Embed Size (px)
Citation preview
2 La transformada de Laplace
En esta sección vamos a mencionar algunos aspectos relativos a la utilización de latransformada de Laplace que pueden ser tratados con ayuda de Matlab.
El primer detalle a tratar es la resolución de un sistema algebraico de ecuaciones linea-les. Este problema se presenta frecuentemente en análisis de circuitos, especialmente en ré-gimen sinusoidal permanente. No es estrictamente un problema de utilización de transfor-madas de Laplace, pero puede estar relacionado indirectamente con él. El planteamiento delproblema consiste, básicamente, en reducirlo a uno del tipo para el que Matlaab fue desa-rrollado inicialmente (manipulación de matrices y vectores).
El segundo apartado de la sección está dedicado a presentar distintas operaciones conpolinomios, de las cuales una de las más importantes es la determinación de sus raíces, quees un problema básico en el cálculo de transformadas inversas de Laplace.
Finalmente, en el tercer apartado se hace referencia a distintas posibilidades de repre-sentar el módulo y la fase de una función resultante de particularizar la transformada de La-place de la función de transferencia de un circuito para el caso del régimen sinusoidal per-manente.
2.1 Resolución de un sistema de ecuaciones
La forma en la que generalmente se presenta un sistema de ecuaciones en un circuitoen régimen sinusoidal permanente es
[V] = [Z] x [I]
donde [V] es un vector columna de n elementos cada uno de los cuales es la suma algebrai-ca de las fuentes independientes de tensión de las n mallas; [I] es un vector columna de nelementos cada uno de los cuales es la corriente de una malla, y [Z] es una matriz cuadradan x n cuyos elementos son las impedancias de las distintas mallas (los elementos del tipo Zij
con i = j) y las impedancias compartidas entre mallas diferentes (los elementos del tipo Zij
con i ≠ j). Ocasionalmente, [I] puede incluir tensiones introducidas por fuentes dependien-tes. En todo caso, [I] debe reunir todas las incógnitas del sistema, las cuales no pueden apa-recer ni en [V], ni en [Z]. Algo similar ocurriría si quisiéramos resolver el circuito utilizan-do la técnica de análisis por nudos en lugar de la de análisis por mallas.
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 35
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
La resolución de este sistema (es decir, la obtención de los elementos de [I]) medianteMatlab requiere los siguientes pasos.
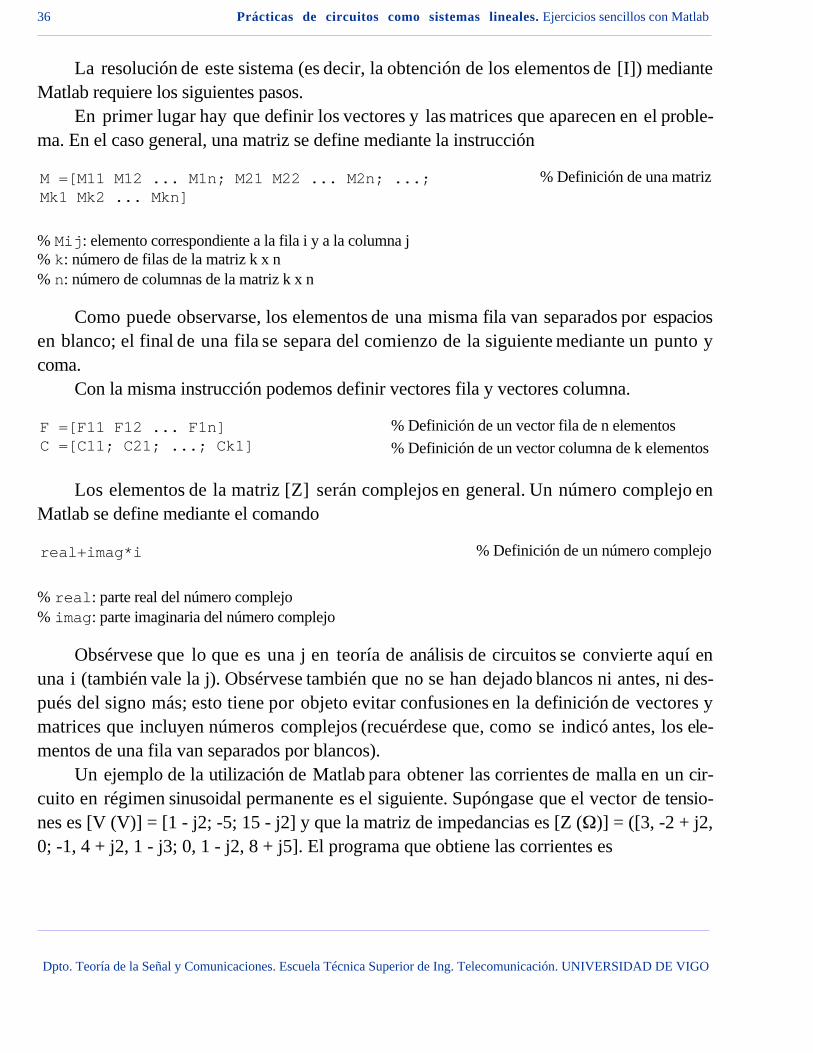
En primer lugar hay que definir los vectores y las matrices que aparecen en el proble-ma. En el caso general, una matriz se define mediante la instrucción
M =[M11 M12 ... M1n; M21 M22 ... M2n; ...;Mk1 Mk2 ... Mkn]
% Definición de una matriz
% Mij: elemento correspondiente a la fila i y a la columna j% k: número de filas de la matriz k x n% n: número de columnas de la matriz k x n
Como puede observarse, los elementos de una misma fila van separados por espaciosen blanco; el final de una fila se separa del comienzo de la siguiente mediante un punto ycoma.
Con la misma instrucción podemos definir vectores fila y vectores columna.
F =[F11 F12 ... F1n]C =[C11; C21; ...; Ck1]
% Definición de un vector fila de n elementos
% Definición de un vector columna de k elementos
Los elementos de la matriz [Z] serán complejos en general. Un número complejo enMatlab se define mediante el comando
real+imag*i % Definición de un número complejo
% real: parte real del número complejo% imag: parte imaginaria del número complejo
Obsérvese que lo que es una j en teoría de análisis de circuitos se convierte aquí enuna i (también vale la j). Obsérvese también que no se han dejado blancos ni antes, ni des-pués del signo más; esto tiene por objeto evitar confusiones en la definición de vectores ymatrices que incluyen números complejos (recuérdese que, como se indicó antes, los ele-mentos de una fila van separados por blancos).
Un ejemplo de la utilización de Matlab para obtener las corrientes de malla en un cir-cuito en régimen sinusoidal permanente es el siguiente. Supóngase que el vector de tensio-nes es [V (V)] = [1 - j2; -5; 15 - j2] y que la matriz de impedancias es [Z (Ω)] = ([3, -2 + j2,0; -1, 4 + j2, 1 - j3; 0, 1 - j2, 8 + j5]. El programa que obtiene las corrientes es
36 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
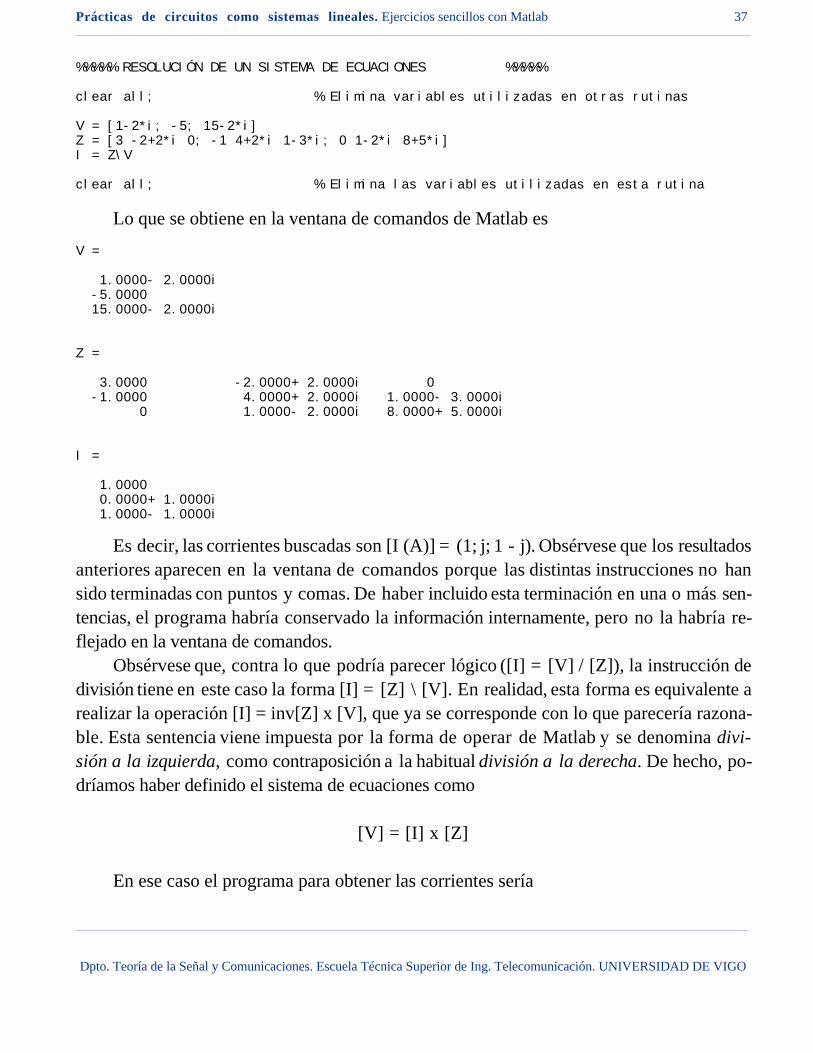
%%%%% RESOLUCIÓN DE UN SISTEMA DE ECUACIONES %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
V = [1-2*i; -5; 15-2*i]Z = [3 -2+2*i 0; -1 4+2*i 1-3*i; 0 1-2*i 8+5*i]I = Z\V
clear all; % Elimina las variables utilizadas en esta rutina
Lo que se obtiene en la ventana de comandos de Matlab es
V =
1.0000- 2.0000i-5.0000 15.0000- 2.0000i
Z =
3.0000 -2.0000+ 2.0000i 0 -1.0000 4.0000+ 2.0000i 1.0000- 3.0000i
0 1.0000- 2.0000i 8.0000+ 5.0000i
I =
1.0000 0.0000+ 1.0000i1.0000- 1.0000i
Es decir, las corrientes buscadas son [I (A)] = (1; j; 1 - j). Obsérvese que los resultadosanteriores aparecen en la ventana de comandos porque las distintas instrucciones no hansido terminadas con puntos y comas. De haber incluido esta terminación en una o más sen-tencias, el programa habría conservado la información internamente, pero no la habría re-flejado en la ventana de comandos.
Obsérvese que, contra lo que podría parecer lógico ([I] = [V] / [Z]), la instrucción dedivisión tiene en este caso la forma [I] = [Z] \ [V]. En realidad, esta forma es equivalente arealizar la operación [I] = inv[Z] x [V], que ya se corresponde con lo que parecería razona-ble. Esta sentencia viene impuesta por la forma de operar de Matlab y se denomina divi-sión a la izquierda, como contraposición a la habitual división a la derecha. De hecho, po-dríamos haber definido el sistema de ecuaciones como
[V] = [I] x [Z]
En ese caso el programa para obtener las corrientes sería
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 37
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
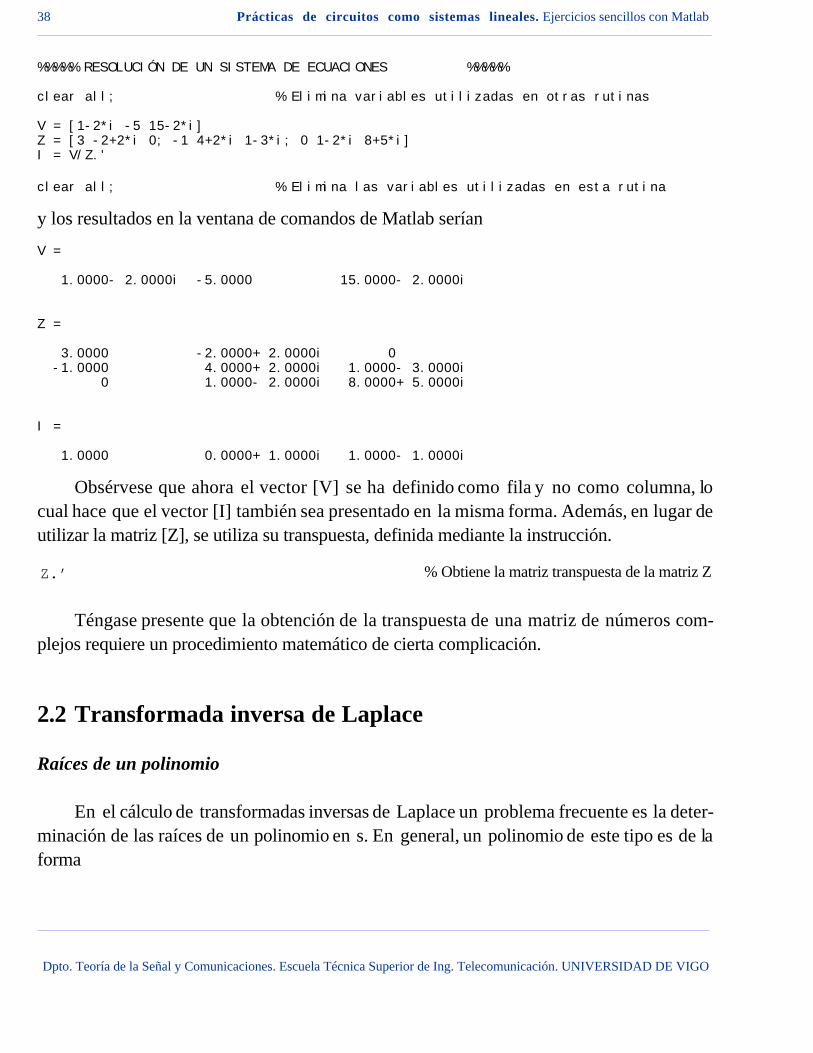
%%%%% RESOLUCIÓN DE UN SISTEMA DE ECUACIONES %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
V = [1-2*i -5 15-2*i]Z = [3 -2+2*i 0; -1 4+2*i 1-3*i; 0 1-2*i 8+5*i]I = V/Z.'
clear all; % Elimina las variables utilizadas en esta rutina
y los resultados en la ventana de comandos de Matlab serían
V =
1.0000- 2.0000i -5.0000 15.0000- 2.0000i
Z =
3.0000 -2.0000+ 2.0000i 0 -1.0000 4.0000+ 2.0000i 1.0000- 3.0000i
0 1.0000- 2.0000i 8.0000+ 5.0000i
I =
1.0000 0.0000+ 1.0000i 1.0000- 1.0000i
Obsérvese que ahora el vector [V] se ha definido como fila y no como columna, locual hace que el vector [I] también sea presentado en la misma forma. Además, en lugar deutilizar la matriz [Z], se utiliza su transpuesta, definida mediante la instrucción.
Z.’ % Obtiene la matriz transpuesta de la matriz Z
Téngase presente que la obtención de la transpuesta de una matriz de números com-plejos requiere un procedimiento matemático de cierta complicación.
2.2 Transformada inversa de Laplace
Raíces de un polinomio
En el cálculo de transformadas inversas de Laplace un problema frecuente es la deter-minación de las raíces de un polinomio en s. En general, un polinomio de este tipo es de laforma
38 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO

P(s) = aksk + ak-1sk-1 + ... + a0
en la que los coeficientes de los términos exponenciales son números reales. Sin embargo,esta forma no es la más adecuada para utilizar el procedimiento convencional de obtener latransformada inversa de Laplace. Es preferible expresar el polinomio como el producto deuna serie de términos en los que aparecen las raíces de aquél. Es decir,
P(s) = aksk + ak-1sk-1 + ... + a0 = (s + s1)(s + s2) ... (s + sj)q ... (s + sm)
A cualquiera de los términos -sk se le denomina raíz del polinomio. sj (y cualquier otraque figure en un término exponencial) se le denomina raíz múltiple de orden q (el exponen-te del término exponencial). El orden del polinomio es k (es decir, el exponente de la mayorpotencia de s que figure en el polinomio). k es igual al número total de raíces del polinomio;en el cómputo de este número cada raíz múltiple cuenta tantas veces como su propioorden. Las raíces de un polinomio pueden ser reales o complejas; si un número complejo esraíz de un polinomio representativo de un circuito, su complejo conjugado también lo es.
En el problema de determinar las raíces de un polinomio pueden presentarse varioscasos muy sencillos, como son los que se mencionan seguidamente.
Polinomio P(s) Raíces
s + r
(s + r)n
as2 + bs + c (polinomio cuadrático)
-r
-r (raíz múltiple de orden n)
r1, 2 = - b ± b2 - 4ac
2a
Al margen de estos casos, no existe ningún procedimiento analítico sencillo para obte-ner las raíces de polinomios de orden superior al segundo. Es necesario recurrir a procedi-mientos numéricos para realizar dicha tarea. En Matlab esta operación se realiza con la ins-trucción
roots (pol) % Obtiene las raíces del polinomio pol
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 39
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO

Obsérvese que la aplicación de esta instrucción requiere definir previamente el polino-mio del que se quieren obtener las raíces. El polinomio se define como un vector fila cuyoselementos son los coeficientes ordenados de los términos exponenciales, empezando por elcorrespondiente a la potencia mayor. Si faltan algunos de los términos exponenciales, estacircunstancia es tenida en cuenta asignando el valor nulo al coeficiente correspondiente.Recuérdese que el término independiente del polinomio, si lo hay, corresponde a una poten-cia cuyo exponente es nulo; por tanto, dicho término debe ser incluido en la definición delpolinomio. Así, la instrucción
pol = [a(k) a(k-1) ... a(0)] % Definición de un polinomio
corresponde al polinomio P(s) = aksk + ak-1s
k-1 + ... + a0. Si el polinomio no va a ser utiliza-do con posterioridad a la obtención de sus raíces, pueden combinarse las dos instruccionesque acabamos de mencionar en una sola y utilizar la sentencia
roots ([a(k) a(k-1) ... a(0)]) % Obtiene las raíces de un polinomio
A título de ejemplo, considérese el polinomio P(s) = s4 + 6s3 + 14s2 + 16s + 8. La uti-lización de la rutina
%%%%% RAÍCES DE UN POLINOMIO %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
roots ([1 6 14 16 8])
clear all; % Elimina las variables utilizadas en esta rutina
proporciona los siguientes resultados en la ventana de comandos de Matlab:
-2.0000+ 0.0000i-2.0000- 0.0000i-1.0000+ 1.0000i-1.0000- 1.0000i
Es decir, el polinomio tiene una raíz real doble (-2 + j0) y dos raíces complejas (-1 + j,-1 - j), de las cuales una es la conjugada de la otra.
40 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO

Valor de un polinomio
Otra operación de cierto interés que puede realizarse con Matlab es la determinacióndel valor particular que toma un polinomio cuando la variable independiente tiene un valordado. Ello puede realizarse utilizando la instrucción
polyval (pol, k) % Obtiene el valor del polinomio pol cuando la variable vale k
A título de ejemplo, la rutina siguiente permite hallar el valor que toma el polinomioP(s) definido anteriormente cuando s es igual a -2.
%%%%% VALOR DE UN POLINOMIO %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
P = [1 6 14 16 8];polyval (P, -2)
clear all; % Elimina las variables utilizadas en esta rutina
El resultado es
ans =
0
Es un resultado lógico, por cuanto hemos pretendido calcular el valor del polinomiocuando la variable es igual a una de sus raíces y, por definición, éstas son los valores queanulan el polinomio.
Producto de polinomios
Otra operación de interés es el producto de dos polinomios. Se realiza utilizando la ins-trucción
conv (pol1, pol2) % Efectúa el producto de los polinomios pol1 y pol2
Así, por ejemplo, si multiplicamos los polinomios P1(s) = s2 + 2s + 2 y P2(s) = s2 + 4s+ 4 mediante la rutina
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 41
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
%%%%% PRODUCTO DE POLINOMIOS %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
P1 = [1 2 2];P2 = [1 4 4];
conv (P1, P2)
clear all; % Elimina las variables utilizadas en esta rutina
obtenemos el siguiente resultado:
ans =
1 6 14 16 8
Es decir, el polinomio resultante del producto está definido por sus coeficientes, aligual que cualquier otro polinomio. Obsérvese que el resultado obtenido en este ejemplocoincide con el polinomio P(s) definido anteriormente. Obsérvese también que la instrucciónque se utiliza para el producto (conv) significa convolución. Sin embargo, aunque esta ins-trucción tiene un papel relevante en la obtención de la convolución de señales discretas, noguarda una relación inmediata con la convolución de señales continuas, tal y como se indicóen la sección precedente de este manual.
División de polinomios
Se trata de la operación inversa de la que se acaba de mencionar. Se realiza utilizandola instrucción
deconv (pol1, pol2) % Divide el polinomio pol1 entre el polinomio pol2
Así, por ejemplo, si dividimos el polinomio P1(s) = s3 + 3s2 + 2s + 2 entre el polinomioP2(s) = s2 + 4s + 4 mediante la rutina
%%%%% DIVISIÓN DE POLINOMIOS %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
P1 = [1 3 2 2];P2 = [1 4 4];
[cociente, resto] = deconv (P1, P2)
clear all; % Elimina las variables utilizadas en esta rutina
42 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
obtenemos los siguientes valores para el cociente y el resto de la operación:
cociente =
1 -1
resto =
0 0 2 6
Ambas variables definen sendos polinomios. El segundo es el numerador de una frac-ción cuyo denominador coincide con el del cociente original. En otras palabras, el resultadoobtenido nos indica que
P1(s)P2(s)
= s - 1 + 2s + 6s2 + 4s + 4
Esta instrucción tiene un interés especial cuando una transformada de Laplace está de-finida por una fracción impropia (es decir, el orden del numerador es mayor o igual que eldel denominador). Recuérdese que la aplicación del procedimiento convencional para obte-ner la transformada inversa requiere efectuar el cociente de forma que el resto sea una frac-ción propia (el orden del numerador es menor que el del denominador).
Descomposición de un cociente en suma de fracciones simples
Podemos utilizar todo lo que acabamos de exponer para obtener transformadas inver-sas de Laplace. Después del cociente de polinomios, quedaría por obtener las raíces del de-nominador del resto (roots) y formular tantas fracciones como raíces tenga dicho denomi-nador (recuérdese que una raíz múltiple cuenta tantas veces como su orden). Sin embargo,hay un procedimiento directo para descomponer un cociente en una suma de fraccionessimples cuyos denominadores corresponden a las raíces del denominador original. Ese pro-cedimiento se ejecuta en Matlab mediante la instrucción
[num, raíces, cociente] = residue (pol1, pol2)
% Expande en suma de fracciones simples% el cociente entre los polinomios pol1 y pol2
% num: vector columna en la que aparecen los numeradores de las distintas fracciones% raíces: vector columna de las raíces del denominador ordenadas igual que los numeradores% cociente: cociente de los dos polinomios (sólo si la fracción original es impropia)
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 43
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
No es preciso invocar explícitamente estos tres parámetros en la rutina dedicada a ladescomposición de un cociente; si no se pone un punto y coma tras la instrucción residue,tales parámetros aparecen directamente en la ventana de comandos. En cualquier caso, songuardados internamente por el programa y puede hacerse uso de ellos en operaciones pos-teriores.
Al ejecutar esta instrucción una raíz múltiple no aparece señalada explícitamente comotal. La indicación de semejante característica la proporciona el hecho de que la raíz múltipleaparece repetida tantas veces como su orden. A cada una de ellas le corresponde el nume-rador que ocupa la misma posición que la raíz (o su repetición) en ambos vectores. Recuér-dese que, al formular las fracciones simples originadas por una raíz múltiple, el denomina-dor de la primera de éstas aparece elevado a la unidad; el segundo, al cuadrado, y así suce-sivamente hasta alcanzar el orden de multiplicidad de la rutina.
A título de ejemplo, considérese la rutina
%%%%% EXPANSIÓN DE UN COCIENTE EN FRACCIONES SIMPLES %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
P1 = [1 3 2 2];P2 = [1 4 4];
[num, raíces, cociente] = residue (P1, P2)
clear all; % Elimina las variables utilizadas en esta rutina
El resultado que aparece en la ventana de comandos de Matlab es
num =
22
raíces =
-2-2
cociente =
1 -1
44 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
Es decir, se ha realizado la siguiente operación
P1(s)P2(s)
= s - 1 + 2s + 2
+ 2(s + 2)2
siendo P1(s) y P2(s) los polinomios definidos anteriormente.La operación inversa de la que acabamos de describir permite recomponer el cociente
de dos polinomios a partir de los valores del cociente, las raíces y los numeradores. Así, porejemplo, la rutina
%%%%% RECOMPOSICIÓN DE UN COCIENTE %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
num = [2; 2];raíces = [-2; -2];cociente = [1; -1];
[P1, P2] = residue (num, raíces, cociente)
clear all; % Elimina las variables utilizadas en esta rutina
devuelve el resultado
P1 =
1 3 2 2
P2 =
1 4 4
que, como puede comprobarse, corresponde a los polinomios a los que nos estamos refi-riendo.
Evidentemente, todo lo que acabamos de exponer es aplicable igualmente en el casode que la expansión conduzca a fracciones en las que aparecen raíces complejas. Así, porejemplo, si se trata del cociente
P1(s)P2(s)
= 0.5ss2 + s + 0.5
la ejecución de la correspondiente instrucción residue conduce a
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 45
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO

num =
0.2500+ 0.2500i0.2500- 0.2500i
raíces =
-0.5000+ 0.5000i-0.5000- 0.5000i
En términos matemáticos, este resultado puede expresarse como
P1(s)P2(s)
= 0.5ss2 + s + 0.5
= 0.25 + j0.25s + 0.5 - j0.5
+ 0.25 - j0.25s + 0.5 + j0.5
= Ks + s1
+ K*s + s1
*
con lo que la transformada inversa de Laplace de este cociente es directamente un únicotérmino en el que aparecen el módulo y la fase de K. Éstos pueden obtenerse por cálculomanual, o utilizando instrucciones de Matlab a las que se hace referencia más adelante.
2.3 Respuesta en régimen sinusoidal permanente
La respuesta de un circuito en régimen sinusoidal permanente puede ser determinadaa partir del conocimiento de su función de transferencia expresada en función de la variables; para ello basta sustituir dicha variable por jω. Esto supone una diferencia importante conrelación a lo expuesto en el apartado anterior. En él, s era una variable genérica, mientrasque ahora pasa a ser una variable continua. Dado que es imposible reproducir exactamenteen Matlab una variable continua, la transformación implica el paso de la variable genérica sa la variable discreta jω. En otras palabras, en lo que sigue s va a comportarse como unvector que almacena los distintos valores que puede tomar ω.
Por otro lado, una vez que se ha efectuado la transformación indicada, la función detransferencia H(s) pasa a ser una función variable con la frecuencia (H(jω)). La observaciónde la variación de esta función proporciona información muy útil acerca del comportamien-to del circuito; por ejemplo, permite determinar su tipo de respuesta cuando el circuito estratado como un filtro. Dado que la nueva función H(jω) es en general compleja, dicha va-riación queda determinada a partir de las variaciones de su módulo y su fase con ω. En loque sigue abordaremos precisamente estos aspectos: el tratamiento de s como vector, la de-finición del rango de variación de este vector, y la obtención de módulos y fases de funcio-nes complejas.
46 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
En definitiva, se trata de un problema cuyo planteamiento puede resumirse en las si-guientes equivalencias matemáticas
H(s) = P1(s)P2(s)
⇒ H(jω) = P1(jω)P2(jω)
= P1(jω)∠θ1(ω)
P2(jω)∠θ2(ω)
= H(jω)∠θ(ω)
H(jω) = P1(jω)P2(jω)
θ(ω) = θ1(ω) - θ2(ω)
En otras palabras, hay distintas posibilidades de afrontarlo. A continuación considera-remos algunas de ellas.
Rango de frecuencias
En los problemas abordados en este apartado lo que se persigue es representar la va-riación de una magnitud frente a la frecuencia angular (ω). Por consiguiente, lo primero quehay que hacer en cualquiera de dichos problemas es establecer el rango de valores que debetomar ω.
Este aspecto es, en principio, formalmente idéntico al de establecer una base de tiem-pos que hemos considerado en la sección anterior. Por tanto, podemos definir el rango defrecuencias mediante cualquiera de los dos procedimientos que se mencionaron en dichasección, procedimientos que habían sido denominados lineales; basta sustituir la variable tpor la variable ω para definir el rango de frecuencias. Ahora bien, al abordar problemas derespuesta en frecuencia de circuitos funcionando en régimen sinusoidal permanente el rangode variación de la frecuencia suele cubrir varias décadas, con lo que establecer como linealtal variación no suele ser lo más conveniente.
Una instrucción más adecuada es instrucción
logspace (d1, d2, puntos) % Define un rango de valores de variación logarítmica
% d1: parámetro que define el inicio del rango (10d1)% d2: parámetro que define el final del rango (10d2)% puntos: número de puntos totales entre el inicio y el final del rango
(la separación entre dos puntos consecutivos es igual en coordenadas logarítmicas)
Así, por ejemplo, la instrucción w = logspace (1, 3, 1000) genera un vector de 1000puntos comprendidos entre 10 y 103.
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 47
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
Representación de números complejos
Hay cuatro instrucciones básicas para caracterizar un número complejo. En el casoparticular que estamos tratando, dicho número tendrá la forma genérica z(ω) = a(ω) +jb(ω). Las instrucciones a las que nos referimos son:
real (z)imag (z)abs (z)angle (z)
% Obtiene la parte real de z% Obtiene la parte imaginaria de z% Obtiene el valor absoluto de z% Obtiene la fase de z (en rad)
A título de ejemplo, consideremos la siguiente rutina.
%%%%% NÚMEROS COMPLEJOS %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
w = logspace (-1, 3, 1000); % Rango de frecuencias
a = 1; b = (w - 1./w); z = a + i*b; % Número complejo
subplot (2, 2, 1); % Parte realsemilogx (w, real(z), 'b', 'LineWidth', 2); % Curva en azul de grosor 2xlabel ('Frecuencia angular (rad/s)', 'FontName', 'Times', 'Fontsize', 14); % Absylabel ('Parte real', 'FontName', 'Times', 'Fontsize', 14); % Ordaxis ([10^(-1) 10^3 (1/3)*min(real(z)) (3/2)*max(real(z))]); % Área de dibujogrid on; % Malla
subplot (2, 2, 2); % Parte imaginariasemilogx (w, imag(z), 'b', 'LineWidth', 2); % Curva en azul de grosor 2xlabel ('Frecuencia angular (rad/s)', 'FontName', 'Times', 'Fontsize', 14); % Absylabel ('Parte imaginaria', 'FontName', 'Times', 'Fontsize', 14); % Ordaxis ([10^(-1) 10^3 (1/3)*min(imag(z)) (3/2)*max(imag(z))]); % Área de dibujogrid on; % Malla
subplot (2, 2, 3); % Módulosemilogx (w, abs(z), 'b', 'LineWidth', 2);
% Curva en azul de grosor 2xlabel ('Frecuencia angular (rad/s)', 'FontName', 'Times', 'Fontsize', 14); % Absylabel ('Módulo', 'FontName', 'Times', 'Fontsize', 14); % Ordaxis ([10^(-1) 10^3 (1/3)*min(abs(z)) (3/2)*max(abs(z))]); % Área de dibujogrid on; % Malla
subplot (2, 2, 4); % Fasesemilogx (w, angle(z), 'b', 'LineWidth', 2); % Curva en azul de grosor 2xlabel ('Frecuencia angular (rad/s)', 'FontName', 'Times', 'Fontsize', 14); % Absylabel ('Fase (rad)', 'FontName', 'Times', 'Fontsize', 14); % Ordaxis ([10^(-1) 10^3 -3*pi/4 3*pi/4]); % Área de dibujogrid on; % Malla
clear all; % Elimina las variables utilizadas en esta rutina
48 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
a = 1
b = ω - 1ω
z = a + jb
Datos:
a
100
102
0.5
1
1.5
Frecuencia angular (rad/s)Pa
rte
real
100
102
0
200
400
600
800
1000
1200
1400
Frecuencia angular (rad/s)
Part
e im
agin
aria
100
102
200
400
600
800
1000
1200
1400
Frecuencia angular (rad/s)
Mód
ulo
100
102
-2
-1
0
1
2
Frecuencia angular (rad/s)
Fase
(ra
d)
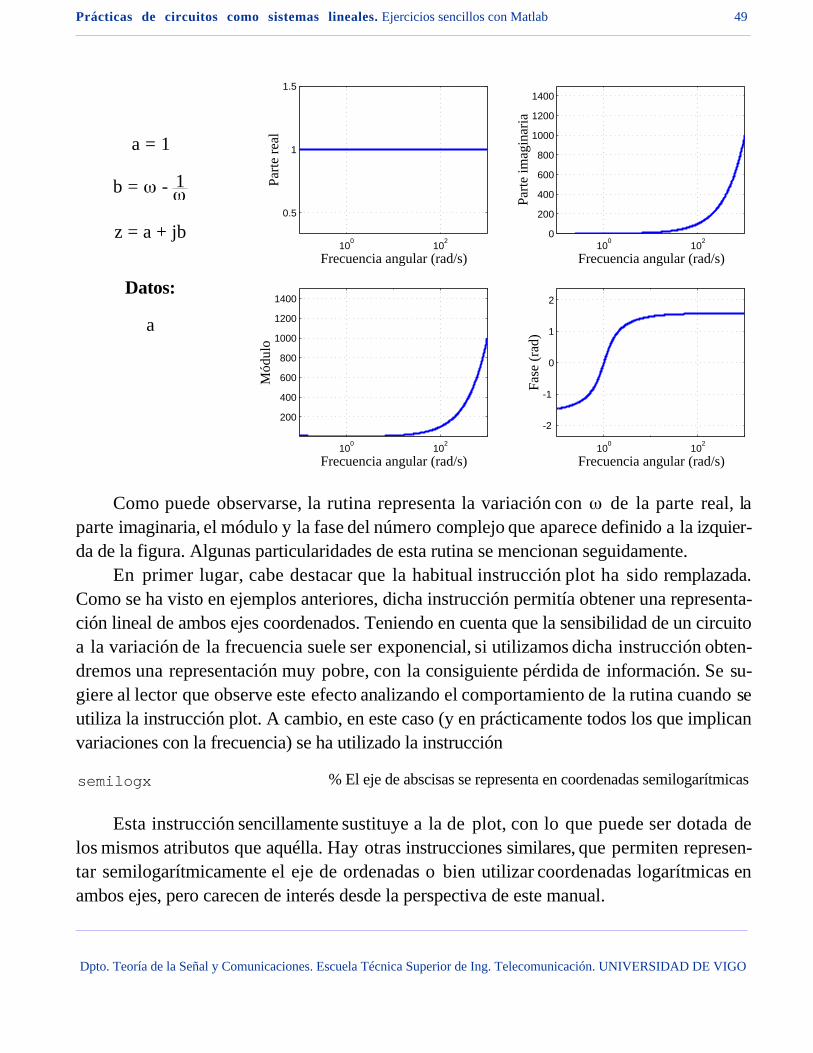
Como puede observarse, la rutina representa la variación con ω de la parte real, laparte imaginaria, el módulo y la fase del número complejo que aparece definido a la izquier-da de la figura. Algunas particularidades de esta rutina se mencionan seguidamente.
En primer lugar, cabe destacar que la habitual instrucción plot ha sido remplazada.Como se ha visto en ejemplos anteriores, dicha instrucción permitía obtener una representa-ción lineal de ambos ejes coordenados. Teniendo en cuenta que la sensibilidad de un circuitoa la variación de la frecuencia suele ser exponencial, si utilizamos dicha instrucción obten-dremos una representación muy pobre, con la consiguiente pérdida de información. Se su-giere al lector que observe este efecto analizando el comportamiento de la rutina cuando seutiliza la instrucción plot. A cambio, en este caso (y en prácticamente todos los que implicanvariaciones con la frecuencia) se ha utilizado la instrucción
semilogx % El eje de abscisas se representa en coordenadas semilogarítmicas
Esta instrucción sencillamente sustituye a la de plot, con lo que puede ser dotada delos mismos atributos que aquélla. Hay otras instrucciones similares, que permiten represen-tar semilogarítmicamente el eje de ordenadas o bien utilizar coordenadas logarítmicas enambos ejes, pero carecen de interés desde la perspectiva de este manual.
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 49
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
En segundo lugar, obsérvese que la fase del número complejo se calcula y se represen-ta en radianes. Ésa es la representación de Matlab por defecto, pero existen otras posibilida-des, que serán expuestas más adelante.
También es importante destacar que, en la definición del número complejo, se utiliza eloperador ./, que indica que el numerador debe ser dividido por todos y cada uno de los ele-mentos del vector que constituye el denominador. De no utilizarse este operador, se produ-ciría una indefinición (con la consiguiente paralización del programa), ya que Matlab ignora-ría qué valor concreto del vector denominador debe ser utilizado en el cociente.
Finalmente, en la rutina se utilizan de forma accesoria las instrucciones
max (x)min (x)
% Obtiene el valor máximo del vector x% Obtiene el valor mínimo del vector x
Números complejos expresados como fracciones
Aunque útil para ilustrar algunos aspectos de la representación de números complejos,el ejemplo que acabamos de considerar es raramente representativo de lo que realmente in-teresa en el análisis de la respuesta en frecuencia de circuitos funcionando en régimen sinu-soidal permanente. Lo más habitual es que la función de transferencia esté caracterizada porel cociente de dos polinomios de s; al sustituir esta variable por jω queda un número com-plejo que varía con la frecuencia. Es a este caso al que nos referiremos en este epígrafe.
La siguiente rutina permite obtener el módulo y la fase de una función de transferenciarepresentada por una fracción propia (el orden del numerador es menor que el del denomi-nador), Hs, en la que el numerador y el denominador son dos polinomios de s. Como puedeobservarse, tanto el módulo y la fase se obtienen aplicando directamente las instruccionesabs y angle a la fracción en lugar de hacerlo al numerador y al denominador por separado.
%%%%% NÚMEROS COMPLEJOS COMO FRACCIONES %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
inicial = -2; final = - inicial; puntos = 1000; % Rango de frecuenciasw = logspace (inicial, final, puntos);
s = i*w; % Número complejo como fracciónHs = 0.5*s./(s.^2 + 2*s + 2);moduloh = abs(Hs);fase = (180/pi)*angle(Hs);
subplot (2, 1, 1); % Módulosemilogx (w, moduloh, 'b', 'LineWidth', 2); % Curva en azul de grosor 2xlabel ('Frecuencia angular (rad/s)', 'FontName', 'Times', 'Fontsize', 14); % Absylabel ('Módulo', 'FontName', 'Times', 'Fontsize', 14); % Ord
50 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
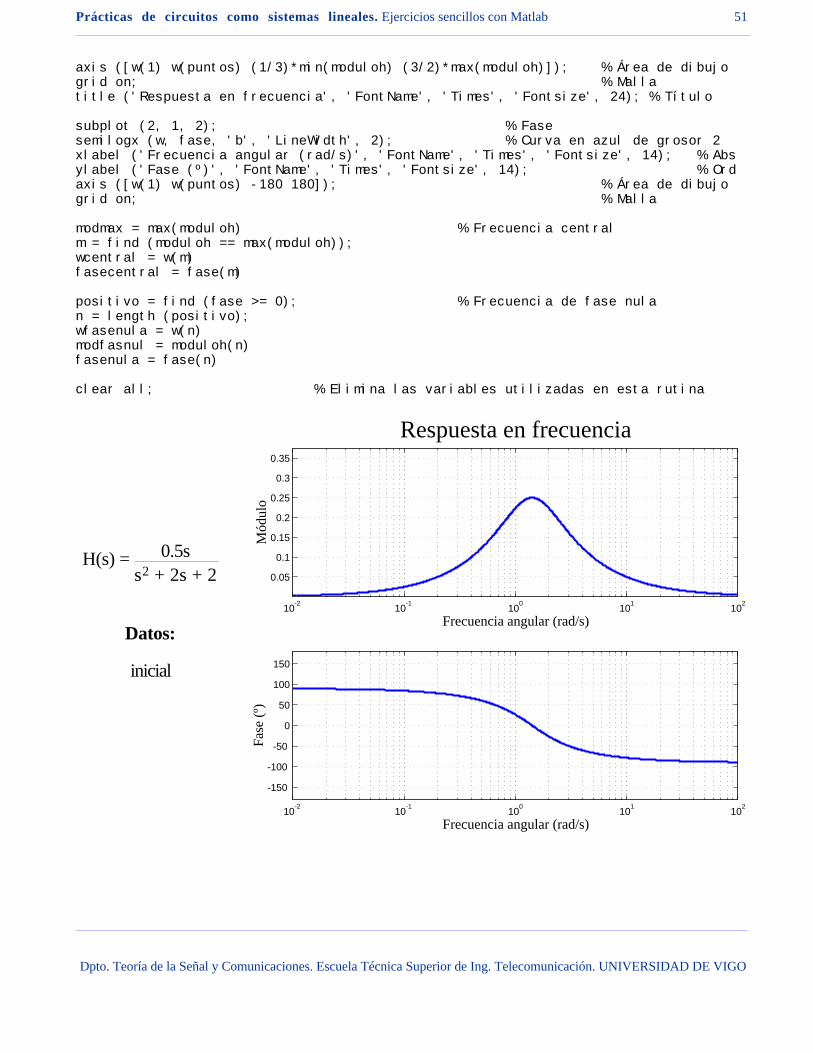
axis ([w(1) w(puntos) (1/3)*min(moduloh) (3/2)*max(moduloh)]); % Área de dibujogrid on; % Mallatitle ('Respuesta en frecuencia', 'FontName', 'Times', 'Fontsize', 24); % Título
subplot (2, 1, 2); % Fasesemilogx (w, fase, 'b', 'LineWidth', 2); % Curva en azul de grosor 2xlabel ('Frecuencia angular (rad/s)', 'FontName', 'Times', 'Fontsize', 14); % Absylabel ('Fase (º)', 'FontName', 'Times', 'Fontsize', 14); % Ordaxis ([w(1) w(puntos) -180 180]); % Área de dibujogrid on; % Malla
modmax = max(moduloh) % Frecuencia centralm = find (moduloh == max(moduloh));wcentral = w(m)fasecentral = fase(m)
positivo = find (fase >= 0); % Frecuencia de fase nulan = length (positivo);wfasenula = w(n)modfasnul = moduloh(n)fasenula = fase(n)
clear all; % Elimina las variables utilizadas en esta rutina
H(s) = 0.5ss2 + 2s + 2
Datos:
inicial
10-2
10-1
100
101
102
0.05
0.1
0.15
0.2
0.25
0.3
0.35
Frecuencia angular (rad/s)
Mód
ulo
Respuesta en frecuencia
10-2
10-1
100
101
102
-150
-100
-50
0
50
100
150
Frecuencia angular (rad/s)
Fase
(º)
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 51
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
Obsérvese, en la definición de la fracción, la utilización de los operadores ./ y .ˆ, ya quelas operaciones aludidas son efectuadas entre vectores. Nótese también que la fase de la fun-ción de transferencia ha sido expresada en º.
La rutina se completa con un conjunto de instrucciones finales destinadas a proporcio-nar ciertos datos que no pueden obtenerse (al menos con precisión) de la observación de lascurvas. El primer grupo de tales instrucciones está destinado a obtener la frecuencia central(es decir, aquélla para la que se obtiene el máximo del módulo de la función de transferen-cia), y los valores del módulo y la fase correspondientes a dicha frecuencia. El segundogrupo tiene por objeto determinar la frecuencia para la que se anula la fase de la función detransferencia, y los consiguientes valores de módulo y fase. Los resultados obtenidos se in-dican más abajo.
Es conveniente que el lector repare en la forma en la que se ha establecido el cálculode la segunda frecuencia. El máximo del módulo es un valor concreto del vector que con-tiene los valores de aquél; por tanto, es posible hallar directamente la posición que ocupa talvalor en el vector. En cambio, la condición de que la fase sea nula es algo impuesto exter-namente. En otras palabras, el vector que almacena los valores de la fase puede no contenerel valor 0 exacto. Por consiguiente, es preciso determinar de forma aproximada la posicióndentro del vector que ocupa el valor de la fase más próximo a 0.
modmax = 0.2500
wcentral = 1.4130
fasecentral = 0.0681
wfasenula = 1.4130
modfasnul = 0.2500
fasenula = 0.0681
Obsérvese que en este caso las dos frecuencias son idénticas en apariencia. Ello puedeser así realmente, o bien el resultado de las aproximaciones y redondeos internos del pro-grama en el caso particular de la función de transferencia considerada. Sin embargo, deberecordarse que, en general, tales frecuencias pueden diferir significativamente una de otra.
Consideraciones sobre la representación de la fase
En ocasiones la representación de la fase presenta una discontinuidad (por ejemplo, pa-sando de -180 º a 180 º) a una frecuencia dada. Esta circunstancia puede deberse a que el
52 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
circuito se comporta de forma que realmente se produce dicha discontinuidad, o bien puedeser originada por la manipulación matemática interna de Matlab. A este respecto, recuérde-se que, a fin de cuentas, los ángulos α y 180 º + α tienen la misma tangente y que es la tan-gente la función que suele utilizarse en la determinación de ángulos en ordenadores y calcu-ladoras.
Para tener la seguridad de que el comportamiento representado es el que corresponderealmente al circuito puede utilizarse la instrucción
unwrap (fase) % Elimina discontinuidades debidas al cálculo en la representación de la fase
La instrucción unwrap utiliza y devuelve ángulos expresados en radianes. Esta circuns-tancia debe ser tenida en cuenta cuando se pretende obtener representaciones en grados se-xagesimales.
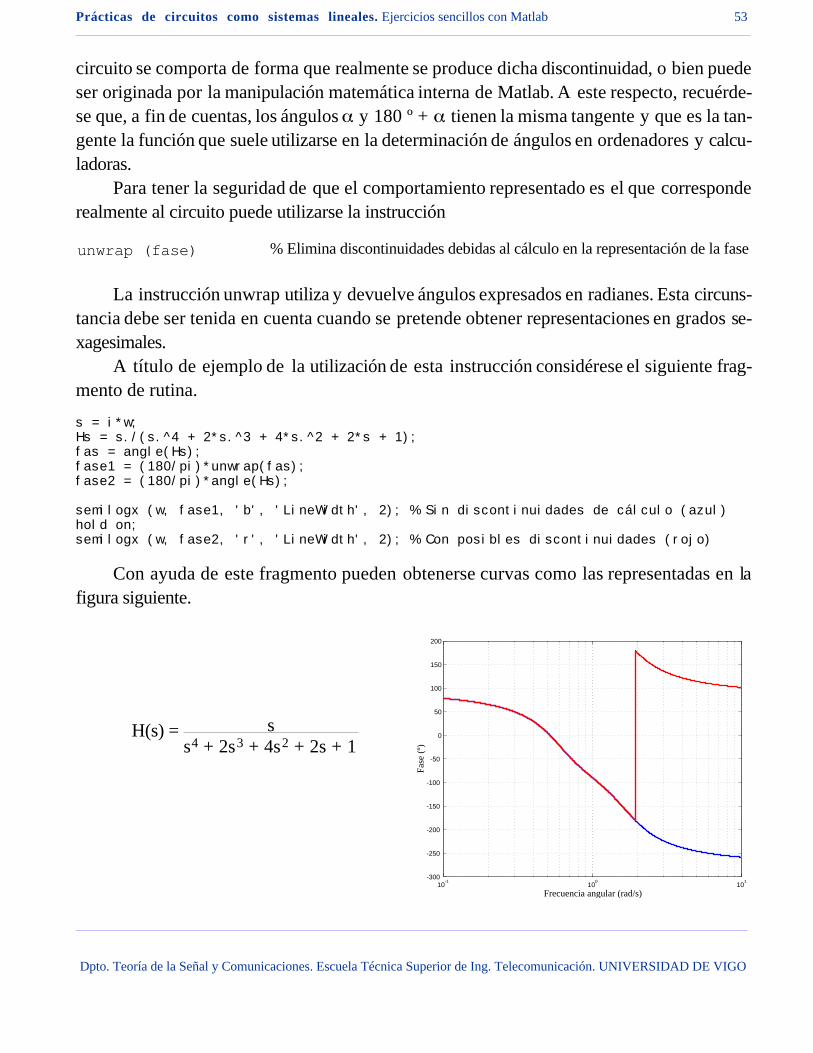
A título de ejemplo de la utilización de esta instrucción considérese el siguiente frag-mento de rutina.
s = i*w;Hs = s./(s.^4 + 2*s.^3 + 4*s.^2 + 2*s + 1);fas = angle(Hs);fase1 = (180/pi)*unwrap(fas);fase2 = (180/pi)*angle(Hs);
semilogx (w, fase1, 'b', 'LineWidth', 2); % Sin discontinuidades de cálculo (azul)hold on;semilogx (w, fase2, 'r', 'LineWidth', 2); % Con posibles discontinuidades (rojo)
Con ayuda de este fragmento pueden obtenerse curvas como las representadas en lafigura siguiente.
H(s) = ss4 + 2s3 + 4s2 + 2s + 1
10-1
100
101
-300
-250
-200
-150
-100
-50
0
50
100
150
200
Frecuencia angular (rad/s)
Fase
(º)
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 53
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO

Por otro lado, la figura siguiente muestra un caso en el que la discontinuidad es propiadel circuito y, por tanto, no puede ser eliminada con ayuda de la instrucción unwrap.
H(s) = 0.5s2 + 0.5s2 + 0.5s + 1
10-1
100
101
-100
-80
-60
-40
-20
0
20
40
60
80
100
Frecuencia angular (rad/s)Fa
se (
º)
Esta segunda figura ha sido obtenida con ayuda del mismo fragmento de rutina consi-derado anteriormente, aunque cambiando la instrucción que define la función de transferen-cia.
Determinación simultánea de módulo y fase
En los epígrafes anteriores hemos presentado rutinas que tratan separadamente la re-presentación de módulos y fases de funciones de transferencia de circuitos funcionando enrégimen sinusoidal permanente. Sin embargo, existe una instrucción que permite efectuardicha representación simultáneamente. Se trata de la instrucción
freqs (pol1, pol2, w) % Obtiene la variación con w de la fracción en la que pol1 y pol2% son los polinomios del numerador y el denominador, respectivamente
La rutina y la figura siguientes recogen un ejemplo de la utilización de esta instrucción.Como puede observarse, su uso implica una reducción del número de instrucciones necesa-rias (antes eran precisas abs y angle), así como una disminución del riesgo de equivocarseen la utilización de operadores precedidos de punto. Incluso, como se hace en la rutina si-guiente, no es necesario definir explícitamente los polinomios que constituyen el numeradory el denominador de la fracción a representar.
54 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO
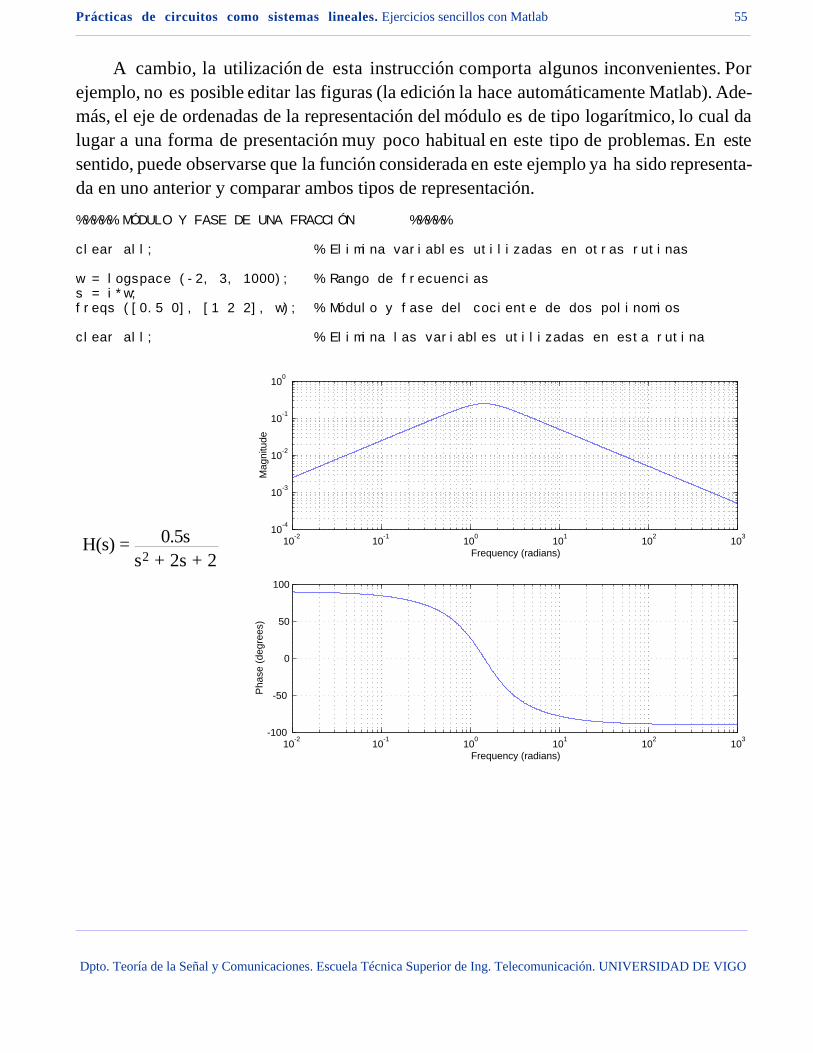
A cambio, la utilización de esta instrucción comporta algunos inconvenientes. Porejemplo, no es posible editar las figuras (la edición la hace automáticamente Matlab). Ade-más, el eje de ordenadas de la representación del módulo es de tipo logarítmico, lo cual dalugar a una forma de presentación muy poco habitual en este tipo de problemas. En estesentido, puede observarse que la función considerada en este ejemplo ya ha sido representa-da en uno anterior y comparar ambos tipos de representación.
%%%%% MÓDULO Y FASE DE UNA FRACCIÓN %%%%%
clear all; % Elimina variables utilizadas en otras rutinas
w = logspace (-2, 3, 1000); % Rango de frecuenciass = i*w;freqs ([0.5 0], [1 2 2], w); % Módulo y fase del cociente de dos polinomios
clear all; % Elimina las variables utilizadas en esta rutina
H(s) = 0.5ss2 + 2s + 2
10-2
10-1
100
101
102
103
-100
-50
0
50
100
Frequency (radians)
Pha
se (
degr
ees)
10-2
10-1
100
101
102
103
10-4
10-3
10-2
10-1
100
Frequency (radians)
Mag
nitu
de
Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab 55
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO

2.4 Ejercicios propuestos
Ejercicio 6
El circuito de la figura, en cuya representación se hautilizado notación fasorial,funciona en régimen sinusoidal permanente a unafrecuencia angular dada.Se desea obtener los valoresde los fasores de las corrientes de malla y de latensión en la fuente dependiente.
VG
R1
I1
C1
L1
aV1
- V1 +
C2
L2
M
L3I2 I3
R3 C3
VG = 0.5 - j1.5 V, a = 2, ω = 1 krad/s
R1 = 1 Ω, R3 = 1 Ω
L1 = 1 mH, L2 = 2 mH, L3 = 2.5 mH, M = 1 mH
C1 = 1 mF, C2 = 0.5 mF, C3 = 0.4 mF
Ejercicio 7
Obtener la transformada de Laplace (expresándola como cociente de dos polinomios)de la función
f(t) = 3δ(t) - 2te-5t + 4e-2tcos(8t)
Ejercicio 8
Obtener la transformada inversa de Laplace de la función
L(s) = 2s6 + 2.3s5 - 6.39s4 - 6.755s3 - 1.9925s2 - 0.0275s + 0.005
s6 + 3.1s5 + 2.55s4 + 0.725s3 + 0.05s2
Ejercicio 9
Representar la variación con la frecuencia del módulo y la fase de la función de trans-ferencia de un circuito funcionando en régimen sinusoidal permanente.
H(s) = 2×106s2 + 1018
(s + 106) (s2 + 2×106s + 1012)
56 Prácticas de circuitos como sistemas lineales. Ejercicios sencillos con Matlab
Dpto. Teoría de la Señal y Comunicaciones. Escuela Técnica Superior de Ing. Telecomunicación. UNIVERSIDAD DE VIGO









