Embed Size (px)
Citation preview

328 Int. J. Vehicle Design, Vol. 46, No. 3, 2008
Copyright © 2008 Inderscience Enterprises Ltd.
How a rear steering system may improve motorcycle dynamics
Fabiano Maggio and Vittore Cossalter* Department of Mechanical Engineering, University of Padova, Via Venezia 1, 35131 Padova, Italy E-mail: [email protected] E-mail: [email protected] *Corresponding author
Abstract: This research investigates how motorcycle dynamics may be improved by applying a steering system on the rear wheel. The study is carried out using a widely validated multi-body model of motorcycle and rider. Two types of rear steering systems are compared: a self-steering wheel coupled with a spring-damper assembly and a controlled steering wheel, whose steering angle is governed accordingly to a first-order relationship between front and rear steering angle. In general, any rear steering system transfers energy from weave mode to wobble mode. Thus, both solutions stabilise high-speed weave, but increase instability when braking. The passive system shows unexpected reactions when accelerating in cornering condition, whereas the active system is almost neutral.
Keywords: motorcycle stability; weave; wobble; 2WS motorcycle; steering system.
Reference to this paper should be made as follows: Maggio, F. and Cossalter, V. (2008) ‘How a rear steering system may improve motorcycle dynamics’, Int. J. Vehicle Design, Vol. 46, No. 3, pp.328–346.
Biographical notes: Fabiano Maggio received his MS Degree in Mechanical Engineering from the University of Padova, Italy, in 2001 and his PhD Degree in Motorcycle Engineering from the University of Padova, Italy, in 2005. Currently, he is working for a CAE company. His research interests include dynamics of motorcycle, with particular emphasis on stability-related problems.
Vittore Cossalter received his MS Degree in Mechanical Engineering from the University of Padova, Italy, in 1971. He has been a Full Professor of Applied Mechanics since 1986. The design of mechanisms for automatic machines, mechanical vibrations, simulation of mechanical systems, and dynamics of motorcycle have been among his areas of research. He has written three books and more than 100 papers on motorcycle dynamics.
1 Introduction
The idea of using rear steering wheels to improve control and stability comes from the automotive world. The first known example dates back to 1938, when Mercedes built the cross-country military vehicle 170VL having a counter steering rear axle. In 1962,

How a rear steering system may improve motorcycle dynamics 329
two engineers from Mazda investigate stabilising effects of self-steering wheels mounted on the rear axle. In 1983, Mazda presents a car prototype (MX-02) equipped with controlled rear steering wheels, where the rear steering angle is a function of driving parameters such as speed and front steering angle. In 1985, Nissan releases the first production 4WS (four wheels steering) road car with rear self-steering wheels. Much more sophisticated is the 1986 Honda Prelude, equipped with a pure mechanical system that produces a variable steering ratio between front and rear wheels. Western car companies never showed interest in 4WS technologies until the end of 1990s. Only recently, several US manufacturers have equipped their trucks, vans, and sport-utility vehicles, with steering wheels on the rear axle, using electric actuators and computerised controls developed by Delphi.
From the automotive studies it is possible to extract important guidelines that characterises the 4WS technology. At low speed the control of the rear steering system has to provide a counter-steering action in order to reduce the cornering radius and make any slow manoeuvre easier. On the contrary, at high speed, rear and front wheels have to steer in phase, in order to reduce yaw rate and to achieve a better stability.
In the motorcycle world, the possibility of making the rear wheel of steering type has already been considered as demonstrated by many documents available in the world patent database. Nevertheless, a very few relevant papers can be found in the scientific literature, meaning that poor efforts have been spent for this research topic. The 2WS (two wheels steering) technology can potentially improve the motorcycle dynamics, but manufacturers have always preferred simpler, safer and cheaper solutions. It is worth to point out that motorcycles, if compared to cars, are intrinsically much more sensitive to the effects of a rear steering system, because of their smaller yaw inertia and shorter wheelbase. This makes the development of a reliable 2WS technology more complex.
The first work has been carried out at University of Tokyo by Fujioka and Matsui (1993). Their motorcycle model is based on a simple 4 DOF model (Sharp, 1971), to which they add the rear steering capability by imposing a constant ratio between rear and front steering angle. The paper includes stability analysis, impulse response analysis, and transfer function analysis in straight running at constant speed. Calculations are repeated for several values of the steering ratio and rear caster angle. Results show that assigning a positive steering ratio the weave stability increases, whereas the wobble stability decreases. The rear steering axis should be inclined as the front one, but variations of the rear caster angle have moderate effects on the stability.
Later, two researchers from Honda (Hikichi and Tezuka, 1995) proposed a work about the stabilising effects of a self-steering rear wheel. The system described in the paper is designed to damp weave mode in straight running and cornering. The authors assume that weave oscillations are sustained by the sideslip force on the rear tyre, and therefore better stability can be achieved reducing the sideslip angle. This principle is applied to stabilise a 400 cc road sport motorcycle, whose rear wheel is mounted on an inclined rear steering head in order to generate a positive trail. With this geometry, the lateral tyre force has an aligning effect that tends to reduce the sideslip. Steering motion is controlled and limited using a spring-damper assembly. The paper presents both simulations and experimental results, meaning that Honda has already built a 2WS prototype. Results show a noticeable improvement of the weave stability, but it must be remarked that the testers did not appreciate the large behavioural changes due to the additional steering system.

330 F. Maggio and V. Cossalter
A 2WS system has also been studied at University of Padova (Cesari, 2000), in combination with an optimal riding control. In this work, a multi-body model of a sport motorcycle is equipped with an active rear steering system. The rear steering angle is assumed to be a function of the front steering angle, through a first order differential equation. This active system has good stabilising effects on the weave mode, but has also the potential to improve motorcycle performances. Several race simulations are carried out using an optimal riding control (da Lio, 1997; Cossalter et al., 1998, 1999a). It is found that the 2WS motorcycle completes the lap in less time than the corresponding conventional vehicle.
This work presents a detailed study on the dynamics of motorcycles equipped with rear steering devices. One passive system and one active system are analysed and compared in terms of stabilising action and handling effects. An original criteria, based on the roll kinetic energy, is proposed to calculate a stability index. This makes possible an objective comparison of system performances independently from the modes (Cossalter et al., 2002a; 2004; Maggio, 2001) that are excited when oscillations occur. Handling properties are then analysed by performing typical manoeuvres, in order to better understand how different is the 2WS motorcycle behaviour with respect to a conventional vehicle.
The research is carried out using multi-body technology (DADS). A detailed model of motorcycle and rider is created accordingly to the state-of-art guidelines (Sharp and Limebeer, 2001; Cossalter and Lot, 2002; Sharp et al., 2003; Cossalter et al., 2004) and enriched with proper controls to allow rider displacements with respect to the chassis. Particular attention is spent for the tyre section, because tyres strongly affect the vehicle dynamics (Takahashi et al., 1984; Cossalter et al., 2002b). The tyre model implemented for this research is a simplified version of the deformable tyre developed at University of Padova (Lot, 2004). A dedicated block of the control system is written to govern the rear steering system in both passive and active configuration.
The virtual model of the conventional motorcycle (i.e., without any rear steering device) has been deeply validated using experimental data of typical manoeuvres, such as lane change, steady cornering, and slalom. On the contrary, the model of the 2WS motorcycle could not be validated because there were not resources to build and test a prototype with two steering wheels. The reliability of this work is based on the assumption that the agreement between virtual model and real motorcycle is the same without and with rear steering system. Beyond doubt, a pure virtual analysis can not be considered exhaustive, but results could be use as directions to design a prototype.
Existent analyses of 2WS systems (Fujioka and Matsui, 1993; Hikichi and Tezuka, 1995; Cesari, 2000) show the benefits of the 2WS technology on light motorcycles, having short wheelbase, stiff chassis, and a few inertia. This paper analyses the effects of the rear steering system on large, heavy weight motorcycle, which has, on the whole, opposite characteristics. Moreover, using a different approach to analyse stability, this work becomes a review of existing material.
Section 2 provides a brief description of the motorcycle and rider models, including the riding control equations. Section 3 deals with the validation of the baseline model. Section 4 presents the 2WS technology and describes, in particular, the active system. Section 5 deals with the stability analysis of the 2WS motorcycles, providing a detailed description of the rating criteria. In Section 6, active and passive system are analysed in terms of handling response, whereas the Section 7 draws the conclusions.

How a rear steering system may improve motorcycle dynamics 331
2 The multi-body model
2.1 The motorcycle model
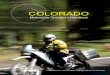
The motorcycle multi-body model used in this research is developed following the guidelines given by Cossalter and Lot (2002, 2003b). It consists of seven rigid bodies connected each other in order to reproduce the natural degrees of freedom of a real motorcycle. The main body is the rear frame, which includes chassis, engine, tank, saddle and bags. The second body, in order of importance, is the front frame, which includes handlebars, fork brackets, windshield, lights, and the upper part of the telescopic forks. The swinging arm and the rear unsprung masses form together the third body, whereas the lower section of the forks and the attached unsprung masses form together the fourth one. Engine rotating parts are taken into account through an equivalent flywheel body. The last two bodies of the model are, of course, the wheels. Figure 1 shows that this multi-body system has twelve degrees of freedom.
Figure 1 Degrees of freedom of the motorcycle model
The influence of structural flexibilities on the dynamical properties of the vehicle is not negligible (Sharp, 1974; Kane, 1978; Verma et al., 1980; Sharp and Alstead, 1980; Spierings, 1981), except for those motorcycle having high-stiff chassis (Cossalter et al., 2002a). Since the research is carried out for a heavy, low-stiff motorcycle, the virtual model has been enriched with features that reproduce the main body compliances. A lumped-stiffness approach has been followed to simplify the modelling process. As shown in Figure 2, the main bodies are split in sub-bodies that are then connected using rotational spring-damper elements. The scheme is the same for forks and swinging arm and consists of one rotational spring to reproduce the torsional compliance and two rotational springs to describe the lateral flexibility. By choosing opportune values of the stiffness, the model reproduces correctly the lateral displacements and the rotation of the extreme sections to which the wheels are attached. One more rotational spring-damper

332 F. Maggio and V. Cossalter
element, not included in Figure 2, is inserted between the swingarm pivot and the steering column to describe the torsional compliance of the chassis.
Figure 2 Structural flexibilities
The transmission of the engine power to the rear wheel is obtained through a chain drive. The engine rotating bodies are condensed in a single equivalent flywheel whose angular rate is a function of both the engaged gear and running speed. The model also takes into account the aerodynamic effects such as drag, lift and lateral forces.
Since dynamics of motorcycles strongly depends on tyres (Takahashi et al., 1984; Cossalter et al., 2002b; de Vries and Pacejka, 1998), an advanced tyre model (Lot, 2004; Pacejka and Bakker, 1991; de Vries and Pacejka, 1997; Berritta et al., 2002) has been implemented in DADS. It takes into account the geometry of the carcass cross section to predict the position of the contact point and the variability of the relaxation length with the camber angle to adjust the tyre response. Detailed measurements of sideslip and camber forces (Cossalter et al., 2003a) have been taken to fit the model with reliable data.
2.2 The rider model
The rider model completes the multi-body system. It consists of 15 rigid bodies, having the inertial properties of the human body parts (NASA, 1978; Silva et al., 1997). As shown in Figure 3, not all of the rider DOF are included in the model, because a too sophisticated control would be needed to correctly reproduce the rider mobility. The arms are fixed to the thorax in the position they normally have in straight running configuration (elbow and wrist rotations are inhibited). As consequence the upper part of the rider behaves as a single rigid body with appropriate inertial properties. Two revolute joints are inserted respectively between head and thorax (neck) and between thorax and pelvis (waist), in order to allow relative pitch motions. The legs are attached to the pelvis using spherical joint (hips), whereas the knees are reproduced using revolute joints. Finally the feet are attached to the legs using spherical joints (ankles).

How a rear steering system may improve motorcycle dynamics 333
Figure 3 Rider model
All of the joints, except the waist, are coupled with spring-damper elements that allow limited relative rotations, with the aim of reproducing the relaxed behaviour of the human body. The waist joint is coupled with a controlled motor; it can be used as normal spring-damper (i.e., in straight running) or it can apply a desired torque between pelvis and thorax (i.e., when leaning).
The rider interfaces with the motorcycle in three points. The two feet are rigidly fixed to the footrests, whereas the saddle contact is modelled using a translational joint. In normal running condition a spring-damper assembly limits the lateral displacement of the rider with respect the saddle. For specific manoeuvres the spring-damper is disabled and two forces are applied from the footrests and the hips. These forces reproduce the action of the legs when the rider moves with respect to the motorcycle. Hands are not attached to the handlebars, since the steering torque is applied through a rotational motor mounted on the steering column.
2.3 The control system
The motorcycle model is governed using a roll-based PID control system, which calculates the steering torque, the leg forces, and the waist torque. The steering torque comes from the following expression:
0( ) [ ( ) ( )] ( ) [ ( ) ( )] dt
t
ST P d D I dT t K t t K t K t tϕ τ ϕ ϕ ϕ ϕ= + − + + − (1)
where KP, KD and KI are respectively the proportional, the derivative and the integral gain, ϕd is the desired roll angle, ϕ is the actual roll angle, and τ is a time constant that represents the response delay of the motorcycle. In the same way the leg force and the waist torque are calculated:
2 2 2( ) [ ( ) ( )] ( )P d DF t K c t y t K y tϕ τ= + − + (2)
3 3 3( ) [ ( ) ( )] ( )W P d DT t K c t t K tϕ τ θ θ= + − + (3)

334 F. Maggio and V. Cossalter
where y is the rider’s pelvis lateral displacement and θ is the rider’s torso leaning angle. The remaining coefficients c2 and c3 are additional gains used to switch the actuators from active to passive type. Indeed, if c2(c3) is null, the corresponding expression returns the force (torque) generated by a linear (rotational) spring-damper assembly.
3 Experimental tests and model validation
A production model of a large motorcycle has been equipped with dynamical and kinematical sensors to collect data for the validation tasks. The chassis orientation is measured using an inertial platform with three orthogonal gyrometers (max bias error equal to 0.02 deg/s, and max linearity error equal to 0.4 deg/s). The suspension travels are measured using linear potentiometers, and the angular speed of the rear wheel is acquired using a frequency sensor. The steering torque meter is designed and built following the guidelines given by Bortoluzzi et al. (2000).
The instrumented motorcycle has been tested by three different riders, performing typical manoeuvres such as lane change, slalom and steady cornering. The riders were asked to behave as more neutral as they could, in order to reduce the influence of the rider’s body motion on the motorcycle dynamics.
The roll angle and the speed coming from the experimental tests are used as input signals for the control system of the multi-body model. A few preliminary simulations are necessary to tune the control gains, which mainly depends on the forward speed.
The validation is then carried out by comparing steering torque, yaw rate, suspension travels, and front steering angle of the multi-body model with the same quantities previously measured. In general, a very good agreement is found. Figures 4 and 5 show the steering torque comparison for two of the performed manoeuvres. The superimposition of the roll angle curves proves the efficiency of the control system, whereas the small difference between experimental and calculated steering torque curves proves the dynamical reliability of the model. For these manoeuvres the rider is kept in central position over the saddle and no leaning angle is imposed to the torso. A good validation is also obtained for the steady-cornering manoeuvre, which is the most sensitive test because of the small values of the steering torque (Bortoluzzi et al., 2001; Cossalter et al., 1999b). For the steady-cornering simulations the rider is slightly moved towards the external side of the curve, after having observed a similar trend during the experimental tests.
Figure 4 Lane change to right (width = 5 m, length = 20 m, speed = 14 m/s)

How a rear steering system may improve motorcycle dynamics 335
Figure 5 Slalom (cone distance = 21 m, speed = 16 m/s)
4 The 2WS motorcycle
The validated motorcycle-rider model is modified by mounting a rear steering head to which the rear wheel is then attached to (see Figure 6). The power and the braking torques are transmitted to the wheel using a constant velocity joint, whereas a controlled motor is coupled with the revolute (steering) joint to govern the steering angle. The inclination of the rear steering head with respect to the swinging arm is fixed and the value is chosen in order to produce a rear caster angle almost equal to the front one ε = 25 deg in static condition. With this assumption, the rear trail becomes tr = 0.15 . Obviously, caster angle and trail slightly change as the suspension deflects and the swingarm rotates.
Figure 6 Rear steering head geometry
4.1 Passive system
With this solution, the rear wheel can steer either to left or right, depending on how the resultant of the tyre forces is oriented. It has been demonstrated (Hikichi and Tezuka, 1995) that, assuming a positive trail, the rear wheel automatically steers to the direction that reduces the sideslip angle. The steering joint, which is of revolute type, is coupled with a rotational spring-damper element that has the function of limiting the steering angle and preventing unstable oscillations. The passive system works as an auto-adjusting sideslip control. In this research we investigate how the characteristics of both the spring and the damper (preload MPS, stiffness KPS, and damping coefficient CPS)

336 F. Maggio and V. Cossalter
affect the dynamic behaviour of the motorcycle. At the same time we want to identify the coefficient set that leads to the maximum stability in any running condition.
4.2 Active system
With the active system, the rear wheel is no longer free to steer under the action of external forces. Indeed, an actuator imposes the rear steering angle accordingly to a chosen function. The active system is implemented in DADS using a rotational driver and the necessary torque (the rear steering torque) is automatically calculated by the solver. The goal is to identify a controlling function that improves both stability and handling capabilities of the motorcycle.
An original control, which is somehow inspired by the principles of the 4WS systems used in the automotive world, is presented here. It is based on a first-order differential equation that makes the rear steering angle dependant on the front steering angle only:
dddt dt
( )( )( ) 1
frr i r f
r ir
f
k k
k i kiTF ii i
δδτ δ τ δ
ω τδ ωωδ ω ω τ
+ = +
+= =
+
(4)
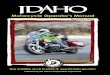
where δr is the rear steering angle, δf is the front steering angle, τ is a time constant, ki and kr are chosen ratios. In particular, kr is the ratio of rear to front steering angle in steady-state condition, whereas ki represents the ratio of rear to front steering rate when a perturbation starts from straight running conditions. The differential equation can be better understood if analysed in frequency domain. The module of the transfer function represents the ratio of rear to front steering angle, whereas the phase returns information about the delay of the response. Figure 7 shows that playing with the coefficients it is possible to obtain very different behaviours of the rear steering system.
Figure 7 Transfer functions for the active system control

How a rear steering system may improve motorcycle dynamics 337
By assuming ki = 0 the transfer function works as low pass filter. This means that only slow variation of the front steering angle are transmitted to the rear steering driver. The time constant τ determines the cut frequency, whereas the coefficient kr governs both the module and the phase of the function at low frequency. By choosing kr negative, we obtain a counter-steering behaviour that may become useful to perform parking manoeuvres and very slow severe cornering.
With kr = 0 the transfer function works as high pass filter. This means that only perturbations above the cut frequency are transmitted to the rear steering system. The coefficient ki governs the module and the phase of the function at high frequency. By choosing ki positive and less than one, we force the rear steering system to copy the front steering angle with reduced amplitude. This may become useful to increase the weave stability.
Finally, we may use the transfer function with kr negative and ki positive, obtaining a frequency-dependant behaviour. For low-frequency the rear wheel steers toward the opposite side of the front wheel (counter-steering behaviour), whereas, for high-frequency inputs, the rear wheel steers to the same direction of the front wheel (same-steering behaviour). The time constant τ determines the frequency at which the behaviour switches from one to the other type, whereas the coefficients kr and kidetermines the transfer function module respectively at low and high frequency. This control makes it possible to merge the advantages of both low-pass and high-pass configurations: the counter-steering behaviour may have potential good effects on vehicle handling capabilities, whereas the same-steering behaviour may be useful for stabilising purposes.
In this research we are going to explore the domain of the coefficients ki, kr, and τ, looking for the set that returns maximum performances.
5 Stability analysis
The easiest way to study the stability of a motorcycle is to perform the eigenvalue analysis starting from the linearised equations of motion (Fujioka and Matsui, 1993; Sharp, 1971; Cossalter et al., 2004). If the equations are not available, information about vehicle stability can be extracted by performing a perturbation analysis. The first step consists in exciting the multi-body motorcycle model which is in steady-state condition. A sudden braking input or a rider lateral motion are good perturbations for this kind of test. By post-processing the response of the system, frequencies and damping coefficients of the excited modes can be extracted (Hikichi and Tezuka, 1995).
In order to directly compare different configurations of the active and passive rear steering systems, we need to define an index that summarises the stability performances of the 2WS motorcycle. The knowledge of all mode properties would not be suitable to select the most stabilising device, especially if a trade-off relationship between different modes occur (Fujioka and Matsui, 1993). Moreover, the response data contains so many harmonics that using a time domain fitting to extract mode properties becomes impossible. After these remarks, we define as stability index the integral of the power spectrum of the roll rate:

338 F. Maggio and V. Cossalter
2 2
0 0
1 ( ) d ( ) d2
N ftE t t
ωϕ ω ω ϕ
π= = (5)
where ϕ is the Discrete Fourier Transform of the roll rate, ωN is the highest calculated pulsation, ϕ is the roll rate, and tf is the integration time. This quantity represents the energy of the roll rate signal, which is related to the kinetic energy of the system associated to the roll motion:
21 ( )2 XT I tϕ= (6)
where IX is the overall system roll inertia (motorcycle and rider), measured with respect to the centre of mass. If the system is stable, the amplitude of the oscillations decreases exponentially and the system energy E is finite. On the contrary, if the response is diverging, the energy becomes infinite. By using this property of the index E it is possible to reject the configurations of the rear steering system that make the motorcycle unstable. For stable configurations, we assume as more stable – and so better – those with minimum energy. Indeed, high stability does not allow persisting and evident oscillations. If the energy is calculated on the power spectrum, the proposed criteria could fail in presence of high-narrow peaks, which lead to low energy even if there is evident low stability. As consequence the criteria must be used carefully and always together with a qualitative spectrum analysis. The spectrum can also be used to identify the dominant mode in the response.
Three different perturbation analyses are performed in order to trace a complete scenario of the rear steering system stabilising capabilities: lateral rider displacement in straight running, lateral rider displacement in steady cornering, and braking from straight running. The first two tests are typically performed to investigate how the rear steering system damps the weave mode, whereas the latter is necessary to verify how the device interacts with the load transfer that normally reduces wobble stability (Bandinu, 2003).
5.1 Passive system
For the passive system, we will study the energy function E in the domain of preload MPS,stiffness KPS, and damping coefficient CPS. A Design of Experiment is carried out for each of the proposed manoeuvres, after preliminary simulations have shown which range to adopt for each parameter.
The results are represented using greyscale maps, where the lighter the grey, the lower the oscillation energy. Since the evaluation method returns the oscillation energy except for a constant of proportionality, numerical values are not significant and the scale is not included in Figure 8. Moreover, having calibrated the intensity of the applied perturbation on the specific running condition, results (maps) of different tests can not be compared.
The maps of Figure 8 are drawn in the KPS – CPS plane after having observed that the spring preload has the lowest influence on the oscillation energy.

How a rear steering system may improve motorcycle dynamics 339
Figure 8 Energy maps for the passive system with 8 Nm preload (dark grey = high energy)
In straight running the influence of the stiffness on the energy distribution is low and the stabilising capability of the passive system is mainly a function of the damping coefficient. On the contrary, the response to the cornering weave test equally depends on both parameters, probably because the spring is stressed by the steering torque due to the vertical load on the rear wheel. The braking test returns an energy map that is similar to the one we obtained for the weave test in straight running. This confirms that, without camber angle, the response of the 2WS motorcycle is mainly governed by the damping coefficient.
The dashed ellipses shows where the minimum energies are obtained, that is for which parameter sets the passive system assures better stability. Since these areas are not superimposable, it is not possible to select a single optimal configuration. As acceptable compromise we choose KPS = 1000 Nm/rad and CPS = 200 Nms/rad.
To test the effectiveness of the selected device, we compare the response of the 2WS motorcycle with the response of the conventional motorcycle in the same conditions (weave test in straight running). The rider’s head lateral acceleration is assumed as reference quantity, because it is somehow related to the rider’s feeling. Figure 9 shows that the 2WS motorcycle equipped with the passive system does not start weaving after the impulse and the acceleration peak is strongly reduced.

340 F. Maggio and V. Cossalter
Figure 9 Comparison between the conventional motorcycle and the 2WS motorcycle equipped with the selected passive system: response to weave test in straight running
The selected passive system also improves stability when the braking manoeuvre is performed, but the benefits are in this case limited.
5.2 Active system
To identify the optimal control gains for the active system we search the minimum of the system energy E in the domain of the coefficients ki, kr, and τ. First, several preliminary simulations are used to find the right range for each control parameter, and then a full factorial DOE is performed for three different running conditions: weave test in straight running, weave test when cornering, braking from straight running.
Let us consider all of the results of the weave test both in straight running and cornering. The response mainly depends on the ki coefficient, that governs the rear steering angle in dynamical conditions. As general result, the vehicle becomes unstable with ki < 0, independently from the values of the other coefficients. This can be explained by observing that a negative value of the ratio ki determine a counter-steering behaviour of the rear wheel for relatively high frequency inputs. We know from the passive system analysis and also from automotive applications that the weave (or yaw) stability can be improved if the rear wheel steers to the same direction of the front one.
The influence of the ratio kr is generally negligible, except for small values of the time constant τ; the combination of τ < 0.2s and kr < 0 makes the 2WS motorcycle unstable.
The effect of the time constant τ on the system energy is visible only if kr < 0, whereas it is negligible with kr ≥ 0. This can be explained by observing that having kr < 0 and ki > 0 the time constant τ defines the frequency at which the rear steering system switches from counter-steering behaviour to same-steering behaviour. If kr ≥ 0 and ki > 0 we have anyway the rear wheel steering to the same direction of the front one, and the time constant has much less importance.
Let us consider now the braking tests. If a positive ki improves the stability of the response for weave tests, it has been found that ki has to be slightly negative to improve the response when braking. Regarding the other coefficients, neither the time constant τ nor the ratio kr affect significantly braking stability.
Figure 10 shows the system energy maps calculated by varying ki and kr with the time constant fixed τ = 0.2 s. The oblique dashed line connects the configurations with ki = kr.These particular coefficient sets transform the differential equation of the control system in a pure algebraic equation to which correspond a direct connection between front and

How a rear steering system may improve motorcycle dynamics 341
rear steer angle with ratio ki = kr. The small white circle within each map shows the configuration ki = kr = 0, which corresponds to the conventional motorcycle. This makes any comparison straightforward.
Figure 10 Energy maps for the passive system with 0.2 s time constant (dark grey = high energy)
The first two maps of Figure 10 show that the weave stability can be strongly improved using the active rear steering system. Indeed, the conventional motorcycle always returns a higher energy than the configurations located within the dashed ellipses. The two ellipses can not be superimposed, but assuming ki = kr = 0.10 (coefficient set represented with a star) the 2WS motorcycle shows a very improved behaviour, both in straight running and cornering.
Going on the braking results, it is easy to see that the selected system must be avoided, because it would make the motorcycle really unstable. To improve the braking stability it is necessary to adopt a negative value of ki, which is detrimental in normal running. This trade-off relationship, force to design a control with the capability of changing the rear steering behaviour as the brake is activated. A good solution could be to switch the control coefficient from ki = 0.10; kr = 0.10 to ki = –0.05; kr = 0.00. Alternatively, it is possible to restore the original braking dynamics by inhibiting the rear steering system. Without any adjustment, the reduction of stability showed by the rear steering device in braking condition is dangerous.

342 F. Maggio and V. Cossalter
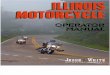
In order to understand how the rear steering system changes the modal properties of the vehicle, it is necessary to study how the power spectrum of the response changes as the control coefficients change. This is done in Figure 11 where the weave test spectrums obtained for several configurations with ki = kr (dashed line in the first map of Figure 10) are compared.
Figure 11 Power spectrum of the response to the weave test in straight running for several configurations
The response of the motorcycle without rear steering system has a high peak around 3.5 Hz, which clearly proves that the weave mode is dominant. As the steering ratio increases, the weave peak lowers and the wobble component (peak around 5.8 Hz) starts growing. This transformation of the spectrum is accompanied by a reduction of the integral area, which is the system energy: the minimum is reached for ki = kr = 0.15.By further increasing the steering ratio, the energy starts increasing again because the wobble peak becomes very high.
The results obtained by analysing the configurations with ki = kr are general. The active rear steering system improves the weave stability by transferring energy to the wobble mode. The steering ratio defines the amount of energy that is transferred, making it possible to calibrate the control on the vehicle characteristics. The energy transfer also explains why, in braking conditions, a positive ratio has negative effects: it transfer energy to the wobble that is already low stable. The maximum stability is reached when the oscillation energy is equally distributed between weave and wobble modes, that is when the power spectrum is smooth and balanced. Another effect of the active system is the slight reduction of the weave frequency as the rear steering ratio increases: this may help the rider in controlling the vehicle when it starts weaving.
6 Handling analysis
The handling analysis included in this paper is not conceived to investigate if the rear steering system improves the vehicle performances, but is designed to verify that it does not alter the normal riding. Indeed, we expect that an average rider could not react correctly if an usual vehicle behaviour (caused by the rear steering device) occurs.
An exhaustive analysis of the handling properties of the modified motorcycle would require a lot of simulations, each for any possible running condition. For time reasons we have carried out a limited number of tests, focusing the attention on specific situations where the rear steering system is highly stressed. Two different manoeuvres such as

How a rear steering system may improve motorcycle dynamics 343
accelerating and braking from steady cornering conditions are suitable for our purposes. The braking torque has been distributed between front and rear brakes accordingly to the ratio 30/70. Despite it is quite unusual to use the rear brake so strongly, we do this to subject the rear steering system to critical conditions.
Figure 12 contains the comparison between the conventional motorcycle behaviour and the 2WS (passive) motorcycle behaviour; the lateral acceleration of the rider’s head is used as reference quantity. Let us consider first the accelerating case (left plots). The conventional motorcycle performs the manoeuvre in a smooth way, and minimum lateral displacements are perceived by the rider. On the contrary, two discontinuities in the speed of the 2WS motorcycle occur and high peaks in the lateral acceleration are simultaneously obtained. These unexpected reactions are due to the external torque generated by the longitudinal thrust force: the higher is the camber angle, the stronger will be the arm of the force. Therefore, the 2WS passive motorcycle does not behave as the conventional vehicle, and the rider may be experiencing a bad feeling.
Figure 12 Comparison between original motorcycle and 2WS motorcycle (passive system with damping coefficient 200 Nms/rad, spring stiffness 1000 Nm/rad, and preload 8 Nm)
In braking condition (right plots) the passive system is even more detrimental. Indeed, as the rear brake is activated, the 2WS motorcycle starts oscillating at wobble frequency. The same happens for the original motorcycle, but stability is higher and oscillations reduce their amplitude as the brake is released.
Figure 13 contains the comparison between the 2WS motorcycle featuring the active device and the conventional motorcycle. In acceleration phase (left plot) the two vehicles behave in the same manner: no evident peaks occur in the lateral acceleration. This means that the active solution does not alter negatively the rider feeling when opening the throttle. As expected, the 2WS motorcycle becomes unstable when the brake is activated (right plot).

344 F. Maggio and V. Cossalter
Figure 13 Comparison between original motorcycle and 2WS motorcycle (active system with ki = kr = 0.15)
7 Conclusion
In this research the effects of a rear steering system for motorcycles have been investigated. Both a passive and an active system have been tested to determine which configuration assures the best stability without compromising the rider’s feeling. In order to rank each solution, a method based on the oscillation (kinetic) energy has been proposed and validated. The research has been carried out using a multi-body model of the motorcycle, featuring an advanced motorcycle tyre model and specific control routines.
It has been found that the passive system has good effects on the stability, causing a strong reduction in the weave oscillations that occur after the motorcycle is excited with a lateral impulse. On the contrary, there are not stabilising effects on the wobble mode, that becomes unstable in braking conditions. A configuration with preload MPS = 8 Nm, damping coefficient CPS = 200 Nms/rad, and stiffness KPS = 1000 Nm/rad has been selected as best compromise, but the steering system should be anyway inhibited when the brake is activated. Handling simulations have demonstrated that the 2WS motorcycle with the passive system returns unexpected oscillations when the throttle is opened, altering in negative way the rider’s feeling.
An original active control for the rear steering system has been proposed. It is based on a 1st order relationship between front and rear steering angles. It has been found that this system may have stabilising effects on both the weave and the wobble modes, but different coefficient sets are required for the two purposes. Assuming as most important target the weave stability, the configuration having ki = kr = 0.15 has been selected. It is worth to remark that also the active system makes the vehicle dangerously unstable in braking conditions and opportune actions (such as inhibiting the rear steering or switching to a different coefficient set) are needed when the brake lever is activated. The handling tests have shown that the active system makes the motorcycle neutral when the throttle is opened, so that the rider feels as it would be riding the conventional motorcycle.
By analysing the power spectrum of the weave test response, we found that the stabilising action of the active system is in general due to an energy transfer from weave mode to wobble mode.

How a rear steering system may improve motorcycle dynamics 345
Acknowledgements
The authors wish to thank LMS for having provided the software DADS. They also thank professor R. Lot for his suggestions in building the multi-body model.
ReferencesBandinu, E. (2003) Motorcycle Stability in Straight Running and Curves Under Braking and
Accelerating Conditions, Degree Thesis, Library of the Mechanical Engineering Dept., Dissertation Service, University of Padova (in Italian).
Berritta, R., Cossalter, V., Doria, A. and Ruffo, N. (2002) ‘Identification of motorcycle tire properties by means of a testing machine’, Proc. 2002 SEM Annual Conference and Exposition on Experimental and Applied Mechanics, Milwaukee, USA, pp.116–119.
Bortoluzzi, D., Doria, A., Lot, R. and Fabbri, L. (2000) ‘Experimental investigation and simulation of motorcycle turning performance’, 3rd International Motorcycle Conference, Munich, Germany, pp.175–191.
Bortoluzzi, D., Lot, R. and Ruffo, N. (2001) ‘Motorcycle steady turning: the significance of geometry and Inertia’, Proc. FISITA 7th International Conference, May 2001, Florence, Italy.
Cesari, C. (2000) Analysis of the Dynamic Behavior of A Motorcycle Equipped with Interlinked Front and Rear Steering Systems, Degree Thesis, Library of the Mechanical Engineering Dept., Dissertation Service, University of Padova (in Italian).
Cossalter, V. (2002) Motorcycle Dynamics, Race Dynamics Publisher, Milwaukee. Cossalter, V. and Lot, R. (2002) ‘A motorcycle multi-body model for real time simulations based
on the natural coordinates approach’, Vehicle System Dynamics, Vol. 37, pp.423–447.Cossalter, V., da Lio, M., Biral, F. and Fabbri, L. (1998) ‘Evaluation of motorcycle
maneuverability with the optimal maneuver method’, SAE Transactions, SAE Paper No. 983022, Vol. 107, No. 6, pp.2512–2518.
Cossalter, V., da Lio, M., Lot, R. and Fabbri, L. (1999a) ‘A general method for the evaluation of vehicle maneuverability with special emphasis on motorcycles’, Vehicle System Dynamics,Vol. 31, pp.113–135.
Cossalter, V., Doria, A. and Lot, R. (1999b) ‘Steady turning of two-wheeled vehicles’, VehicleSystem Dynamics, Vol. 31, pp.157–181.
Cossalter, V., Doria, A. and Mitolo, L. (2002a) ‘Inertial and modal properties of racing motorcycles’, Proc. 2002 SAE Motorsports Engineering Conference and Exhibition,SAE Paper 2002-01-3347, pp.605–611.
Cossalter, V., Lot, R. and Maggio, F. (2002b) ‘The influence of tire properties on the stability of a motorcycle in straight running and curves’, Proc. 2002 SAE Automotive Dynamics and Stability Conference, SAE Paper 2002-01-1572, pp.87–94.
Cossalter, V., Doria, A., Lot, R., Ruffo, N. and Salvador, M. (2003a) ‘Dynamic properties of motorcycle and scooter tires: measurement and comparison’, Vehicle System Dynamics,Vol. 39, pp.329–352.
Cossalter, V., Lot, R. and Maggio, F. (2003b) ‘A multibody code for motorcycle handling and stability analysis with validation and examples of application’, Proc. 2003 SAE Small Engine Technology Conference and Exhibition, SAE Paper 2003-32-0035, pp.1–6.
Cossalter, V., Lot, R., and Maggio, F. (Eds.) (2004) ‘The modal analysis of a motorcycle in straight running and on a curve’, Meccanica, Vol. 39, Kluwer Academic Publishers, pp.1–16.
da Lio, M. (1997) ‘Analisi della manovrabilità dei veicoli. Un approccio basato sul controllo ottimo’, Journal of ATA (FISITA), Vol. 50, pp.1, 2 (in Italian).
de Vries, E.J.H. and Pacejka, H.B. (1997) ‘Motorcycle tire measurements and models’, Proc. 15th IAVSD Symposium, Zwets & Zeitlinger, Budapest, Hungary, pp.280–298.

346 F. Maggio and V. Cossalter
de Vries, E.J.H. and Pacejka, H.B. (1998) ‘The effect of tire modeling on the stability analysis of a motorcycle’, Proc. 4th International Symposium on Advanced Vehicle Control, Nagoya, Japan, pp.1–6.
Fujioka, T. and Matsui, A. (1993) ‘Improving the straight running stability of motorcycles using a two-wheel steering system’, Proc. 1993 SAE Small Engine Technology Conference,SAE Paper No. 931552, pp.661–668.
Hikichi, T. and Tezuka, Y. (1995) ‘Study on improving the motorcycle high speed stability using a rear wheel self-steering system’, Proc. 1995 SAE International Congress and Exposition, SAE Paper No. 950198, pp.1–11.
Kane, T.R. (1978) ‘The effect of frame flexibility on high speed weave of motorcycles’, SAE Transactions, SAE Paper 780306, Vol. 87, Sec. 2, pp.1389–1396.
Lot, R. (Ed.) (2004) ‘A motorcycle tire model for dynamic simulations: theoretical and experimental aspects’, Meccanica, Kluwer Academic Publishers, Vol. 39, pp.207–220.
Maggio, F. (2001) Vibrational Modes of Motorcycle: Coupling between In-plane and Out-of-plane Modes, Degree Thesis, Library of the Mechanical Engineering Dept., Dissertation Service, University of Padova (in Italian).
Maggio, F. (2004) Touring Motorcycle with Two Steering Wheels, PhD Dissertation, Library of the Mechanical Engineering Dept., Dissertation Service, University of Padova.
NASA (1978) Anthropometric Source Book: Anthropometry for Designers, NASA Scientific and Technical Office, NASA Reference Publication 1024, Vol. I.
Pacejka, H.B. and Bakker, E. (1991) ‘The magic formula tire model’, Vehicle System Dynamics,Vol. 21, Suppl. No. 21, pp.1–18.
Sharp, R.S., Evangelou, S. and Limebeer, D.J.N. (2003) ‘Improved modeling of motorcycle dynamics’, Multibody Dynamics IDMEC/IST, Lisbon, Portugal.
Sharp, R.S. (1971) ‘The stability and control of motorcycles’, Journal of Mechanical Engineering Science, Vol. 13, pp.316–329.
Sharp, R.S. (1974) ‘The influence of frame flexibility on the lateral stability of motorcycles’, Journal of Mechanical Engineering Science, Vol. 16, pp.117–120.
Sharp, R.S. and Alstead, C.J. (1980) ‘The influence of structural flexibilities on the straight running stability of motorcycles’, Vehicle System Dynamics, Vol. 9, pp.327–357.
Sharp, R.S. and Limebeer, D.J.N. (2001) ‘A motorcycle model for stability and control analysis’, Multibody System Dynamics, Vol. 6, pp.123–142.
Silva, M.P.T., Ambrósio, J.A.C. and Pereira, M.S. (1997) ‘Biomechanical model with joint resistance for impact simulation’, Multibody System Dynamics, Vol. 1, pp.65–84.
Spierings, P.T.J. (1981) ‘The effect of lateral front fork flexibility on the vibrational modes of straight-running single-track vehicles, Vehicle System Dynamics, Vol. 10, pp.21–35.
Takahashi, T., Yamada, T. and Nakamura, T. (1984) ‘Experimental and theoretical study of the influence of tires properties on straight-running weave response’, Proc. 1984 SAE International Congress and Exposition, SAE Paper 840248, pp.1–10.
Verma, M.K., Scott, R.A. and Segel, L. (1980) ‘Effect of frame compliance on the lateral dynamics of motorcycles’, Vehicle System Dynamics, Vol. 9, pp.181–206.