Embed Size (px)
DESCRIPTION
Polynomials
Citation preview

16
CHAPTER II
POLYNOMIAL EQUATIONS
Finding roots of polynomials is the simplest problem which may be addressed byperturbation theory. Nevertheless, this type of problem may give us insight into properformulation of the perturbation problem, singular and regular cases, uniform andnonuniform solutions, rescaling coordinates and rescaling parameters. We will considerthe following examples adapted from Simmonds and Mann[10], pp. 3-17.
Regular Expansion. E 2.1: ConsiderXAMPLE
D #D Þ!" œ !Þ#(2.1)
with roots and . These roots may be found exactly by the quadratic formulaD D" #a b a b% %
and a perturbation method is not required. But our methods will also work forpolynomials of higher degree which are not solvable by the quadratic formula. In thiscase we will "cheat" and use the quadratic formula to verify our results. The followingdiscussion outlines the general method of attack in solving a problem using perturbationtechniques. First, we notice that the constant .01 is relatively small when compared with theother constants in the equation. If we replace it by zero, the equation is easily factoredwith roots
D Ð!Ñ œ !
D Ð!Ñ œ #Þ
"
#
Second, we create a family of problems intermediate between the easy, factorableproblem and the original problem by replacing with . Equation (2.1) now has theÞ!" %
form
D #D œ !# %(2.2)
and it represents a family of equations, one for each value of . When we have the% % œ !
factorable or so called problem and when we have the problem.reduced target% œ Þ!"
Third, we find an approximate solution to (2.2) assuming each root has a regularperturbation expansion of the form

17
DÐ Ñ œ + + + SÐ Ñ% % % %! " ## $(2.3)
then
D œ + #+ + #+ + + S# # # # $! "! " ! #a b ˆ ‰ ˆ ‰% % % %
substituting these expressions into 2.2 we geta b+ #+ + #+ + + #+ #+ #+ S œ !! "# # # # $
! " ! # ! " #% % % % % %ˆ ‰ ˆ ‰combining terms and using the fundamental theorem of perturbation theory
+ #+ œ ! Ê + œ !ß #
#+ + #+ " œ ! Ê + œ ß
#+ + + #+ œ ! Ê + œ ß
!#
! !
! " " "" "# #
! # # #"# # " "
) )
a ba b
%
%
therefore,
D œ S" "
# )
D œ # S Þ" "
# )
"# $
## $
a b ˆ ‰
a b ˆ ‰% % % %
% % % %
We see that these are the roots of the reduced equation when .% œ !
Fourth, whenever possible, say something about the error of theseapproximations. In this case we may compare our approximation when to the% œ Þ!"
actual roots of the target equation. Exact Roots:
D œ Þ!!&!"#&'
D œ "Þ**%*)(%
"
#
Approximate Roots:
D Þ!" œ Þ!!&!"#&
D Þ!" œ "Þ**%*)(&
"
#
a ba b
with error of . If the approximation is not good enough with six decimal digitsÞ!!!!!"
of accuracy then one may compute more terms of the root expansions.

18
This short example reveals an important aspect of regular perturbation problems.That is, these methods can only be applied when the target problem is close to a solvableproblem (the reduced problem). In fact, we see that the target problem is replaced by asequence of problems of which the reduced problem is the first. Since the solution of thereduced problem gives us the first term of the series solution it must be solvable for thetarget problem to be solvable by the regular perturbation method.
Singular Expansion. E 2.2: Find the roots of the singular problemXAMPLE
%D #D " œ !# .2.4a bSubstituting 2.3 we geta b
% % % % %ˆ ‰ ˆ ‰ˆ ‰+ #+ + #+ + + # + + + " œ !! "# # # #
! " ! # ! " #
collecting terms and using the fundamental theorem
#+ " œ ! Ê + œ
+ #+ œ ! Ê + œ
#+ + #+ œ ! Ê + œ
! !"#
!#
" "")
! " # ## "
"'
a ba b
%
%
so, we discover only one root!
D œ S" " "
# ) "'"
# $a b ˆ ‰% % % %
What are the characteristics of the missing root? We try to find the second root by usingthe quadratic formula. Applied to 2.4 , the quadratic formula givesa b
D œ D œ" " " "
" #a b a bÈ Èa b % %% %
% %.2.5
Taking we can expand in a power series in . Using the binomiall l " " % % %Èexpansion
È" œ " â" "
# )% % %#
and substituting into 2.5 we finda b

19
D œ S" "
# )
D œ S Þ# " "
# )
"
##
a b ˆ ‰
a b ˆ ‰% % %
% % %%
2
So, the missing root has the characteristic that it approaches infinity as ,D p !#a b% %
indicating a singularity in the model. The singularity arises when . We say that the% œ !
expansion for does not hold uniformly for all , but the expansion for isD D# "a b a b% % %
uniform. The form of suggests the change of variableD#a b%= % % %a b a ba b œ D Þ2.6
This change ( ) converts 2.4 torescaling coordinates a b= = %# # œ !
where the problem has been transformed from singular to regular behavior. The generalprocedure of singular perturbation theory is to extract the singular behavior of a solutionand by a change of variable and/or parameter to reduce the singular problem to a regularone. We have already solved this reduced problem. The solutions of example 2.2 were
= % % % %
= % % % %
"# $
## $
a b ˆ ‰
a b ˆ ‰œ S
" "
# )
œ # S Þ" "
# )
Restoring the original variable using 2.6 we obtaina bD œ S
" "
# )
D œ S Þ# " "
# )
"
##
a b ˆ ‰
a b ˆ ‰% % %
% % %%
2
where we have reproduced the roots of the singular problem by a change of variablewithout recourse to the quadratic formula. This is satisfactory since our new method willwork for polynomials of degree We also notice that it was necessary, by a change #Þ
of variable, to include negative powers of the parameter in the assumed form of ourperturbation expansion, 2.3 . is not a regular expansion because it is not expresseda b a bD# %
in positive integer powers of the expansion parameter as it must be to be of the forma b2.3 . As a result it does not approach a finite value as The change of variable%p!Þ

20
= % % %a b a b a bœ D worked for the specific case of 2.4 but will not work in general. In thegeneral case we will proceed by making the change of variable and allow= % % %a b a bœ DP
the specifics of the problem to determine a value for P which will transform singularbehavior to regular. This is a specific case of the method of .undetermined gauges
Undetermined Gauges. E 2.3: Find an expansion for the roots ofXAMPLE
D # D œ !# % % .2.7a bUsing expansion 2.3 in 2.7 we havea b a b
+ #+ + # + + S œ !!# #
! " ! "% % % % %a b ˆ ‰which gives us
+ œ ! Ê + œ !
#+ + #+ " œ ! Ê " œ !
!#
!
! " !a b%a contradiction. Thus, we find indicating that this equation has no roots of formno roots,a b2.3 . Consider the change of variable
D œa b a b% % = %P
where
= % % %a b œ + + + â! " ##
with Then 2.7 becomes+ Á !Þ! a b% = % % = % %2P P# " "a b a ba b # œ !.2.8
We solve for P by equating all possible pairs of gauge function exponents. Consider thethree possibilities that result.
i P P P
ii P P
iii P P
Ñ # œ " Ê œ "
Ñ " œ " Ê œ !
Ñ # œ " Ê œ "#
Case i would leave in the first and second terms and the singular behavior remains.Ñ %
Case ii and the singular behavior remains.Ñ Ê D œa b a b% = %

21
Case iii let P , then 2.8 becomesÑ œ "# a b
%= % % = % %
= % % = %
# $Î#
# "Î#
a b a ba b a b
a b # œ ! Ê
# " œ !.
2.9
Make a change of parameter ( )rescaling parameter
" %œ "Î#
to get rid of the fractional exponent. Then 2.9 becomesa b= " " = "#a b a ba b # " œ !.2.10
The regular expansion for in parameter = "
= " " " "a b ˆ ‰œ , , , S! " ## $
is substituted into 2.10 to geta b, #, , #, , , #, #, " S œ !! "# # # # $
! " ! # ! "" " " " "ˆ ‰ ˆ ‰ .
Collecting terms and using the fundamental theorem we find
, " œ ! Ê , œ "ß "
#, , #, œ ! Ê , œ "ß "
#, , , #, œ ! Ê , œ ß Þ
!#
!
! " ! "
! # " #"# # " "
# #
a ba b
"
"
Therefore,
= " " " "
= " " " "
"# $
## $
a b ˆ ‰a b ˆ ‰
œ " S"
#
œ " S"
#.
Restore original parameter %
= % % % %
= % % % %
""Î# $Î#
#"Î# $Î#
a b ˆ ‰a b ˆ ‰
œ " S"
#
œ " S"
#
and then restore original variable z to obtain the final result.

22
D œ S"
#
D œ S"
#
""Î# $Î# #
#"Î# $Î# #
a b ˆ ‰a b ˆ ‰
a b % % % % %
% % % % % .
2.11
We now see that in the case of singular problems it is necessary to include fractionalpowers of as well as negative powers in our perturbation expansions. These unknown%
gauge exponents are determined after substitution into the target problem. Since theregular series expansion will not work, the method of undetermined gauges is classifiedas a singular perturbation method. As a check on these results we see that the roots of thereduced equation are accurately represented by 2.11 when a b %p!Þ
We will now state and prove a theorem giving us a procedure to obtain anapproximation for any polynomial perturbation. We will then illustrate the method withan example. T 2.1: Each root ofHEOREM
T D œ + , - â + , - â D
â + , - â D œ !
%! !
!
a b ˆ ‰ ˆ ‰ˆ ‰a b % % % % % %
% % %
! "
8
! ! ! " " "# #
8 8 8# 8
2.12
is of the form
D œ Aa b a ba b % % %P2.13
where is a continuous, analytic function of for in some neighborhood of ,A !a b% % %
A ! Á ! − ß 4 œ ßá ß 8Þa b , and 0 Without loss of generality, is nonnegative and! !4 4
at least one of them is zero. Clearly we may also assume unless+ Á !5
+ œ , œ â œ !Þ5 5
First we find the of P which cause theorem 2.1 to beProof: proper valuessatisfied. Substituting 2.13 into 2.12 we havea b a b
T A œ U A V A œ !% % % ‘a b a b a b% %P
where
U A œ + + A â + A%! ! !a ba b % % %! " 8
! " 8 8 8P P .2.14
Note that 2.14 collects all the terms with the lowest power of for each power of .a b % A
Then if is a root of 2.12% %PAa b a bT A œ !% ‘a b% % %P for all

23
Ê U A œ !Þlim%
%Ä!
a ba ba b %2.15
If we are to satisfy , 2.15 implies that at least two of the exponents of the setA ! Á !a b a bI œ ß ß # ßá ß 8e f! ! ! !! " # 8P P P
must have identical, minimal values. We agree that if the coefficient of thenD œ !<
!< <T I does not appear in set . If we take a value of P for which there is only asingle minimal value in say P, then we may divide 2.12 by the gauge functionIß 5!5 a b%!55P and from 2.14 we havea b
lim%
!%
Ä!
5 55% % %5 P PT A œ + A ! œ ! ‘a b a ba b .2.16
Since is implied. This is a contradiction because if then itsA ! Á !ß + œ ! + œ !a b 5 5
gauge exponent would not be in the set So there must be more than one exponent inIÞ
I with identical minimal values for each proper value of P. We also see that if theexponent value is not minimal then the resulting limit 2.16 would be undefined.a b We proceed by finding all the proper values of P and their associated minimalexponents to form the set
e fa b a b a ba b P , P , P , .2.17 " " # # 4 4/ ß / ßá ß /
We use the elements of this set to rewrite 2.12 in the forma bX Aà œ T A œ X A L Aà% % %4 !4 4
/a b a b a bˆ ‰a b % % % %4 4P2.18
where is the part that has no 's and . By multiplying by X A L Aà œ ! T!4 4Ä!
/a b a b% % %lim%
% %4
and changing the variables from to we have extracted the of as aD A Tdominant part %
polynomial which is independent of . The solutions of for each willX X A œ ! 4!4 !4% a bgive values of which, when substituted into 2.13 , will give is the roots of 2.12 .A 8a b a b In general, the non-zero roots of the polynomials need not be regular.X A œ !%4a bThe 's in 2.12 and the associated proper values and exponents P , may be non-! a b a b4 4/
integer rationals. Thus, to obtain a regular expansion, new parameters must beintroduced. Let
% "œ ;4a b2.19
where is the least common denominator of the set of exponents P; ßá ß 8 Þ4 ! 8 4e f! !
Then from 2.18 we forma bV A œ X Aà"4 4
;a b a b" 4

24
where
X A œ X Aà Þ%4 4a b a b%The roots of are identical to those of , but the non-zero roots ofX A œ ! V A œ !% "4 4a b a bthe latter will have regular expansions in of the form"
A œ , , â , Sa b ˆ ‰" " " "! " RR R" .
E 2.4: Construct expansions for the roots ofXAMPLE
T D œ " # $ D "' D % D%a b a bˆ ‰ ˆ ‰a b % % % % % % % %# $ % # $ '2.20
Step 1.Set in 2.20 and determine the set of exponents .D œ A I%P a b
T D œ " # $ A "' A % A
I œ !ß " ß$ % ß # '
%a b a bˆ ‰ ˆ ‰e f
% % % % % % % %P P P" # $% % #' $ '
P P P
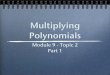
Step 2.Determine the pairs (P ) of proper values with associated exponents and4 4ß /
polynomials. Proper values and associated exponents may be determined by trial anderror or with the aid of a graph. A computer program illustrating the algorithm isincluded as Appendix I. Figure 1 shows a plot of the exponent lines. The intersectionsof minimal value may be found at P and Pœ œ $ &
% #Þ

25
3/4-5/2P
-13
1+P-3+4P
2+6P
Figure 1.Proper Values
Œ a b a bˆ ‰ˆ ‰
Œ a b a b a bˆ ‰ˆ ‰
$
%ß ! À X Aà œ " # $ A "' A
% A
ß"$ À X Aà œ " # $ A "' A&
#
% A
%
%
"(Î% # %
"$Î# $ '
#"$ #$Î# # %
$ '
% % % % %
% % %
% % % % % %
% %
Step 3.For each determine , where is the least common denominator of the set of4 ; ;4 4
exponents of . Make the change of parameter and list the associatedX œ%4;% " 4
polynomials .V A"4a b% " " " " "
" " "
% " " " " " "
" "
œ À V A œ " # $ A "' A
% A
œ À V A œ " # $ A "' A
% A
% % ( ) % %"
#' % "# '
# #' # #$ % # %#
# ' '
"
"
a b ˆ ‰ ˆ ‰ˆ ‰
a b ˆ ‰ ˆ ‰ ˆ ‰ˆ ‰
a b
a b
2.21
2.22
Step 4.The roots of are identical to those of but the non-zero roots of the latterX A V A% "4 4a b a bwill have a regular expansion in of the form

26
A œ , , â , Sa b ˆ ‰a b " " " "! " RR R" .2.23
Substitute 2.23 into , collect like powers of , use the fundamental theorema b a bV A œ !"4 "
and obtain a sequence of equations in . Solve in order for the unknowns, ß , ßá ß ,! " R
, ß , ßá ß , "! " R . From 2.2 we geta b" "', œ !
" '%, , , œ !
Ê
, œ œ / ß 5 œ "ß #ß $ß %" "
"' #
, œ ,"&
'%
!%
! !$ %
%
!5" 3 Î#
% !
Ê% a b 1
From 2.22 we geta b"', %, œ !
'%, , , #%, , , œ !
Ê
, œ % œ # " ß 5 œ &ß '
, œ ,$
$#
! !% '
! ! ! !$ % & '
# #
!5
% !
È a b
Step 5.Write down the roots via the change of variable .D ßá ß D D œ A" 'a b a b% % %P
D œ / " S ß 5 œ "ß #ß $ß %" "&
# '%
D œ # " " S ß 5 œ &ß '$
$#
55" 3 Î# (Î%
55 &Î# #
a b ” •ˆ ‰
a b a b ” •ˆ ‰
% % %
% % % %
a b 1