-
8/8/2019 1989-Single Instruction Multiple Pipeline
Architecture
1/8
SIMP (Single Instruction stream/Multiple instruction
Pipelining):A Novel High-Speed Single-Processor Architecture
Kazuaki Murakami, Naohiko Irie, Morihiro Kuga, and Shinji
TomitaDepartment of Information Systems
Interdisciplinary Graduate School of Engineering SciencesKyushu
University
Fukuoka, 816 JAPAN
AbstractSIMP is a novel multiple instruction-pipeline
parallelarchitecture. It is targeted for enhancing the performance
of SISDprocessors drastically by exploiting both temporal and
spatialparallelisms, and for keeping program compatib ility as
well.Degree of performance enhancement achieved by SIMP depends
on; i) how to supply multiple instructions continuously, and
ii)how to resolve data and control dependencies effectively. We
havedevised the outstanding techniques for instruction fetch
anddependency resolution. The instruction fetch mechanism
employsunique schemes of; i) prefetching multiple instructions with
thehelp of branch prediction, ii) squashing inst ructions
selectively,and iii) providing multipl e conditional modes as a
result. Thedependency resolution mechanis m permits out-of-order
executionof sequential instruction stream. Our out-of-order
executionmodel is based on Tomasulos algorithm which has been used
insingle instruction-pipeline processors. However, it is
greatlyextended and accommodated to multiple instruction
pipeliningwith; i) detecting and identifying multiple
dependenciessimultaneously, ii) alleviating the effects of control
dependenc ieswith both eager execution and advance execution, and
iii) ensuringa precise machine state against branches and
interrupts. Bytaking advantage of these techniques, SIMP is one of
the mostpromising architectures toward the coming generation of
high-speed single processors.1. Introduction
The demand for high-speed single-processors forces
moresophisticated instruction pipelines to be implemented in
SISD(Single Instruction stream/Single Data stream) processors of
awide range from microprocessors to supercomputers.
Theseconventional pipelined SISD processors exploit
temporalparallelism in the process of instruction execution; i.e.,
the processis segmen ted into consecutive subprocesses (stages of a
pipeline).The performance of these processors can be expressed as
theprogram execution time;E=NxCxT,where N is the number of
instructions that mus t be executed, C isthe average numbe r of
cycles per instruct ion, and T is the cycle
Permiss ion to copy without fee all or part of this material is
grantedprovided that the copies are not made or distributed for
direct commer -cial advantage, the ACM copyright notice aad the
title of the publicationand its date appear, and notice is given
that copy ing is by permission ofthe Association for Computing
Machinery. To copy otherwise, or torepublish, requires a fee and/or
specific perm ission.
0 1989 ACM 0884-7495/89/0000/0078$01.50
time. N and C depend on processor architectures; e.g.,
CISCarchitectures decrease N but increase C by
improvingfunctionality of instructions, while RISC architectures
reduce C tonearly 1 but increase N by simplifying the instruction
set.Although processor architec tures may influence T in some
degree,semiconductor technology mostly determines T. Since T has
beendecreasing constantly with advances in VLSI
technology,conventional pipelined SISD processors have enjoyed
speedupsregardless oftheir architectures: CISC or RISC.However, the
physical lower limit of T obviously exists in anysemiconductor
technology, and therefore some architecturalchanges must be
considered for SISD processors.Some innovative approaches of such
cha Ilenges are VLIW (VeryLong Instruction Word) architectures
[Fisher83], which arederivatives of SISD and exploit spatial
parallelism (low-levelparallelism). VLIW architecture decreases N
by specifying two ormore independent operations in an instruction,
withoutincreasing C by having each operation be a
RISC-styleinstruct ion. We have already developed two VLIW
processors: theQA-series (QA-1 and QA-2) [Hagiwara.BO;
Tomita83,861. Toexploit spatial parallelism, the QA-series provide
multip lefunctional units such as quadruple ALIJs, quadruple
memoryaccess units, and a sequencer. QA-1 and QA-2 employ very
longinstruction formats of 160-bits and 256-bits respectively,
foreontrolling every functional unit independent ly. However,
VLIWarchitectures have a serious drawback ; i.e., it is difficult
to keepprogram compatib ility, because their hardware architectures
areexposed to compilers .Other, somewhat old, approaches are found
in singleinstruction-pipeline processors with multipl e
functional-units(called MFU processors), such as the CDC 6600 and
the IBM360/91. MFU processors have potential of reducing C to
nearly 1by having multip le pipelined-functional units busy, and
keep Ncomparable to CISC processors. Unlike V LIW,
programcompatibility is preserved very easily. Nevertheless, the
limitexists to performance enhancement because the instruction
issuerate (= l/C) can not exceed one instruction per cycle.All
these approaches attempt to exploit low-level
fine-grainedparallelism by utilizing multiple functional units. Key
problemsin the exploitation of low-level parallelism are; i) to
detect datadependencies and control dependenc ies, ii) to resolve
thesehazards, and iii) to schedule the order of instruction
execution.VLIW architectures rely solely on clever compilers which
solvethe problems by means of static code scheduling, such as
tracescheduling [Fisher811 and software pipelining [Lam881.
MFUprocessors also solve the problems at run tim e by
implementingdynamic code scheduling in hardware. Static and dynamic
codescheduling methods differ in their domain; i.e., static
codeschedu ling is done with a broad overview of program codes,
butdynamic eode scheduling is done with a peephole. However,
thesecode scheduling methods are not mutually exclusive.
78
-
8/8/2019 1989-Single Instruction Multiple Pipeline
Architecture
2/8
After evaluating the QA-series, we have studied the
feasibilityfor enhancing the performance of SISD processors
drastically bycombin ing both temporal and spatial parallelisms,
and forpreserving program compatibility as well. As a result of
thisstudy, we have introduced the multiple instruction-pipe
lineparallel architecture: SIMP lMurakami881. Given that
Pinstruction pipelines are provided, S IMP processors ideally
reduceC to l/P by fetching P instructions per cycle, and keep
Ncomparable to conventional single-pipelined SISD processors
aswell. As the first implementation of SIMP, we are now
developingthe SIMP processor prototype: r % 1 J. (in Japanese),
whoseEnglish pronunciation is [jlmpu : I. It implies new
streamlineprocessor.The paper is organized in 6 sections. The
following two sectionspresent the rationale of SIMP architecture
(section Z), and givesome background regarding
instruction-pipelining techniques(section 3). In section 4, we
introduce the SIMP processorprototype and discuss its pipeline flow
and instruction-setarchitecture. In section 5, we describe the
instruction fetchmechanism and the out-of-order execution model,
both of whichare devised for the SIMP prototype. Section 6 offers a
fewconcluding remarks.2. Principles of SlMP Pipelined Instruction
Execution
There are various m odels of pipelined instruction
execution.They apply temporal parallelism (i.e., pipelining) and/or
spatialparallelism (i.e., low-level parallelism) to a single
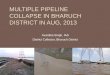
instructionstream, as schematically depicted in Figure 1. We
clarify SIMParchitecture by comparing its instruction pipelining
model withthose of its counterparts such as linear-pipeline, MFU,
andpipelined VLIW. In the discussion here, we assume that
theprocess of instruction execution is decomposed into 5 stages:
IF(instruction fetch), D (instruction decode), OF (operand fetch),
E(execute), and W (result write).2.1 Linear-Pipelined Processor
Most of conventional pipelined SISD processors employ
singlepipeline struc ture shown in Figure l-a. Instruc tions
aresequentially processed one by one from preceding stages
tosucceeding stages. Instructions should enter and leave each
stagein-order with respect to the compiled code sequence. This
pipelinestructure is referred to as a
linearpipeline.Linear-pipelined processors exploit only temporal
parallelism.Pipeline interlo& logic is usually placed between
critical stages todetect and resolve data and control dependencies;
otherwise, theinterlock logic is imposed on a compiler.The maximum
throughput of instruction execution is at mostone instruction per
cycle; i.e., C (the average number of cycles perinstruction) cannot
be less than 1. Thus, the ideal programexecution time of
linear-pipelined processors results in;E=Nxl XT.2.2 MFU
processor
Some pipelined SISD processors such as the CDC 6600, the
IBM360/91 floating-point unit, and the GRAY-1 scalar unit,
providemultiple functional units (MFUs) in E-stage (Figure l-b ).
Eachfunctional unit may or may not be pipelined. Although not
shownin Figure l-b, W-stage can be muttiplied by the number of MFUs
.MFU processors can exploit both temporal and spatialparallelisms.
To increase MFU utilization, most of pipelineinterlock logic is
localized to the stages prior to E-stage. It isreferred to as
insstruction issue logic lWeiss841. Simple instructionissue logic
issues an instruction to an MFU sequentially. Complexissue logic
such as Tomasulos algorithm [Tomasulo67] is capableof dynamic code
scheduling by allowing instructions to beginand/or complete
execution nonsequentially.Even if any instruction issue logic is
employed, however, atmost one instruction can be issued per cycle.
Thus, the maximumthroughput of instruction execution is the same as
in linear-pipelined SISD processors; i.e., C cannot be less than 1.
The idea1
IF D OF E w
(a) Linear-pipe fined processor
(b) MFU processor (case of 4 functional units)
(i+6) thvery long-instruclian
IF D OF E wI\ 1 nOPO OPO I\
OPl OPl OPl OPI i th--.- (its) th-- (i+4).th-- (i+3).th--
(i+Z).th----r- (I+ I).th--svery loOP2 OP2 OP2 DP2 instructio._ ._
_.
OF3 OP3 OP3 OP3J I v I \I I bCc) Pipelined VLIW processor (case
of 4 operations/VLIW)
(i+24) thinstruction(i+25) thinstruction(i+26)
thinstruction(it27) thinrtructian
D OF E wi thmtruction
(i+t) instruction(i+Z) instruction(i+3) instruction
Cd) SIMP processor (case of 4 instruction pipeline s)Figure 1.
Pipelined Instruction Execution Models
program execution time of MFU processors results in;E=Nxl
XT.More complex issue logic capable of issuing multipleinstructions
per cycle are studied so as to reduce C less than 1[TjadenlO;
Acosta86; PleszkunSB]. If F functional units areprovided and the
same number of instructions can be issued eachcycle, the ideal
program execution time now results in;E=Nx(lfF)xT.2.3 Pipelined
VLIW Processor
VLIW processors also provide multiple functional units.Unlike
MFU processors, however, VLIW processors attempt toutilize
functional units by specifying multiple independen toperations in a
single very long instruction . Original, non-pipelined, VLIW
processors such as the QA-series have exploitedonly spatial
parallelism. Since each operation can be pipelined,pipelined VLIW
processors such as the Multiflow TRACE[Colwel1871 and the Cydrome
Cydra 5 lRau891 can now exploitboth temporal and spatial
parallelisms (Figure l-c) .A very long instruction is fetched each
cycle, each operationfield of the instruction is decoded in
parallel, and each decodedoperation is processed simultaneous ly
and independently at thecorresponding functional unit. A clever
compiler is well aware ofthe architecture (e.g., the number of
functional units, the numberof pipeline stages, etc.), and is
responsible for scheduling the orderof operations strictly to
prevent any hazard from causing incorrectresults at run time.
Therefore, no pipeline interlock logic orcomplex instruction issue
logic need be implemented in hardware.
79
-
8/8/2019 1989-Single Instruction Multiple Pipeline
Architecture
3/8
Given that F functional units are provided (e.g., F= 4 in
FigureI-c), pipelined VLIW processors can reduce N(the number of
verylong instructions to be executed) to N/F, where N is the number
ofshort instructions to be executed substantially, by compacting
Foperations into one very long instruction. The ideal
programexecution time of pipelined VLIW processors results in
;E=(NfF)xlxT.2.4 SIMP Processor
SIMP processors employ multiple instruction-p ipeline
structureshown in Figure l-d, and exploit both temporal and
spatialparallelisms. All pipelines should be identical. Each
pipeline maybe either the linear pipeline shown in Figure l-a, or
the MFU-processor-like pipeline shown in Figure l-b.Regardless of
the number of instruction pipelines provided, asingle program
counter (PC) controls the flow of instructionexecution; i.e., a
single instruction stream. Given that Pinstruction pipelines are
provided (e.g., P=4 in Figure l-d),instructions can be processed in
blocks ofP. We refer to this blockas an instruction block, which
consists of successive Pinstructions in an object program. An
instruction block startingwith the instruction specified by c(PC)
and ending with theinstruction specified by c(PC) +P- 1 is fetched
each cycle, wherec(PC) indicates the contents of PC. Each
instruction of aninstruction block is decoded and processed
simultaneously, butdependently, at the corresponding instruction
pipeline.SIMP processors would appreciate the advantages of static
codeschedu ling, but they should exploit spatial parallelism
byscheduling instructions at run time. It is because, unlike
VLIWs,SIMP processors should not expose their hardware
architectures(e.g., the number of instruction pipelines) to such
clever com pilersas used for VLIW processors. In such a case, even
if an ordinarycompiler could increase the dependency distance,
somedependencies may still remain in the compiled code until
runtime. As linear-pipelined and MFU processors do, SIMPprocessors
mus t provide a way to resolve these rema iningdependencies at run
time.From a standpoin t of program compatib ility, the above is
amajor difference between SIMP and VLIW. For VLIW, it is
notimpossible but difficult to have compiled codes portable
amongVLIW processors w ith the various number of functional
units,because the instruction size reflects the number of
functionalunits directly. On the other hand, in SIMP, one
instructioncorresponds to one instruction pipeline, and therefore
the numberof instruction pipelines installed is transparent to its
1SP(Instruct ion-Set Processor) architecture.The maximum throughput
of instruction execution is at mostone instruction block of P
instructions per cycle; i.e., C can bereduced to l/P. Thus, the
ideal program execution time of SIMPprocessors results
in;E=Nx(lIP)XT.3. Critical Issues Regarding SIMP
There are several critical issues to be resolved
beforeimplementing SIMP architecture, which issues are also
commonto most pipelined processors. We identify those issues by
givingsome background regarding instruction-pipelining
techniques.3.1 Branch Problem
The detrimental effects of branch ins tructions are
severe,because fetching the next instruction is postponed until a
branchdecision (i.e., taken or not-taken) is resolved and a branch
targetaddress is generated. As a result, a lot of bubbles are
forced in toa pipeline, and the pipeline stalls. There are some
techniques toreduce the branch penalty: delayed branch, branch
prediction,multiple prefetching, and so on [Lee84]. A popular
technique isbranch prediction. By means of branch prediction,
instructionsfetched from a predicted branch path can be executed in
aconditional mode. If the predicted path is incorrect, however,some
prediction-m iss handling should be done to nuilify or squashthe
conditionally executed instructions.
SIMP processors also can adopt lbranch prediction
withprediction-miss handling. However, branch prediction
involvesother critical issues unique to SIMP;How to determine
predicted paths inside an instruction blockwhich substantially
consists of multiple instructions to befetched simultaneously, and
how to recover if one of the paths isincorrect.3.2 Data
Dependency
There are 3 types of data dependencies: flow (RA W:
Read-After-Write), anti (WAR: Write-After-Read), and output (WAW :
Write-After-Write ). Two popular hardware solutions exist to the
datadependency problem: pipeline interlock logic in
linear-pipelinedprocessors, and instruction issue logic in hlFU
processors.Pipeline interlock logic is so simple and
straightforward that, ifit detects data dependencies , it just
interlocks pipeline until thedependencies are resolved. The
detrimen tal effects of datadependencies, however, can not be
alleviated.Simple instruction issue logic can issue an instruction
to anMFU, only if its data dependencies are resolved; otherwise,
theinstruction and subsequent instructions are blocked from
issuing.Complex issue logic such as Tomasulos algorithm permits
aninstruction to be issued even when its dependencies are
notresolved. Flow dependencies can be resolved by waiting
andmonitoring instruction results, and anti/output dependencies
canbe eliminated by renaming registers with tags. In
addition,Tomasulos algorithm allows subsequent instructions to
bypassthe instruction issued previously, while it waits until
itsdependencies have been resolved. Thus instructions can
beginand/or complete their execution out-of-order with respect to
thecompiled code sequence. This scheme of instruction execution
isreferred to as out-of-order execution model IWeiss84; Patt851,
andcan minim ize the effects of flow dependencies .To utilize
multiple instruction pipelines as well as multiplefunctional units,
S IMP processors also can employ the out-of-orderexecution model.
In such a case, there are critical issues unique toSIMP;How to
detect data dependencies among multiple instructionssimultaneously,
and how to represent them.3.3 Control Dependency
Even if above-mentioned techniques isuch as
conditional-modeexecution and out-of-order execution are employed,
controldependencies still impede the execution of instructions. It
isbecause the domain of out-of-order execution may be affected
bythe size of a basic block (in which only one control
dependencyoccurs at the bottom). There are two schemes of the
out-of-orderexecution model: lazy (or normal) execution and eager
execution.Lazy execution schem e disallows out-of-order execution
toproceed beyond any branch instruction; i.e., the domain of
out-of-order execution is limited to the basic block whose
execution iscertainly needed. Although the scheme is simple, the
effect of out-of-order execution is diminished by small basic
blocks.On the other hand, eager execution scheme causes
instructionsto be executed out-of-order regardless of basic blocks
they belongto. The scheme applies out-of-order execulion to
instructionsfetched from a predicted path, and it therefore
requires moresophisticated prediction-miss handling m echanisms,
such as Lhcreorder buffer of the RUU (Register Update Unit)
lSohi871 and thecheckpoint repair mechanism [Hwu871, in order to
avoid animprecise machine state (described in section 3.4).3.4
imprecise Machine State
When instructions may finish out-of-order, an imprecisemachine
state can be introduced by branches and instruction-generated traps
(e.g., an exception and a page fault). It is because,when a branch
or trap occurs, out-of-order execution can modify amachine state
(such as register file and memory ) inconsistentlywith the
sequential architectura l specification. The problemcaused by traps
is well-known as imprecise interrupt, and thereare many solutions
to the problem [Smith851. Also, there are
a0
-
8/8/2019 1989-Single Instruction Multiple Pipeline
Architecture
4/8
common solutions to both the imprecise interrupt problem and
theproblem caused by branches lHwu87; Sohi871.4. SIMP Processor
Prototype
The SIMP processor prototype, the first implementation ofSIMP,
is a quadruple instruction-p ipeline processor composed of
4identical instruction pipelines. It is an ideal SIMP processor,
inthe sense that it is equipped with rich hardware mechanisms
toresolve the issues discussed in section 3; i.e., branch
prediction,conditional-mode execution, out-of-order execution, and
reorderbuffer. Note that its design never limits o ther
implementations ofSIMP architecture, especially on the number of
instructionpipelines.4.1 Processor Organization
Block diagram of the SIMP processor prototype is shown inFigure
2. Each instruction pipeline comprises 5 stages:
IF(Instruction-block Fetch), D (Decode), I (register-read and
Issue),E (Execute), and R (register-write and Retire). The
prototype willbe implemented in off-the-shelf TTUCMOS chips, with a
machinecycle time of 60 ns, or a pipeline cycle time of 120 ns
(i.e., S-cyclepipeline). Hereafter cycles refer to pipeline cycles,
The SIMPprocessor prototype consists of the following main
components.(a) MBIC (Multiple-Bank Instruct ion Cache):The MBIC is
an instruction cache consisting of 4 independentbanks of RAMS,
where a bank width equals to an instruction size(4 bytes). A cache
line contains 16 contiguous instructions from astatic instruction
stream (i.e.;object program) in memory. TheMBIC also includes a BTB
(Branch Target Buffer) for purpose ofbranch prediction.(b) IBSU
(Instruction-Block Supply Unit):The IBSU is common to all
instruction pipelines, and it plays arole of IF-stage. At each
cycle, the IBSU fetches 4 successiveinstructions from the MBIC with
the help of branch predic tion anddistributes them to all the
IPUs.(c) IPUsUnstruction Pipeline Units):Four identical IPUs are
installed. For an instruction receivedfrom the IBSU, each IPU
performs a pipeline sequence from D-stage to R-stage individually.
E-stage is equipped with 5pipelined functional units: IALU (Integer
ALU), IMUL (IntegerMULtiplier), FALU (Floating-point ALU), FMUL
(Floating-pointMULtiplier), and DCAR (Data Cache Access Requester).
They areconstructed with 32-bit building blocks such as Advanced
MicroDevices Am29 323132 and Weitek WTL2264/65.To allow
out-of-order execution and to ensure the precisemachine state,
E-stage provides a queue of 4 entries, called WRB(Waiting and
Reorder Buffer), which comprises a pair of WB(Waiting Buffer) and
RB (Reorder Buffer). The WB corresponds tothe reserva&n
stations in the IBM 360/91 [Tomasulo671, and theRR corresponds to
the reorder buffer proposed in [SmithBB;Sohi871.(d) DHRF
(Dependency -Handling Register-File):The DIIRF is a register file
with 8 read-ports and 4 write-ports.The DHRF is shared by all the
IPUs, and is accessed three times(i.e., two source-register
accesses at l-stage and one destination-register access at R-stage)
per cycle by every IPU . The DHRFmaintains a WRT (Write Reseruation
Table), each entry of whichis associated with a register, to detect
flow dependencies. It alsomaintains a CDT (Control Dependency
Table) to detect controldependencies. The DHRF provides 4 BBS
(Bypass Buffers), each ofwhich contains a copy of the RB in each
IPU.(e) MPDC (Multiple-Port Data Cache):The MPDC is a data cache
with 4 load-ports and 4 store-ports.The MPDC is shared by all the
IPUs, and is accessed twice (i.e.,one LOAD access at E-stage and
one STORE access at R-stage) percycle by every IPU, if executing a
LOAD/STORE instruction .(f) IPCN (IPU Chaining Network):The IPCN is
an interconnection network among all the WRBs.
16 instructions/cache-linei --I 1static instruction stream t
CACHE-LINE FETCH
supplying instruction-block stream INSTRUCTION-BLOCK SUPPLY(---j
supplying directio; (,/ ,,...A /IPCN I I I I II I III
CPU1 PU2 [PC3
POMPDC
PI I2 I
Figure2. Block Diagram of the SIMP Processor Prototype
It consists of 4 broadcast buses, where every IPU is the bus
masterof the corresponding bus. When one IPU places an
executionresult on its own bus, all the IPUs (including the sender
itself) cancatch the result from the bus. Thus the IPCN works like
thecommon data bus used in the IBM 360/91 [Tomasulo671.4.2 Pipeline
Flow
During IF-stage, the IBSU fetches an instruction block of
4successive instructions from a static instruction stream cached
inthe MBIC, and then supplies it for all the IPUs, one
instructionper IPU. The instruction stream being supplied by the
IBSU iscalled supplying instruction. -block stream. Hereafter,
theinstruction block is a unit of management until it retires from
thesupplying instruction-block stream. At most 7 instruction
blockscan reside in the stream; i.e., l/D-stage, l/l-stage,
4/E-stage, andl/R-stage.Once each IPU takes the corresponding
instruction in aninstruction block, it can accomplishes pipelined
processing for theinstruction individually. All the 4 instructions
in the sameinstruction block, however, should flow through D, I,
and R-stageson a lockstep basis, and in-order with respect to the
instruction -block sequence. Only one slack exists in E-stage,
whereinstructions can wait requisite operands and begin the
execution
81
-
8/8/2019 1989-Single Instruction Multiple Pipeline
Architecture
5/8
when the operands become available. Instruct ions can begin
andcomplete the execution out-of-order with respect to both
theinstruction sequence in the instruction block and the
instruction-block sequence. The out-of-order execution mode1 is
also referredto as local dataflow execution, because instructions
are executedin a dataflow-execution fashion and the scope is
localized in E-stage.A general pipeline flow following IF-stage is
summ arized below.A brief description of out-of-order execution,
which involves I, E,and R-stages, follows in section 6 .(a) D
(Decode) stage:In each IPU, the decoder accepts an instruction from
the IBSUand decodes an operation field of the instruction. It then
forwardsidentifiers of requisite registers (up to 3: 2 sources and
1destination) and an operation type (i.e., BRANCH, or not) of
thedecoded instruction to the DHRF.(b) I (register-read and Issue)
stage:The DHRF receives the register identifiers and the
operationtype from every IPU . The DHRF updates the entries in the
WRT,each of which is indexed by a destination-registe r identifier.
Italso updates the CDT, according to the operation types.The DHRF
then transmits the current contents of sourceregisters, which are
fetched from the register file or bypassed fromBBS, to the IPU
requesting the source operands. It appends somecontrol information
representing flow and control dependenc ies.Each IPU accepts them
and issues the instruction byforwarding them to the tail entry of
the WRB, if the WRB is notfull.(c) E (Execute) stage:At each
machine cycle, every instruction in the WRB is checkedto see if it
can be executed. If an instruction has no probableflow dependency
(which is defined in section 5.3), then the IPU can#ire the
instruction by dispatch ing it to one of functional
units.Otherwise, the instruction must wait in the WRB until
itsprobable flow dependencies have been resolved. An instructioncan
resolve its dependencies by monitoring the IPCN. When thefiring
instruction completes its execution, the result is stored inthe
WRB.At the same time, if no control dependency exists to
theinstruction which has completed its execution, the IPU cancommit
the instruction by broadcasting the execution result toall the IPUs
via the IPCN. Otherwise, the instruction must waitin the WRB until
its control dependencies have been resolved.(d) R (register-write
and Retire) stage:Each IPU forwards a committed result, if any,
from the WRB tothe associated BB in the DHRF. The DHRF updates the
WRT andCDT, according to the committed results. For the
instructionblock at the head of the WRBs, if al1 4 instructions are
committed,then the instruction block can be retired from the IPUs.
Theretirement has the DHRF update the destination registers withthe
contents of the head entries of the BBS.4.3 Balanced Instruction
Set Computer
The SIMP architecture itself is not an ISP architecture but
avehicle useful for implementing several different target
ISParchitectures . We believe, however, that there is a class of
ISPSmost suitable for SIMP in a wide spectrum of ISPs from RISC
toCISC. We refer to it as EISC (Balanced Instruction SetComputer),
and apply it to the SIMP processor prototype. Inorder to utilize
strengths of SIMP, we place the followingconstraints on the BISC
architecture;(1) Single-sized instructions: Single-sized
instructions allowfetching and decoding multiple instructions
simultaneously.(2) LOAD/STORE architecture: Register-register
operationsrelieve some of the burden to detect and resolve
datadependencies.(3) Fixed-cycle ope rations: Unlike RISCs emphas
izing single-cycle operations, operations need not be completed in
onecycle, but in some fixed cycles. If E-stage is pipelined by
means of multiple arithmetic pipelines, it is no longernecessary
to limit all instructions to single-cycle operations.Also. from a
viewpoint of code schedu ling, it is suflicient to fixthe number of
operation cycles for every instruction. ThusBISC can include some
complex instructions requiring fixedmultiple cycles, such as
integer MULTIPLY/DIVIDE andfloating-point instructions, which are
usually excluded fromRISCs. However, the other complex
instructions, whoseoperations spend the variable number of cycles,
are stillexcluded from BISC.(4) Balanced execution time: Though the
fixed-cycle operationscan loosen RISCs constraint of single-cycle
operations, theunbalance of execution time of every instruction
introducesproblems of large pipeline latency and low
pipelinethroughput. The pipeline stall due to the unbalance is
severein SIMP, because all instructions in an instruction block
hadbetter flow th rough pipelines on a lockstep basis so as to
avoidthe imprecise machine state problem. It means that
aninstruction with the longest execution time in an
instructionblock determines the pipeline elapsed time for the
instruct ionblock. Therefore the execution time. especially the
number ofoperation cycles in E-stage, of every instruct ion should
bebalanced within limits.The ISP architecture for the SIMP
processor prototype is arepresentative of BISC; i.e., 32-bit
single-sized instruct ions,LOAD/STORE architecture,
register-registe r operations specifiedby 3-operand formats, and
balanced fixed-cycle operations ranging
from 2 to 6 machine-cycles in E-stage. From a standpoint of
thebalanced execution t ime, DIVIDE instructions (which
wouldrequire over 13 machine-cycles ) are not provided, but
MULTIPLYinstructions, for both integer and floating-point (which
require 2and 6 machine-cycles respectively), are provided.6
Resolution Algorithms
To resolve the critical issues discussed in section 3, we
havealready developed algorithms for branch problem resolution,
datadependency resolution [Kuga89l, control dependency
resolution,and so on. Details of all the algorithms cannot be
presented heredue to insufficient space, however, and they will be
reportedelsewhere. We describe the outline of these algorithms
below.6.1 Branch Problem Resolution
During IF (Instruction-block Fetch) stage, the
IBSU(Instruction-Block Supply Unit) supplie:a an instruction block
of 4successive instructions. Because of the presence of
branchinstructions, the supplying instruction-block stream is
somewhatdifferent from a dynamic instruction stream, which is a
sequentialexecution order of instructions in a static instruction
stream. Thesupplying instruction-block stream has the
followingcharacteristics;(1)
(2)
To fetch and distribute 4 instructions simultaneously, theIBSU
simply makes an instruction block of 4 successiveinstructions in
the static instruction stream. Thus theinstruction block may
include some instructions not to beexecuted (i.e., to be excluded
from the dynamic instructionstream).The instruction block to be
prefetched is determined with thehelp of branch prediction using a
BTB (Branch Target Buffer).Thus the supplying instruction-block
stream may containsome instruction blocks fetched from incorrectly
predictedbranch paths.Conventional prediction-miss handling
techniques nullify all_ . . _ - . . .the instructions executed in a
conditional mode (i.e., llush thepipeline), if (and only if) a
branch prediction is wrong. Such apipeline flushing scheme is,
however, inadequate to the supplyinginstruction-b lock stream
because of the following reasons;(1) Even if a prediction is
accurate, some instructions must benullified due to the
above-mentioned characteristics 1.(2) Although a prediction is
wrong, it is not efficient to flush thepipeline regardless of
whether or not the instruction to berefetched already exists in the
pipeline. The inefficiency is
62
-
8/8/2019 1989-Single Instruction Multiple Pipeline
Architecture
6/8
more severe in the SIMP processor prototype, because as manyas
23 instructions can be executed in a conditional mode.Hence,
instead of the pipeline flushing scheme, we haveintroduced the
selective instruction-squashing scheme, whichsquashes only the
instructions to be excluded from the dynamicinstruction stream
whenever a branch decision is resolved[Murakami88]. The selective
instruction-squashing schemeresults in allowing the instructions
fetched from multiple branchpaths to be execute in multiple
conditional modes.The selective instruction-squashing scheme forces
the IBSU toselect instructions to be squashed. For that purpose,
the IBSUmaintains a queue, called IBAT (Instruction-Block
AddressTable), each of whose entries is associated with-an instruct
ionblock under pipelined execution. There are the following
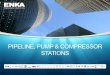
4patterns of squashing instructions selectively, as shown in
Figure3;(1) Predict-Not-taken/Not-taken (Figure 3-a): When a
predictionis Not-taken and found to be accurate, no squashing
occurs.Predict-Taken/Taken (Figure 3-b) and Predict-Not-taken/Taken
(Figure 3-c): When a branch is taken, the IBATis associatively
searched to see if the branch target instructionhas already been
supplied. If the target is present, all theinstructions between the
branch and the target must besquashed. In such a case, it is not
necessary to refetch thetarget; otherwise, the pipeline must be
flushed and the targetrefetched.
(2)
(3) Predict-Taken/Not-taken (Figure 3-d): When a prediction
isTaken and found to be wrong, the IBAT is associativelysearched to
see if the sequential target instruct ion, which isincidentally
fetched from the sequential stream, has alreadybeen supplied. The
succeeding process is the same as thatstated above.5.2 Data
Dependency Resolution
Our data-dependency resolution algorithm is an extension
toTomasulos algorithm [TomasuloBIJ. We describe the outline ofour
algorithm by comparing it with original Tvmasulos algorithmand the
other extensions.(a) Flow Dependency Detection and Representat
ion:(1) Tomasulos algorithm: Instructions are sequentially
issuedone by one. Each register is assigned a busy bit
whichindicates if it is the destination register of an instruction
in
execution. Each register is also assigned a tag whichidentifies
the instruction that must write the result into theregister. When
an instruction is issued, the source registersare checked to see if
they are busy. An instruction whosesource registers are busy
obtains tags for the busy sourceregisters.(2) Our algorithm: We
adopt a bitmap scheme, called multiple-dependency representation
scheme, rather than Tomasulvstag scheme, because the tagging
substantially needs to becarried out in sequential. Four
instructions are issuedsimultaneously. Each register is assigned an
entry of theWRT (Write Reservation Table), which entry is a bitmap
andidentifies all the instructions that mus t write the results
intothe register. When an instruction is issued, it always
obtainsthe bitmaps for its source registers. Thus every instruct
ion iscapable of recognizing its multiple flow dependencies
causedby up to 3 preceding instructions in the same instruction
blockand by up to 3 preceding instruction blocks (Le., up to
15dependencies per source-register). It is another reason for
thebitmap scheme, and detailed in section 5.3.
(b) Flow Dependency Resolution:(1) Tomasulos algorithm: An
instruction whose source registersare busy is forwarded to a
reservation station (RS). Theinstruction must wait in the RS until
its flow dependencieshave been resolved. It can resolve its
dependencies bymonitoring the common data bus (CDB) and by
performing the
supplying directionBlock [n] Block [ntl] Block [n+Z]
prediction : Not.takenresolution : Not-taken(a)
Predict-Not-Taken/Not-Taken
Block [n] Block [n+l] Block [n+2] SupplyingInstruction-Block
Stream
prediction : Takenresolution : Taken(b) Predict-Taken/Taken
Block [n] Block [n+l] Block En+21-.---.
SupplyingInstruction-
) Block Stream
t prediction : Not-takenresolution : Taken(c)
Predict-Not-Taken/Taken
Block [n] Block [n+lI Block h+21\FT:;,:Fr\ ;;F;iirn
p . ._........prediction . Takenresolution : Not-taken
(d) Predict-Taken/Not-Takenq : Instructions to be SquashedB :
Branch Instruction 0 : Dynamic Instruction StreamBT : Branch Target
InstructionP : Predicted Point ST : Sequential Target
Instruction
Figure 3. Selective Instruction-Squashing Scheme
tag-matching process. If a matching tag is found, the data onthe
CDB is the requisite source operand.(2) Our algorithm: Every
instruction is forwarded to the tailentry of the WRB (Waiting and
Reorder Buffer) in thecorresponding IPU (Instruction Pipeline
Unit). The WB(Waiting Buffer) part of the WRB corresponds to
reservationstations. If an instruction has any probable flow
dependcnc!(which is defined in section 5.3). then it must wait in
the WRBuntil its probable flow dependencies have been resolved.
Flowdependencies can be resolved by monitor ing the IPCN
(IPUChaining Network) and by clearing bits in bitmapsrepresenting
dependencies. No tag-matching logic is needed.If a bit associated
with a probable flow dependency is cleared,the data on the IPCN is
the requisite source operand .
(c) Anti/Output Dependency Resolution:(1) Tomasulo s algorithm:
If the destination register is busy otissuing an instruction, the
instruction renames its destinationregister by updating the tag of
the destination register with anew tag. Every register as well as
the RS monitors the CDB,and updates its contents and clears its
busy bit if a matchingtag is found. The direct register renaming
scheme introducesimprecise interrupts, because the instruction that
completesits execution is allowed to write the result into the
destination
83
-
8/8/2019 1989-Single Instruction Multiple Pipeline
Architecture
7/8
register directly if a tag match occu rs, In other words,
theresult disappears if no tag match occurs.(2) Pa tts and Sohis
algorithms: The registers are not renameddirectly, but done
indirectly through a buffer such as theresult buffer [PattSB l or
the reorder buffer of the RUU(Register Update Unit) [Sohi87]. That
is, an instruction resultis not written into the destination
register straightforward,but stored in the buffer temporarily. The
indirect registerrenaming scheme allows recovery from wrong
branchpredictions and traps, and therefore implem ents
preciseinterrupts.(3) Our algorithm: Basically the same as Patts
and Sohisalgorithms. The scheme of interest to us is the RUU,
whichacts as a queue and merges the RSs with the reorder
buffer[SohiSIl. The WRB (Waiting and Reorder Buffer) in
ouralgorithm corresponds to the RUU. Unlike the RUU, aseparate WRB
is located in every IPU and a set of all theWRBs acts as a
queue.
5.3 Control Dependency ResolutionAs stated briefly in section
3.3, there have been two hardwaresolutions of the basic block prob
lem caused by controldependencies: lazy execution and eager
execution. In addition tothe eager execution scheme , we attempt a
more eager executionscheme, called aduance execution scheme.
(a) Lazy Execution:When a branch instruction is present,
subsequent instructionsare blocked from firing (or dispatch ing)
their executions until thecontrol dependency due to the branch has
been resolved[TomasuloBIl.
(b) Eager Execution:In the above case, subsequent instructions
are allowed to iiretheir executions as soon as their flow dependenc
ies are resolved,even before the control dependency has not been
resolved. Thescheme does not commit the instructions (i.e., update
the machinestate) until the control dependencies have been resolved
[Sohi871 .(c)Advance Execution:To take advantage of multiple
conditional modes derived fromthe selective instruction -squashing
scheme , the advanceexecution scheme allows an instruction to fire
its execution (calledpre-execution) even before its flow
dependencies have not beendefinitely resolved because of the
presence of controldependencies. It also allows the instruction to
re-execute (orbacktrack) when the pre-execution result is found
invalid.We first introduce two types into flow dependencies:
PFD(Probable Flow Dependency) and UFD (Uncertain FlowDependency).
As shown in Figure 4, a PFD occurs when theinstruction A is going
to write to the register Rn from which theinstruction D is going to
read, and when no control dependencycovers A. On the other hand, a
UFD occurs when the instructionC is going to write to Rn and some
control dependencies covers C.From the viewpoint of the instruction
D, at most 1 PFD and morethan 1 UFD may be present per source
operand at a time. Toidentify all the PFD and UFDs, we employ the
multiple-dependency representation scheme mentioned in 5.2.For this
example, Tomasulos tag scheme represents that D isflow-dependent on
C, with a single tag to identify C which willsupply D with the
latest version of Rn. However, whether C isexecuted or not depends
on the conditional branch ins truction B.If the branch is taken and
the branch target falls between C andD, then C is never executed,
and therefore the tag identifying Chas no meaning. The instruction
D should access the correctversion of Rn, which was generated by A
and may be alreadywritten into the register file. In such a case,
conventional pipelineflushing schemes recover from the incorrect
sequence bysquashing all the instructions following B, and by
refetchinginstructions starting from the branch target. Then the
instructionD is refetched, and now can obtain the correct version
of Rn fromthe register file.
Since the selective instruction -squashing scheme need
notrefetch the instruction D, however, D cannot obtain the
correctsource operand with the tag. The tag scheme is inadequate to
theselective instruction-squashing scheme .consequen tly.
Themultiple-dependency representation schleme has just resultedfrom
the selective instruction -squashing scheme.Now an instruction can
fire its pre-execution as soon as itsPFDs are resolved, regardless
of whether or not its controldependencies have been resolved.
Resolution of its controldependencies may uncover any new PFD
(which was one ofUFDs), even after the instruction complel;ed its
pre-execution. Insuch a case, the instruction must backtrack and
wait in a WRBuntil its PFDs have been resolved again. There is no
limit to thenumber of the backtrack. The WRB commits the
instruction whenits PFDs and control dependencies have been
resolved. Thecommitted result is then forwarded, via the IPCN, to
all theinstructions waiting for it.
Rn &Ri op S2...
. A
Conditional Branch . B
PFD Rn+Rk op S2
. C
. D
PFD : Probable Flow Dependency issuingdirectionUFD : Uncertain
Flow DependencyFigure 4. Probable and Uncertain Flow
Dependencies
6. ConclusionsIn this paper, we have introduced a novel multiple
instruction-pipeline parallel architecture: SIMP. Our goal is to
enhance theperformance of SlSD processors drastically by exploiting
bothtemporal and spatial parallelisms, and to keep
programcompatibility as well. Key techniques to achieving
highperformance are the mechanisms of fetching multiple
instructionssimultaneous ly and continuously, and of resolving
instructiondependencies effectively at run time. We have devised
thesemechanisms for the SIMP processor prototype which is a
quadruple instruction-pipe line processor under development .The
dependency resolution mechanism pe rmits out-of-orderexecution of
sequential instruction stream. Our out-of-orderexecution model is
based on Tomasulos algorithm, but is greatlyextended and
accommodated to multiple instruction pipelining.The instruction
fetch mechanism cooperates with the out-of-orderexecution model by
supplying it with multiple instructionscontinuously with the help
of branch prediction. In this paper, wehave introduced several
unique schemes such as selectiveinstruction squashing, multiple
conditional modes, multiple-dependency representation, advance
execution, and so on.
84
-
8/8/2019 1989-Single Instruction Multiple Pipeline
Architecture
8/8
Although SIMP does not limit the target ISP architectures,
wehave suggested a class of ISP architectures most suitable
forSIMP: BISC. BISC is a LOAD/STORE architecture with single-sized
instructions, but it loosens RISC% constraint of
single-cycleoperations. We appiy BISC lo the SIMP processor
prototype.Currently we have several projects in progress regarding
SIMP;the developmen t of the SlMP processor prototype, the design
of anoptimiz ing C compiler capable of static code schedu ling for
theprototype, and the evaluation of SIMP architecture via
softwaresimulations.Since we have not yet completed a software
simulator of theSIMP processor prototype , we cannot report the
performanceestimate for the prototype here. T he measurements
obtained by asimple trace-driven simulator (see Table 1). however,
show that aquadruple instruction-pipeline processor can achieve
aperformance of about 200 -27096 of a single
instruction-pipelineprocessor IIrie881.
Table 1. Relative Speedupsover Single Instruc tion Pipeline
We wouId like to emphasize that the results are verypreliminary
and the benchmarks are not optimized by static codescheduling. The
results therefore encourage us to expect moreperformance
enhancement in the SIMP processor prototype.As our future work, we
are planning a VLSI implementation ofSIMP architecture. It will be
done by implementing one or moreinstruction pipelines on a
single-chip VLSI, and by constructingan SIMP processor using the
chips as building blocks. We refer tothe single-chip VLSI as
pipeline-slice microprocessor on theanalogy of bit-slice
microprocessor. The processor organizationusing pipeline-slice
microprocesso rs will support scalabilitytoward more instruction
pipelines. As bit-slice microprocesso rscan achieve a wide range of
data width, pipeline-slicemicroprocesso rs will be able to achieve
a wide range ofperformance.We believe that SlMP architecture is one
of the most promisingarchitectures toward the coming generation of
high-speed singleprocessors.AcknowledgementsWe would like to thank
the following students who havecontributed or are now contributing
to the project: T.Goto(currently with Toshiba Corp.), O.-B.Gwun,
T.Hara, andTHironaka. We would also like to acknowledge the
considerablecontributions from A. Fukuda and
TSueyoshi.References[Acosta861 R.D.Acosta, J.Kjelstrup, and
H.C.Torng, An lnstruc-tion Issuing Approach to Enhancing
Performance in MultipleFunctional Unit Processors, IEEE Trans.
Cornput., vol.C-36,
no.9, pp.815-828, Sept. 1986.[CoIweIl87] R.P.ColwelI, R.P.Nix,
J.J.ODonnell, D.B.Papworth,and P.K.Rodman, A VLIW Architecture for
a TraceScheduling Compiler, Proc. 2nd Znt. Conf.
ArchifecturalSupport for Programming Languages and Operating
SystemsfASPLOS If), pp.180-192, Oct. 1987.[Fisher81 ] J.A.Fisher,
Trace Scheduling: A Technique for GlobalMicrocode Compaction, IEEE
Trans. Com put., vol. C-30, no.7,pp.478-490, July 1981.[Fisher831
J.A.Fisher, Very Long Instruction Word Architecturesand the
ELI-512, Proc. 10th Ann. Int. Symp. ComputerArchitecture,
pp.140-150, June 1983.
LHagiwara801 H.Hagiwara, STomita, S.Oyanagi, andK.Shibayama, A
Dynamically Microprogrammable Computerwith Low-Level Parallelism,
IEEE Trans. Comput., vol.C-29,no.7, pp.577-695, July 1980.lHwu871
W.W.Hwu and Y.N.Patt, Checkpoint Repair for Out-of-order Execution
Machines, Proc. 14th Artn. Int. Symp.Computer Architecture,
pp.18-26, June 1987; also IEEE Trans.Cornput.. vol.C-36, no.12,
pp.1496.1514, Dec. 1987.lIrie881 N.Irie, M.Kuga, K.Murakami, and
S.Tomita, SpeedupMechanisms and Performance Estimate for the SIMP
ProcessorPrototype (in Japanese), ZPSJ WGARC report 73-11,
Nov.1988.[Kuga89] M.Kuga, K.Murakami, and STomita, Low-level
Paral-lel Processing Algorithms for the SIMP Processor Prototype
(inJapanese), Proc. IPSJ Joint Symp. Parallel
Processing89,pp.163-170, Feb. 1989.[Lam881 M.Lam, Software
Pipelining: An Effective SchedulingTechnique for VLIW Machines,
Proc. SIGPLAN88 Conf.Programming Language Design and ImpZemcntation
, pp.318-328, June 1988.[Lee841 J.K.F.Lee and A.J.Smith, Branch
Prediction Strategiesand Branch Target Buffer Design, IEE E
Computer, ~01.17,no.1, pp.6-22, Jan.
1984.[Murakami881K.Murakami,A.Fukuda, T.Sueyoshi, and
STomita,SIMP:Single Instruction stream/Multiple
instructionPipelining (in Japanese), IPSJ WG ARC report 69-4, Jan.
1988.
[Patt851 Y.N.Patt, W-M.Hwu, and M.Shebanow,HPS, A
NewMicroarchitecture : Rationale and Introduc tion, Proc. 18thAnn.
Workshop on Microprogramming, pp.103-108, Dec. 1985.[Pleszkun881
A.R.Pleszkun and G.S.Sohi, The PerformancePotential of Multiple
Functiona l Unit Processors, Proc. 15thAnn. lnt. Symp. Computer A
rchitecture, pp.37-44, May 1988.[Rau89JB.R.Rau,D.W.L.Yen,
W.YenandR.A.Towle,TheCydra5 Departmental Supercomputer, ZEEE
Computer, ~01.22, no.J,Jan. 1989.[Smith851 J.E.Smith and
A.R.Pleszkun, Implementation ofPrecise Interrupts in Pipelined
Processors, Proc. 12th Ann. Int.Symp. Computer A rchitecture,
pp.36-44, June 1985; also IEEETrans. Cornput., vol.C-37, no.5,
pp.562-573, May 1988.[Sohi87] GSSohi and S.Vajapeyam, Instruction
Issue Logic forHigh-Performance, Interruptable Pipelined
Processors, Proc.14th Ann. Int. Symp. Computer Architecture,
pp.27-34, June1987.[TjadenlO] GSTjaden and M.J.Flynn, Detection and
ParallelExecution of independent instructions, IEEE Trans.
Cornput.,vol.C-19,no.l0, pp.889-895, Oct. 1970.[Tomasulo67] R
.M.Tomasulo, An Efficient Algorithm forExploiting Multiple
Arithmetic Units. IBM J. Res. Develop.,vol.ll,pp.25-33, Jan.
1967.[Tomita83] S.Tomita, KShibayama, T.Kitamura, T.Nakata,
andH.Hagiwara, A User-Microprogrammable, Local HostComputer with
Low-Level Parallelism, Proc. 10th Ann. Int.Symp. Computer
Architecture, pp.151-157, June 1983.[Tomita86] STomita,
K.Shibayama, T.Nakata, S.Yuasa, andH.Hagiwara, A Computer with
Low-Level Parallelism QA-2 -Its Applications to 3-D Graphics and
Prolog/Lisp Machines -,Proc. 13th Ann. Int. Symp. Computer
Architecture, pp.280-289,June 1986.[Weiss841 SWeiss and J.E.Smith,
Instruction Issue Logic forPipelined Supercomputers, Proc. 11th
Ann. Znt. Symp.Computer Architecture, pp.llO-118, June 1984; also
IEEETrans. Comput., vol.C-33, no.ll.pp.1013-1022, Nov. 1984.