Embed Size (px)
Citation preview

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 1
アナログ計算機方式によるアナログ計算機方式による電気機械マルチフィジクス解析手法電気機械マルチフィジクス解析手法
年吉 洋
東京大学 先端科学技術研究センター(本務)東京大学 生産技術研究所マイクロナノメカトロニクス国際研究センター(兼務)
第3回東京MemsONE技術交流会平成22年12月17日(金)14:10~15:10MMCテクノサロン(東京秋葉原)
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 2
本日の内容本日の内容
1.マルチフィジクス解析の必要性2.運動方程式の等価回路モデル3.LTspiceによる連成解析4.デモ(過渡応答、AC解析)5.解析精度6.まとめ
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 3
•微小機械の電気制御•物理量の入口(センサ)•物理量の出口(アクチュエータ)
メカ系
電気系M
E
S
M
メカ系 電気系物理量 機械歪 電気信号
電気信号 電気系 駆動 メカ系 物理量
入口
出口
加速度 おもりの移動 静電容量変化
静電駆動力 ミラーの傾き 光の反射
マルチフィジクスマルチフィジクス解析の必要性解析の必要性集積化MEMS
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 4
トップダウン・ボトムアップの両方で設計製作
システム仕様記述
部品 部品 部品
システム動作確認
部品 部品 部品
部品間のI/O微調整
マルチフィジクスマルチフィジクス解析の必要性解析の必要性
部品仕様決定

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 5
マルチフィジクスの例マルチフィジクスの例
GRIN Lens(Collimator)
Single ModeFiber
PhotovoltaicCell
Beam Splitter Focusing Lens
MEMS Scanner
6 mm
= 1.55 m
= 1.3 mSheath
光ファイバ内視鏡Electrical Circuit Mechanical Motion Optical Ray Tracing
Reference: Muneki Nakada, Chongho Chong, Atsushi Morosawa, Keiji Isamoto, Takuya Suzuki, Hiroyuki Fujita, and Hiroshi Toshiyoshi, “Optical coherence tomography by all-optical MEMS fiber endoscope,” IEICE Elec. Express, 2010.
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 6
010
2030
010
2030
2e-16
1e-16
CombDisplacement Y microns
CombDisplacement X microns
Elec
trost
atic
Cap
acita
nce
of a
uni
t cel
l C
F
Mask Design (Trial)
Mechanical Analysis Electrostatic Analysis
Electromechanical Co-SolveOn Circuit Simulator
Elastic Behavior Model
Mask Design (2D)+ Layer Thickness
Electrostatic Force Behavior Model
MEMS連成解析の手法MEMS連成解析の手法
Poisson’s Equation
Force Deformation
Geometry Capacitance
Voltage Force
Voltage Deformation
Analytical Equivalent Circuit Model(This Work)
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 8
+x
gS
PPp
gSu
F
Vb
VdCpFe
Fm
vx
m
M3Fe1 Fe2Fm1 Fm2
LIMnLIMpm v0x0
v1 v2x1 x2
S
c
Fm1 Fm2
k
v1 v2x1 x2
VDD
R1
10Meg
xLIMp S g
ck LIMn
m
v0x0
.tran 0 0.2 0
1e-4 001.75e-80.8e-6 1e-65e-8-0.8e-6100 8.854e-12
S gc LIMp LIMn m v0 x0k ep
Actuator Module
SuspensionModule
Equation of Motion Solver
AnchorModule
DriveVoltage
Parameters
SPICESPICEベースの解析手法ベースの解析手法発生力は電流として伝達、変位と速度は電圧として分配
T. Konishi, S. Maruyama, T. Matsushima, M. Mita, K. Machida ,N. Ishihara, K. Masu, H. Fujita, H. Toshiyoshi, "A SPICE-based Multi-physics Seamless Simulation Platform for CMOS-MEMS," in Proc. 2010 Int. Conf. on Solid State Devices and Materials (SSDM2010), The Univ. of Tokyo, Tokyo, Japan, Sept. 22-24, 2010, G-6-5 (Late News Paper, oral presentation).
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 9
Electrostatic Force
静電アクチュエータの解析モデル静電アクチュエータの解析モデル平行平板型静電アクチュエータ
VB
k
VA
c
GND
V
SpringConstant
Displacement
Plate Area
Drive Voltage
R ElectricalResistance
GND
i
(VA 0)
Mechanical Anchor
Viscosity
Voltage
Voltage
QA
QB
MassmInitial Gap
2202
1BA VV
xgSF
dxxdC )(
g - x
x
S

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 10
一般的な機械一般的な機械--電気アナロジー電気アナロジー
VqCtd
qdRdtqdL
Fxktdxdc
dtxdm
12
2
2
2
機械系
電気系
速度
電流
力
電圧
変位
電荷
加速度
電流の時間変化
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 11
L
C
R
Vin
Vout
一般的な電気機械変換の弱点一般的な電気機械変換の弱点LCR置き換えモデル
機械的周波数特性からの電気系モデルでは…
静電アクチュエータのプルイン現象が再現できない。
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 12
デジタルミラー
→ タイミング制御、ピクセル明度調整
MEMS-VCO MEMSメモリ
→ 印加電圧による発振周波数制御
→ 印加電圧による保持時間制御
大振幅特性・プルイン現象を利用したMEMS大振幅特性・プルイン現象を利用したMEMS
アナログミラー
RF-MEMSスイッチ
共振光スキャナ
→ 非線形領域の見積もり(安定制御領域)
→ スイッチ・タイミング制御
→ 電圧パルス高、幅による共振振幅の制御
Texas InstrumentsDLP
B. Charlot 2008
Santec Co.
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 13
本研究の手法本研究の手法アナログ回路シミュレータを用いて運動方程式を解く
運動方程式等価回路外力
出力変位・速度
入力電圧・電流
フィードバック・
バネ復元力粘性抵抗
アクチュエータ発生力のモデル化(定式化)はユーザーが行う
Co-Solveはフィードバック等価回路で計算する
2202
1 VxgSF(例)

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 14
xxx1 / s 1 / s1 / m
c
k
EF+
-
mxkxcFx E /
一般的な運動方程式の解法一般的な運動方程式の解法2次の微分方程式 → 積分フィードバック回路
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 15
電気回路による微分の表現電気回路による微分の表現電流入力 → 電圧出力
xx1 / s
C = 1
i
v
x
x
0
1 dtiC
V
理想的な静電容量(等価回路の計算機モデル)にはリーク電圧、寄生容量、非線形性は無い!
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 17
V=V(ep)*V(S)/(V(g)-V(u))
Cp
I=ddt(V(Cp)*(V(Vb)-V(Vd)))
Vb
I=(1/2)*V(ep)*V(S)*(V(Vd)-V(Vb))**2/((V(g)-V(u))**2)
F
1
u
1
S
1
g
8.854e-12
ep
+x
gS
PPp
gSu
F
Vb
VdCp
I=ddt(V(Cp)*(V(Vd)-V(Vb)))
Vd
静電アクチュエータの等価回路モデル静電アクチュエータの等価回路モデル平行平板型静電アクチュエータ
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 18
V=V(ep)*V(S)/(V(g)-V(u))
Cp I=ddt(V(Cp)*(V(Vb)-V(Vd)))
I=(1/2)*V(ep)*V(S)*(V(Vd)-V(Vb))**2/((V(g)-V(u))**2)
8.854e-12
ep+x
gS
PPp
gSu
F
Vb
VdCp
I=ddt(V(Cp)*(V(Vd)-V(Vb)))
1
S
1
g
F
1
u
Vd
Vb
2202
1bd VV
xgSF
bd VVCdtdI
db VVCdtdI
Electrostatic Force Charge/Discharge
Charge/Discharge
Internal Use
Plate Area Initial Gap
Displacement
Drive Voltage(s)
Collaborative work with JAXA, Tokyo Institute of Technology and NTT Advanced Technology, Japan
静電アクチュエータの等価回路モデル静電アクチュエータの等価回路モデル平行平板型静電アクチュエータ

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 19
S
c
Fm1 Fm2
k
v1 v2x1 x2
I=V(c)*(V(v2)-V(v1))+V(k)*(V(x2)-V(x1))
I=-1*V(c)*(V(v2)-V(v1))-V(k)*(V(x2)-V(x1))
1
c
1
k
1
v1
1
v2
Fm1
1
x1
1
x2
Fm2
粘弾性サスペンションの等価回路モデル粘弾性サスペンションの等価回路モデルバネ+ダッシュポッド
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 20
S
c
Fm1 Fm2
k
v1 v2x1 x2
I=V(c)*(V(v2)-V(v1))+V(k)*(V(x2)-V(x1)) I=-1*V(c)*(V(v2)-V(v1))-V(k)*(V(x2)-V(x1))
Fm1
1
k
1
c
1
x1
1
x2
1
v1
1
v2
Fm2
Displacement(Left)
Velocity(Left)
Displacement(Right)
Velocity(Right)
SpringConstant
Viscosity
Visco-elastic Force (Left) Visco-elastic Force (Right)
12
12
xxkvvcF
12
12
xxkvvcF
Collaborative work with JAXA, Tokyo Institute of Technology and NTT Advanced Technology, Japan
粘弾性サスペンションの等価回路モデル粘弾性サスペンションの等価回路モデルバネ+ダッシュポッド
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 21
1 111
1
1
1
1
V=V(pos)1 V=V(pos)
V=V(vel) V=V(vel)
I=V(Fe1)+V(Fe2)1
I=V(Fm1)+V(Fm2)1
V=(V(Fe)+V(Fm))/V(m)
V=idt(V(a),0,((V(x1)>=V(LIMp))&(V(a)>0))|((V(x1)<=V(LIMn))&(V(a)<0)))
V=idt(V(v1),0)
m v0x0LIMp
Fe1
Fe2
Fm1
Fm2
x1
v1
Fe
Fm
LIMn x2
v2
vel
a
pos
Position
m
M3Fe1 Fe2Fm1 Fm2
LIMnLIMpm v0x0
v1 v2x1 x2
運動方程式ソルバーの等価回路モデル運動方程式ソルバーの等価回路モデル力入力 → 変位・速度出力
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 22
m
M3Fe1 Fe2Fm1 Fm2
LIMnLIMpm v0x0
v1 v2x1 x2
1
m
1
LIMp
1
LIMn
1
x0
1
v0
V=V(vel)
v1
V=V(pos)
x1
V=V(vel)
v2
V=V(pos)
x2
1
Fe1
1
Fm1
1
Fe2
1
Fm2
Parameter(s)Initial Conditions
Force Input Force Input
Displacement & PositionOutput
Displacement & PositionOutput
Net Electrostatic Force
Net Restoring Force
Acceleration Velocity Position
Stopper Subroutine (if-clause)
I=V(Fe1)+V(Fe2)
I=V(Fm1)+V(Fm2)
V=(V(Fe)+V(Fm))/V(m) V=idt(V(a),0,((V(x1)>=V(LIMp))&(V(a)>0))|((V(x1)<=V(LIMn))&(V(a)<0)))
1
Fe
1
Fm
a
V=idt(V(v1),0)
Internal Use
Vel Pos
mFa / dtav dtvx
Collaborative work with JAXA, Tokyo Institute of Technology and NTT Advanced Technology, Japan
運動方程式ソルバーの等価回路モデル運動方程式ソルバーの等価回路モデル力入力 → 変位・速度出力

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 23
FeFm
vx
S
c
Fm1 Fm2
k
v1 v2x1 x2
SuspensionModule
AnchorModule
1 1 1 1
Fe Fm v x
Collaborative work with JAXA, Tokyo Institute of Technology and NTT Advanced Technology, Japan
機械アンカーの等価回路モデル機械アンカーの等価回路モデル電流・電圧のターミネータ
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 25
VB
k
VA
c
GND
V
SpringConstant
Displacement
Plate Area
Drive Voltage
R ElectricalResistance
GND
i
(VA 0)
Mechanical Anchor
Viscosity
Voltage
Voltage
QA
QB
MassmInitial Gap
g - x
x
S
解析例(1)解析例(1)平行平板型静電アクチュエータのプルイン解析
Electrostatic micro actuator (bi-directional)
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 26
パラメタの抽出方法(1/3)パラメタの抽出方法(1/3)集中質量 m
S tSmt
Moment of Inertia Im
t
a
2/b
2/
2/
32
12b
bmtabdxxtaI
Density
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 27
l
tF
3
2
3
36
)(
lIEk
xlxEIFxu
l
t
F
M
3
32
12
2312
)(
lIEk
xxlEIFxu
F
l
t
3
192lIEk
4 41221
3lIE
パラメタの抽出方法(2/3)パラメタの抽出方法(2/3)梁の曲げ理論によるサスペンションのバネ定数 k

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 28
Density Viscosity
ckm
Q
Sc
air
2Laminar Flow Viscosity
totaltotal
1radiationacoustic
1support
1air
1material
1total ...
Qkm
c
QQQQQ
パラメタの抽出方法(3/3)パラメタの抽出方法(3/3)空気の層流による粘性 c
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 29
Collaborative work with JAXA, Tokyo Institute of Technology and NTT Advanced Technology, Japan
Voltage Vd (volts)
Pla
te D
ispl
acem
ent x
(mic
rons
)
Pull-inRelease
Pull-in Contact
Damped Oscillation after Release
g31
g31
g31
Stopper Position
This Work
Reference Analytical Model
Electrostatic Pull-in VoltageTheoretical 105 VExperimental 130 V
解析例(1)解析例(1)平行平板型静電アクチュエータのプルイン解析
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 30
m1 m1 m1 m1
m2 m2 m2
m3 m3 m3 m3
b4 b3 b2 b1MSBLSB
Output
k k k k k k
2k 2k 2k
0 10 10 10 1
100 m
分岐モデルの検証分岐モデルの検証MEMDAC (Micro Electro Mechanical Digital/Analog Converter)
物理表現形(上半分)
実際の構造
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 31
A1
Vd
xVb
F
PPnS=1e-4g=1e-5
Vd
xVb
F
PPn2S=1e-4g=1e-5
Equation
Eqn2x_out=u1.Vt+u2.Vt
Vd
xVb
F
PPn3S=1e-4g=1e-5
Vd
xVb
F
PPn4S=1e-4g=1e-5
A2
transientsimulation
TR1Type=linStart=0Stop=1700 msPoints=1701
F
x
Vd
VbPPp4S=1e-4g=1e-5
F
x
Vd
VbPPp3S=1e-4g=1e-5
F
x
Vd
VbPPp2S=1e-4g=1e-5
v1x1
v2x2
S2S1S1
K7k=100c=0.01
v1x1v2x2 S
2S
1S
1
K9k=100c=0.01
v1x1
v2x2
S2S1S1
K6k=200c=0.01
v1x1v2x2 S
2S
1S
1
K8k=100c=0.01
v1x1
v2x2
S2S1S1
K5k=200c=0.01
v1x1v2x2 S
2S
1S
1
K4k=100c=0.01
v1x1v2x2 S
2S
1S
1
K3k=100c=0.01
v1x1
v2x2
S2S1S1
K2k=200c=0.01
x1v1
S1F1 F2
S2M5
v2x2
M1m=1e-5limit=1DF=1E10
x1v1
S1F1 F2
S2M5
v2x2
M2m=1e-5limit=1Rd=1E-10
x1v1
S1F1 F2
S2M5
v2x2
M3m=1e-5limit=5e-6Rd=1E-10
x1v1
S1F1 F2
S2M5
v2x2
M4m=1e-5limit=5e-6Rd=1E-10
x1v1
S1F1 F2
S2M5
v2x2
M5m=1e-5limit=1Rd=1E-10
x1v1
S1F1 F2
S2M5
v2x2
M7m=1e-5limit=5e-6Rd=1E-10
x1v1
S1F1 F2
S2M5
v2x2
M6m=1e-5limit=1Rd=1E-10
x1v1
S1F1 F2
S2M5
v2x2
M8m=1e-5limit=5e-6Rd=1E-100
v1x1
v2x2
S2S1S1
K1k=100c=0.01
F
x
Vd
VbPPp1S=1e-4g=1e-5
x1
u1 u2
x2
u3
x3
u4
x4
V1L
V2L
V3L
V4L V4R
V3R
V2R
V1R
m3k
m1
k
2k m3
k
2k m3
m1
k
2k m3
k
k
m1 m1
Outputb4
b3
b2
b1
分岐モデルの検証分岐モデルの検証4ビットMEMDACのQucs等価回路モデル
(8連立2階微分方程式)

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 32
Right (State 1)
Left (State 0)Right
LeftRight
LeftRight
Left
DynamicRangeD = 6.26 m
b4
b3
b2
b1
OutputDisplacement
DriveVoltage
0000
1111Spike noise due to MSB toggle
Minimum StepD x 2-4 = 0.39 m
0 V10 VMSB
LSB
0 0.02 0.04 0.06 0.08 0.1 0.12 0.14 0.16
Time t second
分岐モデルの検証分岐モデルの検証ローカルなバイナリ・デジタル変位入力 → D/A変換 → 変位出力
100 m
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 33
Drive Voltage
Bias Voltage
Shutter/Mirror
Torsion Hinge
SiliconSubstrate
BOXSOI
Micro Torsion Plate(Mirror / Shutter)
100 um x 1000 um3 x 10 Array
Vd
Vb
IncidentLight
Reflection
Ele
ctro
stat
icTo
rque
ShutterAngle
Electrical Drive Mechanical Response Optical Ray TracingElectrostatic Latch Aperture Control
Stray Light Estimation
解析例(2)解析例(2)電圧 → トーションミラー駆動 → 光の反射
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 34
遮光板付きシャッタアレイ遮光板付きシャッタアレイ
従来版(遮光板なし)
改良版(遮光板あり)
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 35
東大理学部天文センター東大理学部天文センター アタカマ天文台アタカマ天文台

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 36
等価回路モデルの中身等価回路モデルの中身平行平板と90°トーションミラーの組み合わせ
ラッチ電極(平行平板型トーションミラー)
駆動電極(90°トーションミラー)
電流出力トルクを反転
電圧入力角度を反転
Vd
Vb
T ab
Vd
Vb
abT
g
吐き出し
吸い込み
ラッチ電極
シャッタ電極
基板電極
シャッタ角度(入力)
静電トルク(出力)
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 37
0 50 100 150 200 250 300100
50
0
Voltage Vlatch or Vdrive in Volts
Shu
tter A
ngle
in
deg
rees
0 5 10 15 200
2
4
6
8
10
Voltage Vlatch in Volts
Shu
tter A
ngle
in
deg
rees
A
B C D
E
F
Vlatch
Vshutter
Vdrive10 V 15 V
5 V
300 V
-5 V
A B
CDE
F
ラッチ用アドレシング信号のタイミング(基本)ラッチ用アドレシング信号のタイミング(基本)ラッチ状態
ラッチ状態
シャッタ開
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 38
ラッチ電圧のタイミングチャート(不完全動作)ラッチ電圧のタイミングチャート(不完全動作)ラッチ電圧が常時高いと、他の行とのクロストークを発生
A11 A12
A21 A22
Y1
Y2
X1 X2
Vd
Y1
Y2
X1 X2
Vd
Vd Vd
①このタイミングでA11をラッチする。
②A21には5V印加なので、ラッチされない。 ③このタイミングでA22をラッチする。
④A12には15V印加なので、仕様に反してラッチされる。
仕様2x2行列の対角成分をラッチする。 A11 A12
A21 A22
Y1
Y2
X1 X2Vd
0 5 10 15 200
2
4
6
8
10
Voltage Vlatch in Volts
Shu
tter A
ngle
in
deg
rees
A B
CDE
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 39
0 5 10 15 200
2
4
6
8
10
Voltage Vlatch in Volts
Shu
tter A
ngle
in
deg
rees
A B
CDE
ラッチ電圧のタイミングチャート(完全動作)ラッチ電圧のタイミングチャート(完全動作)ラッチ電圧を一瞬下げて、他の行とのクロストークを回避
①このタイミングでA11をラッチする。
②A21には5V印加なので、ラッチされない。 ③このタイミングでA22をラッチする。
④A12には10V印加なので、ラッチされない。
A11 A12
A21 A22
Y1
Y2
X1 X2Vd
Y1
Y2
X1 X2
VdY1
Y2
X1 X2
Vd
Vd Vd
仕様2x2行列の対角成分をラッチする。
A11 A12
A21 A22

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 40
Equation
Eqn1Q=(Im*k)^(1/2)/cf0=(k/Im)^(1/2)/(2*3.14)
Equation
Eqn2Im=(1/3)*h*W*(b^3-a^3)*rhorho=2.33E 3LIMn=-3.14/2*0.95LIM=3.14/2*0.95LIMp=g/b*0.95
Equation
Eqn3k=2*G*h*w^3/(3*l)G=73E 9h=1.5E-6w=1.5E-6l=450E-6L=100E-6W=1000E-6a=20E-6b=400E-6c=5E-1 3g=50e- 6
Equatio n
Eqn4a11_deg=a11.Vt/3.14*180a12_deg=a12.Vt/3.14*180a13_deg=a13.Vt/3.14*180a21_deg=a21.Vt/3.14*180a22_deg=a22.Vt/3.14*180a23_deg=a23.Vt/3.14*180a31_deg=a31.Vt/3.14*180a32_deg=a32.Vt/3.14*180a33_deg=a33.Vt/3.14*180
X1U1=0 VU2=-5 VT1=10 msT2=15 ms
transientsimulation
TR1Type=linStart= 0Stop=200 ms
V1U1=0 VU2=300 VT1=140 msT2=160 ms
Pls3T1=0 msD1=20 msD2=100 ms
Pls1T1=0 msD1=20 msD2=100 ms
X3U1=0 VU2=0 VT1=10 msT2=15 ms
Vh Vs
Vd
LS9Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
Vh Vs
Vd
LS7Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
Vh Vs
Vd
LS6Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
Vh Vs
Vd
LS4Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
Vh Vs
Vd
LS3Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
Vh Vs
Vd
LS1Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
Pls2T1=0D1=20 msD2=100 ms
X2U1=0 VU2=0 VT1=10 msT2=15 ms
Vh Vs
Vd
LS8Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
Vh Vs
Vd
LS5Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
Vh Vs
Vd
LS2Im=7.46e-17k=5.48e-10c=5e-13LIMp=0.119LIMn=-1.49a=20e- 6b=400e- 6g=50e- 6DF1=1E16W=1000e- 6
x1
y3
x3
y2
y1
x2
a33a31
a23a21
a13a11
Vd
a32
a22
a12
testLS3x304.schMatrix 3x3latched a11, a21, a31 (all x1)
シャッタマトリクス3x3シャッタマトリクス3x3 解析モデル解析モデル
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 41
3x3シャッタ開閉パターン(正常動作時の解析結果)
シャッタ閉
シャッタ開
赤い線は、シャッタ角度の変化青い線は、ラッチ制御時のシャッタ角度の拡大表示
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 42
mk m mk k k
x1 x2 x3
mk m mk k k
x1 x2 x3
Physical Model
SPICE model
解析例(3)解析例(3)3体の連成振動子モデル
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 43
ModeAmplitude Ratio Resonant
Angular Frequencyx1 x2 x3
1
1 1
1 1.415 1 0.122*(2 ) = 0.767
2
1 0 -1
1 0 -0.997 0.225*(2 ) = 1.414
3
1 1
1 -1.407 1.004 0.294*(2 ) = 1.847
mk
mk 765.0221
x1x2 x3
x1x2
x3
x1
x2
x3
mk
mk 414.122
mk
mk 848.1223
2
2
1,001.0,1,, kcm
Theoretical
Numerical
Theoretical
Numerical
Theoretical
Numerical
解析例(3)解析例(3)3体の連成振動子モデル モード解析(共振周波数、振幅比)

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 44
Collaborative work with JAXA, Tokyo Institute of Technology and NTT Advanced Technology, Japan
+x
gS
PPp
gSu
F
Vb
VdCpFe
Fm
vx
m
M3Fe1 Fe2Fm1 Fm2
LIMnLIMpm v0x0
v1 v2x1 x2
S
c
Fm1 Fm2
k
v1 v2x1 x2
VDD
R1
10Meg
xLIMp S g
ck LIMn
m
v0x0
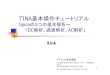
静電アクチュエータのインピーダンス解析
2MHz 4MHz 6MHz 8MHz 10MHz 12MHz 14MHz 16MHz 20MHz-4.0n
-3.2n
-2.4n
-1.6n
-0.8n
0.0n
0.8n
1.6n
2.4n
3.2n
4.0n
Im(Z
)
Z
Mechanical ResonanceTheoretical 6.5 MHz
Inductive
Capacitive
解析例(4)解析例(4)
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 45
1k 10k 100k
Frequency f (Hz)
10-6
10-7
10-8
10-9
10-10
10-11Am
plitu
de G
ain
(dB
)
Increasing Bias VoltageVb = 1, 3, 5, 7 V
Pha
se(d
eg)
1k 10k 100k
0
-90
-180
-270
Frequency f (Hz)
Increasing Bias VoltageVb = 1, 3, 5, 7 V
負のバネ定数効果(バイアス電圧↑で共振周波数↓)
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 46
1k 10k 100k
Frequency f (Hz)
1x109
5x108
0
-5x108
-1x109Rea
ctan
ce I
m(Z
)
Increasing Bias VoltageVb = 1, 3, 5, 7 V 11k 13k12k
Inductive
Capacitive
リアクタンス成分のバイアス電圧依存性共振L成分(インダクタンス)の発生にはバイアス電圧が必要
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 47
1.5e-5 005e-110.9e-7 1e-72e-6-0.9e-71e5
X1
+x
gS
PPp
gSu
F
Vb
VdCpX2
S
c
Fm1 Fm2
k
v1 v2x1 x2
X3FeFm
vx
X4
m
M3Fe1 Fe2Fm1 Fm2
LIMnLIMpm v0x0
v1 v2x1 x2
R1330
R21.5kR3
10k
R410k
PULSE(0 2 0 1n 1n)
C1
200p
C2
2200p
M1TOS001
C3
1p
R5
20
LIMp
S
S g
gc
ck
LIMp
LIMn
LIMn
m
v0x0
m v0 x0k
X
Vd
Vout
.tran 0 0.4m 0
解析例(5)解析例(5)シリコン共振子を用いた発振回路のバイアス点検証
0us 40us 80us 120us 160us 200us 240us 280us 320us 360us 400us0nV
2nV
4nV
6nV
8nV
10nV
12nV
14nV
16nV0.0V
V(x)6.5 MHz
Yuheon Yi, 2009
Collaborative work with JAXA, Tokyo Institute of Technology and NTT Advanced Technology, Japan

Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 48
No. Sub Circuit Model Circuit Symbol
1 Parallel Plate Electrostatic Actuator
2Comb-DriveActuator 1
3Comb-DriveActuator 2
4Parallel-PlateTorsion Mirror
5Large AngleTorsion Mirror
Vb
F
x
Vd
Vb
F
x
Vd
Vd
Vb
F
xx
F
Vb
Vd
F
x
Vd
Vb
Vd
xVb
F
Vd
Vb
T ab
Vd
Vb
abT
g
その他のアクチュエータモデルその他のアクチュエータモデル
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 49
ConventionalSeparated Design Multi-Physics Simulation
MEMS[1] LSI Ref [2] Ref [3] This Work
MEMS mechanical simulation capability FEM ---
Limited types of MEMS module provided.
Equation defined analytical model
Equation defined analytical model
Electrical Circuit Simulation Capability --- Spice Yes but requires
net-list generation YesYes
Spice-based
Simulation Time Lengthy Fast Fast FastParametric Analysis (Parameter Sweep) No Yes Yes Yes Yes
Extension to RF Analysis No Yes No Yes Yes
Deviation Analysis No Yes No Yes YesMulti-physicsAnalysis
Yes but needs extra analysis module. No Yes Yes
Mask Design Layout Capability
On separate circuit-only CAD environment. No No Under
Development[1] S. D. Senturia, Sensors & Actuators A67 (1998) 1.[2] Y. Nishimori, H. Ooiso, S. Mochizuki, N. Fujiwara, T. Tsu-chiya, G. Hashiguchi, Jpn. J. Appl. Phys. 48 (2009) 124504.[3] M. Mita, S. Maruyama, Y. Yi, K. Takahashi, H. Fujita, H. Toshiyoshi, IEEJ Trans. (2010, in press).
マルチフィジクス解析手法の比較マルチフィジクス解析手法の比較
Hiroshi Toshiyoshi © 2010, <[email protected]>, RCAST, Univ. of Tokyo, http://toshi.iis.u-tokyo.ac.jp/Page 51
まとめ
1.運動方程式の等価回路モデルを用いて、電気ー機械変換アナロジーを意識することなく、電気機械の連成解析する手法を提案した。
2.LTspiceを用いた連成解析プラットフォームを構築した。Sub-circuitモデルにより、アイコンを並べる感覚でMEMSアクチュエータの解析が可能になった。
3.Verificationモデルにより、AC解析の精度を保証した。過渡応答(プルイン)の解析誤差を見積もる手法を提案した。分岐モデルによる複雑なサスペンション・ネットワークも表現可能。
4.発展形として、非線形従属電源モデルを用いた静電容量センサや、他の物理モデル(光線追跡、音波、回転系)も可能である。市販の解析ツールがサポートしていない物理現象にも対応可能。