Embed Size (px)
Citation preview

2 - Principi di Meccanica e di Equilibrio

Cause dei fenomeni meccanici (quiete e moto) 1/2
− Nella Meccanica Classica (Meccanica Newtoniana) si assume che tra corpi diversi, così come tra le diverse parti di uno stesso corpo, si possono trasmettere reciproche interazioni, sia a distanza sia a contatto.
− Tali interazioni prendono il nome di forze.
− Le forze sono quantità vettoriali, caratterizzate da una retta d’azione, un modulo e un verso.
− Le forze possono essere concentrate o distribuite.

Cause dei fenomeni meccanici (quiete e moto) 2/2
− Nel caso delle azioni a distanza, si assume che due qualunque masse m1 e m2 esercitano l’una sull’altra la forza gravitazionale
F12 = F21 = hm1m2
r2
La forza gravitazionale è direttamente proporzionale al prodotto delle masse e inversamente proporzionale al quadrato della loro distanza. Inoltre, h è un coefficiente che prende il nome di costante di gravitazione universale.
La forza gravitazionale è sempre di mutua attrazione. In termini vettoriali si ha
F12 = hm1m2
r2 vers (P −Q) F21 = hm1m2
r2 vers (Q−P)

La forza peso
Tra le forze che agiscono sui corpi, di grande importanza è la forza peso, dovutaall’attrazione gravitazionale che la Terra esercita sul corpo. La forza peso si ottiene dalla relazione della forza gravitazionale
F = p = hMR2
m
in cui h è la costante di gravitazione universale, M ed R sono rispettivamente la massa e il raggio della Terra, m è la massa del corpo. Il coefficiente
hMR2
= g
di dimensioni [LT-2] è l’accelerazione di gravità, indicata con g = 9.81 ms-2. La relazione precedente assume quindi la forma
p =mg

Fondamenti della Meccanica Newtoniana (1684) 1/3
Prima legge di Newton (Principio d’inerzia)In assenza di forze applicate, un punto materiale permane in uno stato o di quiete (sta fermo rispetto all’osservatore), o di moto rettilineo uniforme.

Fondamenti della Meccanica Newtoniana 2/3
Seconda legge di NewtonPer effetto di una forza applicata F, un punto materiale acquista un’accelerazione a (variazione di velocità). Il coefficiente di proporzionalità è pari alla massa m del punto. Si ha cioè F =ma
Terza legge di Newton (Principio di azione e reazione)Quando due corpi interagiscono, la forza che il primo corpo esercita sul secondo è uguale e opposta alla forza che il secondo esercita sul primo.

Fondamenti della Meccanica Newtoniana 3/3
Definizione di forza− Interazione tra corpi materiali− Causa che altera lo stato di quiete o di moto rettilineo uniforme, o che provoca deformazioni
Definizione di massa− Quantità di materia di un corpo− Attitudine ad attrarre o a farsi attrarre da un altro corpo− Capacità di un corpo di perseverare nel suo stato corrente, sia esso di quiete o di moto
uniforme lungo una linea retta (resistenza/inerzia a lasciarsi accelerare)
Definizione di equilibrioL’equilibrio di un punto materiale va inteso come mantenimento della quiete. Pertanto si ha che:condizione necessaria e sufficiente per l’equilibrio di un punto materiale è che sia nulla la risultante di tutte le forze agenti su di esso, cioè
R = 0

Momento di una forza rispetto a un polo
Il momento di una forza rispetto a un polo non varia se si fa scorrere la forza lungo la sua retta d’azione. Non mutano, infatti, né il modulo della forza, né il braccio, né il verso della rotazione associata.
Si definisce momento di una forza F rispetto a un polo O la quantità
MO = ± F d
Il momento si considera positivo se la forza “gira” in senso antiorario rispetto al polo.

Equivalenza di sistemi di forze
Sistemi di forze equivalentiDue sistemi di forze si dicono equivalenti quando sono ottenibili l’uno dall’altro con sole operazioni sulle forze. I due sistemi sono sostituibili l’uno all’altro per quanto riguarda la quiete o il moto del sistema materiale su cui agiscono. Si può dimostrare che due sistemi di forze equivalenti hanno lo stesso risultante R e lo stesso momento M rispetto a un qualunque polo (condizione necessaria e sufficiente).
Condizione necessaria e sufficiente affinché due sistemi di forze siano equivalenti è che abbiano ugual risultante e ugual momento rispetto a un punto arbitrario O.

Equilibrio di un corpo rigido: equazioni cardinali della statica 1/2
Si dice che un sistema materiale è in equilibrio quando è in quiete rispetto a un sistema di riferimento inerziale.
Si assumono validi i seguenti postulati della statica:
1. Se su un sistema materiale in quiete non agisce nessuna forza esterna, il sistema persevera nel suo stato di quiete.
2. Se agisce una sola forza esterna il sistema non persevera nel suo stato di quiete.
3. Se agiscono due forze esterne, il sistema persevera nel suo stato di quiete se e solo se le due forze sono opposte e allineate.
Ne consegue che:Un corpo rigido è in equilibrio sotto l’azione di un sistema di forze se e solo se risulta
R = 0 MA = 0

Equilibrio di un corpo rigido: equazioni cardinali della statica 2/2
…
In altre parole:
Condizione necessaria e sufficiente per l’equilibrio di un corpo rigido è che il sistema di forze agente su di esso abbia risultante nullo e momento nullo rispetto a ogni punto. Tali equazioni prendono il nome di equazioni cardinali della statica.
R = 0 MA = 0
OsservazioneLa seconda equazione impone che il momento sia nullo rispetto a un punto arbitrario. Infatti, se la prima equazione è soddisfatta il sistema equivale a una coppia che ha momento costante rispetto a un qualunque punto.

Vincoli interni e gradi di libertà 1/2
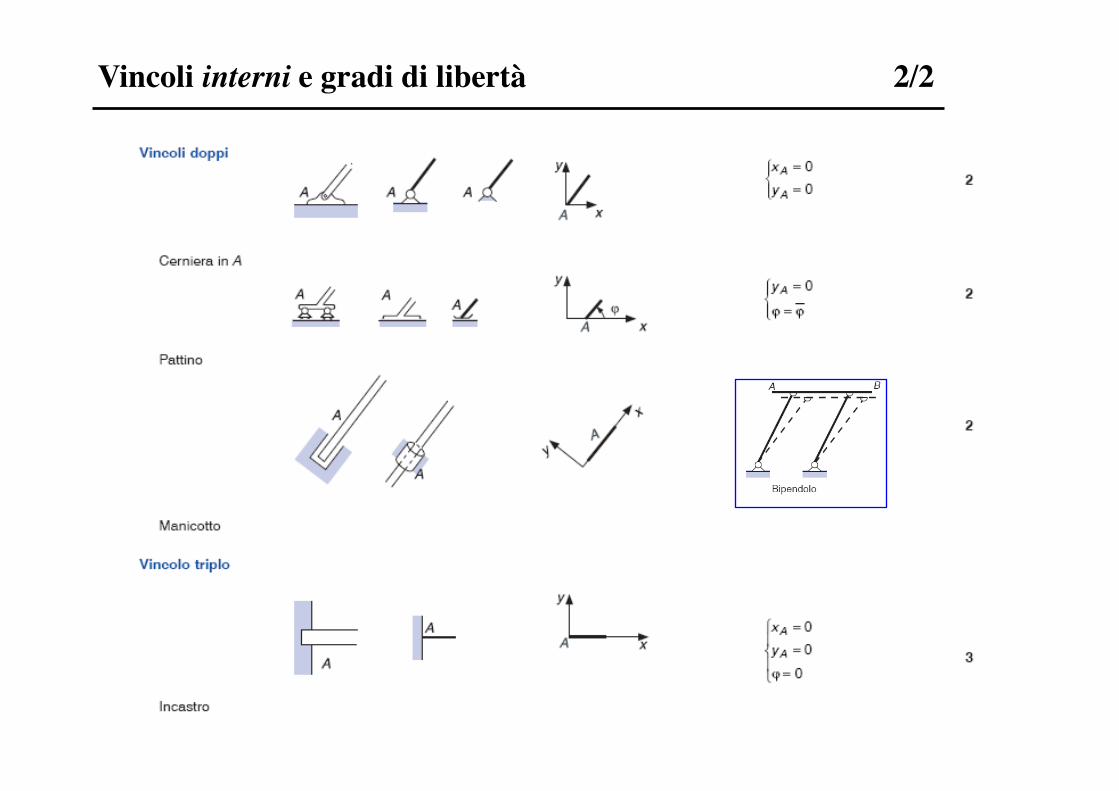
Vincoli interni e gradi di libertà 2/2

Vincoli interni e strutture articolate

Sistemi strutturali ipostatici, isostatici e iperstatici
Si consideri un sistema articolato di corpi rigidi, variamente vincolato esternamente e internamente. Se t è il numero dei corpi rigidi, il numero complessivo dei gradi di libertà del sistema è pari a n = 3 ⋅ tSia inoltre v il numero complessivo dei gradi di vincolo, che si ottiene sommando algebricamente i gradi di molteplicità di tutti i vincoli presenti, esterni e interni.Si possono presentare i seguenti casi:
v − n < 0
v − n = 0
v − n > 0
sistema ipostatico o labile
sistema isostatico
sistema iperstatico
Osservazioni− I sistemi strutturali ipostatici o labili sono denominati anche meccanismi o catene
cinematiche.− I sistemi strutturali isostatici o iperstatici non hanno possibilità di spostamento né al finito, né
nell’infinitesimo e sono pertanto equilibrati per ogni condizione di carico.

Vincoli in condizioni di iperstaticità
Per sistemi iperstatici di corpi rigidi le equazioni di vincolo sono maggiori del numero dei gradi di libertà e, pertanto, non risultano tra loro indipendenti. Ciò significa che alcuni vincoli verrebbero a togliere alla struttura gradi di libertà già tolti da altri vincoli. In questo senso si dicono sovrabbondanti. Tutto questo, tuttavia, non significa che essi siano inutili nei confronti del comportamento fisico (geometrico e statico) della struttura. È il modello rigido che non riesce ad apprezzare l’aiuto che la struttura riceve dai vincoli non “essenziali”. Solo tenendo conto della deformabilità della struttura si riuscirà a determinare il contributo dei vincoli aggiuntivi.

Vincoli e reazioni vincolari 1/3
Oltre a una funzione geometrica, i vincoli assolvono anche a una funzione statica. Sono in grado, cioè, di trasmettere una forza all’elemento strutturale che vincolano, forza che viene detta reazione vincolare.Dal punto di vista grafico, ogni reazione vincolare è caratterizzata da una retta d’azione, un modulo e un verso. Dal punto di vista analitico, dalle sue componenti rispetto a un sistema di riferimento cartesiano ortogonale.Nel seguito saranno considerati solo vincoli perfetti (impediscono del tutto alcune componenti di spostamento) e lisci, cioè privi di attrito (consentono senza limitazioni le componenti di spostamento non impedite).
OsservazioneSi consideri un sistema strutturale isostatico o iperstatico, cioè privo di gradi di libertà, inizialmente in quiete. Si può osservare che l’applicazione di un sistema di forze non equilibrato non altera la condizione di quiete, perché il sistema non può “muoversi”. Di conseguenza, sul sistema devono agire anche altre forze che, sommate a quelle direttamente applicate, costituiscono un sistema equilibrato, che soddisfa, cioè, le equazioni cardinali della statica. Queste forze non possono che essere trasmesse dai vincoli, e costituiscono quelle che si dicono reazioni vincolari.

Vincoli e reazioni vincolari 2/3

Vincoli e reazioni vincolari 3/3

Il calcolo delle reazioni vincolari – Metodo analitico
Si è osservato in precedenza che un sistema di forze equilibrato soddisfa le equazioni cardinali della statica
R = 0 M = 0
⎧⎨⎩
Per un sistema privo di gradi di libertà sollecitato da un sistema di forze esterne, in tali equazioni compaiono come incognite le reazioni vincolari. Per un sistema isostatico a vincoli ben disposti, le equazioni cardinali della statica, scritte per ogni tratto rigido costituente il sistema, sono pari al numero delle incognite reazioni vincolari e consentono, quindi, la loro determinazione. Nel caso piano, per ogni tratto del sistema le equazioni cardinali della statica possono essere scritte in forma scalare come segue
Rx = 0Ry = 0
Mz = 0
⎧
⎨⎪⎪
⎩⎪⎪
Tali equazioni prendono rispettivamente il nome di equazione di equilibrio alla traslazione nella direzione dell’asse x, equazione di equilibrio alla traslazione nella direzione y, equazione di equilibrio alla rotazione (attorno a un qualunque punto).

Esempio
Rx = 0 Ry = 0
MA = 0
⎧
⎨⎪⎪
⎩⎪⎪
⇒
X1 −2
2X3 = 0
X2 +2
2X3 − P = 0
22X3ℓ− P
2ℓ3
= 0
⎧
⎨
⎪⎪⎪⎪
⎩
⎪⎪⎪⎪
⇒
X1 =2P3
X2 = P3
X3 =4P
3 2
⎧
⎨
⎪⎪⎪
⎩
⎪⎪⎪

Il calcolo delle reazioni vincolari – Metodo grafico 1/2
Nel caso piano, la prima equazione cardinale della statica (R = 0) può essere soddisfattase la poligonale di tutte le forze attive e reattive è chiusa. Si può quindi affermare che:
Per un sistema piano in condizioni di equilibrio la poligonale delle forze attive e reattive è chiusa.
Per quanto riguarda la seconda equazione cardinale della statica (M = 0) bisogna distinguere alcuni casi, in base al numero delle forze attive e reattive.
Due forzeIn condizioni di equilibrio le forze devono essere opposte (R = 0) e allineate (M = 0).

Tre forzeCondizione necessaria affinché tre forze siano in equilibrio è che le loro rette d’azione siano concorrenti in un punto.
OsservazioneLa condizione precedente è solo necessaria, ma non sufficiente. Affinché la condizione sia anche sufficiente occorre che il poligono che connette le forze attive e reattive sia chiuso. Pertanto
Condizioni grafiche di equilibrio sono la chiusura della poligonale delle forze e del poligono funicolare.
Il calcolo delle reazioni vincolari – Metodo grafico 2/2

Esempio 1
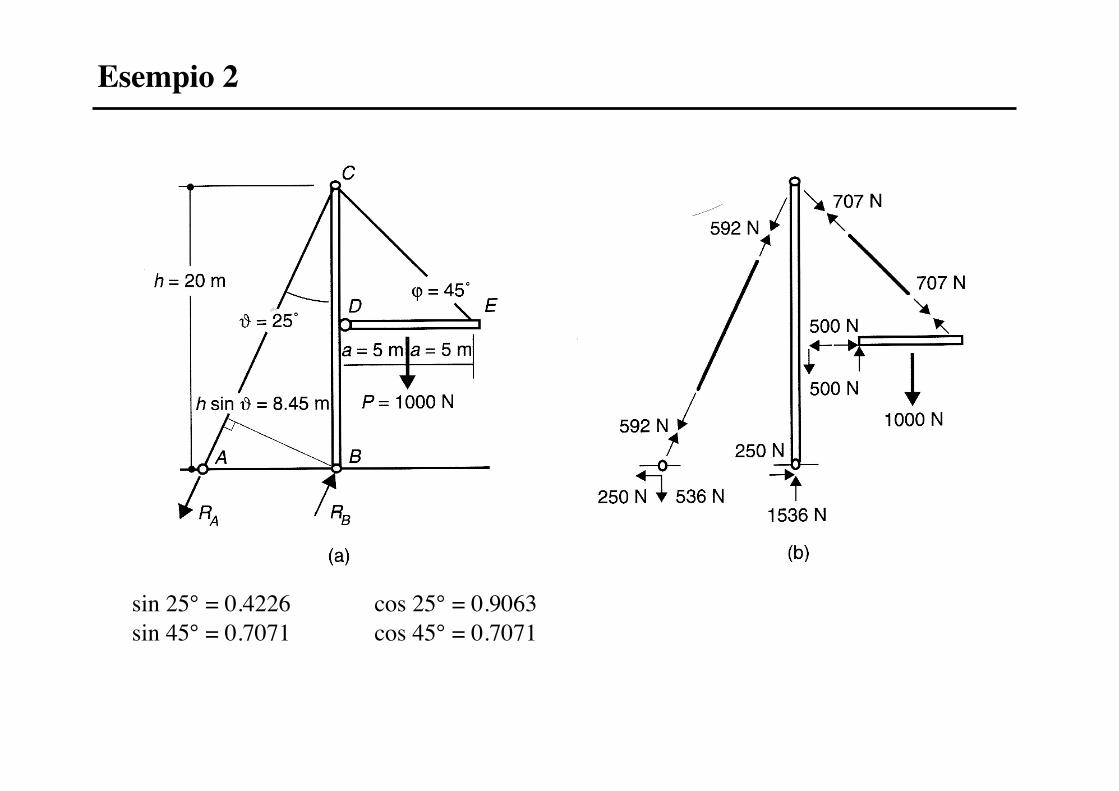
Esempio 2
sin 25° = 0.4226 cos 25° = 0.9063sin 45° = 0.7071 cos 45° = 0.7071

Momento ribaltante

Trazione e compressione (sforzo normale)

Momento flettente e taglio

Risposte sperimentali dei materiali: la prova di trazione di un provino di materiale metallico
La prova è eseguita in condizioni di temperatura e pressione costanti, sottoponendo a trazione monoassiale un provino cilindrico di materiale metallico, avente sezione circolare di raggio iniziale r0 e lunghezza iniziale . 0Generalmente, la prova viene condotta a controllo di spostamento, con una macchina che impone uno spostamento agli estremi del provino e che rileva, in corrispondenza di ogni lunghezza , il valore della forza agente F. Il modo più semplice di rappresentare la risposta del materiale è quello di riportare in un diagramma la tensione (normale) media nominale presente nel provino
Δ
σ =FA0
in funzione della deformazione nominale assiale
ε =− 00
dove A0 e sono l’area della sezione trasversale e la lunghezza iniziali del provino.
0

Deformazione elastica

Deformazioni elastica e plastica
E = 204000 Mpa (acciaio)E = 20700 Mpa (calcestruzzo)E = 11000 Mpa (legno)
Legge di Hookeσ = Eε

Materiali duttili e fragili
!T !
"T
"
"C
!C





























