-
8/9/2019 1997 - A Comparison of Semi-Active Control Strategies
for the MR Damper
1/5
A Comparison of Semi-Active Control Strategies for the MR
Damper
S.J. Dyke' and
B.F.
Spencer Jr.
'Dept.
of
Civil Engineering, Washington Univ., St.
Louis, M O
63130,
U.S.A.
2Dept. of Civil Enginee ring and Ge ol. Sci., Univ. of Notre
Dame, Notre Dame, IN 46556,
U.S.A.
Abstract
Because the behavior
of
semi-active de vices is often highly
nonlineal; one of the ma in challenges in the application of
this technology is the development of appropriate control
algorilhms. Herein, a number of recently proposed semi-
active control ulgorithms are evaluated for use wit?i the
magrietorheological M R ) damper; an innovative semi-ac-
tive control device th at appears to be particularly prom
is-
ing fo r civil engineering app lications. T he perj5ormance
of
the resulting control systems are compared through simu-
lation, and the advantages
of
each algorithm are dis-
cussed. The results demonstrate that the pelformanee of
the control system is highly depend ent on the choice of al-
gori thm employed.
1: Introduction
The magnetorheological (MR) damper is a semi-ac-
tive control device that is capable of generating the magni-
tude of forces necessary for full-scale applications, while
requiring only
a
battery for power [2,
3, 211.
Additionally,
this device is offers highly reliable operation at
a
modest
cost and its performance is relatively insensitive to
temper-
ature fluctuations or impurities in the fluid. However, be-
cause of the inherent nonlinear nature of these devices,
one of the challenging aspects of utilizing this technology
to achieve high levels of performance is in the develop-
ment of appropriate control algorithm that can take advan-
tage of the unique characteristics of the device.
A variety of semi-active devices and control algo-
rithms have been proposed for seismic control
[7-14,
201.
Because the characteristics of the various semi-active de-
vices are different (e.g., variable friction,
fluid-orificing,
controllable fluids, etc.) , a control algorithm that
performs
well for one device
may
not be suitable for use with anoth-
er device. The focus of this paper is to investigate a num-
ber of recently proposed control strategies for use with the
MR dampcr. In simulation,
one
cxample
is
considered in
which these methods are applied to control a three-story
structure using an MR damper. To assess the effectiveness
of each of the control algorithms, they will be evaluated in
their ability to reduce the peak responses
for
the
N-S
com-
ponent of the El Centro earthquake excitation. The con-
trolled responses are compared to the uncontrolled and
passive responses.
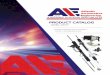
2: Mechanical Model
of
the MR Damper
To
evaluate the potential of MR dampers in structural
control applications, the simple mechanical model depict-
ed in Fig.
1
was developed and shown to accurately predict
the behavior
of
an MR damper over a broad range of in-
puts [17, 181. The model is based on the response of a pro-
totype MR damper, obtained for evaluation from the Lord
Corporation. The equations governing the force
f
predict-
ed by this model are
(3)
where
z
is an evolutionary variable that accounts for the
history dependence of the response. The model parameters
depend on the voltage v to the current driver as follows
a a , + a b u , c1 = C l a + C l b U y O =
C O a + C O b U 4)
where U is given as the output of the first-order filter
li = q ( u - v ) . ( 5 )
Eq.
(5)
is necessary to model the dynamics involved in
reaching rheological equilibrium and in driving the elec-
tromagnet in the MR damper [17, 181.
3:
Control Algorithms
Consider
a
seismically excited structure controlled
with a single MR damper. Assuming that the forces pro-
vided by the MR damper are adequate to keep the re-
sponse of the primary structure from exiting the linear
region, then the equations of motion can be written as
M,X
C,X K,x = Af
-
M,rZg
6 )
where x is
a
vector of the relative displacements of the
floors of the structure,
x
is
a
one-dimensional ground
ac-
celeration, f is the measured control force, defined by
Eqs.
(1-.5), r is a column vector of ones, and A is a vector de-
0 8186 8218 3/97
10.00
997
IEEE
580
-
8/9/2019 1997 - A Comparison of Semi-Active Control Strategies
for the MR Damper
2/5
Figure
1
Simple Mechanical R Damper Model
termined by the position of the
MR
damper in the struc-
ture. This equation can be written in state-space form as
Z
= A z + B f + E f 7)
y
=
C z + D f + v (8)
g
where z is the state vector,
y
is the vector of measured
outputs, and
v
is the measurement noise vector. For these
applications, the measurements typically available for con-
trol force determination include the absolute acceleration
of selected points on the structure, the displacement of the
control device, and a measurement of the control force.
A variety of approaches have been proposed in the lit-
erature for the control of semi-active devices. Subsequent-
ly, a selection of these approaches will be presented and
evaluated for a numerical example. In developing the con-
trol laws, note that i) the control voltage is restricted to
the
range
v
E
[0,
V,,,] , and ii) for a fixed set of states, the
magnitude of the applied force
I f
increases when
v
in-
creases, and decreases when v decreases.
3.1:
Control Based on Lyapunov Stability Theory
In some cases it is possible to employ Lyapunov's di-
rect approach to stability analysis in the design of a feed-
back controller [l]. The approach requires the use of a
Lyapunov function, denoted V z) , which must be a posi-
tive definite function of the states of the system, z . Ac-
cording to Lyapunov stability theory, if the rate of change
of the Lyapunov function,
V z)
, s negative semi-definite,
the origin is stable i.s.L. (in the sense of Lyapunov).
Thus,
in determining the control law, the goal is to choose a con-
trol input which will result in making
V
as negative as
possible. An infinite number of Lyapunov functions may
be chosen, which may result in a variety of control laws.
Leitmann
[141
applied Lyapunov's direct approach for
the design of a semi-active controller. In this approach, a
Lyapunov function is chosen of the form
(9)
1 2
V ( Z > =
~ I l Z l l P
where I
IzI p
is the P-norm of the states defined by
(10)
1 2
llzllp
=
[Z PZI
and P is a real, symmetric, positive definite matrix. In the
case of a linear system, to ensure
V
is negative definite,
the matrix P is found using the Lyapunov equation
A P + P A =
Qp (1
1)
for a positive definite matrix
Q p .
The derivative of the
Lyapunov function for a solution of Eq. (7)
is
V
= - z Q,z z PBf z PEXg .
(12)
Thus, the control law which will minimize V is
v
= V,,,H(-z PBf),
(13)
where H (
.)
is the Heavisicle step function. Notice that this
algorithm is classified as a bang-bang controller, and is
de-
pendent on the sign of the measured control force and the
states of the system. To implement this algorithm, a Kal-
man filter is used to estimate the states based on the
avail-
able measurements
i .e . ,
:MR damper displacement and
structural accelerations). Thus, in this algorithm, better
performance is expected when measurements of the re-
sponses of the full structure are used.
3.2:
Decentralized Bang-Bang Control
McClamroch and Gavin [161 used a similar approach
to develop the decentralized bang-bang control law. In this
approach, the Lyapunov function was chosen to represent
the total vibratory energy in the structure (kinetic plus
po-
tential energy), as in
(14)
Using Eq.
(6) ,
he rate of change of the Lyapunov function
is then
V
=
;x K,x
: X
i
x,) M,(x +
rx,
V =
ix K,X
+ ( X
rig) (-,X -K,x Af) .
(15)
In this expression, the only way to directly effect V is
through the last term. To achieve the goal of making V a
large and negative (maximizing the rate at which energy is
dissipated), the following control law is chosen
(16)
Note that, because the only non-zero terms in the
A
vector
are those corresponding to the location of the MR damper,
this control law requires only measurements of the floor
velocities and applied forces. When the damper is located
in the upper floors, the relative velocity is needed.
Interest-
ingly, when a semi-active device is located between the
ground and first floor, the absolute velocity of the first
floor is required, which is not readily available.
Therefore,
to implement this control algorithm, one would approxi-
mate the absolute velocity (obtain the pseudo velocity) by
integrating the absolute acceleration, as in [191.
v
= V m a x H - X
T i J A f ) .
581
-
8/9/2019 1997 - A Comparison of Semi-Active Control Strategies
for the MR Damper
3/5
3.3:
Clipped-Optimal Control
One algorithm that has been shown to be effective for
use with the MR damper is the clipped-optimal control ap-
proach, proposed by Dyke, et al. [7-91. The clipped-opti-
mal control approach is to design a linear optimal
controller K,( s) that calculates a desired control force
f
based on the measured structural responses y
and the
measured force f applied to the structure, i.e.,
f = L-l{ K , O L { }}
where L . } is the Laplace transform. Because the force
generated in the MR damper is dependent on the responses
of the structural system, the desired optimal control force
f cannot always be produced by the MR damper. Only
the control voltage v can be directly controlled. Thus, a
force feedback loop is incorporated to induce the MR
damper to generate approximately the desired optimal
control force
f , .
To this end, the command signal
v
is se-
lected according to the control law
v =
V , , x H ( { f , - f l f ) .
(18)
Although a variety of approaches may be used to design
the optimal controller, H , LQG methods are advocated
because of their successful application in previous studies
[5-111. The approach to optimal control design is dis-
cussed further in [8 ,9] .
3.4:
Modulated Homogeneous Friction
Another semi-active control algorithm was proposed
for use with a variable friction damper [13]. In this ap-
proach, at every occurrence of a local extrema in the defor-
mation of the device
(i.e.,
when the relative velocity
between the ends of the semi-active device is zero), the
normal force applied at the frictional interface is updated
to a new value. At each local minima or maxima in the de-
formation, the normal force,
N
is chosen to be propor-
tional to the absolute value of the deformation
of
the semi-
active device. The control law is written [131
N t )
=
glP[A(t)ll (19)
where g is a positive gain, and the operator P [ a]
(referred
to as the prior-local-peak operator) is defined as
P[A(t)] = A t - s ) , where
s =
{min
x>O:A(t-x)=O},
(20)
defining
A ( t - )
as the most recent local extrema in the
deformation.
Because this algorithm was developed for use with a
variable friction device, the following modifications were
necessary to apply it to the MR damper: i) there is no need
to check if the force is greater than p N where
p
is the
coefficient of friction, because the MR damper is not sub-
ject to static friction, and ii) a force feedback loop was
used to induce the MR damper to produce approximately
the frictional force corresponding to the desired normal
force. Thus, the goal is to generate a desired control force
with a magnitude
where the proportionality constant
g,
has units of stiff-
ness. The resulting control law is
An appropriate choice
of
g will keep the force f ithin
the operating envelope of the MR damper a majority of the
time, allowing the MR damper force to closely approxi-
mate the desired force. Additionally, notice that this con-
trol law requires only measurements of applied force and
the relative displacements of the control device.
4: Numerical Example
The performance of the control algorithms presented
previously are now evaluated in one example through nu-
merical simulation. A model of a three-story building con-
figured with a single MR damper is considered. The MR
damper is rigidly connected between the ground and the
first floor, as shown in Fig. 2.The governing equations ca
be written in the form of Eq. (6) by defining
98.3
0
175 -50 0 N. ec
Ms = 0 98.3 0
k g ,
Cs = -50 100 -50
I
0 1 0
-50
5112.0 -6.84 0
N
0 -6.84 6.84
I:],
3
, =
10
-6.84 13.7 -6.84 ;
A
= 0 r = 1 .
This system is a simple model of the scaled, three-story,
test structure, described in [6, 91 which has been used in
previous active control studies at the Structural Dynamics
and Control / Earthquake Engineering Laboratory at the
University of Notre Dame. Because the MR damper is at-
tached between the first floor and the ground, its displace-
ment is equal to the first floor relative displacement,
i.e.,
x
=
x1
in Eqs. (1-3).
In this example, the structural measurements available
for calculating the control action include the absolute ac-
celerations of the structure, and the MR damper displace-
ment i .e . , y =
[ f a l xa2 jin3 x,]).
Thus, the governing
equations can be written in the form of Eqs. (7-8) by de-
fining
582
-
8/9/2019 1997 - A Comparison of Semi-Active Control Strategies
for the MR Damper
4/5
A = [
M,0
, -M, 1,C,
, B = [ MI
A , E = - /
r r
The MR damper parameters used in this study are
c O ,
= 8 Nseckm, C o b
=
6 Nsec/cmN, k ,
=
50 Nkm,
c l a =
290
Nseckm, C l b
=
5 NseclcmN, k , = 12 Nkm,
xo =
0
cm, a = 100, b = 450 v', y = 363 cm-2, = 363 cm-
', A = 301,
n
= 2 ,
q
= 190 sec-'. These parameters were
identified based on the prototype MR damper tested at the
University of Notre Dame
[9,
lo].
In simulation, the model of the structure is subjected
to the NS component of the 1940 El Centro earthquake.
The simulations were performed in MATLAB [15]. Be-
cause the system under consideration is a scaled model,
the earthquake was reproduced at five times the recorded
rate. The maximum structural responses of each system
are presented in Table 1. Here, xi is the displacement of
the i th floor relative to the ground, d j is the interstory
drift (i.e.,
x i
i ,
.fa
is the absolute acceleration of the
th floor, and f is the applied control force.
As
a
basis for comparison, two cases are considered in
which the MR damper is employed in
a
passive mode. In
the first case, designated
pussive-off,
the command voltage
to the MR damper is held at 0 V. The second passive case
the voltage to the MR damper is held at the maximum
voltage level (2.25 V) and is denoted as passive-on. From
the results, both passive systems are able to achieve
a
rea-
sonable level
of
performance. However, notice that the
passive-on system results in larger maximum accelerations
and interstory displacements than the passive-off system.
Apparently, choosing a passive device that produces the
largest damping forces may not be the most effective ap-
proach to protective system design.
A variety of
Q p
matrices were tested for the
Lyapunov-based controlle:r, and the best results were
achieved when the
Qp
matrix was chosen
as a
6 x 6 ma-
trix, with nonzero values only in the (l,l), (2,2), and
(3,3)
positions. While using a lower control force, this control-
ler reduces the peak interstory displaccment and peak ab-
solute accclcration by an additional 6.9 and
19 ,
respectively, over the best passive case.
In this example, the decentralized bang-bang control-
ler appears to be quite effective at reducing the maximum
acceleration (33 below the better passive case). Howev-
er, this controller was not effective at reducing the
relative
displacements or interstory displacements. The maximum
interstory displacement
is
slightly larger than that of the
best passive case and the peak force is quite large. Because
this control algorithm is attempts to minimize the total en-
ergy, it appears to be imitating
a
base isolation system, re-
sulting in
a
large relative displacement at the first floor.
The results in Table I show that the performance of
the system employing
a
clipped-optimal controller sur-
passes that of both passive systems considered. The
clipped-optimal controlleir reduces the maximum third
floor relative displacement and interstory displacement by
an additional 31 and 28 , respectively, as compared to
the best passive response. In addition, this controller re-
duces the maximum floor acceleration more than the pas-
sive-on case, although not as well as in the passive-off
case.
The controlled responses using the modulated homo-
geneous friction control algorithm indicate that this con-
trol algorithm is also quite effective at reducing both the
relative displacements and accelerations of the structure.
The maximum third floor displacement and interstory dis-
placement are reduces by an additional 20 and 23 , re-
spectively, over the best passive case. Furthermore, this
controller achieves a 10 reduction in the maximum abso-
lute acceleration as compared to the best passive case,
while using
a
significantly smaller peak force than all oth-
er control algorithms.
I
x
Figure
2
Diagram
of MR
Damper Implementation
5:
Conclusion
In
this paper
a
number of recently proposed, semi-ac-
tive control strategies were evaluated for use with the MR
damper through a numerical simulation. Here, a model of
a three-story structure was controlled using a single MR
damper. The results demonstrated that the performance of
the resulting controlled syistem and the requirements of the
control device are highly dependent on the control algo-
rithm employed. Each semi-active controller performed
noticeably better than the passive controllers in some way.
583
-
8/9/2019 1997 - A Comparison of Semi-Active Control Strategies
for the MR Damper
5/5
Table
1
:El Centro Earthauake Peak Respons es
0.080
0.196
0.306
0.168
0.281
0.330
0.117
0.243
0.309
0.114
0.185
0.219
Control
Strategy
Uncontrolled
0.080
0.158
0.110
0.168
0.114
0.069
0.117
0.147
0.084
0.114
0.090
0.101
Passive-Off
Passive-On
Decentralized
Bang-Bang
Control
Lyapunov
Control
Clipped-
Optimal
Control
Modulated
Homogeneous
Friction
I
di
2 1
f
(cm) (cdsec ) (N)
(cm)
1400
0.211 0.211 420
0.357 0.153
0.455 0.103 258
1050
477
390
580
703
738 947
702
0.114 0.114 417
0.203 0.121 5 589
0.245 0.093
The largest reduction in the maximum acceleration was
achieved with the decentralized bang-bang approach. The
largest reduction in the third floor displacement and peak
interstory displacement was achieved with the clipped-op-
timal acceleration feedback algorithm. Furthermore, in
this example the modulated homogeneous friction ap-
proach performed quite well, achieving a significant
re-
duction in both the interstory displacement and the
maximum absolute acceleration.
Note that none of the control methods discussed here
requires a model for the M R damper, although a model is
important for system analysis. Algorithms that explicitly
incorporate actuator dynamics and control-structure inter-
action into the design process may offer additional perfor-
mance gains
[4].
Efforts are currently underway to
investigate this possibility.
Acknowledgment
This research is partially supported by National Sci-
ence Foundation Grant Nos. CMS 93-01584 CMS 95-
28083.
References
[l] Brogan, W.L.
Mo dem Control Theory,
Prentice Hall, Engle-
wood Cliffs, New Jersey (1991).
[2] Carlson, J.D. and Spencer Jr. B.F. Magneto-Rheological
Fluid Dampers for Semi-Active Seismic Control, Proc.
of
the 3rd Int. Con
on
Motion and
Vibl:
Control, Chiba, Japan,
[3] Carlson, J.D. and Spencer Jr., B.F. Magneto-Rheological
Fluid Dampers: Scalability and Design Issues for Applica-
Vol. 3, pp. 35-40 (1996).
tion to Dynamic Hazard Mitigation, Proc. 2nd Int. Wkshp.
on Struc. Control, Hong Kong, pp. 99-109, Dec. (1996).
[4] Dyke, S.J., Spencer Jr., B.F., Quast, P., and Sain, M.K.
Role
of Control-Structure Interaction in Protective System De-
sign. J. o Engrg. Mech., Vol. 121 NO. 2, pp. 322-38
(1995).
[5] Dyke, S.J., Spencer Jr., B.F., Quast, P., Sain, M.K.,
Kaspari
Jr., D.C. and Soong,
T.T.
Acceleration Feedback Control of
MDOF Structures,
J.
o
Engrg. Mech., ASC E,
Vol. 122, No.
[6] Dyke, S.J., Spencer Jr., B.F., Quast, P., Kaspari Jr., D.C.,
and
Sain, M.K., Implementation of an AMD Using Acceleration
Feedback Control, Microcomputers in Civil Engrg., Vol.
[7] Dyke, S.J., Spencer
Jr.
B.F., Sain, M.K. and Carlson, J.D.
Seismic Response Reduction Using Magnetorheological
Dampers. Proc.
of
the IFAC World Congress, San Fran-
cisco, CA, June 30-July 5 (1996).
[8] Dyke, S.J., Spencer Jr., B.F., Sain, M.K. and Carlson,
J.D.
Modeling and Control of Magnetorheological Dampers for
Seismic Response Reduction, Smart Materials and Struc-
tures, Vol. 5, pp. 565-575 (1996).
[9] Dyke, S.J. Acceleration Feedback Control Strategies for
Ac-
tive and Semi-Active Systems: Modeling, Algorithm Devel-
opment and Experimental Verification., Ph.D. Dissertation,
University of Notre Dame, Notre Dame, IN (1996).
[10]Dyke, S.J., Spencer Jr., B.F., Sain, M.K., and Carlson,
J.D.,
Experimental Verification of Semi-Active Structural Con-
trol Strategies Using Acceleration Feedback,
Proc. o the
3rd Intl. C on . on Motion and Ebz Control,
Vol. 3 , pp. 291-
296, Chiba, JAPAN, September (1996).
[l l]Dyke, S.J. and Spencer Jr. B.F., Seismic Response
Control
Using Multiple MR Dampers, Proc. o the 2nd
Intl.
Work-
shop
on
Struc. Control, Hong Kong, pp. 163-173 (1996).
[12]Gavin, H.P., Hanson, R.D. and McClamroch, N.H. Control
of Structures Using Electrorheological Dampers,Proc. 1 th
World Con onEarthquake Engrg., Mexico, (1996).
[13]Inaudi, J.A., Modulated Homogeneous Friction (MHF),
submitted (1997).
[14]Leitmann, G., Semiactive Control for Vibration Attenua-
tion,
J of
Intelligent M aterial Systems and Structures,
Vol.
5 September, pp. 841-846 (1994).
9, pp. 907-918 (1996).
11, pp. 305-323 (1996).
[ISIMATLAB. The Math Works, Inc. Natick, Mass. (1994).
[16]McClamroch, N.H. and Gavin, H.P. Closed Loop Structural
Control Using Electrorheological Dampers, Proc.
of
the
Amel: Ctrl. Con , Seattle, Washington, pp. 4173-77 (1995).
[17]Spencer Jr., B.F., Dyke, S.J., Sain, M.K. and Carlson,
J.D.,
Idealized Model of a Magnetorheological Damper, Proc.
of the 12th Con
on
Analysis and Computation, ASCE, Chi-
cago, Illinois, pp. 361-370 (1996).
[18]Spencer Jr., B.F., Dyke, S.J., Sain, M.K., and Carlson,
J.D.
Phenomenological Model for Magnetorheological Damp-
ers, J. Engrg. Mech., Vol. 123, No. 3, pp. 230-238 (1996).
[19]Spencer Jr., B.F., Dyke, S.J., and Deoskar, H.S.
Benchmark
Problems in Structural Control-Part I: Active Mass Driver
System,Proc.
of
the ASC E Struc. Cong. XV Oregon (1997).
[ZOISpencer Jr., B.F. Recent Trends in Vibration Control in
the
U.S.A., Proc. of the 3rd lnt. Con on Motion and Vibl: Con-
trol,Chiba, Japan (1996).
[21]Spencer Jr. B.F., Carlson, J.D., Sain, M.K., and Yang,
G.
.
On the Current Status of Magnetorheological Dampers:
Seismic Protection of Full-scale Structures,
Proc.
o
the
Amel: Control Con , pp. 458-62 (1997).
584












![ACATacat.or.th/download/acat_or_th/journal-4/04 - 04.pdf · APmin APmax Appendix G [1] AP APmax Overpressure Relief Damper Damper 12 Relief Damper Relief Damper (Vent) Fire Damper](https://img.pdfslide.net/doc/110x75/5f7cb481641db55595223717/-04pdf-apmin-apmax-appendix-g-1-ap-apmax-overpressure-relief-damper-damper.jpg)














