
= T−1T[
λ1e1|λ2e2|λ3e3| . . . |λnen]
= InD
= D.
(⇒) Sebaliknya, misalkan A dapat didiagonalkan, maka ada matriks nonsingulir berukurann× n
S =[
y1| y2| y3| . . . | yn
]
dan matriks diagonal
E =
d1 0 0 . . . 00 d2 0 . . . 00 0 d3 . . . 0...
......
...0 0 0 . . . dn
=[
d1e1|d2e2|d3e3| . . . |dnen]
yang memenuhi S−1AS = E. Sehingga diperoleh
[
Ay1|Ay2|Ay3| . . . |Ayn
]
= A[
y1|y2|y3| . . . |yn
]
= AS
= InAS
= SS−1AS
= SE
= S[
d1e1|d2e2|d3e3| . . . |dnen]
=[
d1(Se1)|d2(Se2)|d3(Se3)| . . .. . . |dn(Sen)]
=[
d1y1|d2y2|d3y3| . . . |dnyn
]
.
Terlihat bahwa Ayi = diyi, i = 1, 2, 3, . . . , n, jadi yi adalah vektor karakteristik dari Adengan nilai karakteristik di.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 55
Teorema 4 tidak mensyaratkan kondisi dari nilai karakteristik λi, yaitu λi tidak harusberbeda satu dengan yang lainnya. Sepanjang n vektor karakteristik dari matriks Aadalah vektor-vektor yang bebas linear, maka pasti matriks A bisa didiagonalkan. Teoremaberikutnya menjelaskan bagaimana bila λi 6= λj untuk i 6= j.
Teorema 5 Misalkan matriks A berukuran n × n, bila nilai karakteristik dari A adalahλi, i = 1, 2, . . . , n dengan λi 6= λj untuk i 6= j, maka matriks A dapat didiagonalkan.
Bukti Misalkan S = {x1,x2,x3, . . . ,xn} adalah himpunan vektor karakteristik dari A yangbersesuaian dengan nilai karakteristik λ1, λ2, λ3, . . . , λn. Pertama akan ditunjukkan bahwaS adalah himpunan dari vektor-vektor yang bebas linear. Digunakan bukti tidak langsung,yaitu andaikan bahwa S memuat vektor-vektor yang bergantungan linear. Difinisikan him-punan Si = {x1,x2,x3, . . . ,xi} dan k adalah suatu bilangan bulat sedemikian hinggaSk−1 = {x1,x2,x3, . . . ,xk−1} adalah bebas linear sedangkan Sk = {x1,x2,x3, . . . ,xk}bergantungan linear. Pilih skalar a1, a2, a3, . . . , ak dengan aj 6= 0 untuk beberapa j se-hingga berlaku
0 = a1x1 + a2x2 + a3x3 + . . .+ akxk. (3.26)
Maka, didapat
0 = (A− λkIn)0
= (A− λkIn)(a1x1 + a2x2 + a3x3 + . . .+ akxk)
= a1(A− λkIn)x1 + a2(A− λkIn)x2 +
a3(A− λkIn)x3 + . . .+ ak(A− λkIn)xk
= a1(Ax1 − λkx1) + a2(Ax2 − λkx2) +
a3(Ax3 − λkx3) + . . .+ ak(Axk − λkxk)
= a1(λ1x1 − λkx1) + a2(λ2x2 − λkx2) +
a3(λ3x3 − λkx3) + . . .+ ak(λkxk − λkxk)
= a1(λ1 − λk)x1 + a2(λ2 − λk)x2 +
a3(λ3 − λk)x3 + . . .+ ak(λk − λk)xk
= a1(λ1 − λk)x1 + a2(λ2 − λk)x2 + a3(λ3 − λk)x3 + . . .
+ak−1(λk−1 − λk)xk−1.
Karena vektor-vektor x1,x2,x3, . . . ,xk−1 adalah bebas linear, maka didapat
a1(λ1 − λk) = a2(λ2 − λk) = . . . = ak−1(λk−1 − λk) = 0
dan karena λi 6= λj , i 6= j, maka diperoleh
a1 = a2 = a3 = . . . = ak−1 = 0. (3.27)
Oleh karena itu persamaan (3.26) menjadi
0 = 0+ 0+ 0+ . . .+ akxk
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

56 Sistem differensial linier..
atau 0 = akxk. Karena xk 6= 0, maka ak = 0. Hasil ini gabungkan dengan hasil dalampersamaan (3.27), didapat aj = 0 untuk semua j = 1, 2, 3, . . . , k. Hal ini kontradiksi,yaitu bertentangan dengan kenyataan bahwa aj 6= 0 untuk beberapa j. Jadi haruslahS = {x1,x2,x3, . . . ,xn} adalah himpunan vektor-vektor yang bebas linear. Oleh karenaitu, berdasarkan Teorema 4 matriks A dapat didiagonalkan.
�
Berikut ini diberikan contoh-contoh menghitung matriks ekponensial eAt untuk matriks Ayang bisa didiagonalkan.
Contoh 11 Diberikan matriks
A =
1 1 −20 0 20 −1 3
.
Vektor karaktertistik dari matriks A adalah
x1 =
100
, x2 =
021
, x3 =
1−1−1
yang bersesuaian dengan nilai karakteristik λ1 = λ2 = 1 dan λ3 = 2. Bisa dicek bahwavektor-vektor x1,x2 dan x3 adalah bebas linear. Jadi matriks
T = [x1|x2|x3]
=
1 0 10 2 −10 1 −1
adalah nonsingulir, sehingga matriks T−1 ada, yaitu
T−1 =
1 −1 20 1 −10 1 −2
.
Sehingga matriks A dapat didiagonalkan menjadi
D = T−1AT
=
1 −1 20 1 −10 1 −2
1 1 −20 0 20 −1 3
1 0 10 2 −10 1 −1
=
1 0 00 1 00 0 2
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 57
Dalam hal ini, matriks A bisa ditulis sebagai A = TDT−1. Selanjutnya matriks eAt
diberikan oleh
eAt = e(TDT−1)t
= TeDtT−1
=
1 0 10 2 −10 1 −1
et 0 00 et 00 0 e2t
1 −1 20 1 −10 1 −2
=
et e2t − et 2et − 2e2t
0 2et − e2t 2e2t − 2et
0 et − e2t 2e2t − et
.
�
Contoh 12 Diberikan matriks
A =
3 −2 −22 −1 −3−2 2 4
.
Vektor karaktertistik dari matriks A adalah
x1 =
110
, x2 =
01−1
, x3 =
12−2
yang bersesuaian dengan nilai karakteristik λ1 = 1, λ2 = 2 dan λ3 = 3. Bisa dicek bahwavektor-vektor x1,x2 dan x3 adalah bebas linear. Jadi matriks
S = [x1|x2|x3]
=
1 0 11 1 20 −1 −2
adalah nonsingulir, sehingga matriks S−1 ada, yaitu
S−1 =
0 1 1−2 2 11 −1 −1
.
Sehingga matriks A dapat didiagonalkan menjadi
E = S−1AS
=
0 1 1−2 2 11 −1 −1
3 −2 −22 −1 −3−2 2 4
1 0 11 1 20 −1 −2
=
1 0 00 2 00 0 3
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

58 Sistem differensial linier..
Dalam hal ini, matriks A bisa ditulis sebagai A = SES−1. Selanjutnya matriks eAt
diberikan oleh
eAt = e(SES−1)t
= SeEtS−1
=
1 0 11 1 20 −1 −2
et 0 00 e2t 00 0 e3t
0 1 1−2 2 11 −1 −1
=
e3t et − e3t et − e3t
2e3t − 2e2t −2e3t + 2e2t + et −2e3t + e2t + et
2e2t − 2e3t 2e3t − 2e2t 2e3t − e2t
.
�
Teorema 4 dan Teorema 5 memberikan syarat bagaimana suatu matriks persegi bisa didi-agonalkan, hasil teorema ini memudahkan untuk menghitung matriks eksponensial tanpaharus menderetkan matriks eksponensial sebagaimana diberikan dalam Contoh 11 danContoh 12. Telah dijelaskan sebelumnya, bahwa tidak semua matriks persegi berukurann × n bisa didiagonalkan. Hal ini berkaitan dengan banyaknya vektor karakteristik darimatriks persegi ini yang bebas linear, bila banyaknya vektor karakteristik yang bebas linearkurang dari n, maka jelas matriks persegi tsb. tidak bisa didiagonalkan.
Oleh karenanya suatu matriks persegi berukuran n× n tak dapat didiagonalkan mem-punyai k (< n) nilai karakteristik yang akan dinotasikan dengan λi, i = 1, 2, . . . , k. Mul-tisiplisitas aljabar dari λi adalah banyaknya akar rangkap λi dari polinomial karak-teristik det(A − λiIn) dan dinotasikan oleh αA(λi), akar λi mungkin bilangan kompleks.Multisiplisitas geometri dari λi adalah banyaknya vektor karakteristik yang bebas li-near bersesuaian dengan nilai karakteristik λi dan dinotasikan oleh γA(λi). Suatu ruangbagian yang dibangun oleh semua vektor karakteristik yang bebas linear dari nilai karak-teristik λi dinamakan ruang karakteristik dan dinotasikan oleh εA(λi). Jelas bahwaγA(λi) = dim(εA(λi)), dengan dim(εA(λi)) adalah dimensi dari ruang karakteristik εA(λi)dan secara umum berlaku γA(λi) ≤ αA(λi).
Dalam Contoh 11 matriks A dengan nilai karakteristik λ = 1 mempunyai multisiplisitasaljabar 2 dan mulisiplisitas geometrinya juga 2, sedangkan untuk nilai karakteristik λ = 2multisiplisitas aljabarnya 1 dan multisiplisitas geometrinya juga 1. Disini terlihat bahwamasing-masing multisiplisitas aljabar sama dengan multisiplisitas geometrinya. Begitujuga dalam Contoh 12 masing-masing multisiplisitas aljabar dan multisiplisitas geometri-nya sama. Dalam masing-masing Contoh yang telah disebutkan ini sudah diketahui bahwamasing-masing matriks persegi yang diberikan dalam contoh bisa didiagonalkan. Hal inimemberikan suatu isyarat bahwa bila aljabar multisipisitas dan geometri multisiplisitastidak sama maka matriks tidak dapat didiagonalkan. Sifat berikut menjelaskan apa yangtelah dibahas ini.
Teorema 6 Misalkan matriks A berukuran n× n, maka A dapat didiagonalkan bila danhanya bila γA(λ) = αA(λ) untuk setiap nilai karakteristik λ dari A.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 59
Bukti Misalkan A mempunyai nilai karakteristik yang berbeda satu dengan yang lainnyayaitu λ1, λ2, . . . , λk dan misalkan Si = {xi1,xi2, . . . ,xiγA(λi)} himpunan vektor karakteristikyang bebas linear untuk nilai karakteristik dari λi (jelas bahwa vektor-vektor ini adalahsalah satu basis dari εA(λi)) untuk 1 ≤ i ≤ k. Maka
S = S1 ∪ S2 ∪ . . . ∪ Sk
adalah himpunan vektor-vektor karakteristik dari A. Satu vektor karakteristik tidak akanbisa berpasangan dengan dua nilai karakteristik yang berbeda, jadi Si ∩ Sj = ∅, i 6= j,dengan kata lain S merupakan gabungan dari Si yang saling asing untuk 1 ≤ i ≤ k.(⇐) Banyaknya anggota dari himpunan S adalah
|S| =
k∑
i=1
γA(λi)
=
k∑
i=1
αA(λi)
= n.
Selanjutnya dibahas persamaan berikut
0 = a11x11 + a12x12 + . . .+ a1γA(λ1)x1γA(λ1)
+ a21x21 + a22x22 + . . .+ a2γA(λ2)x2γA(λ2)
+ . . .+ ak1xk1 + ak2xk2 + . . .+ akγA(λk)xkγA(λ1),
dan misalkan
y1 = a11x11 + a12x12 + . . .+ a1γA(λ1)x1γA(λ1)
y2 = a21x21 + a22x22 + . . .+ a2γA(λ2)x2γA(λ2)
...
yk = ak1xk1 + ak2xk2 + . . .+ akγA(λk)xkγA(λk).
Sehingga didapat persamaan
0 = y1 + y2 + . . .+ yk. (3.28)
Selanjutnya ditunjukkan bahwa yi = 0 untuk i = 1, 2, . . . , k. Jelas bahwa yi ∈ εA(λi), i =1, 2, . . . , k. Jadi kemungkinannya adalah yi adalah vektor karakteristik yang sesuai de-ngan nilai karakteristik λi (yi 6= 0) atau yi = 0. Bila masing-masing yi adalah vektorkarakteristik yang sesuai dengan nilai karakteristik λi dan karena λi 6= λj, i 6= j, makay1,y1, . . . ,yk adalah bebas linear. Hal ini tidaklah mungkin dengan melihat kenyataanpersamaan (3.28). Jadi haruslah semua yi = 0, i = 1, 2, . . . , k. Sehingga didapat
0 = a11x11 + a12x12 + . . .+ a1γA(λ1)x1γA(λ1)
0 = a21x21 + a22x22 + . . .+ a2γA(λ2)x2γA(λ2)
...
0 = ak1xk1 + ak2xk2 + . . .+ akγA(λk)xkγA(λk).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

60 Sistem differensial linier..
Karena masing-masing xi1,xi2, . . . ,xiγA(λi) adalah basis dari ruang karakteristik εA(λi) un-
tuk i = 1, 2, . . . , k, maka haruslah aij = 0 untuk i = 1, 2, . . . , k dan j = 1, 2, . . . ,k∑
l=1
γA(λl) =
n. Jadi himpunan S merupakan himpunan vektor-vektor yang bebas linear. Maka dari itumengingat hasil dari Teorema 4 matriks A dapat didiagonalkan.(⇒) Misalkan bahwa A dapat didiagonalkan dan andaikan ada λt sehingga γA(λt) 6= αA(λt),maka γA(λt) < αA(λt) dan γA(λi) ≤ αA(λi) untuk 1 ≤ i ≤ k dengan i 6= t. Karena A da-pat didiagonalkan, maka Teorema 4 menjamin ada suatu himpunan S dari n vektor bebaslinear yang merupakan vektor-vektor karakteristik dari A. Misalkan ni adalah banyaknyavektor karakteristik di S yang bersesuaian dengan nilai karakteristik λi dan ingat bahwasuatu vektor tidak akan merupakan suatu vektor karakteristik untuk dua nilai karakteristikyang berbeda. Himpunan S adalah himpunan dari n vektor yang bebas linear dan, jadiSi adalah himpunan bagian dari S terdiri dari ni vektor yang juga bebas linear. Karenaruang karakteristik εA(λi) berdimensi γA(λi) dan Si adalah himpunan bagian dari εA(λi)yang memuat ni vektor bebas linear, maka ni ≤ γA(λi) untuk 1 ≤ i ≤ k. Sehingga didapat
n = n1 + n2 + . . .+ nt + . . .+ nk
≤ γA(λ1) + γA(λ2) + . . .+ γA(λt) + . . .+ γA(λk)
< αA(λ1) + αA(λ2) + . . .+ αA(λt) + . . .+ αA(λk) = n.
Terlihat bahwa terjadi suatu kontradiksi (tidak mungkin n < n). Jadi haruslah γA(λ) =αA(λ) untuk semua nilai karakteristik λ dari matriks A.
�
Berikut ini diberikan suatu contoh dari matriks yang tidak bisa didiagonalkan.
Contoh 13 Diberikan matriks persegi
A =
1 −1 −2−2 −2 −61 2 5
.
Polinomial karakteristik dari A adalah pA(λ) = |A−λI3| = −λ3+4λ2−5λ+2 = (1−λ)2(2−λ). Sehingga didapat multisiplisitas aljabar dari λ = 1 adalah αA(1) = 2 dan multiplisitasaljabar dari λ = 2 adalah αA(2) = 1. Untuk memperoleh multisiplitas geometri dari λ = 1bisa ditentukan lewat dimensi dari ruang εA(1) = ker(A− I3). Matriks (A− I3) adalah
A− I3 =
1 −1 −2−2 −2 −61 2 5
−
1 0 00 1 00 0 1
=
0 −1 −2−2 −3 −61 2 4
.
Sehingga diperoleh
ker(A− I3) =
a
02−1
∣
∣
∣
∣
∣
∣
a ∈ R
,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 61
terlihat bahwa dim(ker(A − I)) = 1 atau dim(εA(1)) = 1 oleh karena itu γA(1) = 1. JadiγA(1) = 1 < 2 = αA(1), menurut hasil dari Teorema 6 matriks A tidak bisa didiagonalkan.
�
Teorema 7 Misalkan matriks A berukuran n×nmempunyai sebanyak k nilai karakteristik
λi yang berbeda dengan multisiplisitas mi, i = 1, 2, . . . , k,k∑
i=1
mi = n. Didefinisikan
Ni = ker[(A− λiI)mi], maka
1. dimensi dari ruang bagian linear Ni adalah mi, i = 1, 2, . . . , k
2. ruang vektor Cn berdimensi n atas lapangan kompleks C adalah jumlahan langsungdari ruang bagian Ni, yaitu:
Cn = N1 ⊕N2 ⊕ · · · ⊕Nk.
Untuk bukti teori tsb. dan materi dasar teori matriks pembaca bisa merujuk pada [Bell-man, 1970]. Suatu ruang linear N merupakan jumlahan langsung dari dua ruang bagianlinear N1 dan N2 ditulis N = N1 ⊕N2 bila untuk setiap x ∈ N bisa secara tunggal dikom-posisikan sebagai x = x1 + x2 dengan x1 ∈ N1 dan x2 ∈ N2. Bila matriks A berukurann × n mempunyai n nilai karakteristik yang berbeda, maka Ni dalam Teorema 7 adalahruang bagian berdimensi satu dibangun oleh vektor karakteristik dengan nilai karakteristikλi.
Teorema 8 Untuk setiap matriks n×n ada suatu matrik T yang punya invers sedemikianhingga
T−1AT = J, (3.29)
dalam hal ini matriks J dinamakan bentuk Jordan yang mempunyai struktur diagonal-blokberbentuk
J = diag(J1, J2, . . . , Jk),
yaitu:
J =
J1 0J2
. . .0 Jk
(3.30)
Disini k didefinisikan seperti didalam Teorema 7. Setiap blok Ji, i = 1, 2, . . . , k, jugamemmpunyai struktur diagonal-blok,
Ji = diag(Ji1, Ji2, . . . , Jili),
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

62 Sistem differensial linier..
dengan li adalah suatu bilangan bulat ≥ 1 dan setiap sub-blok berbentuk seperti berikut
Jij =
λi 1 0 . . . 0. . . . . . . . .
.... . . . . . 0
. . . 10 λi
.
Bila matriks T dipartisi sebagai T = [T1, T2, . . . , Tk], sesuaikan dengan partisi di (3.30),maka vektor kolom Ti membentuk suatu basis untuk ruang bagian Ni. Dari persamaan(3.29) didapat AT = TJ . Bila vektor kolom individu dari T dinotasikan oleh
q1, q2, . . . , qn,
maka kolom ke-i dari AT sama dengan Aqi dan kolom ke-i dari TJ sama dengan λqi+γiqi−1
dengan γi bernilai satu atau nol, bergantung kepada lokasi baris ke-i dari blok Jordan yangsesuai. Jadi
Aqi = λqi + γiqi−1, i = 1, 2, . . . , n, (γ1 = 0), (3.31)
dengan λ adalah suatu nilai karakteristik dan γi nol atau satu. Bila γi = 0 maka qiadalah suatu vektor karakteristik dari A. Bila γi = 1, maka vektor qi dinamakan vektorkarakteristik tergenerallisir.
Selanjutnya dihitung eAt, yaitu
eAt = TeJtT−1.
Pemakaian dari definisi eJt (lihat (3.20)) memberikan
eJt = diag(eJ1t, eJ2t, · · · , eJkt)
dan untuk masing-masing blok
eJit = diag(eJilt, eJilt, · · · , eJili t).
Terakhir untuk masing-masing sub-blok:
eJijt = eλit
1 t t2
2!· · · t
dij−1
(dij−1)!
. . . . . . . . ....
. . . . . . t2
2!. . . t
0 1
,
dengan dij adalah dimensi dari Jij.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 63
Catatan : Perhatikan bahwa bila qi+1, qi+1, · · · , qi+dij adalah vektor karakteristik (tergen-erallisir) untuk blok Jordan Jij dengan nilai karakteristik λi, maka
(A− λiI)kqi+k = 0, k = 1, 2, · · · , dij.
Hal ini bisa dibuktikan sebagai berikut. Untuk k = 1 jelas bahwa (A− λiI)qi+1 = 0 sebabqi+1 adalah suatu vektor karakteristik. Untuk k = 2 bisa ditulis
(A− λiI)2qi+2 = (A− λiI)((A− λiI)qi+2) = (A− λiI)qi−1 = 0,
disini digunakan (3.31). Bukti untuk k yang lebih tinggi bisa digunakan induksi. Jadi vek-tor qi+1, qi+1, · · · , qi+dij membangun ruang bagian linear Ni seperti yang telah dinyatakandalam Teorema 7.
Selanjutnya untuk mempermudah perhitungan dalam mencari bentuk Jordan dari sua-tu matriks A berukuran n× n dengan polinomial karakteristik
(λ− λ1)m1(λ− λ2)
m2 . . . (λ− λk)mk
dengan m1 + m2 + . . . + mk = n dan λi berbeda satu dengan yang lainnya untuk i =1, 2, . . . , k; diberikan langkah-langkah sebagai berikut:
1. Selesaikan persamaan (A− λ1I)v1 = 0.
2. Selesaikan persamaan (A− λ1I)vi = vi−1 dengani = 2, 3, . . . , m1.
3. Ulangi langkah [1.]-[2.] untuk λj dan mj denganj = 2, 3, . . . , k.
4. Pilih matriks T = [v1 v2 . . . vn].
5. Bentuk Jordan dari matriks A diberikan oleh J = T−1AT .
Contoh 14 Diberikan matriks A
A =
0 1 0 025 0 0 00 0 0 1−3
50 0 0
.
Nilai karakteristik dari A adalah λ1,2 = 0, λ3 = 5 dan λ4 = −5. Untuk nilai karakteristik0 rangkap sebanyak 2, diselesesaikan persamaan:
0 1 0 025 0 0 00 0 0 1−3
50 0 0
v1 = 0; didapat v1 =
00−10
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

64 Sistem differensial linier..
Selanjutnya diselesesaikan persamaan:
0 1 0 025 0 0 00 0 0 1−3
50 0 0
v2 =
00−10
; didapat v2 =
000−1
.
Untuk λ3 = 5, diselesaikan persamaan (A− 5I)v3 = 0; yaitu:
−5 1 0 025 −5 0 00 0 −5 1−3
50 0 −5
v3 = 0, didapat v3 =
−253
−1253
15
1
.
Untuk λ4 = −5, diselesaikan persamaan (A + 5I)v4 = 0; yaitu:
5 1 0 025 5 0 00 0 5 1−3
50 0 5
v4 = 0, didapat v4 =
253
−1253
−15
1
.
Sehingga diperoleh matriks T , yang diberikan oleh:
T =
0 0 −253
253
0 0 −1253
−1253
−1 0 15
−15
0 −1 1 1
dan invers matriks T diberikan oleh:
T−1 =
− 3125
0 −1 00 − 3
1250 −1
− 350
− 3250
0 0− 3
50−− 3
2500 0
.
Bentuk Jordan dari matriks A, diberikan oleh J = T−1AT :
J =
− 3125
0 −1 00 − 3
1250 −1
− 350
− 3250
0 0− 3
50−− 3
2500 0
0 1 0 025 0 0 00 0 0 1−3
50 0 0
0 0 −253
253
0 0 −1253
−1253
−1 0 15
−15
0 −1 1 1
=
0 1 0 00 0 0 00 0 5 00 0 0 −5
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 65
dan
eJt =
1 t 0 00 1 0 00 0 e5t 00 0 0 e−5t
.
Sedangkan matriks eAt diberikan oleh:
eAt = TeJtT−1 =
cosh 5t 15sinh 5t 0 0
5 sinh 5t cosh 5t 0 03
125(1− cosh 5t) 3
625(5t− sinh 5t) 1 t
− 325sinh 5t 3
125(1− cosh 5t) 0 1
.
�
Contoh 15 Diberikan matriks A
A =
0 1 0 03 0 0 20 0 0 10 −2 0 0
.
Nilai karakteristik dari A adalah λ1,2 = 0, λ3 = i dan λ4 = −i. Dengan melakukan per-hitungan serupa dengan contoh sebelumnya, masing-masing matriks T dan T−1 diberikanoleh:
T =
0 −23
1 10 0 i −i1 0 2i −2i0 1 −2 −2
, T−1 =1
1250
0 −2 1 0−6 0 0 −3−3
2−1
2i 0 −1
−32
12i 0 −1
. Sedangkan bentuk Jordan dari matriks A diberikan oleh:
J =
0 1 0 00 0 0 00 0 i 00 0 0 −i
dan eJt =
1 t 0 00 1 0 00 0 eit 00 0 0 e−it
.
Sedangkan matriks eAt diberikan oleh:
eAt = TeJtT−1 =
4− 3 cos t sin t 0 2− 2 cos t3 sin t cos t 0 2 sin t
−6t+ 6 sin t −2 + 2 cos t 1 −3t + 4 sin t−6 + 6 cos t −2 sin t 0 −3 + 4 cos t
.
Latihan 14 Hitung eAt bila
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

66 Sistem differensial linier..
1. A =
(
0 00 0
)
. 2. A =
(
1 2−2 1
)
.
3. A =
(
0 10 0
)
. 4. A =
(
−1 01 −1
)
.
5. A =
(
1 00 2
)
.
Latihan 15 Bila A1 dan A2 dua matriks yang komutatif, maka tunjukkan bahwa e(A1+A2)t =eA1teA2t. Berikan contoh penyangkal terhadap persamaan ini bila A1 dan A2 tidak komu-tatif.
Latihan 16 Diberikan sistem dengan order n x(t) = Ax(t) dengan
A =
0 1 0 . . . 0...
. . .. . .
. . ....
.... . .
. . . 00 . . . . . . 0 1
−a0 −a1 . . . −an−2 −an−1
.
Tunjukkan bahwa polinomial karakteristik dari A adalah
λn + an−1λn−1 + . . .+ a1λ+ a0.
Bila λ adalah suatu nilai karakteristik dari A, maka tunjukkan bahwa vektor karakteristikyang bersesuaian adalah:
(1, λ, λ2, . . . , λn−1)T .
Latihan 17 Tunjukkan bahwa suatu bentuk Jordan matriks
A =
1 −1 0 . . . . . . 01 −1 0 . . . . . . 00 1 −1 0 . . . 0...
. . .. . .
...0 . . . . . . 1 −1 00 . . . . . . 0 1 −1
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 67
adalah
0 1... 0 . . . . . . . . . 0
0 0... 0 . . . . . . . . . 0
. . . . . . . . . . . . . . . . . . . . . . . .
0 0... −1 1 0 . . . 0
0 . . .... 0 −1 1 0 0
......
. . .. . .
. . . 0...
... 0 −1 1
0 . . .... . . . . . . . . . 0 −1
.
�
Sebagaimana telah dibahas sebelumnya untuk menghitung matriks eksponesial eAt
adalah tidak begitu sederhana. Beberapa tahapan harus dilakukan, yaitu : bila ma-triks persegi A bisa didiagonalkam, maka menghitung matriks eksponensial eAt adalahmudah dilakukan. Namum prosedur untuk mendapatkan matriks A menjadi bentuk diag-onal tidaklah sederhana. Hal ini melibatkan beberapa pemahaman yang berkaitan denganpengertian pasangan vektor karakteristik dan nilai karakteristik dari matriks A. Begitujuga bila matriks A tidak bisa didiagonalkan, maka matriks A dijadikan matriks ham-pir diagonal yaitu matriks bentuk Jordan, sehingga penghitungan matriks eksponensialeAt menjadi agak mudah. Tetapi kompleksitas kesulitan untuk memperoleh matriks Jor-dan ini dibandingkan dengan mendapatkan matriks yang bisa didiagonalkan adalah lebihrumit. Hal ini berkaitan dengan masalah bahwa multiplisitas aljabar dari suatu nilaikarakteristik lebih besar dari pada multiplisitas geometrinya. Oleh karena itu dalam pem-bahasan berikut ini diberikan suatu cara lain untuk menghitung matriks eksponensial eAt
berdasarkan persamaan (3.25), yaitu :
f(At) = c0 I + c1A + c2A2 + · · ·+ cn−1A
n−1, (3.32)
dengan f(At) = eAt. Dari persamaan (3.32) ini bila nilai-nilai c0, c1, · · · , cn−1 bisa diten-tukan, maka matriks eksponensial eAt bisa diperoleh. Misalkan bahwa semua nilai karak-teristik dari matriks A, λk, k = 1, 2, · · · , n berbeda, koefisien c0, c1, . . . , cn−1 bisa diperolehdari kondisi
f(λk) = eλk(t) = c0 + c1λk + . . .+ cn−1λn−1k , k = 1, 2, · · · , n. (3.33)
Persamaan (3.33) adalah persamaan linear dengan n persamaan dan n peubah dan dapatditulis dalam bentuk matrix
1 λ1 . . . (λ1)n−1
1 λ2 . . . (λ2)n−1
......
. . ....
1 λn . . . (λn)n−1
c0c1...
cn−1
=
eλ1t
eλ2t
...eλnt
(3.34)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

68 Sistem differensial linier..
Selesiakan Persamaan (3.34), maka didapat c0, c1, . . . , cn−1. Bila nilai karakteristik adayang sama, misalkan λ1 = λ2 = . . . = λm dan sisanya λm+1, . . . , λn berbeda. Makac0, c1, . . . , cm, cm+1 · · · , cn didapat dari persamaan linear berikut.
eλ1t = c0 + c1λ1 + · · ·+ cn−1λn−11
d
dλ1eλ1t =
d
dλ1
(
c0 + c1λ1 + · · ·+ cn−1λn−11
)
d2
dλ21eλ1t =
d2
dλ21
(
c0 + c1λ1 + · · ·+ cn−1λn−11
)
...dm−1
dλm−11
eλ1t =dm−1
dλm−11
(
c0 + c1λ1 + · · ·+ cn−1λn−11
)
eλm+1t = c0 + c1λm+1 + · · ·+ cn−1λn−1m+1
...
eλnt = c0 + c1λn + · · ·+ cn−1λn−1n
Contoh 16 Diberikan matriks
A =
[
2 41 2
]
⇒ λ1 = 0, λ2 = 4.
Didapat
f(A) = eA = c0 I + c1A =
[
2c1 + c1 4c1c1 2c1 + c0
]
dan f(λ) = c0 + c1λ. Sehingga diperoleh
e0 = c0 + c1 (0) ⇒ c0 = e0 = 1
e4 = c0 + c1 (4) ⇒ c1 =e4 − 1
4.
Jadi
eA =
2e4 − 1
4+ 1 e4 − 1
e4 − 1
42e4 − 1
4+ 1
=
e4
2+
1
2e4 − 1
e4
4− 1
4
e4
2+
1
2
.
Contoh 17 Dapatkan matriks transisi dari matriks
A =
5 7 −50 4 −12 8 −3
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 69
JawabPolinomial karakteristik dari A diberikan oleh
det(λI − A) = det
λ− 5 −7 50 λ− 4 1−2 −8 λ+ 3
= 0
atau
λ3 − 6λ2 + 11λ− 6 = (λ− 1)(λ− 2)(λ− 3) = 0.
Didapat nilai karakteristik dari A, λ1 = 1, λ2 = 2, λ3 = 3. Sehingga didapat persamaan
1 1 11 2 (2)3−1
1 3 (3)3−1
b0b1b2
=
et
e2t
e3t
.
Nilai b0, b1, b2 diberikan oleh
b0 =
∣
∣
∣
∣
∣
∣
et 1 1e2t 2 4e3t 3 9
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
1 1 11 2 41 3 9
∣
∣
∣
∣
∣
∣
=2e3t − 6e2t + 6et
2= e3t − 3e2t + 3et,
b1 =
∣
∣
∣
∣
∣
∣
1 et 11 e2t 41 e3t 9
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
1 1 11 2 41 3 9
∣
∣
∣
∣
∣
∣
=−3 e3 t + 8 e2 t − 5 et
2= −3 e3 t
2+ 4 e2 t − 5 et
2
dan
b2 =
∣
∣
∣
∣
∣
∣
1 1 et
1 2 e2t
1 3 e3t
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
1 1 11 2 41 3 9
∣
∣
∣
∣
∣
∣
=e3 t − 2 e2 t + et
2=e3 t
2− e2 t +
et
2.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

70 Sistem differensial linier..
Sehingga didapat
eAt = b0I + b1A + b2A2
=(
e3t − 3e2t + 3et)
1 0 00 1 00 0 1
+
(
−3 e3 t
2+ 4 e2 t − 5 et
2
)
5 7 −50 4 −12 8 −3
+
(
e3 t
2− e2 t +
et
2
)
15 23 −17−2 8 −14 22 −9
=
e3 t + 2 e2 t − 2 et e3 t + 5 e2 t − 6 et −e3 t − 3 e2 t + 4 et
−e3 t + 2 e2 t − et −e3 t + 5 e2 t − 3 et e3 t − 3 e2 t + 2 et
−e3 t + 4 e2 t − 3 et −e3 t + 10 e2 t − 9 et e3 t − 6 e2 t + 6 et
.
Contoh 18 Diberikan matriks
A =
1 1 00 1 00 0 2
.
Polinomial karakteristik dari A adalah
p(λ) = (λ− 1)2(λ− 2) = 0,
didapat λ1 = λ2 = 1 dan λ3 = 2. Sehingga diperoleh persamaan linear
et = b0 + b1 + b2
tet = b1 + 2b2
e2t = b0 + 2b1 + 4b2
atau dalam bentuk matriks
1 1 10 1 21 2 4
b0b1b2
=
et
tet
e2t
⇒
b0b1b2
=
0 −2 12 3 −2−1 −1 1
et
tet
e2t
.
Didapat
b0b1b2
=
e2 t − 2 t et
−2 e2 t + 3 t et + 2 et
e2 t − t et − et
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 71
Dengan demikian matriks transisi eAt diberikan oleh
eAt = b0I + b1A + b2A2
=(
e2 t − 2 t et)
1 0 00 1 00 0 1
+(
−2 e2 t + 3 t et + 2 et)
1 1 00 1 00 0 2
+(
e2 t − t et − et)
1 2 00 1 00 0 4
=
et t et 00 et 00 0 e2 t
.
Contoh 19 Diberikan matriks
A =
[
0 1−1 0
]
⇒ λ1 = i, λ2 = −i.
Didapat
f(At) = eAt = c0 I + c1A =
[
c0 c1−c1 c0
]
dan f(λ) = eλ t = c0 + c1 λ. Sehingga diperoleh
eit = c0 + c1 i
e−it = c0 + c1 (−i)
⇒c0 =
eit + e−it
2= cos t
c1 =eit − e−it
2i= sin t
Jadi
eAt =
[
cos t sin t− sin t cos t
]
.
Contoh 20 Diberikan matriks
A =
0 0 01 0 01 0 1
⇒ λ1 = 0 = λ2, λ3 = 1.
Didapatf(At) = eAt = c0 I + c1A+ c2A
2
=
c0 0 0c1 c0 0
c2 + c1 0 c2 + c1 + c0
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

72 Sistem differensial linier..
dan f(λ) = eλ t = c0 + c1 λ+ c2 λ2, untuk λ = 0, didapat satu tambahan persamaan
d
dλeλ t = c1 + 2c2 λ
ataut eλ t = c1 + 2c2 λ.
Sehingga diperoleh :
e0 t = c0 + c1 (0) + c2 (0)2
t e0 t = c1 + 2c2 (0)et = c0 + c1 (1) + c2 (1)
2
⇒c0 = 1c1 = tc2 = et − t− 1.
Jadi
eAt =
1 0 0t 1 0
et − 1 0 et
.
�
Untuk matriks yang dapat didiagonalkan A bisa ditulis
A = TDT−1 = (v1 · · · vn)
λ1 0. . .
0 λn
w1...wn
, (3.35)
dengan {vi} adalah vektor kolom dari T dan {wi} adalah vektor baris dari T−1. Mudah
ditunjukkan bahwa A =n∑
i=1
λiviwi. Produk dari suatu kolom vektor dan vektor baris (viwi)
dinamakan suatu dyad (suatu dyad mempunyai rank maximal satu).Matriks A adalah jumlah dari n dyad. Transisi matriks bisa ditulis sebagai:
eAt = T
eλ1 0. . .
0 eλn
T−1 =
n∑
i=1
eλitviwi. (3.36)
Oleh karena itu penyelesaian x = Ax dengan x(0) = x0 dapat ditulis sebagai:
x(t) = eAtx0 =n∑
i=1
eλitviwix0 =n∑
i=1
µieλitvi, (3.37)
dimana µi = wix0 adalah besaran skalar. Penyelesaian dari x = Ax (x = Ax+Bu denganu = 0 adakalanya sangat beralasan disebut respon bebas) adalah terdekomposisi sepan-jang vektor karakteristik, yaitu sebagai kombinasi linear dari suku-suku dengan koefisien
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penyelesaian persamaan differensial linier.. 73
exponensial. Penyelesaian yang berkaitan dengan hanya satu vektor karakteristik (yaitu,x0 sedemikian hingga µi 6= 0 untuk beberapa i dan µk = 0 untuk k 6= i) disebut suatumode dari sistem. Untuk λi bilangan konpleks formula diatas menjadi sebagai berikut:Misalkan λ = σ + iω, σ, ω ∈ R adalah suatu nilai karakteristik A dengan vektor karakter-istik yang bersesuaian v = r+ is, r, s ∈ Rn. Oleh karena itu Av = λv dan Av = λv, tanda‘¯’ menyatakan kompleks konjugate. Jadi λ = σ − iω dan v = r − is. Misalkan x0 beradapada ruang bagian yang dibangun oleh r dan s. Maka dengan a, b ∈ R,
x0 = ar + bs =1
2(a− ib)(r + is) +
1
2(a+ ib)(r − is) = µv + µv,
dimana µ = 12(a− ib) ∈ C. Respon bebas diberikan oleh:
x(t) = µeλtv + µeλtv.
Bila µ ditulis sebagai µ = p
2ieiφ dengan p dan φ bilangan real, maka
x(t) =p
2i(eλt+iφv + eλt−iφv)
= peσt(r sin(ωt+ φ) + s cos(ωt+ φ)).
Didalam beberapa pemakaian, sistem adjoint dari x = Ax, didefinisikan sebagai
˙x = −AT x memainkan suatu peranan. Mudah diselidiki bahwad
dt(xT x) = 0, terlihat
bahwa bahwa hasil kali dalam (innerproduct) dari vektor x(t) dan x(t) tidak bergantungpada waktu.
Teorema 9 Bila Φ(t, s) matriks transisi untuk x(t) = A(t)x(t), maka ΦT (s, t) adalah ma-triks transisi untuk persamaan adjoint ˙x(t) = −AT (t)x(t).
Bukti Differensialkan I = Φ−1(t, s)Φ(t, s) untuk memperoleh:
0 =d
dtI =
d
dt[Φ−1(t, s)Φ(t, s)]
= [d
dtΦ−1(t, s)]Φ(t, s) + Φ−1(t, s)[
d
dtΦ(t, s)]
= [d
dtΦ−1(t, s) + Φ−1(t, s)A(t)]Φ(t, s)
Karena Φ(t, s) non-singular maka haruslah:
d
dtΦ−1(t, s) = −Φ−1(t, s)A(t)
ataud
dt{Φ−1(t, s)}T = −AT (t){Φ−1(t, s)}T ,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

74 Sistem differensial linier..
yang mana hal ini ekivalen dengan
d
dt{Φ(s, t)}T = −AT (t){Φ(s, t)}T .
�
3.4 Respon impuls dan step
Penyelesaian dari x = A(t)x+B(t)u bisa diuraikan sebagai
x(t) = Φ(t, t0)x0 +
∫ t
t0
Φ(t, s)B(s)u(s)ds (3.38)
Bila suatu fungsi masukan berbentuk
y(t) = C(t)x(t) +D(t)u(t)
maka y(t) bisa diungkapkan didalam u(.) sebagai berikut:
y(t) = C(t)Φ(t, t0)x0 +
∫ t
t0
C(t)Φ(t, s)B(s)u(s)ds+D(t)u(t). (3.39)
Selanjutnya didefinisikan matriks K(t, s) berukuran p×m sebagai berikut:
K(t, s) = C(t)Φ(t, s)B(s). (3.40)
Karena Φ(t, s) kontinu terdifferensial dalam argumennya dan C(t) dan B(t) diasumsikankontinu bagian demi bagian, maka matriks K(t, s) juga kontinu bagian demi bagian dalamargumennya.
Diasumsikan bahwa ada t0 sedemikian hingga x(t0) = 0. Dalam hal ini hanya tertarikdi dalam sistem untuk t ≥ t0 dan diasumsikan bahwa u(s) = 0 untuk s < t0, maka (3.39)bisa ditulis sebagai:
y(t) = (Fu)(t) =
∫ t
−∞K(t, s)u(s)ds+D(t)u(t), (3.41)
dimana F adalah suatu pemetaan: F : U → Y dengan U = CB+(Rm), Y = CB+(R
p).Notasi CB+ artinya adalah kontinu bagian demi bagian dalam argumennya dan bernilainol untuk t ≤ t0. Catatan pemetaan F yang disajika oleh K(t, s) dan D(t) mengkarakter-isasi uraian luar sistem, yaitu fungsi masukan secara langsung dipetakan kedalam fungsikeluaran tanpa ’perantara’ keadaan. Dalam hal ini keadaan tereliminasi. Berikutnya dia-sumsikan bahwa D(t) = 0, menghasilkan berikut ini:
y(t) = (Fu)(t) =
∫ t
−∞K(t, s)u(s)ds. (3.42)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Respon impuls dan step.. 75
Matriks fungsi K(t, s) mempunyai interpretasi berikut. Misalkan fungsi masukan adalahu(t) = δ(t − t1)ei, dimana ei adalah vektor basis ke-i dan δ(t − t1) adalah fungsi deltayang didefinisikan sebagai berikut:
∫ ∞
−∞δ(t− t1)φ(t)dt = φ(t1)
untuk setiap fungsi φ(.). Fungsi δ(t− t1) bisa didefinisikan sebagai limit dari barisan fungsiuntuk n→ ∞
fn(t− t1) =
n
2untuk |t− t1| <
1
n
0 untuk |t− t1| ≥1
n
Keluaran untuk masukan fungsi delta adalah:
y(t) =
∫ t
−∞δ(s− t1)eids = kolom ke− i K(t, t1).
Kolom-kolom matriks K(t, t1) bisa diinterpretasikan sebagai respon dari sistem (keluaran)pada waktu t disebabkan oleh suatu fungsi masukan berbentuk suatu impuls (yaitu suatufunfsi δ) pada waktu t1. Oleh karena itu K(t, s) disebut matriks respon impuls.
Yang terkait dengan respon impuls adalah respon step. Sekarang sebagai ganti fungsimasukan berbentuk impuls digunakan fungsi masukan yang berbentuk step. Fungsi stepyang demikian disebut fungsi Heaviside H(t− t1) yang didefinisikan sebagai berikut:
H(t− t1) =
{
1 untuk t ≥ t10 untuk t < t1.
Perhatikan bahwa fungsi H(t− t1) bukan merupakan klas fungsi masukan kontinu bagiandemi bagian. Untuk fungsi impuls perlu juga diperhatikan bahwa fungsi ini bukanlah suatufungsi seperti fungsi sebagai mana biasanya. Selain itu hubungan diantara fungsi step danfungsi impuls dalam versi integral diberikan oleh:
H(t− t1) =
∫ t
−∞δ(s− t1)ds.
Keluaran dari masukan fungsi step H(t− t1)ei dengan pengasumsian bahwa sistem dimulaidari awal pada waktu t0 jauh pada massa yang lalu adalah:
y(t) =
∫ t
−∞K(t, s)H(s− t1)eids =
∫ t
t1
K(t, s)eids.
Matriks S(t, t1) =∫ t
t1K(t, s)eids berukuran p×m disebut matriks respon step. Hubun-
gan diantara S(t, t1) dan K(t, t1) adalah:
d
dsS(t, s) =
d
ds
∫ t
s
K(t, τ)dτ = −K(t, s). (3.43)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

76 Sistem differensial linier..
Untuk sistem invarian-waktuK(t, s) = CeA(t−s)B.
Matriks K(t, s) biasanya ditulis sebagai G(t) yaitu hanya tergantung pada satu parameter
G(t− s) = CeA(t−s)B. (3.44)
Uraian luar (3.42) tidak hanya berlaku bagi sistem differensial linear (kausal ketat) sepertiditunjukkan dalam contoh berikut.
Contoh 21 Tinjau sistem masukan-keluaran tunggal berbentuk:
y(t) =1
T
∫ t
t−T
u(s)ds,
yang mana ada kalanya disebut rata-rata gerakan. Sistem ini adalah linear, invarian-waktu dan fungsi respon impulsnya adalah:
G(τ) =
1
Tuntuk 0 ≤ τ ≤ T
0 untuk τ > T.
Sistem ini bukan berbentuk (3.12) seperti yang akan terlihat sebagai akibat langsung dariteorema berikut. Bila diinginkan untuk mendefinisikan suatu keadaan pada sistem ini,maka akan jelas bahwa secara intuisi sistem tsb. mempunyai ruang keadaan berdimensitak hingga (faktanya, keadaan x(t) sama dengan fungsi u pada interval [t− T, t)).
�
Teorema 10 Diberikan suatu K(t, s) sebagai matriks respon impuls dari suatu sistem lin-ear dimensi hingga (yaitu berbentuk (3.12)) bila dan hanya bila ada suatu dekomposisidipenuhi untuk semua t dan s berbentuk
K(t, s) = H1(t)H2(s),
dengan H1 dan H2 adalah matriks berdimensi hingga.
Bukti Syarat cukup. Misalkan bahwa pemfaktoran diberikan dalam pernyataan teo-rema adalah mungkin. Tinjau realisasi A = 0, B = H1danC = H2, yaitu
x(t) = H1(t)u(t), y(t) = H2(t)x(t).
Didapat:
y(t) = H2(t)x(t0) +H2(t)
∫ t
t0
H1(σ)u(σ)dσ
= H2(t)x(t0) +
∫ t
t0
K(t, σ)u(σ)dσ.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Respon impuls dan step.. 77
Syarat perlu. Misalkan diberikan suatu sistem linear berbentuk (3.12). Maka untuksistem ini didapat:
K(t, s) = C(t)Φ(t, s)B(s).
Tetapi, bila t1 sebarang konstanta, dari hukum komposisi untuk matriks transisi diperoleh:
Φ(t, s) = Φ(t, t1)Φ(t1, s).
Bila dibuat identifikasi
H1(t) = C(t)Φ(t, t1) dan H2(t) = Φ(t1, s)B(s),
didapat:
H1(t)H2(t) = C(t)Φ(t, t1)Φ(t1, s)B(s) = C(t)Φ(t, s)B(s) = K(t, s).
�
Bila ditulis
y(t) =
∫ +∞
−∞K(t, s)u(s)ds, y(t) =
∫ +∞
−∞G(t− s)u(s)ds, (3.45)
dengan batas atas +∞ secara prinsip didapat suatu sistem tak-kausal.
Catatan : Kausal berarti bahwa evolusi sistem pada saat ini tidak dapat bergantung padaphenomena yang akan terjadi pada massa mendatang.
Sistem kausal membentuk suatu sub-klas dari klas sistem yang diuraikan oleh (3.45)dengan
K(t, s) = 0 untuk t < s atau G(τ) = 0 untuk τ < 0.
Perilaku luar dari suatu sistem differensial linear secara lengkap ditentukan oleh K(t, s)dan D(t). Adalah mungkin bahwa himpunan matriks yang berbeda(A(t), B(t), C(t)) memberikan matriks K(t, s) yang sama. Misalkan hal ini hanya dibahasuntuk sistem invarian-waktu:
x = Ax+Bu, y = Cx+Du, G(t) = CeAtB. (3.46)
Bila S : Rn → Rn suatu transformasi basis yang punya invers dalam ruang keadaanX = Rn, maka untuk tranformasi keadaan z = Sx didapat persamaan berikut:
z = Sx = SAx+ SBu = SAS−1z + SBu
y = Cx+Du = CS−1z +Du.
Transformasi basis S mentransformasi himpunan matriks(A,B,C,D) kedalam (SAS−1, SB, CS−1, D). Perhitungan dari matriks respon impulsuntuk sistem yang ditransformasi memberikan:
G(t) = CS−1eSAS−1tSB = CS−1SeAtS−1SB = CeAtB
terlihat bahwa transformasi basis tidak mengubah G(t). Hal ini menjelaskan bahwa pemil-ihan suatu basis baru dalam ruang keadaan tidak akan mengubah perilaku luar dari suatusistem.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

78 Sistem differensial linier..
Definisi 1 Dua sistem linear
x = Ax+Bu, y = Cx+Du, x ∈ Rn
dan˙x = Ax+ Bu, y = Cx+ Du, x ∈ R
n
dengan banyaknya masukan sama begitu juga banyaknya keluran sama adalah isomorpik biladan hanya bila ada suatu transformasi linear yang punya invers S : Rn → Rn sedemikianhingga
A = SAS−1, B = SB, C = CS−1, D = D.
Hubungan dari dua sistem dalam definisi diatas diberikan oleh diagram isomorpik yangdigambarkan pada Gambar 3.6.
Rn
Rn
Rn
Rn
RmRp
A
A
S S
C
C
B
B
Gambar 3.6: Diagram isomorpik
Sebelum Defenisi 1 telah ditunjukkan bahwa dua sistem isomorpik mempunyai matriksrespon impuls yang sama. Adalah jelas bahwa diberikan fungsi respon impuls ada realisasi-realisasi (A,B,C,D) yang mempunyai vektor keadaan dengan dimensi berbeda. Suatucontoh trivial dari keadaan ini adalah dengan menambah suatu persamaan vektor padasistem (3.46) yang tidak mempunyai pengaruh pada masukan, yaitu:
x = Ax+Bu
˙x = F x+Gu
y = Cx+Du.
Kelihatannya tidak terdapat batas atas pada dimensi suatu realisasi dari suatu fungsi re-spon impuls. Bagaimanapun dengan kondisi yang bisa diterima ada batas bawah. Bila su-atu sistem diberikan oleh matriks (A,B,C,D) merealisasikan fungsi respon impuls K(t, s)dinamakan suatu minimal realisasi bila tidak ada realisasi lain dari K(t, s) yang mem-punyai vektor keadaan berdimensi lebih rendah. Dimensi minimum disebut tingkat darifungsi respon impuls.
Cabang yang dikenal dari teori sistem yang berkaitan dengan masalah realisasi adalahdiberikan uraian luar dari suatu sistem (misalnya yang ditentukan oleh pemetaan F dalam
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Respon impuls dan step.. 79
(3.41)), tentukan/cari uraian keadaan sistem. Pada sistem invarian waktu dimensi hinggapermasalahan tsb. adalah diberikan fungsi matriks respon impuls G(t), cari/dapatkanmatrks A n×n, B n×m dan C p×n sedemikian hingga G(t) = CeAtB, n juga ditentukan.Suatu kesimpulan walaupun dengan minimal dimensi n keberadaan realisasi tidak tunggal,misalnya bila (A,B,C,D) suatu realisasi, maka (SAS−1, SB, CS−1, D) juga suatu realisasiberdimensi vektor keadaan sama, dimana S matriks taksingular n× n.
Latihan 18 Diberikan persamaan keadaan
x(t) =
(
0 2−2 −5
)
x(t) +
(
01
)
+ u(t)
y(t) =(
1 0)
x(t).
a). Dapatkan respon impuls untuk t ≥ 0.b). Bila u(t) adalah step function dan x1(0) = 1, x2(0) = 2, dapatkan responnya untukt ≥ 0.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

80 Sistem differensial linier..
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bab 4Sifat-sifat sistem
4.1 Kestabilan
Ada beberapa konsep kestabilan untuk persamaan differensial. Kestabilan ini dibedakanmenurut kestabilan sistem autonomus (berkaitan dengan vektor keadaan) dan kestabilanyang dikaitkan dengan masukan dan keluaran sistem (kestabilan didefinisikan dari segimasukan dan keluaran).
4.1.1 Kestabilan dari segi nilai karakteristik
Definisi 2 Diberikan persamaan differensial tingkat satu x(t) = f(x(t)) dengan x ∈ Rn,penyelesaan dengan keadaan awal x(0) = x0 dinotasikan oleh x(t, x0).
• Vektor x yang memenuhi f(x) = 0 disebut suatu titik setimbang.
• Suatu titik setimbang x dikatakan stabil bila untuk setiap ǫ > 0 ada δ > 0 dan tδsedemikian hingga bila ‖xtδ − x‖ < δ maka ‖x(t, xtδ)− x‖ < ǫ untuk semua t > tδ.
• Suatu titik setimbang x dikatakan stabil asimtotik bila ia stabil dan bila ada δ1 > 0sedemikian hinggalimt→∞ ‖x(t, xtδ)− x‖ = 0 bila ‖xtδ − x‖ < δ1.
• Suatu titik setimbang dikatakan takstabil bila ia tidak stabil.
Dalam definisi tsb. tanda ‖ . ‖ berarti norm, biasanya digunakan norm Euclidean. Secaraintuisi stabil berarti penyelesaian sangat dekat ketitik setimbang didalam suatu sekitar.Sedangkan stabil asimtotik berarti penyelesaian konvergen ke titik setimbang (asalkan titikawal adalah cukup dekat ke titik setimbang). Takstabil artinya selalu ada penyelesaianyang dimulai dari manapun dekatnya dengan titik setimbang tapi akhirnya menjauh darititik setimbang.
81

82 Sifat-sifat sistem..
Untuk suatu persamaan differensial linear x = Ax dengan A berukuran n× n, sebagaititik setimbang diambil titik asal x = 0 meskipun mungkin ada yang lainnya asalkandeterminan matriks A sama dengan nol. Untuk selanjutnya dikatakan bahwa persamaandifferensial x = Ax atau bahkan matriks A itu sendiri adalah stabil asimtotik, stabil atautakstabil bila titik asal x = 0 sebagai titik setimbang adalah stabil asimtotik, stabil atautakstabil.
Perlu diperhatikan bahwa, pengertian dari stabil asimtotik, stabil dan takstabil tidakbergantung pada pilihan basis. Jadi, bila suatu persamaan differensial adalah stabil asim-totik yang berkaitan dengan satu basis, maka ia stabil asimtotik terhadap pilihan basisyang lainnya. Hal ini juga berlaku untuk pengertian stabil dan takstabil. Oleh karenaitu, untuk menguji masalah kestabilan, suatu hal yang terbaik adalah menggunakam basisdengan diskripsi sesederhana mungkin.
Satu contoh berikut menjelaskan diskripsi matematika yang menjelaskan pengertiansuatu persamaan differensial linear adalah stabil.
Contoh 22 Selidiki kestabilan sistem x(t) = −2x(t) dengan keadaan awal x(0) = 1.Jawab : Penyelesaian sistem adalah x(t, 0) = e−2t. Untuk titik setimbang x = 0, sistemadalah stabil sebab diberikan sebarang ε > 0 dapat dipilih δ > 0 dan tδ dengan δ = ε
2dan
tδ = ln( ε3)−
12 , sehingga bila
|xtδ − x| = |xtδ − 0| = |xtδ | =∣
∣
∣
ε
3
∣
∣
∣=ε
3<ε
2= δ,
maka didapat|x(t, tδ)− x| =
∣
∣e−2t − 0∣
∣ = e−2t < ε, untuk t > tδ.
�
Teorema berikut memberikan syarat kestabilan dari persamaan differensial x = Ax, dimanamatriks A mempunyai peranan penting kususnya nilai karakteristik dari matriks A yaitubagian real dari λ yang dinotasikan oleh Reλ.
Teorema 11 Diberikan persamaan differensial x = Ax dengan matriks A berukuran n×ndan mempunyai nilai karakteristik yang berbeda λ1, · · · , λk (k ≤ n).
• Titik asal x = 0 adalah stabil asimtotik bila dan hanya bila Reλi < 0 untuk semuai = 1, · · · , k.
• Titik asal x = 0 adalah stabil bila dan hanya bila Reλi ≤ 0 untuk semua i = 1, · · · , kdan untuk semua λi dengan Reλi = 0 multisiplisistas aljabar sama dengan mutipli-sistas geometrinya.
• Titik asal x = 0 adalah takstabil bila dan hanya bila Reλi > 0 untuk beberapa i =1, · · · , k atau ada λi dengan Reλi = 0 dan multisiplisistas aljabar lebih besar darimutiplisistas geometrinya.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kestabilan.. 83
BuktiDalam bukti digunakan formula
eAt = TeJtT−1, (4.1)
dimana J adalah bentuk Jordan. Mudah diselidiki bahwa semua elemen eJt mendekati noluntuk t→ ∞ bila semua nilai karakteristik bagian realnya lebih kecil dari nol. Maka dariitu eAt juga mendekati nol dan akibatnya penyelesaian x(t) = eAtx0 juga mendekati nol.Bila beberapa bagian real dari nilai karakteristik sama dengan nol hal sedikit lebih rumit.Sub-blok Jij dari J dengan Rλi < 0 tetap tidak ada masalah (sebab eJijt → 0 bila t→ ∞),tetapi sub-blok dengan bagian real dari λi = 0 mungkin bisa merusak kestabilan, untukkasus yang ini matriks
eJijt = eλit
1 t t2
2!· · · t
dij−1
(dij−1)!
. . . . . . . . ....
. . . . . . t2
2!. . . t
0 1
.
Terlihat bahwa eλit tetap terbatas (tetapi tidak mendekati nol sebab |eλit| = 1), sedangkanelemen-elemen dalam matriks tidak semuanya terbatas, yaitu elemen-elemen t, 1
2!t2,dst.
Elemen-elemen ini akan muncul bila ukuran dari matriks Jij lebih besar dari 1× 1. Untukkasus ini suatu kondisi awal akan ada sehingga menghasilkan suatu penyelesaian menjaditakterbatas. Oleh karenya bila ukuran dari Jij adalah lebih besar dari 1 × 1, maka takakan terjadi kestabilan. Sebaliknya bila semua matriks sub-blok Jij dengan bagian realnilai karakteristiknya sama dengan nol semuanya berukuran 1 × 1 (multiplisistas aljabardari λi sama dengan multiplisistas geometrinya), maka kestabilan akan dijamin. Kondisiyang diberikan dalam pernyataan ini memberikan fakta bahwa semua sub-blok mempunyaiukuran 1× 1.
�
Contoh 23 Diberikan persamaan differensial x = Ax dimana A:
1. A =
(
0 00 0
)
, 2. A =
(
0 10 0
)
,
3. A =
(
1 2−2 1
)
, 4. A =
(
1 00 2
)
dan
5. A =
(
−1 01 −1
)
.
Untuk yang pertama adalah stabil, yang kelima stabil asimtotik, sedangkan yang lainnyatakstabil.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

84 Sifat-sifat sistem..
Latihan 19 Selidiki kestabilan dari matriks A dalam contoh pendulum terbalik dan orbitsatelit.
�
Contoh 24 Hasil dari Teorema 11 tidak berlaku untuk sistem varian-waktu seperti ditun-jukkan oleh penyelesaian dari persamaan defferensial berikut:
d
dt
(
x1x2
)
=
(
4a −3ae8at
ae−8at 0
)(
x1x2
)
,
dimana a adalah suatu parameter real. Nilai karakteristik dari matrik sistem adalah λ1 =a, λ2 = 3a. Jadi untuk a < 0 kedua nilai karakterisitik tsb. bagian realnya lebih kecil darinol. Bagaimanapun kasus ini, penyelesaian eksak dengan kondisi awal x1(0) = x10 , x2(0) =x20 adalah:
x1(t) =3
2(x10 + x20)e
5at − 1
2(x10 + 3x20)e
7at
x2(t) =1
2(x10 + 3x20)e
−at − 1
2(x10 + x20)e
−3at,
yang mana tak stabil untuk setiap a 6= 0. Hal ini bisa ditunjukkan, misalnya untukx10 = 1, x20 = −1 didapat x1(t) = e7at dan x2(t) = −e−at. Jadi ada suatu kondisi awaldimana penyelesaiannya menjauhi titik asal yang merupakan satu-satunya titik setimbang.Kesimpulan ini berlaku bila a > 0 dan juga bila a < 0. Bila a = 0, maka matriks sistemsama dengan nol dan setiap titik setimbang adalah stabil.
�
Definisi 3 Diberikan suatu sistem dimensi-n x = Ax. Ruang bagian stabil untuksistem ini adalah ruang bagian (real) dari jumlahan-langsung dari ruang bagian linearNi (lihat Theorema 7) yang berkaitan dengan nilai karakteristik dari A yaitu nilai-nilaikarakteristik dengan bagian real lebih kecil dari pada nol. Ruang bagian tak-stabildidefinisikan dengan cara serupa, yaitu bekaitan dengan bagian real tak-negatif.
Dari definisi diatas diperoleh bahwa ruang keadaan Rn adalah jumlahan langsung dariruang bagian linear stabil dan tak-stabil.
Latihan 20 Tunjukkan bahwa sistem nonlinear skalar x(t) = −ǫx(t) + x2(t) titik se-timbang x(t) = 0 adalah stabil asimptotik untuk setiap ǫ > 0 dan tidak stabil untukǫ ≥ 0. Bagaimanapun pelinearan sistem disekitar titik setimbang adalah stabil untuk ǫ = 0.Bagaimanakah hal ini bisa dijelaskan?
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kestabilan.. 85
4.1.2 Kriteria Routh-Hurwitz
Nilai-nilai karakteristik dari matriks A adalah akar-akar karakteristik dari polinomial
p(s) = det(sI − A) = ansn + an−1s
n−1 + . . .+ a1s+ a0 (4.2)
dengan an = 1. Kriteria kestabilan Routh-Hurwitz dapat dipakai untuk mengecek lang-sung kestabilan melalui koefisien ai tampa menghitung akar-akar dari polinomial yangada, yaitu dengan melakukan penabelan dan suatu aturan penghitungan dari koefisienai akan diketahui bahwa apakah polinomial yang diberikan oleh persamaan (4.2) semuaakar-akarnya bagian realnya adalah negatif.
Berikut ini diberikan algoritma denga beberapa kasus nuntuk mengetahui polinomialdalam persamaan (4.2) dengan an 6= 0 apakah semua akar-akarnya bagian realnya negatif.Secara matematika kajian kriteria kestabilan Routh-Hurwitz tidaklah sederhana. Pemba-hasan yang lengkap serta beberapa teorema berkaitan dengan kriteria kestabilan Roth-Hurwitz bisa di dapat dalam [7].
Diberikan suatu polinomial
q(s) = ansn + an−1s
n−1 + . . .+ a1s+ a0, an 6= 0
susun tabel sebagai berikut :
sn
sn−1
sn−2
sn−3
...s0
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
an an−2 an−4 . . .an−1 an−3 an−5 . . .b1 b2 b3c1 c2 c3...q
dimana b1, b2, . . . , c1, c2, . . . dan q secara rekursif didapat dari:
b1 =an−1an−2−anan−3
an−1, b2 =
an−1an−4−anan−5
an−1, . . .
c1 =b1an−3−b2an−1
b1, c2 =
b1an−5−b3an−1
b1, . . .
Kriteria Routh-Hurwitz menyimpulkan bahwa : banyaknya perubahan tanda dalam kolompertama pada tabel diatas sama dengan banyaknya akar-akar polinomial q(s) yang bagianrealnya positip. Jadi bila pada kolom pertama dalam tabel tidak ada perubahan tanda(semuanya bertanda positip atau semuanya bertanda negatif), maka semua akar polinomialq(s) bagian realnya adalah tak-positip, bila polinomial ini merupakan polinomial akar-akarkarakteristik dari matriks A dimana x(t) = Ax(t), maka sistem ini adalah stabil.
Contoh 25 Diberikan polinomial q(s) = s3+14s2+41s−56, didapat tabel sebagai berikut
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

86 Sifat-sifat sistem..
:
s3
s2
s1
s0
∣
∣
∣
∣
∣
∣
∣
∣
1 4114 −56
b1 = 45 b2 = 0c1 = −56
b1 =14×41−1×(−56)
14= 45
b2 =14×0−1×0
14= 0
c1 =45×(−56)−14×0
45= −56
Dari tabel terlihat kolom pertama terdapat satu perubahan tanda dari +45 ke −56. Jadipolinomial q(s) = s3 + 14s2 + 41s− 56 mempunyai satu akar yang bagian realnya adalahpositip, hal ini juga bisa dicek dengan memfaktorkan q(s), yaitu q(s) = s3+14s2+41s−56 =(s− 1)(s+ 7)(s+ 8). Terlihat bahwa q(s) mempunyai satu akar yang positip yaitu s = 1.
Contoh 26 Diberikan polinomial q(s) = s4 + 5s3 + s2 + 10s + 1, didapat tabel sebagaiberikut :
s4
s3
s2
s1
s0
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
1 1 15 10
b1 = −1 b2 = 1c1 = 15 c2 = 0d1 = 1
b1 =5×1−1×10
5= −1
b2 =5×1−1×0
5= 1
c1 =−1×10−5×1
−1= 15
c2 =−1×0−5×0
−1= 0
d1 =15×1−(−1)×0
15= 1
Dari tabel terlihat kolom pertama terdapat dua perubahan tanda dari +5 ke −1 dandari −1 ke +15. Jadi polinomial q(s) = s4 + 5s3 + s2 + 10s+ 1 mempunyai dua akar yangbagian realnya adalah positip. Akar-akar dari q(s) adalah : s = 0.1368279+1.3800281i, s =0.1368279− 1.3800281i, s = −0.1005128 dan s = −5.173143.
Berikut ini diberikan suatu cara untuk menangani suatu kasus bila elemen pertamadari suatu baris dari tabel adalah nol sebagai berikut: ganti nol dengan ε dimana ε inisangat kecil. Selanjutnya dalam kolom pertama dari tabel dapatkan banyaknya perubahantanda untuk ε > 0 dan ε < 0. Kedua hal ini akan memberikan hasil yang sama.
Contoh 27 Diberikan polinomial q(s) = s4+s3+s2+s+3, didapat tabel sebagai berikut:
s4
s3
s2
s1
s0
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
1 1 31 1
b1 = ε b2 = 3c1 =
ε−3ε
c2 = 0d1 = 3
b1 =1×1−1×1
1= 0 ⇒ ε = 0
b2 =1×3−1×0
1= 3
c1 =ε×1−1×3
ε= ε−3
ε
c2 =ε×0−1×0
ε= 0
d1 =ε−3ε
×3−ε×0ε−3ε
= 3
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kestabilan.. 87
Dari tabel terlihat kolom pertama untuk ε positip kecil terdapat dua perubahan tandadari +ε ke −
(
3−εε
)
dan dari −(
3−εε
)
ke +3. Jadi polinomial q(s) = s4 + s3 + s2 + 1s + 3mempunyai dua akar yang bagian realnya adalah positip. Akar-akar dari q(s) adalahs = 0.5781471+ 1.0894962i, s = 0.5781471− 1.0894962i, s = −1.0781471+ 0.8998075i dans = −1.0781471− 0.8998075i.
Kasus yang lainnya adalah bila suatu baris dari tabel keseluruhannya bernilai nol,penanganannya adalah bentuk suatu polinomial pembantu berdasarkan pada baris yangsebelumnya dari baris yang semua elemennya nol. Lalu, ganti semua elemen nol denganturunan dari polinomial pembantu. Kasus ini menunjukkan bahwa kemungkinan letakakar-akar dari polinomialnya adalah :
• terletak tepat di sumbu imajiner atau
• bagian real dari akar-akar polinomial terbagi secara simetri atau
• empat akar-akar polinomial terbagi secara simetri.
Kemungkinan letak akar-akar ini bisa dilihat dalam gambar berikut
Im(s)
x
Im(s)
Re(s)Re(s)
Im(s)
Re(s)
xx x
x
x
x
x
Contoh 28 Diberikan polinomial p(s) = s5 + 7s4 + 6s3 + 42s2 + 8s+ 56, didapat tabel
s5
s4
s3
s2
s1
s0
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
1 6 87 42 56
b1 = 0 b2 = 0 b3 = 0c1 c2d1 d2f1
b1 =7×6−1×42
7= 0
b2 =7×8−1×56
7= 0
b3 =7×0−1×0
7= 0
Terlihat dalam tabel, seluruh elemen baris s3 sama dengan nol. Dibentuk polinomialpembantu yang koefisiennya berada pada baris s4 yaitu q(s) = 7s4 + 42s2 + 56, didapatdq(s)ds
= 28s3 + 84s + 0. Selanjutnya ganti elemen-elemen baris s3 dengan 28, 64 dan 0.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

88 Sifat-sifat sistem..
Sehingga diperoleh tabel baru
s5
s4
s3
s2
s1
s0
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
∣
1 6 87 42 5628 84 0
c1 = 21 c2 = 56d1 =
283
d2 = 0f1 = 56
c1 =28×42−7×84
28= 21
c2 =28×56−7×0
28= 56
d1 =21×84−28×56
21= 28
3
d2 =21×0−28×0
21= 0
f1 =283×56−21×0
283
= 56
Dari tabel terakhir ini terlihat kolom pertama tidak ada perubahan tanda (semuanyabertanda positip). Jadi semua akar-akar polinomial bagian realnya tak-positip.
Contoh aplikasi berikut ini sebagai akhir dari pembahasan kriteria kestabilan Routh-Hurwitz.
Contoh 29 Diberikan suatu sistem x(t) = Ax(t). Bila polinomial karakteristik dari ma-triks A adalah p(s) = s3+3s2+3s+(1+k), maka tentukan nilai k yang memenuhi supayasistem stabil.Penyelesaian : dibentuk suatu tabel berikut
s3
s2
s1
s0
∣
∣
∣
∣
∣
∣
∣
∣
1 33 1 + k
b1 =8−k3
c1 = 1 + k
b1 =3×3−1×(1+k)
3= 8−k
3
c1 =(8−k)
3×(1+k)−3×0(8−k)
3
= 1 + k
Supaya sistem stabil didapat :
8−k3> 0 ⇒ k < 8
1 + k > 0 ⇒ −1 < k
⇒ −1 < k < 8.
�
Latihan 21 Untuk nilai k yang mana persamaan λ3+3λ2+3λ+k = 0 hanya mempunyaiakar-akar dengan bagian real yang negatif?
�
4.1.3 Kestabilan Lyapunov
Menentukan apakah semua penyelesaian dari suatu persamaan differensial (invarian atautak-invarian waktu) tetap terbatas atau menuju nol bila t mendekati ∞ adalah suatu
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono
Kestabilan.. 89
masalah yang cukup sulit. Tetapi, hal ini tetaplah mungkin untuk menurunkan syaratcukup yang berguna untuk menjamin bahwa semua penyelesaian yang dimaksud akanterbatas atau bahkan menuju nol. Untuk tujuan ini, diperkenalkan fungsi skalar dari x dant dan dikaji evolusinya terhadap perubahan waktu. Ide asli dasarnya dalam mekanika klasikdimana kriteria kestabilan yang berkaitan dengan pengertian skalar dari energi sangatberguna. Suatu sistem mekanika yang didifinisikan stabil bila energinya tetap terbatas.Lyapunov mengembangkan ide ini, oleh karena itu teori yang muncul berkaitan denganmasalah tsb. menggunakan namanya.
Selanjutnya pembahasan difokuskan pada persamaan differensial invarian-waktu berben-tuk x(t) = Ax(t). Fungsi skalar V (x(t)) secara langsung tak-bergantung dengan t dandifinisikan sebagai
V (s(t))def= xT (t)Px(t)
untuk matriks definit-positif P dapat dipandang sebagai energi tergeneralisir dari sis-tem. Perhatikan bahwa suatu matriks dikatakan definit-positip bila matriks ini simetridan aTPa > 0 untuk semua vektor a dengan a 6= 0. Karena keinvarianan-waktu, makaV (x(t)) secara langsung tidak bergantung pada waktu t. Bila sistem stabil asimtotik, makaenergi harus menurun dengan bertambahnya waktu, oleh karena itu, derivatif
d
dtV (x(t)) = xT (t)Px(t) + xT (t)P x(t) = xT (t)[PA+ ATP ]x(t),
harus bernilai negatif. Jadi, bila Q def= −[PA+ATP ] definit-positif, maka energi menurun
dengan bertambahnya waktu. Bahkan akan ditunjukkan bahwa bila Q > 0, maka sistemstabil asimtotik, yaitu lim
t→∞V (x(t)) = 0.
Teorema 12 Semua nilai-karakteristik dari matriks A bagian realnya bernilai negatif biladan hanya bila untuk setiap matriks definit-positif Q, ada suatu matriks definit-positif Pyang memenuhi
ATP + PA = −Q (4.3)
Bukti Misalkan terdapat matriks P sedemikian hingga memenuhi (4.3), maka
V (x(t)) = xT (t)Px(t)
adalah tak-negatif dan merupakan fungsi turun asalkan
x(t) 6= 0 (sebabd
dtV (x(t)) < 0).
Jadi limt→∞
V (x(t)) dijamin ada. Hal ini berakibat bahwa ddtV (x(t)) menuju ke nol bila t
menuju ke takhingga. Maka dari itu limit berikut
limt→∞
xT (t)Qx(t) = 0,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

90 Sifat-sifat sistem..
selanjutnya dengan fakta bahwa Q > 0, maka haruslah limt→∞
x(t) = 0. Dengan menggunakan
Teorema 11 hasil limt→∞
x(t) = 0 berakibat bahwa semua nilai karakteristik dari matriks A
bagian realnya adalah negatif. Sebaliknya, bila semua nilai karakteristik dari A bagianrealnya bernilai negatif; diberikan matriks definit-positif Q, dipilih matriks P dengan
P =
∞∫
0
eAT tQeAtdt.
Nilai integral diatas ada, sebab matriks A stabil asimtotik yaitu Reλi < 0 untuk semua
nilai karakteristik λi dari matriks A. Selajutnya dengan mensubtitusikan P =∞∫
0
eAT tQeAtdt
diperoleh:
ATP + PA =
∞∫
0
AT eAT tQeAtdt+
∞∫
0
eAT tQeAtAdt
=
∞∫
0
[
AT eAT tQeAt + eA
T tQeAtA]
dt
=
∞∫
0
d
dt
[
eAT tQeAt
]
dt
= eAT tQeAt
∣
∣
∣
∞
0= −Q
�
Latihan 22 Sistem dengan input dan output tunggal mempunyai model keadaan:
x =
a b 0−b a 00 0 c
x, y = Cx.
Apakah sistem tsb. stabil jikaa). a = c = 0, b 6= 0. b). a < 0, c = 0.
Latihan 23 Diberikan persamaan keadaan berbentuk
x(t) = Ax(t)
dengan
A =
(
0 1−2 −3
)
dan x(t) =
(
x1(t)x2(t)
)
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kestabilan.. 91
Bila energi dari sistem diberikan oleh
V (x) =19
12x21 +
1
2x1x2 +
5
12x22.
Selidiki apakah energi ini menurun dengan bertambahnya waktu. Dari hasil ini selidikiapakah keadaan setimbang x(t) = 0 merupakan keadaan stabil. Selanjutnya tuliskan V (x)dalam bentuk V (x) = xTPx serta dV
dt= xT (−Q)x dan tunjukkan bahwa ATP +PA = −Q.
�
4.1.4 Kestabilan masukan-keluaran
Kestabilan masukan-keluaran merujuk pada akibat dari fungsi masukan. Ide dari jeniskestabilan ini dalah bila masukan dari sistem terbatas akan menghasilkan keluaran yangjuga terbatas. Kestabilan yang demikian dinamakan "kestabilan masukan-keluaran" Su-atu fungsi masukan u(.) dikatakan terbatas bila ada bilangan real konstan c sedemikianhingga berlaku ‖u(t)‖ ≤ c untuk semua t. Keluaran y(.) terbatas didifinisikan serupadengan keterbatasan masukan. Berikut ini diberikan definisi mengenai pengertian kesta-bilan keluaran-masukan yang selajutnya dinamakan stabil BIBO. BIBO artinya adalahBounded Input Bounded Output.
Definisi 4 Sistemx(t) = A(t)x(t) +B(t)u(t)y(t) = C(t)x(t) +D(t)u(t),
adalah BIBO bila untuk semua t0, dengan keadaan awal nol di t = t0, setiap masukan ter-batas pada [t0,∞) memberikan suatu keluaran yang terbatas pada [t0,∞). Sistem dikatakanstabil BIBO seragam bila ada suatu konstan k sedemikian hingga untuk semua t0, bilax(t0) = 0 dan ‖u(t)‖ ≤ 1 untuk semua t ≥ t0, maka ‖y(t)‖ ≤ k untuk semua t ≥ t0.Dalam hal ini jelas bahwa k tak bergantung pada x0.
Kestabilan BIBO sering dirujuk sebagai kestabilan luar (external stability), berbedadengan kestabilan asimtotik dari x(t) = A(t)x(t) yang sering dirujuk sebagai kestabilandalam (internal stability). Untuk sistem invarian waktu yaitu sistem dengan A,B,C danD adalah matriks-matriks konstan. Hal ini bisa ditunjukkan bahwa, suatu sistem adalah
stabil BIBO bila dan hanya bila∞∫
0
‖G(t)‖dt < ∞, dimana G(t) = CeAtB, yaitu respon
impuls dari sistem lepas dari suku tambahan Dδ(t). Perlu diperhatikan bahwa matriks Dtidak berperanan sebab kontribusinya tidak bisa menghasilkan suatu keluaran yang tak-terbatas bila masukannya terbatas. Juga bisa ditunjukkan bahwa bila suatu sistem stabildalam, maka ia stabil luar.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

92 Sifat-sifat sistem..
4.2 Keterkontrolan dan keteramatan
Pada bagian ini diberikan dua pengertian yang sangat penting dalam kajian suatu sistemlinear, yaitu pengertian tentang keterkontrolan dan keteramatan suatu sistem. Namumsebelumnya diperkenalkan munculnya sistem tak terkontrol dan/atau takteramti disertaibebeberapa alasannya melalui beberapa contoh.
Beberapa konsep-konsep ruang-keadaan dapat dipandang sebagai penafsiran ulang darikonsep-konsep yang mendahuluinya, yaitu konsep-konsep domain-frekuensi. Selain itu halkhusus dari metoda ruang-keadaan adalah keterkontolan dan keteramatan.
Ide-ide yang berkaitan dengan masalah keterkontrolan dan keteramatan telah diperke-nalkan oleh R.E. Kalman dipertengahan tahun 1950an sebagai suatu cara untuk men-erangkan mengapa metoda dari pendisainan kompensator sistem tak stabil menggunakanpenghapusan pole-pole tak stabil dengan zeros diseparuh bidang kompleks mengalami kega-galan walaupun proses penghapusan ini berjalan sempurnah. Masalah ini sudah diketahuibahwa metoda pengkompensatoran tsb. tidak fisibel sebab penghapusan yang sempurnahtsb. tidak mungkin dalam praktis. Disamping itu pada tahun 1954 Bergen dan Ragazzaitelah menunjukkan suatu penghapusan eksak secara matematik tidak akan mungkin dalamperangkat keras real. Kalman juga menunjukkan suatu penghapusan sempurnah pole-zerosuatu sistem tak stabil menghasilkan suatu fungsi transfer stabil. Tetapi fungsi transfer inimempunyai order lebih rendah dari sistem aslinya disamping itu mode takstabilnya tidakbisa dipengaruhi oleh masukan (tidak dapat dikontrol) atau taktampak dalam keluaran(tidak bisa diamati). Kajian mendalam secara matematik yang berkaitan dengan masalahketerkontrolan dan keteramatan bisa di lihat di (R.E. Kalman et al, 1974).
Bertolak belakang dengan keterkontrolan dan keteramantan, kajian ketakterkotrolandan ketakteramatan tampaknya kurang menarik. Hal ini tidaklah begitu benar. Parapraktisi sistem kontrol yang tidak memahami perbedaan pengertian "ketakterkontrolansistem untuk setiap nilai dari parameter-parameter" dan "sistem hampir selalu terkon-trol" bila mereka berhadapan dengan suatu proses tak-dikenalnya disajikan dalam ruangkeadaan yang hanya diberikan oleh data numerik, berdasarkan pengalamannya bisa jadi in-tuisinya menyimpulkan sistem yang dihadapinya adalah terkontrol atau teramatati. Tetapibila dikaji secara teliti kemungkinan besar bisa sebaliknya, yaitu sistem takterkontrol atautakteramati (Bernard Friedland, 1987). Pada bagian ini dikaji ulang pengertian tsb. yangdidahului dengan suatu contoh untuk memberikan suatu gambaran bahwa dalam anal-isa domain-frekuensi secara taklangsung diasumsikan sifat-sifat dinamik dari suatu sistemsecara lengkap dapat ditentukan oleh fungsi transfernya. Asumsi ini tidak selalu benar.Selanjutnya pada subbagian berikut ini diberikan beberapa contoh dan alasan penting darimana munculnya masalah ketakterkontrolan dan ketakteramatan.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keterkontrolan dan keteramatan.. 93
4.2.1 Ruang-bagian "keadaan" ditinjau dari masukan dan kelu-
aran
Pada bagian ini dibahas 4 ruang-bagian keadaan berdasar pada pengamatan masukan dankeluaran. Pembagian ini diberikan lewat contoh yang juga akan memberikan gambaranbahwa tidak selalu benar fungsi transfer dari suatu sistem menentukan secara lengkapperilaku dari sistemnya. Kajian yang agak lebih lengkap berkaitan dengan ruang bagiantakterkontrol dan takteramati dari suatu sistem akan diberikan pada bagian yang men-datang.
Contoh 30 Misalkan suatu sistem disajikan oleh sistem persamaan differensial berikut:
x1(t) = 2x1(t) + 3x2(t) + 2x3(t) + x4(t) + u(t)x2(t) = −2x1(t)− 3x2(t)− 2u(t)x3(t) = −2x1(t)− 2x2(t)− 4x3(t) + 2u(t)x4(t) = −2x1(t)− 2x2(t)− 2x3(t)− 5x4(t)− u(t)
(4.4)
dan persamaan pengamatan
y(t) = 7x1(t) + 6x2(t) + 4x3(t) + 2x4(t). (4.5)
Persamaan (4.4) dan (4.5) disajikan dalam bentuk persamaan matriks ruang keadaan se-bagai berikut:
x(t) = Ax(t) +Bu(t)y(t) = Cx(t),
}
(4.6)
dengan x(t) =(
x1(t) x2(t) x3(t) x4(t))
dan
A =
2 3 2 1−2 −3 0 0−2 −2 −4 0−2 −2 −2 −5
, B =
1−22−1
, C =(
7 6 4 2)
.
Fungsi transfer dari sistem (4.6) diberikan oleh
H(s) = C(sI −A)−1B =s3 + 9s2 + 26s+ 24
s4 + 10s3 + 35s2 + 50s+ 24. (4.7)
Bila pembilang dan penyebut dari fungsi transfer tsb difaktorkan, diperoleh:
H(s) =(s+ 2)(s+ 3)(s+ 4)
(s+ 1)(s+ 2)(s+ 3)(s+ 4)=
1
(s+ 1). (4.8)
Dari persamaan (4.8) terlihat bahwa ada 3 pole yang dihapus oleh 3 zeros yaitu s = −1, s =−3 dan s = −4. Jika diperhatikan fungsi transfer yang diberikan oleh persamaan (4.8),fungsi ini berkaitan dengan persamaan differensial tingkat satu. Hal ini tentunya berbeda
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

94 Sifat-sifat sistem..
dengan sistem aslinya yaitu sistem persamaan differensial tingkat empat sebagaimana yangdisajikan dalam persamaan (4.4).
Untuk memperjelas apa yang telah diperoleh, yaitu fungsi transfer dari sistem de-ngan realisasi berdimensi satu yang berbeda dengan sistem aslinya yaitu dimensi empatdilakukan transformasi variabel keadaan sebagai berikut:
x = Tx,
dengan
T =
4 3 2 13 3 2 12 2 2 11 1 1 1
dan T−1 =
−1 −1 0 0−1 2 −1 00 −1 2 −10 0 −1 2
.
Dengan transformasi T , matriks A menjadi matriks diagonal:
A = TAT−1 =
−1 0 0 00 −2 −0 00 0 −3 00 0 0 −4
,
sedangkan masing-masing matriks B dan C berubah menjadi:
B = TB =
1010
dan C = CT−1 =(
1 1 0 0)
.
Persamaan keadaannya menjadi:
˙x1 = −x1 + u˙x2 = −2x2˙x3 = −3x3 + u˙x4 = −4x4
(4.9)
dan keluaranya diberikan oleh persamaan:
y = x1 + x2. (4.10)
Dari persamaan (4.9) dan (4.10) dapat diterangkan sebagai berikut. Jelas bahwa masukanu hanya mempengaruhi variabel keadaan x1 dan x3, variabel x2 dan x4 tidak dipengaruhioleh masukan u. Keluaran y hanya bergantung pada variabel keadaan x1 dan x2, se-dangkan variabel keadaan x3 dan x4 tidak mempunyai kontribusi terhadap keluaran y.Jadi akibat transformasi kordinat, sistem mempunyai 4 sub-sistem yang berbeda. Dalamhal ini masing-masing sub-sistem hanya disajikan oleh persamaan tingkat satu. Keempatsub-sistem tsb. adalah:
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono
Keterkontrolan dan keteramatan.. 95
1. Variabel keadaan x1: dipengaruhi oleh masukan u, tampak pada keluran y.
2. Variabel keadaan x2: tidak dipengaruhi oleh masukan u, tampak pada masukan y.
3. Variabel keadaan x3: dipengaruhi oleh masukan u, tidak tampak pada keluaran y.
4. Variabel keadaan x4: tidak dipengaruhi oleh masukan u, tidak tampak pada keluarany.
Hanya sub-sistem pertama yang berkaitan dengan fungsi transfer H(s) =1
s+ 1. Disini ter-
lihat fungsi transfer ini tidak mendiskripsikan secara lengkap perilaku dari seluruh variabelkeadaan sistem. Subsistem pertama merupakan subsistem yang terkontrol dan teramati,subsistem kedua merupakan subsistem takterkontrol tapi teramati, subsistem ketiga meru-pakan subsistem yang terkontrol tapi takteramati sedangkan susbsistem keempat meru-pakan subsistem yang takterkontrol dan takteramatai. Jika suatu sistem memuat subsistemtakterkontrol atau takteramati, maka dikatakan sistem takterkontrol atau takteramati.
Dari contoh yang dikaji ini bisa disimpulkan; suatu sistem dengan masukan dan ke-luaran tunggal yang fungsi transfernya ditentukan oleh subsistem terkontrol dan teramatidengan dimensi lebih kecil dari dimensi ruang-keadaannya, maka dapat dipastikan sistemini memuat subsistem takterkontrol atau memuat subsistem takteramati.
Selanjutnya, pada bagian berikut ini diberikan beberapa contoh yang membahas darimana munculnya sistem takterkontrol atau takteramati.
4.2.2 Munculnya sistem takterkontrol atau sistem tak teramati
Contoh yang telah dikaji pada bagian sebelumnya merupakan suatu contoh sistem takterkontrol dan takteramati yang muncul dalam kajian akademik, bukan muncul dalamdunia nyata. Dalam kenyataannya sistem takterkontrol dan takteramati tidak semuamuncul dari kajian akademik sebagaimana yang akan diungkapkan pada bagian ini.
Redundansi variabel keadaan. Suatu hal yang biasa terjadi munculnya suatu sistemtakterkontrol adalah berkenaan dengan redundansi variabel keadaan. Sebagai contoh, su-atu sistem dinamik diberikan oleh:
x = Ax+Bu,
untuk beberapa alasan, misalkan didefinisikan suatu fariabel baru sebagai berikut:
z = Fx (4.11)
dimana F adalah suatu matriks berukuran n × k. Sehingga diperoleh suatu persamaandifferensial berikut:
z = F x = F (Ax+Bu).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

96 Sifat-sifat sistem..
Selanjutnya bila vektor
x =
(
xz
)
,
maka diperoleh persamaan differensial:
˙x = Ax+ Bu, (4.12)
dimana
A =
(
A 0FA 0
)
dan B =
(
BFB
)
.
Persamaan (4.12) dapat ditulis sebagai:
x = Ax+Buz = FAx+ FBu
}
. (4.13)
Pada persamaan (4.13) terlihat bahwa masukan u tampak pada variabel keadaan x danvariabel redundan keadaan z. Dalam hal ini kelihatannya sistem yang disajikan oleh per-samaan (4.12) atau persamaan (4.13) terkontrol, tetapi kenyataannya tidak. Untuk me-nunjukkan sistem (4.13) takterkontrol, dilakukan transformasi kordinat terhadap variabelkeadaan sebagai berikut:
(
xz
)
=
(
Ik 0−F In
)(
xz
)
, (4.14)
dimana masing-masing Ik dan In adalah matriks identitas dengan ukuran k×k dan n×n.Dari (4.14) didapat:
˙x = x = Ax+Bu˙z = −F x+ z = 0
}
(4.15)
Pada persamaan (4.15) terlihat bahwa masukan u hanya bisa mempengaruhi variabelkeadaan x sedangkan variabel redundan keadaan z tidak bisa dipengaruhi oleh masukanu. Dalam hal ini variabel z tidak akan bisa dikontrol oleh pengontrol apapun yang meru-pakan masukan dari sistem. Jadi sistem yang disajikan oleh persamaan (4.12) atau (4.13)takterkontrol. Dari kajian redundansi variabel keadaan ini tentu dipahami bahwa tak se-orangpun akan bermaksud menggunakan variabel keadaan yang lebih banyak dari jumlahminimum yang dibutuhkannya untuk mengetahui karakakteristik perilaku proses dinamik.Tetapi dalam suatu proses yang kompleks dengan fisis yang takdikenal para praktisi sistemkontrol bisa mungkin mempunyai kecenderungan menuliskan segala apa yang dipandangdan dikerjakannya kedalam persamaan differensial. Hal ini akan menghasilkan lebih banyakpersamaan dari yang dibutuhkan sehingga hasil model sistemnya merupakan sistem tak-terkontrol.
Dalam bagian berikut ini diberikan sifat suatu sistem linear invarian waktu yaituketerkontrolan dan keteramatan. Keterkontrolan dan ketermatan sistem ini merupakansuatu hal yang mendasar. Salah satu manfaat keterkontrolan suatu sistem dapat digu-nakan untuk penstabilan suatu sistem sebagaimana dalam bahasan berikut ini.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono
Keterkontrolan dan keteramatan.. 97
4.2.3 Keterkontrolan
Diberikan sistem linear invarian-waktu yang disajikan oleh persamaan:{
x(t) = Ax(t) +Bu(t)y(t) = Cx(t) +Du(t).
(4.16)
Definisi 5 Sistem linear (4.16) dikatakan terkontrol bila untuk setiap kedaan sebarangx(0) = x0 ada masukan u(t) yang tidak dibatasi mentransfer keadaan x0 kesebarangkeadaan akhir x(t1) = x1 dengan waktu akhir t1 hingga.
�
Dari pengertian sistem terkontrol yang diberikan dalam Definisi 5, hal ini berarti bahwabila diberikan sebarang keadaan awal x(0) dan sebarang keadaan akhir x(t1) akan selalu adapengontrol u(t) yang akan mentransfer keadaan awal x(0) ke keadaan akhir yang diinginkanx(t1) dalam waktu yang berhingga t1. Perlu diingat bahwa sebarang keadaan awal dansebarang keadaan akhir ini terdiri dari n komponen dan apa bila semua komponen darikeadaan awal ini bisa dikontrol ke n komponen yang sesuai keadaan akhir, maka sistembisa dikontrol. Sedangkan maksud dari keberadaan pengontrol u(t) yang tak dibatasiadalah tidak disyaratkan apa-apa kecuali hanya untuk mentransfer sebarang keadaan awalyang diberikan ke sebarang keadaan akhir yang diinginkan dalam waktu yang berhingga.Dalam kajian kontrol optimal pemilihan pengontrol u(t) ini merupakan pengontrol yangmentransfer keadaan awal ke keadaan akhir yang diinginkan dengan energi yang sekecilmungkin (minimum).
Penyelesaian dari x(t) = Ax(t) +Bu(t) diberikan oleh
x(t) = eAtx0 +
t∫
0
eA(t−τ)Bu(τ)dτ. (4.17)
Bila sistem terkontrol, yaitu ada masukan u(t) yang mentransfer x0 ke x1 dalam waktuberhingga t = t1. Dalam hal ini x1 diberikan oleh
x1 = eAt1x0 +
t1∫
0
eA(t1−τ)Bu(τ)dτ. (4.18)
Teorema berikut adalah memberikan syarat perlu dan cukup bahwa sistem (4.16) adalahterkontrol. Ada dua bagian dari Teorema ini, bagian yang pertama adalah untuk menjaminkeberadaan pengontrol u(t) untuk mentransfer sebarang keadaan awal ke sebarang keadaanakhir yang diinginkan dalam waktu berhingga sedangkan bagian yang kedua adalah untukmenjamin bahwa semua n komponen dari keadaan awal bisa dikontrol ke n komponen yangbersesuaian dari keadaan akhir yang diinginkan.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

98 Sifat-sifat sistem..
Teorema 13 Syarat perlu dan cukup sistem (4.16) terkontrol adalah:
1. w(0, t1) =t1∫
0
e−AτBBT e−AT τdτ non-singulir.
2. Matriks: Mc =(
B | AB | A2B | . . . | An−1B)
mempunyai rank sama den-gan n
Bukti1. Bila w(0, t1) non-singulir, diberikan sebarang keadaan awal x(0) = x0 dan keadaanakhir x1 pilih masukan
u(t) = −BT e−AT tw−1(0, t1)[
x0− e−At1x1]
. (4.19)
Dengan masukan ini dan digunakan persamaan (4.18), diperoleh:
x(t1) = eAt1x0 +
t1∫
0
eA(t1−τ)B{−BT e−AT tw−1(0, t1)
[
x0− e−At1x1]
}dτ
= eAt1x0 − eAt1
t1∫
0
e−AτBBT e−AT τdτ
w−1(0, t1)x0
+ eAt1
t1∫
0
e−AτBBT e−AT τdτ
w−1(0, t1)e−At1x1
= eAt1x0 − eAt1w(0, t1)w−1(0, t1)x0
+eAt1w(0, t1)w−1(0, t1)e
−At1x1
= eAt1x0 − eAt1x0 + x1
= x1.
Terlihat bahwa dengan masukan u(t) yang diberikan dalam (4.19) sebarang kedaan awalx0 ditransfer ke sebarang keadaan akhir x(t1) = x1. Jadi sistem terkontrol. Sebaliknya,andaikan w(0, t1) singulir tetapi sistem terkontrol. Maka untuk t1 > 0 pilih vektor α 6= 0sedemikian hingga
αTw(0, t1)α =
t1∫
0
αT e−AτBBT e−AT ταdτ = 0. (4.20)
Untuk setiap t dengan 0 < t ≤ t1 diperoleh:
αT e−AtB = 0. (4.21)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keterkontrolan dan keteramatan.. 99
Dari asumsi sistem terkontrol, maka untuk setiap keadaan awal x0 ada u(t) yang memenuhi(4.17), Oleh karena itu diperoleh:
x1 = eAt1x0 +
t1∫
0
eA(t1−τ)Bu(τ)dτ.
Jika kedua ruas persamaan diatas dikalikan dengan αT e−At1 , diperoleh:
αT e−At1x1 = αTx0 +
t1∫
0
αT e−AτBu(τ)dτ
= αTx0 +
t1∫
0
0u(τ)dτ
= αTx0
atauαT[
x0 − e−At1x1]
= 0.
Pilih x0 = e−At1x1 + α, maka diperoleh persamaan:
αT[
e−At1x1 + α− e−At1x1]
= 0
αTα = 0.
Dari persamaan terakhir diatas ini diperoleh α = 0 ini bertentangan dengan kenyataanα 6= 0. Jadi haruslah w(0, t1) non-singulir.
2. Asumsikan rank Mc = n, dan andaikan sistem tak-terkontrol. Karena sistem tak-terkontrol, maka w(0, t1) singulir. Jadi, diperoleh suatu persamaan yang serupa pada(4.21). Persamaan (4.21) diturunkan terhadap t sampai k kali, dengan k = 0, 1, 2, . . . , (n−1); dan pada t = 0 diperoleh:
αTAkB = 0, k = 0, 1, 2, . . . , (n− 1). (4.22)
Jadi:αT(
B | AB | A2B | . . . | A(n−1)B)
= αTMc = 0. (4.23)
Karena α 6= 0 maka rank Ktr < n. Hal ini bertentangan dengan kenyataan rank Mc =n. Jadi haruslah sistem terkontrol. Sebaliknya, asumsikan sistem terkontrol tetapi rankMc < n. dari asumsi, dipilih α 6= 0 yang memenuhi (4.23). Hal ini ekivalen dengan(4.22). Dari teorema "Hamilton-Cayley" A(n+1) dapat diuraikan sebagai kombinasi lineardari I, A,A2, . . . , A(n−1). Jadi e−At juga dapat diraikan sebagai kombinasi linear dari
I, A,A2, . . . , A(n−1),
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

100 Sifat-sifat sistem..
dari hal ini diperoleh:αTe−AtB = 0, 0 ≤ t ≤ t1, α 6= 0.
Oleh karena itu diperoleh:
0 =
t1∫
0
αT e−AtBBT e−AT tαdt = αTw(0, t1)α.
Karena α 6= 0, maka w(0, t1) singulir. Jadi sistem tak-terkontrol. Hal ini bertentengandengan asumsi sistem terkontrol. Jadi haruslah rank Mc = n.
Matriks terkontrol Mc diatas ditentukan oleh pasangan matriks (A,B), adakalanya jugadisebutt matriks terkontrol dari sistem dengan (A,B).
Contoh 31 Dibahas lagi contoh dinamika satelit yang diberikan pada sub-bagian 2.4.2Bila u1(t) dan u2(t) masing-masing menyatakan gaya radial dan gaya tangensial. Diperoleh:
r(t) = r(t)θ2(t)− g
r2(t)+ u1(t),
θ(t) = −2θ(t)r(t)
r(t)+
1
r(t)+ u2(t).
Ada penyelesaian setimbang r(t) = α, θ(t) = ωt dengan u(.) = u2(.) = 0, konstan α dan ωmemenuhi α3ω2 = g. Penyelesaian disekitar penyelesaian setimbang, memberikan:
x(t)
dt=
0 1 0 03ω2 0 0 2ω0 0 0 10 −2ω 0 0
x(t) +
0 01 00 00 1
u(t),
dimana
x(t) =
x1(t)x2(t)x3(t)x4(t)
=
r(t)− αx1(t)
α[θ(t)− ωt]x3(t)
.
Untuk ω = 1, didapat
A =
0 1 0 03 0 0 20 0 0 10 −2 0 0
dan
Mc =
0 0 1 0 0 2 −1 01 0 0 2 −1 0 0 −20 0 0 1 −2 0 0 −40 1 −2 0 0 −4 2 0
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keterkontrolan dan keteramatan.. 101
rank dari matriks Mc sama dengan 4. Jadi sistem terkontrol. Bila u1(t) ≡ 0, didapatmatriks terkontrol terhadap u2(t):
Mc2 =
0 0 2 00 2 0 −20 1 0 −41 0 −4 0
rank dari Mc2 = 4. Jadi sistem terkontrol. Bila u2(t) ≡ 0 sedangkan u1(t) sebarang,didapat matriks keterkontrolan terhadap u1(t):
Mc1 =
0 1 0 −11 0 −1 00 0 −2 00 −2 0 2
rank Mc1 = 3, jadi sistem tak-terkontrol.
Latihan 24 Selidiki apakah pasangan matriks berikut ini dapat dikontrol:
1 A =
(
1 00 2
)
, B =
(
11
)
.
2 A =
(
1 00 2
)
, B =
(
01
)
.
3 A =
(
1 00 1
)
, B =
(
12
)
.
4 A =
(
a1 0a2 0
)
, B =
(
11
)
.
5 A =
(
0 l−l 0
)
, B =
(
10
)
.
6 A =
λ 1 00 λ 10 0 λ
, B =
b1b2b3
.
7 A =
λ 0 00 λ 10 0 λ
, B =
b1b2b3
.
Latihan 25 Suatu sistem diberikan oleh persamaan berikut:
x(t) = Ax(t) +Bu(t)
y(t) = Cx(t),
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

102 Sifat-sifat sistem..
dengan
A =
(
−1 10 −2
)
, B =
(
01
)
dan C = (1 0).
Bila P =∫∞0eA
T tQeAtdt dengan matriks Q =
(
1 00 2
)
, maka:
a). Tunjukkan bahwa ATP + PA = −Q, jelaskan mengapa persamaan ini bisa dipenuhiuntuk matriks P dan Q seperti diatas.
b). Dapatkan pengontrol u(t) sehingga dengan pengontrol ini keadaan awal x(0) =
(
00
)
bisa dikontrol ke keadaan akhir x(1) =
(
12
)
, tunjukkan hal ini dalam perhitungan.
�
4.2.4 Keteramatan
Berikut ini diberikan suatu pengertian dari keteramatan dari suatu sistem; pengertian inimerupakan dual dari keterkontrolan.
Definisi 6 Bila setiap keadaan awal x(0) = x0 secara tunggal dapat diamati dari setiappengukuran keluaran sistem (4.16) dari waktu t = 0 ke t = t1, maka sistem dikatakan"teramati".
Istilah dual yang dikenalkan diatas kata ’terkontrol’ diganti dengan kata ’teramati’ ma-sukan u(t) diganti dengan keluaran y(t), yaitu dalam terminologi keterkontrolan sebarangkeadaan awal x0 dikontrol dengan suatu masukan u(t) ke sebarang keadaan akhir x1 di-mana 0 ≤ t ≤ t1 sedangkan dalam terminologi keteramatan sebarang keadaan awal x0lewat sebarang pengukuran keluaran y(t) diamati pada interval waktu 0 ≤ t ≤ t1.
Keluaran sistem (4.16) diberikan oleh:
y(t) = CeA(t)x0 + C
t∫
0
eA(t−τ)Bu(τ)dτ +Du(t). (4.24)
Bila diukur keluaran y(t) pada t = 0, maka diperoleh:
y(0) = Cx0 +Du(0). (4.25)
Terlihat keadaan awal x0 muncul dalam persamaan (4.25). Selanjutnya bila diukur kelu-aran y(t) pada ts dengan 0 < ts ≤ t1, diperoleh:
y(ts) = CeA(ts)x0 + Cts∫
0
eA(ts−τ)Bu(τ)dτ +Du(ts)
= Cx(ts) +Du(ts).
(4.26)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keterkontrolan dan keteramatan.. 103
Bila keadaan awal x0 dapat diamati, maka keadaan ini juga akan muncul pada pengukurankeluaran y(ts), yaitu
y(ts) = Cx0 +Du(ts). (4.27)
Sehingga dari persamaan (4.26) dan (4.27) diperoleh:
x0 = x(ts), dengan 0 < ts ≤ t1.
Berikut ini didefinisikan suatu matriks:
m(0, t) =
t∫
0
eAT τCTCeAτdτ. (4.28)
Bila diperhatikan matriks m(0, t) ini mempunyai bentuk yang hampir serupa dengan ma-triks w(0, t) yang muncul pada kajian keterkontrolan. Matriks A dalam m(0, t) munculsebagai −AT dalam w(0, t) sedangkan matriks C dalam m(0, t) muncul sebagai BT dalamw(0, t).
Selanjunya diberikan suatu pernyataan dalam suatu teorema berikut ini yang meny-atakan syarat perlu dan cukup suatu sistem teramati.
Teorema 14 Syarat perlu dan cukup sistem (4.16) teramati adalah:
1. Matriks m(0,t) pada (4.28) non-singulir.
2. Matriks keteramatan
Mo =
C−−CA−−CA2
−−...
−−CA(n−1)
mempunyai rank sama dengan n.
Seperti halnya matriksMc, adakalanya matriks keteramatanMo dinotasikan dengan (C,A).
Contoh 32 Tinjau lagi dinamika satelit;
A =
0 1 0 03 0 0 20 0 0 10 −2 0 0
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

104 Sifat-sifat sistem..
dan
C =
(
1 0 0 00 0 1 0
)
baris ke-1 matriks C menyatakan pengukuran jari-jari, sedangkan baris ke-2 dari C meny-atakan pengukuran sudut. Dalam hal ini diperoleh matriks keteramatan:
Mo =
1 0 0 00 1 0 00 1 0 00 0 0 13 0 0 20 −2 0 00 −1 0 0−6 0 0 4
dengan rank Mo = 4. Jadi sistem teramati. Selanjutnya hanya yi(t) (i = 1 atau 2) dapatdiukur; didapat:
Mo1 =
1 0 0 00 1 0 03 0 0 20 −1 0 0
dengan rank Mo1 = 3, jadi sistem tak-teramati; dan
Mo2 =
0 1 0 00 0 0 10 −2 0 0−6 0 0 4
.
dengan rank Mo2 = 4, jadi sistem teramati.
Latihan 26 Selidiki apakah sistem dalam pendulum terbalik dapat diamati. Lakukan lagipenyelidikan bila hanya y1(t) atau y2(t) yang tersedia untuk diukur.
�
4.2.5 Ruang-bagian terkontrol dan teramati
Pada pembahasan keterkontrolan dan keteramatan sebagaimana yang telah dibahas padadua bagian sebelumnya keduanya erat kaitannya dengan keadaan awal x(0) = x0. Jadidalam hal sistem terkontrol mempunyai arti bahwa semua komponen (n komponen) darivektor x(0) harus bisa dikontrol, bila ada setidaknya satu komponen dari x(0) yang tidakbisa dikontrol ini sudah menyatakan bahwa sistem tak-terkontrol. Begitu juga halnya bilaada setidaknya satu komponen dari x(0) yang tidak dapat ditentukan dari pengukurankeluaran sistem maka dikatakan sistem tidak bisa diamati.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keterkontrolan dan keteramatan.. 105
Pada bagian ini dikaji pengelompokan semua komponen dari x(0) yang terkontrol, be-gitu juga yang teramati. Untuk maksud ini dibutuhkan suatu transformasi linear yang akanmentransformasi sistem yang ada ke bentuk sistem linear yang lain. Transformasi linearini tidak akan mengubah sifat-sifat sistem yang asli; misalnya saja bila sistem terkontrol,maka hasil sistem yang dilakukan transformasi linear tetap terkontrol.
Telah dikenal dari teori matriks bahwa bila suatu "ruang bagian linear" V ⊂ Rn adalahinvarian-A, maka bisa didapatkan suatu basis (a1, a2, . . . , an) dari Rn sedemikian hinggaspan{a1, a2, . . . , an}−dimV = k < n; selajutnya dengan basis ini pemetaan A mempunyaibentuk
A =
A1,1 | A1,2
. . . . . . . . .0 | A2,2
l k
l n− k↔ ↔k n− k
(4.29)
Basis yang disebutkan diatas bisa didapatkan dengan prosedur Gram-Schmidt. Kesimpulandisini adalah bila
dim(Im Mc) = k < n,
maka bisa didapat suatu basis (a1, a2, . . . , an) dari Rn sedemikian hingga
Im Mc = span{a1, a2, . . . , ak};
dengan basis tsb. matriks A mempunyai bentuk (4.29). Karena Im B ∈ Im Mc, makadengan basis baru tsb. B mempunyai bentuk
B =
B1
. . .0
l k
l n− k↔m
(4.30)
Dengan basis tsb. matriks terkontrol mempunyai bentuk:
Mc =(
B | AB | . . . | A(n−1)B)
=
B1 | A1,1B1 | . . . | A(n−1)1,1 B1
−− −− −− −− −− −− −−0 0 | 0 | . . . 0
dan rank (B1|A1,1B1| . . . |A(n−1)1,1 B1) = k, jadi pasangan (A1,1, B1) terkontrol. Dalam hal
ini mempunyai arti bahwa pada sistem yang asli sebanyak k komponen dari keadaan awalx(0) = x0 yang bisa dikontrol sedangkan sisanya tidak.
Pemilihan basis baru adalah ekivalen dengan memperlakukan suatu transformasi basis.Maka dari itu ada suatu matriks T yang punya invers sedemikian hingga T−1AT dan T−1Bmasing-masing mempunyai bentuk (4.29) dan (4.30)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

106 Sifat-sifat sistem..
Dengan cara serupa bila dim(Ker Mo) = k < n, maka bisa didapat suatu basis(a1, a2, . . . , an) dari Rn sedemikian hingga
Ker Mc = span{a1, a2, . . . , ak};dengan basis tsb. matriks A mempunyai bentuk:
A =
A1,1 | A1,2
. . . . . . . . .0 | A2,2
l k
l n− k↔ ↔k n− k
(4.31)
Matriks A pada persamaan ini secara umum berbeda dengan (4.29). Karena Ker C ∈Ker Mo, maka dengan basis baru tsb. C mempunyai bentuk
C =(
0 | C1
)
↔ ↔k n− k
(4.32)
Dengan basis tsb. matriks teramati mempunyai bentuk:
Mo =
C−−CA−−...
−−CA(n−1)
=
0 | C1
−− | −−0 | C1A2,2
−− | −−... | ...
−− | −−0 | C1A
(n−1)2,2
(4.33)
dimana
rank
C1
−−C1A2,2
−−...
−−CA
(n−1)2,2
= k
jadi pasangan (C1, A2,2) teramati.
Contoh 33 Diberikan pasangan matriks
A =
0 1 0 03 0 0 20 0 0 10 −2 0 0
, B =
0100
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keterkontrolan dan keteramatan.. 107
Matriks terkontrol (A,B) pada contoh ini sama dengan matriks Mc1 pada contoh ter-dahulu. Telah ditahu bahwa sistem tak-terkontrol sebab rank Mc1 = 3. Dari matriks Mc1
didapatkan tiga vektor bebas linear yang membangun Im Mc1, yaitu:
0100
,
100−2
,
0−1−20
.
Vektor ke-4 dipilih sehingga bebas linear terhadap ketiga vektor tsb. Dipilih vektor ke-4sebagai:
2001
.
Didapat transformasi linear T sebagai berikut:
T =
0 1 0 21 0 −1 00 0 −2 00 −2 0 1
dan invers dari matriks T adalah:
T−1 = 0.1×
0 10 −5 02 0 0 −40 0 −5 04 0 0 2
sedangkan T−1AT dan T−1B masing-masing diberikan oleh:
A = T−1AT =
0 0 0 | 7.51 0 −0.5 | 00 1 0 | −0.5
−− −− −− | −−0 0 0 | 0
dan
B = T−1B =
100
−−0
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

108 Sifat-sifat sistem..
Partisi matriks A dan B masing-masing berdasarkan (4.29) dan (4.30), dengan pasangan(A1,1, B1) diberikan oleh:
A1,1 =
0 0 01 0 −0.50 1 0
, B1 =
100
.
Pasangan (A1,1, B1) terkontrol sebab,
rank
1 0 00 1 00 0 1
= 3.
Latihan 27 Tulis pasangan terkontrol dalam Latihan 24 kedalam bentuk persamaan (4.29)dan (4.30).
�
4.3 Dualitas keterkontrolan dan keteramatan
Pada bagian ini dibahas dualitas dari keterkontrolan dan keteramatan. Dualitas disinidiartikan bahwa sifat-sifat yang ada dalam keterkontrolan bisa diperoleh dari sifat-sifatyang ada dalam keteramatan dengan menggunakan konsep dualitas dan sebaliknya jugaberlaku demikian. Selajutnya akan diberikan dualitas dari keterkontrolan dan keteramatandalam teorema berikut.
Teorema 15 (A,B) terkontrol bila dan hanya bila (BT , AT )teramati. (C,A) teramati bila dan hanya bila (AT , CT ) terkontrol.
Bukti
(A,B) terkontrol ⇔ rank[B|AB| . . . |A(n−1)B] = n
⇔ rank[B|AB| . . . |A(n−1)B]T = n
⇔ rank
BT
−−−−BTAT
−−−−...
−−−−BT (AT )(n−1)
= n
⇔ (BT , AT ) teramati
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bentuk kompanion terkontrol dan teramati.. 109
Bukti bagian kedua serupa.
�
Kesimpulan dari teorema diatas adalah x(t) = Ax(t)+Bu(t) terkontrol bila dan hanyabila sistem z(t) = AT z(t), y(t) = BT z(t) teramati. Matriks transpose A → AT , B → BT
adalah contoh sederhana dari konsep "dualitas".Ruang dual dari Rn terdiri dari semua fungsi linear c : Rn 7→ R yang merupakan
himpunan dari vektor-vektor berdimensi n. Ruang dual ditulis sebagai (Rn)∗, dimanadalam contoh yang dikaji sebelumnya adalah R
n sendiri. Bila A : Rn 7→ R
n adalahpemetaan linear, maka AT adalah pemetaan linear dari (Rn)∗ ke (Rn)∗.
4.4 Bentuk kompanion terkontrol dan teramati
Pada bagian ini dibahas suatu bentuk yang dinamakan bentuk "kompanion". Bentukkompanion ini bermanfaat terutama untuk masalah penempatan pole-pole yang sesuai di-inginkan sehingga sistem loop-tutup "terstabilkan". Masalah ini akan dibahas pada bagianberikutnya. Selain dari pada itu pada bagian ini juga akan dimanfaatkan sifat dualitas dariketerkontrolan dan keteramatan untuk memperoleh bentuk kompanion teramati lewat ben-tuk kompanion terkontrol.
Diberikan suatu sistem masukan-tunggal keluaran-tunggal:
x(t) = Ax(t) +Bu(t)y(t) = Cx(t)
}
(4.34)
dan ditentukan suatu transformasi:
x(t) = Px(t), P matriks konstan non− singulir (4.35)
sehingga dengan transformasi ini, sistem (4.34) ditransformasi menjadi:
˙x(t) = Ax(t) + Bu(t)y(t) = Cx(t)
}
, (4.36)
dimana
A = PAP−1, B = PB dan C = CP−1.
Berikut ini diberikan suatu teorema yang berkenaan dengan bentuk "kompanion terkon-trol", bila sistem (4.34) terkontrol.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

110 Sifat-sifat sistem..
Teorema 16 Bila sistem (4.34) terkontrol, maka sistem tsb. bisa ditransformasi kebentuk:
˙x(t) =
0 1 0 . . . 0 00 0 1 . . . 0 00 0 0 . . . 0 0.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
0 0 0 . . . 0 1−αn −αn−1 −αn−2 . . . −α2 −α1
x(t) +
000.
.
.
01
u(t)
y(t) =[
βn βn−1 βn−2 . . . β2 β1]
x(t)
(4.37)
dimana α1, α2, . . . , αn adalah koefisien-koefisien dari polinomial karakteristik matriks A.
BuktiSistem (4.34) terkontrol, maka vektor-vektor B,AB, . . . , A(n−1)B bebas linear. Dibentuksuatu basis sebagai berikut:
qndef= B
qn−1def= Aqn + α1qn = AB + α1B
qn−2def= Aqn−1 + α2qn = A2B + α1AB + α2B (4.38)...
q1def= Aq2 + αn−1qn = A(n−1)B + α1A
(n−2)B + . . .+ αn−1B
Selanjutnya dari (4.38) diperoleh:
Aq1 = (An + α1A(n−−1) + . . .+ αn−1A+ αnI)B − αnB
= −αnB = −αnqn = (q1 q2 . . . qn−1 qn)
00...0
−αn
Aq2 = q1 − αn−1qn = (q1 q2 . . . qn−1 qn)
10...0
−αn−1
............................................................................
Aqn = qn−1 − α1qn = (q1 q2 . . . qn−1 qn)
00...1
−α1
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bentuk kompanion terkontrol dan teramati.. 111
atau:
(q1 q2 . . . qn−1 qn)−1Aq1 =
00...0
−αn
(q1 q2 . . . qn−1 qn)−1Aq2 =
10...0
−αn−1
..................................................................
(q1 q2 . . . qn−1 qn)−1Aqn =
00...1
−α1
Dari hasil diatas diperoleh:
Q−1AQ =
0 1 0 . . . 0 00 0 1 . . . 0 00 0 0 . . . 0 0...
......
......
0 0 0 . . . 0 1−αn −αn−1 −αn−2 . . . −α2 −α1
= A,
dimana Q = (q1 q2 . . . qn−1 qn). Sehingga bila dilakukan suatu transformasi seperti yangdiberikan pada (4.35), dimana P = Q−1 diperoleh:
˙x = Ax(t) + Bu(t)y(t) = Cx(t)
}
,
dimana A = PAP−1 dan B = PB dengan
A =
0 1 0 . . . 0 00 0 1 . . . 0 00 0 0 . . . 0 0...
......
......
0 0 0 . . . 0 1−αn −αn−1 −αn−2 . . . −α2 −α1
, (4.39)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

112 Sifat-sifat sistem..
B =
000...01
(4.40)
danC = CQ =
[
βn βn−1 βn−2 . . . β2 β1]
. (4.41)
Bentuk (4.37) dinamakan bentuk kompanion terkontrol. Telah dijelaskan bahwa bentukkompanion terkontrol ini diperoleh dari transformasi x = Q−1x, dimana matriks Q dapatdiperoleh dari persamaan (4.35). Matrik Q juga bisa didapat sebagai berikut. Misalkan
R = [B AB A2B . . . An−1B]
danR = [B AB A2B . . . An−1B]
atau
R = [B AB A2B . . . An−1B]
= [I A A2 . . . An−1]B
= [Q−1Q Q−1AQ Q−1A2Q . . . Q−1An−1Q](Q−1B)
= Q−1[I A A2 . . . An−1]Q(Q−1B)
= Q−1[I A A2 . . . An−1]B
= Q−1[B AB A2B . . . An−1B]
= Q−1R ⇒ Q = RR−1.
Dengan A dan B masing-masing diberikan oleh persamaan (4.39) dan (4.40), maka dapatditunjukkan bahwa matriks R−1 diberikan oleh
R−1 =
αn−1 αn−2 . . . α1 1αn−2 αn−3 . . . 1 0
......
. . ....
...α1 1 . . . 0 01 0 . . . 0 0
. (4.42)
Selanjutnya diberikan suatu teorema yang merupakan "dual" dari teorema (16) yaitubentuk kompanion teramati.
Teorema 17 Bila sistem masukan-tunggal keluran tunggal{
x(t) = Ax(t) +Bu(t)y(t) = Cx(t)
(4.43)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bentuk kompanion terkontrol dan teramati.. 113
teramati, maka sistem ini dapat ditransformasi menjadi bentuk kompanion teramati yangdiberikan oleh:
˙x(t) =
0 0 0 . . . 0 −αn
1 0 0 . . . 0 −αn−1
0 1 0 . . . 0 −αn−2...
......
......
0 0 0 . . . 0 −α2
0 0 0 . . . 1 −α1
x(t) +
βnβn−1
βn−2...β2β1
u(t)
y(t) =(
0 0 0 . . . 0 1)
x,
dimana α1, α2, . . . , αn adalah koefisien-koefisien dari polinomial karakteristik matriks A.
BuktiKarena sistem (4.43) teramati, maka berdasarkan Teorema 15 sistem dual
{
x(t) = ATx(t) + CTu(t)y(t) = BTx(t)
(4.44)
terkontrol. Jadi dari hasil Teorema 16, ada matriks P non-singulir sedemikian hingga
PATP−1 =
0 1 0 . . . 0 00 0 1 . . . 0 00 0 0 . . . 0 0...
......
......
0 0 0 . . . 0 1−αn −αn−1 −αn−2 . . . −α2 −α1
, (4.45)
PCT =
000...01
(4.46)
dan
BTP−1 =[
βn βn−1 βn−2 . . . β2 β1]
(4.47)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

114 Sifat-sifat sistem..
atau didapat sistem yang diberikan oleh
˙z(t) =
0 1 0 . . . 0 00 0 1 . . . 0 00 0 0 . . . 0 0...
......
......
0 0 0 . . . 0 1−αn −αn−1 −αn−2 . . . −α2 −α1
z(t) +
000...01
u(t)
y(t) =[
βn βn−1 βn−2 . . . β2 β1]
z(t)
. (4.48)
Sistem (4.48) adalah terkontrol dualitas dari sistem ini adalah teramati yang dilakukandengan mentranspose tiga persamaan matriks (4.45), (4.46) dan (4.47), diperoleh:
(P−1)TAP T =
0 0 0 . . . 0 −αn
1 0 0 . . . 0 −αn−1
0 1 0 . . . 0 −αn−2...
......
......
0 0 0 . . . 0 −α2
0 0 0 . . . 1 −α1
= QAQ−1,
CP T =(
0 0 0 . . . 0 1)
= CQ−1
dan
(P−1)TB =
βnβn−1
βn−2...β2β1
= QB,
dimana Q = (P−1)T . Jadi dengan transformasi x(t) = Qx(t) sistem teramati (4.43)menjadi:
{
˙x(t) = QAQ−1x(t) +QBu(t)y(t) = CQ−1x(t)
(4.49)
atau
˙x(t) =
0 0 0 . . . 0 −αn
1 0 0 . . . 0 −αn−1
0 1 0 . . . 0 −αn−2...
......
......
0 0 0 . . . 0 −α2
0 0 0 . . . 1 −α1
x(t) +
βnβn−1
βn−2...β2β1
u(t)
y(t) =(
0 0 0 . . . 0 1)
x,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bentuk kompanion terkontrol dan teramati.. 115
�
Masing-masing sistem (4.43) dan (4.49) adalah teramati dan sistem (4.49) didapat darisistem (4.43) dengan melakukan suatu transformasi x(t) = Qx(t). Bila masing-masingmatriks keteramatan dari kedua sistem ini diberikan oleh
W =
CCACA2
...CAn−1
dan W =
CQ−1
CQ−1(QAQ−1)CQ−1(QA2Q−1)
...CQ−1(QAn−1Q−1)
,
maka
W =
CQ−1
CQ−1(QAQ−1)CQ−1(QA2Q−1)
...CQ−1(QAn−1Q−1)
=
CCACA2
...CAn−1
Q−1 = WQ−1.
JadiW = WQ−1 ⇒ Q = W−1W.
Dapat ditunjukkan bahwa matriks W−1 diberikan oleh matriks yang sama dalam per-samaan (4.42), yaitu
W−1 =
αn−1 αn−2 . . . α1 1αn−2 αn−3 . . . 1 0
......
. . ....
...α1 1 . . . 0 01 0 . . . 0 0
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

116 Sifat-sifat sistem..
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bab 5Umpan balik keadaan dan keluaran
Pada bagian 1.1 dalam contoh tentang auto pilot suatu boat, pengontrol u(t) diungkapkandalam besaran-besaran sebagaimana yang dikenal untuk memperoleh perilaku kemudi yangbaik dari kapal. Salah satu hukum pengnontrol yang telah diperkenalkan adalah u(t) =Ke(t), dimana K adalah suatu konstan, e(t) kesalahan diantara a yang sebenarnya dan aeyang diinginkan. Dalam hal ini ae yang diinginkan sudah diatur oleh juru-mudi, sedangkana yang merupakan suatu signal keluaran dari dinamika sistem secara sinambung diukur.Dengan demikian saat pengendali normal yaitu ketika auto-pilot tidak digunakan olehjuru-mudi; juru mudi tahu mengenai a dan ae pada saat pengamatan dan membuat koreksisesuai yang diinginkan bila terjadi diviasi. Pada situasi tsb. keluaran (pengukuran-peng-ukuran) diumpan balikan ke masukan u(t); pengontrol yang demikian dinamakan kontrolumpam-balik atau ekivalen sebagai kontrol loop-tutup. Dalam sistem kontrol loop-tutup, keluaran dihubungkan dengan masukan sistem akan dalam hal ini sistem secaraotomatis memerintah dengan sendirinya. Kebalikan dari sistem loop-tutup adalah sistemloop-buka, dalam hal ini pengontrol u(t) tidak dipengaruhi oleh keluaran.
Suatu sistem pemanggang roti otomatis yaitu suatu pemanggang roti yang bisa padamsecara otomatis adalah salah satu contoh dari sistem kontrol loop-buka. Dalam hal inisistem di kontrol oleh "timer" (fungsi u(t), suatu fungsi "on-off"). Waktu untuk mem-buat roti yang bagus harus diestimasi oleh pemakai yang bukan suatu bagian dari sistem.Pengontrolan atas mutu (misalnya saja warna roti) yang merupakan keluaran diatur olehtimer, untuk hal ini dapat didisain suatu pemanggang roti sebagai sistem umpan balik,warna dari roti secara sinambung diukur dan pengukuran ini dihubungkan dengan "switch"dari elemen pemanas.
Kembali pada keperluan yang lebih matematis mengenai prinsip umpan balik. Misalkansuatu sistem diuraikan oleh:
x(t) = Ax(t) +Bu(t)
y(t) = Cx(t) +Du(t)
dimana sistem tidak stabil. Juga diasumsikan C = I dan D = 0, yaitu keseluruhan
117

118 Umpan balik keadaan dan keluaran..
keadaan teramati. Untuk memfokuskan ide, digunakan contoh pada pendulum terbalikyang telah dibahas pada sub-bagian 2.4.1. Misalkan ada gangguan awal x0 6= 0 (x0 = 0berhubungan dengan kesetimbangan tidak stabil dari kereta yang tidak bergerak padasituasi yang diberikan saat pendulum tegak, dapat ditentukan suatu fungsi u(.); [t,∞) 7→ R
sedemikian hingga penyelesaian dari x(t) = Ax(t) +Bu(t), x(0) = x0 akan konvergen ke 0kalua t→ ∞. Suatu pengontrol yang demikian (loop-tutup) sangat tidak praktis. Karenagangguan mendatang tidak terjaga. Sebagai pengganti dapat diberikan suatu umpan baliklinear berbentuk
u(t) = Fx(t), (5.1)
dimana F suatu matriks m × n (pada contoh pendulum terbalik adalah 1 × 4). Keadaanx(t) memenuhi:
x(t) = Ax(t) +Bu(t) = (A +BF )x(t). (5.2)
Matriks F dipilih sedemikian hingga sistem loop-tutup (5.2) mempunyai suatu perilakuyang diinginkan, misalnya stabil asimtotik. Suatu umpan balik yang diberikan oleh (5.1)dinamakan umpan balik keadaan. Bila umpan balik keadaan tidak digunakan, alternatifyang lainnya adalah umpan balik keluaran u = Hy(t), dimana H suatu matriks sesuaipilihan berukuran m× p. Keadaan x(t) akan memenuhi:
x(t) = Ax(t) +BHy(t) = (A+BHC)x(t).
Suatu pengontrol yang demikian disebut umpan balik keluaran. Masukan u(t) = Fx(t)adalah suatu hukum kontrol, bila dipandang sebagai suatu sistem tersendiri (statik) den-gan x(t) sebagai masukan dan u(t) sebagai keluaran, hukum kontrol ini disebut hukumkompensator statik.
5.1 Umpan balik dan terstabilkan
Melaui suatu kompensator pengaruh dinamik dari suatu sistem bisa dipengaruhi. Di-inginkan untuk menggunakan pengaruh ini untuk menstabilkan sistem disekitar titik kese-timbangan tak-stabil. Penstabilan merupakan pokok bahasan pada bagian ini, walaupunada sifat-sifat sistem yang lain yang dapat dipengaruhi oleh suatu kompensator. Kondisipada matriks A dan B akan diberikan sedemikian hingga matriks A+BF stabil asimtotikbila matriks F dipilih sesuai dengan apa yang diinginkan.
Definisi 7 Sistem x(t) = Ax(t) +Bu(t) bisa distabilkan bila ada suatu matriks F ukuranm× n sedemikian hingga semua nilai-karakterisrik λ dari matriks A+BF , ℜ(λ) < 0.
Berikut ini diberikan suatu teorema yang memberikan syarat suatu sistem bisa distabilkan.
Teorema 18 Sistem x(t) = Ax(t) + Bu(t) terkontrol bila dan hanya bila untuk setiappolinomial
p(λ) = λn + p1λ(n−1) + p2λ
(n−2) + . . .+ pn,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Umpan balik dan terstabilkan.. 119
dengan koefisien pi real, ada matriks F ukuran m × n sedemikian hingga det[λI − (A +BF )] = p(λ)
BuktiAsumsikan bahwa untuk setiap sebarang p(λ) yang mempunyai bentuk seperti diberikandalam teorema ada suatu matriks F sedemikian hingga det[λI − (A + BF )] = p(λ) danandaikan sistem x(t) = Ax(t) + Bu(t) tak-terkontrol. Maka ada basis di Rn sedemikianhingga:
A =
(
A1,1 A1,2
0 A2,2
)
, B =
(
B1
0
)
(5.3)
Bila dipartisi sebarang matriks umpan-balik F sebagai (F1 F2), maka
A+BF =
(
A1,1 A1,2
0 A2,2
)
+
(
B1
0
)
(F1 F2)
=
(
A1,1 +B1F1 A1,2 +B1F2
0 A2,2
)
.
Gunakan bentuk persamaan berikut(
P Q0 R
)
=
(
P 00 I
)(
I P−1QR−1
0 I
)(
I 00 R
)
untuk menentukan polinomial karakteristik dari matriks
(A +BF ),
yaitu:
det[λI − (A+BF )] = det
(
λI − (A1,1 +B1F1) −(A1,2 +B1F2)0 λI −A2,2
)
= det(K) det(L) det(M),
dengan matriks K,L dan M masing-masing adalah
K =
(
λI − (A1,1 +B1F1) 00 I
)
,
L =
(
I [λI − (A1,1 +B1F1)]−1[A1,2 +B1F2][λI − A2,2]
−1
0 I
)
dan
M =
(
I 00 λI − A2,2
)
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

120 Umpan balik keadaan dan keluaran..
Sehingga diperoleh
det[λI − (A+BF )] = det[λI − (A1,1 +B1F1)] det[λI − A2,2]
Terlihat bahwa apapun pilihan terhadap F , polinomial dari det[λI−A2,2] tidak bisa dipilihsebarang dan polinomial ini selalu merupakan suatu bagian dari polinomial karakteristikdari matriks (A + BF ). Akibatnya polinomial karakteristik dari matriks (A + BF ) tidakakan bisa dipilih sebarang. Hal ini kontradiksi dengan kenyataan asumsi. Jadi haruslahsistem x(t) = Ax(t) +Bu(t) terkontrol.
Sebaliknya, asumsikan (A,B) terkontrol. Akan ditunjukkan bahwa untuk setiap poli-nomial p(λ) = λn + p1λ
(n−1) + p2λ(n−2) + . . .+ pn ada tunggal suatu matriks F sedemikian
hingga det[λI−(A+BF )] = p(λ). Sistem (A,B) terkontrol, maka berdasarkan Teorema 16A dan B mempunyai bentuk kompanion:
A =
0 1 0 . . . 0 00 0 1 . . . 0 00 0 0 . . . 0 0...
......
......
0 0 0 . . . 0 1−αn −αn−1 −αn−2 . . . −α2 −α1
dan B =
000...01
.
Pilih F = (αn − pn αn−1 − pn−1 . . . α1 − p1), maka
A+BF =
0 1 0 . . . 0 00 0 1 . . . 0 00 0 0 . . . 0 0...
......
......
0 0 0 . . . 0 1−αn −αn−1 −αn−2 . . . −α2 −α1
+
000...01
(αn − pn αn−1 − pn−1 . . . α1 − p1)
=
0 1 0 . . . 0 00 0 1 . . . 0 00 0 0 . . . 0 0...
......
......
0 0 0 . . . 0 1−pn −pn−1 −pn−2 . . . −p2 −p1
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Umpan balik dan terstabilkan.. 121
Dari hasil diatas diperoleh
det[λI − (A+BF )] = λn + p1λ(n−1) + p2λ
(n−2) + . . .+ pn = p(λ).
�
Teorema 18 menyatakan bahwa bila (A,B) terkontrol, polinomial karakteristik dari (A +BF ) bisa dipilih sebarang untuk suatu pilihan F yang sesuai. Maka dari itu "zeros" daripolinomial karakteristik yang identik dengan nilai-karakteristik dari matriks A+BF dapatdiletakkan pada setiap lokasi sesuai dengan yang dikehendaki. Suatu lokasi khusus adalahseparoh bidang kompleks sebelah kiri sedemikian hingga x(t) = (A+BF )x(t) stabil asim-totik. Suatu kesimpulan dari Teorema 18 adalah bila x(t) = Ax(t)+Bu(t) terkontrol makaterstabilkan (kebalikan pernyataan ini tidak benar). Teorema 18 adakalanya dinamakan"pole assignment".
Contoh 34 Diberikan sistem(
x1(t)x2(t)
)
=
(
−1 00 1
)(
x1(t)x2(t)
)
+
(
01
)
u(t).
Sistem tak-terkontrol. Bilih dipilih
u(t) = (0 − 2)
(
x1(t)x2(t)
)
diperoleh sistem loop-tutup(
x1(t)x2(t)
)
=
(
−1 00 −2
)(
x1(t)x2(t)
)
.
Terlihat bahwa sistem loop-tutup stabil asimtotik. Contoh ini menunjukkan bahwa walaupunsistem tak-terkontrol tapi sistem bisa distabilkan.
�
Contoh 35 Kembali pada Contoh 8 pendulum terbalik. Hasil pelinearan disekitar peye-lesaian sama denagn nol serta dengan memberikan nilai-nilai tertentu pada beberapa kon-stanta yang tidak diketahui, matriks A dan B masing-masing diberikan oleh
A =
0 1 0 025 0 0 00 0 0 1
−0.6 0 0 0
dan B =
0−2.401
Dapat dicek bahwa sistem terkontrol. Polinomial karakteristik dari A adalah λ4 − 25λ2,dari polinomial ini terlihat bahwa salah satu nilai karakteristik dari A sama dengan 5, jadi
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

122 Umpan balik keadaan dan keluaran..
sistem tak-stabil. Misalkan diinginkan memilih umpan balik F supaya nilai-karakteristikdari A +BF adalah: −1,−2 dan −2± i, dalam hal ini polinomial p(λ) diberikan oleh:
(λ+ 1)(λ+ 2)(λ2 + 4λ+ 5) = λ4 + 7λ3 + 19λ2 + 23λ+ 10.
Misalkan F = (f1 f2 f3 f4), maka diperoleh suatu persamaan yang diberikan oleh:det[λI − (A+BF )] = p(λ). Tetapi
det[λI − (A+BF )] = det
λ −1 0 0−25 + 2.4f1 λ+ 2.4f2 2.4f3 2.4f4
0 0 λ −10.6− f1 −f2 −f3 λ− f4
= λ4 + (2.4f2 − f4)λ3 + (−f3 − 25 + 2.4f1)λ
2
+(25f4 − 1.44f4)λ+ (25f3 − 1.44f3).
Dengan menyamakan koefisien-koefisien yang bersesuaian dari polinomial det[λI−(A+BF )] dan p(λ) diperoleh:
f3 =10
23.56, f4 =
23
23.56, f1 =
1
2.4
[
44 +10
23.56
]
,
dan
f2 =1
2.4
[
7 +23
23.56
]
.
�
Contoh 36 Diberikan sistem dalam bentuk kanonik terkontrol:
x(t) =
0 1 00 0 12 −3 1
x(t) +
001
u(t).
Bila masukan dipilih sebagai u(t) = (f1 f2 f3)x(t). Untuk nilai fi, i = 1, 2, 3 yang manasistem loop-tutup stabil asimtotik?Dari hukum umpan balik yang diberikan menghasilkan:
x(t) =
0 1 00 0 1
2 + f1 −3 + f2 1 + f3
x(t).
Polinomial karakteristik dari matriks sistem ini adalah:
λ3 + (−1− f3)λ2 + (3− f2)λ+ (−2− f1) = 0.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Umpan balik dan terstabilkan.. 123
Karena lokasi yang tepat dari "zeros" tidak penting, digunakan kriteria Routh-Hurwitzuntuk memperoleh kondisi-kondisi fi yang akan menjamin kestabilan asimtotik. Skemanyaadalah:
1 3− f2 0−1− f3 −2− f1 0
(−1−f3)(3−f2)−(−2−f2)−1−f3
0 0
−2− f1 00
Maka dari itu, kondisi syarat perlu dan cukup untuk stabil asimtotik adalah:
−1− f3 > 0, −2− f1 > 0, (−1 − f3)(3− f2) > (−2− f1).
Latihan 28 Berikan contoh sistem linear invarian-waktu yang tidak dapat dikontrol tapidapat distabilkan.
Latihan 29 Tunjukkan bahwa sistem ivarian waktu
x(t) = Ax(t) +Bu(t)
dalam hal ini u(t) tidak harus suatu skalar adalah bisa distabilkan bila ruang bagian tak-stabilnya termuat didalam ruang bagian
Latihan 30 Tinjau realisasi takterkontrol:
x(t) =
−2 1 0 00 −2 0 00 0 −1 00 0 0 −1
+
0111
u(t).
Apakah realisasi ini dapat distabilkan? Apakah memungkinkan mendapatkan suatu vektorF sedemikian hingga hukum umpan balik u(t) = Fx(t) menyebabkan nilai karakteristik darisistem umpan balik adalah: −2,−2,−1,−1 atau −2,−2,−2,−2,−1 atau −2,−2,−2,−2?
Latihan 31 Sistem linear terkontrol dan teramati diberikan oleh persamaan berikut:
x =
(
1 23 1
)
x+
(
01
)
u, y = (1 2)x.
Bila umpan balik keadaan u = (k1 k2)x+r. Tentukan nilai k1 dan k2 supaya sistem umpanbalik keadaan tetap terkontrol tetapi tak dapat diamati.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

124 Umpan balik keadaan dan keluaran..
5.2 Pengamat dan prinsip pemisahan
Banyak prosedur kontrol dari suatu sistem didasarkan pada asumsi bahwa semua komponenvektor-keadaan dapat diamati. Dalam prosedur yang demikian hukum kontrol mempunyaibentuk
u(t) = Fx(t) atau (u(t) = Fx(t) +Gv(y)).
Bagaimanapun dalam berbagai sistem perlengkapan pengukuran yang dibutuhkan untukmengamati keseluruhan keadaan sangat mahal, terutama dalam sistem "fisika". Dalam sis-tem ekonomi prosedur pengukuran statistika yang dibutuhkan sangat mahal, adakalanyasangatlah tidak mungkin memperoleh pengukuran dari keseluruhan keadaan bila beber-apa fariabel internal tidak bisa dicapai. Misalnya suatu satelit, karena komplek masalahperalatannya, pengukuran akan sukar dilakukan, misalnya pengukuran temperatur yangakan digunakan dalam satelit tsb. Saat satelit dalam lintasan orbit, sangatlah terlalu jauhmengukur besaran-besaran tertentu dari bumi.
Dalam keseluruhan hal tsb., kontrol harus berdasar pada suatu informasi yang digu-nakan, yakni keluaran y(t) = Cx(t) (untuk penyederhanaan dimabil D = 0, dalam halD 6= 0 dapat ditangani dalam keadaan standart bila y(t) − Du(t) = Cx(t) diintepre-tasikan sebagai pengukuran baru). Diperlukan suatu sistem pembantu yang dinamakanpengamat (observer) yang mempunyai masukan u(t) dan keluaran y(t) dari sistem riil dankeluran x(t) suatu pendekatan dari kedaan x(t) dari sistem riil. Suatu pengamat darisistem x(t) = Ax(t) +Bu(t), y(t) = Cx(t) diasumsikan berbentuk:
z(t) = Pz(t) +Qu(t) +Ky(t)
x(t) = Sz(t) + Tu(t) +Ry(t).
Vektor z(t) adalah keadaan dari pengamat. Sedangkan matriks-matriks
P,Q,K, S, T dan R
adalah matriks-matriks yang dapat ditenttukan. Bisa dibayangkan sistem rill sebagai suatusatelit dalam orbit dimana tidak semua komponen dari x(t) dengan mudah dapat diukur,tidak banyak fariabel-fariabel keluaran yang bisa membantu, misalnya hanya posisi danjarak yang bisa memberikan informasi. Sedangkan pengamat adalah suatu sistem dibumi,misalnya saja suatu program komputer yang berfungsi untuk memperoleh semua fariabeldengan mudah.
Diagram alir pengamat dan sistem riil dan hubungan diantara sistem-sistem tsb. dis-ajikan dalam Gambar 5.1.Terlihat bahwa pengamat dan sistem riil tampak dalam Gambar 5.1.
Bila kesemuanya memungkinkan, pengamat seharusnya paling tidak memenuhi per-syaratan berikut:
1. Bila x(t0) = x(t0) pada waktu tertentu t0, maka didapat x(t) = x(t) untuk t ≥ t0.Sekali pengamat mempunyai estimasi yang bagi vektor keadaan riil, maka estimasiini akan tetap benar untuk waktu mendatang.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pengamat dan prinsip pemisahan.. 125
z(t) = Pz(t) +Qu(t) +Ky(t)x(t) = Sz(t) + Tu(t) +Ry(t)
x(t) = Ax(t) +Bu(t)y(t) = Cx(t)
✲
✲
✲
pengamat
u(t)
y(t)
x(t)
sistem riil
✲
✲
Gambar 5.1: Sistem pengamat.
2. Beda x(t) − x(t) harus konvergen ke nol bila t → ∞ terlepas dari kondisi awalx(0), z(0) dan kontrol u(t).
Akan dikonstruksi suatu pengamat dimana S = I, T = R = 0, hal ini memberikanx(t) = z(t) dengan demikian keadaan pengamat merupakan pendekatan keadaan x(t).Selajutnya diperoleh:
x(t)− ˙x(t) = Ax(t) +Bu(t)− P x(t)−Qu(t)−Ky(t)
= Ax(t) +Bu(t)− P x(t)−Qu(t)−KCx(t)
= (A−KC)x(t)− P x(t) + (B −Q)u(t)
Dari formulasi persyaratan pertama pengamat menghasilkan
B = Q, A−KC = P.
Oleh karena itu pengamat mempunyai bentuk:
˙x(t) = Ax(t) +Bu(t) +K(y(t)− y(t)), dengan y(t) = Cx(t). (5.4)
Terlihat sangat banyak kemiripan dengan sistem asal. Sistem (5.4) merupakan duplikatdari sistem riil terlepas dari suku tambahan K(y(t) − y(t)) yang bisa ditafsirkan sebagaisuku koreksi. Diagram alir dari kondisi ini diberikan dalam Gambar 5.2.
Selanjutnya agar persyaratan kedua dipenuhi, dikaji bagaimana mengestimasi kesala-han e(t) = x(t)− x(t) bila t→ ∞,
e(t) = x(t)− ˙x(t)
= Ax(t) +Bu(t)− Ax(t)−Bu(t)−K(Cx(t)− cx(t))
= (A−KC)(x(t)− x(t)) = (A−KC)e(t).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

126 Umpan balik keadaan dan keluaran..
x = Ax+Buy = Cx
˙x = Ax+Bu+K(y − y)y = Cx
❄
✻K✲+
−
✲
✲
✲✲
u
y
y
x
Gambar 5.2: Diagram alir sistem pengamat.
Karena e(t) harus konvergen ke nol, persyaratannya menjadi matriks (A − KC) harusstabil asimtotik. Dalam hal ini timbul pertanyaan sebagai berikut: Dapatkah suatu ma-triks K diperoleh sedemikian hingga persyaratan tsb. memungkinkan? Teorema berikutmenyatakan bahwa hal tsb. mungin bila (C,A) teramati.
Teorema 19 Untuk setiap polinomial
w(λ) = λn + w1λ(n−1) + w2λ
(n−2) + . . .+ wn
dengan koefisien wi riil ada suatu matriks ukuran n× p sedemikian hingga det[λI − (A−KC)] = w(λ) bila dan hanya bila (C,A) teramati.
Bukti(C,A) teramati bila dan hanya bila (AT , CT ) terkontrol. (AT , CT ) terkontrol bila dan hanyabila untuk setiap polinomial w(λ) ada matriks F sedemikian hingga det[λI−(AT+CTF )] =w(λ). Pilih K = −F T , maka
det[λI − (A−KC)] = det[λI − (AT − CTKT )] = w(λ)
�
Contoh 37 Contoh ini merupakan kelanjutan contoh sebelumnya dari pendulum terba-lik. Di asumsikan bahwa hanya pengukuran-pengukuran skalar dan posisi kereta dibuatsedemikian hingga A dan C adalah:
A =
0 1 0 025 0 0 00 0 0 1
−0.6 0 0 0
, C =(
0 0 1 0)
.
Matriks keteramatan adalah:
Mo =
0 0 1 00 0 0 1
−0.6 0 0 00 −0.6 0 0
⇒ rank Mo = 4.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pengamat dan prinsip pemisahan.. 127
Sehingga Teorema 19 bisa digunakan. Misalkan dikonstruksi suatu pengamat sedemikianhingga pole dari (A−KC) pada titik-titik −1 (sebanyak dua kali) dan −1± i. Ini berartibahwa K = (K − 1 k2 k3 k4)
T harus dikonstruksi sedemikian hingga:
det[λI − (A−KC)] = (λ+ 1)2(λ+ 1− i)(λ+ 1 + i)
= λ4 + 4λ3 + 7λ2 + 6λ+ 2,
dilain pihak
det[λI − (A−KC)] = det
λ −1 k1 0−25 λ k2 00 0 λ+ k3 −10.6 0 k4 λ
= λ4 + k3λ3 + (−25 + k4)λ
2
+(−25− 0.6k1)λ+ (−0.6k2 − 25k4)
sehingga dengan menyamakan koefisien yamg bersesuaian persamaan diatas, diperoleh:
k3 = 4; k4 = 32; k1 =106
0.6dan k2 =
802
0.6.
Dalam hal ini pengamat mempunyai bentuk:
˙x(t) =
0 1 0 025 0 0 00 0 0 1
−0.6 0 0 0
x(t) +
0−2.401
u(t)
+
−10606
−80206
432
(y(t)− (0 0 1 0)x(t)) .
Penyelesaian pengamat ini, memenuhi:
limt→∞
x(t) = x(t).
Latihan 32 Tinjau kedinamikan dari trayektori satelit. Bila hanya pengukuran satu skalaryang diijinkan yaitu y1(t) atau y2(t) yang mana harus diplih supaya keteramatan dipenuhi?Konstruksikan suatu pengamat untuk pengukuran yang dipilih sedemikian hingga pole-poledari pesamaan kesalahan
e(t) = (A−KC)e(t)
semuanya sama dengan −1.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

128 Umpan balik keadaan dan keluaran..
Teorema 19 memberikan suatu syarat perlu dan cukup sedemikian hingga pole dari ma-triks (A−KC) bisa dipilih sekehendak kita. Suatu kemungkinan pemilihan adalah men-empatkan semua pole diseparuh bidang sebelah kiri (pole-pole tidak harus pada tempat-tempat khusus). Ini tentunya persyaratan yang lebih lunak yang mana keteramatan meru-pakan syarat cukup, tetapi bukan merupakan syarat perlu sebagaimana yang diberikandalam uraian berikut. Tinjau pasangan matriks:
A =
(
1 00 −1
)
dan C = (1 0),
dapat dicek bahwa (C,A) tak-teramati. Pole dari A−KC dengan K = (k1 k2)T adalah
"zeros" daridet[λI − (A−KC)] = (λ− 1 + k1)(λ+ 1).
Bila dipilih k1 > 1, kedua "zeros" terletak diseparuh bidang kiri, sehingga bila dikonstruksipengamat dimana letak pole sama dengan letak zeros tsb., maka untuk t → ∞ pengamatini akan konvergen ke vektor keadaan riil. Salah satu polenya adalah −1, merupakan poleyang sudah tetap tidak bisa diubah.
Suatu syarat perlu dan cukup sedemikian hingga semua pole dari (A − KC) harusterletak di separuh bidang kiri adalah bila A dan C diuraikan kedalam suatu basis tertentusedemikan hingga masing-masing mempunyai bentuk:
A =
A1,1 | A1,2
−− −− −−0 | A2,2
, C = (0 | C1),
dimana pasangan (C1, A2,2) teramati. Oleh karena itu sekarang haruslah kondisi matriksA1,1 stabil asimtotik. Sifat dari pasangan matriks (C,A) sedemikian hingga suatu K dapatdipilih dimana pole-pole dari matriks (A−KC) terletak di separuh bidang kiri dinamakandapat-dideteksi.
Latihan 33 Tunjukkan bahwa sistem invarian-waktu
x(t) = Ax)t) +Bu(t), y(t) = Cx(t)
dapat-dideteksi bila dan hanya bila ker(Mo) termuat dalam ruang stabilnya.
Latihan 34 Tunjukkan bahwa keterdetesian adalah suatu konsep dual, yaitu bila (A,B)dapat distabilkan, maka (BT , AT ) dapat-dideteksi.
�
Pengamat dikenalkan sebab kekurangan informasi mengenai keseluruhan komponen vektorkeadaan. Vektor keadaan ini digunakan dalam suatu loop umpan balik sebagaimana untukmemberi sifat-sifat yang diharapkan sistem. Selanjutnya dikombinasi konsep umpan balik
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pengamat dan prinsip pemisahan.. 129
dengan pengamat. Bila u(t) = Fx(t) suatu hukum umpan balik yang membuat sistemx(t) = (A + BF )x(t) stabil asimtotik, maka diinginkan hal serupa pada hukum umpanbalik u(t) = F x(t). Selanjutnya secara bersama-sama perilaku sistim asli dan pengamat:
x(t) = Ax(t) +BFx(t)˙x(t) = Ax(t) +BFx(t) +K(Cx(t)− Cx(t)).
Dengan menggunakan e(t) = x(t)− x(t) persamaan diatas menjadi
x(t) = (A+BF )x(t)− BFe(t)e(t) = (A−KC)e(t).
(5.5)
atau ekivalen dengan:(
x(t)e(t)
)
=
(
A+BF −BF0 A−KC
)(
x(t)e(t)
)
.
✲ ✲ ✲ ✲✲✲
++
++ B∫
C
A ✛
✻
x(t) y(t)v(t)
B✲
u(t)
✛ K ✛❄
✛
−
C y(t)
✛❄∫
✻
✛
✲
✲
✻
A
Fx
sistem asli
kompensator
Gambar 5.3: Diagram alir pemisahan sistem.
Nilai karakteristik dari sistem diatas sama dengan nilai karakteristik dari matriks A +BF bersama-sama dengan nilai karakteristik matriks A − KC. Jadi nilai karakteristikkeseluruhan sistem sama dengan nilai karakteristik yang diperoleh melalui umpan baliku(t) = Fx(t) dan malalui pengkonstruksian pengamat.
Umpan balik u(t) = Fx(t) dan pengamat bisa didisain secara tak bergantungan satudengan yang lainnya. Bila diletakkan bersama sistem asli dan pengamat dengan umpan
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

130 Umpan balik keadaan dan keluaran..
balik u(t) = Fx(t), nilai karakteristik tidak saling mempengaruhi. Prinsip ini dinamakanprinsip pemisahan. Total sistem dari sistem asli, pengamat dan loop umpan balik diberikanringkasannya dalam diagram alir dalam Gambar 5.3 yang tersaji dalam halaman sebelum-nya. Dua sub-sistem yang dikelilingi oleh garis-putus masing-masing adalah sistem aslidan kompensator. Kompensator disini berbeda dengan kompensator statik yang telahdikenalkan, oleh karena itu kompensator ini disebut kompensator dinamik.
+
+
+
+ +
+
+ +
+
posisi keretagaya dorongvu y
x1
x2
x3
x4
f1
f2
f3
f4
k1
k2
k3
k4
∫
∫
∫
∫
25 -2.4
-.6
+
-
Gambar 5.4: Gambungan umpan balik keadaan dan pengamat.
Contoh 38 Diberikan contoh kereta dengan pendulum terbalik (lihat Gambar 5.4). Padadua contoh sebelumnya didisain hukum umpan balik keadaan dan pengamat. Kombinasipendisainan sebagai berikut, nilai numerik fi dan ki dengan i = 1, 2, 3, 4 seperti yang telahdiberikan dalam dua contoh terdahulu.
�
Sebegitu jauh belum dipertimbangkan masukan baru v(t), yang dberikan oleh u(t) =Fx(t)+ v(t), Fx(t) adalah komponen umpan balik, sedangkan v(t) adalah komponen baruloop-buka. Bila diubah keseluruhan disain dari sistem asli dan pengamat dalam diagramyang lebih ramping sebagaimana diberikan oleh Gambar 5.5.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Penolakan gangguan.. 131
sistem asli ✲+✻
✲ ✲
✲
✛ ✛ ✛ ✛❄
✲
✻
❄
✻
A
B
C
F K∫
+
−
a
bc
v(t) u(t) y(t)
x
y
+
Gambar 5.5: Peyederhanaan diagram.
Dalam Gambar 5.5 terlihat hubungan baru bc sebagai pengganti dari hubungan abdalam diagram sebelumnya. Dalam diagram terlihat v(t) tidak masuk ke kompensator. Halini tidak akan mengubah sifat kestabilan dari keseluruhan sistem disebabkan v(t) hanyabergantung pada waktu t tidak tergantung pada keadaan. Diagram yang paling akhirsecara simbolik bisa digambar sebagai mana yang diberikan dalam Gambar 5.6. Terlihat
sistem dinamik dalamloop-umpan balik
sistemasli ✲✲+
✻
✲
✛
v
F x
y
Gambar 5.6: Simbolik diagram.
dalam Gambar 5.6 kestabilan dari suatu pengamat bisa diinterpretasikan sebagai umpanbalik keluaran, dalam hal ini diperoleh suatu sistem dinamik loop-umpan balik.
5.3 Penolakan gangguan
Misalkan suatu sistem linear waktu-invarian dengan m+ l masukan yang dipartisi sebagai(u(t), v(t)):
x(t) = Ax(t) +Bu(t) + Ev(t), y(t) = Cx(t), (5.6)
dimana u(t) adalah masukan sistem sebagaimana biasanya, sedangkan v(t) dapat diin-terpretasikan sebagai "gangguan". Gangguan ini tidak dapat diukur secara langsung,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

132 Umpan balik keadaan dan keluaran..
hanyalah keluaran y(t) yang dapat diukur. Dalam kasus ini bertujuan mendisain suatuhukum umpan balik:
u(t) = Fx(t) + u(t)
sedemikian hingga v(t) tidak mempunyai pengaruh apapun terhadap keluaran dan tidakmasalah apa bentuk dari u(t) atau keadaan awal x(0) dari sistem (5.6).
Contoh 39 Diberikan sistem
x1(t) = x2(t) + u(t)
x2(t) = v(t)
y(t) = x1(t).
Bila digunakan hukum umpan balik u(t) = −x2(t) + u(t), diperoleh:
y(t) = x1(0) +
t∫
0
u(τ)dτ,
terlihat bahwa keluaran y(t) bebas dari gangguan v(t).
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bab 6Penyajian masukan/keluaran
Penyajian masukan/keluaran dari suatu sistem merujuk pada suatu pendiskripsian di-mana masukan secara langsung dikaitkan dengan keluaran, tanpa fungsi media-antara lain-nya atau fariabel keadaan. Sudah dikaji suatu masukan-keluaran melalui kajian fariabelkeadaan pada bagian yang terdahulu. Kajian masukan-keluaran juga bisa ditemui padapembahasan terdahulu dalam fungsi atau matriks respon impuls. Melalui fungsi K(t, s)fungsi masukan secara langsung dikaitkan dengan fungsi keluaran. Diskripsi ini diperolehdengan mengeliminasi vektor keadaan x(t). Pada bagian berikut ini dikaji penyajian yangberguna dari masukan/keluaran suatu sistem.
6.1 Transformasi Laplace dan kegunaannya untuk sis-
tem invarian-waktu linear
Transformasi Laplace dari fungsi kontinu sepotong-demi sepotong f : [0,∞) → R, didifin-isikan sebagai:
F (s) = L(f) =∞∫
0
f(t)e−stdt.
Bila f = O(ebt) untuk t→ ∞, yaitu ia bertambah secara eksponensial dengan b ∈ R suatukonstata, maka integral diatas "ada" untuk semua bilangan riil s > b. Bila f = O(ebt),maka integral juga ada untuk semua bilangan kompleks s dengan Re(s) > b (Re adalahbagian riil), sebab:
∣
∣f(t)e−st∣
∣ = |f(t)| e−Re(s)t.
Oleh karena itu domain dari fungsi F : (b,∞) → R bisa diperluas sampai semua s ∈ C
dengan Re(s) > b danF : {s ∈ C|Re(s) > b} → C
133

134 Penyajian masukan/keluaran..
adalah fungsi kompleks. Pada kajian disini s akan selalu menunjukkan bilangan kompleks.Perluasan ke fungsi bernilai vektor adalah:
L(f) = (L(f1), . . . ,L(fn))T = (F1(s), . . . , Fn(s))T = F (s).
Sedangkan perluasan ke matriks fungsi adalah secara per-komponen. Misal, diberikansistem differensial invarian-waktu matriks respon impulsnya adalah:
y(t) =
t∫
−∞
G(t− τ)u(τ)dτ.
Untuk penyederhanaan, diasumsikan u(t) = 0 untuk t ≤ 0, maka
y(t) =
t∫
0
G(t− τ)u(τ)dτ. (6.1)
Andaikan bahwa fungsi y(.), u(.) dan G(.) mempunyai transformasi Laplace yang masing-masing dinotasikan dengan Y (.), U(.) dan H(.), jadi
Y (s) =
∞∫
0
y(t)e−stdt, U(s) =
∞∫
0
u(t)e−stdt
dan
H(s) =
∞∫
0
G(t)e−stdt,
maka transformasi Laplace dari (6.1) diberikan oleh:
Y (s) = H(s)U(s). (6.2)
Matriks H(S) p×m disebut matriks transfer dari sistem. Ia memberikan diskripsi sistemsangat sederhana. Sifat bahwa (6.2) adalah transformasi Laplace dari (6.1) disebut teorikonvolusi. Disini diasumsikan pembaca mengenal sifat ini dan secara lebih umum dengantransformasi Laplace. Bila G(t) = O(ebt) maka matriks transfer terdifinisi hanya untukRe(s) > b. Teori transformasi Laplace menganjurkan bahwa H(s) analitik untuk Re(s) >b, dan teori bilangan komplek menerangkan bahwa keujudan dari kekontinuan analitikH(s) adalah tunggal. Suatu Fungsi matriks ada untuk semua s ∈ C dan tunggal, analitikdibidang kompleks kecuali disejumlah titik-titik terisolasi. Hal ini adalah identitik denganH(s) untuk Re(s) > b.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Transformasi Laplace dan kegunaannya.. 135
Bila X(s) adalah transformasi Laplace dari x(t), maka
L(
dx(t)
dt
)
=
∞∫
0
dx(t)
dte−stdt
= x(t)e−st∣
∣
∞0+
∞∫
0
x(t)se−stdt
= −x(0) + sX(s).
Transformasi Laplace dari x(t) = Ax(t) +Bu(t), x(0) = x0 adalah
sX(s)− x0 = AX(s) +BU(s) (6.3)
dari persamaan (6.3) diperoleh:
X(s) = (sI −A)−1x0 + (sI − A)−1BU(s).
Juga, bila transformasi Laplace keluaran y(t) = Cx(t) adalah Y (s) = CX(s) dan diasum-sikan x(0) = 0, maka
Y (s) = C(sI −A)−1BU(s) = H(s)U(s) (6.4)
Bila dibandingkan dengan:
y(t) =
t∫
0
CeA(t−τ)Bu(τ)dτ
yang memberikan hasil
H(s) = L(CeAtB) = C(sI − A)−1B. (6.5)
Perlu diperhatikan bahwa, secara perlu tidak benar semua nilai karakteristik dari A menye-babkanH(s) singulir, sebab perkalian diantara (sI−A)−1 dengan C dan B beberapa faktormungkin terkansel. Persamaan (6.5) menyatakan bahwa matriks transfer adalah transfor-masi Laplace dari matriks respons impuls.
Contoh 40 Kembali pada contoh sistem dinamik satelit yaitu;
A =
0 1 0 03 0 0 20 0 0 10 −2 0 0
, B =
0 01 00 00 1
dan C =
(
1 0 0 00 0 1 0
)
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

136 Penyajian masukan/keluaran..
Matriks transfer dari sistem tsb. adalah:
H(s) = L(G(t)) = L(
sin(t) 2− 2 cos(t)−2 + 2 cos(t) −3t + 4 sin(t)
)
=
(
1s2+1
2s− 2s
s2+1
−2s+ 2s
s2+1− 3
s2+ 4
s2+1
)
=
( 1s2+1
2s3+s
−2s3+s
s2−3s4+s2
)
Sekarang suatu metode baru sudah didapat untuk menghitung matriks transisi. Trans-formasi Laplace dari :
x(t) = Ax(t). x(0) = x0 dan x(t) = eAtx0
adalahX(s) = (sI −A)−1x0, X(s) = L(eAt)x0.
JadieAt = L−1
[
(sI −A)−1]
,
dimana L−1 transformasi Laplace-invers. Fungsi matriks (sI−A)−1 dinamakan resolventdari matriks A.
6.1.1 Hubungan sistem-sistem
;H1(s) H2(s)U1(s) Y1(s) U2(s) Y2(s)
Gambar 6.1: Dua Sistem.
Gambar 6.1 menjelaskan dua sistem masing-masing dengan fungsi transfer H1(s) danH2(s). Diskripsi dari sistem-sistem lewat matriks transfer bermanfaat bila diinginkan un-tuk menghubungkan sistem-sistem yang ada.
Gambar 6.2 menjelaskan hubungan "parallel" dari dua sistem dimana simbol⊕
meny-atakan penjumlahan. Jadi matriks tranfer dari sistem parallel ini diberikan oleh
H(s) = H1(s) +H2(s).
Sedangkan hubungan seri dari dua sistem diberikan oleh Gambar 6.3 dan matriks trans-fernya dari hubungan seri ini diberikan oleh H(s) = H1(s)H2(s).
Perlu diperhatikan bahwa untuk sistem dengan banyak masukan - banyak keluaran yaitumasing-masing m dan p lebih besar dari 1, umumnya perkalian dua matriks fungsi H1(.)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Transformasi Laplace dan kegunaannya.. 137
H1(s)
H2(s)
U(s) Y (s)+
Gambar 6.2: Hubungan parallel dua sistem.
H1(s) H2(s)U(s) Y (s)
Gambar 6.3: Hubungan seri dua sistem.
H1(s)
H2(s)
U(s) Y (s)V (s)+-
Gambar 6.4: Hubungan umpan balik dua sistem.
dan H2(.) tidak komutatif, yaitu H1H2 6= H2H1. Oleh karena itu urutan dimana sistem-sistem dihubungkan sangatlah penting. Hubungan umpan-balik dua sistem diberikanoleh Gambar 6.4.
Bila signal yang masuk ke H1(S) dinotasikan dengan V (S), maka matriks transfer darikeseluruhan sistem dihitung sebagai berikut:
V (s) = U(s)−H2(s)Y (s)Y (s) = H1(s)V (s)
}
⇒ Y (s) = H1(s)(U(s) −H2(s)Y (s)).
Diselesaikan y(s) didapat:
Y (s) = (I +H1(s)H2(s))−1H1(s)U(s).
Jadi matriks transfer hubungan umpan-balik dari dua sistem adalah
H(s) = I +H1(s)H2(s))−1H1(s). (6.6)
Pertimbangan hubungan diatas diasumsikan bahwa banyaknya masukan adalah m sedan-gkan banyaknya keluran p sehingga uraian hubungan diatas tetap punya makna.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

138 Penyajian masukan/keluaran..
6.1.2 Ossilasi
Sebegitu jauh kajian kita, telah diasumsikan fungsi-fungsi masukan dan keluaran adalahfungsi bernilai riil. Dari segi pandangan kontrol adalah bermanfaat untuk menggunakanfungsi-fungsi bernilai kompleks. Bila digunakan fungsi masukan kompleks:
u(t) =
{
0, untuk t > 0estc, untuk t ≥ 0
dengan s ∈ C dan c suatu vektor kompleks. Bila x(0) = 0, maka fungsi keluaran yangterkait dengan masukan tsb. diberikan oleh:
y(t) =
t∫
0
G(t− τ)esτcdτ
=
t∫
0
G(r)es(t−r)cdr
=
t∫
0
G(r)e−srdr
estc
=
t∫
0
G(τ)e−sτdτ
u(t).
Bila t → ∞ dan diasumsikan integral konvergen ke H(s) untuk Re(s) cukup besar, makadperoleh
y(t) ∼ H(s)u(t).
Bila s = iω dengan ω ∈ R, maka u(t) = c(cos(ωt) + i sin(ωt)) = eiωtc dan
y(t) ∼ H(iω)eiωtc untuk t sangat besar.
Masukan u(t) = eiωtc disebut ossilasi harmonik sedangkan H(iω)eiωtc dinamakan re-spon stasioner pada ossilasi harmonik eiωtc. Matriks H(iω) dinamakan matriks re-sponse frekuensi. Beda diantara y(t) dengan response stasioner dinamakan perilaku
transient. Bila∞∫
0
Gi,j(τ)dτ <∞ untuk semua i, j, maka perilaku transient mendekati nol
untuk t → ∞. Dan dari hasil kajian kestabilan bisa disimpulkan bahwa∞∫
0
Gi,j(τ)dτ < ∞bila semua nilai karakteristik λi dari matriks A memenuhi Re(λi) < 0.
6.1.3 Fungsi rasional
Pada bagian ini lebih rinci dikaji matriks transfer
H(s) = L(G(t)) = C(sI − A)−1B.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Transformasi Laplace dan kegunaannya.. 139
Matriks invers (sI − A)−1 secara prinsip bisa diperoleh dengan menggunakan aturan"Cramer", misalkan, hasilnya diberikan sebagai berikut:
(sI − A)−1 =1
p(s)
q1,1(s) . . . q1,n(s)...
...qn,1 . . . qn,n(s)
,
dimana p(s) adalah polinomial karakteristik dari matriks A. Ditulis p(s) sebagai:
p(s) = sn + p1sn−1 + . . .+ pn−1s+ pn, pi ∈ R.
Suku-suku qi,j(s) untuk semua i, j adalah determinan dari submatriks (sI −A) berukuran(n − 1) × (n − 1), oleh karena itu suku-suku tsb. merupakan polinomial dalam s yangberderajad tidak lebih dari (n − 1). Jadi elemen-elemen dari (sI − A)−1 adalah fungsirasional dalam s yaitu qi,j(s)
p(s). Suatu fungsi rasional adalah pembagian dari dua poli-
nomial. Fungsi rasional ini dimamakan fungsi rasioanal sejati kuat bila derajad daripembilang lebih kecil dari derajad penyebutnya. Bila suatu fungsi rasional diberikan olehh(s), maka suatu difinisi ekivalen dari fungsi rasional murni adalah lim
|s|→0h(s) = 0. Bila
limit ini bernilai hingga yaitu tidak perlu bernilai nol, maka dalam hal ini dinamakan fungsirasional sejati. Mudah dicek bahwa elemen-elemen dari H(s) adalah fungsi rasional sejatikuat. Misalkan H(s) ditulis sebagai R(s)
p(s), dimana R(s) adalah matriks berukuran m × p
dengan elemen-elemen polinomial berderajad kurang dari n sedangkan derajad dari p(s)sama dengan n. Sebagaimana telah didiskusikan sebelumnya, pole-pole dari H(s) adalahtitik-titik dimana H(s) mempunyai singularitas, yaitu titik s0 dimana lim
s→s0H(s) tidak ada.
Nilai-nilai karakteristik dari A merupakan calon titik-titik pole, tetapi tidak perlu keselu-ruhannya merupakan pole.
Contoh 41 Bila
A =
(
−1 00 −2
)
B =
(
10
)
dan C = (1 1),
maka
(sI − A)−1 =
(
s+ 1 00 s+ 2
)−1
=1
(s+ 1)(s+ 2)
(
s+ 2 00 s+ 1
)
=
(
1s+1
0
0 1s+2
)
.
Terlihat matriks (sI − A)−1 mempunyai pole-pole di s = −1 dan s = −2. Sedangkan,
C(sI − A)−1)B =1
s+ 1
mempunyai hanya satu pole, yaitu di s = −1.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

140 Penyajian masukan/keluaran..
�
Sebegitu jauh dibahas sistem dengan D = 0. Bila D 6= 0 dan x0 = 0, maka
y(t) =
t∫
0
[
CeA(t−τ)B +Dδ(t− τ)]
u(τ)dτ
dan fungsi matriks H(s) adalah:
H(s) = C(sI − A)−1B + L[Dδ(t− τ)] = C(sI − A)−1B +D.
Bila diperhatikan matriks ini dengan rinci, terlihat bahwa elemen-elemennya merupakanfungsi rasional sejati, karena umumnya derajad dari pembilang sama dengan derajad daripenyebutnya. Contoh berikut menunjukkan ada fungsi transfer dimana elemennya bukanfungsi rasioanal.
Contoh 42 Fungsi transfer dari sistem "rata-rata gerakan" adalah:
H(s) =
∞∫
0
G(t)e−stdt =1
T
T∫
0
1.e−stdt =1− e−st
sT.
�
6.2 Fungsi transfer dan matriks transfer
Pada bagian ini utamanya akan dikaji masukan tunggal keluaran tunggal sistem differen-sial linear. Dalam kasus ini, matriks transfernya merupakan suatu fungsi skalar yang dino-tasikan dengan h(s) sebagai ganti dari matriks transfer H(s) yang digunakan dalam sistembanyak masukan-banyak keluaran. Pada bagian ini, juga diasumsikan derajad pembilangdari h(s) lebih kecil atau sama dengan dari derajad penyebutnya. Tanpa menghilangkanke generalannya, secara eksplisit ditulis h(s) sebagai berikut:
h(s) =q(s)
p(s)=q0s
n + q1sn−1 + . . .+ qn
sn + p1sn−1 + . . .+ pn. (6.7)
Telah dikenal dengan baik bahwa suatu polinomial derajad n bisa difaktorkan kedalam nsuku-suku linear, oleh karena itu diperoleh:
h(s) =q(s)
p(s)=c(s− b1)(s− b2) . . . (s− bk)
(s− a1)(s− a2) . . . (s− an)(6.8)
dengan ai, bi ∈ C, c ∈ R dan k 6= n. Diasumsikan bahwa q(s) dan p(s) tidak mem-punyai faktor persekutuan. Bila punya, faktor-faktor persekutuan tsb. akan terkansel.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Fungsi transfer dan matriks transfer.. 141
"Zeros" dari pembilang p(s) yaitu a1, a2, . . . , an dinamakan "pole" dari fungsi transfer danb1, b2, . . . , bk dinamakan "zeros" dari fungsi transfer. Alasan dari terminologi yang dike-nalkan adalah sebagai berikut. Misalkan diberikan masukan:
u(t) =
{
es0t, t ≥ 00, t < 0
maka transformasi Laplace dari keluran diberikan oleh:
Y (s) =c(s− b1)(s− b2) . . . (s− bk)
(s− a1)(s− a2) . . . (s− an).
1
s− s0
Bila s0 6= bi, i = 1, 2, . . . , k, maka Y (s) bisa difaktorkan sebagai berikut:
Y (s) =A1
s− a1+
A2
s− a2+ . . .+
An
s− an+
An+1
s− s0, Ai ∈ C, (6.9)
dimana untuk alasan penyederhanaan, diasumsikan bahwa semua pole ai mempunyai "mul-tifisitas satu". Transformasi invers dari (6.9) menghasilkan:
y(t) = A1ea1t + A2e
a2t + . . .+ Aneant + An+1e
s0t,
dalam hal ini n suku-suku pertama dinamakan "mode bebas" dari sistem. Suku yangterakhir adalah suatu hasil dari masukan. Selanjutnya, bila s0 = bi untuk beberapa i,nisalnya saja i = 1, maka
Y (s) =c(s− b1)(s− b2) . . . (s− bk)
(s− a1)(s− a2) . . . (s− an).
1
s− b1
=c(s− b2)(s− b3) . . . (s− bk)
(s− a1)(s− a2) . . . (s− an)
=A1
s− a1+
A2
s− a2+ . . .+
An
s− anAi ∈ C.
Terlihat bahwa frekuensi dari signal masukan s0 tidak nampak dalam signal keluaran,hanya mode bebas yang nampak. Zeros dari sistem adalah frekuensi-frekuensi yang bukanmerupakan bagian bentuk dari signal keluaran.
Definisi 8 Bila semua nilai karakteristik λi bagian riilnya adalah negatif, waktu-konstanσ yang berkaitan dengan sistem di definisikan sebagai σ−1 = mini{Re(λi)}.
Definisi 9 Sistem masukan tunggal keluaran tunggal
x(t) = Ax(t) +Bu(t), y(t) = Cx(t)
adalah suatu sistem bukan phase minimum bila setidaknya satu zeros bagian rill nyapositip.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

142 Penyajian masukan/keluaran..
Contoh 43 Diberikan fungsi transfer suatu sistem:
−s + 1
s2 + 5s+ 6=
3
s+ 2+
−4
s+ 3.
Terlihat bahwa sistem ini bukan phase minimum. Bila masukan fungsi Heaviside dikenakanpada sistem, maka keluaranny adalah
y(t) =3
2(1− e−2t)− 4
3(1− e−3t), t ≥ 0.
Bisa dicek bahwa y(0) = 0 dan y(∞) = 16> 0; hal ini menyimpulkan bahwa suatu masukan
bernilai positip diperoleh dalam waktu yang begitu lama. Untuk suatu umpan balik stabil,cenderung dipilih u(t) = ky(t) dengan k < 0. Karena y(t) = −1 dan y(∞) = 1
6> 0, maka
tanda dari y(t) untuk nilai-nilai t yang sangat kecil akan berbeda dengan tanda y(t) untuknilai-nilai t yang begitu besar. Oleh karena itu pada kasus ini secara intuisi dipilih kontrolumpan balik keluaran u(t) = ky(t). Jadi, untuk sistem-sistem bukan phase minimumdibutuhkan perhatian yang teliti bila diinginkan untuk menggunakan suatu umpan balikkeluaran.
�
Contoh 44 Lagi ditinjau sistem dinamik satelit. Suatu versi dimana hanya satu fari-abel masukan u(t) dan satu fariabel keluaran y2(t) yang dipertimbangkan. Untuk ω = 1,diperoleh matriks-matriks:
A =
0 1 0 03 0 0 20 0 0 10 −2 0 0
, B =
0001
, C =(
0 0 1 0)
.
Fungsi transfer ini adalah:s2 − 3
s4 + s2. Zeros dari sistem ini adalah s = +
√3 dan s = −
√3,
secara tegasnya dalam frekuensi ini tak ada ossilasi sama sekali; s = ±√3 berkaitan dengan
fungsi eksponensial yang mana tidak bisa membentuk suatu komponen signal keluaran.Tetapai karena sistem tidak stabil, maka mode yang dibangun oleh masukan tidak akanpernah habis sama sekali.
�
Suatu sistem dengan masukan dan keluaran tunggal
x(t) = Ax(t) +Bu(t), y(t) = Cx(t) +Du(t)
dimana u(t) dan y(t) skalar, menghasilkan suatu fungsi transfer (matriks berukuran 1×1)yang diberikan oleh:
h(s) = C(sI − A)−1B +D, (6.10)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Fungsi transfer dan matriks transfer.. 143
dimana derajad pembilang lebih kecil atau sama dengan derajad penyebut. Sebaliknya,untuk fungsi transfer dengan derajad pembilang lebih kecil atau sama dengan derajadpenyebut (=n), ada matriks A, n × n, B, n × 1, C, 1 × n dan matriks D, 1 × 1 yangmemenuhi (6.10). Misalkan diberikan fungsi transfer h(s) = q(s)
p(s)dengan derajad q(s) ≤
derajad p(s). Pertama ditentukan D, ada dua kemungkinan:
1. bila derajad q(s) < derajad p(s), maka ambil D = 0,
2. bila derajad q(s) = derajad p(s), maka, h(s) ditulis sebagai berikut:
h(s) =q(s)
p(s)=
q0sn + q1s
n−1 + . . .+ qnsn + p1sn−1 + . . .+ pn
=q0(s
n + p1sn−1 + . . .+ pn)
p(s)
+(q1 − q0p1)s
n−1 + . . .+ (qn − q0pn)
p(s)
= q0 +q(s)
p(s),
dimana derajad q(s) < derajad p(s). Dalam hal ini diambil D = q0.
Agar supaya sederhana, notasi q(s) ditulis dengan q(s) yang tentunya berbeda dengan q(s)yang terdahulu. Dengan demikian bisa dilanjutkan dengan bentuk rasional
q(s)
p(s), dengan derajad q(s) < derajad p(s)
dan matriks D sebagaimana yang telah ditentukan yaitu D = q0. Sehingga diperoleh:
q(s) = q1sn−1 + q2s
n−2 + . . .+ qn, p(s) = sn + p1sn−1 + . . .+ pn.
Bila Y (s) dan U(s) masing-masing adalah transformasi Laplace dari y(t) dan u(t), makaY (s) = h(s)U(s), atau ekivalen:
p(s)Y (s) = q(s)U(s),
atausnY (s) + p1s
n−1Y (s) + . . .+ pnY (s) = q1sn−1U(s) + . . .+ qnU(s). (6.11)
Selanjutnya diawali dengan suatu q(s) yang khusus, yaitu ditentukan q(s) = qn = 1. Olehkarena itu dipunyai suatu sistem yang berbeda dengan aslinya. Dalam hal ini sebagai peng-ganti keluaran y(t), digunakan z(t) dengan transformasi Laplace Z(s). Maka diperoleh:
snZ(s) + p1sn−1Z(s) + . . .+ pnZ(s) = U(s),
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

144 Penyajian masukan/keluaran..
persamaan yang baru diatas merupakan transformasi Laplace dari
dnz(t)
dtn+ p1
dn−1z(t)
dtn−1+ . . .+ pnz(t) = u(t) (6.12)
dengan kondisi awal z(0) = z(0) = . . . = dzn−1(0)dtn−1 = 0. Persamaan (6.12) bisa ditulis
sebagai sistem persamaan differensial tingkat satu berbentuk:
d
dt
z(t)z(t)
...
...dzn−1(t)dtn−1
=
0 1 0 . . . 00 0 1 . . . 0...
......
......
0 0 0 0 1−pn −pn−1 . . . −p2 −p1
z(t)z(t)
...
...dzn−1(t)dtn−1
+
00......1
u(t).
Jadi diperoleh suatu sistem persamaan differensial
x(t) = Ax(t) +Bu(t), y(t) = Cx(t)
dengan keadaan x(t) =(
z(t) z(t) . . . dzn−1(t)dtn−1
)
dan
A =
0 1 0 . . . 00 0 1 . . . 0...
......
......
0 0 0 0 1−pn −pn−1 . . . −p2 −p1
, B =
00......1
, C = (1 0 . . . 0). (6.13)
Matriks-matriks dalam (6.13) merupakan suatu realisasi dari h(s) = 1p(s)
. Catatan, nilaikarakteristik dari matriks A dalah pole-pole dari h(s) sebab det(sI −A) = p(s).
Selajutnya ditinjau kasus untuk sebarang polinomial derajad pembilang q(s) < n.Transformasi Laplace invers dari (6.11) dengan nilai awal semua derivatif dari u(t) dany(t) sama dengan nol diberikan oleh:
dn
dtny(t) + p1
dn−1
dtn−1y(t) + . . .+ pny(t) = q1
dn−1
dtn−1u(t) + . . .+ qnu(t). (6.14)
Penyelesaian z(t) pada (6.12) akan dihubungkan dengan penyelesaian y(t) pada (6.14).Karena z(t) memenuhi (6.12), maka qnz(t) memenuhi:
dn
dtn(qnz(t)) + p1
dn−1
dtn−1(qnz(t)) + . . .+ pn(qnz(t)) = qnu(t). (6.15)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Fungsi transfer dan matriks transfer.. 145
Differensialkan (6.12) dan sekaligus dikalikan dengan qn, diperoleh:
dn
dtn(qnz(t)) + p1
dn−1
dtn−1(qnz(t)) + . . .+ pn(qnz(t)) = qnu(t). (6.16)
Dilanjutkan cara ini sampai diperoleh:
dn
dtn
(
qn−idi
dtiz(t)
)
+ p1dn−1
dtn−1
(
qn−idi
dtiz(t)
)
+ . . .+ pn
(
qn−idi
dtiz(t)
)
= qn−idi
dtiu(t)
untuk i = 0, 1, . . . , (n− 1). Bila dijumlahkan semua persamaan ini, diperoleh:
dn
dtn
(
qnz + qn−1z(t) + . . .+ q1dn−1
dtn−1 z(t))
+ . . .+
+pn
(
qnz + qn−1z(t) + . . . + q1dn−1
dtn−1 z(t))
= qnu+ q1u(t) + . . .+ q1dn−1
dtn−1u(t)
(6.17)
Bila dibandingkan (6.14) dengan (6.17), diperoleh penyelesaian tunggal y(t) pada (6.14)dengan semua nilai awal semua derivatif y(t) sama dengan nol adalah qnz+qn−1z(t)+ . . .+
q1dn−1
dtn−1 z(t). Jadi dalam hal ini realisasi dari h(s) = q(s)p(s)
dengan fariabel keadaan
z(t)z(t)
...dn−1
dtn−1z(t)
diberikan oleh
A =
0 1 0 . . . 00 0 1 . . . 0...
......
......
0 0 0 0 1−pn −pn−1 . . . −p2 −p1
, B =
00......1
danC = (qn qn−1 . . . q1)
(6.18)
Realisasi yang lain tentunya ada sebagaimana telah diuraikan pada bagian sebelumnyasuatu transformasi kordinat dalam ruang keadaan tidak akan mengubah fungsi transfer.
Realisasi yang diberikan dalam (6.18) dimanakan realisasi terkontrol baku ataubentuk kanonik terkontrol. Bentuk ini juga telah dibahas pada bagian 4.4 dengannama bentuk kompanion. Prosedur untuk memperoleh suatu realisasi diatas bisa di-lakukan dengan menggunakan suatu diagram alir, berikut ini diberikan suatu diagram
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

146 Penyajian masukan/keluaran..
∫
∫∫
q2
q1
q0
-p2
-p1
-p0
+
+u z(3) z(2) z(1) z
y
Gambar 6.5: Diagram realisasi.
yang menjeleskan realisasi dari suatu fungsi transfer, khusus untuk n = 3. Notasi z(i)(t)yang digunakan dalam Gambar 6.5 mempunyai arti derivatif ke-i dari z(t).Dalam diagram Gambar 6.5 kotak
∫
menyatakan integral yang merupakan notasi singkat
dari sistem x(t) = u(t); y(t) = x(t) dengan fungsi transfer 1s
sedangkan masing-masingkotak −pi dan qi menyatakan perkalian dengan koefisien didalam kotak tsb. Diagrammenunjukkan juga bagaimana sistem bisa direalisasi dalam praktis (dibangun) bila dipun-yai perangkat dalam bentuk blok-blok yang berupa integral, tambah dan kali. Hal inisama dengan apa yang digunakan dalam komputer analog. Secara khusus dapat jugamengimplementasi atau membentuk sistem ini melalui differensiator.Disain ini atau di-agram alir diantara u(t) dan z(t) diberikan dalam Gambar 6.6.
∫∫
∫
-p2
-p1
-p0
+u z(3) z(2) z(1) z
Gambar 6.6: Diagram differensiator.
Oleh karena itu dengan menggunakan superposisi diperoleh diagram yang diberikan olehGambar 6.7.
Diagram terakhir juga menguraikan sistem yang dikarakteristikan oleh h(s) = q(s)p(s)
. Pada
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Fungsi transfer dan matriks transfer.. 147
∫ ∫∫
-p2
-p1
-p0
+u
q0
q1
q2
ddt
ddt
ddt
q0z + q1z + q2z = y
Gambar 6.7: Diagram superposisi.
diagram ini telah digunakan blok ddt
differensiator. Sebagaimana diketahui secara teknikdifferensiator sulit dibangun. Sebagai penggantinya lebih disukai menggunakan integratorsebab integrator ini mudah direalisasikan.
Contoh 45 Dalam Contoh 44 telah dikaji suatu masalah bentuk sistem dinamik satelittelah dikaji dengan fungsi transfer
s2 − 3
s4 + s2.
Suatu realisasi dari fungsi ini adalah:
x(t) =
0 1 0 00 0 1 00 0 0 10 0 −1 0
x(t) +
0001
u(t)
dany(t) =
(
−3 0 1 0)
x(t).
�
Berikut ini akan diberikan bentuk khusus lain suatu realisasi dari fungsi transfer dinamakanbentuk kanonik teramati yang tidak dikaji secara intensive. Disini fungsi transfer yangdikaji diberikan dalam persamaan (6.7) hanya untuk q0 = 0; realisasi dari fungsi transfertsb. diberikan oleh:
A =
−pn 1 0 . . . 0−pn−1 0 0 . . . 0
......
......
−p2 0 0 . . . 1−p1 0 0 0 0
, B =
qnqn−1
...q2q1
, C = (1 0 0 . . . 0). (6.19)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono
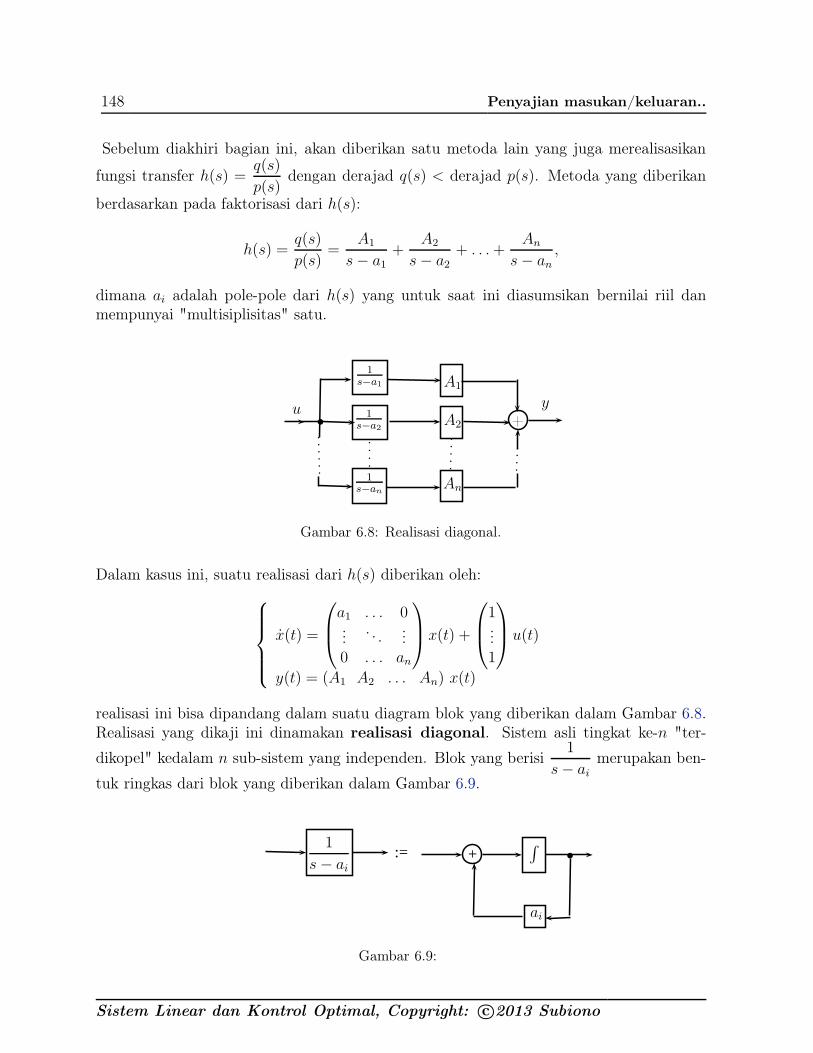
148 Penyajian masukan/keluaran..
Sebelum diakhiri bagian ini, akan diberikan satu metoda lain yang juga merealisasikan
fungsi transfer h(s) =q(s)
p(s)dengan derajad q(s) < derajad p(s). Metoda yang diberikan
berdasarkan pada faktorisasi dari h(s):
h(s) =q(s)
p(s)=
A1
s− a1+
A2
s− a2+ . . .+
An
s− an,
dimana ai adalah pole-pole dari h(s) yang untuk saat ini diasumsikan bernilai riil danmempunyai "multisiplisitas" satu.
+yu
A1
A2
An
1s−a1
1s−a2
1s−an
Gambar 6.8: Realisasi diagonal.
Dalam kasus ini, suatu realisasi dari h(s) diberikan oleh:
x(t) =
a1 . . . 0...
. . ....
0 . . . an
x(t) +
1...1
u(t)
y(t) = (A1 A2 . . . An) x(t)
realisasi ini bisa dipandang dalam suatu diagram blok yang diberikan dalam Gambar 6.8.Realisasi yang dikaji ini dinamakan realisasi diagonal. Sistem asli tingkat ke-n "ter-
dikopel" kedalam n sub-sistem yang independen. Blok yang berisi1
s− aimerupakan ben-
tuk ringkas dari blok yang diberikan dalam Gambar 6.9.
1
s− ai:= +
∫
ai
Gambar 6.9:
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Fungsi transfer dan matriks transfer.. 149
Bila p(s) = 0 mempunyai akar-akar real dengan multisiplisiti lebih besar dari satu, mis-alkan s = a dengan multisiplisiti dua, maka faktorisasinya diberikan oleh:
h(s) =A
s− a+
B
(s− a)2+ . . .
1
s− a
1
s− a
x1 x2
+
A
B
Gambar 6.10:
Suku-suku diatas secara bersama dapat direalisasikan seperti diberikan dalam Gam-bar 6.10. Bila keluaran dari dua blok integrator dalam Gambar 6.10 berturut-turut dino-tasikan dengan x1(t) dan x2(t), maka suatu realisasi ruang keadaan dari bentuk
A
s− a+
B
(s− a)2
diberikan oleh:(
x1(t)x2(t)
)
=
(
a 10 a
)(
x1(t)x2(t)
)
+
(
01
)
u(t); y(t) = (B A)
(
x1(t)x2(t)
)
.
Terlihat bahwa matriks sistemnya adalah suatu blok Jordan berukuran 2× 2.Bila dalam faktor-faktor p(s) berbentuk s2 + bs+ c dengan b2 − 4ac < 0, maka dekom-
posisi kedalam suatu faktor riil adalah tidak mungkin. Contoh berikut memberikan suatukemungkinan diagram alir dari kasus ini. Misalkan diberikan fungsi transfer berbentuk:
h(s) =s+ 2
s2 + 2s+ 5.
Penyebut dari h(s) tidak dapat dikomposisi kedalam faktor-faktor riil. Oleh karena h(s)dapat ditulis sebagai:
h(s) =s+ 2
s2 + 2s+ 5=
1
s+ 1
1 +22
(s+ 1)2
+1
2
2
(s+ 1)2
1 +22
(s+ 1)2
,
sedangkan diagram alirnya diberikan dalam Gambar 6.11.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

150 Penyajian masukan/keluaran..
+ +u y
21
2
-2
x2
x11
s+ 1
1
s+ 1
Gambar 6.11:
Bila keluaran dari blok integrator dalam Gambar 6.11 berturut-turut dinotasikan denganx1 dan x2, maka realisasi ruang keadaannya diberikan oleh:
(
x1(t)x2(t)
)
=
(
−1 2−1 −1
)(
x1(t)x2(t)
)
+
(
01
)
u(t); y(t) = (1
21)
(
x1(t)x2(t)
)
.
Latihan 35 Suatu sistem linear mempunyai fungsi transfer
H(s) =4s3 + 25s2 + 45s+ 34
2s3 + 12s2 + 20s+ 16.
Dapatkan suatu realisasi dari fungsi transfer tsb. dalam bentuk kanonik-terkontrol dankanonik-teramati.
Latihan 36 Bila pasangan tripel matriks {A,B,C} dengan ukuran masing-masing n ×n, n× 1 dan 1× n adalah suatu realisasi dari suatu fungsi transfer q(s)
p(s). Tunjukkan bahwa
derajad dari q(s) = m bila dan hanya bila CAiB = 0, i = 0, 1, 2, . . . , n − m − 2 danCAn−m−1B 6= 1.
�
6.3 Realisasi minimal
Pada bagian ini dikaji suatu realisasi dari fungsi tranfer yang mempunyai dimensi ruangkeadaan minimal, realisasi yang demikian dinamakan realisasi minimal. Berikut inidiberikan suatu sifat dari realisasi minimal untuk sistem masukan tunggal dan keluarantunggal.
Teorema 20 Suatu realisasi ruang keadaan dari fungsi transfer h(s) =q(s)
p(s)terkontrol
dan teramati bila dan hanya bila q(s) dan p(s) tidak mempunyai faktor persekutuan.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Realisasi minimal.. 151
BuktiBukti diberikan hanya untuk fungsi-fungsi transfer dengan realisasi diagonal, yaitu matrikssistem A diagonal. Perhatikan realisasi diagonal yang diberikan oleh:
A =
λ1 . . . 0...
. . ....
0 . . . λn
, B =
b1...bn
, C = (c1 . . . cn). (6.20)
realaisasi ini bersesuaian dengan fungsi transfer
h(s) =q(s)
p(s)=
n∑
i=1
gis− λi
,
dengan skalar bi, ci dan gi memenuhi bici = gi. Matriks terkontrol Mc diberikan oleh:
Mc =
b1 b1λ1 b1λ21 . . . b1λ
n−11
b2 b2λ2 b2λ22 . . . b2λ
n−12
......
......
...bn−1 bn−1λn−1 bn−1λ
2n−1 . . . bn−1λ
n−1n−1
bn bnλn bnλ2n . . . bnλ
nn
,
determinan dari Mc adalah:
detKtr = det
1 λ1 λ21 . . . λn−11
1 λ2 λ22 . . . λn−12
......
......
...1 λn−1 λ2n−1 . . . λn−1
n−1
1 λn λ2n . . . λnn
n∏
i=1
bi
=∏
1≤i<j≤n
(λj − λi).
(6.21)
Determinan bagian sebelah kanan persamaan (6.21) disebut determinan Van der Monde.Jadi detKtr 6= 0 bila dan hanya bila λi 6= λj untuk semua i 6= j dan bi 6= 0 untuk semuai. Pernyataan yang terakhir cukup jelas, bila belaku sebaliknya yaitu bila bi = 0 untukbeberapa i maka komponen ke-i tidak dibangkitkan oleh masukan dan tidak dapat beradapada ruang bagian terkontrol. Jadi realisasi (6.20) terkontrol bila dan hanya bila λi 6= λjuntuk semua i 6= j dan bi 6= 0 untuk semua i. Dengan argumentasi yang sama dapat ditun-jukkan realisasi teramati bila dan hanya bila λi 6= λj untuk semua i 6= j dan ci 6= 0 untuksemua i. Untuk suatu realisasi bentuk (6.20) terkontrol dan teramati, dipunyai bi 6= 0 danci 6= 0, oleh karena itu gi 6= 0. Ini berarti tidak ada faktor persekutuan dalam h(s).
Sebaliknya, misalkan q(s) dan p(s) tak mempunyai faktor persekutuan dan andaikanrealisasi (6.20) tak-terkontrol atau tak teramati. Maka dari itu detKtr = 0; jadi λi =
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

152 Penyajian masukan/keluaran..
λj untuk beberapa i, j atau bi = 0 untuk beberapa i. Hal ini menjukkan bahwa q(s)dan p(s) mempunyai faktor persekutuan. Kenyataan ini bertentangan dengan hipotesabahwa dalam h(s) tak ada faktor persekutuan. Jadi haruslah realisasi (6.20) terkontroldan teramati.
�
Contoh 46 Diberikan sistem
x(t) =
1 2 −10 1 01 −4 3
x(t) +
001
u(t), y(t) = (1 − 1 1)x(t). (6.22)
Matrik ketrkontrolan Mc dan keteramatan Mo, berturut-turut diberikan oleh:
Mc =
0 −1 −40 0 01 3 8
,Mo =
1 −1 12 −3 24 −7 4
Kedua matriks Mc danMo adalah singulir. Bahkan bila hanya satu saja dari kedua matrikstsb. singulir sudah cukup untuk menyimpulkan bahwa fungsi tranfer dari sistem (6.22).Fungsi transfernya adalah:
h(s) =(s− 1)(s− 2)
(s− 1)(s− 2)2=
1
s− 2.
Jadi, perilaku masukan-keluaran sistem direalisasikan oleh (6.20) dengan ruang keadaanberdimensi tiga juga dapat direalisasikan oleh ruang keadaan berdimensi satu. Realisasiini adalah:
x(t) = 2x(t) + u(t), y(t) = x(t).
Realisasi yang terakhir tsb. adalah realisasi minimal.
�
6.4 Metoda Frekuensi
Pada bagian ini tetap dibatasi pembahasan untuk sistem dengan masukan dan keluarantunggal, oleh karena itu fungsi transfernya dinotasikan dengan h(s). Untuk suatu responfrekuensi ditulis:
h(iω) = |h(iω)| ei arg h(iω).Respon stasioner dari u(t) = uωe
iωt, uω, ω ∈ R adalah:
y(t) = h(iω)uωeiω = |h(iω)|uωei(ωt+arg h(iω)).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Metoda Frekuensi.. 153
Bila diambil bagian imajiner dari u(t):
Im (u(t)) = uω sin(ωt+ φ) = Im(
uωeiφeiωt
)
respon stasionernya menjadi:
Im (y(t)) = Im(
h(iω)uωeiφeiωt
)
= Im(
|h(iω)|uωei(ωt+φ+arg h(iω)))
= |h(iω)|uω sin (ωt+ φ+ arg h(iω)) .(6.23)
Terlihat, respon stasionernya berbentuk sinus dengan amplitudo |h(iω)|uω. Phase dariossilasi bertambah sebesar arg h(iω). Jadi, sistem linear invarian-waktu dengan fungsitransfer h(s) mentransformasi suatu signal sinusiodal dengan frekuensi ω kebentuk signalsinusiodal yang lain dengan frekuensi ω, amplitudonya menjadi amplitudo asal dikalikandengan |h(iω)| dan phasenya bertambah sebesar arg h(iω).
Contoh 47 Dikaji lagi contoh rangkaian elektrik RLC yang diberikan dalam Contoh 4.Bentuk ruang keadaan sistem diberikan oleh:
(
x1(t)x2(t)
)
=
(
0 1C
− 1L
−RL
)(
x1(t)x2(t)
)
+
(
01L
)
u(t),
dimana masukan sistem u(t) = e(t). Fungsi transfer sistemnya adalah:
h(s) = C(sI − A)−1B =1
LCs2 +RCs+ 1.
Jadi h(iω) = 1−LCω2+1+iRCω
. Pole-pole dari h(s) adalah akar-akar dari s2 + RL+ 1
LC= 0.
Dapat ditunjukkan bahwa kedua polenya mempunyai bagian ril negatif, jadi
y(t) ∼ |h(iω)|uω sin (ωt+ φ+ arg h(iω)) ,
bila digunakan signal masukan uω sin(ωt+ φ), diperoleh:
|h(iω)| =1
√
(1− LCω2)2 +R2C2ω2
arg h(iω) = arctan
( −RCω1− LCω2
)
.
Secara lebih umum, bila suatu signal kombinasi dari sinusiodal dengan frekuensi yangmemunkinkan berbeda dikenakan pada sistem, maka keluaran merupakan signal kom-bianasi sinusiodal tang lain dengan frekuensi sama dengan frekuensi masukan.
�
Fungsi-fungsi respon frekuensi sering digunakan dalam analisa jaringan, kontrol otomatikdan akustik. Ada dua metoda yang dikenal untuk secara grafik menampilkan h(iω)guna memperoleh kesan dari perilaku sistem yang dikaji. Dua moteda ini secara singkatdidiskusikan.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

154 Penyajian masukan/keluaran..
1. Diagram Nyquist atau plot polar. Fungsi h(iω) diplot sebagai kurva dalam bidangdengan parameter ω yang bervariasi dari 0 sampai +∞. Bila dilihat h(s) sebagaifungsi dari bidang kompleks ke bidang kompleks, maka diagram Nyquist adalah "im-age" dari h pada sumbu imajiner positif.
2. Diagram Bode atau diagram logarithma. Dalam hal ini h disajikan oleh dua grafikyaitu plot amplitudo: ln |h(iω)| sebagai fungsi dari lnω dan plot phase: arg(h(iω))sebagai suatu fungsi lnω.
0
Im
u = 4
u = 2 u = 1u = .5
1
u = 0Re
2010 log |iω|Amplitudo (dB)
u = Tω0.01 0.1 1
-20
-40
0
phase (0)
0
arg(h(iω))
-300
-600
-900
0.01 0.1 1
u = Tω
asimtot
Gambar 6.12: Diagram Nyquist dan Bode.
Sebagai contoh, pada Gambar 6.12 diagram Nyquist dan Bode dari sistem dengan fungsitransfer 1
1+τs, τ > 0. Skala ln |h(iω)| diungkapkan dengan decibel (dB). Grafik |h(iω)|
"versus" ω mengungkapkan yang dapat melewati sistem dan gain. Jadi sistem dapatdiinterpretasikan sebagai suatu filter dari signal masukan.
B
|h|
0 ω
|h|
0 ω
gain
|h|
0 ω
B
|h|
0 ω
Gambar 6.13: Filter frekuensi rendah.
Dalam gambar yang pertama dari Gambar 6.13 hanya frekuensi-frekuensi rendah yang akan
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Metoda Frekuensi.. 155
melewati sistem, sedangkan frekuensi-frekuensi tinggi dipotong. Filter-filter yang demikiantadi dinamakan suatu filter frekuensi rendah. Gambar-gambar yang lain menunjukkanmacam-macam filter yang lain. Bandwidth B dari suatu sistem didefinisikan sebagairange dari frekuensi signal masukan yang mana respon sistem akan memuaskan.
Berikut ini diuraikan suatu pemakaian sederhana dari suatu filter frekuensi rendah(lihat Gambar 6.13). Misalkan suatu signal gangguan yang biasanya merupakan signal-signal frekuensi tinggi. Bila diinginkan membersihkan gangguan ini, bisa digunakan suatufilter frekuensi rendah. Sebagai akibatnya, bagian signal keluran yang berkaitan denganfrekuensi tinggi dapat dihentikan.
+
-
U(s) Y (s)H2(s) H1(s)
Gambar 6.14:
Contoh 48 Tinjau konfigurasi sistem umpan balik berikut yang diberikan oleh Gam-bar 6.14. Dalam Gambar 6.14, sistem dengan fungsi transfer H1(s) biasanya dinamakanplan. Diinginkan mendisain suatu kontroler H2(s) sedemikian hingga keseluruhan sistemumpan balik mempunyai karakteristik yang menyenangkan. Kontroler yang dikarakteristikoleh fungsi transfernya bisa dipilih oleh disainer. Bisa ditunjukkan bahwa fungsi transferkeseluruhan sistem umpan balik diberikan oleh:
H(s) = (I +H1(s)H2(s))−1H1(s)H2(s).
Suatu kriteria disain yang mungkin adalah Y (s) sedapat mungkin mendekati U(s). Halini dinamakan "tracking". Suatu kemungkinan untuk memperoleh suatu sistem track-ing yang baik adalah mendisain H2(s) dengan suatu cara sehingga H1(s)H2(s) "besar",maka dari itu (I +H1(s)H2(s))
−1H1(s)H2(s) ∼ I, hal ini berakibat Y (s) ∼ U(s). Untukfrekuensi yang dipertimbangkan s diganti dengan iω, didefinisikan S(ω) sebagai:
S(ω) = (I +H1(iω)H2(ω))−1 ,
S(ω) dinamakan operator sensitifitas. Suatu sistem dikatakan mempunyai karakterisitiksensitifitas yang baik bila
(I +H1(iω)H2(ω)) ≥ φ(ω)
untuk semua |ω| ≤ ω0 (bandwidth yang diingini), dimana φ(ω) adalah suatu fungsi positipyang bernilai besar.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

156 Penyajian masukan/keluaran..
Contoh 49 Masalah differensiator, misalkan y(t) = du(t)dt, t ∈ R, maka untuk u(0) = 0
diperoleh:
Y (s) =
∞∫
0
e−stdu(t)
dtdt = u(t)e−st
∣
∣
∞0+ s
∞∫
0
u(t)e−stdt = sU(s).
Fungsi transfernya adalah h(s) = s, dalam hal ini derajad dari pembilang lebih besardari penyebutnya, yaitu sistem adalah tak-kausal. Sistem semacam ini secara teknik tidakbisa direalisasikan, sebab bila u(s) diketahui sampai saat waktu t, maka derifatif padatitik akhir s = t tidak ada. Selanjutnya karena |h(iω)| = |ω| ini berarti frekuensi tinggidikenakan terus menerus dengan phase arg(iω) = π
2untuk semua frekuensi.
�
Berikut ini ditinjau persamaan (6.6) dengan umpan balik H2(s) = I dan H1(s) merepre-sentasikan sistem masukan-keluaran tunggal, oleh karena itu diganti H1(s) dengan h1(s).Diasumsikan fungsi transfer h(s) "sejati kuat" dan tidak mempunyai pole pada sumbuimajiner, asumsi yang akhir ini tidak begitu esensial tetapi hal ini hanya sekedar untukpenyederhanaan. Persamaan (6.6) menjadi:
h(s) =h1(s)
1 + h1(s).
Tinjau pemetaan ω 7→ h(iω), dimana −∞ < ω < +∞ dan h(iω) adalah suatu kurva dalamdomain kompleks. Untuk ω = −∞ kurva dinotasikan dengan Γ, dimulai dari titik asal,dan untuk ω = +∞ kurva berakhir pada titik asal lagi. Oleh karena itu titik asal terletakdidalam kurva tertutup Γ.
Teorema 21 Dengan formulasi asumsi diatas, banyaknya putaran mengelilingi titik −1oleh kurva tutup Γ searah dengan putaran jarum jam sama dengan banyaknya pole-poletak-stabil dari sistem loop-tutup dikurangi banyaknya pole-pole tak-stabil dari sistem loop-buka.
�
Sistem loop-buka adalah sistem dengan fungsi transfer h1(s), sedangkan sistem loop-tutup,merujuk pada sistem dengan umpan balik satuan I. Teorema 21 adalah versi sederhanadari teorema yang lebih umum yang dikenal dengan nama kriteria Nyquist yang bisadigunakan untuk mengecek apakah sistem loop-tutup stabil.
Disini tidak diberikan bukti kriteria Nyquist. Kriteria ini berdasar pada teorema Teo-rema Cauchy dalam teori fungsi kompleks. Berikut ini, diberikan teorema Cauchy.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Metoda Frekuensi.. 157
Teorema 22 Asumsikan bahwa h suatu fungsi rasional atau lebih umumnya suatu fungsi"meromorphic" yang tak mempunyai pole atau zeros pada suatu kurva tutup sederhana C.Lagipula diasumsikan bahwa putaran pada C searah jarum jam. Maka integral berikut:
1
2π
∫
C
d
dsh(s)
h(s)ds
sama dengan banyaknya pole-pole dalam C dikurangi banyaknya zeros dalam C.
�
Pembatasan umpan balik adalah I bukan dimaksudkan untuk membatasi kajian, sebagaimana yang terlihat berikut ini. Untuk umpan balik h2(s), persamaan (6.6) menjadi:
h(s) =h1(s)
1 + h1(s)h2(s)=
h1(s)h2(s)
1 + h1(s)h2(s)h−12 (s)
terlihat bahwa ungkapan diatas sebagai suatu sistem seri dari dua subsistem yang dikarak-teristik masing-masing oleh h1h2(1+ h1h2)
−1 dan h−12 asalkan keduanya terdefinisi dengan
baik. Subsistem yang pertama adalah suatu sistem yang dikarakteristik oleh h1h2 dengansuatu umpan balik I. Jadi kajian kestabilan dari suatu sistem dengan umpan balik bukanI bisa ditransformasi ke kajian kestabilan suatu sistem dengan umpan balik I dengantambahan persyaratan bahwa sistem yang dikarakteristik oleh h−1
2 ada.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

158 Penyajian masukan/keluaran..
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bab 7Kontrol Optimal
Dalam kajian teknik pendisainan kontroler umpan balik sistem banyak masukan banyakkeluran bertujuan untuk memperoleh perilaku sifat-sifat sistem, misalnya kestabilan, ke-tepatan keadaan stedi dan yang lainnya.
Kontrol umpan balik adalah mekanis dasar dimana sistem-sistem; sistem mekanik, sis-tem elektrik atau sistem biologi diupayakan kestabilannya. Dalam berbagai bentuk ke-hidupan yang lebih tinggi, kondisi dimana kehidupan dapat bersinambung sungguh tidakluas. Perubahan temperatur dalam badan dari separuh tingkatan umumnya menunjukkansuatu tanda kegagalan. Kestabilan dari badan dipertahankan dengan menggunakan man-faat kontrol umpan balik [Wiener 1948]. Kontribusi utama dari C.R. Darwin adalah teoriumpan balik pada periode yang lama merupakan suatu faktor kunci evolusi species. Padatahun 1931 V. Volterra menerangkan keseimbangan diantara dua populasi ikan denganpemanfaatan teori umpan balik ada kesetaraan.
Kontrol umpan balik dapat didefinisikan sebagai pemanfaatan beda signal yang di-tentukan oleh perbandingan nilai-nilai aktual dari fariabel sistem dengan nilai-nilai yangdiharapkan, beda ini mempunyai arti sebagai pengontrolan sistem. Contoh yang dijumpaisehari-hari dari suatu sistem kontrol umpan balik adalah suatu kontrol kecepatan mobil.
Dalam suatu sistem kontrol industri biaya pembuatan suatu sistem kontrol di buat seke-cil mungkin dengan tetap mencapai suatu tujuan keuntungan dalam sistem kontrol industritersebut. Praktisnya faktor-faktor ekonomi mengkompromikan penyelesaian masalah pen-gontrolan agar dalam pembuatannya secara wajar, murah dengan tetap memenuhi suatukriteria tertentu dari perilaku sistemnya.
7.1 Sejarah ringkas kontrol otomatik
Kontrol umpan balik adalah suatu ilmu disiplin teknik. Sebagaimana kemajuannya mem-punyai ikatan dekat dengan masalah-masalah praktis yang ingin diselesaikan selama phasesejarah kehidupan manusia. Perkembangan dalam sejarah kehidupan ummat manusia yang
159

160 Kontrol Optimal..
berdampak terhadap kemajuan kontrol umpan balik dapat diuraikan dalam beberapa phaseberikut:
1. Bangsa Yunani dan Arab dengan ketekunannya meneliti hal-hal berkenaan dengankeakuratan lintasan waktu. Hal ini terjadi diantara periode tahun 300 sebelummasehi dan 1200 masehi.
2. Revolusi industri di Eropah. Secara umum revolusi ini diakui sudah dimulai sejaksekitar tahun 1875an; walaupun begitu yang mendasarinya bisa dilacak kembali ketahun 1600.
3. Permulaan komunikasi massa serta kejadian perang dunia I dan II. Terjadi diantaraperiode 1910 sampai dengan 1945.
4. Permulaan perjalanan manusia ke ruang angkasa dan awal manusia mengenal kom-puter pada tahun 1957an.
Bila diperhatikan phase-phase diatas dalam perkembangan kehidupan manusia, per-tama mereka menaruh perhatian untuk mengerti posisi tempat kehidupannya dalam kait-annya dengan ruang dan waktu, kemudian dengan pemilihan waktu di lingkungannyamembuat eksistensi kehidupan mereka lebih nyaman. Selanjutnya mereka mencoba ke-hidupan posisi tempat tinggalnya didalam kaiatannya dengan suatu komuniti global yangakhirnya menempatkan kehidupan mereka dalam suatu era kosmos.
Diantara revolusi industri dan perang dunia, telah terjadi suatu perkembangan yangsangat penting untuk diketahui, yaitu teori kontrol yang mulai ditulis dalam bahasa matem-atik. J.C. Maxwell penulis pertama yang dengan teliti menulis tentang analisa matematikyang berkenaan dengan suatu sistem kontrol umpan balik pada tahun 1868. Periode se-belum tahun ini dinamakan "periode sebelum" kontrol otomatik.
Friedland [1986] juga melakukan hal yang serupa, selanjutnya periode yang dihasilkandiantara tahun 1868 dan menjelang awal tahun 1900an dimanakan periode "primitive"kontrol otomatik. Sedangkan periode sampai tahun 1960an dinamakan periode "klasik"kontrol otomatik. Setelah itu mulai dari 1960 sampai saat ini dimakan periode "modern"kontrol otomatik.
Berikut ini diberikan contoh-contoh yang menunjutkan perkembangan optimal kontroldari waktu ke waktu.
Jam air bangsa Yunani dan Arab
Motifasi utama kontrol umpan balik jam antik adalah kebutuhan untuk menentukan keaku-ratan waktu. Sekitar tahun 270 sebelum masehi Ktesibios orang Yunani menemukan suaturegulator apung untuk suatu jam air. Fungsi dari regulator ini menjaga level air dalamtangki pada kedalaman konstan. Kedalaman konstan ini menghasilkan suatu aliran airkonstan melewati suatu tabung pada dasar tangki yang diisikan pada tangki kedua dengankecepatan tetap. Jadi level air pada tangki kedua tergantung pada waktu yang dilalui.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Sejarah ringkas kontrol otomatik.. 161
Regulator Ktesibios menggunakan suatu "pengampung" untuk mengontrol perpinda-han air melewati suatu katup. Ketika level air yang diingini tercapai, katup membuka danmengisi tandon air. Fungsi dari regulator apung ini seperti bola dan keran pada pembi-lasan toilet modern. Suatu regulator apung telah digunakan oleh Philon dari Byzantiumpada tahun 250 sebelum masehi untuk menjaga level minyak dalam lampu konstan.
Pada abad pertama, Heron dari Alexandria mengembangkan regulator apung untukjam air. Bangsa Yunani menggunakan ragulator apung dan perangkat serupa untuk tujuanpengisian anggur secara otomatis, pembukaan pintu candi dsb. Perangkat ini dinamakanperangkat yang "praktis" dikarenakan perangkat tsb. adalah contoh-contoh awal daripemikiran terapan.
Pada tahun 800 sampai 1200 berbagai teknisi bangsa Arab seperti, tiga bersaudara Al-Jazari, Musa dan Ibn al-Sa’ati menggunakan regulator apung untuk jam air dan terapaanyang lainnya. Selama periode ini, umpan balik penting prinsip kontrol "on/off" digunakanyang mana hal ini bertalian dengan masalah waktu minimum.
Saat Bagdad jatuh ketangan bangsa Mongolia pada tahun 1258, semua pemikiran kre-atif sepajang yang telah ada menjadi suatu akhir. Selain itu, penemuan jam mekanik padaabad empat puluhan membuat jam air dan kontrol umpan baliknya menjadi tidak terpakaisebab jam mekanik bukan sistem umpan balik. Regulator apung tidak nampak lagi sampaidi gunakan lagi pada revolusi industri.
Sepanjang manusia menaruh perhatian pada posisi tempatnya dalam waktu, manusiaawalnya menaruh perhatian posisi tempatnya pada ruangan. Sistem kontrol umpan balik- pseudo telah dikembangkan di China pada abad dua belas untuk tujuan navigasi. Keretaperang "berposisi-keutara" memuat suatu patung digerakan oleh "gear" mekanis yang di-hubungkan ke roda kereta sedemikian hingga posisi kereta secara sinambung menghadapkeutara. Dengan menggunakan informasi arah yang tersaji melalui patung pembawa keretabisa menyetir kemudi sesuai arahnya. Hal ini disebut sistem kontrol umpan balik - pseudosebab secara teknik tidak mencakup umpan balik, kecuali tindakan dari pembawa keretadipertimbangkan sebagai bagian dari sistem. Jadi ini bukan suatu sistem kontrol otomatik.
Revolusi industri
Revolusi industri di Eropah diikuti pengenalan "penggerak utama" atau mesin bertenagasendiri yang ditandai oleh penemuan terdahulu, yaitu penggiling butir padi, tungku pem-bakaran, boiler dan mesin uap. Perangkat ini tidak memadai diatur dengan tangan se-hingga dibangun suatu alat bantu baru untuk sistem otomatik. Berbagai perangkat kontroldiciptakan, yaitu regulator apung, regulator temperatur, regulator tekanan dan perangkatkontrol kecepatan.
J. Watt menemukan mesin uap pada tahun 1769, hari penemuan ini ditandai sebagaipermulaan revolusi industri. Walaupun akar dari revolusi industri dapat dilacak kembalike tahun 1600an atau lebih awal dengan perkembangan penggiling butir padi dan tungkupembakaran.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

162 Kontrol Optimal..
Juga disadari temuan yang lain, mesin uap pertama yang diciptkan oleh T. Newcomenpada tahun 1712. Walaupun mesin uap ini tak effisien dan masih diatur oleh tangan, mesinuap ini sudah agak cocok digunakan dalam industri. Suatu hal penting perlu diketahuibahwa penemuan mesin-mesin yang lebih baik dan sistem kontrol otomatik, juga penemuanmesin-mesin yang teratur bukan awal dari revolusi industri. Tetapi kedatangan perangkatkontrol umpan balik benar-benar merupakan suatu tanda awal dari revolusi industri.
Regulator temperaturCornelis Drebbel dari Belanda meyisikan sebagian waktunya di Inggris dan sebagiannyalagi di Prague bersama the Holy Roman Emperor Rudolf II dan J. Kepler. Sekitar 1624,Cornelis Drebbel sistem kontrol temperatur otomatik untuk tungku pembakaran. Halini dilakukan dengan motifasi kepercayaannya bahwa timah dapat diubah menjadi emasdengan cara membakar timah tsb. pada temperatur konstan yang tepat dengan periodewaktu yang lama. Ia menggunakan regulator temperatur ini dalam suatu inkubator untuktempat penetasan ayam.
Regulator temperatur dikaji oleh J.J Becher pada 1680, dan digunakan lagi inkubatoroleh the Prince de Conti dan R.-A.F. de Réamur pada 1754.
Regulator apung
Pengaturan level suatu cairan dibutuhkan dalam dua area utma pada tahun 1700anyaitu: dalam mesin uap boiler dan sistem distribusi air domistik. Oleh karena itu regulatorbanyak diminati, terutama di Inggris.
W. Salmon dalam bukunya tahun 1746, mencantumkan harga dari regulator apungbola-keran yang di gunakan untuk menangani level air bak-tampung suatu rumah. Regu-lator ini dipatenkan pertama kali untuk pembilasan toilet sekitar 1775. Pembilasan toiletberikutnya diperhalus oleh Thomas Crapper seorang ahli pipa. Atas hasil ciptaannya iniia diberi gelar bangsawan oleh ratu Victoria.
Suatu hasil paten yang menguraikan temuan lebih awal tentang regulator katup apungdalam boiler uap oleh J. Briendley pada 1758. Ia menggunakan regulator tsb. dalam mesinuap untuk memompa air. S.T. Wood menggunakan suatu regulator untuk suatu mesin uapdalam pembuatan bir pada 1784. I.I. Pulzunov orang Siberia, mengembangkan suatu reg-ulator apung dalam mesin uap yang memutar kipas untuk meniup tungku pembakaran.Pada tahun 1791, regulator tsb. dipakai oleh perusahaan Boulton dan Watt digunakansebagai mesin uap yang lazim.
Regulator tekanan
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Sejarah ringkas kontrol otomatik.. 163
Masalah lain yang berkaitan dengan mesin uap adalah regulator tekanan-uap dalamboiler. Tekanan uap yang menggerakkan mesin diatur dengan tekanan konstan. Pada1681 D. Papin menciptakan suatu katup aman untuk tekanan pada alat masak digunakantahun 1707an sebagai suatu perangkat atur pada mesin uap tsb. Kemudian alat ini menjadimesin uap standar.
Selanjutnya, regulator tekanan ini diperhalus oleh R. Delap dan M. Murray tahun 1799.Tahun 1803, regulator tekanan dikombinasi dengan regulator apung oleh Boulton dan Wattuntuk digunakan dalam mesin uap.
Alat pengatur sentrifugal
Mesin uap pertama menyajikan suatu perbandingan terbalik gerakan keluaran yangdiatur menggunakan suatu alat yang dikenal dengan nama "cataract" serupa dengan suatukatup apung. Cataract ini asalnya digunakan sebagai mesim pompa di tambang batu baraCornwall.
Mesin uap James Watt dengan suatu gerakan keluaran berputar mencapai kesempur-naannya ketika mesin uap yang pertama dijual. Kontribusi utama dalam mesin ini adalahpenggantian cara manual oleh tenaga manusia untuk memindahkan suatu bahan yang akandigiling kedalam mesin giling. Mesin keluran berputar awalnya digunakan dalam penggilinguap Albion yang beroperasi awal tahun 1786.
Suatu masalah yang berkenaan dengan mesin uap putar adalah pengaturan kecepatan-nya. Oleh karena itu beberapa teknologi pengaturan kecepatan dari mesin giling telahdikembangkan dan diperluas untuk tujuan tsb. Pada tahun 1788 James Watt telah me-lengkapi pendisainan alat pengatur sentrifugal dengan menggunakan dua "bola-terbang"untuk mengatur kecepatan mesin uap putar. Perangkat ini menggunakan dua pivot yangdihubungkan dengan baling-baling untuk memutar bola yang oleh gaya sentrifugal bola tsb.direntangkan kearah luar. Ketika kecepatan putar meningkat bola berputar dengan rentan-gan semakin melebar keluar dan posisi bola meninggi, akibatnya secara otomatis katup uapmembuka dengan demikian uap air keluar dan kecepatan putar mesin berkurang. Bila ke-cepatan putar berkurang dibawah yang dikehendaki, rentangan yang terjadi pada posisidua bola menyempit dan posisi bola turun. Hal ini menyebabkan secara otomatis katupuap menutup akibatnya tekanan uap air dalam tangki menjadi besar dengan demikiankecepatan putar mesin menjadi meningkat sampai tercapai seperti yang dikehendaki.
Perangkat umpan balik yang disebutkan sebelumnya tak jelas bekasnya atau memainkansuatu peranan yang kurang begitu berarti sebagai suatu bagian dari mesin kontrol. Dilainpihak, pengoperasian dari alat atur "bola-putar" sangat visibel dan kasat mata, prinsipkerjanya mempunyai suatu karakteristik luar biasa yang terlihat banyak mewujudkan sifatdasar di era baru industri. Karena itu, alat atur ini menggugah kesadaran para insinyurdunia dan menjadi suatu sensasi di Eropah. Mesin ini adalah mesin pertama populer yangmenggunakan prinsip kontrol umpan balik.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

164 Kontrol Optimal..
Sekitar tahun 1790 di Perancis, Périer bersaudara mengembang regalator apung untukmengontrol kecepatan mesin uap, tetapi teknik yang mereka gunakan tidak sama denganyang ada pada alat atur sentrifugal.
Lahirnya Teori Kontrol Matematika
Disaian sistem kontrol umpan balik sampai pada era Revolusi industri merupakan masacoba-coba yang kebanyakan hasil dari intuisi para insinyur. Jadi ini adalah lebih meru-pakan seni ketimbang sains. Pada pertengahan 1800an, matematik digunakan pertamakali untuk menganalisa kestabilan dari sistem kontrol umpan balik. Karena matematikadalah bahasa formal dari teori kontrol otomatik, dinamakan periode sebelum ini periode"pra-sejarah" teori kontrol.
Persamaan differensial
Pada 1840, British Astronomer Royal di Greenwich, G.B. Airy mengembangkan suatuperangkat untuk keperluan telescope. Perangkat ini adalah suatu sistem kontrol kecepatanyang terputar secara otomatik untuk mengimbangi rotasi bumi guna mengkaji bintang.Sayangnya ia menemui ketidak layakan disain kontrol umpan balik loop yang diperkenalkandalam sistem berisolasi liar. Dia adalah orang pertama yang mendiskusikan ketakstabi-lan sistem loop-tutup dan menggunakan persamaan differensial dalam penganalisaannya.Teori persamaan differensial berkembang dengan baik berkenaan dengan penemuan per-hitungan dalam differensial dan integral oleh I. Newton (1642-1727), G.W. Leibniz (1646-1716), hasil kerja Bernoulli bersaudara (akhir 1600 awal 1700), J.W. Riccati (1676-1754)dan yang lainnya. Penggunaan persamaan differensial untuk menganalisa gerakan sistemdinamik dilakukan oleh J.L. Lagrange (1736-1813) dan W.R. Hamilton (1805-1865).
Teori Kestabilan
Kerja awal analisa matematik sistem kontrol adalah berkenaan dengan persamaandifferensial. J.C. Maxwell menganalisa kestabilan dari alat atur sentrifugal [Maxwell1868]. Tekniknya melinierkan persamaan differensial gerakan untuk mendapatkan per-samaan karakteristik sistem. Ia mengkaji efek dari parameter sistem pada kestabilan danmenunjukkan sistem stabil bila akar-akar karakteristik dari persamaan karakteristik bagianriilnya negatif. Dengan hasil kerja Maxwell ini bisa dikatakan teori sistem kontrol benar-benar telah diakui. E.J. Routh menyajikan teknik perhitungan untuk menentukan kapansuatu sistem stabil [Routh 1877].
I.I. Vyshnegradsky [1877] orang Rusia, bekerja secara independen dengan Maxwell men-ganalisa kestabilan regulator dengan menggunakan persamaan differensial. Pada 1893,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Sejarah ringkas kontrol otomatik.. 165
A.B. Stodola mengkaji keteraturan turbin air dengan menggunakan teknik dari Vysh-negradsky. Ia memodelkan penggerak dinamik dan mencakup "delay" dari penggerakmekanik dalam analisanya. Dia adalah orang pertama yang menyebutkan pengertian sis-tem konstan-waktu. Tak diduga, hasil kerja Maxwell dan Routh berkenaan dengan masalahmenentukan kestabilan dari persamaan karakteristik diselesaikan secara independen olehA. Hurwitz [1895].
Kerja dari A.W. Lyapunov adalah suatu hasil yang kemungkinan berkembang dimasamendatang dalam teori kontrol. Pada tahun 1892 ia mengkaji kestabilan persamaan dif-ferensial tak-linier menggunakan pengertian "energi tergeneral". Sayang, walaupun hasilkerjanya dipakai dan dilanjutkan di Rusia, bangsa Barat tidak siap dengan hasil teori yangelegant ini, bahkan tetap tak dikenal sampai sekitar 1960an saat dimana banyak ilmuwanmenyadari hasil penting ini.
O. Heaviside seorang insinyur bangsa Inggris menemukan "Operasional Kalkulus" se-lama periode 1892-1898. Ia mengkaji perilaku transien sistem dan mengenalkan pengertianyang ekivalen dengan fungsi transfer.
Teori Sistem
Berkaitan dengan pengkajian dalam sistem yang menempatkan teori kontrol umpanbalik pada pengorganisasian pengetahuan manusia. Jadi, konsep dari suatu sistem seba-gai suatu kesatuan dinamik dengan "masukan" dan "keluaran" tertentu dihubungkan kesistem-sistem yang lain dan ke sekitar. Sistem adalah suatu prasyarat bagi perkembanganselajutnya teori kontrol otomatik. Sejarah teori sistem memerlukan kajian menyeluruhyang berdiri sendiri, sket ringkasnya sebagai berikut.
Selama abad delapan belas dan sembilan belas, hasil kerja A. Smith dalam ekonomi[The Wealth of Nations, 1776], ciptaan dari C.R. Darwin [On the Origin of Species ByMeans of Natural Selection, 1859] dan perkembangan lain dalam politik, sosiologi dll.mempunyai pengaruh besar pada kehidupan manusia. Kajian philosopi alam adalah hasilpertumbuhan dari kerja philosof bangsa Yunani dan bangsa Arab dan kontribusi yangdibuat oleh Nicholas dari Cusa (1463), Leibniz dan yang lainnya. Perkembangan yangterjadi pada abad sembilan belas, dicirikan oleh Revolusi industri dan meluasnya maknaphilosopi alam berdampak pada perubahan kepribadian manusia.
Pada awal 1900an A.N. Whitehead [1925] dengan philosopinya "Organic mechanism",L. von Bertalanffy [1938] dengan prinsip-prinsip hirarki organisasi-nya dan yang lainnyamemulai memperkenalkan "Teori sistem general". Dalam konteks ini perubahan mendasarteori kontrol dapat diteruskan.
Komunikasi massa dan sistem telepon Bell
Pada awal abad duapuluhan dari sudut pandang teori kontrol ada dua kejadian penting
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

166 Kontrol Optimal..
yaitu: perkembangn telepon dan komunikasi massa.
Analisa domain-frekuensi
Penganalisaan dengan cara matematik sistem kontrol dalam domain-waktu sampaisaat ini diselesaikan dengan menggunakan persamaan differensial. Di Laboratorium Tele-pon Bell selama 1920-an dan 1930-an, domain frekuensi yang dikembangkan oleh P.-S. de Laplace (1749-1827), J. Forier (1768-1830), A.L. Cauchy dan lainnya dieskplorasidan digunakan dalam sistem komunikasi.
Problem utama dengan pengembangan dari suatu sistem komunikasi massa yang dise-barkan dengan jarak yang begitu panjang adalah kebutuhan kebutuhan untuk secara pe-riodik menguatkan signal suara dalam lintasan telepon yang panjang. Sayang, dalam pen-guatan ini tidak hanya informasi yang dibutuhkan dikuatkan tetapi juga gangguan (noise).Jadi pendisainan penguat-ulang yang cocok adalah faktor utama yang penting.
Untuk mereduksi gangguan dalam penguat-ulang, H.S. Black mendemontrasikan kegu-naan umpan balik negatif pada tahun 1927 [Black 1932]. Masalah pendisainan adalahmemasukan suatu "phase-geser" pada frekuensi yang tepat ke dalam sistem. Peremajaanteori pendisainan penguat stabil dikembangkan oleh H. Nyquist [1932]. Ia menurunkankriteria kestabilan Nyquist nya berdasarkan plot-kutub suatu fungsi kompleks. H.W. Bodepada tahun 1938 menggunakan besar dan phase plot respon-frekuensi suatu fungsi kom-pleks [Bode 1940]. Ia menyelidiki kestabilan loop-tutup menggunakan pengertian gain danphase margin.
Perang Dunia dan Kontrol Klasik
Sebagai akibat komunikasi massa dan perkembangan yang cepat pelintasan dalam duniamenjadi kecil, ada beberapa ketegangan ketika manusia mencoba tempatnya dalam suatumasyarakat yang mendunia. Hasilnya adalah perang dunia, pada periode ini perkemban-gan sistem kontrol umpan balik menjadi bahan yang tetap bertahan.
Kontrol-kapal
Masalah utama militer selama periode perang dunia adalah pengontrolan dan navigasikapal yang mana didalam pendisainannya lebih maju. Diantaranya, pengembangan per-tama pendisainan sensor untuk tujuan kontrol loop-tutup. Pada tahun 1910, E.A. Sperrymenciptakan gyroscope yang digunakan untuk penstabilan dan pengendalian kapal dankemudian digunakan dalam pengontrolan pesawat.
N.Minorsky [1922] memasang tiga kontroler untuk pengendalian kapal, dengan demikianmenjadi kontroler proportional-integral-derivative (PID) pertama kali digunakan. Ia mem-
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Sejarah ringkas kontrol otomatik.. 167
pertimbangkan effek tak-linier dalam sistem loop-tutup.
Perkembangan senjata dan pengarahan-senapan
Masalah utama selama periode perang dunia adalah keakuratan mengarahkan senjatadiatas kapal dan pesawat yang bergerak. Dengan dipublikasikannya "Theory of Servomech-anism" oleh H.L. Házen [1934], ia telah memprakarsai pemanfaatan teori kontrol dalammasalah tsb. Dalam papernya, menciptakan dunia servomekanik yang merupakan suatuhubungan "master-slave" dalam sistem.
Laboratorium Radiasi MIT
Mengkaji pengontrolan dan masalah pemrosesan informasi yang berkaitan dengan pen-emuan radar terbaru, telah dilakukan pada Laboratorium Radiasi di Institut Teknologi,Massachusetts tahun 1940. Banyak kerja dalam teori kontrol selama tahun 1940-an di-hasilkan dari laboratorium ini.
A.C. Hall mengenali dampak kerusakan dari pengabaian gangguan dalam disain sistemkontrol ketika bekerja pada proyek bersama MIT/Sperry Corporation pada tahun 1941. Iamenyadari bahwa teknologi domain-frekuensi yang dikembangkan di Laboratorium Bell da-pat dipakai untuk menghadapi dampak gangguan dan menggunakan pendekatan ini untukmendisain suatu sistem kontol radar udara. Secara meyakinkan sukses ini menunjukkanteknik domain-frekuensi dalam disain sistem kontrol penting [Hall 1946].
Disain menggunakan pendekatan berdasar pada fungsi transfer, diagram blok danmetode domain-frekuensi adalah sukses besar dalam disain kontrol di Laboratorium Radi-asi. Pada tahun 1947, N.B. Nichols mengembangkan Diagram Nichols-nya untuk pendis-ainan sistem umpan balik. Dari hasil kerja MIT, teori servomekanik benar-benar diakui.Suatu ringkasan dari hasil kerja Laboratorium Radiasi MIT disajikan dalam Theory ofServomechanisms [James, Nichols, dan Philips 1947].
W.R. Evans [1948] bekerja di North American Aviation, menyajikan teknik root locus-nya yang memberikan cara langsung untuk menentukan lokasi pole loop-tutup didalambidang-s. Setelah itu, selama tahun 1950-an banyak hasil kerja dari masalah kontrol di-fokuskan pada bidang-s dan pada penentuan karakteristik respon-step loop-tutup yangdiharapkan dipandang dari segi "rise-time", "percent overshot" dll.
Analisa Stokhastik
Juga selama periode ini, teknik stokhastik diperkenalkan dalam kontrol dan teori ko-munikasi. Di MIT pada tahun 1942, N. Wiener [1949] menganalisa sistem pemrosesinformasi menggunakan model proses stokhastik. Bekerja dalam domain-frekuensi, iamengembangkan suatu filter optimal secara statistik untuk signal stasioner waktu-kontinu
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

168 Kontrol Optimal..
yang memperbaiki rasio "signal-ke-gangguan" dalam suatu sistem komunikasi. A.N. Kol-mogorov [1941] orang Rusia, memberikan suatu teori untuk proses stokhastik stasionerwaktu-diskrit.
Periode Klasik teori kontrol
Sekarang, teori kontrol otomatik menggunakan teknik domain-frekuensi telah menca-pai umurnya, ini sendiri diakui sebagai paradigma (menurut istilah Kuhn [1962]). Padasaat yang sama ketegaran teori matematika untuk servomekanik sudah diakui, dilain pihakrekayasa teknik disain telah tersedia. Periode setelah perang dunia dinamakan "periode-klasik" teori kontrol. Periode ini ditandai oleh munculnya buku-buku teks pertama [Mac-Coll 1945; Lauer, Lesnick dan Matdon 1947; Brown dan Campbell 1948; Chestnute danMayer 1951; Truxal 1955] dan diikuti oleh alat-alat disain yang memberikan intuisi besardan penyelesain terjamin terhadap masalah disain. Alat-alat ini dipakai dengan menggu-nakan perhitungan tangan atau paling banyak menggunakan mistar hitung bersama-samadengan teknik grapik.
Era antariksa/komputer dan kontrol modernDengan datangnya era antariksa, disain kontrol di Amerika berubah dari teknik domain-frekuensi teori kontrol klasik kembali lagi ke masa 1800-an yaitu teknik persamaan differen-sial yang ditulis sebagai domain-waktu. Alasan perkembangan ini adalah sebagai berikut.
Disain domain-waktu sistem tak-linier
Paradigma teori kontrol klasik sangat cocok untuk masalah disain kontrol selama dansesudah perang dunia. Pendekatan domain-frekuensi cocok untuk sistem linier invarian-waktu. Pendekatan ini adalah yang terbaik bila dikenakan pada sistem masukan-tunggal/ke-luaran-tunggal, teknik grapik adalah tidak memadai untuk sistem dengan banyak masukan- banyak keluaran.
Disain kontrol sistem klasik sudah mempunyai beberapa hasil sukses dengan sistemtak-linier. Menggunakan sifat-sifat penolakan-gangguan teknik domain-frekuensi, suatusistem kontrol dapat didisain tegar terhadap variasi dalam parameter sistem dan terhadapkesalahan pengukuran serta terhadap gangguan luar. Jadi, teknik klasik dapat digunakanpada versi terlinierkan dari suatu sistem tak-linier yang memberikan hasil-hasil baik padatitik keseimbangan dimana perilaku sistem didekati secara linier.
Teknik domain frekuensi juga dapat dipakai pada sistem tak-linier tipe sederhana meng-gunakan pendekatan uraian fungsi yang mengandalkan pada kriteria Nyquist. Teknik inidigunakan pertama kali oleh J. Groszkowski dalam disain transmitter radio sebelum perangdunia kedua dan diformalkan pada 1964 oleh J. Kudrewicz.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Sejarah ringkas kontrol otomatik.. 169
Sayang, hal ini tidak mungkin untuk mendisain sistem kontrol tak-linier banyak-fariabelyang sering muncul dalam aplikasi aerospace dengan menggunakan asumsi linier dan mem-perlakukan pasangan transmisi masukan-tunggal/keluran-tunggal pada suatu waktu ter-tentu.
Di Uni Soviet, ada banyak aktifitas dalam disain kontrol tak-linier. Di awali oleh Lya-punov, perhatian difokuskan pada teknik domain-waktu. Pada tahun 1948, Ivachenkomenyelidiki prinsip dari kontrol relay dimana signal kontrol di ubah-ubah secara kontinudiantara nilai-nilai diskrit. Tsypkin menggunakan bidang phase untuk mendisain kontroltak-linier pada tahun 1955. V.M. Popov [1961] menyajikan kriteria lingkaran untuk men-ganalisa kestabilan tak-linier.
Sputnik - 1957
Catatan sejarah menunjukkan di Uni Soviet peluncuran setelit pertama kali Sputnikpada tahun 1957. Konferensi pertama terbentuknya International Federation of AutomaticControl (IFAC) diselenggerakan di Moscow pada tahun 1960.
Peluncuran Sputnik melahirkan aktifitas yang hebat di Uni Soviet dalam disain kontrolotomatik. Tentang kegagalan dari setiap paradigma, kembali ke sejarah dan prisip-prisipalam dibutuhkan. Jadi, hal ini jelas bahwa kembali ke periode "primitif" teori kontrol yaituteknik domain-waktu yang berdasarkan pada persamaan differensial dibutuhkan. Hal inidisadari bahwa hasil kerja Langrange dan Hamilton yang menulis secara terang persamaantak-linier gerakan untuk berbagai sistem dinamik. Oleh karena itu teori kontrol yangberkaitan dengan persamaan differensial tak-linier sebagaimana yang telag disebutkan tadidibutuhkan.
Perlu dicatat bahwa tepatnya pada tahun 1960 perkembangan utama terjadi secaraindependen dalam berbagai teori komunikasi dan kontrol.
Navigasi
Pada tahun 1960, C.S. Draper menciptakan sistem navigasi inersial-nya yang menggu-nakan gyroscopes untuk menyajikan keakuratan informasi posisi dari benda yang bergerakdi ruang angkasa, misalnya pesawat atau pesawat antariksa. Jadi, sensor-sensor yang co-cok untuk navigasi dan disain kontrol dikembangkan.
Keoptimalan dalam sistem alam
Johann Bernoulli orang pertama yang menyebutkan prinsip keoptimalan yang berkai-tan dengan masalah "Brachistochrone" pada tahun 1696. Masalah ini diselesaiakan oleh
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

170 Kontrol Optimal..
Bernoulli bersaudara dan oleh I. Newton. Hal ini menjadi jelas bahwa pertanyaan untukkeoptimalan adalah suatu sifat mendasar dari gerakan dalam sistem alam. Berbagai prin-sip keoptimalan diselidiki, meliputi prinsip waktu-minimum dalam optik dari P. de Fermat(1600-an), hasil kerja dari Euler pada tahun 1744 dan hasil kerja Hamilton yang berkaitandengan suatu sistem bergerak dengan energi yang dibutuhkan minimum. Hal ini berkaitandengan meminimumkan integral dari fungsi waktu yang berkaitan dengan beda diantaraenergi kinetik dan energi potensial.
Prinsip-prinsip ini semuanya prinsip minimum. Cukup menarik, diawal tahun 1900-anEinstain menunjukkan dalam sistem kordinat ruang-waktu 4-D gerakan dari sistem yangterjadi dengan cara untuk memaksimumkan waktu.
Kontrol optimal dan teori estimasi
Sejak kejadian sistem secara alamiah menunjukkan keoptimalan gerakannya, hal inibermakna untuk mendisain sistem buatan-manusia dalam suatu cara optimal. Keuntun-gan utamanya adalah disain ini dapat diselesaikan dalam domain-waktu. Dalam konteksdisain kontrol modern biasanya meminimumkan waktu dalam perjalanan atau memini-mumkan fungsi energi tergeneral kuadrat atau indeks perilaku yang mungkin dilakukandengan beberapa pembatasan dari kontrol yang dikehendaki.
R. Belman [1957] memakai programing dinamik untuk kontrol optimal sistem waktu-diskrit, hasil menunjukkan bahwa arah alamiah untuk menyelesaikan masalah kontrol opti-mal adalah mundur dalam waktu. Prosedur yang dihasilkannya dalam loop-tutup, umum-nya tak-linier, berpola umpan balik.
Tahun 1958, L.S. Pontryagin mengembankan prinsip maksimumnya untuk menyele-saikan masalah kontrol optimal dengan mengandalkan pada Kalkulus variasi yang dikem-bangkan oleh L. Euler (1707-1783). Ia menyelesaikan masalah waktu minimum melaluihukum kontrol relay "on/off" sebagai kontrol optimal [Pontryagin, Bolyansky, Gamkre-lidze dan Mishchenko 1962]. Di Amerika selama tahun 1950-an kalkulus variasi digunakanuntuk masalah kontrol optimal umum pada Universitas Chicago dan lainnya.
Tahun 1960, tiga paper utama dibuat oleh R. Kalman dan rekan sekerjanya yangbekerja di Amerika. Dua diantaranya [Kalman dan Bertram 1960] mempublikasi hasilkerja utama Lyapunov dalam kontrol domain-waktu sistem tak-linier. Berikutnya [Kalman1960a] mendiskusikan kontrol optimal sistem yang menyajikan persamaan disain dari Lin-ear Quadratic Regulator (LQR). Paper yang ketiga [Kalman 1960b] filter optimal dan teoriestimasi yang menyajikan persamaan disain untuk filter Kalman diskrit. Sedangkan filterKalman kontinu dikembangkan oleh Kalman dan Bucy [1961].
Dalam periode setahun pembatasan utama dari teori kontrol klasik dapat diatasi, alatpenting teori baru diperkenalkan dan suatu era baru dalam teori kontrol dimulai, dina-makan era ini era kontrol modern.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Sejarah ringkas kontrol otomatik.. 171
Kunci utama hasil kerja Kalman sebagai berikut. Merupakan pendekatan domain-waktu, menjadi dapat lebih digunakan untuk sistem linier variasi-waktu juga untuk sistemtak linier. Ia memperkenalkan aljabar dan matriks, sehingga dapat pula dilakukan denganmudah pada sistem dengan banyak masukan - banyak keluaran. Ia menggunakan konsepkeadaan dalam sistem, jadi pendekatan ini berkaitan erat dengan "kedinamikan dalam"dari suatu sistem dan bukan hanya perilaku masukan/keluaran sistem.
Dalam teori kontrol, Kalman memformakan penertian dari keoptimalan dari teori kon-trol melalui peminimuman suatu fungsi energi tergeneral yang sangat umum. Dalamteori estimasi, ia memperkenalkan pengertian stokhastik yang digunakan pada sistemvarian-waktu takstasioner. Jadi pendekatan least-square yang pertama kali digunakan olehC.F. Gauss (1777-1855) dalam mengestimasi orbit planet tersaji di filter Kalman dalambentuk suatu penyelesaian recursive. Filter Kalman adalah perluasan alamiah dari filterWiener untuk sistem stokhastik takstasioner.
Teknik klasik domain-frekuensi menyajikan perangkat-perangkat formal dalam disain,namum pendisainan itu sendiri tetap banyak sebagai seni dan menghasilkan sistem umpanbalik takunik. Sebaliknya, teori Kalman menyajikan penyelesaian optimal yang meng-hasilkan sistem kontrol dengan perilaku terjamin. Kontrol ini dapat langsung diperolehmelalui penyelesaian persamaan disain matriks formal yang secara umum mempunyaipenyelesaian tunggal.
Hal ini bukanlah suatu kebetulan dari titik ini program antariksa Amerika menjadimekar bagaikan bunga dengan menggunakan filter Kalman yang menyajikan data navigasiuntuk pendaratan pertama kali di bulan.
Teori kontrol taklinier
Selama tahun 1960-an di Amerika, G. Zames [1966], I.W. Sandberg [1964], K.S. Naren-dra [Narendra dan Goldwyn 1964], C.A. Desoer [1965] dan yang lainnya memperluas haasilkerja Popov dan Lyapunov dalam kestabilan tak-linier. Terdapat suatu pemakaian yangluas dari haasil-haasil ini dalam pengkajian distorsi tak-linier loop-umpan balik pitapem-batas, kontrol pemrosesan tak-linier, pendisainan kontrol pesawat dan robotik.
Komputer dalam disain kontrol dan implementasi
Teknik disain klasik dikerjakan oleh tangan dengan menguunakan pendekatan grapik. Di-lain pihak disain kontrol modern membuthkan penyelesain dari persamaan matriks tak-linier yang kompleks. Hal ini beruntung bahwa pada tahun 1960 ada perkembangan utamadidalam area lain, yaitu teknologi komputer digitel. Tanpa komputer, kontrol modern akanmempunyai aplikasi yang terbatas.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

172 Kontrol Optimal..
Perkembangan Komputer Digitel
Sekitar tahun 1830 C. Babbage memperkenalkan prinsip-prinsip komputer modernyang meliputi memori, kontrol program dan kemampuan berkembang. Pada tahun 1948,J. von Neumann menunjukan pengkontruksian progam-penyimpanan komputer IAS diPrinceton. IBM membangun mesin progran-penyimpan SSEC. Pada tahun 1950, SperryRand membangun mesin pemroses data komersial pertamanya, yaitu UNIVAC I. Tidaklama setelah IBM menjual 701 komputer.
Pada tahun 1969 terjadi kemajuan utama, yaitu generasi kedua komputer diperkenalkanyang mana menggunakan teknologi solid-state. Tahun 1965, perusahaan di bidang dijitelmembuat PGP-8 dan industri komputermini dimulai. Akhirnya, pada tahun 1969 W. Hoffmenciptakan microprocessor.
Kontrol digitel dan teori filter
Dalam kontrol modern komputer digitel diperlukan untuk dua tujuan. Pertama, dibu-tuhkan untuk menyelesaikan persamaan matriks disain yang menghasilkan hukum kontrol.Hal ini dikerjakan selama proses pendisainan. Kedua, karena hukum-hukum kontrol opti-mal dan filter adalah varian-waktu, maka komputer dibutuhkan untuk mengimplementasimaksud kontrol modern dan filter pada sistem aktual.
Dengan kedatangan microprocessor pada tahun 1969 suatu era baru berkembang. Sis-tem kontrol yang diimplementasi pada komputer digitel harus diformulasi dalam waktudiskrit. Maka dari itu, pertumbuhan teori kontrol digitel saat ini adalah alamiah.
Selama tahun 1950-an, teori dari sistem data sample dikembangkan oleh J.R. Ragazzini,G. Franklin dan L.A. Zadeh [Raggazini dan Zadeh 1952, Raggazini dan Franklin 1958] diUniversitas Colombia, juga dikembangkan oleh E.I. Jury [1960], B.C. Kuo [1963] dan yanglainnya. Ide menggunakan komputer digitel untuk kontrol proes industri muncul selamaperiode ini [Åström dan Wittenmark 1984]. Kerja serius dimulai tahun 1956 dengan proyekkerjasama diantara TRW dan Texaco menghasilkan sistem kontrol komputer yang dinstalltahun 1959 pada pengilangan minyak Port Arthur Texas.
Pengembangan reaktor Nuklir selama tahun 1950-an adalah motivasi utama untukeksplorasi kontrol proses industri dan instrumentasi. Hasil kerja ini adalah dasar dalamkontrol proses kimia pada tahun 1940-an.
Pada tahun 1970, dengan hasil kerja dari K. Åström [1970] dan yang lainnya pentingnyakontrol digitel dalam industri proses benar-benar diakui.
Hasil kerja C.E. Shannon tahun 1950-an di Laboratorium Bell menampakkan penting-nya teknik data sample dalam pemrosesan signal. Pemakaian dari teori filter digitel dikajidi Analitic Sciences Corporation [Gelb 1974] dan ditempat lainnya.
Komputer Personal
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Sejarah ringkas kontrol otomatik.. 173
Dengan diperkenalkannya komputer personal tahun 1983, pendisainan sistem kontrolmodern menjadi memungkin bagi para insinyur untuk bekerja secara individual pada su-atu stasiun kerja individu (individual work station). Maka dari itu, berbagai paket dis-ain sofware sistem kontrol dikembangkan, yaitu ORACLS, Program CC, Control-C, PC-Matlab, MATRIXx, Easy5, SIMNON dll.
Perpaduan kontrol modern dan kontrol klasik
Dengan publikasi bukuteks pertama tahun 1960-an, teori kontrol modern diakui sebagaisuatu paradigma bagi disain kontrol otomatik di Amerika. Aktifitas yang sungguh-sungguhdan implementasi yang terjadi, penggabungan IRE dan AIEE, usaha yang terus menerusoleh P. Haggerty di Texas Intruments untuk membentuk Institute of Electrical and Elec-tronics Engineer (IEEE) di awal tahun 1960-an.
Dengan semua daya dan keuntungannya, kontrol modern masih kurang dalam beberapaaspek. Jaminan perilaku yang diperoleh melalui penyelesaian persamaan disain matriksmempunyai arti bahwa mungkin sering mendisain suatu sistem kontrol bekerja dalam teoritanpa mengikutsertakan intuisi insinyur berkaitan dengan masalah yang ada. Pada sisilain, teknik domain-frekuensi dari teori kontrol klasik memberikan banyak intuisi.
Masalah lain adalah suatu sistem kontrol modern dengan sebarang kompensator di-namik bisa tidak tegar terhadap gangguan, kedinamikannya tak-termodelkan dan gagaldalam pengukuran noise. Disisi lain, ketegaran adalah melekat dengan pendekatan domain-frekuensi menggunakan pengertian "gain" dan "phase margin".
Maka dari itu, pada tahun 1970-an secara khusus di Inggris ada aktifitas besar dilakukanoleh H.H. Rosenbrock [1974], A.G.J. MacFarlene dan Postlethwaite [1977] dan yang lainnyauntuk memperluas teknik domain-frekuensi klasik dan root locus pada sistem multifariabel.Keberhasilan diperoleh menggunakan pengertian karakteristik "locus", diagonal dominandan invers susunan Nyquist.
Penyokong utama dari teknik klasik untuk sistem multifariabel adalah I. Horowitz yangmengembangkan teori umpan balik kuantitatif di awal tahun 1970-an untuk penyempurnaandisain ketegaran menggunakan diagram Nichol.
Pada tahun 1981, beberapa paper yang mempunyai kemungkinan berkembang dimasamendatang dimunculkan oleh J. Doyle dan G. Stain [1981] serta M.G. Safanov, A.J. Laubdan G.L. Hartmann [1981]. Memperluas hasil kerja dari MacFarlane dan Postlethwaite[1977], mereka menunjukkan pentingnya plot nilai singular versus frekuensi dalam disainketegaran multifariabel. Menggunakan plot ini berbagai teknik domain-frekuensi klasikbisa digabungkan kedalam disain modern. Hasil kerja ini diteruskan oleh M. Athans danyang lainnya dalam kontrol proses dan pesawat terbang. Hasilnya adalah suatu teori kontrolbaru yang merupakan paduan paling utama dari teknik klasik dan modern. Suatu kajiandari teori kontrol modern yang berkaitan dengan ketagaran dilakukan oleh P.Dorato [1987].
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

174 Kontrol Optimal..
7.2 Beberapa masalah kontrol optimal
Pada bagian ini akan diberikan beberapa contoh masalah kontrol optimal yang dimak-sudkan untuk memberikan suatu gambaran penjelasan mengenai masalah kontrol optimal.Permasalahan kontrol optimal umumnya mencari suatu pengontrol, dalam hal ini dino-tasikan dengan u(t) yang memenuhi suatu plan linier dengan meminumkan suatu indeksperilaku. Suatu hal yang lebih menarik adalah bila pada plan yang dikaji diberikan suatugangguan luar. Mengetahui pengaruh gangguan luar tsb. terhadap sistem yang dikajiterutama dalam pencapaian suatu keadaan ’stedi’ adalah sangat penting untuk itu dicarisuatu pengontrol yang berbeda dengan sistem tampa gangguan luar guna menghilangkanperanan gangguan luar terhadap sistem yang dikaji sekaligus meminimumkan indeks peri-laku yang diberikan. Dalam pembahasan dipertimbangkan kasus untuk gangguan konstan.Sebelum dibahas lebih dalam kajian ini, akan diperkenalkan terlebih dahulu beberapamasalah dari kontrol optimal dan contohnya.
1 Pertumbuhan tanamanMisalkan seorang petanam mempunyai sejumlah tanamam yang mana ia ingin tana-mannya tumbuh dengan ketinggian tertentu pada saat waktu yang telah ditentukan.Rata-rata pertumbuhan alamia dari tanaman dapat dipercepat dengan cahaya bu-atan (bukan matahari) untuk mengurangi lamanya waktu saat gelap ketika tidakterjadi pertumbuhan. Proses modelnya diberikan oleh persamaan berikut
dx(t)
dt= 1 + u(t), (7.1)
dimana x(t) adalah tinggi tanaman pada saat t dan u(t) adalah pengontrol tinggitanaman pada saat t. Misalkan keadaan awal dan keadaan akhir tinggi tanamanmasing-masing diberikan oleh persamaan
x(0) = 0 dan x(1) = 2. (7.2)
Pertumbuhan tanaman dilakukan dengan biaya berbentuk
J =
1∫
0
1
2u2(t)dt. (7.3)
Pada kasus ini, dicari pengontrol u(t) pada persamaan (7.1) yang memenuhi keadaan(7.2) serta meminimumkan nilai J pada persamaan (7.3). Permasalahan ini dengansederhana dapat diselesaikan dengan cara menentukan penyelesaian persamaan (7.1)yang memenuhi keadaan (7.2), yaitu
x(t) =
t∫
0
(1 + u(τ))dτ. (7.4)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Beberapa masalah kontrol optimal.. 175
Dimana untuk x(1) = 2 diperoleh
2 =
1∫
0
(1 + u(τ))dτ = 1 +
1∫
0
u(τ)dτ.
Dari persamaan terakhir diatas diperoleh persamaan
t∫
0
u(τ)dτ = 1. (7.5)
Sedangkan dengan memodifikasi persamaan (7.3) diperoleh
J =
1∫
0
1
2u2(t)dt
=1
2
1∫
0
[(u(t)− 1)2 + 2u(t)− 1]dt
=1
2
1∫
0
[(u(t)− 1)2]dt+ 1− 1
2
=1
2
1∫
0
[(u(t)− 1)2]dt+1
2. (7.6)
Karena nilai1∫
0
[(u(t)−1)2]dt ≥ 0 untuk sebarang nilai u(t) dan dengan kenyataan dari
persamaan (7.6), maka diperoleh nilai minimum J adalah1
2untuk u(t) = 1, 0 ≤
t ≤ 1.
2 Masalah waktu minimumMisalkan suatu model diberikan oleh persamaan
x(t) = f(x(t), u(t), t), t ∈ [t0, t1]. (7.7)
Pada saat waktu awal t0 keadaan awal adalah x(t0) = x0. Diinginkan keadaan akhirx(t1) yang memenuhi persamaan (7.7) terletak pada suatu daerah tertentu S. Dalamhal ini bertujuan mentransfer keadaan awal x0 ke keadaan akhir x(t1) dengan waktuyang minimum. Jadi indeks perilakunya adalah meminimumkan
J = t1 − t0 atau J =
t1∫
t0
dt. (7.8)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

176 Kontrol Optimal..
3 Masalah energi minimumMasalah energi minimum adalah masalah mentransfer keadaan awal x(t0) kesuatutarget tertentu S pada waktu tertentu t1 dengan meminimumkan biaya energi yangdigunakan, yaitu meminimumkan
J =
t1∫
t0
u2(t)dt. (7.9)
Dalam hal ini dicari pengontrol optimal u(t) yang memenuhi persamaan (7.7) sekali-gus dengan u(t) ini J pada persamaan (7.9) mempunyai nilai minimum.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Bab 8Formulasi masalah kontrol optimal
Pada bagian terdahulu telah diberikan contoh-contoh masalah kontrol optimal. Pada con-toh masalah Pertumbuhan tanamam diselesaikan masalah tsb. hanya dengan "kalku-lus sederhana". Namum demikian untuk permasalahan lain yang lebih umum tentunyaakan sulit menyelesaikan permasalahan hanya dengan menggunakan "kalkulus sederhana".Oleh karena itu pada bagian ini akan diformulasikan secara umum masalah kontrol opti-mal dalam bentuk ungkapan matematik, yaitu dalam bentuk beberapa persamaan denganharapan memberikan kejelasan serta bagaimana menyelesaikannya.
Formulasi masalah kontrol optimal diberikan sebagai berikut. Misalkan suatu laju pe-rubahan dari fariabel keadaan x(t) terhadap berubahnya waktu t diberikan oleh persamaan
x(t) = f(x(t), u(t), t), (8.1)
dengan keadaam awal x(t0) = x0 dan keadaan akhir x(t1) = x1 dan u(t) menyatakanpengontrol keadaan pada waktu t. Dalam hal ini masalah kontrol optimal adalah mencaripengontrol optimal u∗ yang memenuhi persamaan (8.1) dengan syarat nilai J yang berikutini
J(x) =
t1∫
t0
g(x, x, t)dt (8.2)
adalah minimum.Misalkan x∗ adalah titik ekstrim dimana Jmin = J(x∗), maka x∗ akan memenuhi
∂
∂x∗[g(x∗, x∗, t)]− d
dt
[
∂
∂x∗[g(x∗, x∗, t)]
]
= 0 (8.3)
Persamaan (8.3) dinamakan persamaan Euler-Lagrange. Pada kesempatan ini persamaanEuler-Langrange ini tidak dibuktikan, tetapi akan dibuktikan pada bagian berikutnya den-gan menggunakan kalkulus variasi.
177

178 Formulasi masalah kontrol optimal..
Contoh 50 Diberikan: x(t) = −x(t)+u(t), x(0) = 0, dan x(2) = 1. Dapatkan u∗(t) yangmemenuhi x(t) = −x(t) + u∗(t) dengan
J =
2∫
0
(
x2(t) + u2(t))
dt
minimum.JawabDisisni persamaan perubahan keadaan diberikan oleh x(t) = −x(t) + u(t). Diperolehpengontrol u(t) = x(t) + x(t), sehingga didapat
J =
2∫
0
(
x2(t) + u2(t))
dt
=
2∫
0
(
x2(t) + [x(t) + x(t)]2)
dt
=
2∫
0
(
2x2(t) + 2x(t)x(t) + x2(t))
dt.
Jadig (x(t), x(t)) = 2x2(t) + 2x(t)x(t) + x2(t)
dan masing-masing ∂g
∂xdan ∂g
∂xdiberikan oleh
∂g
∂x= 4x(t) + 2x(t) dan
∂g
∂x= 2x(t) + 2x(t),
dengan menggunakan persamaan Euler-Langrange
∂g
∂x− d
dt
[
∂g
∂x
]
= 0
diperoleh
4x(t) + 2x(t)− d
dt[2x(t) + 2x(t)] = 0
atau4x(t) + 2x(t)− 2x(t)− 2x(t) = 0.
Bila disederhanakan persamaan terakhir yang diperoleh, maka didapat persamaan differ-ensial berikut
x(t)− 2x(t) = 0
yang mempunyai penyelesaian
x(t) = c1e√2t + c2e
−√2t.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

179
Untuk keadaan awal x(0) = 0 dan keadaan akhir x(2) = 1, diperoleh persamaan
c1 + c2 = 0
c1e2√2 + c2e
−2√2 = 1.
Dari kedua persamaan diatas diperoleh
c1 =1
e2√2 − e−2
√2
dan c2 =1
e−2√2 − e2
√2.
Jadix∗(t) =
1
e2√2 − e−2
√2e√2t +
1
e−2√2 − e2
√2e−
√2t
dan kontrol optimal u∗(t) diberikan oleh persamaan berikut
u∗(t) = x∗(t) + x∗(t)
=1 +
√2
e2√2 − e−2
√2e√2t +
1−√2
e−2√2 − e2
√2e−
√2t.
�
Contoh 51 Kembali pada masalah pertumbuhan tanaman yang telah dibahas pada bagiansebelumnya yang mempunyai bentuk
x(t) = 1 + u(t)
dari persamaan ini, didapat u(t) = x(t)− 1 dan
J =1
2
1∫
0
u2(t)dt
=1
2
1∫
0
(x(t)− 1)2dt.
Jadi
g(x(t), x(t), t) =1
2(x(t)− 1)2
=1
2(x2(t)− 2x(t) + 1)
Dengan menggunakan persamaan Euler-Langrange
∂
∂x[g(x, x, t)]− d
dt
[
∂
∂x[g(x, x, t)]
]
= 0
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

180 Formulasi masalah kontrol optimal..
diperoleh persamaan differensial:x(t) = 0
yang mempunyai penyelesaian x(t) = c1t+c0. Dengan keadaan awal x(0) = 0 dan keadaanakhir x(1) = 2 didapat x(t) = 2t. Jadi kontrol optimal u(t) diberikan oleh
u(t) = x(t)− 1 = 2− 1 = 1.
Hasil yang diperoleh sesuai dengan hasil pada bagian sebelumnya.
�
8.1 Masalah maksimum/minimum dari suatu integral
Pada bagian ini akan diuraikan munculnya persamaan Euler-Langrange yang telah diperke-nalkan pada bagian sebelumnya.
Dinyatakan lagi suatu pernyataan yang lebih umum dari pernyataan yang telah dibuatsebelumnya, yaitu diinginkan mendapatkan suatu kurva x = x(t) dimana x(t1) = x1 danx(t2) = x2 sedemikian hingga bentuk integral berikut
t1∫
t2
g(x, x, t)dt (8.4)
mempunyai nilai maksimum/minimum.
8.1.1 Persamaan Euler-Langrange
Pada subbagian ini diturunkan persamaan yang telah disebutkan pada awal Bab terdahuluyaitu persamaan Euler-Langrange. Persamaan ini adalah salah satu persamaan yang pent-ing untuk menyelesaikan masalah kontrol optimal. Sebagai motifasi munculnya persamaanini erat kaitannya dengan masalah enerji akan diberikan pada subbagian berikutnya. Untuk
x
t
(t1, x1)
(t2, x2)
Gambar 8.1: Kurva sekitar.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Masalah maksimum/minimum dari suatu integral.. 181
mendapatkan kurva x = x(t), ditinjau pengaruh dari integral (8.4) disekitar kurva tsb. (li-hat Gambar 8.1)
X = x(t) + εη(t), (8.5)
dengan η(t) adalah sebarang fungsi dan ε sebarang parameter. Agar supaya kurva (8.5)melalui titik (t1, x1) dan (t2, x2) haruslah
η(t1) = η(t2) = 0. (8.6)
Selajutnya dibutikan kurva x∗ = x(t) memenuhi persamaan
∂
∂x∗[g(x∗, x∗, t)]− d
dt
[
∂
∂x∗(g(x∗, x∗, t))
]
= 0 . (8.7)
Kondisi (8.7) adalah syarat perlu untuk x∗ = x(t) bahwa (8.4) mempunyai nilai maksimumatau minimum. Misalkan x∗ = x(t) adalah kurva melalui titik (t1, x1) dan (t2, x2) yangmembuat integral (8.4) mencapai nilai maksimum/minimum dan kurva X = x(t) + εη(t),η(t1) = η(t2) = 0 adalah kurva sekitar x(t) yang juga melalui (t1, x1) dan (t2, x2). Pertamaditunjukkan
t2∫
t1
[
∂g(x∗, x∗, t)
∂x∗− d
dt
(
∂g(x∗, x∗, t)
∂x∗
)]
η(t)dt = 0
Tulis:
I(ε) =
t2∫
t1
g(x(t) + εη(t), x(t) + εη(t), t)dt. (8.8)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

182 Formulasi masalah kontrol optimal..
Nilai I(ε) pada persamaaan (8.8) mencapai maksimum/minimum untuk kurva x = x(t)
biladI(ε)
dε= 0 di ε = 0. Dengan menggunakan aturan Leibnitz untuk integral diperoleh
dI(ε)
dε
∣
∣
∣
∣
ǫ=0
=
t2∫
t1
∂g
∂εdt+ g
dt2dε
− gdt1dε
∣
∣
∣
∣
ǫ=0
= 0
=
t2∫
t1
[
∂g
∂xη(t) +
∂g
∂xη(t)
]
dt = 0
=
t2∫
t1
∂g
∂xη(t)dt+
t2∫
t1
∂g
∂xη(t)dt = 0
=
t2∫
t1
∂g
∂xη(t)dt+
∂g
∂xη(t)
∣
∣
∣
∣
t2
t1
−t2∫
t1
η(t)d
dt
∂g
∂xdt = 0
=
t2∫
t1
∂g
∂xη(t)dt−
t2∫
t1
η(t)d
dt
∂g
∂xdt = 0
=
t2∫
t1
[
∂g
∂x− d
dt
∂g
∂x
]
η(t)dt = 0
karena η(t) sebarang dan nilai integral tsb. bernilai nol, maka haruslah
∂g
∂x− d
dt
∂g
∂x= 0.
8.2 Cara Hamiltonian
Pada bagian ini akan diberikan suatu penyelesaian kontrol optimal dengan menggunakancara yang dinamakan Hamiltonian. Namum sebelum diuraikan cara tsb. terlebih dahuludiberikan suatu motifasi untuk memberikan gambaran mendatang yang lebih jelas tentangcara Hamiltonian tsb. Motifasi diberikan lewat suatu kajian yang berkenaan dengan enerjikenitik dan enerji potensial dari suatu massa yang bergerak karena suatu gaya.
Misalkan suatu massa m yang digantung dengan pegas secara vertikal (lihat Gam-bar 8.2).
Massa pegas diabaikan sedangkan kostanta pegas adalah k. Bila x(t) adalah posisimassa pada keadaan setimbang saat t, maka dengan menggunakan hukum Hooke, gayadiberikan oleh
F = −kx(t)i, (8.9)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Cara Hamiltonian.. 183
i
x
m
Gambar 8.2: Sistem pegas.
dengan i adalah vektor satuan dengan arah kebawah. Karena
F = −∂V∂x
i, (8.10)
dengan V menyatakan enerji potensial. Selanjutnya dari (8.9) dan (8.10) diperoleh
∂V
∂x= kx(t) atau V =
1
2kx2(t)
dalam hal ini konstanta sebarang diambil sama dengan nol. Energi kinetik dari massaadalah
T =1
2m
[
dx
dt
]2
=1
2mx2(t).
Bila L = T − V = 12mx2(t)− 1
2kx2(t) dan integral
t2∫
t1
Ldt
mempunyai nilai minimum, haruslah dipenuhi
∂L
∂x− d
dt
(
∂L
∂x
)
= 0 (8.11)
ataumx(t) + kx(t) = 0.
Hasil ini tentunya sesuai bila digunakan Hukum-hukum Newton. Selain dari pada itupersamaan (8.11) adalah persamaan Euler-Lagrange disini peranan fungsi g diganti olehselisih diantara enerji potensial dan enerji kinetik, yaitu L.
Berikut ini diuraikan cara Hamiltonian untuk menyelesaikan masalah kontrol optimalsebagai berikut, cari kontrol optimal u∗(t) yang memenuhi bentuk
x(t) = f(x(t), u(t), t), x(t) ∈ Rn, u(t) ∈ R
p (8.12)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

184 Formulasi masalah kontrol optimal..
sepanjang lintasan x∗(t) sehingga nilai integral
J = h(x(t1), t1) +
t1∫
t0
g(x(t), u(t), t)dt (8.13)
minimum. Tulis h dalam bentuk integral berikut
h(x(t1), t1) =
t1∫
t0
d
dt[h(x(t), t)] dt+ h(x(t0), t0).
Sehingga diperoleh
J(u) =
t1∫
t0
(
g(x(t), u(t), t) +d
dt[h(x(t), t)]
)
dt+ h(x(t0), t0).
Karena h(x(t0), t0) tetap (tidak mengandung u(t)), maka permasalahan akan ekivalen den-gan meminimumkan integral
J(u) =
t1∫
t0
(
g(x(t), u(t), t) +d
dt[h(x(t), t)]
)
dt. (8.14)
Dengan menggunakan aturan rantai differensial diperoleh
d
dt[h(x(t), t)] =
[
∂h(x, t)
∂x
]′x+
∂h(x, t)
∂t,
dimana tanda ′ menyatakan suatu transpose. Dalam hal ini didapat
J(u) =
t1∫
t0
(
g(x(t), u(t), t) +
[
∂h(x, t)
∂x
]′x+
∂h(x, t)
∂t
)
dt (8.15)
Untuk mengakomodasi persamaan (8.12) dibentuk fungsional
ga(x, x, u, λ, t) = g(x(t), u(t), t) + λ′[f(x, u, t)− x] +
[
∂h(x, t)
∂x
]′x+
∂h(x, t)
∂t(8.16)
dimana λ = (λ1, λ2, . . . , λn) adalah suatu pengali Langrange. Sekarang masalahnya men-jadi meminimumkan
Ja(u) =
t1∫
t0
ga(x, x, u, λ, t)dt.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Cara Hamiltonian.. 185
Persamaan diatas akan memberikan dua persamaan Euler-Lagrange dalam x dan u. Per-tama ditinjau dulu persamaan Euler-Langrange dalam x∗ yaitu
∂ga(x∗, x∗, u∗, λ∗, t)
∂x∗− d
dt
[
∂ga(x∗, x∗, u∗, λ∗, t)
∂x∗
]
= 0, (8.17)
bila disubstitusikan persamaan (8.16) kedalam persamaan (8.17) didapat:
∂∂x∗
[
g(x∗, u∗, t) +(
∂h(x∗,t)∂x∗
)′x∗ + ∂h(x∗,t)
∂t+ λ∗
′
f(x∗, u∗, t)
]
− ddt
[
∂h(x∗,t)∂x∗
− λ∗]
= 0
(8.18)
atau∂
∂x∗
[
g(x∗, u∗, t) + λ∗′
f(x∗, u∗, t)]
+(
∂2h(x∗,t)
∂x∗2
)′x∗
+∂2h(x∗,t)∂x∗∂t
− ddt
[
∂h(x∗,t)∂x∗
]
+ λ∗ = 0
. (8.19)
Dari aturan rantai untuk turunan didapat
d
dt
[
∂h(x∗, t)
∂x∗
]
=
[
∂2h(x∗, t)
∂x∗2
]′x∗ +
∂2h(x∗, t)
∂t∂x∗. (8.20)
Dari dua persamaan (8.19) dan (8.20) serta karena urutan pendeferensialan dapat diper-tukarkan diperoleh persamaan
λ∗ = − ∂
∂x∗[g(x∗, u∗, t) + λ∗′f(x∗, u∗, t)] . (8.21)
Selanjutnya ditinjau persamaan Euler-Langrange dalam u∗ yaitu
∂ga(x∗, x∗, u∗, λ∗, t)
∂u∗− d
dt
[
∂ga(x∗, x∗, u∗, λ∗, t)
∂u∗
]
= 0.
Dengan kenyataan∂ga(x
∗, x∗, u∗, λ∗, t)
∂u∗= 0, maka diperoleh persamaan
∂ga(x∗, x∗, u∗, λ∗, t)
∂u∗= 0
atau∂
∂u∗[g(x∗, u∗, t) + λ∗′f(x∗, u∗, t)] = 0. (8.22)
Persamaan (8.12), (8.21) dan (8.22) memberikan kondisi perlu untuk menentukan kontroloptimal u∗(t) supaya nilai J pada persamaan (8.13) minimum. Kondisi perlu ini ter-diri dari (2n + p) persamaan yang mana sebanyak 2n persamaan differensial tingkat satumerupakan n persamaan dari persamaan (8.12) dan n persamaan dari persamaan (8.22)dan p persamaan dari persamaan (8.21). Penyelesaian dari 2n persamaan differensial tsb.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

186 Formulasi masalah kontrol optimal..
akan memuat sebanyak 2n konstatanta. Untuk menghitung konstanta-konstanta ini, adasebanyak n kondisi batas di t = t0 yang diberikan oleh persamaan
x(t0) = x0,
dan tambahan sebanyak n kondisi batas (sebanyak (n+1) kondisi batas bila waktu akhirt1 bebas) dari keadaan akhir pada t = t1.
Bila diperhatikan kuantitas dalam differensial parasial pada persamaan (8.21) dan(8.22) adalah sama. Digunakan hal ini untuk mendifinisikan suatu Hamiltonian sebagaiberikut:
H(x, u, λ, t)def= g(x, u, t) + λ′f(x, u, t), (8.23)
maka dari persamaan (8.21), (8.22) dan (8.23) dipereroleh
λ = − ∂
∂x[H(x, u, λ, t)] (8.24)
0 =∂
∂u[H(x, u, λ, t)] (8.25)
dan persamaan (8.12) menjadi
x =∂
∂λ[H(x, u, λ, t)]. (8.26)
Untuk menyelesaikan kontrol optimal menggunakan cara Hamiltonian, harus diselesaikanpersamaan (8.24) - (8.26) secara serempak. Cara yang mudah, pertama diselesaikan per-samaan (8.25) sehingga diperoleh kontrol optimal u∗
u∗ = u∗(x, λ, t) (8.27)
selanjutnya substitusikan ke persamaan (8.23) sehingga diperoleh
H∗(x, λ, t) = H(x, u∗(x, λ, t), λ, t). (8.28)
Persamaan differensial (8.24) dan (8.25) menjadi sekumpulan dari 2n persamaan differen-sial tingkat satu serentak:
x =∂
∂λH∗(x, λ, t) (8.29)
λ = − ∂
∂xH∗(x, λ, t). (8.30)
Trayektori x∗(t) dan λ∗(t) diperoleh dengan menyelesaikan persamaan ini dengan sebanyak2n kondisi batas, sedangkan kontrol optimal diperoleh dari persamaan (8.27).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Cara Hamiltonian.. 187
Contoh 52 Diberikan suatu sistem{
x1(t) = x2(t)x2(t) = u(t)
dengan keadaan awal x1(0) = x2(0) = 1 dan keadaan akhir x1(2) = x2(2) = 0. Dapatkanu∗ supaya
J(u) =1
2
2∫
0
u2(t)dt
minimum.Jawab. Dibentuk Hamiltonian
H(x, u, λ, t) =1
2u2 + λ1x2 + λ2u.
Didapat∂H
∂u= u+ λ2 = 0 ⇒ u∗(t) = −λ2
dan∂2H
∂u2= 1 > 0.
Jadi H(x, u, λ, t) mencapai nilai minimum. Selanjutnya diperoleh
H∗(x, λ, t) =1
2(λ2)
2 + λ1x2 + λ2(−λ2)
=1
2(λ2)
2 + λ1x2 − (λ2)2
= λ1x2 −1
2(λ2)
2,
x1 =∂H∗
∂λ1= x2
x2 =∂H∗
∂λ2= −λ2
(8.31)
dan
λ1 = −∂H∗
∂x1= 0 ⇒ λ1 = c1
λ2 = −∂H∗
∂x2= −λ1 ⇒ λ2 = −c1 ⇒ λ2 = −c1t + c2.
(8.32)
Dari dua persamaan (8.31) dan (8.32), penylesaian x1 dan x2 masing-masing diberikanoleh
x1(t) =c16t3 − c2
2t2 + c3t+ c4
x2(t) =c12t2 − c2t+ c3.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

188 Formulasi masalah kontrol optimal..
Dengan memasukkan nilai-nilai keadaan awal dan keadaan akhir pada x1(t) dan x2(t),diperoleh
x∗1(t) =1
2t3 − 7
4t2 + t+ 1
x∗2(t) =3
2t2 − 7
2t+ 1.
Dalam hal ini juga diperoleh
λ∗1 = 3
λ∗2 = −3t +7
2
danu∗(t) = 3t− 7
2.
�
Berikut ini diberikan beberapa ringkasan apa yang telah dibahas mengenai cara menye-lesaikan masalah kontrol optimal dengan menggunakan cara Hamiltonian sebagai berikut:Cari u∗(t) yang memenuhi persamaan x(t) = f(x, u, t) dengan meminimumkan indeksperilaku
J = h(x(t1), t1) +
t1∫
t0
g(x, u, t)dt.
Langka penyelesaian adalah
1 Bentuk Hamiltonian, yaitu H(x, u, λ, t) = g(x, u, t) + λ′f(x, u, t).
2 Selesaikan persamaan kontrol∂
∂uH(x, u, λ, t) = 0
untuk memperoleh u∗ = u∗(x, λ, t).
3 Dapatkan Hamiltonian H∗(x, λ, t) = H(x, u∗, λ, t).
4 Selesaikan 2n persamaan
x(t) = ∂∂λH∗(x, λ, t) (persamaan keadaan)
λ(t) = − ∂∂xH∗(x, λ, t) (persamaan ”ko− keadaan”)
dengan kondisi batas diberikan oleh keadaan awal dan keadaan akhir.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Cara Hamiltonian.. 189
5 Substisusikan hasil-hasil langka 4 kedalam u∗ untuk memperoleh kontrol optimal yangdicari.
Sebegitu jauh kajian terdahulu diasumsikan bahwa kontrol u tak dibatasi. Dari asumsiini kalkulus variasi dapat langsung digunakan untuk menyelesaikan masalah kontrol opti-mal. Turunan parsial dari H(x, u, λ, t) terhadap u yang diberikan dalam persamaan (8.25)adalah merupakan syarat perlu agar H(x, u, λ, t) mencapai minimum. Turunan parsial tsb.langsung bisa digunakan hanya untuk sebarang x, u, t dan bila u tak dibatasi.
Dalam kajian berikut ini kontrol u dibatasi sebagai berikut
u(t) ∈ U ⊂ Rp. (8.33)
Pembatasan pada persamaan (8.33) tentunya untuk memberikan perbedaan dengan ka-jian yang terdahulu, disini u(t) hanya merupakan anggota sebagian dari himpunan Rp.Selain itu pembatasan yang dilakukan mempunyai arti yang penting karena kontrol yangdikenakan pada berbagai sistem harus dibatasi besarnya, juga biasanya banyaknya kontrolfisibel yang digunakan.
Jelas bahwa dalam hal tsb. diatas tidak memadai lagi memproses dengan metoda yangtelah disajikan terdahulu. Pontryagin sudah menunjukkan bahwa yang berkaitan denganadanya pembatasan dari u, kontrol optimal u∗ dipilih tetap harus meminimumkan H.Hasil kerja keras Pontryagin memberikan suatu kontribusi yang berarti dalam teori kontroloptimal yang telah membuktikan fakta bahwa u∗ yang dipilih harus meminimumkan H.Untuk alasan ini, pembahasan yang disajikan disini dinamakan sebagai Prinsip MinimumPontryagin.
Dalam hal daerah kontrol "terbatas" dan "tertutup" kontrol optimalu∗(x, λ, t) diperoleh dengan meminimumkan H(x, u, λ, t) terhadap semua kontrol u dalamdaerah kontrol U , sedangkan fariabel yang lainnya diperlakukan sebagai konstanta. Dengankata lain, H(x, u, λ, t) mempunyai nilai minimum untuk vektor kontrol u∗(x, λ, t) yangsesuai. Dalam hal ini fungsi keadaan Pontryagin menjadi
H∗(x, λ, t) = H(x, u∗(x, λ, t), λ, t)
= minu∈U
H(x, u, λ, t). (8.34)
Bila U tidak dibatasi, jelas persamaan kontrol menjadi
∂
∂uH(x, u, λ, t) = 0
sebagaimana seperti yang telah dibahas.
Berikut ini diberikan ringkasan prosedur menyelesaikan masalah kontrol optimal denganmenggunakan cara minimum Pontryagin.
Diberikan persamaan plant: x(t) = f(x, u, t).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

190 Formulasi masalah kontrol optimal..
Diberikan indeks perilaku: J = h(x(t1), t1) +t1∫
t0
g(x, u, t)dt.
Diberikan konstraian fariabel kontrol: u ∈ U untuk semua t ∈ [t0, t1].
Langkah 1. Bentuk fungsi Pontryagin: H(x, u, λ, t) = g(x, u, t) + λ′f(x, λ, t).
Langkah 2. Minimumkan H(x, u, λ, t) terhadap semua vektor kontrol untuk memperolehu∗ = u∗(x, λ, t).
Langkah 3. Dapatkan fungsi Pontryiagin H∗(x, λ, t) = minu∈U
H(x, u, λ, t).
Langkah 4. Selesaikan sekumpulan 2n persamaan
x(t) =∂H∗(x, λ, t)
∂λpersamaan keadaan
λ(t) = −∂H∗(x, λ, t)
∂xpersamaan ko − keadaan
dengan kondisi-kondisi batas diberikan.
Langkah 5. Untuk memperoleh kontrol optimal substitusikan hasil Langkah 4 kedalamekspresi u∗.
Contoh 53 Misalkan suatu sistem diberikan oleh persamaan keadaan
x1(t) = x2(t)
x2(t) = −x2(t) + u(t).
Indeks perilaku yang diminimumkan adalah
J =1
2
t1∫
t0
(x21 + u2)dt.
Sedangkan kontrol yang dibatasi diberikan oleh pertidaksamaan
|u(t)| ≤ 1, t ∈ [t0, t1].
Dalam hal ini fungsi Pontryagin adalah
H(x, u, λ, t) =1
2x21 +
1
2u2 + λ1x2 − λ2x2 + λ2u.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Persamaan Hamilton-Jacobi.. 191
Dari∂
∂uH(x, u, λ, t) = 0, diperoleh u∗(t) = −λ2(t). Selanjutnya ditinjau beberapa keadaan
untuk memperoleh kontrol optimal yang memenuhi pembatasan yang telah ditentukan.Untuk |λ2(t)| ≤ 1, diperoleh u∗(t) = −λ2(t). Sedangkan untuk |λ2(t)| > 1 diperoleh
u∗(t) =
{
−1, untuk λ2(t) > 11, untuk λ2(t) < 1
Kontrol optimal strategi yang diperoleh diberikan dalam Gambar ??.Dalam hal ini kontrol optimal u∗(t) yang memenuhi kondisi pembatas diberikan oleh
u∗(t) =
−1, untuk λ2(t) > 1−λ2(t), untuk |λ2(t)| ≤ 11, untuk λ2(t) < 1
�
8.3 Persamaan Hamilton-Jacobi
Dalam bagian ini diberikan suatu cara lain untuk menyelesaikan masalah kontrol optimaldengan menggunakan apa yang dinamakan Hamilton-Jacobi. Dinyatakan lagi masalahkontrol optimal yaitu diberikan persamaan (8.12), dicari kontrol u(t), dimana t ∈ [t0, t1]memenuhi (8.12) dengan meminimumkan integral pada (8.13). Diformulasikan lagi per-samaan (8.13) sebagai berikut
J(x(t), ut, t) = h(x(t1), t1) +
t1∫
t
g(x(τ), u(τ), τ)dτ, (8.35)
dimana t ≤ t1, utdef= {u(τ)|t ≤ τ ≤ t1}. Persamaan (8.35) dapat ditulis
J∗(x(t), t) = minut
t1∫
t
g(x(τ), u(τ), τ)dτ + h(x(t1), t1)
(8.36)
atau
J∗(x(t), t) = minut
t+△t∫
t
g(x(τ), u(τ), τ)dτ +
t1∫
t+△t
g(x(τ), u(τ), τ)dτ + h(x(t1), t1)
= minut
t+△t∫
t
g(x(τ), u(τ), τ)dτ + J∗(x(t+△t), t+△t)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

192 Formulasi masalah kontrol optimal..
dimana J∗(x(t+△t), t+△t) adalah J minimum pada interval t+△t ≤ τ ≤ t1. DideretkanJ∗(x(t+△t), t+△t) dengan deret Taylor disekitar (x(t), t), didapat
J∗(x(t), t) = minut
{∫ t+△t
t
g(x(τ), u(τ), τ)dτ + J∗(x(t), t) +
[
∂
∂tJ∗(x(t), t)
]
△t
+
[
∂J∗(x(t), t)∂x
]′△x+ suku tingkat tinggi dalam △t dan △x
}
.
Untuk △t→ 0 dan △x→ 0 didapat
0 =∂J∗(x(t), t)
∂t
△t
△t+min
ut
1
△t
t+△t∫
t
g(x(τ), u(τ), τ)dτ +
[
∂J∗(x(t), t)∂x
]′ △x
△t
=∂J∗(x(t), t)
∂t+min
ut
{
g(x(t), u(t), t) +
[
∂J∗(x(t), t)∂x
]′f(x(t), u(t), t)
}
.
Persamaan (8.36) memenuhi kondisi batas: J∗(x(t1), t1) = h(x(t1), t1). Bila didefinisikanHamiltonian sebagai berikut
H
(
x(t), u(t),∂
∂xJ∗(x(t), t), t
)
= g(x(t), u(t), t) +
[
∂J∗(x(t), t)
∂x
]′f(x(t), u(t), t)
didapat
0 =∂J∗(x(t), t)
∂t+min
ut
{
H(x(t), u(t),∂
∂xJ∗(x(t), t), t)
}
. (8.37)
Bila u(t) dibatasi, maka kontrol optimal didapat dengan meminimumkan Hamiltonian H.Bila tidak, maka syarat perlu u adalah optimal haruslah memenuhi
∂
∂uH
(
x(t), u(t),∂
∂xJ∗(x(t), t)
)
= 0
sedangkan syarat cukupnya adalah
∂2
∂u2H
(
x(t), u(t),∂
∂xJ∗(x(t), t)
)
> 0.
Kontrol optimal diberikan oleh
u∗ = u∗(
x(t),∂
∂xJ∗(x(t), t), t
)
.
Substitusikan u∗ optimal tsb. kedalam persamaan (8.37) didapat persamaan
0 =∂
∂tJ∗(x(t), t) + H∗
(
x(t),∂
∂xJ∗(x(t), t), t
)
. (8.38)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Persamaan Hamilton-Jacobi.. 193
Persamaan (8.38) dinamakan persamaan Hamilton-Jacobi.
Berikut ini diberikan ringkasan prosedur Hamilton-Jacobi untuk menyelesaikan masalahkontrol optimal.
Diberikan persamaan plant: x(t) = f(x, u, t).
Diberikan indeks perilaku: J = h(x(t1), t1) +t1∫
t0
g(x, u, t)dt.
Diberikan konstrain variabel kontrol: u ∈ U untuk semua t ∈ [t0, t1].
Langkah 1. Bentuk Hamiltonian
H(x, u,∂J∗(x, t)
∂x, t) = g(x, u, t) +
[
∂J∗(x, t)
∂x
]′f(x, u, t).
Langkah 2. Minimumkan H(x, u, ∂J∗(x,t)∂x
, t) terhadap semua vektor kontrol untuk mem-peroleh u∗ = u∗(x, ∂J
∗
∂x, t).
Langkah 3. Dapatkan Hamiltonian:
H∗(x,∂J∗
∂x, t) = H(x, u∗(x,
∂J∗
∂x, t), t)
Langkah 4. Selesaikan persamaan Hamilton-Jacobi
∂J∗
∂t+H∗(x,
∂J∗
∂x, t)
dengan kondisi batas yang sesuai untuk memperoleh J∗(x, t).
Langkah 5. Substitusikan hasil Langkah 4 kedalam ekspresi u∗ untuk memperoleh kontroloptimal.
Contoh 54 Diberikan x(t) = u(t), x(0) = x0. Dapatkan kontrol u supaya
J =
t1∫
0
(
x2(t) + u2(t))
dt, dengan t1 tertentu
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

194 Formulasi masalah kontrol optimal..
minimum.
Jawab:Syarat batas diberikan oleh
J∗ (x(t1), t1) = h (x(t1), t1) = 0
Sedangkan Hamiltonian adalah
H
(
x(t), u(t),∂
∂xJ∗ (x(t), t)
)
= x2(t) + u2(t) +∂J∗ (x(t), t)
∂xu(t).
Karena u(t) tak dibatasi maka
∂H
∂u= 2u+
∂J∗
∂x= 0 ⇒ u∗(t) = −1
2
∂J∗
∂x
dan∂2H
∂u2= 2 > 0
Jadi H mempuyai nilai minimum. Persamaan Hamilton-Jacobi diberikan oleh:
0 =∂J∗
∂t+ x2 +
1
4
(
∂J∗
∂x
)2
+∂J∗
∂x
(
−1
2
∂J∗
∂x
)
atau∂J∗
∂t+ x2 − 1
4
(
∂J∗
∂x
)2
= 0 (8.39)
dengan kondisi batas J∗(x(t1), t1) = 0. Misalkan penyelesaian (9.17) adalah J∗(x(t), t) =K(t)x2. Didapat ∂J∗
∂x= 2K(t)x dan ∂J∗
∂t= K(t)x2. Dari sini didapat persamaan (8.39)
menjadi
K(t)x2(t) + x2(t)− 1
4
(
4K2(t)x2(t))
= 0(
K(t)−K2(t) + 1)
x2(t) = 0.
Dari persamaan yang paling akhir diatas, didapat persamaan differensial
K(t)−K2(t) + 1 = 0.
Karena J∗(x(t1), t1) = 0, maka K(t1) = 0. Oleh karena itu penyelesaian persamaandifferensial diatas adalah
K(t) = tanh(t1 − t).
Sedangkan kontrol optimal u∗(t) diberikan oleh
u∗(t) = −1
2
∂J∗
∂x= − tanh(t1 − t)x(t).
dn nilai J minimum diberikan oleh:
J∗ = tanh(t1 − t)x2(t).
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Masalah optimal kontrol dengan syarat keadaan akhir bebas.. 195
8.4 Masalah optimal kontrol dengan syarat keadaan akhir
bebas
Sejauh ini pembahsan pada bagian-bagian terdahulu dengan asumsi nilai-nilai keadaanawal dan keadaan akhir tetap. Pada bahasan berikut ini dikaji nilai keadaan awal (x(t1))tetap sedangkan nilai keadaan akhir (x(t2)) bebas. Pada Subbagian 8.1.1 telah diturunkansuatu persamaan berbentuk
t2∫
t1
∂g
∂xη(t)dt+
∂g
∂xη(t)
∣
∣
∣
∣
t2
t1
−t2∫
t1
η(t)d
dt
∂g
∂xdt = 0
Dalam kasus kajian sekarang ini, η(t1) = 0 dan η(t2) sebarang (karena x(t2) bebas). Olehkarena itu didapat persamaan
t2∫
t1
[
∂g
∂x− d
dt
∂g
∂x
]
η(t)dt+∂g
∂x
∣
∣
∣
∣
t2
η(t2) = 0.
Karena η(t) sebarang dan η(t2) bebas, maka haruslah
∂g
∂x
∣
∣
∣
∣
t2
= 0 dan∂g
∂x− d
dt
∂g
∂x= 0.
Contoh 55 Dapatkan suatu kurva diantara titik x(t1) = x(0) = 1 dan garis t2 = 4 denganpanjang minimum.
JawabBentuk integral yang akan diminimumkan adalah
J(x) =
4∫
0
ds,
dimana dsdt
= [1 + x2(t)]12 . Integral yan yang akan diminimumkan menjadi
J(x) =
4∫
0
[1 + x2(t)]12dt.
Terlihat bahwa g(x, x = [1 + x2(t)]12 , dalam hal ini persamaan Euler-Langrange diberikan
oleh
− d
dt
[
x
[1 + x2(t)]12
]
= 0,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

196 Formulasi masalah kontrol optimal..
dari persamaan diatas didapat persamaan differensial x(t) = 0 yang penyelesaiannyaadalah x(t) = c1t + c2. Nilai konstanta c1 dan c2 masing-masing diberikan oleh c1 = 0dan c2 = 1 yang didapat dari dua syarat batas x(0) = 1 dan ∂g
∂x|t=4 = 0. Jadi peyelelesaian
yang memenuhi dua syarat batas tsb. adalah x(t) = 1 dan J(x) minimum bernilai 4.
CatatanHasil nilai x(t) = 1 yaitu merupakan garis lurus yang melalui titik (0, x(0)) = (0, 1) dantegak lurus garis t = 1 tidak sulit dihitung secara biasa. Contoh diatas sekedar memberikangambaran untuk menyelesaikan masalah dengan nilai keadaan akhir bebas. Sedangkansyarat ∂g
∂x|t=4 = 0 mempunyai peranan untuk menentukan satu nilai batas yang memang
dibutuhkan untuk memperoleh nilai satu konstanta dalam penyelesaian persamaan differ-ensial yang dikaji.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono
Bab 9Linier Quadratic Regulator (LQR)
Sebagaimana telah diketahui bila sistem terkontrol dan teramati dalam pendisainan su-atu kompensator untuk masukantunggal-keluarantunggal dapat tempatkan pole loop-tutupdimana saja sesuai yang diinginkan. Walaupun pole loop-tutup menentukan kecepatan(bandwidth) dan damping dari respon hal ini belum cukup untuk memberikan hasil yangterbaik dari pendisainan, dengan kata lain belum memberikan suatu hasil yang optimal.
Beberapa alasan mengapa kajian kontrol optimal diperlukan diberikan sebagai berikut.Pertama untuk mencari kontrol optimal dalam suatu sistem banyakmasukan-banyakkeluar-an, teknik penempatan pole yang telah dikenal tidak menguraikan secara lengkap dankhusus kontroler atau parameter kompensator (gain). Misalnya, diberikan plan denganorder-k dengan sebanyak m masukan dan keseluruhan vektor keadaan dapat diakses un-tuk umpan-balik. Dalam hal ini, suatu kontroler tak-dinamik sebanyak nk parameterharus ditentukan, tetapi hanya sebanyak k lokasi pole loop-tutup yang mungkin. Jadiharus diatur sebanyak m kali yaitu sesuai banyaknya parameter sebagai pole. Ada banyaktakhingga cara supaya pole loop-tutup yang sama bisa dicapai. Timbul pertanyaan, caraapa yang terbaik? Algorithma apa yang bisa digunakan untuk menentukan gain umpan-balik? Tentu dalam pandangan praktis ketersediaan parameter yang digunakan sekecilmungkin dari yang dibutuhkan untuk mencapai lokasi pole loop-tutup yang diharapkanakan memberikan keuntungan yang besar. Tetapi ketiadaan algorithma yang definitif un-tuk menentukan suatu hukum kontrol tunggal adalah suatu kerugian bagi pendisainer sis-tem yang tidak mengetahui bagaimana menangani kesulitan ini. Dengan pemilihan suatuhukum kontrol untuk mengoptimalkan perilaku sistem kesulitan ini bisa diatasi.
Suatu alasan yang lebih meyakinkan untuk mencari kontroler optimal adalah pendi-sainer menyadari tidak mengetahui lokasi pole loop-tutup yang diharapkan. Pemilihanlokasi pole jauh dari titik asal memberikan respon dinamik sangat cepat tetapi membu-tuhkan signal kontrol sangat besar untuk menghasilkan sumber daya yang dibutuhkan.Penggunaan gain yang dapat menghasilkan signal tsb. dengan tiadanya pembatas daridaya yang digunakan dapat mengakibatkan signal kontrol melebihi batas pisik, misalnyasaja menimbulkan "saturasi". Dalam kasus yang demikian, perilaku dinamik sistem loop-
197

198 Linier Quadratic Regulator (LQR)..
tutup tidak bisa diprediksi dengan analisa linier dan bahkan mungkin tak-stabil. Untukmembatasi hal ini sering perlu untuk membatasi kecepatan respon sehingga tujuan pendi-sainan tercapai tanpa terjadi saturasi. Alasan lain untuk membatasi kecepatan responadalah suatu harapan untuk menghindari "noise" yang secara khusus menyertai sistemgain-tinggi. Para insinyur yang mempunyai pengalaman luas yang diperolehnya denganintuisi mengenai proses penempatan lokasi pole-tutup yang tepat. Tetapi ia berhadapandengan suatu proses yang tak-dikenalnya untuk mengontrol dan tidak cukupnya waktuuntuk memperoleh keperluan mendalam, para insinyur akan menyadari suatu metode dis-ain dikembangkan yang bisa memberikan suatu pengetahuan disain awal. Teori optimisasiyang telah berkembang bisa menyelesaikan masalah ini.
Suatu alasan lain digunakannya teori kontrol optimal adalah pemrosesan yang dikon-trol mungkin tak-terkontrol. Dalam hal ini terdapat beberapa ruang bagian dari ruangkeadaan pemrosesan yang mana vektor keadaan tidak bisa dipengaruhi oleh sinyal kon-trol yang sesuai. Perilaku dinamik dari sub-ruang ini bukanlah inti masalah kontrol olehkarenanya tidak semua pole dari sistem loop tutup bisa ditempatkan sesuai yang diiginkanoleh pendisain. Maka dari itu pendisainan dengan penempatan pole-pole tidak akan mem-buahkan hasil yang diinginkan. Tetapi bila menggunakan teori kontrol optimal dan tanpamenentukan banyak persyaratan perilaku sistem yang tidak mungkin, hal ini tentunyamemungkinkan untuk untuk mendisain suatu sistem kontrol untuk mengkontrol sebanyakmungkin yang bisa dikontrol. Lagi pula, bila perilaku dari bagian yang tak-terkontroladalah stabil, maka perilaku keseluruhan sistem akan bisa diterima.
Pada bagian ini dibahas masalah kontrol optimal yang dikenal dengan nama "LQR".Operasi dalam LQR banyak dilakukan dengan matriks, khususnya yang berkaitan denganpengertian matriks simetri, matriks definit positip dan matriks semi definit positip. Olehkarena itu sebelum dinyatakan masalah LQR, terlebih dahulu diberikan pengertian dari apayang telah disebutkan diatas. Juga karena dalam masalah kontrol optimal sering dilakukandifferensial dari suatu fungsi terhadap waktu t, pada bagian ini juga akan diberikan aturandifferensial dari fungsi matriks atau fungsi vektor.
9.1 Matriks semi-definit positip dan definit positip
Matriks A ukuran n × n dikatakan semi-definit positip bila untuk setiap vektor x 6= 0dengan n komponen berlaku x′Ax ≥ 0, dan dikatakan definit positip bila x′Ax > 0.
Pada pembahasan LQR sangat memudahkan perhitungan bila bekerja dengan matrikssimetri. Dalam hal ini selalu dapat dibentuk matriks simetri dari suatu matriks yang taksimetri, matriks simetri ini akan mempunyai sifat yang sama berkenaan dengan kedefini-tannya. Bila A suatu matriks tak simetri, matriks simetri A dapat dibentuk sebagaiA = 1
2[A+ A′].
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kontrol loop buka.. 199
Contoh 56 Diberikan matriks
A =
(
4 20 1
)
dan x =
(
x1x2
)
dengan x1 6= 0, x2 6= 0.
Didapat
x′Ax = 4x21 + 2x1x2 + x22= ax21 + bx1 + c.
Dari persamaan diatas terlihat bahwa x′Ax = ax21+bx1+c merupakan suatu parabola yangselalu positip untuk semua nilai x1. Hal ini bisa ditunjukkan sebagai berikut: parabolaterbuka keatas sebab a = 4 > 0, diskriminan dari parabola D = b2 − 4ac = 4x22 − 16x22 =−12x21 < 0 untuk x2 6= 0.
Bila matriks simetri A diberikan sebagai berikut:
A =1
2[A+ A′] =
(
4 11 1
)
,
maka didapat x′Ax = x′Ax > 0.
�
Beberapa fakta differensial dari fungsi matriks/vektor diberikan sebagai berikut. Bilavektor x = x(t), c vektor konstan masing-masing dengan n komponen dan matriks konstanA berukuran n× n, maka
1. ddt[x′(t)Ax(t)] = x′(t)[A′ + A]x(t),
2. ddx
[c′x] = ddx
[x′c] = c,
3. ddx
[x′(t)Ax(t)] = Ax(t) + A′x(t).
4. Dan bila f = f(x) dan g = g(x), maka ddx
[f ′g] = ∂f
∂xg + ∂g
∂xf .
Berikut ini diformulasikan masalah yang berkenaan dengan LQR yang dibedakan dalamdua kasus yaitu kontrol loop-buka dan kontrol loop-tutup. Pembedaan ini erat kaitannyadengan dua persamaan yaitu persamaan Lyapunov dan persamaan Aljabar Riccati.
9.2 Kontrol loop buka
Diberikan suatu sistem berbentuk
x(t) = Ax(t) +Bu(t), x(t) ∈ Rn, u(t) ∈ R
p, A ∈ Rn×n, B ∈ R
n×p, (9.1)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

200 Linier Quadratic Regulator (LQR)..
dengan keadaan awal dan keadaan akhir masing-masing diberikan oleh x(t0) = x0 danx(t1) = x1. Dapatkan u yang memenuhi (9.1) dengan syarat bentuk integral berikut
J =1
2
t1∫
t0
u′(t)Ru(t)dt (9.2)
mempunyai nilai minimum, dimana R matriks simetri definit positip berukuran p × pyang dipilih oleh pendisainer berdasarkan pada tujuan pengontrolan. Selanjutnya untukmenyelesaikan masalah LQR ini, dibentuk Hamiltonian yang diberikan sebagai berikut
H =1
2u′(t)Ru(t) + λ′(t) [Ax(t) +Bu(t)] .
Dari Hamiltonian ini didapat
λ(t) = −∂H∂x
= −A′λ(t) ⇒ λ(t) = eA′(t1−t)λ(t1)
0 =∂H
∂u= Ru(t) +B′λ(t) ⇒ u(t) = −R−1B′eA
′(t1−t)λ(t1).
Persamaan (9.1) menjadi
x(t) = Ax(t)− BR−1B′eA′(t1−t)λ(t1)
dan penyelesaiannya adalah:
x(t) = eA(t−t0)x0 −t∫
t0
[
eA(t−τ)BR−1B′eA′(t1−τ)λ(t1)
]
dτ
Untuk menghitung λ(t1) didefinisikan:
P (t)dif.=
t∫
t0
[
eA(t−τ)BR−1B′eA′(t−τ)
]
dτ
Dengan menggunakan aturan Leibnitz untuk integral diperoleh:
P (t) =
t∫
t0
d
dt
[
eA(t−τ)BR−1B′eA′(t−τ)
]
dτ + eA(t−t)BR−1B′eA′(t−t) dt
dt
−eA(t−t0)BR−1B′eA′(t−t0)
dt0dt
= AP (t) + P (t)A′ +BR−1B′.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kontrol loop buka.. 201
Didapat persamaan differensial:
P (t) = AP (t) + P (t)A′ +BR−1B′ (9.3)
yang memenuhi syarat awal P (t0) = 0. Persamaan (9.3) dinamakan suatu persamaanLyapunov dan P (t) adalah matriks simetri. Dilain pihak dari syarat x(t1) = x1, didapat:
x1 = eA(t1−t0)x0 −t1∫
t0
[
eA(t1−τ)BR−1B′eA′(t1−τ)
]
dτλ(t1)
= eA(t1−t0)x0 − P (t1)λ(t1). (9.4)
Dari persamaan ini didapat:
λ(t1) = P−1(t1)[
eA(t1−t0)x0 − x1]
.
Jadi kontrol optimal u(t) diberikan oleh:
u(t) = R−1B′eA′(t1−t)P−1(t1)
[
x1 − eA(t1−t0)x0]
(9.5)
dan dengan menggunakan kesimitrian Jmin diberikan oleh:
Jmin =1
2
[
x1 − eA(t1−t0)x0]′P−1(t1)
[
x1 − eA(t1−t0)x0]
.
Sebelum diberikan suatu contoh yang berkaitan dengan LQR loop buka, terlebih dahuludiberikan rinkasan hasil-hasil dari LQR loop buka.
Model Sistem:x = Ax+Bu, t ≥ t0,
dengan x(t0) = x0 diberikan.
Keadaan Akhir yang diharapkan:
x(t1) = x1,
dengan x1 diberikan.
Indeks Perilaku:
J(t0) =1
2
t1∫
t0
u′Ru dt, R > 0.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

202 Linier Quadratic Regulator (LQR)..
Kontrol Optimal Loop-Buka:Persamaan Lyapunov:
P = AP + PA′ +BR−1B′, P (t0) = 0.
Kontrol Loop-Buka:
u(t) = R−1B′eA′(t1−t)P−1(t1)
[
x1 − eA(t1−t0)x0]
.
Biaya Optimal:
J(t0) =1
2
[
x1 − eA(t1−t0)x0]′P−1(t1)
[
x1 − eA(t1−t0)x0]
.
Contoh 57 Dikaji kembali Contoh 52 yaitu sistem yang diberikan oleh:
x(t) =
(
0 10 0
)
x(t) +
(
01
)
u(t)
dengan kondisi awal x1(0) = x2(0) = 1, kondisi akhir x1(2) = x2(2) = 0 dan indeks perilakuJ :
J =1
2
2∫
0
u2(t)dt.
Untuk menyelesaikan persoalan ini digunakan persamaan Lyapunov, didapat:
P (t) =
(
0 10 0
)
P (t) + P (t)
(
0 01 0
)
+
(
0 00 1
)
dimana P (t) adalah matriks simetri dan P (0) = 0. Dari persamaan Lyapunov diatasdidapat:
p1,1(t) = 2p1,2(t), p1,2(t) = p2,2(t), p2,2(t) = 1.
Dengan kondisi awal P (0) = 0, didapat:
p1,1(t) =t3
3, p1,2(t) =
t2
2, p2,2(t) = t.
Jadi matriks P (t) adalah:
P (t) =
(
t3
3t2
2t2
2t
)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kontrol loop buka.. 203
dan kontrol optimal u(t) diberikan oleh:
u(t) = R−1B′eA′(t1−t)P−1(t1)
[
x1 − eA(t1−t0)x0]
= 1.(0 1)
(
1 02− t 1
)(
83
22 1
)−1 [(00
)
−(
1 20 1
)(
11
)]
=(
2− t 1)
(
32
−32
−32
2
)(
−3−1
)
= 3t− 7
2.
Hasil ini sama seperti yang diberikan dalam Contoh 52.
�
Berikut ini diberikan suatu komentar/diskusi yang berkaitan dengan hasli-hasil dari LQRLoop-Buka.
Beberapa Komentar LQR Loop-Buka
Dalam bahasan sebelumnya telah diberikan ringkasan persamaan pendisainan kontrolerLQ keadaan-akhir-tetap yang mengarahkan sistem dari suatu keadaan awal x0 kesuatukeadaan akhir tetap sesuai yang diharapkan yaitu x1 sekaligus juga meminimumkan enerjikontrol J(t0).
Sesuai hasil ringkasan yang diberikan pada pembahasan sebelumnya, kontrol optimalu(t) yang meminimumkan Indeks Perilaku J(t0) sekaligus juga menjamin keadaan akhirx(t1) = x1 diperoleh sebagai berikut. Pertama, integralkan persamaan Lyapunov dari t0sampai t1 dengan P (t0) = 0 untuk memperoleh P (t1). Dari sini Indeks perilaku minimumbisa dihitung sebelum pengontrol dijalankan. Peenghitungan kontrol optimal diberikandalam bentuk memuat P−1(t1).
Karena kontrol u(t) tidak tergantung keadaan x(t) pada saat waktu t, tetapi hanyapada titik akhir khusus dari trayektori keadaan, hal ini adalah kontrol loop-buka. Bilauntuk beberapa alasan yang memungkinkan keadaan x(t) mengganggu jejak optimal, makatidak ada cara bagi pengontrol untuk mengatasi hal ini, oleh karena itu keadaan akhir x(t1)umumnya tidak akan sama dengan nilai yang diharapkan yaitu x1. Dalam hal ini kontrolloop-buka tidak robust terhadap gangguan atau ketidakpastian parameter dalam matrikssistem. Pada bagian berikutnya akan diturunkan LQR loop-tutup.
Karena kontrol adalah loop-buka, bila diinginkan pengontrol u(t) dapat dihitung dahuludan dismpan didalam memory komputer sebelum kontrol dijalankan. Maka kontrol inidapat dipakai pada plant untuk mencapai tujuan selama phase implementasi aktual.
Penyelesaian persamaan homogin pada saat waktu t1 adalah:
x(t1) = eA(t1−t0)x0, (9.6)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

204 Linier Quadratic Regulator (LQR)..
dari sini diperoleh x1 − eA(t1−t0)x0 adalah beda diantara keadaan akhir yang diharapkanyaitu x1 dengan kedaan akhir sebenarnya dari sistem. Hal ini akan bermakna bahwakontrol optimal sebanding dengan beda tsb. Bila beda tsb. sama dengan nol, maka tidakakan ada kontrol yang diperlukan untuk membuat keadaan x(t) menuju kekeadaan akhirx1 pada waktu t1.
Keujudan kontrol optimal dijamin bila dan hanya bila matriks P (t1) nonsingulir. KarenaR diasumsikan nonsingulir dan positip hal ini berkaitan dengan keterkontrolan plan. Jadibila pasangan matriks (A,B) terkontrol, maka ada suatu kontrol enerji minimum yangmengarahkan sebarang keadaan awal kesebarang keadaan akhir yang diinginkan.
Perhatikan bahwa nilai optimal dari indeks perilaku hanya bergantung pada keadaanawal x0 dan keadaan akhir x1. Jadi diberikan keadaan awal keadaan akhir yang diharap-kan, kontrol enerji yang dibutuhkan dapat dihitung sebelum kontrol optimal u(t) dikenakanpada sistem. Bila kontrol ini terlalu besar, maka akan terlalu banyak enerji yang dibu-tuhkan. Dalam kejadian ini, kontrol u(t) seharusnya didisain ulang dengan pemilihan suatuinterval waktu (t1− t0) yang lebih sebesar. Hal ini menurut (9.4) matriks Graminian P (t1)menjadi lebih besar, sehingga menurut (9.5) besar dari kontrol optimal akan menjadi lebuhkecil.
Berikut ini diberikan contoh LQ kontrol loop-buka. Contoh ini adalah analitik di-dalam alamiah sebagaimana maksudnya untuk menunjukkan aspek perhitungan persamaanpendisainan dalam ringkasan yang telah diberikan.
Contoh 58 Kontrol loop-buka suatu motor DC.
Asumsikan beban torsi nol, relasi transfer dari suatu kontrol dinamo motor DC adalah:
ω =km
(Ls +R)(Jms+ bm) + kmk′mu (9.7)
dengan ω(t) kecepatan keluaran, kontrol u(t) adalah voltage dinamo, km torsi konstan, k′mtorsi e.m.f konstan, L adalah induktansi kumparan dinamo, R adalah resistan dinamo, Jmadalah momen inersia rotor dan bm adalah damping ekivalen rotor konstan.
Pengabaian waktu konstanta elektrik L/R yang biasanya agar supaya besarnya lebihkecil dari waktu konstanta mekanik Jm/bm, model (9.7) dapat ditulis sebagai:
ω =k
1 + sτu (9.8)
dimana
k =km
Rbm + kmk′m, τ =
RJmRbm + kmk′m
. (9.9)
Model variabel keadaannya diberikan oleh:
x = −ax+ bu (9.10)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono
Kontrol loop-tutup.. 205
dengan ω(t) = x(t), a = 1τ
dan b = kτ.
Kecepatan awal x(0) = w0 diketahui. Tujuannya adalah mengendalikan motor kesuatukecepatan akhir yang diharapkan yaitu x(t1) = ω1 pada suatu waktu akhir yang ditentukanyaitu t1. Agar supaya menggunakan enerji kontrol minimum diinginkan indeks perilakunyaberbentuk:
J =1
2
t1∫
0
ru2(t) dt. (9.11)
Persamaan Lyapunovnya adalah:
p = −2ap +b2
r, (9.12)
yang penyelesaiannya untuk p(0) = 0 diberikan oleh
p(t) =
t∫
0
e−2a(t−τ) b2
rdτ =
b2
2ar(1− e−2at), (9.13)
sedangkan pengontrol optimalnya diberikan oleh:
u(t) =a(ω1 − ω0e
−at1)
b sinh at1eat. (9.14)
Disini perlu diberikan catatan bahwa kontrol u(t) tidak tergantung pada bobot pengontrolr, hal ini disebabkan u(t) adalah skalar.
Penyelesaian dari persamaan keadaan (9.10) diberikan oleh:
x(t) = e−atx(0) +
t∫
0
e−a(t−τ)bu(τ)dτ. (9.15)
Dengan menggunakan persamaan (9.14) dan (9.15) keadaan x(t) diberikan oleh:
x(t) = ω0e−at + (ω1 − ω0e
−at1)sinh at
sinh at1, (9.16)
dan untuk t = t1 diperoleh x(t1) = ω1.
�
9.3 Kontrol loop-tutup
Hasil-hasil kajian pada bagian ini akan sering digunakan pada kajian yang berikutnyadikarenakan bermanfaat untuk menyelesaikan masalah sistem linier yang berkaitan dengan
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

206 Linier Quadratic Regulator (LQR)..
kontrol umpan-balik. Hal ini beda dengan kontrol loop-tutup yang dibahas pada bagiansebelumnya. Keuntungan dari umpan balik diantaranya adalah mereduksi sensitifitas,meregulasi sendiri, tegar terhadap gangguan dll.
Ditinjau lagi sistem linier berbentuk
x(t) = Ax(t) +Bu(t), x(t) ∈ Rn, u(t) ∈ R
p, A ∈ Rn×n, B ∈ R
n×p, (9.17)
dengan keadaan awal x(t0) = x0. Sekarang sebagai keadaan akhir x(t1) hanya dibutuhkanmendekati nol pada saat waktu akhir yang ditentukan uaitu t1. Jadi dalam hal ini keadaanakhir bebas dan diingini untuk memilih pengontrol u(t) yang memenuhi (9.17) serta mem-inimumkan indek perilaku berbentuk:
J(t0) =1
2x′(t1)Px(t1) +
1
2
t1∫
t0
[x′(t)Qx(t) + u′(t)Ru(t)] dt. (9.18)
Matriks bobot kontrol R, matriks bobot keadaan Q dan matriks bobot keadaan akhirP (t1) adalah matriks-matriks simetri dipilih oleh pendisain yang bergantung pada tujuanpengontrolan sebagaimana yang akan terlihat. Seperti hal sebelumnya, bila elemen-elemendari matriks P (t1) dipilih besar, maka nilai keadaan akhir x(t1) harus lebih kecil untukmempertahankan nilai indeks perilaku kecil.
Diasumsikan bahwa matriks-matriks Q dan P adalah semidefinit-positip. Jadi, masing-masing Q dan P mempunyai nilai karakteristik taknegatif dengan demikian masing-masingx′Qx dan x′Px adalah tak-negatif untuk semua x(t). Begitu juga diasumsikan bahwamatriks R adalah definit positip, yaitu R mempunyai nilai karakteristik positip, sehinggau′Ru > 0 untuk semua u(t) 6= 0. Dalam hal ini J adalah selalu terbatas kebawah denganbatas bawah nol. Karena bentuk kuadrat dari keadaan dan kontrol muncul di (9.18),dicoba untuk meminimumkan enerji secara umum (dalam hal ini misalnya ditinjau bilabeberapa komponen keadaan adalah kecepatan atau voltage atau arus listrik).
Karena digunakan suatu indeks perilaku kuadrat untuk mengatur keadaan dari sistemke nol, tetapi tanpa membutuhkan sebarang nilai keadaan akhir yang tetap, dinamakanhal ini adalah masalah LQR keadaan akhir bebas.
Untuk menyelesaikan masalah LQR, dibentuk Hamiltonian yang diberikan sebagaiberikut
H =1
2x′(t)Qx(t) +
1
2u′(t)Ru(t) + λ′(t) [Ax(t) +Bu(t)] , (9.19)
dengan λ(t) ∈ Rn adalah suatu pengali yang takdiketahui.Dari Hamiltonian ini diperoleh persamaan keadaan dan ko-keadaan
x(t) = Ax(t) +Bu (9.20)
λ(t) = −Qx(t) −A′λ(t), (9.21)
dan kondisi stasioner:
0 =∂H
∂u= Ru(t) +B′λ. (9.22)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kontrol loop-tutup.. 207
Dari persamaan stasioner ini diperoleh kontrol optimal:
u(t) = −R−1B′λ(t). (9.23)
Substitusikan persamaan (9.23) kedalam persamaan (9.20), didapat:
x(t) = Ax(t)− BR−1B′λ(t). (9.24)
Bila hasil ini digabungkan dengan persamaan ko-keadaan kedalam persamaan sistem Hamil-tonian homogin, diperoleh:
(
x
λ
)
=
(
A −BR−1B′
−Q −A′
)(
xλ
)
(9.25)
dengan kondisi batas x(0) = x0 dan λ(0) = 0. Matriks koefisien dari persamaan (9.25)dinamakan matriks Hamiltonian. Nilai karakteristik dan vektor karakteristik dari matriksini sangat penting didalam penganalisaan LQR invarian-waktu.
Keadaan awal x(t0) diketahui bernilai x0. Waktu akhir t1 adalah tetap, sedangkankeadaan akhir x(t1) bebas. Disamping itu persamaan (9.25) adalah linier dan x(t) sertaλ(t) secara linier bergantung pada x0, dengan demikian λ(t) secara linier bergantung padax(t). Oleh karenanya dicoba penyelesaian λ(t) mempunyai bentuk:
λ(t) = P (t)x(t), (9.26)
dengan P (t) adalah matriks n× n belum diketahui.Untuk memperoleh matriks P (t), didifferensialkan persamaan ko-keadaan (9.26) dan
dengan menggunakan persamaan keadaan (9.24) diperoleh:
λ = P x+ P x = P x+ P (Ax− BR−1B′Px). (9.27)
Gabungkan persamaan (9.21) dan (9.27), diperoleh:
−P x = (A′P + PA+Q− PBR−1B′P )x. (9.28)
Karena persamaan (9.28) berlaku untuk setiap x(t) dengan t < t1, diperoleh:
−P = (A′P + PA+Q− PBR−1B′P ). (9.29)
Persamaan (9.29) dinamakan persamaan Riccati yang merupakan persamaan linier dalamP (t). Matriks P (t) bisa diperoleh dengan menyelesaian persamaan Riccati. Dalam hal inikontrol optimal u(t) diberikan oleh:
u(t) = −R−1B′P (t)x(t). (9.30)
Dari sini didefinisikan matriks gain Kalman K(t) sebagai berikut:
K(t) = R−1B′P (t), (9.31)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

208 Linier Quadratic Regulator (LQR)..
sehingga diperoleh hukum kontrol umpanbalik-keadaan:
u(t) = −K(t)x(t). (9.32)
Berikut ini dihitung biaya optimal dengan menggunakan pengontrol ini. Pertama diberikandulu persamaan berbentuk:
1
2
t1∫
t0
d
dt[x′Px] =
1
2x′(t1)P (t1)x(t1)−
1
2x′(t0)P (t0)x(t0) (9.33)
atau
1
2
t1∫
t0
d
dt[x′Px]− 1
2x′(t1)P (t1)x(t1) +
1
2x′(t0)P (t0)x(t0) = 0. (9.34)
Tambahkan persamaan (9.34) kedalam persamaan (9.18), didapat:
J(t0) =1
2x′(t0)P (t0)x(t0) +
1
2
t1∫
t0
(
x′Qx+ u′Ru+ x′Px+ x′P x+ x′P x)
dt. (9.35)
Selajutnya dengan menggunakan persamaan (9.30), (9.24) dan persamaan (9.26) didapat:
t1∫
t0
(
x′Qx+ u′Ru+ x′Px+ x′P x+ x′P x)
dt
=t1∫
t0
(
x′Qx+ x′PBR−1B′Px+ x′Px+ x′P x+ x′P x)
dt
=t1∫
t0
(
x′Qx+ x′PBR−1B′Px+ x′Px+ x′P x+ x′P [Ax−BR−1B′Px])
dt
=t1∫
t0
(
x′Qx+ x′Px+ x′P x+ x′PAx)
dt
=t1∫
t0
(
x′Qx+ [x′A′ − x′PBR−1B′]Px+ x′P x+ x′PAx)
dt
=t1∫
t0
(
x′Qx+ [x′A′ − x′PBR−1B′]Px+ x′P x+ x′PAx)
dt
=t1∫
t0
x′(
P + PA+ A′Px′ − PBR−1B′P)
xdt
= 0.
Langkah akhir perhitungan yang telah dilakukan menggunakan persamaan Riccati sehinggadiperoleh hasil integaralnya bernilai nol. Dengan demikian nilai optimal dari biaya menjadi:
J(t0) =1
2x′(t0)P (t0)x(t0). (9.36)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kontrol loop-tutup.. 209
Berikut ini diberikan ringkasan apa yang telah diuraikan berkaitan dengan LQR loop-tutup, setelah itu didiskusikan apa saja yang telah dibahas.
Model Sistem:
x = Ax+Bu, t ≥ t0, dengan keadaan awal x(t0) = x0 diberikan.
Indeks perilaku:
J(t0) =1
2x′(t1)P (t1)x(t1) +
1
2
t1∫
t0
(x′Qx+ u′Ru) dt
denganP (T ) ≥ 0, Q ≥ 0 dan R > 0.
Kontrol umpanbalik optimal:
Persamaan Riccati:
−P (t) = A′P + PA− PBR−1B′P +Q, dengan t ≤ t1 dan P (t1) diberikan.
Gain Kalman:K(t) = R−1B′P (t).
Umpanbalik varian waktu:
u(t) = −K(t)x(t).
Biaya Optimal:
J(t0) =1
2x′(t0)P (t0)x(t0).
Ringkasan LQR optimal yang telah diberikan adalah suatu kontrol sistem umpanbalik.Selajutnya didiskusikan beberapa hal yang berkaitan dengan hukum kontrol yang telahditurunkan.
Masalah LQR optimal ditentukan dengan meyelesaikan terlebih dahulu persamaan Ric-cati untuk suatu matriks pembantu P (t) menggunakan nilai kondisi akhir dari P (t1) yangdipilih untuk mengoptimalkan Indeks Perilaku. Maka gain umpanbalik optimal diberikanoleh gail Kalman K(t). Bahkan bila sistem (A,B) adalah invarian-waktu, kontrol opti-mal u(t) adalah umpanbalik keadaan varian-waktu. Hal ini adalah suatu alasan mengapaKontroler LQ optimal tidak ditentukan dengan menggunakan cara domain-frekuensi.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

210 Linier Quadratic Regulator (LQR)..
Kontrol umpanbalik atau loop-tutup dalam kajian ini lebih bermanfaat dalam duniapraktis dari pada kontrol loop-buka, sebab ia robust terhadap ketidakpastian dalam pa-rameter plan begitu juga terhadap banyak gangguan. Bahkan bila sistem model tidakmendiskripsikan plan eksak, LQR akan memberikan perilaku yang diharapkan bila biladiskripnya mendekati. Kajian lain dari LQR yang penting adalah jaminan sifat-sifat kete-garan (robustness).
Kedaan awal dari plan diketahui. Maka dari itu, uraian dalam ringkasan menunjukkanbisa dihitung biaya optimal sebelum digunakan kontrol terhadap plan. Bila kontrol initerlalu besar, dapat pilih matriks bobot Q,R dan P (t) yang lain dan mencoba disain yanglainnya.
Catatan bahwa dalam bentuk gain Kalman, persamaan Riccati bisa ditulis sebagai:
−P = A′P + PA−K ′RK +Q. (9.37)
Dalam bentuk matriks plan loop-titup, persamaan Riccati bisa ditulis sebagai bentuk for-mula Joseph terstabilkan:
−P = (A−BK)′P + P (A− BK)−K ′RK +Q. (9.38)
Berbeda dengan kontroler keadaan-akhir-tetap pada pembahasan sebelummya, keterkon-trolan dari plan tidak dibutuhkan dalam masalah LQR. Berkaitan dengan apakah sifatketerkontrolan ini dipenuhi, LQR akan memberikan hasil yang terbaik untuk memini-mumkan indeks perilaku. Hal ini akan dibahas pada pembahasan berikutnya, yaitu keterkon-trolan dari plan akan memberikan sifat-sifat yang baik bagi sistem loop tutup terutamabila waktu akhir t1 menuju takhingga.
Penting juga dicatat uraian yang telah dibahas bergantung pada fakta bahwa sistem danmatriks bobot indeks perilaku adalah konstan. Namum demikian, persamaan-persamaanyang muncul dalam ringkasan juga akan berlaku bila kasus A(t), B(t), Q(t) dan R(t) adalahvarian-waktu.
Contoh 59 LQR Motor DC menggunakan model skalar.
Dalam Contoh 58 dibahas kontrol optimal loop-buka untuk motor DC dengan menga-sumsikan model skalar
x = −ax+ bu, (9.39)
dengan x(t) adalah kecepatan motor. Disini akan didapatkan kontrol umpanbalik optimalyang meminimumkan indeks perilaku:
J =1
2p1x
2(t1) +1
2
t1∫
0
(qx2 + ru2)dt (9.40)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Kontrol loop-tutup.. 211
untuk waktu akhir t1 dan bobot p1, q, r tertentu.Sebagaimana rangkuman dalam ringkasan, persamaan Riccatinya adalah:
−p(t) = −2ap− b2
rp2 + q, t ≤ t1 (9.41)
dengan kondisi akhir p(t1) = p1. Gain Kalmannya adalah:
k =b
rp (9.42)
dan kontrol umpan balik optimalnya dalah:
u = −kx. (9.43)
Untuk memperoleh p(t) digunakan pemisahan variabel, diperoleh:
p1∫
p(t)
dp
(b2/r)p2 + 2ap− q=
t1∫
t
dt, (9.44)
bila masing-masing ruas persamaan (9.44) diintegral diperoleh:
p(t) = σ2 +σ1 + σ2
[(p1 + σ1)/(p1 − σ2)]e2β(t1−t)−1(9.45)
dimana
β =
√
a2 +b2q
r, (9.46)
danσ1 =
r
b2(β + a), σ2 =
r
b2(β − a). (9.47)
Terlihat bawha, untuk khasus skalar kontrol optimal LQ suatu umpanbalik varian-waktu dengan bentuk yang rumit diberikan oleh persamaan (9.42) dan (9.45). Apapunhal ini, untuk tujuaan implementasi hanyalah perlu menghitung gain Kalman K(t) danmenyimpannya didalam memori komputer untuk digunakan dalam plan.
Hasil yang didapat menarik untuk dikaji perilaku keadaan-steadi dari kontrol optimalbila interval kontrol [0, t1] menjadi besar. Bila interval ini menjadi besar, nilai keadaansteadi matriks s∞ dari matriks s(t) diberikan oleh:
p∞ =ar
b2
(
√
1 + γ − 1)
(9.48)
dengan "rasio keeffektifan kontrol" diberikan oleh
γ =b2q
a2r. (9.49)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

212 Linier Quadratic Regulator (LQR)..
Sedangkan plan loop-tutup keadaan steadinya adalah:
x = (−a− bk∞)x = −(
a+b2
rp∞
)
, (9.50)
ataux = −a
√
1 + γx. (9.51)
Selanjutnya perhatikan bahwa kalau rasio q/r meningkat, sistem loop-tutup menjadilebih stabil. Sehingga, peningkatan bobot keadaan q atau suatu penurunan dalam bobotkontrol r akan mempercepat respon optimal loop-tutup. Hal ini disebabkan kalau nilaiq/r meningkat, bobot indeks perilaku x(t) menjadi lebih mengecil. Bila nilai t besar akanlebih mempercepat menuju nol serta bobot u(t) lebih mengecil, hal ini akan menjamin x(t)bernilai kecil.
9.4 Keadaan-steadi dan kontrol suboptimal
Tealah kaji bahwa untuk plan invarian-waktu kontrol optimal LQ adalah suatu umpanbalik-keadaan varian-waktu. Umpanbalik yang demikian ini sulit diimplemtasi karena mem-butuhkan tempat penyimpanan didalam memori komputer untuk gain-gain yang varian-waktu. Dalam bagian ini akan diberikan suatu alternatif skema kontrol gain Kalmanvarian-waktu K(t) diganti dengan suatu nilai konstan untuk keadaan-stedi (bila t → ∞).Didalam banyak aplikasi penggunaan gain umpanbalik-keadaan steadi ini adalah memadai.
Kontrol Keadaan-Steadi.
Misalkan plan yang akan dikntrol mempunyai bentuk linier:
x = Ax+Bu, (9.52)
dengan x ∈ Rn dan masukan kontrol u(t) ∈ Rm. Dalam bagian ini diasumsikan plan adalahinvarian-waktu.
Selanjutnya diinginkan memilih pengontrol yang meminimumkan indeks perilaku kuadrat:
J(t0) =1
2
∞∫
0
(x′Qx+ x′Rx) dt, (9.53)
dengan Q ≥ 0 dan R > 0. Karena interval integrasi takhingga, dinamakan hal ini indeksperilaku horizon takhingga. Sekarang tujuannya adalah berkaitan dengan suatu intervalkontrol berbentuk [0,∞).
Hukum kontrol yang diperoleh sebelumnya tetap bisa dipakai, hanya saja sekarang perlupersamaan Riccati diintegral pada suatu interval takhingga. Misalkan bahwa persamaan
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keadaan-steadi dan kontrol suboptimal.. 213
Riccati mempunyai suatu penyelesaian limit sedemikian hingga P menuju nol untuk nilai(t1 − t) besar, dalam hal ini diperoleh:
0 = A′P + SA− PBR−1B′P +Q. (9.54)
Persamaan (9.54) dinamakan persamaan aljabar Riccati. Penyelesaian limit P∞ dari per-samaan differensial Riccati bila ada, adalah penyelesaian dari persamaan aljabar Riccati.Kebalikannya tidak benar, yaitu penyelesaian definit positip dari persamaan aljabar Ric-cati mungkin bukan limit penyelesaian persamaan Riccati. Lagi pula, persamaan aljabarRiccati bisa mempunyai penyelesaian yang tidak simetri dan sekedar persamaan kuadratskalar yang bisa mempunyai penyelesaian real atau kompleks.
Bila limit penyelesaian P∞ dari persamaan Riccati ada, maka gain Kalman adalahmatriks konstan yang diberikan oleh:
K∞ = R−1B′P∞. (9.55)
Jadi, kontrol optimal keadaan-steadi adalah umpanbalik-keadaan konstan yang diberikanoleh:
u(t) = −K∞x(t). (9.56)
Dalam hal ini biaya optimal diberikan oleh:
J = x′(0)P∞x(0). (9.57)
Sedangkan plan loop-tutupnya diberikan oleh:
x = (A−BK∞)x = Acx. (9.58)
Kemanfaatan dari kontrol sederhana ini menggunakan suatu umpanbalik konstan adalahjelas. Oleh karena itu diturunkan beberapa pertanyaan untuk menentukan kegunaan dariskema yang dikemukan sebagai berikut:
1. Bilamana ada penyelesaian limit P∞ terbatas dari persamaan Riccati untuk semuapilihan bobot keadaan akhir P (t1)?
2. Umumnya P∞ bergantung pada P (t1). Apapun hal ini, formulasi baru yang telahdiuraikan tidak mengandung P (t1). Jadi, bilamana ada suatu penyelesaian P∞ yangtidak tergantung pada pilihan dari P (t1)?
3. Bilamana plan loop-tutup Ac stabil asimptotik?
Jawaban dari pertanyaan yang diajukan ini secara mendasar sangat penting bagi teoriLQ yang disajikan dalam dua teorema berikut.
Teorema 23 Misalkan (A,B) dapat distabilkan. Maka untuk setiap P (t1) ada suatu limitpenyelesaian P∞ terbatas dari persamaan Riccati. Lagipula, P∞ adalah suatu penyelesaiandari persamaan aljabar Riccati yang semi-definit positip.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

214 Linier Quadratic Regulator (LQR)..
�
Teorema 24 Misalkan (A,C) dapat diamati dengan C memenuhi Q = C ′C. Maka (A,B)dapat distabilkan bila dan hanya bila:
1. Ada tunggal penyelesaian limit definit-positif simetri P∞ dari persamaan Riccati.Lagi pula, P∞ adalah penyelesaian tunggal definit-positip dari persamaan aljabarRiccati.
2. Plan loop-tutup Ac stabil asimptotik.
�
Hasil-hasil dari dua teorema ini tidak dapat ditekankan secara berlebihan. Hasil-hasil ini berati bahwa sepanjang sistem dan indeks perilaku memenuhi hal pokok tertentukeadaan steadi LQR akan menberikan gain yang menstabilkan sistem. Hal ini adalah su-atu sifat yang sungguh baik sekali, mengingat kesulitan yang dijumpai pada teknik kontrolklasik dalam banyak-masukan.
Sebagaimana dapat dilihat dengan membandingkan dua teorema diatas, keteramatandari (A,C) sangat memperkuat hasil. Sifat ini, secara kasarnya berarti bahwa semuabentuk plan sebaiknya dibobot dalam indeks perilaku. Bila J terbatas, maka x′Qx+u′Ruakan mengecil dengan bertambahnya waktu. Lagi pula, bila semua keadaan dapat diamatidalam indeks perilaku, hal ini akan menjamin bahwa x(t) akan cenderung mengecil denganbertambahnya waktu, dengan demikian kestabilan loop-tutup dijamin.
Pole-pole loop-tutup akan bergantung pada pilihan dari pendisainan matriks-matriksQ dan R, apapun hal ini pole-pole akan selalu stabil sepanjang memilih R > dan Q ≥ 0dengan (A,C) dapat diamati, dimana Q = C ′C. Jadi elemen-elemen dari Q dan R bervari-asi selama dalam prosedur interaktif menggunakan bantuan komputer dalam pendisainanuntuk memperoleh perilaku loop-tutup yang sesuai. Yaitu, gain optimalK diperoleh untuknilai-nilai Q dan R diberikan dan respon loop tutup diperoleh lewat simulasi. Bila responini tidak sesuai, nilai-nila baru untuk Q dan R dipilih dan pendisanan dulang lagi. Salahsatu perangkat lunak untuk memperoleh matriks K adalah MATLAB.
Contoh berikut akan mengilustrasikan kebergantungan dari pole-pole loop-tutup padaQ dan R.
Aktualnya, pasangan (A,C) dapat diamati tidak diperlukan untuk menjamin suatu sis-tem loop-tutup stabil. Semua yang dipersyaratkan adalah kondisi lewah dari keteramatandimana hal ini berkaitan dengan keteramatan dari bentuk takstabil A.
Contoh 60 Keadaan steadi disain LQ untuk sistem-sistem yang memenuhi hu-kum Newton.
Diberikan sistem
x(t) =
(
0 10 0
)
x(t) +
(
01
)
u(t) = Ax+Bu, (9.59)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keadaan-steadi dan kontrol suboptimal.. 215
dimana keadaan x = (p v)′ dengan p(t) adalah posisi dan v(t) adalah kecepatan dankontrol u(t) adalah percepatan. Dalam contoh ini diingini mengilustrasikan disain LQkeadaan steadi masalah regulator dari sistem, jadi dicari suatu kontrol loop-tutup.
Untuk mengatur keadaan ke nol, tentukan indeks perilaku:
J =1
2
∞∫
0
(x′Qx+ u2)dt (9.60)
dengan
Q =
(
q2p 00 qv
)
.
Catatan bahwa tidak ada gunanya meliput suatu bobot kontrol r secara terpisah sebabhanya rasio q2p/r dan qv/r yang penting dalam J .
Dalam contoh ini, diinginkan untuk menentukan beberapa hasil analitik guna melihatpengaruh parameter-parameter qp dan qv dalam pendisainan.
a. Gain Kalman Keadaan-Steadi.
Catatan bahwa matriks C yang memenuhi Q = C ′C adalah:
C =
(
qp 00
√qv
)
,
dengan (A,C) dapat diamati dan (A,B) dapat dikontrol. Dengan demikian Teorema24 menjamin bahwa persamaaan aljabar Riccati mempunyai penyelesaian tunggal definit-positip dan gain Kalman keadaan-steadi akan menstabilkan sistem. Selajutnya akan di-tentukan gain stabil K. Karena penyelesaian persamaan aljabar Riccati P adalah simetri,maka diasumsikan sebagai berikut:
P =
(
p1 p2p2 p3
)
. (9.61)
Substitusikan A,B,Q dan R = I kedalam persamaan aljabar Riccati dan sederhanakandiperoleh persamaan berikut:
0 = −p22 + q2p (9.62)
0 = p1 − p2p3 (9.63)
0 = 2p2 − s23 + qv. (9.64)
Hal ini mudah diselesaikan dengan urutan (9.62), (9.64) dan (9.63), didapat:
p2 = qp (9.65)
p3 =√
qv + 2qp (9.66)
p1 = qp√
qv + 2qp. (9.67)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

216 Linier Quadratic Regulator (LQR)..
Hasil yang diperoleh dipilih supaya P definit-positif.Gain Kalman diberikan oleh:
K = R−1B′P = (p2 p3) = (qp√
qv + 2qp). (9.68)
b. Analisa Plan loop-tutup.
Plan loop-tutup diberikan oleh:
Ac = A− BK =
(
0 1−qp −
√
qv + 2qp.
)
(9.69)
Polinomial karakteristik dari Ac adalah:
s(λ) = λ2 +√
qv + 2qpλ+ qp. (9.70)
Dalam hal ini frekuensi natural dan rasio damping masing-masing diberikan oleh:
ωn =√qp, (9.71)
dan
ξ =1√2
√
1 + qv/2qp. (9.72)
Pengaruh dari pendisainan parameter pada ω dan ξ sekarang terlihat jelas, dengandemikian bobot qp dan qv dapat dipilih sesuai dengan perilaku yang diinginkan. Lagipulaterlihat bahwa kehebatan dari disain LQ modern jelas yaitu plan loop-tutup stabil untuksebarang pilihan qp dan qv yang dapat diterima. Suatu pendekatan takdibuat-buat ter-hadap pendisainan adalah mencakup langsung pilihan elemen-elemen dari matriks gain K.Bagaimanapun, kestabilan tidak dijamin untuk semua pilihan nilai-nilai K. Dilain pihak,tidak jadi masalah bobot apapun yang dipilih dalam indeks perilaku, sepanjang (A,C)dapat diamati dan Q ≥ 0, sistem loop-tutup dijamin stabil oleh Teorema 24.
Kestabilan dari loop-tutup dijamin walaupun plan dibidang kompleks dengan banyakmasukan dan banyak keluaran, sedangkan teknik klasik untuk masalah masukan/keluarantunggal tidak mudah bisa diterapkan. Tentunya hasil-hasil yang telah dicapai ini sunguhberdaya guna.
Catatan bahwa, bila bobob kecepatan qv nol, maka damping rasion bernilai 1/√2.
Dilain pihak, qp = 0 tidak diijinkan sebab (A,C) tidak dapat diamati.
�
Contoh 61 Kontrol Horizon mundur-Suatu cara mudah menstabilkan suatu sis-tem
Diinginkan mengarakan sistem berbentuk:
x = Ax+Bu (9.73)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keadaan-steadi dan kontrol suboptimal.. 217
dari suatu keadaan awal x(t) yang diberikan pada saat waktu t keadaan akhir nol padasaat waktu t+ t1 dengan t1 tetap, yaitu:
x(t + t1) = 0. (9.74)
Untuk memperoleh tujuan pengontrolan ini dipilih u(t) yang meminimumkan perilakuindeks:
J =1
2x′(t+ t1)P1x(t + t1) +
1
2
t+t1∫
t
(x′Qx+ u′Ru)dt, (9.75)
dengan P1 = ∞, Q ≥ 0, R > 0.Kontrol u(t) yang diperlukan diberikan oleh gain umpanbalik dalam rangkuman ringkas-
an pada pembahasan LQR loop-tutup. Untuk mendapatkannya, bentuk berikut
−P (t) = A′P + PA− PBR−1B′P +Q (9.76)
harus diintegral secara mundur dari t+ t1 ke t menggunakan P1 = ∞. Perluh diperhatikanbahwa interval integrasi mempunyai panjang konstan sebesar t1 untuk semua t, oleh karenaitu matriks P (t) berukuran n×n yang dibutuhkan untuk menentukan gain Kalman adalahsama untuk semua t, hal ini akan memberikan suatu gain umpanbalik konstan.
Untuk menghindari ketakhinggaan dari kondisi akhir pada (9.76) didefinisikan S = P−1
dan menggunakan S−1 = −S−1SS−1 untuk memperoleh:
S = AS + SA′ −BR−1B′ + SQS, t ≤ t1, S(t1) = 0. (9.77)
Telah dihapus pergeseran konstan dari t didalam interval integrasi.Selajutnya diperoleh umpanbalik konstan kontrol optimal:
u = −Kx (9.78)
denganK = R−1B′S−1(0). (9.79)
Jadi diperoleh suatu hukum umpanbalik keadaan konstan.Bisa dittunjukkan bahwa selama (A,B) dapat dikontrol hukum kontrol (9.78) dan (9.79)
akan menstabilkan sistem.
�
Kontrol Suboptimal
Telah dilihat bahwa bila masalah LQ horizon takhingga mempunyai suatu penyelesaiankeadaan steadi yaitu bila (A,B) dapat distabilkan dan (A,C) dapat diamati. Maka, per-samaan aljabar Riccati (9.54) mempunyai suatu penyelesaian tunggal definit-positip yang
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

218 Linier Quadratic Regulator (LQR)..
menghasilkan gain Kalman K∞ diberikan oleh (9.55). Gain keadaan-steadi ini selalu men-stabilkan plan.
Pada kajian berikut ini walaupun interval kontrol [0, t1] tidak takhingga tetap bisadiputuskan untuk menggunakan gain Kalman K∞ sebagai ganti dari gain optimal varianwaktu K(t). Pada suatu interval hingga [0, t1] gain kostan K∞ adalah suboptimal, tetapiketidak harusan mengimplementasikan suatu gain varian-waktu dapat lebih mengejar hi-langnya keoptimalan. Disamping itu bila t1 menjadi besar K(t) mendekati K∞ oleh karenaitu keputusan menggunakan gain keadaan-steadi akan lebih bermakna.
Kegunaan dari gain keadaan-steadi K∞ pada suatu interval kontrol hingga adalah men-jadi suatu strategi kontrol suboptimal. Lagipula, untuk implementasi gain umpanbalik kon-stan, kontroler suboptimal ini mempunyai keuntungan penting lainnya yaitu perhitunganuntuk menyelesaikan persamaan aljabar Riccati menjadi effisien.
Berikut ini akan diketahui bagaimana bila digunakan bukan gain optimal yang dikaitkandengan indeks perilaku.
Misalkan, digunakan hukum umpan balik
u = −Fx (9.80)
dimana F adalah sebarang gain umpanbalik tetap yang menghasilkan suatu sistem loop-tutup stabil
x = (A− BF )x. (9.81)
Dengan menggunakan (9.80) indeks perilaku diberikan oleh:
J =1
2x′(t1)P (t1)x(t1) +
1
2
t1∫
t0
x′ [Q+ F ′RF ]xdt. (9.82)
Selanjutnya bila ada matriks P sedemikian hingga
d
dtx′Px = −x′ [Q+ F ′RF ]x, (9.83)
maka diperoleh:
J =1
2x′(t0)P (t0)x(t0). (9.84)
Differensialkan bagian kiri dari (9.83) dan gunakan (9.81 kemudian hapus trayektorikeadaan (sebab persamaan berlaku untuk semua x(t0)), diperoleh:
−P (t) = (A− BF )′P + P (A− BF ) +Q+ F ′RF. (9.85)
Jadi, untuk setiap gain umpanbalik tidak peduli optimal atau tidak dapat ditentukan nilaiJ sebagai berikut. Pertama, selesaikan (9.85) secara mundur dalam waktu dengan meng-gunakan bobot akhir P (t1) yang disediakan. Maka biaya yang dikaitkan dengan meng-gunakan F diberikan oleh (9.84). Nilai ini bisa dibandingkan dengan biaya optimal yang
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keadaan-steadi dan kontrol suboptimal.. 219
diperoleh menggunakan gain Kalman dengan menyelesaikan persamaan Riccati. Dalam halini dapat diputuskan apakah menggunakan suboptimal F ataukah gain Kalman optimalvarian-waktu.
Perlu diketahui jelas bahwa persamaan (9.85) adalah suatu persamaan Lyapunov linierdalam P karena F adalah suatu gain tetap.
Bila diputuskan untuk menggunakan kontrol keadaan-steadi pada suatu interval kontrolhingga, F = K∞ dapat dipilih kemudian hitung (9.84) untuk melihat apa yang berkurangsebagai akibat penyederhanaan dari penggunaan suatu gain konstan.
Contoh 62 Kontrol suboptimal motor DC menggunakan suatu model skalar
Dikaji ulang plan dari model skalar motor DC yang diberikan dalam Contoh 58 dan 59,yaitu:
x = −ax+ bu (9.86)
dengan biaya
J(t0) =1
2p(t1)x
2(t1) +1
2
t1∫
t0
(
qx2 + ru2)
dt. (9.87)
Kontrol optimal adalah suatu umpanbalik varian-waktu
u∗ = −K∗(t)x, (9.88)
dimana
K∗(t) =b
rp∗(t) (9.89)
dan p∗(t) memenuhi persamaan Riccati
−p(t) = −2ap− b2
rp2 + q. (9.90)
Persamaan ini bisa diselesaikan secara analitik untuk memperoleh penyelesaian p∗(t) diberikanoleh (9.45) dalam Contoh 59. Nilai optimal dari biaya pada setiap interval [t, t1] adalah:
J∗(t) =1
2p∗(t)x(t). (9.91)
Misalnya tidak diinginkan berhadapan dengan masalah penyimpanan barisan gain op-timal varian-waktu K∗(t). Sebagai penggantinya, misalkan dicoba menggunakan nilai gainkeadaan-steadi (lihat Contoh 59), yaitu:
K∞ =b
rP∞ =
a
b(√
1 + γ − 1) (9.92)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

220 Linier Quadratic Regulator (LQR)..
dengan
γ =b2q
a2r(9.93)
sedangkan hukum umpanbalik konstan diberikan oleh
u = −K∞x. (9.94)
Untuk melihat hasil penggunaan umpanbalik sederhana ini, diselesaiakan (9.85). Per-samaan ini adalah:
−p(t) = 2acp +K2∞r + q, (9.95)
dengan matriks loop-tutup ac adalah:
ac = −a− bK∞ = −a√
1 + γ. (9.96)
Perhatikan bahwa ac selalu stabil disebabkan a > 0. Penyelesaian persamaan (9.95)diberikan oleh:
p(t) = e2ac(t1−t)p(t1) +K2
∞ + q
2ac(e2ac(t1−t) − 1). (9.97)
Sketsa gambar dari penyelesaian p∗(t) dan p(t) yang diberikan oleh persamaan (9.97) dis-ajikan dalam Gambar 9.1 dengan a = 4, b = 2, r = 1, q = 10, p(t1) = 10. Catatan,nilai suboptimal p(t) yang diberikan oleh (9.97) adalah batas bawah dari p(t), jadi biayasuboptimal:
J(t) =1
2p(t)x2(t) (9.98)
selalu lebih besar atau sama dengan J∗(t) optimal dalam (9.91).
Gambar 9.1: Kurva suboptimal.
Catatan penyelesaian limit dari p(∞) dan p∗(∞) keduanya diberikan oleh:
p(∞) =ar
b2(√
1 + γ − 1), (9.99)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keadaan-steadi dan kontrol suboptimal.. 221
sehingga indeks perilakunya adalah:
J(0) =1
2
∞∫
0
[x′qx+ u′ru] dt (9.100)
pada interval takhingga [0,∞) biaya optimal mempunyai nilai yang sama baik digunakanumpanbalik optimal dalam (9.89) ataupun dalam (9.92). Ini berarti bahwa sepanjang inter-val kontrol [t0, t1] menjadi lebih besar hal ini membuat semakin berati untuk menggunakanumpanbalik konstan K∞. Hal ini juga tampak pada Gambar 9.1.
�
Disain struktureigen LQR
Disini didiskusikan suatu pendekatan lain terhadap disain kontrol keadaan-steadi dengantidak meyelesaiakan persamaan aljabar Riccati (9.54). Misalkan (A,B) dapat-distabilkandan (A,C) dapat-diamati dengan demikian kondisi Teorema 24 dipenuhi. Diinginkan un-tuk menunjukkan bahwa sebagai pengganti dari menyelesaikan persamaan aljabar Riccati(9.54)untuk P∞ dan kemudian menggunakan (9.55) untuk mendapatkan gain keadaan-steadi K∞, dapat ditentukan P∞, K∞ dan pole-pole loop-tutup secara langsung dari ma-triks H dalam sistem Hamiltonian:
(
x
λ
)
=
(
A −BR−1B′
−Q −A′
)(
xλ
)
≡ H
(
xλ
)
(9.101)
Faktanya akan ditunjukkan bahwa pole-pole dari sistem loop-tutup optimal
x = (A− BK∞)x ≡ Acx, (9.102)
dengan K∞ gain Kalman keadaan-steadi adalah tepat sama dengan nilaieigen stabil dariH
Berikut ini diturunkan sifat khusus dari H. Misalkan
J =
(
0 I−I 0
)
. (9.103)
Maka mudah ditunjukkan bahwaH = JH′J.
Bila µ adalah suatu nilaieigen dari H dengan vektoreigen v, maka
Hv = µv,
dan karena J−1 = −J , maka dariJH′Jv = µv
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

222 Linier Quadratic Regulator (LQR)..
diperolehH′Jv = −µJv.
Jadi(Jv)′H = −µ(Jv)′
terlihat bahwa −µ adalah nilaieigen dari H dengan vektoreigen kiri Jv. Ini berarti bahwaH mempunyai sebanyak n nilaieigen stabil serta sebanyak n nilaieigen takstabil yang meru-pakan pencerminan pada titik pusat dalam bidang kompleks.
Bentuk (9.101) dan (9.102) adalah cara ekivalen untuk mengkarakterisasi kedinamikanloop-tutup dalam pengaruh kontrol optimal pada interval waktu takhingga [0,∞). Teo-rema 24 menjamin kestabilan (9.102). Oleh karena itu dapat ditunjukkan bahwa nilaieigendari sistem loop-tutup optimal adalah tidak lain dari pada n nilaieigen stabil dari H. Untukmembuktikan hal ini, misalkan µi adalah suatu nilaieigen dari sistem loop-tutup optimal.Maka bila hanya mode µi yang berperan dan karena λ(t) dan u(t) adalah linier dalam x(t),maka didapat:
x(t) = Xieµit (9.104)
u(t) = Uieµit (9.105)
λ(t) = Λieµit (9.106)
dengan vektor-vektor Xi, Ui dan Λi tidak nol. Gunakan ini dalam x = Ax+Bu, didapat:
(µiI −A)Xi = BUi.
Menurut (9.56)Ui = −K∞Xi, (9.107)
sehingga(µi − (A−BK∞))Xi = 0 (9.108)
terlihat bahwa µi adalah suatu nilaieigen dari sistem loop-tutup dengan vektoreigen Xi.Selanjutnya, ditinjau sistem Hamiltonian (9.101). Dari persamaan (9.104) dan (9.106)
diperoleh:
µi
(
Xi
Λi
)
= H
(
Xi
Λi
)
.
Terlihat bahwa, µi juga suatu nilaieigen dari H dengan vektoreigen (X ′i Λ′
i)′.
Teorema 24 mengatakan bahwa sistem loop-tutup adalah stabil, jadi nilaieigen dariloop-tutup optimal adalah n nilaieigen stabil dari H.
Gain umpanbalik optimal bisa ditentukan dari struktureigen H. Untuk melihat halini, misalkan bahwa nilaieigen-nilaieigen dari loop-tutup optimal adalah sederhana. Maka(9.23) menunjukkan bahwa untuk setiap i berlaku
Ui = −R−1B′Λi.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keadaan-steadi dan kontrol suboptimal.. 223
Gabung hasil ini dengan (9.107) didapat:
K∞Xi = R−1B′Λi.
Misalkan X adalah matriks n×n dengan kolom-kolomnya dalah Xi dan Λ adalah matriksn× n dengan kolom-kolomnya adalah Λi, maka diperoleh
K∞ = R−1B′ΛX−1. (9.109)
Hasil ini memberikan gain Kalman keadaan-steadi dalam bentuk struktureigen dari H.Bila µi kompleks, maka gain yang diperoleh lewat cara ini juga kompleks, jadi tidak bisa
diimplementasi. Dalam kejadian ini kompleks konjugate dari µi yaitu µ∗i juga nilaieigen
dan menurut (9.109) gain harus memenuhi
K∞(Xi X∗i ) = R−1B′(Λi Λ∗
i ).
Jika kedua ruas dikalikan dengan L, didapat
K∞(Xi X∗i )L = R−1B′(Λi Λ∗
i )L,
dimana
L =
(
12
− j
212
j
2
)
dengan j =√−1. Jadi diperoleh:
K∞(
Re(Xi) Im(Xi))
= R−1B′ (Re(Λi) Im(Λi))
(9.110)
dimana Re(.) dan Im(.) masing-masing menyatakan bagian real dan imajiner dari suatubilangan kompleks. Jadi, bila µi kompleks adalah perluh untuk menggunakan bagian realdan imajiner dari vektor-vektor Xi dan Λi dalam persamaan (9.109) sebagai penggantivektor-vektor kompleks itu sendiri. Jadi hal ini akan memberikan suatu gain K∞ real.
Telah ditunjukkan bahwa pole-pole sisteme loop-tutup optimal (9.102) adalah n polestabil dari sistem Hamiltonian (9.101). Lagipula vektoreigen yang berkaitan dengan ni-laieigen µi dari plan loop-tutup diberikan olehXi yang merupakan separuh dari vektoreigenH.
Tambahanpula, sebagai pengganti menyelesaikan persamaan aljabar Riccati untuk P∞dan kemudian menyelesaikan (9.55), gain umpanbalik optimal keadaan-steadi dapat diten-tukan dengan cara mendapatkan nilaieigen stabil µi dari matriks Hamiltonian H denganvektoreigen yang terkait diberikan oleh (X ′
i Λ′i)′, selanjutnya menghitung K∞ menggu-
nakan (9.109).Dari (9.109) dan (9.55) jelas bahwa bahwa penyelesaian aljabar Riccati dengan struk-
tureigen dari H diberikan olehP∞ = ΛX−1. (9.111)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

224 Linier Quadratic Regulator (LQR)..
Bila suatu pole-loop tutup µi adalah kompleks, maka dalam (9.109) dan (9.111) bagianreal dan bagian imajiner dari vektor-vektor yang terkait yaitu Λi dan Xi harus digunakanuntuk memperoleh K∞ real dan P∞. Bila nilaieigen dari loop-tutup optimal tidak seder-hana, maka perlu menggunakan vektoreigen tergeneralisasi dalam penghitungan K∞ danP∞.
Perlu dicatat bahwa bila matriks bobot-keadaan Q adalah nol, maka
H =
(
A −BR−1B′
0 −A′
)
. (9.112)
Dalam kasus ini, nilaieigen dari H adalah pole-pole dari A dan pole-pole dari −A. Jadiuntuk memperoleh nilai eigen keadaan-steadi optimal hanya dibutuhkan pole-pole stabildari A bersama-sama dengan pole-pole takstabil dari negatif A. Ini juga adalah pole-poleloop-tutup optimal dalam limit bila matriks bobot-kontrol R menuju takhingga.
Contoh 63 Disain struktureigen LQR untuk sistem yang memenuhi hukumNewton
Dalam Contoh 60 persamaan aljabar Riccati diselrsaikan untuk memperoleh gain Kalmankeadaan-steadi untuk sistem yang memenuhi hukum Newton:
x =
(
0 10 0
)
x+
(
01
)
u, (9.113)
dimana keadaan x =(
p v)′
dengan p(t) posisi, v(t) kecepatan dan kontrol u(t) adalahsuatu masukan percepatan. Dalam contoh ini diinginkan untuk mengilustrasikan disainstruktureigen LQ sistem yang memenuhi hukum Newton ini.
Misalkan indeks perilakunya adalah
J =1
2
∞∫
0
(
x′Qx+ u2)
dt (9.114)
dengan
Q =
(
q2p 00 qv
)
.
Dalam hal ini matriks Hamiltoniannya adalah
H =
0 1 0 00 0 0 −1
−q2p 0 0 00 −qv −1 0
, (9.115)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Keadaan-steadi dan kontrol suboptimal.. 225
sedangkan persamaan karakteristik dari H diberikan oleh
det(sI −H) = s4 − qvs2 + q2p = 0. (9.116)
Karena polinomial ini genap, maka bila s adalah suatu akar dari polinomial tsb., maka −sjuga akar dari polinomial. Selanjutnya misalakn s = s2, sehingga diperoleh
s2 − qvs + q2p = 0. (9.117)
Asumsikan bahwa qp > qv/2, hal ini memberikan suatu pasangan akar-akar komplekstakstabil s1 dan s2 dengan frekuensi dan damping rasio masing-masing diberikan oleh
ω = qp, ξ = − qv2qp
. (9.118)
Jadis1 = ωejθ1, s2 = ωejθ2 (9.119)
dengan−θ2 = θ1 = − cos−1(ξ). (9.120)
Pole-pole dari sistem Hamiltonian adalah ±√s1 dan ±√
s2 atau
√ωe±j
θ12 ,
√ωe±j
θ22 . (9.121)
Karena
cos(α
2) =
√1 + cosα√
2(9.122)
maka dari itu terlihat bahwa sistem Hamiltonian mempunyai empat pole yang terkaitdengan dua pasang kompleks dengan frekuensi natural dan rasio damping masing-masingadalah
ωn =√qp, ξ = ±
√
1 + qv/2qp. (9.123)
Telah ditunjukkan bahwa pole-pole loop-tutup tidak lain adalah pole-pole stabil dari H,jadi pole-pole ini berkaitan dengan pasangan kompleks stabil yang diberikan dalam (9.123)(yaitu, damping rasion positif). Hasil ini sesuai dengan yang dibahas dalam Contoh 60.Sekarang kelihatan jelas bagaimana memilih bobot dalam indeks perilaku yang mempen-garuhi perilaku loop-tutup. Catatan, bila tidak digunakan bobot kecepatan rasio dampingmenjadi bernilai 1√
2.
Untuk menentukan gain umpanbalik optimal didapatkan vektoreigen H dan gunakan(9.109). Karena plan adalah masukan-keluaran tunggal, maka digunakan suatu cara seder-hana untuk pole-pole loop-tutup yang dikenal sebagai formula Ackerman. Diperoleh
K = e′nU−1n △h (A), (9.124)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

226 Linier Quadratic Regulator (LQR)..
dimana e′n adalah baris terakhir matriks satuan berukuran n×n, △h(s) adalah polinomialloop-tutup yang diharapkan dan Un adalah matriks keterkontrolan yang diberikan oleh
U2 =(
B AB)
=
(
0 11 0
)
. (9.125)
Polinomial loop-tutup yang diharapkan adalah
△h(s) = s2 + 2ξωns+ ω2n, (9.126)
dengan ξ dan ωn diberikan oleh (9.123). Substitusikan A0, A dan A2 sebagai ganti s0, sdan s2 dalam persamaan (9.126) diperoleh
△h(A) = A2 + 2ξωnA + ω2nI =
(
ω2n 2ξωn
0 ω2n.
)
(9.127)
Oleh karena itu gain optimal K diberikan oleh
K = e′2U−12 △h (A)
=(
0 1)
(
0 11 0
)(
ω2n 2ξωn
0 ω2n.
)
=(
ω2n 2ξωn
)
=(
qp√
qv + 2qp)
(9.128)
hasil yang diperoleh ini tepat sama dengan apa yang didapat dalam Contoh 60.
�
9.5 Disain Kontrol minimum waktu dan masukan-dibatasi
Suatu bagian penting dari maslah kontrol adalah yang berkaitan dengan pencapaian tujuanperilaku dengan waktu minimum. Indeks peilaku yang sesuai untuk maslah ini adalah
J =
t1∫
t0
dt = t1 − t0. (9.129)
Berikut ini dikaji beberapa macam masalah minimum-waktu.
Masalah waktu-minimum taklinier
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Disain Kontrol minimum waktu dan masukan-dibatasi.. 227
Misalkan tujuannya adalah mengarahkan sistem berbentuk
x = f(x, u) (9.130)
dari suatu keadaan awal x(t0) ∈ Rn ke suatu keadaan akhir tertentu x(t1) dengan waktu-minimum. Maka Hamiltoniannya diberikan oleh
H = 1 + λ′f(x, u) (9.131)
dan persamaan Eulernya adalah
−λ =∂f ′
∂xλ (9.132)
0 =∂f ′
∂uλ. (9.133)
Karena keadaan akhir adalah tetap (jadi dx(t1) = 0) tetapi waktu akhir adalah bebas,maka diperoleh
0 = H(t1) = 1 + λ′(t1)f(x(t1), u(t1)). (9.134)
Bila f(x, u) bukan fungsi eksplisit dalam waktu, maka H(t) nol untuk semua waktu t.Kondisi stasioner (9.133) biasanya dapat digunakan untuk menyelesaikan u(t) dalam
bentuk λ. Kemumudian u(t) dapat dieleminasi dalam persamaan keadaan dan ko-keadaanuntuk memperoleh sistem Hamiltonian. Untuk menyelesaiakan ini, dibutuhkan sebanyakn kondisi awal (x(t0) diberikan) dan n kondisi akhir (x(t1) tertentu). Dalam kasus ini,waktu keadaan akhir t1 takdiketahui. Diselesaikan t1 lewat persamaan (9.133).
Disain Kuadratik Linier Minimum-Waktu
Akan dicari suatu pengontrol optimal untuk sistem yang berbentuk
x(t) = Ax(t) +Bu(t), (9.135)
yang meminimumkan indeks perilaku
J =1
2x′(t1)P (t1)x(t1) +
1
2
t1∫
t0
(1 + x′Qx+ u′Ru) dt (9.136)
dengan P (t1) ≥ 0, Q ≥ 0, R > 0 dan waktu akhir t1 bebas. Tidak ada pembatasan padakeadaan akhir, jadi tujuan dari pengontrolan adalah membuat keadaan akhir cukup kecilsekali. Berkaitan dengan 1
2(t1− t0) muncul dalam integral diinginkan untuk menyelesaikan
hal ini didalam suatu perioda yang singkat.Ini adalah suatu macam indeks perilaku yang menginjinkan untuk suatu pertukaran di-
antara tujuan meminimumkan waktu dengan suatu harapan mejaga keadaan dan kontrol
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

228 Linier Quadratic Regulator (LQR)..
kecil. Jadi bila dipilih Q dan R lebih kecil, suku 12(t1 − t0) dalam indeks perilaku san-
gat besar pengaruhnya, dan kontrol mencoba untuk membuat waktu-transit lebih kecil.Dinamakan ini masalah LQ waktu-minimum.
Disini ditunjukkan bahwa waktu optimal t1 dapat ditentukan menggunakan dPdt
denganP (t) adalah penyelesaian persamaan Riccati.
Hamiltionian H adalah
H =1
2+
1
2x′Qx+
1
2u′Ru+ λ′(Ax+Bu), (9.137)
dengan λ(t) adalah ko-keadaan. Persamaan Eulernya adalah
−λ = A′λ +Qx (9.138)
0 = Ru+B′λ, (9.139)
diperolehu(t) = −R−1B′λ. (9.140)
Perhatikan bahwa dalam khasus ini dx(t1) dan dt1 adalah taknol, tetapi keduanya tidaksaling bergantungan dalam situasi ini kondisi akhirnya dalah
λ(t1) = P (t1)x(t1) (9.141)
H(t1) = 0. (9.142)
Bahkan, karena sistem dan indeks perilaku secara langsung tidak bergantung pada t, makauntuk semua t
H(t) = 0. (9.143)
Perlu dicatat berkaitan dengan (9.143) bahwa hal ini adalah masalah nilai batas yangsama dengan masalah LQR loop-tutup yang telah diselesaiakan pada bagian sebelumnyadengan hasil penyelesaian optimal. Tentunya disini ini menghadapi kesulitan dengan waktuakhir t1 takdiketahui.
Untuk memperoleh waktu akhir t1, ditinjau ulang bahwa untuk semua waktu t
λ = Px (9.144)
u = −R−1B′Px. (9.145)
Gunakan kedua persamaan ini pada t = t0 dan dengan melibatkan persamaan (9.143),didapat
0 = H(t0)= 1
2+ 1
2x′(t0) [PBR
−1B′P +Q + (PA+ A′P )− 2PBR−1B′P ]x(t0).(9.146)
Dari sini diperoleh
0 = 1 + x′(t0)[
PA+ A′P +Q− PBR−1B′P]
x(t0), (9.147)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Disain Kontrol minimum waktu dan masukan-dibatasi.. 229
selajuntnya dengan menggunakan persamaan Riccati pada (9.147), didapat
x′P (t)x∣
∣
∣
t0
= 1. (9.148)
Disain masukan-dibatasi
Pada bagian ini dikaji suatu strategi kontrol yang secara mendasar berbeda dengan kajian-kajian yang terdahulu.
Bila sistem linier yang dikaji berbentuk
x = Ax+Bu (9.149)
dengan x ∈ Rn, u ∈ Rm, maka ini akan menghadapi masalah bila menggunakan indeksperilaku minimum-waktu
J(t0) =
t1∫
t0
1dt, (9.150)
dimana t1 bebas. Hamiltoniannya dalam hal ini adalah
H = 1 + λ′(Ax+Bu), (9.151)
dan kondisi stasionernya adalah
0 =∂H
∂u= B′u. (9.152)
Apa yang dijumpai disini adalah persamaan (9.153) tidak memuat u(t) sehingga tidak bisadigunakan untuk mengungkapkan kontrol u(t) kedalam bentuk λ(t).
Masalah adalah disebabkan H(t) adalah linier dalam u(t). Unutuk meminimumkanhal ini, seharusnya menyeleksi u(t) untuk membuat λ′Bu sekecil mungkin ("kecil" disiniartinya adalah jauh disebalah kiri garis bilangan real). Jadi u(t) harus dipilih dengan besartakhingga sedemikian hingga λ′Bu sama dengan −∞. Jelas cara untuk memnimumkanwaktu ini menggunakan enerji kontrol takhingga.
Karena strategi optimal yang demikian ini tidak bisa diterima, harus didapat suatucara untuk memformulasikan kembali masalah minimum-waktu sistem linier.
Oleh karena itu dikaji maslah minimum-waktu dengan besar masukan dibatasi, Jadiakan digunakan indeks perilaku (9.150) dan keadaan keadaan akhir disyaratkan memenuhi
Ψ(x(t1), t1) = 0 (9.153)
dengan Ψ ∈ Rp. Kondisi umum akhir ini mancakup hal dimana keadaan akhir sama dengansuatu nilai tertentu.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

230 Linier Quadratic Regulator (LQR)..
Oleh karena itu disyaratkan suatu kontrol dengan besar memenuhi pembatasan berikut
|u(t)| ≤ 1 (9.154)
untuk semua t ∈ [t0, t1]. Pembatasan ini berarti bahwa setiap komponen dari vektor-mu(t) harus mempunyai besar tidak lebih dari 1. Bila pembatasan dari komponen u(t) tidakbernilai 1, maka menskala kolom matriks B yang sesuai untuk memperoleh pembatasansebagai mana yang diberikan dalam (9.154)
Persyaratan seperti yang diberikan dalam (9.154) muncul dibanyak masalah dimanabesarnya kontrol dibatasi berkaitan dengan pertimbangan fisika. Misalnya, gaya dorongsuatu roket tertentu mempunyai nilai seminimum mungkin begitu juga voltage dinamodari suatu motor DC.
Masalah kontrol yang disajikan ini adalah mendapatkan suatu kontrol u(t) yang mem-inimumkan J(t0) yang memenuhi (9.150) pada semua waktu dan mengarahkan suatukeadaan awal x(t0) yang diberikan ke keadaan akhir x(t1) yang memenuhi (9.153) untuksuatu fungsi Ψ yang diberikan.
Secara intuisi, untuk meminimumkan waktu strategi kontrol optimal tanpak menggu-nakan usaha maksimum (yaitu plus atau minus 1) pada keseluruhan interval waktu. Halini akan diformalisasikan. Bila suatu komponen kontrol diambil pada suatu nilai di batasdaerah yang dipertimbangkannya (yaitu ±1) hal ini dikatakan tersaturasi.
Persamaan Hamiltoniannya adalah
H(x, u, λ, t) = 1 + λ′(Ax+Bu). (9.155)
Tujuaannya adalah menentukan u(t) dengan pembatasan diberikan oleh (9.154) sedemikian
hingga H(t) minimum. Secara sederhana ini tidak bisa menggunakan kondisi∂H
∂u= 0
dikarenakan fakta bahwa minimum dari H(t) terhadap u(t) bisa dicapai diluar daerahyang dipertimbangkan.
Pontryagin dan rekan-kerjanya sudah menujukkan bahwa dalam kasus kontrol dibatasidengan kondisi stasioner diganti dengan kondisi yang lebih umum tetap memberikan hasilyang memadai, hal ini dikenal dengan prinsip minimum Pontryagin, yaitu
H(x∗, u∗, λ∗, t) ≤ H(x∗, u∗ + δu, λ∗, t) (9.156)
untuk semua δu yang dipertimbang dengan δu adalah variasi dari u dan tanda bintang (∗)menyatakan nilai-nilai optimal. Hal ini juga bisa ditulis sebagai
H(x∗, u∗, λ∗, t) ≤ H(x∗, u, λ∗, t) (9.157)
untuk semua nilai u yang dipertimbangkan. Ini adalah suatu hasil yang sungguh ber-dayaguna yang akan digunakan untuk menyelesaikan masalah minimum-waktu masukan-dibatasi.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Disain Kontrol minimum waktu dan masukan-dibatasi.. 231
Menurut prinsip minimum Pontryagin, kontrol optimal u∗(t) harus memenuhi
1 + (λ∗)′(Ax∗ +Bu∗) ≤ 1 + (λ∗)′(Ax∗ +Bu).
Dari persamaan ini diperoleh bahwa optimal kontrol u∗(t) haruslah memenuhi
(λ∗)′Bu∗ ≤ (λ∗)′Bu (9.158)
untuk semua nila u(t) yang dipertimbangkan. Kondisi ini mengijinkan untuk mengungkap-kan u∗(t) kedalam bentuk ko-keadaan. Untuk melihat hal ini, pertama dikaji dulu kasusmasukan-tunggal.
Misalkan u(t) adalah skalar dan b adalah vektor. Dalam hal ini adalah mudah memilihu∗(t) untuk meminimumkan nilai dari λ′(t)bu(t), (perlu dicatat bahwa minimum bermaknadiinginkan nilai dari λ′(t)bu(t) sedekat mungkin menuju −∞).
Bila λ′(t)bu(t) positif, u(t) = −1 harus dipilih untuk memperoleh nilai positip terbesardari λ′(t)bu(t). Sebaliknya, bila λ′(t)bu(t) negatif, u(t) = 1 harus dipilih untuk membuatnilai λ′(t)bu(t) senegatif mungkin. Bila λ′(t)bu(t) sama dengan nol di saat waktu t, makau(t) bisa diberi nilai sebarang pada saat t sebab λ′(t)bu(t) bernilai nol untuk u(t) sebarang.
Hubungan diantara kontrol optimal dan ko-keadaan ini bisa diungkapkan secara tepatdengan fungsi signum yang didefinisika sebagai berikut
sgn(w) =
1, w => 0taktentu, w = 0−1 w < 0.
(9.159)
Maka kontrol optimal diberikan oleh
u∗(t) = −sng(b′λ(t)). (9.160)
Ungkapan dari u∗(t) ini kedalam bentuk ko-keadaan bisa dibandingkan dengan ungkapandalam (9.140) yang berlaku untuk sistem linier dengan indeks perilaku kuadrat.
Kuantitas b′λ(t) dinamakan fungsi switching. Suatu fungsi switching sederhana dankontrol optimal yang ditentukan ditujukkan dalam Gambar ??. Bila fungsi switchingberubah tanda, kontrol berganti dari nilai ektrimnya ke nilai yang lainnya. Dalam gam-bar, kontrol berganti tanda sebanyak empat kali. Kontrol optimal linier minimum-waktutersaturasi karena selalu terjadi pergantian-kembali diantara nilai-nilai ekstrimnya, olehkarenanya kontrol ini dinamakan kontrol bang-bang.
Bila kontrol adalah suatu vektor-m yaitu vektor dengan m komponen, maka menu-rut prinsip minimum (9.158) u∗(t) perluh dipilih agar supaya nilai dari λ′(t)Bu(t) sebisamungkin mendekati −∞. Untuk mengerjakan hal ini komponen ui(t) harus diplih samadengan 1 bila komponen b′iλ(t) negatif dan sama dengan −1 bila komponen b′iλ(t) posi-tif, dimana bi adalah kolom ke-i dari matriks B. Pilihan kontrol strategi ini membuatkuantitas berikut
λ′(t)Bu(t) =
m∑
i=1
ui(t)b′iλ(t) (9.161)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

232 Linier Quadratic Regulator (LQR)..
sekecil mungkin untuk semua t ∈ [t0, t1].Oleh karena itu diperoleh
u∗(t) = −sgn(B′λ(t)) (9.162)
dalam hal ini didefinisikan fungsi signum untuk suatu vektor w sebagai
v = sgn(w) bila vi = sgn(wi) untuk setiap i, (9.163)
dimana masing-masing vi dan wi adalah komponen ke-i dari v dan w.Adalah mungkin suatu komponen b′iλ(t) dari fungsi switching B′λ(t) bernilai nol sepan-
jang suatu interval-waktu hingga. Bila hal ini terjadi, komponen ui(t) dari kontrol optimaltidak terdifinisi secara-baik oleh (9.158). Keadaan yang demikian dinamakan suatu kondisisingular. Bila berlaku sebaliknya, maka masalah kontrol optimal dinamakan normal.
Bila plan invarian-waktu, maka bisa disajikan beberapa hasil-hasil sederhana yangberkaitan dengan keujudan dan ketunggalan dari kontrol minimum-waktu. Berikut inidiberikan suatu test untuk kenormalan. Plan invarian-waktu (9.149) terkontrol bila danhanya bila matriks
Un =[
B AB . . . An−1B]
(9.164)
mempunyai rank sama dengan n. Bila bi adalah komponen kolom ke-i dari B ∈ Rn×m,maka plan adalah normal bila untuk setiap i
Ui =[
bi Abi . . . An−1bi
]
(9.165)
mempunyai rank sama dengan n; yaitu bila plan terkontrol oleh setiap komponen ui darivektor u ∈ Rm. Kenormalan dari plan dan kenormalan dari masalah kontrol minimum-waktu adalah ekivalen.
Hasil-hasil berikut adalah dari kerja Pontryagin dan kawan-kawan. Misalkan planadalah normal dan diinginkan untuk mengarahkan suatu keadaan awal x(t0) yang diberikankesuatu keadaan akhir yang diharapkan yaitu x(t1) menggunakan pengontrol yang meme-nuhi (9.154) dengan waktu minimum. Maka:
1. Bila keadaan akhir yang diharapkan x(t1) sama dengan nol, maka suatu kontrol mini-mum-waktu ada (exist) bila plan tidak mempunyai pole-pole dengan bagian realpositip.
2. Untuk setiap x(t1) tetap, bila ada suatu penyelesaian masalah minimum-waktu, makapenyelesaian ini tunggal.
3. Selanjutnya, bila sebanyak n pole dari plan semuanya real dan bila ada kontrol minimum-waktu, maka setiap komponen ui(t) dari kontrol optimal bisa bergantian berubahpaling banyak n− 1 kali.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Disain Kontrol minimum waktu dan masukan-dibatasi.. 233
Pada akhirnya prinsip minimum menghasilkan suatu ungkapan yang diberikan oleh(9.162) untuk kontrol optimal u∗, tetapi ini sulit diselesaikan secara langsung untuk mem-berikan kontrol optimal. Sebagai pengganti, akan terlihat bahwa (9.162) menspesifik be-berapa hukum kontrol yang berbeda oleh karena itu harus dipilah-pilah diantara kontrol-kontrol tsb. mana yang optimal. Jadi, prinsip minimum mengharuskan untuk mengujisemua hukum kontrol yang tersaji guna memperoleh keoptimalan.
Untuk mendemontrasikan pengertian-pengertian ini dan menunjukkan bahwa u∗ tetapbisa diungkapkan sebagai hukum kontrol umpan-balik, ditinjau suatu contoh dimensi-duasebab bidang dimensi-dua mudah digambar.
Contoh 64 Sistem Kontrol Minimum-Waktu yang memenuhi hukum Newton
Ditinjau sistem yang memenuhi hukum Newton
y(t) = v(t), (9.166)
v(t) = u(t), (9.167)
dengan y(t) adalah posisi pada saat t, v(t) kecepatan pada saat t dan masukan u(t) adalahpercepatan pada saat t. Keadaan sistem adalah x(t) = (y(t) v(t))′.
Untuk kajian ini percepatan masukan u(t) dibatasi sebagai berikut
|u(t)| ≤ 1. (9.168)
Tujuan kontrol adalah membawa sebarang keadaan awal (y(0) v(0))′ ke suatu keadaanakhir yang diinginkan (y(t1) 0)′ dengan waktu minimum t1. Didefinisikan suatu definisiposisi sebagai
y(t) = y(t)− y(t1), (9.169)
untuk ini dapat˙y(t) = y(t) = v(t). (9.170)
Dalam hal ini secara sederhana didefinisi ulang bidang asal dari (y(t), v(t)) menjadi (y(t1), 0),dengan demikian cukup untuk menentukan kontrol-terbatasi optimal yang mengontrolkeadaan awal (y(0), v(0)) ke keadaan asal dalam waktu minimum. Maka, dalam pelak-sanaan huum kontrol yang diturunkan hanya dibutuhkan mengganti y(t) dengan y(t) −y(t1).
Jadi keadaan akhir adalah tetap pada
Ψ(x(t1), t1) =
(
y(t1)v(t1)
)
= 0. (9.171)
a. Bentuk dari kontrol optimalPersamaan Hamiltoniannya adalah
H = 1 + λyv + λvu,
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

234 Linier Quadratic Regulator (LQR)..
dalam hal ini ko-keadaan adalah λ = (λy λv)′ dan persamaan ko-keadaannya adalah:
λy = 0
λv = −λy.Karena dt1 6= 0, maka keadaan akhir haruslah memenuhi:
0 = H(t1) = 1 + λy(t1)v(t1) + λv(t1)u(t1),
atau dengan menggunakan (9.171), diperoleh:
λv(t1)u(t1) = −1.
dengan x(t0) = x0 dan x(t1) = 0. Dari persamaan
λ(t) = −∂H∂x
= −A′λ(t)
diperoleh λ(t) = e−A′tλ(0). Bila disubstitusikan hasil ini kedalam (9.155), diperoleh
H(x, u, λ) = 1 + λ′(0)e−AtAx(t) + λ′(0)e−AtBu(t).
Dalam masalah kontrol optimal waktu ini, harus meminimumkan H dengan pembatas (??).Pengontrol u(t) yang berpengaruh pada H terdapat dalam λ′(0)e−AtBu(t), maka dari itudidefinisikan kontrol optimal sebagai berikut
u∗(t) =
{
+1, [λ′(0)e−AtB]i < 0−1, [λ′(0)e−AtB]i > 0
9.6 Linier Regulator dengan menentukan derajad kesta-
bilan
Ditinjau sistem terkontrol
x(t) = Ax+Bu, x(t1) = x1,
dengan hukum kontrol linier berbentuk u(t) = Kx. Umpan balik gain K dipilih, kemung-kinan harus memenuhi kriteria:
1 Meminimumkan indeks perilaku kuadrat
J =1
2
∞∫
t1
[x′(t)Qx(t) + u′(t)Ru] dt,
dimana Q matriks simetri semi-definit positip dan R matriks simetri definit positip.Pasangan (C ′, A) dapat diamati dimana C ′C = Q.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Linier Regulator dengan menentukan derajad kestabilan.. 235
2 Letak pole-pole dari sistem loop-tutup
x(t) = (A+BK)x(t)
diinginkan terletak pada suatu lokasi yang diharapkan.
Akan ditunjukkan; adalah mungkin meminimumkan bentuk indeks perilaku kuadrat dandisaat yang sama menjamin bahwa pole-pole dari sistem loop-tutup terletak disebelah kirigaris ℜ(s) = −α, α > 0. Untuk menyelesaikan masalah ini, didefinisikan suatu linierregulator yang dimodifikasi sebagai berikut:
x(t) = Ax(t) +Bu(t), x(t1) = x1,
J =1
2
∞∫
t1
[x′(t)Qx(t) + u′(t)Ru(t)] e2αdt, α > 0,
dimana pasangan (A,B) dan (C ′, A) masing-masing terkontrol dan teramati dengan C ′C =Q. Didefinisikan
x(t) = eαtx(t) dan u(t) = eαtu(t).
Didapat
˙x(t) = (A+ αI)x(t) +Bu(t), x(t1) = eαt1x(t1), (9.172)
J =1
2
∞∫
t1
[x′(t)Qx(t) + u′(t)Ru] dt, , (9.173)
Dari kedua persamaan diatas diperoleh
(A,B) terkontrol ⇒ (A+ αI,B) terkontrol
(C ′, A) teramati ⇒ (C ′, A+ αI) teramati.
Jadi untuk sistem (9.172) dengan indeks perilaku kuadrat (9.173), ada u(t) = Kαx(t)sedemikian hingga sistem loop-tutup berikut
˙x(t) = (A+BKα + αI)x(t) (9.174)
asimtotik stabil. Dalam hal ini umpan balik gain Kα diberikan oleh
Kα = −R−1B′Pα,
dimanaPα(A+ αI) + (A′ + αI)Pα − PαBR
−1B′Pα +Q = 0.
Jadi u(t) optimal diberikan oleh
u(t) = Kαx(t)
= −R−1B′Pαx(t).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

236 Linier Quadratic Regulator (LQR)..
Dan sistem loop-tutup diberikan oleh persamaan berikut
x(t) = (A+BKα)x(t). (9.175)
Dengan demikian karena sistem (9.174) stabil maka sistem (9.175) juga stabil.
Contoh 65 Selidiki, apakah sistem loop-tutup dari sistem loop-buka
x(t) =
(
0 00 1
)
x(t) +
(
11
)
u(t)
dengan indeks perilaku
J =
∞∫
0
[
x21(t) + u2(t)]
dt
stabil?
JawabMasing-masing matriks A,B,Q dan R diberikan oleh
A =
(
0 00 1
)
, B =
(
11
)
, Q = CC ′ =
(√2 00 0
)(√2 00 0
)
=
(
2 00 0
)
dan R = 2.
Bisa dicek langsung walaupun (A,B) terkontrol, tetapi (C ′, A) tak-teramati. Denganmenggunakan persamaan aljabar Riccati diperoleh matriks P :
P =
(
−6 −8−8 16
)
sedangkan matriks gain K diberikan oleh:
K =(
1 −4)
.
Sehingga diperoleh sistem loop tutup:
x = (A+BK)x =
(
1 −41 −3
)
x
dengan nilai-karakteristik matriks A+BK adalah −1 sebanyak dua. Jadi sistem loop-tutupstabil walaupun pasangan (C ′, A) tak-teramati.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Masalah regulator output.. 237
9.7 Masalah regulator output
Diberikan plan dalam model keadaan berbentuk{
x(t) = Ax(t) +Bu(t), x(t1) = x1y(t) = Cx(t),
dimana x(t) ∈ Rn×1, u(t) ∈ Rp×1, y(t) ∈ Rq×1 dan A ∈ Rn×n, B ∈ Rn×p, C ∈ Rq×n. Dalamhal ini tertarik untuk mencari kontrol u(t) yang meminimumkan indeks perilaku berbentuk
J =1
2
t2∫
t1
[y′(t)Qy(t) + u′(t)Ru(t)] dt (9.176)
dimana mana Q adalah matriks simetri semi-definit positip dan R matriks simetri definitpositip. Disubstitusikan y(t) = Cx(t) kedalam persamaan (9.176) didapat
J =1
2
t2∫
t1
[(Cx(t))′Q(Cx(t)) + u′(t)Ru(t)] dt
=1
2
t2∫
t1
[x′(t)(C ′QC)x(t) + u′(t)Ru(t)] dt (9.177)
Bila Persamaan (9.177) dibandingkan dengan hasil-hasil yang telah dibahas diperoleh un-tuk sistem yang teramati dengan perilaku indeks (9.176) suatu kontrol optimal diberikanoleh
u∗(t) = Kx(t) = −R−1B′Px(t),
dimana matriks P memenuhi persamaan Riccati
A′P + PA− PBR−1B′P + C ′QC = 0
Contoh 66 Suatu sistem diuraikan oleh persamaan berikut{
x(t) = Ax(t) +Bu(t),y(t) = Cx(t)
dimana
A =
(
0 11 1
)
, B =
(
1 10 1
)
dan C =(
−1 0)
.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

238 Linier Quadratic Regulator (LQR)..
Sedangkan indeks perilaku diberikan oleh
J =
∞∫
0
[
y2(t) + u21(t) + u22(t)]
dt,
dalam hal ini masing-masing Q dan R diberikan oleh
Q =
(
2 00 0
)
, dan R =
(
2 00 2
)
.
Oleh karena itu kontrol optimal diberikan oleh
u∗(t) = −R−1B′Px(t),
dimana
P =
(
1.441 0, 95860.9586 2.7967
)
diperoleh dari menyelesaikan persamaan Riccati. Jadi J minimum adalah
Jmin =1
2x′(0)
(
1.441 0, 95860.9586 2.7967
)
x(0).
�
9.8 Suboptimal linier regulator
Misalkan sistemx(t) = Ax(t) +Bu(t), x(0) = x0
dengan indeks perilaku
J =1
2
∞∫
0
[x′(t)Qx(t) + u′(t)Ru(t)] dt
dimana CC ′ = Q dan pasangan matriks (C ′, A) teramati. Bila u(t) = Kx(t), makadiperoleh
x(t) = (A+BK)x(t)
dan
J =1
2
∞∫
0
x′(t) [Q +K ′RK] x(t)dt
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Suboptimal linier regulator.. 239
Misalkan suatu fungsi Lyapunov diberikan oleh
V (x(t)) =1
2
∞∫
t
x′(t) [Q +K ′RK] x(t)dt.
Diperoleh
V (x(t)) = −1
2x′(t) [Q +K ′RK] x(t)
Bila V (x(t)) = 12x′(t)Px(t), maka
V (x(t)) =1
2[x′(t)Px(t) + x′(t)P x]
diperoleh
1
2x′(t) [(A+BK)′P + P (A+BK)] x(t) = −1
2x′(t) [Q+K ′RK] x(t).
Dari persamaan terakhir diatas diperoleh persamaan
(A+BK)′P + P (A+BK) +K ′RK +Q = 0 (9.178)
Matriks P bisa diperoleh dari persamaan (9.178). Sedangkan dari V (x(t)) diperoleh
V (x(0)) =1
2
∞∫
0
x′(t) [Q+K ′RK] x(t)dt = J
Jadi J = 12x′(0)Px(0) . Suboptimal diperoleh dengan meminimumkan J yang berkaitan
dengan semua elemen Ki,j, yaitu:
∂
∂ki,j[x′(0)Px(0)] = 0.
Dalam hal ini ada beberapa kasus yaitu
1 Bila matriks umpan balik K tak-dibatasi, maka u(t) optimal akan tak tergantungdari kondisi awal, dalam hal ini didapat
∂P
∂ki,j= 0 untuk semua i, j.
2 Kasus khusus bila
J =1
2
∞∫
0
[x′(t)Px(t)] dt
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

240 Linier Quadratic Regulator (LQR)..
P didapat dari (9.178) dengan R = 0. Dalam hal ini kasus adalah ketergantunganpada kondisi awal. Didefinisikan:
J = E{J} = E{12x′(0)Px(0)}
dengan faribel random x(0) memenuhi
E{x(0)x′(0)} = I, dimana I adalah matriks satuan.
Dalam hal ini fariabel random x(0) diasumsikan terdistribusi seragam pada per-mukaan bola dimensi-n dengan jari-jari tidak sama dengan satu. Diperoleh
J = E{J} = E{12x′(0)Px(0)}
=1
2E{trace[Px(0)x′(0)]}
=1
2trace[PE{x(0)x′(0)}]
=1
2traceP.
Contoh 67 Diberikan sistem
x(t) =
(
0 10 0
)
x(t) +
(
01
)
u(t).
Diharapkan suatu kontrol optimal berbentuk
u(t) = −(
k1 k2)
x(t)
yang meminimumkan
J =1
2
∞∫
0
x21(t)dt,
dengan pembatas k1 = 1. Dari persamaan
(A+BK)′P + P (A+BK) +Q = 0
diperoleh matriks P sebagai berikut
P =
(
1+k22k2
1
1 1k2.
)
Dalam hal ini diperoleh traceP =2+k22k2
. Selanjutnya dari
∂J
∂k2=
1
2
∂(traceP )
∂k2= 0
diperoleh k2 =√2. Jadi kontrol optimal adalah u(t) = −[1
√2]x(t) dan J = 1
2(traceP ) =√
2.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pengakomodasian gangguan luar.. 241
9.9 Pengakomodasian gangguan luar yang bekerja pada
suatu sistem
Diberikan suatu plan diberikan oleh{
x(t) = Ax(t) +Bu(t), x(0) = x0y(t) = Cx(t)
(9.179)
dan pengontrol berbentuk:u(t) = Kx(t) (9.180)
yang meminimumkan perilaku indeks:
J =1
2
∞∫
0
[x′(t)Qx(t) + u′Ru(t)] dt (9.181)
sistem loop-tutup diberikan oleh persamaan:
x(t) = [A +BK]x(t). (9.182)
Pada keadaan stedi bila x(t) = 0 maka limt→∞ x(t) = 0. Diasumsikan suatu gangguankonstan terjadi pada sistem sehingga sistem (9.179) menjadi
{
x(t) = Ax(t) +Bu(t) + Υw(t),y(t) = Cx(t)
(9.183)
Sistem loop-tutup dengan pengontrol (9.180) menjadi
x(t) = [A+BK]x(t) + Υw(t) (9.184)
Pada keadaan stedi x(t) = 0, kedaan stedi xs(t) mempunyai hubungan sebagai berikut:
0 = [A+BK]xs(t) + Υw(t)
atauxs(t) = −[A +BK]−1Υw(t). (9.185)
Dari persamaan (9.185) terlihat peranan gangguan w(t) pada keadaan stedi xs(t). Untukmengatasi gangguan tsb. ditambahkan u0 pada pengontrol u(t) sehingga diperoleh:
u(t) = Kx(t) + u0 (9.186)
dengan demikian sistem loop-tutup menjadi
x(t) = [A+BK]x(t) + Υw(t) +Bu0.
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

242 Linier Quadratic Regulator (LQR)..
Dalam kasus ini, u0 ditentukan sedemikian hingga
Υw(t) +Bu0 = 0, (9.187)
maka dari itu kedaan x(t) akan tetap mencapai nol untuk t→ ∞. Dari persamaan (9.187)diperoleh
u0 = −[B′B]−1B′Υw(t). (9.188)
Selanjutnya untuk menyelesaikan masalah yang berkaitan dengan gangguan, salah satucara adalah menggunakan umpan balik integral. Ditinjau lagi sistem (9.179), dimanax(t), u(t) dan y(t) masing-masing berukuran n × 1, p× 1 dan q × 1. Keluaran y(t) tetapdiharapkan sedapat mungkin mendekati keluaran acuan ya = 0. Diasumsikan sistem(9.179) terkontrol. Untuk maksud diatas, suatu fariabel z(t) ditambahkan pada sistemyang diberikan oleh
z(t) =
t∫
0
y(τ)dτ
sehingga diperoleh
z(t) = y(t)
= Cx(t), z(0) = 0. (9.189)
Dengan penambahan fariabel baru diatas, didapat sistem berbentuk
(
x(t)z(t)
)
=
(
A 0C 0
)(
x(t)z(t)
)
+
(
B0
)
u(t)
y(t) =(
C 0)
(
x(t)z(t)
)
(9.190)
dengan fariabel baru keadaan adalah
x(t) =
(
x(t)z(t)
)
. (9.191)
Timbul suatu pertanyaan apakah sistem baru (9.190)terkontrol bila dan hanya bila sistem(9.179) terkontrol dan rank dari matriks
(
A BC 0
)
sama dengan n+ q. Sistem (9.190) terkontrol bila dan hanya bila matriks
U =
(
B AB A2B . . . An+q−1B0 CB CAB . . . CAn+q−2
)
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Pengakomodasian gangguan luar.. 243
mempunyai rank sama dengan n + q. Diuraikan matriks U menjadi bentuk:
U =
(
B AU0 CU
)
=
(
A BC 0
)(
0 U
I 0
)
, (9.192)
dimanaU =
(
B AB A2B . . . An+q−2B)
.
Bila rank(
B AB A2B . . . An−1B)
= n, maka rank(U) = n. Jadi
rank
(
0 U
I 0
)
= n+ q.
Maka dari itu diperoleh
rank(U) = rank
(
A BC 0
)
.
Didefinisikan u(t) = Kx(t) yang meminimumkan indeks perilaku
J =1
2
∞∫
0
[x′(t)Qx(t) + u′(t)Ru(t)] dt, (9.193)
pengontrol u(t) dapat ditulis sebagai
u(t) = K1x(t) +K2z(t)
= K1x(t) +K2
∞∫
0
y(τ)dτ. (9.194)
Diperoleh sistem loop-tutup yang diberikan oleh
˙x(t) =
(
A+BK1 BK2
C
)
x(t) +
(
Υ0
)
w(t)
dengan keluarany(t) =
(
C 0)
x(t).
Pada keadaan stedi ˙x(t) = 0, hal ini berakibat z(t) → 0 dan y(t) → 0.
Contoh 68 Diberikan suatu sistem
x(t) =
−0.05 0.1 00 −0.361 0.361
−200 0 −10
x(t) +
0010
u(t) +
−0.100
w(t)
y(t) =(
1 0 0)
x(t),
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

244 Linier Quadratic Regulator (LQR)..
dimana
x(t) =
x1(t)x2(t)x3(t)
.
Bisa dicek bahwa (A,B) terkontrol. Akan didesain suatu kontroller untuk mengontroldiviasi, dalam hal ini x1(t) → 0. Untuk hal ini didefinisikan:
z(t) = x4(t) =
t∫
0
x1(τ)dτ.
Sehingga diperoleh˙x = Ax(t) + Bu(t) + Υw(t),
dimana
x(t) =
x1(t)x2(t)x3(t)x4(t)
, A =
−0.05 0.1 0 00 −0.361 0.361 0
−200 0 −10 01 0 0 0
, B =
00100
dan Υ =
−0.1000
.
Bisa dicek (A, B) terkontrol, selanjutnya dipilih indeks perilaku
J =1
2
∞∫
0
[
x′(t)Qx(t) + ru2(t)]
dt,
dimana
Q =
1 0 0 00 0 0 00 0 0 00 0 0 1
dan r = 1
dengan Q =(
C C ′), dimana
Γ′ =
(
1 0 0 00 0 0 1
)
Lagi, bisa dicek bahwa (C ′, A) teramati. Jadi sistem loop-tutup bisa didisain stabil. Se-lanjutnya dihitung matriks gain K, yaitu K = −r−1B′P , dimana matriks P diperoleh daripenyelesaian persamaan Riccati:
A′P + PA− PBr−1B′P +Q = 0.
Dalam hal ini diperoleh K =(
−0.5703 −0.1501 −0.0054 −0.9998)
sedangkan kontroloptimal u(t) diberikan oleh
u(t) = −0.5703x1(t)− 0.1501x2(t)− 0.0054x3(t)− 0.9998
t∫
0
x1(τ)dτ.
�
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono

Daftar Pustaka
[1] G.J. olsder and J.W. van der Woude, "Mathematical Systems Theory", Faculty Tech-nical Mathematics and Informatics Delft University of Technology, the Netherlands,(1994).
[2] M. Gopal, "Modern Control System Theory", Wiley Eastern Limited, (1984).
[3] C.T. Chen, "Linear System Theory and Design", Holt, Rinehart and Wistons, (1984).
[4] R.E. Kalman, P.L. Falb and M.A. Arbit, "Topics in mathematical system theory",Tata McGraw-Hill Publishing Company LTD., (1974)
[5] B. Friedland, "Control System Design", McGraw-Hill Book Company, (1987).
[6] Richard Bronson, "Matrix Operations", International Edition, Schaum’s Outline Se-ries, (1989).
[7] Elok Widihastuti, "Kajian Kriteria Kestabilan Routh-Hurwitz pada Sistem LinearInvarian Waktu", Tugas Akhir S1, Jurusan Matematika FMIPA-ITS, (2002)
[8] Nunik Hariyani, "Kajian Dualitas Keterkontrolan dan Keteramatan pada StabilisasiSistem Kontrol Loop Tutup", Tugas Akhir S1, Jurusan Matematika FMIPA-ITS,(2002)
[9] Fenti Rahayu, "Kajian Realisasi Minimal Fungsi Transfer dari suatu Sistem LinearInvarian Waktu", Tugas Akhir S1, Jurusan Matematika FMIPA-ITS, (2002)
[10] Leslie M. Hocking, ”Optimal Control An Introduction to the Theory with Applica-tions”, Clarendon Press-Oxford, (1991).
[11] Frank L. Lewis, ”Applied Optimal Control and Estimation”, Prentice-Hall Interna-tional, Inc., (1992).
[12] Bernard Friedland, ”Control System Design An Introduction to State-Space Methods”,McGraw-Hill International Editions, (1987).
245

246 DAFTAR PUSTAKA
[13] M.R. Spiegel, ”Theory and Problems of Advanced Mathematics for Engineer and Sci-entists”, Schaumm’s Outline Series, McGraw-Hill International Book Company, Sin-gapore, (1983).
[14] David G. Leunberger, ”Introduction to Dynamic Systems Theory, Models, and Appli-cations”, John Wiley & Sons, (1979).
Sistem Linear dan Kontrol Optimal, Copyright: c©2013 Subiono





























