Embed Size (px)
Citation preview

Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.1
1 INTRODUCTION
Course Contents
1.1 Introduction
1.2 Fluid power and its scope
1.3 Classification of fluid power systems
1.4 Hydrostatic and hydrodynamic
systems
1.5 Advantages of a fluid power system
1.6 General layout of hydraulic system
1.7 Advantages of a hydraulic system
1.8 Disadvantages of a hydraulic system
1.9 Applications of hydraulic systems
1.10 Principles of hydraulic fluid power
1.11 Basic electrical devices

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.2
1.1 INTRODUCTION
In the industry we use three methods for transmitting power from one point to another.
Mechanical transmission is through shafts, gears, chains, belts, etc. Electrical transmission is
through wires, transformers, etc. Fluid power is through liquids or gas in a confined space. In
this chapter, we shall discuss a structure of hydraulic systems and pneumatic systems. We
will also discuss the advantages and disadvantages and compare hydraulic, pneumatic,
electrical and mechanical systems.
1.2 FLUID POWER AND ITS SCOPE
− Fluid power is the technology that deals with the generation, control and transmission of
forces and movement of mechanical element or system with the use of pressurized fluids in
a confined system. Both liquids and gases are considered fluids. Fluid power system
includes a hydraulic system (hydra meaning water in Greek) and a pneumatic system
(pneuma meaning air in Greek). Oil hydraulic employs pressurized liquid petroleum oils
and synthetic oils, and pneumatic employs compressed air that is released to the atmosphere
after performing the work.
− Perhaps it would be in order that we clarify our thinking on one point. By the term “fluid”
we refer to air or oil, for it has been shown that water has certain drawbacks in the
transmission of hydraulic power in machine operation and control. Commercially, pure
water contains various chemicals (some deliberately included) and also foreign matter, and
unless special precautions are taken when it is used, it is nearly impossible to maintain
valves and working surfaces in satisfactory condition. In the cases where the hydraulic
system is closed (i.e., the one with a self-contained unit that serves one machine or one
small group of machines), oil is commonly used, thus providing, in addition to power
transmission, benefits of lubrication not afforded by water as well as increased life and
efficiency of packings and valves. It should be mentioned that in some special cases, soluble
oil diluted with water is used for safety reasons. The application of fluid power is limited
only by the ingenuity of the designer, production engineer or plant engineer. If the
application pertains to lifting, pushing, pulling, clamping, tilting, forcing, pressing or any
other straight line (and many rotary) motions, it is possible that fluid power will meet the
requirement.
− Fluid power applications can be classified into two major segments:
Stationary hydraulics: Stationary hydraulic systems remain firmly fixed in one position.
The characteristic feature of stationary hydraulics is that valves are mainly solenoid operated.
The applications of stationary hydraulics are as follows:
Production and assembly of vehicles of all types.
Machine tools and transfer lines.
Lifting and conveying devices.
Metal-forming presses.
Plastic machinery such as injection-molding machines.
Rolling machines.
Lifts.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.3
Food processing machinery.
Automatic handling equipment and robots.
Mobile hydraulics: Mobile hydraulic systems move on wheels or tracks such as a tower
crane or excavator truck to operate in many different locations or while moving. A
characteristic feature of mobile hydraulics is that the valves are frequently manually operated.
The applications of mobile hydraulics are as follows:
Automobiles, tractors, aeroplanes, missile, boats, etc.
Construction machinery.
Tippers, excavators and elevating platforms.
Lifting and conveying devices.
Agricultural machinery.
− Hydraulics and pneumatics have almost unlimited application in the production of goods
and services in nearly all sectors of the country. Several industries are dependent on the
capabilities that fluid power affords. Table 1.1 summarizes few applications of fluid power.
Table 1.1 - More applications of fluid power
Agriculture Tractors; farm equipment such as
mowers, ploughs,
chemical and water sprayers, fertilizer
spreaders, harvesters
Automation Automated transfer lines, robotics
Automobiles Power steering, power brakes,
suspension systems,
hydrostatic transmission
Aviation Fluid power equipment such as
landing wheels in aircraft.
Helicopters, aircraft trolleys, aircraft
test beds, luggage loading and
unloading systems, ailerons, aircraft
servicing, flight simulators
Construction
industry/equipment
For metering and mixing of concrete
rudders, excavators,
lifts, bucket loaders, crawlers, post-
hole diggers, road graders, road
cleaners, road maintenance vehicles,
tippers
Defense Missile-launching systems, navigation
controls
Entertainment Amusement park entertainment rides
such as roller coasters
Fabrication industry Hand tools such as pneumatic drills,
grinders, borers,
riveting machines, nut runners
Food and beverage All types of food processing
equipment, wrapping, bottling,
Foundry Full and semi-automatic molding
machines, tilting of furnaces, die-

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.4
casting machines
Glass industry Vacuum suction cups for handling
Instrumentation Used to create/operate complex
instruments in space
rockets, gas turbines, nuclear power
plants, industrial labs
Jigs and fixtures Work holding devices, clamps,
stoppers, indexers
Machine tools Automated machine tools,
numerically controlled(NC)
machine tools
Materials handling Jacks, hoists, cranes, forklifts,
conveyor systems
Medical Medical equipment such as breathing
assistors, heart assist
devices, cardiac compression
machines, dental drives and human
patient simulator
Movies Special-effect equipment use fluid
power; movies such as
Jurassic park, Jaws, Anaconda,
Titanic
Mining Rock drills, excavating equipment,
ore conveyors, loaders
Newspapers and periodicals Edge trimming, stapling, pressing,
bundle wrapping
Oil industry Off-shore oil rigs
Paper and packaging Process control systems, special-
purpose machines for
rolling and packing
Pharmaceuticals Process control systems such as bottle
filling, tablet placement, packaging
Plastic industry Automatic injection molding
machines, raw material
feeding, jaw closing, movement of
slides of blow molder
Press tools Heavy duty presses for bulk metal
formation such as sheet
metal, forging, bending, punching,
etc.
Printing industry For paper feeding, packaging
Robots Fluid power operated robots,
pneumatic systems
Ships Stabilizing systems, unloading and
loading unit, gyroscopic
instruments, movement of flat forms,
lifters, subsea inspection equipment
Textiles Web tensioning devices, trolleys,
process controllers

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.5
Transportation Hydraulic elevators, winches,
overhead trams
Under sea Submarines, under sea research
vehicles, marine drives and control of
ships
Wood working Tree shearers, handling huge logs,
feeding clamping and
saw operations
− The following are the two types of hydraulic systems:
1. Fluid transport systems: Their sole objective is the delivery of a fluid from one location
to another to accomplish some useful purpose. Examples include pumping stations for
pumping water to homes, cross-country gas lines, etc.
2. Fluid power systems: These are designed to perform work. In fluid power systems, work
is obtained by pressurized fluid acting directly on a fluid cylinder or a fluid motor. A cylinder
produces a force resulting in linear motion, whereas a fluid motor produces a torque resulting
in rotary motion.
1.3 CLASSIFICATION OF FLUID POWER SYSTEMS
The fluid power system can be categorized as follows:
1. Based on the control system
Open-loop system: There is no feedback in the open system and performance is
based on the characteristics of the individual components of the system. The open-
loop system is not accurate and error can be reduced by proper calibration and
control.
Closed-loop system: This system uses feedback. The output of the system is fed back
to a comparator by a measuring element. The comparator compares the actual output
to the desired output and gives an error signal to the control element. The error is used
to change the actual output and bring it closer to the desired value. A simple closed-
loop system uses servo valves and an advanced system uses digital electronics.
2. Based on the type of control
Fluid logic control: This type of system is controlled by hydraulic oil or air. The system
employs fluid logic devices such as AND, NAND, OR, NOR, etc. Two types of fluid logic
systems are available:
(a) Moving part logic (MPL): These devices are miniature fluid elements using
moving parts such as diaphragms, disks and poppets to implement various logic gates.
(b) Fluidics: Fluid devices contain no moving parts and depend solely on interacting
fluid jets to implement various logic gates.
Electrical control: This type of system is controlled by electrical devices. Four basic
electrical devices are used for controlling the fluid power systems: switches, relays,

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.6
timers and solenoids. These devices help to control the starting, stopping, sequencing,
speed, positioning, timing and reversing of actuating cylinders and fluid motors.
Electrical control and fluid power work well together where remote control is
essential.
Electronic control: This type of system is controlled by microelectronic devices. The
electronic brain is used to control the fluid power muscles for doing work. This
system uses the most advanced type of electronic hardware including programmable
logic control (PLC) or microprocessor (P). In the electrical control, a change in
system operation results in a cumbersome process of redoing hardware connections.
The difficulty is overcome by programmable electronic control. The program can be
modified or a new program can be fed to meet the change of operations. A number of
such programs can be stored in these devices, which makes the systems more flexible.
1.4 HYDROSTATIC AND HYDRODYNAMIC SYSTEMS
− A hydrostatic system uses fluid pressure to transmit power. Hydrostatics deals with the
mechanics of still fluids and uses the theory of equilibrium conditions in fluid. The system
creates high pressure, and through a transmission line and a control element, this pressure
drives an actuator (linear or rotational).
− The pump used in hydrostatic systems is a positive displacement pump. The relative spatial
position of this pump is arbitrary but should not be very large due to losses (must be less
than 50 m). An example of pure hydrostatics is the transfer of force in hydraulics.
− Hydrodynamic systems use fluid motion to transmit power. Power is transmitted by the
kinetic energy of the fluid. Hydrodynamics deals with the mechanics of moving fluid and
uses flow theory. The pump used in hydrodynamic systems is a non-positive displacement
pump.
− The relative spatial position of the prime mover (e.g., turbine) is fixed. An example of pure
hydrodynamics is the conversion of flow energy in turbines in hydroelectric power plants.
− In oil hydraulics, we deal mostly with the fluid working in a confined system, that is, a
hydrostatic system.
1.5 ADVANTAGES OF A FLUID POWER SYSTEM
Oil hydraulics stands out as the prime moving force in machinery and equipment designed to
handle medium to heavy loads. In the early stages of industrial development, mechanical
linkages were used along with prime movers such as electrical motors and engines for
handling loads. But the mechanical efficiency of linkages was very low and the linkages
often failed under critical loading conditions. With the advent of fluid power technology and
associated electronics and control, it is used in every industry now.
− The advantages of a fluid power system are as follows:
1. Fluid power systems are simple, easy to operate and can be controlled accurately:
Fluid power gives flexibility to equipment without requiring a complex mechanism. Using
fluid power, we can start, stop, accelerate, decelerate, reverse or position large

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.7
forces/components with great accuracy using simple levers and push buttons. For example, in
earth-moving equipment, bucket carrying load can be raised or lowered by an operator using
a lever. The landing gear of an aircraft can be retrieved to home position by the push button.
2. Multiplication and variation of forces: Linear or rotary force can be multiplied by a
fraction of a kilogram to several hundreds of tons.
3. Multifunction control: A single hydraulic pump or air compressor can provide power and
control for numerous machines using valve manifolds and distribution systems. The fluid
power controls can be placed at a central station so that the operator has, at all times, a
complete control of the entire production line, whether it be a multiple operation machine or a
group of machines. Such a setup is more or less standard in the steel mill industry.
4. Low-speed torque: Unlike electric motors, air or hydraulic motors can produce a large
amount of torque while operating at low speeds. Some hydraulic and pneumatic motors can
even maintain torque at a very slow speed without overheating.
5. Constant force or torque: Fluid power systems can deliver constant torque or force
regardless of speed changes.
6. Economical: Not only reduction in required manpower but also the production or
elimination of operator fatigue, as a production factor, is an important element in the use of
fluid power.
7. Low weight to power ratio: The hydraulic system has a low weight to power ratio
compared to electromechanical systems. Fluid power systems are compact.
8. Fluid power systems can be used where safety is of vital importance: Safety is of vital
importance in air and space travel, in the production and operation of motor vehicles, in
mining and manufacture of delicate products. For example, hydraulic systems are responsible
for the safety of take-off, landing and flight of aeroplanes and space craft. Rapid advances in
mining and tunnelling are the results of the application of modern hydraulic and pneumatic
systems.
1.6 GENERAL LAYOUT OF HYDRAULIC SYSTEM
1.6.1 Components of Hydraulic System
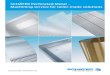
− Basic hydraulic system has the following components:
1) Oil reservoir 2) Rotary pump
3) Pressure relief valve 4) Direction control valve
5) Flow control valve 6) Double acting cylinder
7) Pressure gauge 8) Filter
1) Oil Reservoir
− Main function of "oil reservoir" is to store sufficient amount of hydraulic oil in the system.
− Apart from this, it has other important functions such as:
(a) To cool the hot return oil.
(b) To settle down the contaminants.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.8
Figure 1.1 - Layout of general hydraulic system
(c) To remove air bubbles.
(d) To separate water from the oil etc.
2) Rotary pump
− The function of rotary pump is to pump hydraulic oil to the hydraulic circuit'
− It converts the mechanical energy (rotation of shaft) into hydraulic energy
− Rotary pump is a positive displacement pump. It can deliver constant flow even at high
pressure
3) Pressure relief valve
− It is an important component which is required for every positive displacement pump
− This valve is connected at the outlet of pump. Its main function is to release the oil back
tank when the pressure increases beyond pre-set value.
4) Direction control valve
− It controls the direction of flow of oil, by which it performs extension and retraction of
actuator
5) Flow control valve
− It Controls the rate of flow of oil by which speed of extension or retraction of actuator is
controlled.
6) Actuator
− Actuator produces work. There are two types, linear actuator and rotary actuator
− Linear actuator is called cylinder, rotary actuator is called motor.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.9
− Double acting cylinder develops force and motion. It converts hydraulic energy in to
mechanical energy
Force developed = Pressure of oil x Area of piston
7) Pressure gauge
− It is an important component of hydraulic system.
− It shows the pressure reading.
− Pressure settings are made by looking to the pressure gauge.
− Without pressure gauge, it is not possible to make the pressure relief valve setting,
unloading valve settings etc.
8) Filter
− Its main function is to remove suspended solid contaminates from the oil and to provide
clean hydraulic oil to the system.
1.7 ADVANTAGES OF A HYDRAULIC SYSTEM
The basic advantages offered by a hydraulic system are as follows:
l. Hydraulic power is easy to produce, transmit, store, regulate and control, maintain and
transform
2. Weight to power ratio of a hydraulic system is comparatively less than that for an electro-
mechanical system. (About 8.5 kg/kw for electrical motors and 0.g5 kg/kw for a hydro
system).
3. It is possible to generate high gain in force and power amplification.
4. Hydraulic systems are uniform and smooth, generate step less motion and variable speed
and force to a greater accuracy.
5. Division and distribution of hydraulic power is simpler and easier than other forms of
energy.
6. Limiting and balancing of hydraulic forces are easily performed.
7. Frictional resistance is much less in a hydraulic system as compared to a mechanical
movement.
8. Hydraulic elements can be located at any place and controlled reversely.
9. The noise and vibration produced by hydraulic pumps is minimal.
10. Hydraulic systems are cheaper if one considers the high efficiency -of power
transmission.
I l. Easy maintenance of hydraulic system is another advantage.
12. Hydraulics is mechanically safe, compact and is adaptable-to other forms of power and
can be easily controlled.
13. Hydraulic output can be both linear, rotational and angular. Use of flexible connection in
hydraulic system permits generation of compound motion without gears etc.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.10
14. Hydraulics is a better over-load safe power system. This can be easily achieved by using a
pressure relief valve.
15. Absolutely accurate feedback of load, position, etc. can be achieved in a hydraulic system
as in electro hydraulic and digital electronic servo system. Because of high power and
accurate control possibility, in modem engineering language hydraulics is termed as the
muscle of the system and electronics its nerves.
1.8 DISADVANTAGES OF A HYDRAULIC SYSTEM
In spite of all the above advantages, hydraulic systems have some drawbacks which are
mentioned below.
The disadvantages are:
1. Hydraulic elements have to be machined to a high degree of precision which increases the
manufacturing cost of the system.
2. Certain hydraulic systems are exposed to unfriendly climate and dirty atmosphere as the in
case of mobile hydraulics like dumpers, loaders, etc.
3. Leakage of hydraulic oil poses a problems to hydraulic users.
4. Hydraulic elements have to be specially treated to protect them against rust, corrosion, dirt,
etc.
5. Hydraulic oil may pose problems if it disintegrates due to aging and chemical
deterioration.
6. Petroleum based hydraulic oil may pose fire hazards thus limiting the upper level of
working temperature. However, due to availability of synthetic fire resistant oils this problem
is of academic interest now-a-days. To combat environmental effects of petroleum and
chemical based oils, efforts are on to use bio degradable oils now.
1.9 APPLICATIONS OF HYDRAULIC SYSTEMS
1. Machine tools: CNC (computerized Numerical control) machines, hydraulic presses,
hydraulic shaper, etc.
2. Material handling equipment: Elevators, forklifts, cranes, lifts and hoists erc.
3. Construction field: Earth moving machines such as excavators, cranes, dozers, loaders,
dumpers, tippers, trucks, tractors etc.
4. Automobiles: Hydraulic brakes, hydraulic steering, hydraulic suspension, hydraulic
clutch, hydraulic power transmission, hydraulic coupling,
5. Material testing laboratory: UTM (universal testing machine) and other destructive testing
Machines, BP (burst pressure) testing machine etc.
6. Aerospace: Landing gear, brakes, flight controls (such as), cargo loading door, rudder,
elevator, flap, aileron, etc.
7. Railways: Hydraulic brakes, hydraulic steering, hydraulic suspension, hydraulic clutch,
hydraulic power transmission, hydraulic coupling hydraulic torque converter, etc.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.11
8. Marine field: Ship steering system, ship yards, ship building.
9. Medical equipment: Medical chairs and operating tables.
10. Agricultural equipment: Harvesters, tractors, field sprayers, seeding machine, fertilizer
Machine etc.
Table 1.2 - Difference between Hydraulic System and pneumatic System
No. Hydraulic system Pneumatic system
1 Working fluid is hydraulic oil. Working fluid is compressed air
2
As oil is incompressible, oil can be
pressurized to very high pressure. (500 bar
or even more)
Air is compressible; hence air can be
pressurized to lesser pressure. (Only up
to l0 bar approx.)
3 Since pressure is high, force developed is
also very high (thousands of tone).
Since pressure is very less, force
developed is very less (up to I ton)
4 Since pressure is high, components are
very strong, made of steel and are heavy.
Components of pneumatic system are
lighter in weight, are made of
aluminium.
5
As oil has more viscosity, it cannot flow
fast. Hence hydraulic systems are slower in
operation.
Air has very less viscosity, it can flow
fast. Hence pneumatic systems are
quicker in operation.
6 Due to continuous recirculation,
temperature of oil increases.
Harder it runs, cooler it works. Free
expansion of air in cylinders and
motors causes chilling effect.
7
Hydraulic oils are petroleum based oils;
they are inflammable and there is every
chance of fire hazard, if neglected.
No chance of fire hazard. Hence
pneumatic tools are preferably used
inside mines, where flammable gasses
may present.
8 leakage of oil results in dirty and slippery
Surroundings, may lead to accidents.
Very clean and dry surrounding is
maintained.
9 Pump used is positive displacement pump.
So, pressure relief valve is necessary. No need of pressure relief valve.
10
There is no need of separable lubrication
System, because, hydraulic oil itself is a
lubricant.
Lubricator is necessary. Oil is mixed
with the compressed air in lubricator
and then supplied to the system.
11 Applications: CNC. Machine tools, earth
moving machines, automobiles. aviation
etc.
Applications : Material handling
systems,
hand tools mining works, automation,
automobiles etc.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.12
1.10 PRINCIPLES OF HYDRAULIC FLUID POWER
− In the language of physical science anything that can flow is a fluid. As Per the definition of
fluid, air, oil and water are nothing but fluids since all of them can flow. In our discussion
here, we will concentrate only on oil as the present day hydraulic system uses oil. The
operation of a fluid power system, i.e. a hydraulic system using oil is governed by the basic
physical laws of fluid flow as developed by a great-scientist Blaise Pascal (1648). This law
is known as "Pascal's law".
Potential Head
Figure 1.2 (a) - Potential head is independent of shape and size
Figure 1.2 (b) - Potential head is independent of container shape
1.10.1 Law of Hydrostatics
− The law of hydrostatics states that the pressure p of a fluid at rest increases on increasing
the depth. This means that,
p = Pressure = w h where,
w = specific weight of the liquid

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.13
h = depth or 'head' of the fluid
− It refers to a specific datum, the head defined by position L is called the potential head, h
and the total head represented by (h + z) is the piezometric head.
− From the above we understand that every liquid exerts a pressure on its base area by its own
weight. The pressure is dependent on the height of the liquid column and its density
irrespective of the shape or geometry of the container.
− Mathematically Hydrostatic Pressure is equal to
P = h x ρ x g
h = height of fluid column
ρ = density of liquid
g = acceleration of free fall.
1.11 BASIC ELECTRICAL DEVICES
− Seven basic electrical devices commonly used in the control of fluid power systems are:
1. Manually actuated push button switches
2. Limit switches
3. Pressure switches
4. Solenoids
5. Relays
6. Timers
7. Temperature switches
− Other devices used in electro pneumatics are
1. Proximity sensors
2. Electric counters
1.11.1 Push button switches
− A push button is a switch used to close or open an electric control circuit. They are
primarily used for starting and stopping of operation of machinery.
− They also provide manual override when the emergency arises. Push button switches are
actuated by pushing the actuator into the housing. This causes set of contacts to open or close.
− Push buttons are of two types
i) Momentary push button
ii) Maintained contact or detent push button

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.14
− Momentary push buttons return to their unactuated position when they are released.
Maintained (or mechanically latched) push buttons has a latching mechanism to hold it in
the selected position.
− The contact of the push buttons, distinguished according to their functions,
i) Normally open (NO) type
ii) Normally closed (NC) type
iii) Change over (CO) type.
1.11.2 Limit switches
− Any switch that is actuated due to the position of a fluid power component (usually a piston
rod or hydraulic motor shaft or the position of load is termed as limit switch. The actuation
of a limit switch provides an electrical signal that causes an appropriate system response.
− Limit switches perform the same function as push button switches. Push buttons are
manually actuated whereas limit switches are mechanically actuated.
− There are two types classification of Limit switches depending upon method of actuations
of contacts
a) Lever actuated contacts
b) Spring loaded contacts
− In lever type limit switches, the contacts are operated slowly. In spring type limit switches,
the contacts are operated rapidly. Figure 1.3 shows a simplified cross sectional view of a
limit switch and its symbol.
Figure 1.3 - Cross sectional view of a limit switch
1.11.3 Pressure switches
− A pressure switch is a pneumatic-electric signal converter. Pressure switches are used to
sense a change in pressure, and opens or closes an electrical switch when a predetermined
pressure is reached. Bellow or diaphragm is used to sense the change of pressure.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.15
− Figure 1.4 shows a diaphragm type of pressure switch. When the pressure is applied at the
inlet and when the pre-set pressure is reached, the diaphragm expands and pushes the spring
loaded plunger to make/break contact.
Figure 1.4 - Cross sectional view of a pressure switch
1.11.4 Solenoids
− Electrically actuated directional control valves form the interface between the two parts of
an electro-pneumatic control. The most important tasks of electrically actuated DCVs
include.
i) Switching supply air on or off
ii) Extension and retraction of cylinder drives
− Electrically actuated directional control valves are switched with the aid of solenoids. They
can be divided into two groups:
i) Spring return valves only remain in the actuated position as long as current
flows through the solenoid
ii) In the initial position, all solenoids of an electrically actuated DCVs are de-
energized and the solenoids are inactive. A double valve has no clear initial
position, as it does not have a return spring. The possible voltage levels for
solenoids are 12 V DC, 12V AC, 12 V 50/60 Hz, 24V 50/60 Hz, 110/120V
50/60 Hz, 220/230V 50/60 Hz.
iii) Double solenoid valves retain the last switched position even when no current flows
through the solenoid.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.16
1.11.5 Relays
− A relay is an electro magnetically actuated switch. It is a simple electrical device used for
signal processing. Relays are designed to withstand heavy power surges and harsh
environment conditions. When a voltage is applied to the solenoid coil, an electromagnet
field results. This causes the armature to be attracted to the coil core.
− The armature actuates the relay contacts, either closing or opening them, depending on the
design. A return spring returns the armature to its initial position when the current to the coil
is interrupted. Cross sectional view of a relay is shown in Figure 1.5.
− A large number of control contacts can be incorporated in relays in contrast to the case of a
push button station. Relays are usually designated as K1, K2, and K3 etc. Relays also
possess interlocking capability that is an important safety feature in control circuits.
Interlocking avoids simultaneous switching of certain coils.
1.11.6 Timer or Time delay relays
− Timers are required in control systems to effect time delay between work operations. This is
possible by delaying the operation of the associated control element through a timer. Most
of the timers we use is Electronic timers. There are two types of time relay
Figure 1.5 - Cross sectional view of a relay
i) Pull in delay ( on –delay timer)
ii) Drop –out delay (off delay timer)
− In the on-delay timer, shown in Figure cc, when push button PB is pressed (ON), capacitor
C is charged through potentiometer R1 as diode D is reverse –biased. The time taken to
charge the capacitor, depends on the resistance of the potentiometer (R1) and the
capacitance(C) of the capacitor. By adjusting the resistance of the potentiometer, the
required time delay can be set. When the capacitor is charged sufficiently, coil K is
energized, and its contacts are operated after the set time delay. When the push button is
released (OFF), the capacitor discharges quickly through a small resistance (R2) as the
diode by passes resistor R1, and the contacts of relay (K) return to their normal position
without any delay.

Oil Hydraulics and Pneumatics (2171912) 1. Introduction
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 1.17
− In the off-delay timer, the contacts are operated without any delay when the push button is
pressed (ON). The contacts return to the normal position after the set delay when the push
button is released (OFF).
− The construction and symbols of the on-delay and off-relay timers are given in Figure1.6.
Figure 1.6 - Construction features of timer and its symbols
1.11.7 Temperature Switch
− Temperature switches automatically senses a change in temperature and opens or closes an
electrical switch when a predetermined temperature is reached. This switch can be wired
either normally open or normally closed.
− Temperature switches can be used to protect a fluid power system from serious damage
when a component such as a pump or strainer or cooler begins to malfunction.


Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.1
2 SYSTEM COMPONENTS, HYDRAULIC OILS, FLUID PROPERTIES AND FILTER
Course Contents
2.1 Hydraulic oils and fluid properties
2.2 Types of hydraulic fluids
2.3 Properties of Fluids
2.4 Physical characteristics of
hydraulic fluid
2.5 Filters and strainers
2.6 Types of filters

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.2
2.1 HYDRAULIC OILS AND FLUID PROPERTIES
A hydraulic fluid power system may be defined as a means of power transmission in which a
relatively incompressible fluid is used as the power transmitting media. The primary purpose
of a hydraulic system is the transfer of energy from one location to another and the
conversion of this energy to useful work. Hydraulic power is usually generated by pumps and
the energy generated is converted to useful work by hydraulic cylinders or other actuators
(linear or rotary). The transmission of this energy is accomplished by movement of the
hydraulic fluid through metal tubes or elastomeric hoses, while the control of the power is
achieved by means of values. As no hydraulic system can perform the assigned task without
the hydraulic fluid, this fluid is of utmost importance in a hydraulic system.
The broad tasks of hydraulic oil can be classified broadly as follows:
l. To transfer hydraulic energy
2. To lubricate all parts
3. To avoid corrosion
4. To remove impurities and abrasion
5. To dissipate heat
2.2 TYPES OF HYDRAULIC FLUIDS
There are different types of hydraulic fluids that have the required properties. In general
while selecting suitable fluid, a few important factors are to be considered.
Its compatibility with seals, bearing and other components.
Its viscosity and environmental stability are also considered.
1. Petroleum-based fluids: Mineral oils are the petroleum-based oils that are the most
commonly used hydraulic fluids. Basically, they possess most of the desirable characteristics:
they are easily available and are economical.
- In addition, they offer the best lubrication ability, least corrosion problems and are
compatible with most seal materials. The only major disadvantage of these fluids is their
flammability.
- They pose fire hazards, mainly from the leakages, in high-temperature environments such as
steel industries, etc. Mineral oils are good for operating temperatures below 50°C, at higher
temperatures, these oils lose their chemical stability and form acids, varnishes, etc.
- All these lead to the loss of lubrication characteristics, increased wear and tear, corrosion
and related problems. Fortunately, additives are available that improve chemical stability,
reduce oxidation, foam formation and other problems.
- A petroleum oil is still by far the most highly used base for hydraulic fluids. In general,
petroleum oil has the following properties:
Excellent lubricity
Higher demulsibility

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.3
More oxidation resistance
Higher viscosity index
Protection against rust
Good sealing characteristics
Easy dissipation of heat
Easy cleaning by filtration
Most of the desirable properties of the fluid, if not already present in the crude oil, can
be incorporated through refining or adding additives.
A principal disadvantage of petroleum oil is that it burns easily. For applications where fire
could be a hazard, such as heat treating, hydroelectric welding, die casting, forging and many
others, there are several types of fire-resistant fluids available.
2. Emulsions: Emulsions are a mixture of two fluids that do not chemically react with others.
Emulsions of petroleum-based oil and water are commonly used. An emulsifier is normally
added to the emulsion, which keeps liquid as small droplets and remains suspended in the
other liquid. Two types of emulsions are in use:
A. Oil-in-water emulsions: This emulsion has water as the main phase, while small
droplets of oil are dispersed in it. Generally, the oil dilution is limited, about 5%;
hence, it exhibits the characteristics of water.
- Its limitations are poor viscosity, leading to leakage problems, loss in volumetric
efficiency and poor lubrication properties. These problems can be overcome to a
greater extent by using certain additives. Such emulsions are used in high-
displacement, low-speed pumps (such as in mining applications).
B. Water-in-oil emulsions: Water-in-oil emulsions, also called inverse emulsions, are
basically oil based in which small droplets of water are dispersed throughout the oil
phase.
- They are most popular fire-resistant hydraulic fluids. They exhibit more of an oil-
like characteristic; hence, they have good viscosity and lubrication properties.
- The commonly used emulsion has a dilution of 60% oil and 40% water. These
emulsions are good for operations at 25°C, as at a higher temperature, water
evaporates and leads to the loss of fire-resistant properties.
3. Water glycol: Water glycol is another non-flammable fluid commonly used in aircraft
hydraulic systems.
- It generally has a low lubrication ability as compared to mineral oils and is not suitable for
high-temperature applications. It has water and glycol in the ratio of 1:1. Because of its
aqueous nature and presence of air, it is prone to oxidation and related problems. It needs to
be added with oxidation inhibitors.
- Enough care is essential in using this fluid as it is toxic and corrosive toward certain metals
such as zinc, magnesium and aluminium. Again, it is not suitable for high-temperature
operations as the water may evaporate.
- However, it is very good for low-temperature applications as it possesses high antifreeze
characteristics.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.4
4. Synthetic fluids: Synthetic fluid, based on phosphate ester, is another popular fire-
resistant fluid. It is suitable for high-temperature applications, since it exhibits good viscosity
and lubrication characteristics.
- It is not suitable for low-temperature applications.
- It is not compatible with common sealing materials such as nitrile. Basically being
expensive, it requires expensive sealing materials (viton).
- In addition, phosphate ester is not an environmental-friendly fluid. It also attacks aluminum
and paints.
5. Vegetable oils: The increase in the global pollution has led to the use of more
environmental-friendly fluids.
- Vegetable-based oils are biodegradable and are environmental safe. They have good
lubrication properties, moderate viscosity and are less expensive. They can be formulated to
have good fire resistance characteristics with certain additives.
- Vegetable oils have a tendency to easily oxidize and absorb moisture.
- The acidity, sludge formation and corrosion problems are more severe in vegetable oils than
in mineral oils. Hence, vegetable oils need good inhibitors to minimize oxidation problems.
6. Biodegradable: As more and more organizations are understanding their social
responsibility and are turning toward eco-friendly machinery and work regime, a
biodegradable hydraulic fluid is too becoming a sought after product in the dawn of an
environmentalist era.
- Biodegradable hydraulic fluids, alternatively known as bio-based hydraulic fluids, Bio-
based hydraulic fluids use sunflower, rapeseed, soybean, etc., as the base oil and hence cause
less pollution in the case of oil leaks or hydraulic hose failures.
- These fluids carry similar properties as that of a mineral oil–based anti-wear hydraulic fluid,
Hypothetically, if a company plans to introduce bio-based fluids into the hydraulic
components of the machinery and the permissible operating pressure of hydraulic
components is reduced to 80%, then it would inversely lead to a 20% reduction in breaking-
out force owing to the 20% reduction in excavator’s operating pressure.
- It is so because a reduction in the operating pressure of a system leads to a reduction in
actuator force.
- Besides, the transformation would not only include the cost of fluid and flushing of
machinery to transcend from a mineral oil to vegetable oil repeatedly but also include the
derating costs of machinery.
7. Fire Resistance: There are many hazardous applications where human safety requires the
use of a fire-resistant fluid. Examples include coal mines, hot metal processing equipment,
aircraft and marine fluid power systems.
- A fire-resisting fluid is one that can be ignited but does not support combustion when the
ignition source is removed.
- Flammability is defined as the ease of ignition and ability to propagate the flame.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.5
- The following are the usual characteristics tested in order to determine the flammability of
hydraulic fluids:
1. Flash point: The temperature at which an oil surface gives off sufficient vapours
to ignite when a flame is passed over the surface.
2. Fire point: The temperature at which an oil releases sufficient vapours to support
combustion continuously for 5 s when a flame is passed over the surface.
3. Autogenously ignition temperature: The temperature at which ignition occurs
spontaneously.
- The fire-resistant fluids are designated as follows:
1. HFA: A high-water-content fluid or HWCF (80% or more), for example, water–oil
emulsions.
2. HFB: This is water–oil emulsion containing petroleum oil and water.
3. HFC: This is a solution of water and glycol.
4. HFD: This is a synthetic fluid, for example, phosphates or phosphate–petroleum
blends.
- The commonly used hydraulic liquids are petroleum derivatives; consequently, they burn
vigorously once they reach a fire point. For critical applications, artificial or synthetic
hydraulic fluids are used that have fire resistance.
- Fire-resistant fluids have been developed to reduce fire hazards. There are basically four
different types of fire-resistant hydraulic fluids in common use:
1. Water–glycol solution: This type consists of an actual solution of 40% water and
60% glycol. These solutions have high-viscosity-index values, but as the viscosity rises, the
water evaporates. The operating temperature ranges run from −20°C to about 85°C.
2. Water-in-oil emulsions: This type consists of about 40% water completely
dispersed in a special oil base. It is characterized by small droplets of water completely
surrounded by oil. The operating temperature range runs from −30°C to about 80°C. As is the
case with water–glycol solutions, it is necessary to replenish evaporated water to maintain
proper viscosity.
3. Straight synthetics: This type is chemically formulated to inhibit combustion and
in general has the highest fire-resistant temperature. The disadvantages of straight synthetics
include low viscosity index, incompatibility with most natural or synthetic rubber seals and
high cost.
4. High-water-content fluids (HWCFs): This type consists of about 90% water and
10% concentrate (designated as 90/10). The concentrate consists of fluid additives that
improve viscosity, lubrication, rust protection and protection against bacteria growth. The
maximum operating temperature should be held to 50°C to minimize evaporation.
- The advantages of HWCF are as follows:
1. Fire resistance due to a high flash point of about 150°C.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.6
2. Lower system operating temperature due to good heat dissipation.
3. Biodegradable and environmental-friendly additives.
4. High viscosity index.
5. Cleaner operation of the system.
6. Low cost of concentrate and storage.
- The disadvantages of HWCF are as follows:
1. Greater contamination due to higher densities of fluids.
2. High evaporation loss.
3. Faster corrosion due to oxidation.
4. pH value to be maintained between 7.5 and 9.0.
5. Promotion of bacterial growth and filtration difficulties due to the acidic nature of
fluids.
Performance of HWCFs can be improved using additives such as
1. Anti-wear additives. 2. Anti-foaming additives.
3. Corrosion inhibitors. 4. Biocides to kill water-borne bacteria.
5. Emulsifying agents. 6. Flocculation promoters.
7. Deionization agents. 8. Oxidation inhibitors.
9. Anti-vaporizing agents.
2.3 PROPERTIES OF FLUIDS
For a fluid to perform efficiently, it must possess certain properties. The various properties
required for an ideal hydraulic fluid are as follows:
1. Ideal viscosity.
2. Good lubrication capability.
3. Demulsibility.
4. Good chemical and environmental stability.
5. Incompressibility.
6. Fire resistance.
7. Low flammability.
8. Foam resistance.
9. Low volatility.
10. Good heat dissipation.
11. Low density.
12. System compatibility.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.7
- It is almost impossible to achieve all these properties in a hydraulic fluid. Although we can
select a good fluid with desirable properties, some of the characteristics of a fluid change
with usage.
- For example, it is common for the temperature of a fluid to rise due to friction in the system,
which reduces the viscosity of the fluid, which in turn increases leakage and reduces
lubrication ability.
- A fluid gets oxidized and becomes acidic with usage. Certain additives are added to
preserve the desirable properties and to make the fluid more stable.
- Some of the desirable properties and their influence on a hydraulic fluid are discussed
briefly in the following sub-sections.
Ideal Viscosity
- The most basic desirable property of a hydraulic fluid is optimum viscosity. It is a measure
of a fluid’s resistance to flow.
- When viscosity is low, the fluid flows easily. On the other hand, when viscosity is high, the
fluid flows with difficulty. A low viscous fluid is thin and can flow easily, whereas a high
viscous fluid is thick and cannot flow easily.
- The viscosity of a fluid should be high enough to seal the working gap between the parts
and prevent leakage but should be low enough to cause easy flow throughout the system.
- A high-viscosity fluid requires high energy to overcome the internal friction, resulting in
excess heat generation.
- On the other hand, a low-viscosity fluid flows easily but causes leakages and reduces the
volumetric and overall efficiency. Therefore the hydraulic fluid should have an optimum
viscosity.
1. High viscosity:
High resistance to flow.
Increased power consumption due to frictional loss.
High temperature caused by friction.
Increased pressure drop because of the resistance.
Possibility of sluggish or slow operation.
Difficulty in separating air from oil in a reservoir.
Greater vacuum at the pump inlet, causing cavitation. Higher system noise level.
2. Low viscosity:
Increased internal leakage.
Excessive water.
Possibility of decreased pump efficiency, causing slower operation of the
actuator. Increased temperature resulting from leakage losses.
- There are two basic methods of specifying the viscosity of fluids: absolute and kinematic
viscosity. Viscosity index is an arbitrary measure of a fluid resistance to viscosity change
with temperature changes. Thus, viscosity is affected by temperature changes.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.8
- As temperature increases, the viscosity of a fluid decreases. A fluid that has a relatively
stable viscosity at temperature extremes has a high viscosity index. A fluid that is very thick
while cold and very thin while hot has a low viscosity index.
Lubrication Capability
- Hydraulic fluids must have good lubricity to prevent friction and wear between the closely
fitted working parts such as vanes of pumps, valve spools, piston rings and bearings.
- Wear is the removal of surface material due to the frictional force between two metal-to-
metal contacts of surfaces. This can result in a change in dimensional tolerances, which can
lead to improper functioning and failure of the components.
- Hydraulic oil should have a good lubricating property. That is, the film so formed should be
strong enough that it is not wiped out by the moving parts.
Demulsibility
- The ability of a hydraulic fluid to separate rapidly from moisture and successfully resist
emulsification is known as “demulsibility.”
- If an oil emulsifies with water, the emulsion promotes the destruction of lubricating and
sealant properties. Highly refined oils are basically water resistant by nature.
Good Chemical and Environmental Stability (Oxidation and Corrosion Resistance)
- For a good hydraulic fluid, a good chemical and environmental stability is desirable. Most
fluids are vulnerable to oxidation, as they come in contact with oxygen in air.
- Mineral oils or petroleum-based oils (widely used in hydraulic systems) contain carbon and
hydrogen molecules, which easily react with oxygen.
- The oxidation products are highly soluble in oil and being acidic in nature they can easily
corrode metallic parts.
- The soluble acidic products cause corrosion, whereas insoluble products make the operation
sluggish. Oxidation leads to deterioration in the chemical nature of fluid, which may form
some chemical sledges, gum or varnish at low velocity or stagnation points in the system.
- Many factors influence the rate of oxidation, such as temperature, pressure, moisture and so
on. Temperature is the most affecting one, as the rate of oxidation increases severely with rise
in temperature.
- The moisture entering the hydraulic system with air causes the parts made of ferrous
materials to rust. Rust is a chemical reaction between iron or steel and oxygen.
- Corrosion, on the other hand, is the chemical reaction between a metal and an acid. The
result of rusting and corrosion is the “eating away” of the metal surfaces of the hydraulic
components. Rust and corrosion cause excessive leakage between moving parts.
- Rust and corrosion can be prevented by incorporating additives that plate on the metal
surface to prevent chemical reaction.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.9
Neutralization Numbers
- Neutralization number is a measure of the acidity or alkalinity of hydraulic oil. This is
referred to as the pH value of the oil. High acidity causes the oxidation rate in oil to increase
rapidly.
Low Flammability
- A fire-resistant fluid is one that can get ignited in the presence of an ignition source but does
not support combustion when the source is removed. This characteristic is defined as
flammability.
- It refers to the ease with which a fluid gets ignited and propagates the flame. Hence, it is
desirable to have a low flammability for a hydraulic fluid.
Foam Resistance
- Air can be present in a hydraulic fluid in two forms: dissolved and entrained. For example,
if the return line to the reservoir is not submerged, the jet of oil entering the liquid surface
will carry air with it.
- This causes air bubbles to form in the oil. If these bubbles rise to the surface too slowly,
they will be drawn into the pump intake.
- This can cause pump damage due to cavitation.
- Another adverse effect of entrained and dissolve air is a great reduction in the bulk
modulus of the hydraulic fluid.
Low Volatility
- A fluid should possess low vapour pressure or high boiling point. The vapour pressure of a
fluid varies with temperature and hence the operating temperature range of the system is
important in determining the stability of the fluid.
Good Heat Dissipation
- A hydraulic fluid should have a high heat dissipation capability. The temperature of a fluid
shoots up if its heat dissipation characteristics are poor.
- Too high fluid temperature can cause a system to malfunction. If the fluid overheats, it may
cause the following:
1. Give off vapor and cause cavitation of the pump.
2. Increase the rate of oxidation causing its rapid deterioration by producing sledges,
varnishes, etc., thus shortening its useful life.
3. Reduce viscosity of the fluid resulting in increased leakage, both internal and
external.
4. Cause thermal distortion in components.
5. Damage seals and packaging owing to embrittlement.
- Hydraulic systems should be designed so that a heat balance occurs at a satisfactory
operating temperature.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.10
Low Density
- The relative density of a mineral oil is 0.9 (the exact value depends on the base oil and the
additive used). Synthetic fluids can have a relative density greater than 1. T
- he relative density is important when designing the layout of pumps and reservoir.
System Compatibility
- A hydraulic fluid should be inert to materials used in or near the hydraulic equipment. If the
fluid in anyway attacks, destroys, dissolves or changes the parts of hydraulic system, the
system may lose its functional efficiency and may start malfunction.
Stable Chemically and Physically
- Fluid characteristics should remain unchanged during an extended useful life and during
storage.
- The fluid in a working hydraulic system is subjected to violent usage-large pressure
fluctuations, shock, turbulence, aeration, cavitation, water and particulate contamination, high
shear rates, and large temperature variations.
- Since many aspects of stability are chemical in nature, the temperatures to which the fluid
will be exposed is an important criterion in the selection of a. hydraulic fluid.
Good Heat Dissipation
- An important requirement of the fluid is to carry heat away from the working parts. Pressure
drops, mechanical friction, fluid friction, leakages, all generate heat.
- The fluid must carry the generated heat away and readily dissipate it to the atmosphere or
coolers. Therefore high thermal conductivity and high specific heat values are desirable in the
fluid chosen.
High Bulk Modulus
- In general, oil is taken as incompressible. However, in practice, all materials are
compressible and so is oil.
- The bulk modulus is a measure of the degree of compressibility of the fluid and is the
reciprocal of compressibility.
- The higher the bulk modulus, the lesser the material will be compressed with increasing
pressure.
- Bulk modulus is an important characteristic of a hydraulic fluid because of control
problems, especially in servo hydraulics.
Low Coefficient of Expansion
- A low coefficient of expansion is usually desirable in a hydraulic fluid to minimise the total
volume of the system required at the operating temperature.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.11
2.4 PHYSICAL CHARACTERISTICS OF HYDRAULIC FLUID
Density
- Density may be defined as the mass of oil per unit volume. The unit will be kg/cm3 or
kg/m3.
𝐷𝑒𝑛𝑠𝑖𝑡𝑦 (𝜌) =𝑚𝑎𝑠𝑠
𝑣𝑜𝑙𝑢𝑚𝑒
- Density of any liquid is generally measured by an instrument called hydrometer. If one dips
the instrument into the liquid or oil, the density can be directly read.
- Hydraulic oils which are used in industrial hydraulic systems may have a density of 0.8 to
0.9 gm/cm3.
Table 2.1 - Density characteristics of hydraulic fluids
Fluid Density (kg/m3)
Shell Tellus ISO 32 mineral oil
875
Shell HFB 60%oil,40%oil
933
Shell HFC 60%glycol,40%water
1084
Shell HFD phosphate ester 1125
Shell Naturelle HFE 32
918
Specific Gravity
- Specific gravity of oil is defined as the ratio of densities of oil and water. Specific gravity of
a fluid is important in those cases where the overall system weight must be kept minimum.
𝑆𝑝𝑒𝑐𝑖𝑓𝑖𝑐 𝐺𝑟𝑎𝑣𝑖𝑡𝑦 =𝐷𝑒𝑛𝑠𝑖𝑡𝑦 𝑜𝑓 𝑜𝑖𝑙
𝐷𝑒𝑛𝑠𝑖𝑡𝑦 𝑜𝑓 𝑤𝑎𝑡𝑒𝑟
- As per standards, density of water is accepted as 1. Hence if we say that the specific gravity
of oil is 0.80, then the logical inference is that the oil in question has a density of 0.8 gm/cm3.
- Specific gravity and density may seem to be the same; it is necessary that we understand the
mathematical relationship so that while solving problems we are not confused.
- A heavy fluid can cause pump cavitation and resultant malfunction of the system.
Specific Weight
- Specific weight of hydraulic oil is calculated by multiplying density of oil by acceleration
due to gravity.
𝑆𝑝𝑒𝑐𝑖𝑓𝑖𝑐 𝑊𝑒𝑖𝑔ℎ𝑡 (𝛾) =𝑊𝑒𝑖𝑔ℎ𝑡
𝑉𝑜𝑙𝑢𝑚𝑒

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.12
Viscosity
- Viscosity is a very important property of oil. It is the measure of the ability of e liquid to
flow. It can actually be defined as the resistance to flow.
- To understand the physical concept of viscosity, let us take few simple examples. When or -
swims in a pool of water, one experiences a resistance to the motion.
- One might have noticed that when a liquid kept in a container is stirred and left to itself.6c
motion will disappear after sometime. This indicates that there is some kind d frictional force
in all types of fluids. This force is called the viscous force.
2.5 FILTERS AND STRAINERS
- For proper operation and long service life of a hydraulic system, oil cleanliness is of prime
importance. Hydraulic components are very sensitive to contamination.
- The cause of majority of hydraulic system failures can be traced back to contamination.
Hence, filtration of oil leads to proper operation and long service life of a hydraulic system.
- Strainers and filters are designed to remove foreign particles from the hydraulic fluid. They
can be differentiated by the following definitions:
1. Filters: They are devices whose primary function is the retention, by some fine porous
medium, of insoluble contaminants from fluid.
- Filters are used to pick up smaller contaminant particles because they are able to
accumulate them better than a strainer.
- Generally, a filter consists of fabricated steel housing with an inlet and an outlet. The filter
elements are held in position by springs or other retaining devices.
- Because the filter element is not capable of being cleaned, that is, when the filter becomes
dirty, it is discarded and replaced by a new one. Particle sizes removed by filters are
measured in microns.
- The smallest sized particle that can be removed is as small as 1 μm. A strainer is a device
whose function is to remove large particles from a fluid using a wire screen.
- The smallest sized particle that can be removed by a strainer is as small as 0.15 mm or 150
μm.
2. Hydraulic strainers: A strainer is a coarse filter. Fluid flows more or less straight through
it. A strainer is constructed of a fine wire mesh screen or of screening consisting of a
specially processed wire of varying thickness wrapped around metal frames.
- It does not provide as fine a screening action as filters do, but offers less resistance to flow
and is used in pump suction lines where pressure drop must be kept to a minimum.
- A strainer should be as large as possible or wherever this is not practical, two or more may
be used in parallel.
2.5.1 Causes of Contamination
The causes of contamination are as follows:
Contaminants left in the system during assembly or subsequent maintenance work.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.13
Contaminants generated when running the system such as wear particles, sludge and
varnish due to fluid oxidation and rust and water due to condensation.
Contaminants introduced into the system from outside. These include using the wrong
fluid when topping up and dirt particles introduced by contaminated tools or repaired
components.
2.6 TYPES OF FILTERS
Filters may be classified as follows:
1. According to the filtering methods:
Mechanical filters: This type normally contains a metal or cloth screen or a series of
metal disks separated by thin spacers. Mechanical filters are capable of removing only
relatively coarse particles from the fluid.
Absorption filters: These filters are porous and permeable materials such as paper,
wood pulp, diatomaceous earth, cloth, cellulose and asbestos. Paper filters are
impregnated with a resin to provide added strength. In this type of filters, the particles
are actually absorbed as the fluid permeates the material. Hence, these filters are used
for extremely small particle filtration.
Adsorbent filters: Adsorption is a surface phenomenon and refers to the tendency of
particles to cling to the surface of the filters. Thus, the capacity of such a filter
depends on the amount of surface area available. Adsorbent materials used include
activated clay and chemically treated paper.
2. According to the size of pores in the material:
Surface filters: These are nothing but simple screens used to clean oil passing
through their pores. The screen thickness is very thin and dirty unwanted particles are
collected at the top surface of the screen when the oil passes, for example, strainer.
Depth filters: These contain a thick-walled filter medium through which the oil is
made to flow and the undesirable foreign particles are retained. Much finer particles
are arrested and the capacity is much higher than surface filters.
3. According to the location of filters:
Intake or inline filters (suction strainers): These are provided first before the pump
to protect the pump against contaminations in the oil as shown in Fig. 2.1. These
filters are designed to give a low pressure drop, otherwise the pump will not be able to
draw the fluid from the tank. To achieve low pressure drop across the filters, a coarse
mesh is used. These filters cannot filter out small particles.
Advantages of suction filters:
(a) A suction filter protects the pump from dirt in the reservoir. Because the suction
filter is outside the reservoir, an indicator telling when the filter element is dirty can
be used.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.14
Figure 2.1 - Suction filter
(b) The filter element can be serviced without dismantling the suction line or
reservoir (easy to maintain).
Disadvantages of suction filters:
(a) A suction filter may starve the pump if not sized properly.
Pressure line filters (high-pressure filters): These are placed immediately after the
pump to protect valves and actuators and can be a finer and smaller mesh (Fig. 2.2).
They should be able to withstand the full system pressure. Most filters are pressure
line filters.
Figure 2.2 - Pressure filter

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.15
Advantages of a pressure line filter:
(a) A pressure filter can filter very fine contaminants because the system pressure is
available to push the fluid through the element.
(b) A pressure filter can protect a specific component from the harm of deteriorating
particles generated from an upstream component.
Disadvantages of a pressure line filter:
(a) The housing of a pressure filter must be designed for high pressure because it
operates at full system pressure. This makes the filter expensive.
(b) If pressure differential and fluid velocity are high enough, dirt can be pushed
through the element or the element may tear or collapse.
Return line filters (low-pressure filters): These filters filter the oil returning from
the pressure-relief valve or from the system, that is, the actuator to the tank (Fig. 2.3).
They are generally placed just before the tank. They may have a relatively high
pressure drop and hence can be a fine mesh. These filters have to withstand low
pressure only and also protect the tank and pump from contamination.
Figure 2.3 - Return line filter
Advantages of a return line filter:
(a) A return line filter catches the dirt in the system before it enters the reservoir.
(b)The filter housing does not operate under full system pressure and is therefore less
expensive than a pressure filter.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.16
Disadvantages of a return line filter:
(a) There is no direct protection for circuit components.
(b) In return line full flow filters, flow surges from discharging cylinders, actuators
and accumulators must be considered when sizing.
4. Depending on the amount of oil filtered by a filter:
Full flow filters: In this type, complete oil is filtered. Full flow of oil must enter the
filter element at its inlet and must be expelled through the outlet after crossing the
filter element fully (Fig. 2.4). This is an efficient filter. However, it incurs large
pressure drops. This pressure drop increases as the filter gets blocked by
contamination.
Figure 2.4 - Full flow filter
Proportional filters (bypass filters): In some hydraulic system applications, only a portion
of oil is passed through the filter instead of entire volume and the main flow is directly passed
without filtration through a restricted passage (Fig. 2.5).
Figure 2.5 - Proportional filter
2.6.1 Beta Ratio of Filters
- Filters are rated according to the smallest size of particles they can trap. Filter ratings are
identified by nominal and absolute values in micrometers.
- A filter with a nominal rating of 10 μm is supposed to trap up to 95% of the entering
particles greater than 10 μm in size.
- The absolute rating represents the size of the largest pore or opening in the filter and thus
indicates the largest size particle that could go through. Hence, absolute rating of a 10 μm
nominal size filter would be greater than 10 μm.
- A better parameter for establishing how well a filter traps particles is called the beta ratio or
beta rating.

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.17
- The beta ratio is determined during laboratory testing of a filter receiving a steady-state
flow containing a fine dust of selected particle size.
- The test begins with a clean filter and ends when pressure drop across the filter reaches a
specified value indicating that the filter has reached the saturation point. This occurs when
contaminant capacity has been reached.
- By mathematical definition, the beta ratio equals the number of upstream particles of size
greater than Nμm divided by the number of downstream particles having size greater than
Nμm where N is the selected particle size for the given filter. The ratio is represented by the
following equation:
Beta ratio = No. of upstream particles of size > N μm
No. of downstream particles of size > N μm
- A beta ratio of 1 would mean that no particle above specified N are trapped by the filter. A
beta ratio of 50 means that 50 particles are trapped for every one that gets through. Most
filters have a beta ratio greater than 75:
Beta ratio = No. of upstream particles − No. of downstre am particles
No. of upstream particles

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.18
Table 2.2 – Hydraulic and Pneumatic symbols as per
Lines
Continuous line (for) flow line
Dashed line (for) pilot, drain
Envelope (for) long and short dashes
around two or more component
symbols.
Circular
Large circle - pump, motor
Small circle - Measuring devices
Semi-circle - rotary actuator
Square
-One square - pressure control function -Two or three adjacent squares - directional control
Diamond
Diamond - Fluid conditioner (filter, separator, lubricator, heat exchanger)
Miscellaneous Symbols
Spring
Flow Restriction
Triangle
Solid - Direction of Hydraulic Fluid Flow
Open - Direction of Pneumatic flow
Pumps and Compressors
Fixed Displacement hydraulic pump symbols
Unidirectional
Bidirectional
Unidirectional
Bidirectional

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.19
Compressor symbol
Motors
Fixed displacement hydraulic motor symbol
Unidirectional
Bidirectional
Variable displacement hydraulic motor symbol
Unidirectional
Bidirectional
Pneumatic motor symbol
Unidirectional
Bidirectional
Rotary Actuator symbol
Hydraulic
Pneumatic
Cylinders
Single acting cylinder symbols
Returned by external force
Returned by spring or extended by spring
force
Double acting cylinder symbols
Single piston rod (fluid required to
extend and retract)
Double ended piston rod
Cylinders with cushions symbols
Single fixed cushion
Double fixed cushion
Single adjustable cushion
Double adjustable cushion
Directional Control Valve symbols
Directional control valve (2 ports / 2 positions)

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.20
Normally closed directional control valve
with 2 ports and 2 finite positions Normally open directional control valve
with 2 ports and 2 finite positions
Directional control valve (3 ports / 2 positions)
Normally closed directional control valve
with 3 ports and 2 finite positions Normally open directional control valve
with 3 ports and 2 finite positions
Directional control valve (4 ports / 2 positions)
Directional control valve with 4 ports and 2 finite positions
Directional control valve (4 ports / 3 positions)
Directional control valve with 4 ports and 3 finite positions (center position can have various flow paths)
Directional control valve (5 ports / 2 positions) normally a pneumatic valve
Directional control valve with 5 ports and 2 finite positions
Directional control valve (5 ports / 3 positions) Normally a pneumatic valve
Directional control valve with 5 ports and 3 finite positions
Control Method Operator symbols for valves
Manual Control
General symbol of a valve's manual
operator (without showing the control
type)
Pushbutton
Lever
Foot pedal
Mechanical Valve Control
Plunger or tracer
Spring (used on one side of a valve to
hold it in the normally open or normally
closed state)

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.21
Roller
Roller (one direction only)
Electrical/Solenoid Valve Control
Solenoid (the one side's winding shown)
Pilot Operation
(uses pressure to actuate valve)
Pneumatic actuated pilot
Hydraulic actuated pilot
Pilot operated two-stage valve (uses a second lesser force to actuate the pilot
actuation of the valve)
Pneumatic: Solenoid first stage
Pneumatic: Air pilot second stage
Hydraulic: Solenoid first stage
Hydraulic: Hydraulic pilot second stage
Check valves, Shuttle valves, Rapid Exhaust valves
Check valve symbol-free flow one
direction, blocked flow in other direction
Pilot operated check valve symbol, pilot
to close
Pilot operated check valve symbol, pilot
to open
Shuttle valve
Rapid exhaust valve/Pneumatic
Pressure Control Valves
Pressure Relief Valve (safety valve) normally closed
Line pressure is limited to the setting of
the valve, secondary part is directed to
tank.
Proportional Pressure Relief Valve

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.22
Line pressure is limited to and
proportional to an electronic signal
Sequence Valve
When the line pressure reaches the setting
of the valve, valve opens permitting flow
to the secondary port. The pilot must be
externally drained to tank.
Pressure Reducing valve (Hydraulic Pressure Regulator)
Pressure downstream of valve is limited to the setting of the valve
Flow Control Valves
Throttle valve
Adjustable output flow
Flow Control valves
Flow control valve with fixed
output (variations in inlet pressure do not
affect rate of flow
Flow control valve with fixed output and
relief port to reservoir with relief for
excess flow (variations in inlet pressure
do not affect rate of flow)
Flow control valve with variable output
Flow control valve with fixed orifice
Flow control valve with metered flow
toward right free flow to left
Flow control valve with pressure
compensated flow control fixed output
flow regardless of load
Flow control valve with pressure and
temperature compensated
Shut-Off Valve
Shut-Off Valve Simplified symbol

Oil Hydraulics and Pneumatics (2171912) 2. System Components, Hydraulic Oils, Fluid Properties and Filter
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 2.23
Accumulators
Accumulator symbol (Stores Pressure)
Reservoir (Tank)
Reservoir symbol (Holds Fluid medium of
your system)
Filters, Water Traps, Lubricators and Miscellaneous Apparatus
Filter or Strainer
Water Trap
Filter with water trap
Air Dryer
Lubricator
Conditioning unit (FRL, Pressure Regulator)
Heat Exchangers


Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.1
3 HYDRAULIC PUMPS, MOTORS AND ACTUATORS
Course Contents
3.1 Hydraulic pumps
3.2 Linear actuators
3.3 Types of cylinder
3.4 Rotary actuators
3.5 Classification of Hydraulic
Motors
3.6 Hydrostatic transmission
system

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.2
3.1 HYDRAULIC PUMPS
A pump will have an inlet called suction and an outlet called delivery. It converts mechanical
energy in to hydraulic energy. Pump is also known as heart of hydraulic system. The basic
principle is that Due to mechanical action, the pump created partial vacuum at its inlet. This
permits atmospheric pressure to force the fluid through the inlet line and in to the pump, then
pump pushes the fluid into the hydraulic system.
− These are mainly classified into two categories:
(a) Non-positive displacement pumps (Hydrodynamic/Rotodynamic)
(b) Positive displacement pumps (Hydrostatic)
(a) Non-positive displacement pumps (Hydrodynamic/Rotodynamic)
− In these pumps the fluid is pressurized by the rotation of the propeller and the fluid pressure
is proportional to the rotor speed. These pumps can not withstanding high pressures and
generally used for low-pressure and high-volume flow applications.
− The fluid pressure and flow generated due to inertia effect of the fluid. The fluid motion is
generated due to rotating propeller. These pumps provide a smooth and continuous flow but
the flow output decreases with increase in system resistance (load).
− Simply external work is imparted to fluid in the control volume in the form of kinetic
energy and change in pressure energy is almost negligible.
− The important advantages of non-positive displacement pumps are lower initial cost, less
operating maintenance because of less moving parts, simplicity of operation, higher
reliability and suitability with wide range of fluid etc. These pumps are primarily used for

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.3
transporting fluids and find little use in the hydraulic or fluid power industries. Centrifugal
pump is the common example of non-positive displacement pumps.
(b) Positive displacement pumps (Hydrostatic)
− These pumps deliver a constant volume of fluid in a cycle. The discharge quantity per
revolution is fixed in these pumps and they produce fluid flow proportional to their
displacement and rotor speed. These pumps are used in most of the industrial fluid power
applications. The output fluid flow is constant and is independent of the system pressure
(load).
− Simply the energy transferred to the fluid purely in pressure energy form and change in
kinetic energy is almost negligible. It is important to note that the positive displacement
pumps do not produce pressure but they only produce fluid flow.
− The important advantage associated with these pumps is that the high-pressure and low-
pressure areas (means input and output region) are separated and hence the fluid cannot leak
back due to higher pressure at the outlets. These features make the positive displacement
pump most suited and universally accepted for hydraulic systems.
− The important advantages of positive displacement pumps over non-positive displacement
pumps include capability to generate high pressures, high volumetric efficiency, high power
to weight ratio, change in efficiency throughout the pressure range is small and wider
operating range pressure and speed. Important positive displacement pumps are gears pumps,
vane pumps and piston pumps. The details of these pumps are discussed in the following
sections.
3.1.1 Gear Pumps
− Gear pump is a robust and simple positive displacement pump. It has two meshed gears
revolving about their respective axes. These gears are the only moving parts in the pump.
They are compact, relatively inexpensive and have few moving parts. The rigid design of the
gears and houses allow for very high pressures and the ability to pump highly viscous fluids.
These pump includes helical and herringbone gear sets (instead of spur gears), lobe shaped
rotors similar to Roots blowers (commonly used as superchargers), and mechanical designs
that allow the stacking of pumps. Based upon the design, the gear pumps are classified as:
(a) External gear pumps
(b) Lobe pumps
(c) Internal gear pumps
− Generally gear pumps are used to pump:
• Petrochemicals: Pure or filled bitumen, pitch, diesel oil, crude oil, lube oil etc.
• Chemicals: Sodium silicate, acids, plastics, mixed chemicals, isocyanates etc.
• Paint and ink
• Resins and adhesives
• Pulp and paper: acid, soap, lye, black liquor, kaolin, lime, latex, sludge etc.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.4
• Food: Chocolate, cacao butter, fillers, sugar, vegetable fats and oils, molasses,
animal food etc.
(a) External gear pumps
− The external gear pump consists of externally meshed two gears housed in a pump case as
shown in figure 3.1 one of the gears is coupled with a prime mover and is called as driving
gear and another is called as driven gear.
− The rotating gear carries the fluid from the tank to the outlet pipe. The suction side is
towards the portion whereas the gear teeth come out of the mesh.
− When the gears rotate, volume of the chamber expands leading to pressure drop below
atmospheric value. Therefore the vacuum is created and the fluid is pushed into the void due
to atmospheric pressure. The fluid is trapped between housing and rotating teeth of the gears.
− The discharge side of pump is towards the portion where the gear teeth run into the mesh
and the volume decreases between meshing teeth.
− The clearance between gear teeth and housing and between side plate and gear face is very
important and plays an important role in preventing leakage. In general, the gap distance is
less than 10 micrometres. The amount of fluid discharge is determined by the number of gear
teeth, the volume of fluid between each pair of teeth and the speed of rotation.
− The important drawback of external gear pump is the unbalanced side load on its bearings.
It is caused due to high pressure at the outlet and low pressure at the inlet which results in
slower speeds and lower pressure ratings in addition to reducing the bearing life.
− Gear pumps are most commonly used for the hydraulic fluid power applications and are
widely used in chemical installations to pump fluid with a certain viscosity.
Figure 3.1 - External gear pump

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.5
(b) Lobe pumps
− Lobe pumps work on the similar principle of working as that of external gear pumps.
However in Lobe pumps, the lobes do not make any contact like external gear pump (see
Figure 3.2).
− Lobe contact is prevented by external timing gears located in the gearbox. Similar to the
external gear pump, the lobes rotate to create expanding volume at the inlet.
− Now, the fluid flows into the cavity and is trapped by the lobes. Fluid travels around the
interior of casing in the pockets between the lobes and the casing. Finally, the meshing of the
lobes forces liquid to pass through the outlet port. The bearings are placed out of the pumped
liquid. Therefore the pressure is limited by the bearing location and shaft deflection.
− Lobe pumps are widely used in industries such as pulp and paper, chemical, food,
beverage, pharmaceutical and biotechnology etc.
− These pumps can handle solids (e.g., cherries and olives), slurries, pastes, and a variety of
liquids. A gentle pumping action minimizes product degradation.
− Lobe pumps are frequently used in food applications because they handle solids without
damaging the product. Large sized particles can be pumped much effectively than in other
positive displacement types. As the lobes do not make any direct contact therefore, the
clearance is not as close as in other Positive displacement pumps.
(c) Internal gear pumps
− Internal gear pumps are exceptionally versatile. They are often used for low or medium
viscosity fluids such as solvents and fuel oil and wide range of temperature. This is non-
pulsing, self-priming and can run dry for short periods. It is a variation of the basic gear
pump.
Figure 3.2 - Lobe pump

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.6
− It comprises of an internal gear, a regular spur gear, a crescent-shaped seal and an external
housing. The schematic of internal gear pump is shown in Figure 3.3.
− Liquid enters the suction port between the rotor (large exterior gear) and idler (small
interior gear) teeth. Liquid travels through the pump between the teeth and crescent. Crescent
divides the liquid and acts as a seal between the suction and discharge ports.
− When the teeth mesh on the side opposite to the crescent seal, the fluid is forced out
through the discharge port of the pump. This clearance between gears can be adjusted to
accommodate high temperature, to handle high viscosity fluids and to accommodate the wear.
− However, these pumps are not suitable for high speed and high pressure applications. Only
one bearing is used in the pump therefore overhung load on shaft bearing reduces the life of
the bearing.
Figure 3.3 - Internal gear pump
3.1.2 Vane Pumps
− In the previous topic we have studied the gear pumps. These pumps have a disadvantage of
small leakage due to gap between gear teeth and the pump housing. This limitation is
overcome in vane pumps.
− The leakage is reduced by using spring or hydraulically loaded vanes placed in the slots of
driven rotor.
− Vane pumps are available in a number of vane configurations including sliding vane,
flexible vane, swinging vane, rolling vane, and external vane etc.
− The operating range of these pumps varies from -32 °C to 260 °C.
− The schematic of vane pump working principle is shown in figure 3.4 Vane pumps generate
a pumping action by tracking of vanes along the casing wall.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.7
− The vane pumps generally consist of a rotor, vanes, ring and a port plate with inlet and
outlet ports.
Figure 3.4 - Schematic of working principle of vane pump
− The rotor in a vane pump is connected to the prime mover through a shaft. The vanes are
located on the slotted rotor.
− The rotor is eccentrically placed inside a cam ring as shown in the figure. The rotor is
sealed into the cam by two side plates.
− When the prime mover rotates the rotor, the vanes are thrown outward due to centrifugal
force. The vanes track along the ring.
− It provides a tight hydraulic seal to the fluid which is more at the higher rotation speed due
to higher centrifugal force. This produces a suction cavity in the ring as the rotor rotates. It
creates vacuum at the inlet and therefore, the fluid is pushed into the pump through the inlet.
The fluid is carried around to the outlet by the vanes whose retraction causes the fluid to be
expelled.
− The capacity of the pump depends upon the eccentricity, expansion of vanes, and width of
vanes and speed of the rotor. It can be noted that the fluid flow will not occur when the
eccentricity is zero.
− These pumps can handle thin liquids (low viscosity) at relatively higher pressure.
− However, these pumps are not suitable for high speed applications and for the high
viscosity fluids or fluids carrying some abrasive particles.
− The maintenance cost is also higher due to many moving parts. These pumps have various
applications for the pumping of following fluids:
• Aerosol and Propellants
• Aviation Service - Fuel Transfer, Deicing
• Auto Industry - Fuels, Lubes, Refrigeration Coolants
• Bulk Transfer of LPG and NH3
• LPG Cylinder Filling

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.8
• Alcohols
• Refrigeration - Freons, Ammonia
• Solvents
Unbalanced Vane pump
Figure 3.5 - Unbalanced vane pump
− In practice, the vane pumps have more than one vane as shown in figure 3.5. The rotor is
offset within the housing, and the vanes are constrained by a cam ring as they cross inlet and
outlet ports.
− Although the vane tips are held against the housing, still a small amount of leakage exists
between rotor faces and body sides.
− Also, the vanes compensate to a large degree for wear at the vane tips or in the housing
itself. The pressure difference between outlet and inlet ports creates a large amount of load on
the vanes and a significant amount of side load on the rotor shaft which can lead to bearing
failure. This type of pump is called as unbalanced vane pump.
Adjustable vane pump
− The proper design of pump is important and a challenging task. In ideal condition, the
capacity of a pump should be exactly same to load requirements. A pump with larger capacity
wastes energy as the excess fluid will pass through the pressure relief valve.
− It also leads to a rise in fluid temperature due to energy conversion to the heat instead of
useful work and therefore it needs some external cooling arrangement. Therefore, the higher
capacity pump increases the power consumption and makes the system bulky and costly.
− Pumps are generally available with certain standard capacities and the user has to choose
the next available capacity of the pump. Also, the flow rate from the pump in most hydraulic
applications needs to be varying as per the requirements.
− Therefore, some vane pumps are also available with adjustable capacity as shown in figure
3.6. This can be achieved by adjusting a positional relationship between rotor and the inner
casing by the help of an external controlling screw.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.9
Figure
3.6 - Adjustable vane pump
− These pumps basically consist of a rotor, vanes, cam ring, port plate, thrust bearing for
guiding the cam ring and a discharge control screw by which the position of the cam ring
relative to the rotor can be varied. In general, the adjustable vane pumps are unbalanced
pump type.
− The amount of fluid that is displaced by a vane pump running at a constant speed is
determined by the maximum extension of the vanes and the vanes width.
− However, for a pump running in operation, the width of vanes cannot be changed but the
distance by which the vanes are extended can be varied. This is possible by making a
provision for changing the position of the cam ring (adjustable inner casing) relative to the
rotor as shown in figure.
− The eccentricity of rotor with respect to the cam ring is adjusted by the movement of the
screw. The delivery volume increases with increase in the eccentricity. This kind of
arrangement can be used to achieve a variable volume from the pump and is known as
variable displacement vane pump.
Balanced vane pump
− Figure 3.7 shows the schematic of a balanced vane pump.
− This pump has an elliptical cam ring with two inlet and two outlet ports. Pressure loading
still occurs in the vanes but the two identical pump halves create equal but opposite forces on
the rotor. It leads to the zero net force on the shaft and bearings. Thus, lives of pump and
bearing increase significantly. Also the sounds and vibrations decrease in the running mode
of the pump.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.10
Figure 3.7 - Balanced Vane Pump
3.1.3 Piston Pumps
− Piston pumps are meant for the high-pressure applications. These pumps have high-
efficiency and simple design and needs lower maintenance. These pumps convert the rotary
motion of the input shaft to the reciprocating motion of the piston. These pumps work similar
to the four stroke engines.
− They work on the principle that a reciprocating piston draws fluid inside the cylinder when
the piston retracts in a cylinder bore and discharge the fluid when it extends. These pumps are
positive displacement pump and can be used for both liquids and gases. Piston pumps are
basically of two types:
(a) Axial piston pumps
(b) Radial piston pumps
(a) Axial piston pumps
− Axial piston pumps are positive displacement pumps which converts rotary motion of the
input shaft into an axial reciprocating motion of the pistons. These pumps have a number of
pistons (usually an odd number) in a circular array within a housing which is commonly
referred to as a cylinder block, rotor or barrel. These pumps are used in jet aircraft.
− These pumps have sub-types as:
1. Bent axis piston pump
2. Swash plate axial piston pump
1. Bent axis piston pump
− Figure 3.8 shows the schematic of bent axis piston pump. In these pumps, the reciprocating
action of the pistons is obtained by bending the axis of the cylinder block.
− The cylinder block rotates at an angle which is inclined to the drive shaft. The cylinder
block is turned by the drive shaft through a universal link.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.11
− The cylinder block is set at an offset angle with the drive shaft. The cylinder block contains
a number of pistons along its periphery. These piston rods are connected with the drive shaft
flange by ball-and-socket joints.
− The volumetric displacement (discharge) of the pump is controlled by changing the offset
angle. It makes the system simple and inexpensive.
− These pistons are forced in and out of their bores as the distance between the drive shaft
flange and the cylinder block changes. A universal link connects the block to the drive shaft,
to provide alignment and a positive drive.
− The discharge does not occur when the cylinder block is parallel to the drive shaft. The
offset angle can vary from 0° to 40°.
Figure 3.8 - Bent axis piston pump
2. Swash plate axial piston pump
− A swash plate is a device that translates the rotary motion of a shaft into the reciprocating
motion. It consists of a disk attached to a shaft as shown in Figure 3.9. If the disk is aligned
perpendicular to the shaft; the disk will turn along with the rotating shaft without any
reciprocating effect.
− Similarly, the edge of the inclined shaft will appear to oscillate along the shaft's length.
This apparent linear motion increases with increase in the angle between disk and the shaft
(offset angle). The apparent linear motion can be converted into an actual reciprocating
motion by means of a follower that does not turn with the swash plate.
− In swash plate axial piston pump a series of pistons are aligned coaxially with a shaft
through a swash plate to pump a fluid. The schematic of swash plate piston pump is shown in
Figure 3.9. The axial reciprocating motion of pistons is obtained by a swash plate that is
either fixed or has variable degree of angle.
− As the piston barrel assembly rotates, the piston rotates around the shaft with the piston
shoes in contact with the swash plate. The piston shoes follow the angled surface of the
swash plate and the rotational motion of the shaft is converted into the reciprocating motion
of the pistons.
− This reciprocating motion of the piston results in the drawing in and pumping out of the
fluid. Pump capacity can be controlled by varying the swash plate angle with the help of a

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.12
separate hydraulic cylinder. The pump capacity (discharge) increases with increase in the
swash plate angle and vice-versa.
Figure 3.9 - Swash plate axial piston pump
(b) Radial piston pumps
− The typical construction of radial piston pump is shown in Figure 3.10. The piston pump
has pistons aligned radially in a cylindrical block. It consists of a pintle, a cylinder barrel with
pistons and a rotor containing a reaction ring. The pintle directs the fluid in and out of the
cylinder. Pistons are placed in radial bores around the rotor.
− The piston shoes ride on an eccentric ring which causes them to reciprocate as they rotate.
The eccentricity determines the stroke of the pumping piston. Each piston is connected to
inlet port when it starts extending while it is connected to the outlet port when start retracting.
This connection to the inlet and outlet port is performed by the timed porting arrangement in
the pintle.
− As the cylinder barrel rotates, the pistons on one side travel outward. This draws the fluid
in as the cylinder passes the suction port of the pintle. It is continued till the maximum
eccentricity is reached. When the piston passes the maximum eccentricity, pintle is forced
inwards by the reaction ring. This forces the fluid to flow out of the cylinder and enter in the
discharge (outlet) port of the pintle.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.13
Figure 3.10 - Radial piston pump
3.2 LINEAR ACTUATORS
Reliability of hydraulic system not only depends on the system design but also on factors
such as component design and manufacturing and their correct choice. This is also correct
while selecting the cylinder.
A correct cylinder in a hydraulic system contributes to:
1. Optimize system maintainability
2. Ensure minimum down time
3. Ease the process of repairing and trouble shooting
4. Ensure maximum work accuracy
5. Maintain least economic liability and financial losses
3.3 TYPES OF CYLINDER
Functionally cylinders are classified as:
1. Single acting cylinders

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.14
2. Double acting cylinder
3. Telescopic cylinders
4. Tandem cylinders
1. Single-Acting Cylinders
− A single-acting cylinder is simplest in design and is shown schematically in Fig 3.11. It
consists of a piston inside a cylindrical housing called barrel. On one end of the piston there
is a rod, which can reciprocate. At the opposite end, there is a port for the entrance and exit of
oil.
− Single-acting cylinders produce force in one direction by hydraulic pressure acting on the
piston. (Single-acting cylinders can exert a force in the extending direction only.) The return
of the piston is not done hydraulically. In single-acting cylinders, retraction is done either by
gravity or by a spring.
Figure 3.11 - Single-acting cylinders
According to the type of return, single-acting cylinders are classified as follows:
Gravity-return single-acting cylinder
Spring-return single-acting cylinder
Gravity-Return Single-Acting Cylinder
− Figure 3.12 shows gravity-return-type single-acting cylinders. In the push type [Fig. 3.12
(a)], the cylinder extends to lift a weight against the force of gravity by applying oil pressure
at the blank end.
− The oil is passed through the blank-end port or pressure port. The rod-end port or vent port
is open to atmosphere so that air can flow freely in and out of the rod end of the cylinder.
− To retract the cylinder, the pressure is simply removed from the piston by connecting the
pressure port to the tank. This allows the weight of the load to push the fluid out of the
cylinder back to the tank. In pull-type gravity-return-type single-acting cylinder, the cylinder
[Fig.3.12 (b)] lifts the weight by retracting.
− The blank-end port is the pressure port and blind-end port is now the vent port. This
cylinder automatically extends whenever the pressure port is connected to the tank.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.15
Figure 3.12 - Gravity-return single-acting cylinder: (a) Push type; (b) pull type
Spring-Return Single-Acting Cylinder
− A spring-return single-acting cylinder is shown in Fig.3.13.In push type [Fig. 3.13 (a)], the
pressure is sent through the pressure port situated at the blank end of the cylinder.
− When the pressure is released, the spring automatically returns the cylinder to the fully
retracted position. The vent port is open to atmosphere so that air can flow freely in and out
of the rod end of the cylinder.
− Figure 3.13 (b) shows a spring-return single-acting cylinder. In this design, the cylinder
retracts when the pressure port is connected to the pump flow and extends whenever the
pressure port is connected to the tank. Here the pressure port is situated at the rod end of the
cylinder.
Figure 3.13 - (a) Push- and (b) pull-type single-acting cylinders
2. Double-Acting Cylinder
There are two types of double-acting cylinders:
Double-acting cylinder with a piston rod on one side.
Double-acting cylinder with a piston rod on both sides.
Double-Acting Cylinder with a Piston Rod on One Side
− Figure 3.14 shows the operation of a double-acting cylinder with a piston rod on one side.
To extend the cylinder, the pump flow is sent to the blank-end port as in Fig. 3.14 (a). The
fluid from the rod-end port returns to the reservoir.
− To retract the cylinder, the pump flow is sent to the rod-end port and the fluid from the
blank-end port returns to the tank as in Fig. 3.14 (b).

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.16
Figure 3.14 - Double-acting cylinder with a piston rod on one side
Double-Acting Cylinder with a Piston Rod on Both Sides
Figure 3.15 - Double-acting cylinder with a piston rod on one side
− A double-acting cylinder with a piston rod on both sides (Fig. 3.15) is a cylinder with a rod
extending from both ends. This cylinder can be used in an application where work can be
done by both ends of the cylinder, thereby making the cylinder more productive.
− Double-rod cylinders can withstand higher side loads because they have an extra bearing,
one on each rod, to withstand the loading.
3. Telescopic Cylinder
− A telescopic cylinder (shown in Fig. 3.16) is used when a long stroke length and a short
retracted length are required. The telescopic cylinder extends in stages, each stage consisting
of a sleeve that fits inside the previous stage.
− One application for this type of cylinder is raising a dump truck bed. Telescopic cylinders
are available in both single-acting and double-acting models. They are more expensive than
standard cylinders due to their more complex construction.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.17
− They generally consist of a nest of tubes and operate on the displacement principle. The
tubes are supported by bearing rings, the innermost (rear) set of which have grooves or
channels to allow fluid flow.
Figure 3.16 - Telescopic cylinder
− For a given input flow rate, the speed of operation increases in steps as each successive
section reaches the end of its stroke. Similarly, for a specific pressure, the load-lifting
capacity decreases for each successive section.
4. Tandem Cylinder
Figure 3.17 - Tandem cylinder
− A tandem cylinder, shown in Fig. 3.17, is used in applications where a large amount of
force is required from a small-diameter cylinder. Pressure is applied to both pistons, resulting
in increased force because of the larger area.
− The drawback is that these cylinders must be longer than a standard cylinder to achieve an
equal speed because flow must go to both pistons.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.18
5. Diaphragrn Cylinder
− These are used for very small displacements. There will be a diaphragm instead of piston
inside the cylinder. The diaphragm deflects when working fluid is admitted into the cylinder.
− The diaphragm is fitted with a piston rod and hence the piston rod extends or retracts.
− Applications: Food industries, Milk dairies, Air brake etc.
3.4 ROTARY ACTUATORS
− Hydraulic motors are rotary actuators. However, the name rotary actuator is reserved for a
particular type of unit that is limited in rotation to less than 360 degree.
− A hydraulic motor is a device which converts fluid power into rotary power or converts
fluid pressure into torque.
− Torque is a function of pressure or, in other words, the motor input pressure level is
determined by the resisting torque at the output shaft. A hydraulic pump is a device which
converts mechanical force and motion into fluid power.
− A hydraulic motor is not a hydraulic pump when run backward. A design that is completely
acceptable as a motor may operate very poorly as a pump in a certain applications.
Table 3.1 - Differences between a hydraulic motor and a hydraulic pump
Hydraulic Motor Hydraulic Pump
It is a device for delivering torque at a given
pressure. The main emphasis is on
mechanical efficiency and torque that can be
transmitted.
It is a device for delivering flow at a given
pressure. The main emphasis is on
volumetric efficiency and flow.
Motors usually operate over a wide range of
speed, from a low RPM to high RPM.
Pumps usually operate at high RPM.
Most motors are designed for bidirectional
applications such as braking loads, rotary
tables.
In most situations, pumps usually operate in
one direction.
Motors may be idle for long time (as in
index table).
Pumps usually operate continuously.
Motors are subjected to high side loads
(from gears, chains, belt-driven pulleys).
Majority of pumps are not subjected to side
loads. Usually pumps are pad mounted on
power pack top and shaft is connected to the
prime mover directly.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.19
3.3.1 Applications
− Hydraulic motors have become popular in industries. Hydraulic motors can be applied
directly to the work. They provide excellent control for acceleration, operating speed,
deceleration, smooth reversals and positioning.
− They also provide flexibility in design and eliminate much of bulk and weight of
mechanical and electrical power transmission.
− The applications of hydraulic motors in their various combinations with pumping units are
termed hydrostatic transmission.
− A hydrostatic transmission converts mechanical power into fluid power and then reconverts
fluid power into shaft power. The advantages of hydrostatic transmissions include power
transmission to remote areas, infinitely variable speed control, self-overload protection,
reverse rotation capability, dynamic braking and a high power-to-weight ratio. Applications
include material-handling equipment, farm tractors, railway locomotives, buses, lawn
mowers and machine tools.
− New fields of applications are being discovered constantly for hydrostatic transmissions.
Farm implements, road machinery, material-handling equipment, Numerical Control(NC)
machines high-performance aircrafts, military uses and special machinery are only a few of
new fields expanding through the use of fluid power transmission. Many automobiles,
railway locomotives and buses use a hydrostatic transmission.
Table 3.2 - Comparison between a hydraulic motor and an electric motor
Electric Motor Hydraulic Motor
Electric motors cannot be stopped instantly.
Their direction of rotation cannot be
reversed instantly. This is because of air gap
between the rotor and stator and the weak
magnetic field.
Hydraulic motors can be stalled for any
length of time. Their direction of rotation
can be instantly reversed and their rotational
speed can be infinitely varied without
affecting their torque. They can be braked
instantly and have immense torque
capacities.
Electric motors are heavy and bulky.
Hydraulic motors are very compact
compared to electric motors. For the same
power, they occupy about 25% of the space
required by electric motors and weigh about
10% of electric motors.
Moment of inertia-to-torque ratio is nearly
100.
Moment of inertia-to-torque ratio is nearly
1.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.20
3.5 CLASSIFICATION OF HYDRAULIC MOTORS
− There are two types of hydraulic motors: (a) High-speed low-torque motors and (b) low–
speed high-torque motors. In high-speed low-torque motors, the shaft is driven directly from
either the barrel or the cam plate, whereas in low-speed high-torque motors, the shaft is
driven through a differential gear arrangement that reduces the speed and increases the
torque.
− Depending upon the mechanism employed to provide shaft rotation, hydraulic motors can
be classified as follows:
1. Gear motors.
2. Vane motors.
3. Piston motors:
Axial piston-type motors.
Radial piston-type motors.
− Gear motors are the least efficient, most dirt-tolerant and have the lowest pressure rating of
3. Piston motors are the most efficient, least dirt-tolerant and have high pressure ratings.
Vane and piston motors can be fixed or variable displacement, but gear motors are available
with only fixed displacement.
1. Gear Motors:
− A gear motor develops torque due to hydraulic pressure acting against the area of one tooth.
There are two teeth trying to move the rotor in the proper direction, while one net tooth at the
center mesh tries to move it in the opposite direction.
− In the design of a gear motor, one of the gears is keyed to an output shaft, while the other is
simply an idler gear. Pressurized oil is sent to the inlet port of the motor. Pressure is then
applied to the gear teeth, causing the gears and output shaft to rotate.
− The pressure builds until enough torque is generated to rotate the output shaft against the
load. The side load on the motor bearing is quite high, because all the hydraulic pressure is on
one side. This limits the bearing life of the motor. Schematic diagram of gear motor is shown
in Fig.
− Gear motors are normally limited to 150 bar operating pressures and 2500 RPM operating
speed. They are available with a maximum flow capacity of 600 LPM.
− The gear motors are simple in construction and have good dirt tolerance, but their
efficiencies are lower than those of vane or piston pumps and they leak more than the piston
units. Generally, they are not used as servo motors.
− Hydraulic motors can also be of internal gear design. These types can operate at higher
pressures and speeds and also have greater displacements than external gear motors.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.21
Figure 3.18 - Gear motor
2. Vane Motors
− Figure 3.19 shows an unbalanced vane motor consisting of a circular chamber in which
there is an eccentric rotor carrying several spring or pressure-loaded vanes. Because the fluid
flowing through the inlet port finds more area of vanes exposed in the upper half of the
motor, it exerts more force on the upper vanes, and the rotor turns counter clockwise. Close
tolerances are maintained between the vanes and ring to provide high efficiencies.
− The displacement of a vane hydraulic motor is a function of eccentricity. The radial load on
the shaft bearing of an unbalanced vane motor is also large because all its inlet pressure is on
one side of the rotor.
Figure 3.19 - Vane motor

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.22
3. Piston Motors
Piston motors are classified into the following types:
1. According to the piston of the cylinder block and the drive shaft, piston motors are
classified as follows:
Axial piston motors.
Radial piston motors.
2. According to the basis of displacement, piston motors are classified as follows:
Fixed-displacement piston motors.
Variable-displacement piston motors
Axial Piston Motors
− In axial piston motors, the piston reciprocates parallel to the axis of the cylinder block.
These motors are available with both fixed-and variable-displacement feature types. They
generate torque by pressure acting on the ends of pistons reciprocating inside a cylinder
block.
− Figure 3.20 illustrates the inline design in which the motor, drive shaft and cylinder block
are centered on the same axis. Pressure acting on the ends of the piston generates a force
against an angled swash plate. This causes the cylinder block to rotate with a torque that is
proportional to the area of the pistons.
− The torque is also a function of the swash-plate angle. The inline piston motor is designed
either as a fixed- or a variable-displacement unit.
− In variable-displacement units, the swash plate is mounted on the swinging yoke. The angle
can be varied by various means such as a lever, hand wheel or servo control. If the offset
angel is increased, the displacement and torque capacity increase but the speed of the drive
shaft decreases. Conversely, reducing the angle reduces the torque capability but increases
the drive shaft speed.
Figure 3.20 - Straight axis piston pump
Bent-Axis Piston Motors
− A bent-axis piston motor is shown in Fig 3.21. This type of motor develops torque due to
pressure acting on the reciprocating piston. In this motor, the cylinder block and drive shaft
mount at an angel to each other so that the force is exerted on the drive shaft flange.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.23
− Speed and torque depend on the angle between the cylinder block and the drive shaft. The
larger the angle, the greater the displacement and torque, and the smaller the speed. This
angle varies from 7.5° (minimum) to 30° (maximum). This type of motor is available in two
types, namely fixed-displacement type and variable-displacement type.
Figure 3.21 - Bent axis piston motor
3.6 HYDROSTATIC TRANSMISSION SYSTEM
In this type of drives a hydrostatic pump and a motor is used.
− The engine drives the pump and it generates hydrostatic pressure on the fluid.
− The pressurized fluid then fed to the motor and the motor drives the wheel.
− In these transmissions mechanical power is generated in the motor as a result of
displacement under hydraulic pressure.
− The fluid, of course, also carries kinetic energy, but since it leaves the motor at the same
velocity as that at which it enters, there is no change in its kinetic- energy content, and kinetic
energy plays no part in the transmission of power.
− It consists of a pump, which converts torque and rotation of mechanical shaft into flow of
pressurized fluid combined with a hydraulic motor, which converts fluid flow under pressure
into rotating torque on the output shaft.
− The pump and motor are identical in construction but they may vary in size and
displacement, particularly when torque multiplication is needed.
− By employing variable delivery of hydraulic units, it is possible to obtain a wide range of
output ratios.
Various types of hydrostatic systems
1. Constant displacement pump and constant displacement motor
2. Variable displacement pump and constant displacement motor

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.24
Figure 3.22 – Hydrostatic transmission system
3. Constant displacement pump and variable displacement motor
4. Variable displacement pump and variable displacement motor
Advantages of hydrostatic drive
− Hydrostatic drive eliminates the need for mechanical transmission components like clutch
and gearbox as well as allied controls.
− It provides for smooth and precise control of vehicle speed and travel.
− This system ensures faster acceleration and deceleration of vehicle
− It offers better flexibility in vehicle installation because of wide range in choice of pumps
and motors of different capacities and of fixed or variable displacement type. Besides
hydraulic fluid pipes lines replace mechanical transmission drive line components
− The ease with which the reverse drive can be obtained makes the hydrostatic drive more
attractive. This drive is fully reversible from maximum speed in one direction to zero speed
and to maximum speed in the reverse direction.
Limitations of hydrostatic drive
− Noisy in operation
− Heavier in weight and larger in bulk
− Costlier when compared to other types of transmission
− Manufacturing of pump and motor requires high precision machining of components and
skilled workmanship
− In view of high pressure employed in system, the working components are heavier.
− It also possesses problem of oil leakage through oil seals.
Applications of hydrostatic drive
− It is used to move the machine tools accurately.
− Used in steering gears of ship.
− Used in war ships to operate gun turrets.

Oil Hydraulics and Pneumatics (2171912) 3. Hydraulic Pumps, Motors and Actuators
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 3.25
− Used in road rollers, tractors, earth movers, heavy duty trucks.
Comparison of hydrostatic drive with hydrodynamic drives
− Torque ratio is lesser in hydrostatic drives for different speed ratios.
− Hydrostatic offers high efficiency over a wide range of speeds when compared to
hydrodynamic drives.
− Vehicle with hydrostatic drive has no tendency to creep unlike hydrodynamic drive during
idling.
− Dynamic braking of vehicle is an inherent feature of hydrostatic drive. This feature helps to
eliminate conventional shoe or disc type of brakes. Creep is caused to drag torque, movement
of vehicle during idling


Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.1
4 HYDRAULIC VALVES AND ACCESSORIES
Course Contents
4.1 Control valves
4.2 Direction control valve
4.3 Pressure control valve
4.4 Flow control valves
4.5 Accumulators
4.6 Reservoirs
4.7 Hoses
4.8 Heat exchangers (heating and cooling devices)

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.2
4.1 CONTROL VALVES
In a hydraulic system, the hydraulic energy available from a pump is converted into motion
and force by means of an actuator. The control of these mechanical outputs (motion and
force) is one of the most important functions in a hydraulic system. The proper selection of
control selection ensures the desired output and safe function of the system. In order to
control the hydraulic outputs, different types of control valves are required. It is important to
know various types of control valves and their functions. This not only helps to design a
proper hydraulic system but also helps to discover the innovative ways to improve the
existing systems.
There are basically three types of valves employed in hydraulic systems:
1. Directional control valves
2. Flow control valves
3. Pressure control valves
− These control valves contain ports that are external openings for the fluid to enter and
leave. The number of ports is usually identified by the term ‘way’. For example, a valve with
four ports is named as four-way valve.
− The fluid flow rate is responsible for the speed of actuator (motion of the output) and
should controlled in a hydraulic system. This operation can be performed by using flow
control valves. The pressure may increase gradually when the system is under operation. The
pressure control valves protect the system by maintaining the system pressure within the
desired range. Also, the output force is directly proportional to the pressure and hence, the
pressure control valves ensure the desired force output at the actuator.
4.2 DIRECTION CONTROL VALVE
− Directional control valves are used to control the distribution of energy in a fluid power
system. They provide the direction to the fluid and allow the flow in a particular direction.
− These valves are used to control the start, stop and change in direction of the fluid flow.
These valves regulate the flow direction in the hydraulic circuit.
− Directional control valves can be classified in the following manner:
1. Type of construction:
• Poppet valves
• Spool valves
2. Number of ports:
• Two- way valves
• Three – way valves
• Four- way valves.
3. Number of switching position:
• Two – position

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.3
• Three - position
4. Actuating mechanism:
• Manual actuation
• Mechanical actuation
• Solenoid actuation
• Hydraulic actuation
• Pneumatic actuation
• Indirect actuation
1. Type of construction
Check Valves
Figure 4.1 - Check valve
− These are unidirectional valves and permit the free flow in one direction only. These valves
have two ports: one for the entry of fluid and the other for the discharge.
− They are consists of a housing bore in which ball or poppet is held by a small spring force.
The valve having ball as a closing member is known as ball check valve.
− The various types of check valves are available for a range of applications. These valves
are generally small sized, simple in construction and inexpensive.
− Generally, the check valves are automatically operated. Human intervention or any external
control system is not required.
− These valves can wear out or can generate the cracks after prolonged usage and therefore
they are mostly made of plastics for easy repair and replacements. The check valve is
designed for a specific cracking pressure which is the minimum upstream pressure at which
the valve operates.
− The ball is held against the valve seat by a spring force. It can be observed from the figure
that the fluid flow is not possible from the spring side but the fluid from opposite side can
pass by lifting the ball against.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.4
− However, there is some pressure drop across the valve due to restriction by the spring force.
Therefore these valves are not suitable for the application of high flow rate. When the
operating pressure increases the valve becomes more tightly seated in this design.
− When the closing member is not a ball but a poppet energized by a spring is known as
poppet valve. The advantages of the poppet valves include no leakage, long life and
suitability with high pressure applications. These valves are commonly used in liquid or gel
mini-pump dispenser spigots, spray devices, some rubber bulbs for pumping air, manual air
pumps, and refillable dispensing syringes. The pressure drop is comparatively less in right
angle check valve.
− Some valves are meant for an application where free flow is required in one direction and
restricted flow required in another direction. These types of valves are called as restriction
check valve. These valves are used when a direction sensitive flow rate is required. For
example, the different actuator speeds are required in both the directions. The flow
adjustment screw can be used to set the discharge (flow rate) in the restricted direction.
Figure 4.2 - Restriction check valve
− Another important type of check valve known as pilot operated check valve which is
shown in figure 4.3. The function of the pilot operated check valve is similar to a normal
check valve unless it gets an extra pressure signal through a pilot line.
− Pilot allows free flow in one direction and prevents the flow in another direction until the
pilot pressure is applied. But when pilot pressure acts, the poppet opens and the flow is
blocked from both the sides. These valves are used to stop the fluid suddenly.
Spool valve
− The spool valves derive their name from their appearance. It consists of a shaft sliding in a
bore which has large groove around the circumference.
− This type of construction makes it look like a spool. The spool is sealed along the clearance
between moving spool and housing (valve body).
− The quality of seal or the amount of leakage depends on the amount of clearance, viscosity
of fluid and the level of the pressure.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.5
Figure 4.3 - Pilot operated check valve
− The grooves guide the fluid flow by interconnecting or blocking the holes (ports). The
spool valves are categorized according to the number of operating positions and the way
hydraulic lines interconnections.
− One of the simplest two way spool valve is shown in Figure 4.4. The standard terms are
referred as Port ‘P’ is pressure port, Port ‘T’ is tank port and Port ‘A’ and Port ‘B’ are the
actuator (or working) ports. The actuators can move in forward or backward direction
depending on the connectivity of the pressure and tank port with the actuators port.
Figure 4.4 - Valve closed
Figure 4.5 - Valve opened by actuation
2. Number of ports
Two way valves
− Two way valves have only two ports as shown in Figure 4.4 and Figure 4.5. These valves
are also known as on-off valves because they allow the fluid flow only in direction.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.6
− Normally, the valve is closed. These valves are available as normally open and normally
closed function. These are the simplest type of spool valves.
− When actuating force is not applied to the right, the port P is not connected with port A as
shown in figure. Therefore, the actuation does not take place.
− Similarly, Figure 4.5 shows the two-way spool valve in the open condition. Here, the
pressure port P is connected with the actuator port A.
Three way valves
− When a valve has one pressure port, one tank port and one actuating port as shown in
Figures 4.6, it is known as three way valve.
− In this valve, the pressure port pressurizes one port and exhausts another one. As shown in
figures 4.6, only one actuator port is opened at a time.
− In some cases a neutral position is also available when both the ports are blocked.
Generally, these valves are used to operate single acting cylinders.
Figure 4.6 - Three way valve: P to A connected and T is blocked
Figure 4.7 - Three way valve in closed position
Four way valves
− It is generally used to operate the cylinders and fluid motors in both the directions. The four
ways are: pump port P, tank port T, and two working ports A and B connected to the actuator.
− The primary function of a four way valve is to pressurize and exhaust two working ports A
and B alternatively.
− Figures 4.9 and show three position four way valves. These types of valves have three
switching positions. They have a variety of possible flow path configurations but have
identical flow path configuration.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.7
Figure 4.8 - Three position four way valve in open center mode
− When the centered path is actuated, port A and B are connected with both the ports P and T
respectively. In this case, valve is not active because all the ports are open to each other. The
fluid flows to the tank at atmospheric pressure. In this position work cannot be done by any
part of the system. This configuration helps to prevent heat build-up.
Figure 4.9 - Three position four way valve: P to B and A to T
− When left end (port B) is actuated, the port P is connected with ports B and T is connected
with port A as shown in Figure 4.9. Similarly, when the right end is actuated the port P is
connected to A and working port B is connected to port T as shown in Figure 4.10. The three
position valves are used when the actuator is needed to stop or hold at some intermediate
position.
Figure 4.10 - Three position four way valve: P to A and B to T
Figure 4.11 - Three position four way valve: closed center

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.8
− Figure 4.11 shows a three position four way valve in the closed center position. The
working of the valve is similar to open center DCV. In closed center DCV all user ports (port
A and port B) are closed. Therefore, these ports are hydraulically locked and the actuator
cannot be moved by the external load.
− The pumped fluid flows through the relief valve. The pump works under the high pressure
condition which not only wastes the pump power but also causes wear of the pump parts. The
fluid temperature also rises due to heat generation by the pump energy transformation. The
increase in fluid temperature may lead to the oxidation and viscosity drop of the fluid. The
oxidation and viscosity drop reduces the pump life and leakage in the system.
Figure 4.12 - Tandem centered valve
− Figure 4.12 shows a tandem center three position four way direction control valve. In this
configuration, the working ports A and B are blocked and the pump port P is connected to the
tank port T. Tandem center results in the locked actuator.
− However, pump to tank flow takes place at the atmospheric temperature. This kind of
configuration can be used when the load is needed to hold. Disadvantages of high pressure
pumping in case of closed center can be removed by using this configuration.
− The regenerative center is another important type of common center configuration used in
hydraulic circuits. Regenerative means the flow is generated from the system itself.
− Regenerative center is used when the actuator movement in one direction requires two
different speeds. For example, the half-length of the stroke requires fast movement during no-
load condition and remaining half-length requires slow motion during load conditions. The
regenerative center saves the pump power.
Figure 4.13 - Regenerative Center

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.9
− Figure 4.13 shows the regenerative configuration for the three position four way (3/4) DCV
in its mid position. This configuration increases the piston speed. In the mid position pump
Port P is connected to A and B, and tank port T is blocked.
− Figure 4.14 shows the floating center 3/4 DCV in its mid position. In this configuration, the
pump port is blocked and both the working ports A and B are connected to the tank port T.
Therefore, the working ports A and B can be moved freely which is reason they are called as
floating center. The pumped fluid passes through the relief valve. Therefore, pump works in
the high pressure condition. This configuration is used only in some special cases.
Figure 4.14 - Floating Center
Two position four way (2/4) valves
− The two position four way valves have only two switching positions and do not have any
mid position. Therefore, they are also known as impulse valves. The typical connections of
2/4 valves is shown in Figures 4.15 and 4.16. These valves can be used to operate double
acting cylinders. These are also used to reciprocate or hold an actuator.
− The operation is faster because the distance between ports of these valves is smaller.
Hence, these valves are used on machines where fast reciprocation cycles are needed such as
punching and stamping etc.
Figure 4.15 - Two position four way DCV: P to B and A to T
Figure 4.16 - Two position four way DCV: P to A and B to T

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.10
4. Classification based on actuation mechanism
Manual actuation
In this type, the spool is operated manually. Manual actuators are hand lever, push button and
pedals etc.
Mechanical actuation
− The DCV spool can be operated by using mechanical elements such as roller and cam,
roller and plunger and rack and pinion etc. In these arrangements, the spool end is of roller or
a pinion gear type. The plunger or cam or rack gear is attached to the actuator. Thus, the
mechanical elements gain some motion relative to the actuator (cylinder piston) which can be
used for the actuation.
Solenoid actuation
− The solenoid actuation is also known as electrical actuation. The schematic of solenoid
actuation is shown in Figure 4.17. The energized solenoid coil creates a magnetic force which
pulls the armature into the coil. This movement of armature controls the spool position. The
main advantage of solenoid actuation is its less switching time.
Figure 4.17 - Working of solenoid to shift spool of valve
Hydraulic actuation
− This type actuation is usually known as pilot-actuated valve and a schematic is shown in
Figure 4.18. In this type of actuation, the hydraulic pressure is directly applied on the spool.
The pilot port is located on one end of the valve. Fluid entering from pilot port operates
against the piston and forces the spool to move forward. The needle valve is used to control
the speed of the actuation.
Figure 4.18 - Pilot actuated DCV

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.11
Pneumatic actuation
− DCV can also be operated by applying compressed air against a piston at either end of the
valve spool. The construction of the system is similar to the hydraulic actuation as shown in
Figure 4.18. The only difference would be the actuation medium. The actuation medium is
the compressed air in pneumatic actuation system.
Indirect actuation of directional control valve
− The direction control valve can be operated by manual, mechanical, solenoidal (electrical),
hydraulic (pilot) and pneumatic actuations. The mode of actuation does not have any
influence on the basic operation of the hydraulic circuits.
− Mostly, the direct actuation is restricted to use with smaller valves only because usually lot
of force is not available. The availability of limited force is the greatest disadvantage of the
direct actuation systems. In practice, the force required to shift the spool is quiet higher.
Therefore, the larger valves are often indirectly actuated in sequence.
− First, the smaller valve is actuated directly and the flow from the smaller valve is directed
to either side of the larger valve.
− The control fluid can be supplied by the same circuit or by a separate circuit. The pilot
valve pressure is usually supplied internally.
− These two valves are often incorporated as a single unit. These valves are also called as
Electro-hydraulic operated DCV.
4.3 PRESSURE CONTROL VALVE
The pressure control valves are used to protect the hydraulic components from excessive
pressure. This is one of the most important components of a hydraulic system and is
essentially required for safe operation of the system. Its primary function is to limit the
system pressure within a specified range. It reduces the system pressure and as the pressure
reduces to the set limit again the valve closes. Various types of pressure control valves are
discussed in the following sections:
1. Direct type of relief valve
− Schematic of direct pressure relief valve is shown in figure 4.19. This type of valves has
two ports; one of which is connected to the pump and another is connected to the tank. It
consists of a spring chamber where poppet is placed with a spring force.
− Generally, the spring is adjustable to set the maximum pressure limit of the system. The
poppet is held in position by combined effect of spring force and dead weight of spool.
− As the pressure exceeds this combined force, the poppet raises and excess fluid bypassed to
the reservoir (tank). The poppet again reseats as the pressure drops below the pre-set value. A
drain is also provided in the control chamber. It sends the fluid collected due to small leakage
to the tank and thereby prevents the failure of the valve.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.12
Figure 4.19 - Pressure Relief Valve
2. Unloading Valve
− The construction of unloading valve is shown in Figure 4.20. This valve consists of a
control chamber with an adjustable spring which pushes the spool down.
− The valve has two ports: one is connected to the tank and another is connected to the pump.
The valve is operated by movement of the spool. Normally, the valve is closed and the tank
port is also closed.
Figure 4.20 - Unloading Valve
− These valves are used to permit a pump to operate at the minimum load. It works on the
same principle as direct control valve that the pump delivery is diverted to the tank when
sufficient pilot pressure is applied to move the spool.
The pilot pressure maintains a static pressure to hold the valve opened. The pilot pressure
holds the valve until the pump delivery is needed in the system.
− As the pressure is needed in the hydraulic circuit; the pilot pressure is relaxed and the spool
moves down due to the self-weight and the spring force. Now, the flow is diverted to the
hydraulic circuit.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.13
− The drain is provided to remove the leaked oil collected in the control chamber to prevent
the valve failure. The unloading valve reduces the heat build-up due to fluid discharge at a
pre-set pressure value.
3. Sequence valve
− The primary function of this type of valve is to divert flow in a predetermined sequence. It
is used to operate the cycle of a machine automatically. A sequence valve may be of direct-
pilot or remote-pilot operated type.
Schematic of the sequence valve is shown in Figure 4.21. Its construction is similar to the
direct relief valve.
− It consists of the two ports; one main port connecting the main pressure line and another
port (secondary port) is connected to the secondary circuit. The secondary port is usually
closed by the spool.
− The pressure on the spool works against the spring force. When the pressure exceeds the
pre-set value of the spring; the spool lifts and the fluid flows from the primary port to the
secondary port.
Figure 4.21 - Sequence valve
− For remote operation; the passage used for the direct operation is closed and a separate
pressure source for the spool operation is provided in the remote operation mode.
4. Counterbalance Valve
− The schematic of counterbalance valve is shown in Figure 4.22. It is used to maintain the
back pressure and to prevent a load from failing. The counterbalance valves can be used as
breaking valves for decelerating heavy loads.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.14
− These valves are used in vertical presses, lift trucks, loaders and other machine tools where
position or hold suspended loads are important.
− Counterbalance valves work on the principle that the fluid is trapped under pressure until
pilot pressure overcomes the pre-set value of spring force. Fluid is then allowed to escape,
letting the load to descend under control. This valve is normally closed until it is acted upon
by a remote pilot pressure source. Therefore, a lower spring force is sufficient. It leads to the
valve operation at the lower pilot pressure and hence the power consumption reduces, pump
life increases and the fluid temperature decreases.
Figure 4.22 - Counter Balance Valve
5. Pressure Reducing Valve
− Sometimes a part of the system may need a lower pressure. This can be made possible by
using pressure reducing valve as shown in Figure 4.23. These valves are used to limit the
outlet pressure.
− Generally, they are used for the operation of branch circuits where the pressure may vary
from the main hydraulic pressure lines.
− These are open type valve and have a spring chamber with an adjustable spring, a movable
spool as shown in figure. A drain is provided to return the leaked fluid in the spring (control)
chamber.
− A free flow passage is provided from inlet port to the outlet port until a signal from the
outlet port tends to throttle the passage through the valve. The pilot pressure opposes the
spring force and when both are balanced, the downstream is controlled at the pressure setting.
− When the pressure in the reduced pressure line exceeds the valve setting, the spool moves
to reduce the flow passage area by compressing the spring. It can be seen from the figure that
if the spring force is more, the valve opens wider and if the controlled pressure has greater
force, the valves moves towards the spring and throttles the flow.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.15
Figure 4.23 - Pressure Reducing Valve
Table 4.1 – Difference between pressure relief valve and pressure reducing valve
Sr.
No;
Pressure Relief valve Pressure Reducing Valve
1 This is NC (Normally Closed) type
valve This is NO (Normally Open) tvpe valve
2 Fitted in by-pass line to reservoir tank Fitted in main line to system
3 Outlet is connected to reservoir tank. Outlet is connected to system
4 Inlet pressure is system pressure. Outlet pressure is system pressure
5 Inlet pressure is the pilot pressure, Outlet pressure is pilot pressure.
6
It opens when inlet pressure (system
pressure or pilot pressure) becornes
more than pre-set
value
It closes when outlet pressure (System
pressure or pilot pressure) becomes
more then pre-set value
Table 4.2 – Difference between pressure relief valve and Unloading valve
Sr.
No, Pressure relief valve Unloading valve
1 Its inlet itself is its pilot connection. It has a separate Pilot connection.
2 It is set for maximum pressure
required for operation of the system.
It is set for the minimum pressure
required during idle period of the
system.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.16
3 It opens when its inlet pressure
(maximum system pressure) increases
above pre-set value
It opens when the pilot pressure
(minimum
idle-period pressure) increases above
pre-set value.
4 It is a safety valve which avoids
damage to the system components due
to high pressure.
It avoids over heating of working fluid,
and it saves power to a greater extent.
4.4 FLOW CONTROL VALVES
− In practice, the speed of actuator is very important in terms of the desired output and needs
to be controlled. The speed of actuator can be controlled by regulating the fluid flow.
− A flow control valve can regulate the flow or pressure of the fluid. The fluid flow is
controlled by varying area of the valve opening through which fluid passes.
− The fluid flow can be decreased by reducing the area of the valve opening and it can be
increased by increasing the area of the valve opening.
− A very common example to the fluid flow control valve is the household tap. Figure 4.24
shows the schematic diagram of a flow control valve. The pressure adjustment screw varies
the fluid flow area in the pipe to control the discharge rate.
Figure 4.24 - Flow Control Valve
− The pressure drop across the valve may keep on fluctuating. In general, the hydraulic
systems have a pressure compensating pump.
− The inlet pressure remains almost constant but the outlet pressure keeps on fluctuating
depending on the external load. It creates fluctuating pressure drop. Thus, the ordinary flow
control valve will not be able to maintain a constant fluid flow.
− A pressure compensated flow control valve maintains the constant flow throughout the
movement of a spool, which shifts its position depending on the pressure.
− Flow control valves can also be affected by temperature changes. It is because the viscosity
of the fluid changes with temperature. Therefore, the advanced flow control valves often have
the temperature compensation. The temperature compensation is achieved by the thermal
expansion of a rod, which compensates for the increased coefficient of discharge due to
decreasing viscosity with temperature.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.17
Types of Flow Control Valves
The flow control valves work on applying a variable restriction in the flow path. Based on the
construction; there are mainly four types viz. plug valve, butterfly valve, ball valve and
balanced valve.
1. Plug or glove valve
− The plug valve is quite commonly used valve. It is also termed as glove valve. Schematic
of plug or glove valve is shown in Figure 4.25.
− This valve has a plug which can be adjusted in vertical direction by setting flow adjustment
screw. The adjustment of plug alters the orifice size between plug and valve seat. Thus the
adjustment of plug controls the fluid flow in the pipeline.
− The characteristics of these valves can be accurately predetermined by machining the taper
of the plug. The typical example of plug valve is stopcock that is used in laboratory
glassware.
− The valve body is made of glass or teflon. The plug can be made of plastic or glass. Special
glass stopcocks are made for vacuum applications. Stopcock grease is used in high vacuum
applications to make the stopcock air-tight.
Figure 4.25 - Plug or glove valve
2. Butterfly valve
− A butterfly valve is shown in Figure 4.26. It consists of a disc which can rotate inside the
pipe. The angle of disc determines the restriction.
− Butterfly valve can be made to any size and is widely used to control the flow of gas. These
valves have many types which have for different pressure ranges and applications.
− The resilient butterfly valve uses the flexibility of rubber and has the lowest pressure rating.
The high performance butterfly valves have a slight offset in the way the disc is positioned. It
increases its sealing ability and decreases the wear.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.18
− For high-pressure systems, the triple offset butterfly valve is suitable which makes use of a
metal seat and is therefore able to withstand high pressure. It has higher risk of leakage on the
shut-off position and suffer from the dynamic torque effect.
− Butterfly valves are favoured because of their lower cost and lighter weight. The disc is
always present in the flow therefore a pressure drop is induced regardless of the valve
position.
Figure 4.26 Butterfly valve
3. Balanced valve
− Schematic of a balanced valve is shown in figure 4.27. It comprises of two plugs and two
seats. The opposite flow gives little dynamic reaction onto the actuator shaft. It results in the
negligible dynamic torque effect.
− However, the leakage is more in these kind of valves because the manufacturing tolerance
can cause one plug to seat before the other.
− The pressure-balanced valves are used in the houses. They provide water at nearly constant
temperature to a shower or bathtub despite of pressure fluctuations in either the hot or cold
supply lines.
Figure 4.27 - Balanced valve
4.5 ACCUMULATORS
A hydraulic accumulator is a device that stores the potential energy of an incompressible
fluid held under pressure by an external source against some dynamic force. This dynamic
force can come from different sources. The stored potential energy in the accumulator is a
quick secondary source of fluid power capable of doing useful work.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.19
4.5.1 Types of accumulators
1. Weight-loaded or gravity accumulator:
− Schematic diagram of weight loaded accumulator is shown in Fig. 4.28. It is a vertically
mounted cylinder with a large weight.
− When the hydraulic fluid is pumped into it, the weight is raised. The weight applies a force
on the piston that generates a pressure on the fluid side of piston.
− The advantage of this type of accumulator over other types is that it applies a constant
pressure on the fluid throughout its range of motion.
− The main disadvantage is its extremely large size and heavy weight. This makes it
unsuitable for mobile application.
2. Spring-loaded accumulator:
− A spring-loaded accumulator stores energy in the form of a compressed spring. A hydraulic
fluid is pumped into the accumulator, causing the piston to move up and compress the spring
as shown in Fig. 4.29. The compressed spring then applies a force on the piston that exerts a
pressure on the hydraulic fluid.
− This type of accumulator delivers only a small volume of oil at relatively low pressure.
Furthermore, the pressure exerted on the oil is not constant as in the dead-weight-type
accumulator. As the springs are compressed, the accumulator pressure reaches its peak, and
as the springs approach their free lengths, the accumulator pressure drops to a minimum.
Figure 4.28 - Dead weight accumulator

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.20
Figure 4.29 - Spring-loaded accumulator
3. Gas-loaded accumulator:
− A gas-loaded accumulator is popularly used in industries. Here the force is applied to the
oil using compressed air. Schematic diagram of a gas loaded accumulator is shown in Fig.
4.30. A gas accumulator can be very large and is often used with water or high water-based
fluids using air as a gas charge.
− Typical application is on water turbines to absorb pressure surges owing to valve closure
and on ram pumps to smooth out the delivery flow. The exact shape of the accumulator
characteristic curve depends on pressure–volume relations:
Isothermal (constant temperature): This occurs when the expansion or compression
of the gas is very slow. The relationship between absolute pressure p and volume V of
the gas is constant:
pV = constant
Isentropic (adiabatic processes): This is where there is no flow of energy into or out
of the fluid. The law that the gas obeys is given by pVγ = constant, where γ is ratio of
specific heat and is approximately equal to 1.4.
Polytropic: This is somewhere between isothermal and isentropic. This gas change is
governed by the law pVn = constant, where n is somewhere between 1 and 1.4 and is
known as the polytropic coefficient.
Figure 4.30 - Gas-loaded accumulator.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.21
4.6 RESERVOIRS
The functions of a fluid reservoir in a power hydraulic system are as follows:
1. To provide a chamber in which any change in the volume of fluid in a hydraulic circuit can
be accommodated. When the cylinder extends, there is an increased volume of fluid in the
circuit and consequently there is a decrease in the reservoir level.
2. To provide a filling point for the system.
3. To serve as a storage space for the hydraulic fluid used in the system.
4. It is used as the location where the fluid is conditioned.
5. To provide a volume of fluid which is relatively stationery to allow entrained air to
separate out and heavy contaminants to settle. The reservoir is where sludge, water and metal
slips settle.
6. It is a place where the entrained air picked up by the oil is allowed to escape.
7. To accomplish the dissipation of heat by its proper design and to provide a radiating and
convective surface to allow the fluid to cool.
A reservoir is constructed with steel plates. The inside surface is painted with a sealer to
prevent rust due to condensed moisture.
At the bottom, it contains a drain plug to allow the complete drainage of the tank when
required. A removable head can be provided for easy access during cleaning. A vented
breather cap is also included that contains an air filtering screen. This allows the tank to
breathe as the oil level changes due to system demand requirements.
A baffle plate extends lengthwise across the center of the tank. The purpose of the baffle
plate is to separate the pump inlet line from the return line to prevent the same fluid from
recirculating continuously within the tank. The functions of a baffle plate are as follows:
1. To permit foreign substances to settle to bottom.
2. To allow entrained air to escape from oil.
3. To prevent localized turbulence in the reservoir.
4. To promote heat dissipation through reservoir walls. The return line should enter the
reservoir on the side of the baffle plate that is opposite to the pump suction line.
4.6.1 Features of a Hydraulic Reservoir:
Schematic diagram of hydraulic reservoir is shown in Fig.4.31. There are many components
mounted on reservoir and each one of them having specific features. Following are the
features of a hydraulic reservoir:
1. Filler cap (breather cap): It should be airtight when closed but may contain the air vent
that filters air entering the reservoir to provide a gravity push for proper oil flow.
2. Oil level gauge: It shows the level of oil in the reservoir without having to open the
reservoir.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.22
Figure 4.31 - Hydraulic reservoir
3. Baffle plate: It is located lengthwise through the center of the tank and is two-third the
height of the oil level. It is used to separate the outlet to the pump from the return line. This
ensures a circuitous flow instead of the same fluid being recirculated. The baffle prevents
local turbulence in the tank and allows foreign material to settle, get rid of entrapped air and
increase heat dissipation.
4. Suction and return lines: They are designed to enter the reservoir at points where air
turbulence is the least. They can enter the reservoir at the top or at the sides, but their ends
should be near the bottom of the tank. If the return line is above the oil level, the returning oil
can foam and draw in air.
5. Intake filter: It is usually a screen that is attached to the suction pipe to filter the hydraulic
oil.
6. Drain plug: It allows all oil to be drained from the reservoir. Some drain plugs are
magnetic to help remove metal chips from the oil.
7. Strainers and filters: Strainers and filters are designed to remove foreign particles from
the hydraulic fluid.
4.6.2 Types of Reservoirs
Industrial reservoirs come in a variety of styles. Some of them are the following:
1. Non-pressurized: The reservoir may be vented to atmosphere using an air filter or a
separating diaphragm. The type most commonly used in industry, normally, has an air
breather filter, although in very dirty environments, diaphragms or air bags are used.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.23
2. Pressurized: A pressurized reservoir usually operates between 0.35 and 1.4 bar and has to
be provided with some method of pressure control; this may be a small air compressor
maintaining a set charge pressure.
− In motor circuits where there is a little change in fluid volume in the reservoir, a simple
relief valve may be used to limit the air pressure that alters with changes in temperature.
− The advantages of a pressurized reservoir are that it provides boost pressure to the main
pump and prevents the ingress of atmospheric dirt.
4.6.3 Sizing of the Reservoir.
The reservoir capacity should be adequate to cater for changes in fluid volume within the
system, and with sufficient surface area to provide system cooling. An oversize reservoir can
present some disadvantages such as increased cost, size and longer warming-up periods when
starting from cold. There are many empirical rules for sizing reservoirs.
The sizing of a reservoir is based on the following criteria:
1. The minimum reservoir capacity should be twice the pump delivery per minute. This must
be regarded as an absolute minimum and may not be sufficient to allow for the volume
changes in the system.
2. The reservoir capacity should be three to four times the pump delivery per minute. This
may well be too high a volume for mobile application.
3. The reservoir capacity should be 2–15 L per installed horse power. This may result in very
large reservoirs when high-pressure systems are used.
4. It must make allowance for dirt and chips to settle and for air to escape.
5. It must be able to hold all the oil.
6. It must maintain the oil level high enough to prevent the whirlpool effect.
7. It should have a large surface area to dissipate heat generated in the system.
8. It should have an adequate air space to allow for the thermal expansion of oil.
4.6.4 Reservoir Design and Construction (Accessories of reservoir):
− The reservoir must be equipped with a filling point and an air vent point. These are often
combined as filler breather unit complete with a filling mesh.
− Combined units of this nature tend to have a slow filling rate and the filling mesh is often
deliberately punctured to speed up the inflow. This defeats its purpose and allows large dirt
into the reservoir.
− It is also very easy to leave the air-filter cap off after filling thereby permitting
contaminants to enter. It is better to have a separate filling point complete with a quick
release coupling and integral filler unit, in which case all the fluid is pumped into the
reservoir through the filter, spin-on air breather are available with a fine filter range: 25 m
absolute is typical ( 25 = 75).

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.24
− The pump suction line should be fitted with an adequately sized strainer. The strainer
should be located so that there is a well distributed flow and its lowest point should be at least
75 mm above the bottom of the reservoir (to prevent any debris on the bottom of the tank
being pulled into the suction line). The top of the strainer should be at least 150 mm below
the lowest fluid level to prevent a vortex being formed and air drawn into the suction line.
− System return lines and drain lines should terminate below the minimum fluid level to
prevent aeration of the fluid. The main returns should be fitted with diffusers that reduce the
return oil velocity and prevent turbulence. Where diffusers are not used, the end of return
lines should be cut at 45%. Return outlets should be carefully positioned to minimize
interaction between the return flow and the reservoir boundaries. If the return pipes have an
anti-syphon whole, aeration may be caused by the jet of fluid emanating from them during
normal operation. This can be reduced by fitting deflector plates.
− The reservoir must be fitted with some form of level indicator, generally a sight glass that
should have the minimum and maximum levels clearly marked. A float switch can be
incorporated to give an alarm or shut the pump down if the oil level falls below a certain
value. This is very important in large systems where there is a possibility of a pipe failure or
other sudden leak. Shutting the pump down protects the pump from cavitation and reduces
the spillage of fluid.
− Baffles are fitted in the reservoir to separate the return lines from the suction lines. They
create a long flow path, which reduces surging effects, encourages dirt separation and
improves cooling.
− A fine wire mesh baffle between 60 and 200 mesh size (250–75 m aperture), set at an
angle of 20–40to horizontal, with the top edge terminating below the fluid surface will
considerably aid the separation of entrained air.
− Wherever the hydraulic fluid is an oil and water emulsion, baffles should not be used as
they tend to separate emulsion. With these fluids, good circulation in the reservoir is
important to maintain emulsion.
− Figure 4.32 shows a reservoir designed to include most of these features. Although it is not
the best shape for heat dissipation, it has other merits.
− If the fluid temperature inside the reservoir varies outside specified limits, temperature
switches can be used to give a warning, switch in coolers or heaters, shut down pumps,
prevent start up, etc.
− Wherever systems operate outdoors in cold temperatures or, for example, servo systems,
which in order to preserve accuracy need to work at a constant temperature, heaters may be
incorporated. These are a special type of immersion heaters having a low wattage relative to
the surface area (maximum 6 W/m2).

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.25
Figure 4.32 - Reservoir design and construction.
4.7 HOSES
In many hydraulic systems where it is necessary to move the drive unit qlong with the oil
lines. In such places hydraulic hoses made of synthetic rubber are preferred. Plastic tubing are
also used in hydraulic systems to convey the fluid. The advantage of using rubber hose are:
1. Rubber hoses are flexible
2. Their capacity to absorb or withstand shock and vibration is much higher than the
tubes
3. They are easy to install and dismantle
4. They can be manufactured in long lengths
5. They are capable to take high pressure
However the following disadvantages are also to be noted:
1. They are poor in abrasion resistance
2. Their initial cost is higher
3. They are poor in weathering resistance
4.7.1 Construction of hydraulic hoses
− The constructional view of types of medium and high pressure flexible hoses is shown in
figure 4.33 and 4.34.
− They are generally made of rubber reinforced with fibre or steel braiding. Usually hoses are
constructed with an inner tube, re-reinforcement and an outer protective cover.
− The steel wire may be either spirally woven or cross woven. Spiral reinforced hoses are
stronger but the fitting are to be supplied by hose manufacturer.
− Cross woven braids tend to fail by brittle fracture at the place where wire cross. The
advantage of cross woven braids are that they are re-usable and can be assembled by the
users.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.26
− A hydraulic hose consists of an inner tube through which the fluid is conveyed and thus it
comes into direct contact with the hydraulic fluid.
− The rubber or other synthetic material used for this must be compatible as well as should be
able to withstand the range of working temperature without losing its chemical and physical
stability. Various types of synthetic material could be used for hoses for fluid power system.
Figure 4.33 - Types of flexible hoses, a, b, c – medium pressure d, e, f – medium high pressure
Figure 4.34 - Types of flexible hose – super high and heavy duty type including teflon and metallic
hoses
4.7.2 Hose material
1. Plastic:
− Homogeneous plastics can be used for 7-35 bar pressure only. They are temperature
dependent. The most commonly used plastics are nylon, polyethylene vinyl etc.

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.27
− A brief discussion about some of the materials used for hoses is done below.
a) Nylon
Good abrasion and impact resistance
Cannot be used above 15 bar pressure
Satisfactory working temp. range = 75 to 105 degree Celsius
Unsafe due to high temp. and moisture effect
b) Braided nylon hose
Used for medium to high pressure
Fatigue free hoses
Outer cover can be made by the Dacron
Polyurethane cover is compatible to both minerals and synthetic hydraulic
fluids
Cheaper, lighter in weight and last longer than rubber and wire tubes
Expands less and dimensionally stable when pressurised compared to other
materials
c) Polyvinyl chloride
Low pressure pneumatic applications only
More flexible than nylon and polyethylene
Can be produced in longer lengths
Poor temp. capacity (-10 to +40o c)
Poor abrasion and corrosion resistance – reduced working life
d) Thermoplasts
Working temp. range = -40 to +110 o c
Can be used with any type of liquid
e) Ethylene propylene diene (EPDM)
Excellent weathering, ozone and heat resistance
Poor compatibility with petroleum based oils and very good for phosphate
ester
It is also compatible with water glycol though its resistance to flame is poor
Its low temp. resistance is good
f) Chlorinated polyethylene:
Excellent for water glycol and water oil emulsions as well as petroleum base
oils and very good for phosphate ester
Ozone resistance, permeability are also good which makes it ideal hose
material for general purpose hydraulic system
2. Homogeneous synthetic rubber:
Various types of synthetic elastomers are used for medium to high pressure hydraulic system
as inner tube as given below.
a) Buna N
It is also known as nitrile rubber
Most commonly used within temp. range = -50 to +150 oc

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.28
It is a synthetic rubber and can be used with petroleum based oils but not with
fire resistant phosphate ester based fluids
b) Neoprene
It is also known as chloroprene
Good oil resistance but is not resistant to aromatic hydrocarbons
Very good abrasion resistance
When used with oil, moderate swelling may occur with passage of time
c) Natural rubber
Mostly used in lines only
Can be used with water glycol based fluid
It is not oil resistant and will swell to over 20% of its original size when used
with petroleum based fluids though it is very good in its abrasion resistance
property too
d) Butyl
Synthetic compound suitable for use within the temp. range of -50 to +150oc
Very poor oil resistance and deteriorates rapidly if it comes into contact with
petroleum based fluids
Extremely compatible with phosphate ester oils
4.7.3 Installation of hoses
To avoid frequent maintenance and to facilitate easy working to increase the service life of
the hoses, the following points are of most important to the machine builders and
maintenance mechanics.
1. While connecting two elements through a hose, it will be better if excessive taut in the
connected hose is a avoided
2. Some slackness is to be permitted to avoid strain to the hose as it is noted that when
pressure is applied to hose, the hose tends to bulge and decrease in length.
Elastomeric hoses fastened between two fixed points are found to have about 5%
change ion length.
3. Similarly enough slackness is also helpful to avoid kinking of the hose. It should be
noted that only the hose and not the fitting is flexible. Hence the hose run should be
long enough to bend during the machine movement.
4. Hoses should never be installed with a twisting as to much twisting may weaken the
hose structurally and may also cause to loosen the fittings.
5. Sometimes to avoid long loops, a number of fittings may have to be used. However,
one should not forget that more number of fittings may be detrimental to the system
performance as lot of heat may be generated due to excessive number of line fittings.
6. High temp. may damage the hose cover and may shorten the useful life. Hence under
hot working condition it is better if the hoses are protected through proper heat
insulation by using fire sleeves or only heat resistant hose material.
7. Design and installation of the hose run should be such that rubbing and abrasion with
the metal members of the system are avoided. Clamps are very often used to group the

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.29
hoses and keep them away from the moving parts. Hose guards are also used for this
purpose.
8. During installation of hoses in a hydraulic system it is important to take into
consideration the manufacturer’s instructions and recommendations. The hose
manufacturers guidance and specific instruction should be given maximum
importance with regard to bend radius, environment and oil compatibility, pressure
capacity etc.
4.8 HEAT EXCHANGERS (HEATING AND COOLING DEVICES)
If oil gets overheated, then its good properties like viscosity, lubricity, and corrosion
resistance oxidation stability etc. get destroyed. In-turn, the oil itself becomes
corrosive and acidic, and it starts corroding the metal components internally.
So it is very important to maintain oil temperature within limits. Several types of
circuits are used to avoid over heating of oil. And several types of heat exchangers are
used to cool the hot hydraulic oil.
4.8.1 Types of Heat Exchangers
1. Based on construction
Tubular
Double pipe heat exchangers
Shell and tube heat exchangers
Spiral heat exchangers
Plate-type
Plate and frame heat exchangers
Spiral plate heat exchangers
Extended surface
Plate-fin exchanger
Tube-fin exchanger
2. Based on direction of flow
Parallel Flow/ Co - current Flow Counter Flow Cross Flow
Figure 4.35 – Direction of flow

Oil Hydraulics and Pneumatics (2171912) 4. Hydraulic Valves and Accessories
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 4.30
Shell and Tube Heat Exchanger
This is the most common type of heat exchanger used in hydraulic systems.
The shell and tube heat exchanger consists of a bundle of tubes properly secured at
either ends in tube plates. The tube plates have drilled holes into which the tubes are
fixed using different techniques to have leak proof joints.
The entire tube bundle is placed inside the closed shell, which seals around the tube
sheet periphery to form the two immiscible zones for hot and cold fluids.
4.36 - Shell and Tube Heat Exchanger
Cold water (coolant) flows inside the tubes while the hot oil flows outside the tubes in
the shell. For proper distribution of shell side fluid over the tubes, baffles are placed
normal to the tube bundle. This baffle creates turbulence in the shell side fluid and
enhances the heat transfer.
Heat is transferred from hot oil to cold water. The cold water takes away the heat of
hot oil, and hence the oil gets cooled.

Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.1
5 DESIGN OF HYDRAULIC CIRCUITS
Course Contents
5.1 Control of a single-acting
hydraulic cylinder
5.2 Control of a double-acting
hydraulic cylinder
5.3 Regenerative cylinder circuit
5.4 Double-pump hydraulic system
(unloading circuit)
5.5 Counterbalance valve
application
5.6 Hydraulic cylinder sequencing
circuits
5.7 Automatic cylinder
reciprocating system
5.8 Cylinder synchronizing circuits
5.9 Speed control of a hydraulic
cylinder
5.10 Fail-Safe Circuits

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.2
A hydraulic circuit is a group of components such as pumps, actuators, control valves,
conductors and fittings arranged to perform useful work. There are three important
considerations in designing a hydraulic circuit:
1. Safety of machine and personnel in the event of power failures.
2. Performance of given operation with minimum losses.
3. Cost of the component used in the circuit.
5.1 CONTROL OF A SINGLE-ACTING HYDRAULIC CYLINDER
Figure 5.1 - Control of a single-acting cylinder
− Figure 5.1 shows that the control of a single-acting, spring return cylinder using a three-
way two-position manually actuated, spring offset direction-control valve (DCV). In the
spring offset mode, full pump flow goes to the tank through the pressure-relief valve (PRV).
− The spring in the rod end of the cylinder retracts the piston as the oil from the blank end
drains back into the tank. When the valve is manually actuated into its next position, pump
flow extends the cylinder.
− After full extension, pump flow goes through the relief valve. Deactivation of the DCV
allows the cylinder to retract as the DCV shifts into its spring offset mode.
5.2 CONTROL OF A DOUBLE-ACTING HYDRAULIC CYLINDER
The circuit diagram to control double-acting cylinder is shown in Fig. 5.2. The control of a
double-acting hydraulic cylinder is described as follows:
− When the 4/3 valve is in its neutral position (tandem design), the cylinder is hydraulically
locked and the pump is unloaded back to the tank.

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.3
Figure 5.2 - Control of a double-acting cylinder
− When the 4/3 valve is actuated into the flow path, the cylinder is extended against its load
as oil flows from port P through port A. Oil in the rod end of the cylinder is free to flow back
to the tank through the four-way valve from port B through port T.
− When the 4/3 valve is actuated into the right-envelope configuration, the cylinder retracts
as oil flows from port P through port B. Oil in the blank end is returned to the tank via the
flow path from port A to port T.
− At the ends of the stroke, there is no system demand for oil. Thus, the pump flow goes
through the relief valve at its pressure level setting unless the four-way valve is deactivated.
5.3 REGENERATIVE CYLINDER CIRCUIT
Figure 5.3 shows a regenerative circuit that is used to speed up the extending speed of a
double-acting cylinder. The pipelines to both ends of the hydraulic cylinder are connected in
parallel and one of the ports of the 4/3 valve is blocked by simply screwing a thread plug into
the port opening.
− During retraction stroke, the 4/3 valve is configured to the right envelope. During this
stroke, the pump flow bypasses the DCV and enters the rod end of the cylinder. Oil from the
blank end then drains back to the tank through the DCV.
− When the DCV is shifted in to its left-envelope configuration, the cylinder extends as
shown in Fig. 5.3. The speed of extension is greater than that for a regular double-acting
cylinder because the flow from the rod end regenerates with the pump flow QP to provide a
total flow rate QT.

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.4
Figure 5.3 - Regenerative circuit
5.4 DOUBLE-PUMP HYDRAULIC SYSTEM (UNLOADING CIRCUIT)
Figure 5.4 shows an application for an unloading valve. It is a circuit that uses a high-
pressure, low-flow pump in conjunction with a low-pressure, high-flow pump.
− A typical application is a sheet metal punch press in which the hydraulic cylinder must
extend rapidly over a great distance with low-pressure but high-flow requirements. This
occurs under no load.
− However during the punching operation for short motion, the pressure requirements are
high, but the cylinder travel is small and thus the flow requirements are low. The circuit in
Fig. 5.4 eliminates the necessity of having a very expensive high-pressure, high-flow pump.
− When the punching operation begins, the increased pressure opens the unloading valve to
unload the low-pressure pump. The purpose of relief valve is to protect the high-pressure
pump from over pressure at the end of cylinder stroke and when the DCV is in its spring-
centered mode.
− The check valve protects the low-pressure pump from high pressure, which occurs during
punching operation, at the ends of the cylinder stroke and when the DCV is in its spring-
centered mode.

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.5
Figure 5.4 - Double-pump circuit
5.5 COUNTERBALANCE VALVE APPLICATION
Figure 5.5 - Counterbalance valve in circuit
− A counterbalance valve (Fig. 5.5) is applied to create a back pressure or cushioning
pressure on the underside of a vertically moving piston to prevent the suspended load from
free falling because of gravity while it is still being lowered.

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.6
5.5.1 Valve Operation (Lowering)
− The pressure setting on the counterbalance valve is set slightly higher than the pressure
required to prevent the load from free falling. Due to this back pressure in line A, the actuator
piston must force down when the load is being lowered.
− This causes the pressure in line A to increase, which raises the spring-opposed spool, thus
providing a flow path to discharge the exhaust flow from line A to the DCV and then to the
tank.
− The spring-controlled discharge orifice maintains back pressure in line A during the entire
downward piston stroke.
5.5.2 Valve Operation (Lifting)
As the valve is normally closed, flow in the reverse direction (from port B to port A) cannot
occur without a reverse free-flow check valve.
− When the load is raised again, the internal check valve opens to permit flow for the
retraction of the actuator.
5.5.3 Valve Operation (Suspension)
When the valve is held in suspension, the valve remains closed. Therefore, its pressure setting
must be slightly higher than the pressure caused by the load. Spool valves tend to leak
internally under pressure. This makes it advisable to use a pilot-operated check valve in
addition to the counterbalance valve if a load must be held in suspension for a prolonged
time.
5.6 HYDRAULIC CYLINDER SEQUENCING CIRCUITS
Hydraulic cylinders can be operated sequentially using a sequence valve. Figure 5.6 shows
that two sequence valves are used to sequence the operation of two double-acting cylinders.
− When the DCV is actuated to its right-envelope mode, the bending cylinder (B) retracts
fully and then the clamp cylinder (A) retracts.
− This sequence of cylinder operation is controlled by sequence valves. This hydraulic circuit
can be used in a production operation such as drilling.
− Cylinder A is used as a clamp cylinder and cylinder B as a drill cylinder.
− Cylinder A extends and clamps a work piece. Then cylinder B extends to drive a spindle to
drill a hole. Cylinder B retracts the drill spindle and then cylinder A retracts to release the
work piece for removal.
5.7 AUTOMATIC CYLINDER RECIPROCATING SYSTEM
The hydraulic circuit shown in Fig. 5.7 produces continuous reciprocation of a double-acting
cylinder using two sequence valves. Each sequence valve senses the completion of stroke by
the corresponding build-up pressure. Each check valve and the corresponding pilot line
prevent the shifting of the four-way valve until the particular stroke of the cylinder is
completed.

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.7
− The check valves are needed to allow pilot oil to leave either end of the DCV while the pilot
pressure is applied to the opposite end. This permits the spool of the DCV to shift as required.
Figure 5.6 - Sequencing circuit Figure 5.7 - Automatic Cylinder Reciprocating
System
5.8 CYLINDER SYNCHRONIZING CIRCUITS
In industry, there are instances when a large mass must be moved, and it is not feasible to
move it with just one cylinder. In such cases we use two or more cylinders to prevent a
moment or moments that might distort and damage the load. For example, in press used for
moulding and shearing parts, the platen used is very heavy. If the platen is several meter
wide, it has to be of very heavy construction to prevent the damage when it is pressed down
by a single cylinder in the middle. It can be designed with less material if it is pressed down
with two or more cylinders. These cylinders must be synchronized. There are two ways that
can be used to synchronize cylinders: Parallel and series.
5.8.1 Cylinders in Parallel
Figure 5.8 shows a hydraulic circuit in which two cylinders are arranged in parallel. When
the two cylinders are identical, the loads on the cylinders are identical, and then extension
and retraction are synchronized. If the loads are not identical, the cylinder with smaller load
extends first. Thus, the two cylinders are not synchronized. Practically, no two cylinders are
identical, because of packing (seals) friction differences. This prevents cylinder
synchronization for this circuit.

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.8
5.8.2 Cylinders in Series
During the extending stroke of cylinders, fluid from the pump is delivered to the blank end of
cylinder 1. As cylinder 1 extends, fluid from its rod end is delivered to the blank end of
cylinder 2 causing the extension of cylinder 2. As cylinder 2 extends, fluid from its rod end
reaches the tank.
− For two cylinders to be synchronized, the piston area of cylinder 2 must be equal to the
difference between the areas of piston and rod for cylinder 1. Thus, applying the continuity
equation,
Figure 5.8 - Cylinders in parallel and series
Qout (Cylinder 1) = Qin (Cylinder 2)
We get
(Ap1 – Ar1) v1 = Ap2 v2
For synchronization, v1 = v2. Therefore,
(Ap1 – Ar1) = Ap2 (5.8.1)
− The pump must deliver a pressure equal to that required for the piston of cylinder 1 by itself
to overcome loads acting on both extending cylinders. We know that the pressure acting at
the blank end of cylinder 2 is equal to the pressure acting at the rod end of cylinder 1.

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.9
Forces acting on cylinder 1 give
p1Ap1 – p2 (Ap1 –Ar1) = F1
Forces acting on cylinder 2 give
P2Ap2 – p2 (Ap2 –Ar2) = F2
Using Eq. (5.8.1) and noting that p3 = 0 (it is connected to the tank), we have
p1Ap1 – p2Ap2 = F1
(5.8.2)
p2Ap2 – 0 = F2
(5.8.3)
Now, Eq. (5.8.2) + Eq. (5.8.3) gives
p1Ap1 = F1 + F2
(5.8.4)
If Eqs. (5.8.1) and (5.8.4) are met in a hydraulic circuit, the cylinders hooked in series operate
in synchronization.
5.9 SPEED CONTROL OF A HYDRAULIC CYLINDER
− The speed control of a hydraulic cylinder circuit can be done during the extension stroke
using a flow-control valve (FCV). This is done on a meter-in circuit and meter-out circuit
as shown in Fig. 5.9.
− Refer to Fig. 5.9 (a). When the DCV is actuated, oil flows through the FCV to extend the
cylinder. The extending speed of the cylinder depends on the FCV setting. When the DCV is
deactivated, the cylinder retracts as oil from the cylinder passes through the check valve.
Thus, the retraction speed of a cylinder is not controlled.
− Figure 5.9 (b) shows meter-out circuit; when DCV is actuated, oil flows through the rod end
to retract the cylinder.
5.9.1 Meter-In Versus Meter-Out Flow-Control Valve Systems
− In Section 5.9, the FCV is placed in the line leading to the inlet port of the cylinder. Thus, it
is called the meter-in control of speed. Meter-in flow controls the oil flow rate into the
cylinder.
− A meter-out flow control system is one in which the FCV is placed in the outlet line of the
hydraulic cylinder. Thus, a meter-out flow control system controls the oil flow rate out of the
cylinder.
− Meter-in systems are used primarily when the external load opposes the direction of motion
of the hydraulic cylinder. When a load is pulled downward due to gravity, a meter-out system
is preferred. If a meter-in system is used in this case, the load would drop by pulling the
piston rod, even if the FCV is completely closed.
− One drawback of a meter-out system is the excessive pressure build-up in the rod end of the
cylinder while it is extending. In addition, an excessive pressure in the rod end results in a

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.10
large pressure drop across the FCV. This produces an undesirable effect of a high heat
generation rate with a resulting increase in oil temperature.
Figure 5.9 - Speed control of cylinders: (a) Meter in and (b) meter out.
5.10 Fail-Safe Circuits
Fail-safe circuits are those designed to prevent injury to the operator or damage to the
equipment. In general, they prevent the system from accidentally falling on an operator and
also prevent overloading of the system. In following sections we shall discuss two fail-safe
circuits: One is protection from inadvertent cylinder extension and other is fail-safe overload
protection.
1. Protection from inadvertent cylinder extension:
− Figure 5.10 shows a fail-safe circuit that is designed to prevent the cylinder from
accidentally falling in the event when a hydraulic line ruptures or a person inadvertently
operates the manual override on the pilot-actuated DCV when the pump is not working.
− To lower the cylinder, pilot pressure from the blank end of piston must pilot open the check
valve to allow oil to return through the DCV to the tank.
− This happens when the push button is actuated to permit the pilot pressure actuation of
DCV or when the DCV is directly manually actuated when the pump operates.

Oil Hydraulics and Pneumatics (2171912) 5. Design of Hydraulic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 5.11
− The pilot-operated DCV allows free flow in the opposite direction to retract the cylinder
when this DCV returns to its offset mode.
2. Fail-Safe System with Overload Protection:
− Figure 5.11 shows a fail-safe system that provides overload protection for system
components. The DCV V1 is controlled by the push-button three-way valve V2.
− When the overload valve V3 is in its spring offset mode, it drains the pilot line of valve V1.
If the cylinder experiences excessive resistance during the extension stroke, sequence valve
V4 pilot-actuates overload valve V3.
− This drains the pilot line of valve V1 causing it to return to its spring offset mode. If a
person then operates the push-button valve V2 nothing happens unless overload valve V3 is
manually shifted into its blocked-port configuration.
− Thus, the system components are protected against excessive pressure due to an excessive
cylinder load during its extension stroke.
Figure 5.10 - Fail-safe circuits – Inadvertent Figure 5.11 - Fail-safe circuits -
Cylinder Extension Overload Protection.


Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.1
6 INTRODUCTION PNEUMATIC SYSTEM
Course Contents
6.1 Pneumatics and its meaning
6.2 Choice of working medium and
system
6.3 Applications of pneumatics
6.4 Properties of air
6.5 Gas laws
6.6 Basic components of
pneumatic system
6.7 Valves

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.2
6.1 PNEUMATICS AND ITS MEANING
− The English word pneumatic and its associate noun pneumatics are derived from the Greek
“pneuma” meaning breath or air. Originally coined to give a name to the science of the
motions and properties of air. Compressed air is a vital utility- just like water, gas and
electricity used in countless ways to benefit everyday life.
− Pneumatics is application of compressed air (pressurized air) to power machine or control
or regulate machines. Simply put, Pneumatics may be defined as branch of engineering
science which deals with the study of the behaviour and application of compressed air.
Pneumatics can also be defined as the branch of fluid power technology that deals with
generation, transmission and control of power using pressurized air. Gas in a pneumatic
system behaves like a spring since it is compressible.
− Any gas can be used in pneumatic system but air is the most usual, for obvious reasons.
Exceptions are most likely to occur on aircraft and space vehicles where an inert gas such as
nitrogen is preferred or the gas is one which is generated on board. Pure nitrogen may be used
if there is a danger of combustion in a work environment. In Pneumatic control, compressed
air is used as the working medium, normally at a pressure from 6 bar to 8 bar. Using
Pneumatic
− Control, maximum force up to 50 kN can be developed. Actuation of the controls can be
manual, Pneumatic or Electrical actuation. Signal medium such as compressed air at pressure
of 1-2 bar can be used [Pilot operated Pneumatics] or Electrical signals [D.C or A.C source-
24V – 230V] can be used [Electro pneumatics]
6.2 CHOICE OF WORKING MEDIUM AND SYSTEM
− The choice of medium depends on the application. Some of the general, broad rules
followed in the selection of a working medium are listed below.
− When the system requirement is high speed, medium pressure (usually 6 to 8 bar) and less
accuracy of position, then pneumatic system is preferred.
− If the system requirement is high pressure and high precision, a fluid system with oil is
good.
− When the power requirement is high like in forging presses, sheet metal press, it is
impossible to use air system. Oil hydraulics is the only choice
− Air is used where quick response of actuator is required.
− If temperate variation range in the system is large, then use of air system may run into
condensation problems and oil is preferred.
− If the application requires only a medium pressure and high positional accuracy is required
then hydro –pneumatic system is preferred
− Air is non-explosive, it is preferred where fire/electric hazard are expected. Oil systems are
more prone to fire and electrical hazards and are not recommended in such applications.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.3
− Because air contains oxygen (about 20%) and is not sufficient alone to provide adequate
lubrication of moving parts and seals, oil is usually introduced into the air stream near the
actuator to provide this lubrication preventing excessive wear and oxidation.
In a practical sense, compressed air is a medium that carries potential energy. However it can
be expensive to produce, and from a simple energy efficiency point of view compressed air
may not appear advantageous at first. Considering that it takes about 6 kW of electrical
energy to generate 0.75 kW output on an air motor, compressed air has an efficiency rating of
only 12%. In spite of that compressed air is used due to its other advantages.
Table 6.1 - The advantages and disadvantages of compressed air
Advantages of compressed air Disadvantages of compressed air
Air is available in unlimited quantities.
Compressed air is easily conveyed in
pipelines even over longer distances
Compressive air is relatively expensive
means of conveying energy
The higher costs are, however. Largely
compensated by the cheaper elements.
Simpler and more compact equipment
Compressed air can be stored
Compressed air requires good
conditioning. No dirt or moisture
residues may be contained in it. Dirt and
dust leads to wear on tools and
equipment
Compressed air need not be returned. It
can be vented to atmosphere after it has
performed work
It is not possible to achieve uniform and
constant piston speeds( air is
compressible)
Compressed air is insensitive to
temperature fluctuation. This ensures
reliable operation even in extreme
temperature conditions
Compressed air is economical ony up to
certain force expenditure. Owing to the
commonly used pressure of 7 bar and
limit is about 20 to 50 kN, depending on
the travel and the speed. If the force
which is required exceeds this level,
hydraulics is preferred
Compressed air is clean. This is
especially important in food,
pharmaceutical, textile, beverage
industries
The exhaust is loud. As the result of
intensive development work on
materials for silencing purposes, this
problems has however now largely been
solved
Operating elements for compressed air
operation are of simple and inexpensive
construction.
The oil mist mixed with the air for
lubricating the equipment escapes with
the exhaust to atmosphere.
Compressed air is fast. Thus, high
operational speed can be attained.
Air due to its low conductivity , cannot
dissipate heat as much as hydraulic fluid
Speeds and forces of the pneumatics
elements can be infinitely adjusted
Air cannot seal the fine gaps between
the moving parts unlike hydraulic
system
Tools and operating elements are
overload proof. Straight line movement
can be produced directly
Air is not a good lubricating medium
unlike hydraulic fluid.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.4
6.3 APPLICATIONS OF PNEUMATICS
− Pneumatic systems are used in many applications. New uses for pneumatics are constantly
being discovered. In construction, it is indispensable source of power for such tools as air
drills, hammers, wrenches, and even air cushion supported structures, not to mention the
many vehicles using air suspension , braking and pneumatic tires.
− In manufacturing, air is used to power high speed clamping, drilling, grinding, and
assembly using pneumatic wrenches and riveting machines. Plant air is also used to power
hoists and cushion support to transport loads through the plant.
− Many recent advances in air – cushion support are used in the military and commercial
marine transport industry.
Some of the Industrial applications of pneumatics are listed in the Table 6.2.
Table 6.2 - Industrial applications of Pneumatics
Material
Handling Manufacturing
Other
applications
Clamping
Shifting
positioning
Orienting
Feeding
Ejection
Braking
Bonding
Locking
Packaging
Feeding
Sorting
stacking
Drilling
Turning
Milling
Sawing
Finishing
Forming
Quality Control
Stamping
Embossing
Filling
Aircraft
Cement plants
chemical plants
Coal mines
Cotton mills
Dairies
Forge shops
Machine tools
Door or chute
control
Turning and
inverting parts
6.4 PROPERTIES OF AIR
Composition:
− Air is one of the three states of matter. It has characteristics similar to those of liquids in
that it has no definite shape but conforms to the shape of its container and readily transmits
pressure. Gases differ from liquids in that they have no definite volume. That is, regardless of
the size or shape of the containing vessel, a gas will completely fill it.
− Gases are highly compressible, while liquids are only slightly so. Also, gases are lighter
than equal number of liquids, making gases less dense than liquids.
− Air is a mechanical mixture of gases containing by volume, approximately 78 % of
nitrogen and 21 % of oxygen, and about 1 % of other gases, including argon and carbon
dioxide. Water being the most important remaining ingredient as far as pneumatics is
concerned. The dilution of the oxygen by nitrogen makes air much less chemically active
than pure oxygen but it is still capable of causing spontaneous combustion or explosion,
particularly if oil vapor at an elevated temperature is present, as may occur in an air receiver.
− Air is colourless, odourless, tasteless, and compressible and has weight. Air has a great
affinity with water and unless specifically dried, contains considerable quantities of water

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.5
vapour, sometimes as much as 1% by weight. Life on earth depends on air for survival and
man harness its forces to do useful work. Table 1.3 gives the physical properties of air
Table 6.3 - Properties of air
Property Value
Molecular weight 28.96 kg/kmol
Density of air at 15 and 1
bar 1.21 kg/m3
Boiling point at 1 bar 191 to -194
Freezing point at 1 bar -212 to -216
Gas constant 286.9 J/kg K
Free air and Standard air
In pneumatics, the existence of the following two conditions of atmospheric air is well
accepted
• Free air: Air at the atmospheric condition at the point where the compressor is located is
defined as free air. Free air will vary with atmospheric conditions like altitude, pressure and
temperature.
• Standard air: It is also called normal air. It is defined as the air at sea level conditions
(1.01324 bar as per ISO –R554 and 20 and Relative humidity of 36%). The condition of
normal atmosphere is used as a basis for getting average values for compressor delivery
volumes, efficiencies and operating characteristics.
Atmospheric pressure, Gauge pressure and Absolute pressure
− Air has mass and exerts a pressure on the surface of the earth. A barometer consisting of an
inverted tube close at the top will support a column of mercury at exactly 760 mm at sea level
when measured at standard conditions.
− Pressure above one atmosphere (~ 1 bar) are positive, whereas the pressure below one
atmosphere cause a vacuum to be formed.
− Both positive pressures and vacuum pressures have useful purposes in pneumatics. Vacuum
measurement is usually given a mm of mercury and then converted into the holding force for
such devices such as suction pads and cylinders with a specified diameter.
Atmospheric pressure:
− The earth is surrounded by air. Since air has weight it can exert a pressure on the earth’s
surface. The weight of the column of air on one square meter of earth’s surface is known as
atmospheric pressure or reference pressure.
− The atmospheric pressure varies slightly from day to day. In pneumatic circuit calculations,
standard atmospheric pressure is taken as 101.325 kPa. (14.7 psia)(760 mm of Hg). The
atmospheric pressure is measured using barometer.
− Atmospheric pressure = Density x Acceleration due to gravity x height of barometer
column (usually mercury)
P atm = ρ g h

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.6
Gauge Pressure:
− In pneumatic application, pressure is measured using pressure gage and pressure gauges are
calibrated to indicate the pressure above that of the Atmospheric pressure. Gauge pressure
refers to pressure indicated by pressure gauge.
Absolute pressure:
− Refers to the true or total pressure.
Absolute pressure = Atmospheric pressure + Gauge pressure.
− Calculations involving formulae associated with the Gas laws must be made with absolute
pressure. Figure 6.1 shows the difference between the gauge and absolute pressure.
Figure 6.1 - Difference between absolute and gauge pressure
6.5 GAS LAWS
Early experiments were conducted concerning the behaviour of air and similar gases. These
experiments were conducted by scientists such as Boyle, Charles and Gay-Lussac. The results
of their experiments indicated that gases behaviours follow the law known as ideal gas laws.
6.5.1 Boyle’s Law
− Robert Boyle (1627-1691), an English scientist, was among the first to experiment with the
pressure volume relationship of gas at constant temperature.
− Statement: If a given mass of a gas is compressed or expanded at a constant temperature,
then the absolute pressure is inversely proportional to the volume.
𝑃𝑟𝑒𝑠𝑠𝑢𝑟𝑒 𝛼 1
𝑉𝑜𝑙𝑢𝑚𝑒 When temperature = constant
or pV = Constant for state 1 and 2

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.7
6.5.2 Charle’s law
− Boyle’s law assumes conditions of constant temperature. In actual situations this is rarely
the case. Temperature changes continually and affects the volume of a given mass of gas.
− Jacques Charles (1746 to 1823),a French physicist, provided much of the foundations for
modern kinetic theory of gases. Through experiments, he found that all gases expand and
contract proportionally to the change in the absolute temperature, providing the pressure
remains constant.
− Statement: If a given mass of a gas is heated or cooled at a constant pressure, then the
volume is directly proportional to the absolute temperature.
Volume α Temperature, when Pressure = Constant
Or V/T = constant, for state 1 and 2
6.5.3 Gay-Lussac’s Law
− A third gas law may be derived as a corollary to Boyle's and Charles's laws. Suppose we
double the thermodynamic temperature of a sample of gas. According to Charles’s law, the
volume should double. Now, how much pressure would be required at the higher temperature
to return the gas to its original volume? According to Boyle’s law, we would have to double
the pressure to halve the volume. Thus, if the volume of gas is to remain the same, doubling
the temperature will require doubling the pressure. This law was first stated by the
Frenchman Joseph Gay-Lussac (1778 to 1850).
− Statement: At constant pressure, the absolute pressure of an ideal gas will vary directly with
the absolute temperature.
Pressure α Temperature, When volume = constant
Or P/T = constant
6.5.4 General gas equation
− For any given mass of gas undergoing changes of pressure, temperature and volume, the
general gas equation can be used. By combining Boyle’s law and Gay-Lussac’s law we get,
6.6 BASIC COMPONENTS OF PNEUMATIC SYSTEM
Important components of a pneumatic system are shown in figure 6.2.
a) Air filters: These are used to filter out the contaminants from the air.
b) Compressor: Compressed air is generated by using air compressors. Air compressors are
either diesel or electrically operated. Based on the requirement of compressed air, suitable
capacity compressors may be used.
c) Air cooler: During compression operation, air temperature increases. Therefore coolers
are used to reduce the temperature of the compressed air.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.8
Figure 6.2 - Components of a pneumatic system
d) Dryer: The water vapor or moisture in the air is separated from the air by using a dryer.
e) Control Valves: Control valves are used to regulate, control and monitor for control of
direction flow, pressure etc.
f) Air Actuator: Air cylinders and motors are used to obtain the required movements of
mechanical elements of pneumatic system.
g) Electric Motor: Transforms electrical energy into mechanical energy. It is used to drive
the compressor.
h) Receiver tank: The compressed air coming from the compressor is stored in the air
receiver.
Advantages of Pneumatic system
− Low inertia effect of pneumatic components due to low density of air.
− Pneumatic Systems are light in weight.
− Operating elements are cheaper and easy to operate
− Power losses are less due to low viscosity of air
− High output to weight ratio
− Pneumatic systems offers a safe power source in explosive environment
− Leakage is less and does not influence the systems. Moreover, leakage is not harmful
Disadvantages of Pneumatic systems
− Suitable only for low pressure and hence low force applications
− Compressed air actuators are economical up to 50 kN only.
− Generation of the compressed air is expensive compared to electricity

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.9
− Exhaust air noise is unpleasant and silence has to be used.
− Rigidity of the system is poor
− Weight to pressure ratio is large
− Less precise. It is not possible to achieve uniform speed due to compressibility of air
− Pneumatic systems is vulnerable to dirt and contamination
Table 6.4 - Comparison of Electrical, mechanical, pneumatic and hydraulic transmission systems
Property Electrical/Mechanical Pneumatic Hydraulic
Energy
IC engines, electrical
energy is used to drive
motors
Electrical energy is
used to drive
compressor and other
equipment
I C Engines
Electric Motor
Air Turbine are used
to drive hydraulic
pumps.
Medium
. There is no medium,
Energy is transferred
through Levers, Gears,
Shafts
Compressed air/gas
in Pipes and hoses
Pressurized liquid in
Pipes and hoses
Energy storage Batteries Reservoir, air tank Accumulators
Regulations Variable frequency
drives Pneumatic valves Hydraulic valves
Transmitters
Transmitted through
mechanical
components like levers,
gears, cams, screw etc
Transmitted through
pneumatic cylinders ,
rotary drives and
rotary actuators
Transmitted through
hydraulic cylinders,
and hydraulic rotary
actuators.
Distribution system
efficiency Good
Limited (say up to
1000m)
Good (say up to 100
m)
Operating speed Low Limited (up to 1.5
m/s)
Limited (up to 0.5
m/s)
Positioning accuracy
Precision in terms of
few micron can be
achieved
. Precision in terms of
few mm ( usually 0.1
mm) can be achieved
Precision in terms of
few micron can be
achieved
Stability
Good stability is
possible using
mechanical elements
. Low stability is due
to High
compressibility of air
Good stability is
possible due to low
compressibility
Forces
Mechanical elements
break down if
overloaded. Poor
overloading capacity
Protected against
overload with system
pressure of 6 to 8 bar,
forces up to 50 kN
can be generated.
Protected against
overload with high
system pressure of 600
bar, very large forces
can be generated.
Cost of energy Lowest Highest Medium
Linear actuators
Short stroke length
using
mechanical/electrical
transmission elements
Is possible using
pneumatic actuators
(cylinders), it can
produce medium
force.
Is possible using
hydraulic
actuators(cylinders),
and it can produce
heavy force
Rotary actuators AC , DC, Servo motors
and steeper motors can
Pneumatic rotary
actuators can be used
Hydraulic motors and
vane motors can be

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.10
be used used
Controllable force
Possible with solenoid
and DC motors, Needs
cooling and hence
complicated
medium force can be
controlled easily
High force can be
controlled
6.6.1 Receiver tank
− The air is compressed slowly in the compressor. But since the pneumatic system needs
continuous supply of air, this compressed air has to be stored. The compressed air is stored in
an air receiver as shown in Figure 6.3. The air receiver smoothens the pulsating flow from the
compressor. It also helps the air to cool and condense the moisture present.
− The air receiver should be large enough to hold all the air delivered by the compressor. The
pressure in the receiver is held higher than the system operating pressure to compensate
pressure loss in the pipes. Also the large surface area of the receiver helps in dissipating the
heat from the compressed air. Generally the size of receiver depends on,
− Delivery volume of compressor.
− Air consumption.
− Pipeline network
− Type and nature of on-off regulation
− Permissible pressure difference in the pipelines
Figure 6.3 - Air receiver
6.6.2 Compressor
− It is a mechanical device which converts mechanical energy into fluid energy. The
compressor increases the air pressure by reducing its volume which also increases the
temperature of the compressed air.
− The compressor is selected based on the pressure it needs to operate and the delivery
volume.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.11
− The compressor can be classified into two main types
a. Positive displacement compressors and
b. Dynamic displacement compressor
− Positive displacement compressors include piston type, vane type, diaphragm type and
screw type.
Piston compressors
Figure 6.4 - Single acting piston compressor
− Piston compressors are commonly used in pneumatic systems. The simplest form is single
cylinder compressor (Figure 6.4). It produces one pulse of air per piston stroke.
− As the piston moves down during the inlet stroke the inlet valve opens and air is drawn into
the cylinder. As the piston moves up the inlet valve closes and the exhaust valve opens which
allows the air to be expelled. The valves are spring loaded.
− The single cylinder compressor gives significant amount of pressure pulses at the outlet
port. The pressure developed is about 3-40 bar.
Double acting compressor
− The pulsation of air can be reduced by using double acting compressor as shown in Figure
6.5. It has two sets of valves and a crosshead.
− As the piston moves, the air is compressed on one side whilst on the other side of the
piston, the air is sucked in. Due to the reciprocating action of the piston, the air is compressed
and delivered twice in one piston stroke. Pressure higher than 30bar can be produced.
Multistage compressor
− As the pressure of the air increases, its temperature rises. It is essential to reduce the air
temperature to avoid damage of compressor and other mechanical elements. The multistage
compressor with intercooler in-between is shown in Figure 6.6.
− It is used to reduce the temperature of compressed air during the compression stages. The
inter-cooling reduces the volume of air which used to increase due to heat.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.12
Figure 6.5 - Double acting piston compressor
Figure 6.6 - Multi-stage compressor
− The compressed air from the first stage enters the intercooler where it is cooled. This air is
given as input to the second stage where it is compressed again.
− The multistage compressor can develop a pressure of around 50 bar.
Combined two stage compressors
− In this type, two-stage compression is carried out by using the same piston (Fig. 6.7).
Initially when the piston moves down, air is sucked in through the inlet valve.
− During the compression process, the air moves out of the exhaust valve into the intercooler.
As the piston moves further the stepped head provided on the piston moves into the cavity
thus causing the compression of air. Then, this is let out by the exhaust port.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.13
Figure 6.7 - Combined to stage compressor
Diaphragm compressor
Figure 6.8 - Diaphragm compressor
− These are small capacity compressors. In piston compressors the lubricating oil from the
pistons walls may contaminate the compressed air.
− The contamination is undesirable in food, pharmaceutical and chemical industries. For such
applications diaphragm type compressor can be used. Figure 6.8 shows the construction of
Diaphragm compressor.
− The piston reciprocates by a motor driven crankshaft. As the piston moves down it pulls the
hydraulic fluid down causing the diaphragm to move along and the air is sucked in.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.14
− When the piston moves up the fluid pushes the diaphragm up causing the ejection of air
from the outlet port. Since the flexible diaphragm is placed in between the piston and the air
no contamination takes place.
Screw compressor
− Piston compressors are used when high pressures and relatively low volume of air is
needed. The system is complex as it has many moving parts. For medium flow and pressure
applications, screw compressor can be used. It is simple in construction with less number of
moving parts.
− The air delivered is steady with no pressure pulsation. It has two meshing screws. The air
from the inlet is trapped between the meshing screws and is compressed. The contact
between the two meshing surface is minimum, hence no cooling is required.
− These systems are quite in operation compared to piston type. The screws are synchronized
by using external timing gears.
Rotary vane compressors
− The principle of operation of vane compressor is similar to the hydraulic vane pump. Figure
6.9 shows the working principle of Rotary vane compressor. The unbalanced vane
compressor consists of spring loaded vanes seating in the slots of the rotor.
− The pumping action occurs due to movement of the vanes along a cam ring. The rotor is
eccentric to the cam ring.
− As the rotor rotates, the vanes follow the inner surface of the cam ring. The space between
the vanes decreases near the outlet due to the eccentricity. This causes compression of the air.
These compressors are free from pulsation. If the eccentricity is zero no flow takes place.
Figure 6.9 - Screw compressor
Liquid ring vane compressor
− Liquid ring vane compressor is a variation of vane compressors. Figure 6.10 shows the
construction of Liquid ring compressor. The casing is filled with liquid up to rotor center.
The air enters the compressor through the distributor fixed to the compressor.
− During the impeller rotation, the liquid will be centrifuged along the inner ring of the casing
to form the liquid ring.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.15
Figure 6.10 - Rotary vane compressor
− There are two suction and discharge ports provided in the distributor. During the first
quarter of cycle, the air is sucked in both suction chambers of the casing and during the
second quarter of the cycle, the air is compressed and pushed out through the two discharge
ports.
− During the third and fourth quarters of the cycle, the process is repeated. This type of
compressor has no leakage and has minimal friction. For smooth operation, the rotation speed
should be about 3000 rpm. The delivery pressure is low (about 5 bar).
Figure 6.11 - Liquid ring compressor
Lobe compressor
− The lobe compressor is used when high delivery volume but low pressure is needed. It
consists of two lobes with one being driven and the other driving.
− Figure 6.11 shows the construction and working of Lobe compressor. It is similar to the
Lobe pump used in hydraulic systems.
− The operating pressure is limited by leakage between rotors and housing. As the wear
increases during the operation, the efficiency falls rapidly.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.16
Figure 6.12 - Lobe compressor
6.6.3 Filter, regulator and lubrication (FRL) unit
Filter
− To prevent any damage to the compressor, the contaminants present in the air need to be
filtered out. This is done by using inlet filters. These can be dry or wet filters.
− Dry filters use disposable cartridges. In the wet filter, the incoming air is passed through an
oil bath and then through a fine wire mesh filter.
− Dirt particles cling to the oil drops during bubbling and are removed by wire mesh as they
pass through it. In the dry filter the cartridges are replaced during servicing. The wet filters
are cleaned using detergent solution.
Lubricators
− The compressed air is first filtered and then passed through a lubricator in order to form a
mist of oil and air to provide lubrication to the mating components. Figure 6.13 shows the
schematic of a typical lubricator. The principle of working of venture meter is followed in the
operation of lubricator.
− The compressed air from the dryer enters in the lubricator. Its velocity increases due to a
pressure differential between the upper and lower changer (oil reservoir). Due to the low
pressure in the upper chamber the oil is pushed into the upper chamber from the oil reservoir
through a siphon tube with check valve.
− The main function of the valve is to control the amount of oil passing through it. The oil
drops inside the throttled zone where the velocity of air is much higher and this high velocity
air breaks the oil drops into tiny particles. Thus a mist of air and oil is generated.
− The pressure differential across chambers is adjusted by a needle valve. It is difficult to
hold an oil mixed air in the air receiver as oil may settle down. Thus air is lubricated during
secondary air treatment process.
− Low viscosity oil forms better mist than high viscosity oil and hence ensures that oil is
always present in the air.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.17
Figure 6.13 - Air lubricator
Pressure regulation
In pneumatic systems, during high velocity compressed air flow, there is flow-dependent
pressure drop between the receiver and load (application). Therefore the pressure in the
receiver is always kept higher than the system pressure. At the application site, the pressure is
regulated to keep it constant. There are three ways to control the local pressure, these are
shown in Figure 6.14.
− In the first method, load X vents the air into atmosphere continuously. The pressure
regulator restricts the air flow to the load, thus controlling the air pressure. In this type of
pressure regulation, some minimum flow is required to operate the regulator. If the load is a
dead end type which draws no air, the pressure in the receiver will rise to the manifold
pressure. These type of regulators are called as ‘non-relieving regulators’, since the air must
pass through the load.
− In the second type, load Y is a dead end load. However the regulator vents the air into
atmosphere to reduce the pressure. This type of regulator is called as ‘relieving regulator’.
− The third type of regulator has a very large load Z. Therefore its requirement of air volume
is very high and can’t be fulfilled by using a simple regulator. In such cases, a control loop
comprising of pressure transducer, controller and vent valve is used. Due to large load the
system pressure may rise above its critical value. It is detected by a transducer. Then the
signal will be processed by the controller which will direct the valve to be opened to vent out
the air. This technique can be also be used when it is difficult to mount the pressure
regulating valve close to the point where pressure regulation is needed.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.18
Figure 6.14 - Types of pressure regulation
6.7 VALVES
Valve are defined as devices to control or regulate the commencement, termination and
direction and also the pressure or rate of flow of a fluid under pressure which is delivered by
a compressor or vacuum pump or is stored in a vessel.
Values of one sort or another, perform three main function in pneumatic installation
− They control the supply of air to power units, example cylinders
− They provide signal which govern the sequence of operation
− They act as interlock and safety devices
− The type of valve used is of little importance in a pneumatic control for most part. What is
important is the function that can be initiated with the valves, its mode of actuation and line
connection size, the last named characteristics also determining the flow size of the valve.
− Valves used in pneumatics mainly have a control function that is when they act on some
process, operation or quantity to be stopped. A control function requires control energy, it
being desirable to achieve the greatest possible effect with the least effort. The form of
control energy will be dictated by the valve’s mode of actuation and may be manual,
mechanical, electrical hydraulic or pneumatic.
− Valve available for pneumatic control can be classified into four principal groups according
to their function:
1. Direction control valve (Same as used in hydraulics. Range of working pressure is less)
2. Non return valves
3. Flow control valves (Same as used in hydraulics. Range of working pressure is less)
4. Pressure control valves (Same as used in hydraulics. Range of working pressure is less)

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.19
Non return valves
− Non return valves permit flow of air in one direction only, the other direction through the
valve being at all times blocked to the air flow. Mostly the valves are designed so that the
check is additionally loaded by the downstream air pressure, thus supporting the non-return
action.
− Among the various types of non-return valves available, those preferentially employed in
pneumatic controls are as follows
A) Check valve
B) Shuttle valve
C) Restrictor check valve
D) Quick exhaust valve
E) Two pressure valve
A. Check valve
− The simplest type of non-return valve is the check valve (Figure 6.15) which completely
blocks air flow in one direction while permitting flow in the opposite direction with minimum
pressure loss across the valve.
− As soon as the inlet pressure in the direction of free flow develops a force greater than that
of the internal spring, the check is lifted clear of the valve seat. The check in such valve may
be plug, ball, plate or diaphragm.
Figure 6.15 - Check valve
B. Shuttle valve
− It is also known as a double control valve or double check valve. A shuttle valve has two
inlets and one outlet. At any one time, flow is shut off in the direction of whichever inlet is
unloaded and is open from the loaded inlet to the outlet (Figure 6.16).
− A shuttle valve may be installed, for example, when a power unit (cylinder) or control unit
(valve) is to be actuated from two points, which may be remote from one other.

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.20
Figure 6.16 - Pneumatic Shuttle valve
C. Quick Exhaust Valves
− A quick exhaust valve is a typical shuttle valve. The quick exhaust valve is used to exhaust
the cylinder air quickly to atmosphere. Schematic diagram of quick exhaust valve is shown in
Figure 6.17. In many applications especially with single acting cylinders, it is a common
practice to increase the piston speed during retraction of the cylinder to save the cycle time.
− The higher speed of the piston is possible by reducing the resistance to flow of the
exhausting air during the motion of cylinder. The resistance can be reduced by expelling the
exhausting air to the atmosphere quickly by using Quick exhaust valve.
− The construction and operation of a quick exhaust valve is shown in Figure 6.17. It consist
of a movable disc (also called flexible ring) and three ports namely, Supply port 1, which is
connected to the output of the final control element (Directional control valve). The Output
port, 2 of this valve is directly fitted on to the working port of cylinder. The exhaust port, 3 is
left open to the atmosphere
Figure 6.17 - Functional diagram of quick exhaust valve
Forward Motion: During forward movement of piston, compressed air is directly admitted
behind the piston through ports 1 and 2 Port 3 is closed due to the supply pressure acting on
the diaphragm. Port 3 is usually provided with a silencer to minimise the noise due to
exhaust.
Return Motion: During return movement of piston, exhaust air from cylinder is directly
exhausted to atmosphere through opening 3 (usually larger and fitted with silencer) .Port 2 is

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.21
sealed by the diaphragm. Thus exhaust air is not required to pass through long and narrow
passages in the working line and final control valve
D. Two Pressure Valve
− This valve is the pneumatic AND valve. It is also derivate of Non Return Valve. A two
pressure valve requires two pressurised inputs to allow an output from itself. The cross
sectional views of two pressure valve in two positions are given in Figure 6.18.
− As shown in the figure, this valve has two inputs 12 and 14 and one output 2. If the
compressed air is applied to either 12 or input 14, the spool moves to block the flow, and no
signal appears at output 2. If signals are applied to both the inputs 12 and 14, the compressed
air flows through the valve, and the signal appears at output 2.
Figure 6.18 - Two pressure valve

Oil Hydraulics and Pneumatics (2171912) 6. Introduction to Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 6.22

Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.1
7 PNEUMATIC CIRCUITS
Course Contents
7.1 Introduction
7.2 Single acting cylinder control
7.3 Double acting cylinder control
7.4 Supply air throttling and
exhaust air throttling
7.5 Time dependent controls
7.6 Single actuator circuit versus
multi actuator circuits

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.2
7.1 INTRODUCTION
Pneumatic control systems can be designed in the form of pneumatic circuits. A pneumatic
circuit is formed by various pneumatic components, such as cylinders, directional control
valves, flow control valves, pressure regulator, signal processing elements such as shuttle
valve, two pressure valve etc. Pneumatic circuits have the following functions
To control the entry and exit of compressed air in the cylinders.
To use one valve to control another valve
To control actuators or any other pneumatic devices
− A pneumatic circuit diagram uses pneumatic symbols to describe its design. Some basic
rules must be followed when drawing pneumatic diagrams.
− To be able to design pneumatic circuits, it is better for one to have basic knowledge on the
designing simple pneumatic circuits. With this foundation, one would be able to move on to
the designing more complicated circuits involving many more cylinders.
7.2 SINGLE ACTING CYLINDER CONTROL
7.2.1 Direct control of single acting cylinder
Figure 7.1 - Direct control of a single acting cylinder
− Pneumatic cylinders can be directly controlled by actuation of final directional control valve
(Figure 7.1). These valves can be controlled manually or electrically. This circuit can be used
for small cylinders as well as cylinders which operates at low speeds where the flow rate
requirements are less.
− When the directional control valve is actuated by push button, the valve switches over to the
open position, communicating working source to the cylinder volume. This results in the
forward motion of the piston. When the push button is released, the reset spring of the valve
restores the valve to the initial position [closed].

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.3
− The cylinder space is connected to exhaust port there by piston retracts either due to spring
or supply pressure applied from the other port.
Example 1: A small single acting cylinder is to extend and clamp a work piece when a push
button is pressed. As long as the push button is activated, the cylinder should remain in the
clamped position. If the push button is released, the clamp is to retract. Use additional start
button. Schematic diagram of the setup is shown in Figure 7.2
Figure 7.2
Solution
The control valve used for the single acting cylinder is the 3/2 way valve. In this case, since
the cylinder is of small capacity, the operation can be directly controlled by a push button 3/2
way directional control valve with spring return.
Figure 7.3
When start button and 3/2 NC valve is operated, cylinder moves forward to clamp the work
piece. When start button and 3/2 way valve is released cylinder comes back to the retracted
position as shown in Figure 7.3.

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.4
7.2.2 Indirect control of single acting cylinder
− This type of circuit (Figure 7.4) is suitable for large single cylinders as well as cylinders
operating at high speeds. The final pilot control valve is actuated by normally closed 3/2 push
button operated valve. The final control valves handle large quantity of air.
− When the push button is pressed, 3/2 normally closed valve generate a pilot signal 12 which
controls the final valve thereby connecting the working medium to piston side of the cylinder
so as to advance the cylinder.
− When the push button is released, pilot air from final valve is vented to atmosphere through
3/2 NC – DCV.
Figure 7.4 - Indirect control of a single acting cylinder
− The signal pressure required can be around 1-1.5 bar. The working pressure passing through
the final control valve depends on the force requirement which will be around 4-6 bar.
− Indirect control as permits processing of input signals. Single piloted valves are rarely used
in applications where the piston has to retract immediately on taking out the set pilot signal.
Example 2: A large single acting cylinder is to extend and clamp a work piece when a push
button is pressed. As long as the push button is activated, the cylinder should remain in the
clamped position. If the push button is released, the clamp is to retract. Use additional start
button.
The control valve used for the single acting cylinder is the 3/2 way valve. In this case, since
the cylinder is of large capacity, the operation cannot be directly controlled by a push button
3/2 way directional control valve with spring return. Indirect control is to be used as shown in
the Figure 7.5
Valve 2 is a small capacity valve which controls the large capacity valve 3. When the valve 2
is unactuated the cylinder is in the retracted condition. When the valve 2 is actuated the
cylinder is in the extended position to clamp the work piece.

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.5
Figure 7.5 - Indirect control of single acting cylinder
7.2.3 Control of single acting cylinder using “or” valve (Shuttle valve)
− Shuttle valve is also known as double control valve or double check valve. A shuttle valve
has two inlets and one outlet (Figure 7.6). At any one time, flow is shut off in the direction of
whichever inlet is unloaded and is open from the loaded inlet to the outlet. This valve is also
called an OR valve.
− A shuttle valve may be installed for example, when the cylinder or valve is to be actuated
from two points, which may be remote from one another.
Figure 7.6 - Shuttle valve (OR valve)
− The single acting cylinder in Figure 7.7 can be operated by two different circuits. Examples
include manual operation and relying on automatic circuit signals, that is, when either control

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.6
valve 1 or control valve 2 is operated, the cylinder will work. Therefore, the circuit in Figure
7.7 possesses the OR function.
Figure 7.7 - Control of a single acting cylinder using OR valve
7.2.4 Control of single acting cylinder using “and” valve (Non Return Valve)
− This valve is the pneumatic AND valve. It is also derivate of Non Return Valve. A two
pressure valve requires two pressurised inputs to allow an output from itself. The cross
sectional views of two pressure valve in two positions are given in Figure 7.8.
− As shown in the Figure 7.8, this valve has two inputs 12 and 14 and one output 2. If the
compressed air is applied to either 12 or input 14, the spool moves to block the flow, and no
signal appears at output 2. If signals are applied to both the inputs 12 and 14, the compressed
air flows through the valve, and the signal appears at output 2.
Figure 7.8 - control of a single acting cylinder using OR valve
7.2.5 Control of single acting cylinder using “Not” valve
− Another name for a NOT function is inverse control. In order to hold or lock an operating
conveyor or a similar machine, the cylinder must be locked until a signal for cancelling the
lock is received. Therefore, the signal for cancelling the lock should be operated by a
normally open type control valve.
− However, to cancel the lock, the same signal must also cancel the locks on other devices,
like the indication signal . Figure 7.9 shows how the normally closed type control valve
can be used to cut off the normally open type control valve and achieve the goal of
changing the signal.

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.7
Figure 7.9 - Control of a single acting cylinder using NOT valve
7.3 DOUBLE ACTING CYLINDER CONROL
7.3.1 Direct control of double acting cylinder
− The only difference between a single acting cylinder and a double acting cylinder is that a
double acting cylinder uses a 5/2 directional control valve instead of a 3/2 directional control
valve (Figure 7.10).
− Usually, when a double acting cylinder is not operated, outlet ‘B’ and inlet ‘P’ will be
connected. In this circuit, whenever the operation button is pushed manually, the double
acting cylinder will move back and forth once.
Figure 7.10 - Direct control of a double acting cylinder
− In order to control the speed in both directions, flow control valves are connected to the
inlets on both sides of the cylinder. The direction of the flow control valve is opposite to that
of the release of air by the flow control valve of the single acting cylinder.
− Compared to the throttle inlet, the flow control valve is tougher and more stable.
Connecting the circuit in this way allows the input of sufficient air pressure and energy to
drive the piston.

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.8
Example 3: Pneumatic system is to be designed to operate a door of public transport
vehicles. (Figure 7.11). Assuming that the opening and closing of the doors are controlled by
two button switches ON and OFF. When the button switch ON is pressed, the door will open.
When the button switch OFF is pushed, the doors will close.
Figure 7.11 - Operation of pneumatic system that controls the door of vehicle
Solution.
Solution is given in Figure 7.12, which is self-explanatory
Figure 7.12 - Pneumatic circuit to control the door of vehicle
7.3.2 Indirect control of double acting cylinder using memory valve
− When the 3/2 way valve meant for Forward motion (Figure 7.13 b) is pressed, the 5/2
memory valve switches over through the signal applied to its pilot port 14. The piston travels
out and remains in the forward end position.
− Double piloted valve is also called as the Memory valve because now even if this push
button meant Forward is released the final 5/2 control valve remains in the actuated status as

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.9
the both the pilot ports of 5/2 valves are exposed to the atmosphere pressure and the piston
remains in the forward end position.
Figure 7.13 - Indirect control of Double acting cylinder using memory valve
− When the 3/2 way valve meant for return motion (Figure 7.13 a) is pressed, the 5/2 way
valve switches back to initial position through the signal applied to its pilot port 12. The
piston then returns to its initial position and remains in the rear end position. Now even if the
Return push button is released the status of the cylinder will not change.
− The circuit is called a memory circuit because it uses a 5/2 way double pilot memory valve.
5/2 way valve can remember the last signal applied in terms of the position of the spool in the
absence of reset springs, thus memorizing or storing the pneumatic signal. Double piloted 4/2
way valve also can be used as memory valve.
7.4 SUPPLY AIR THROTTLING AND EXHAUST AIR THROTTLING
− It is always necessary to reduce the speed of cylinder from maximum speed based on
selected size of final control valve to the nominal speed depending on the application.
− Speed control of Pneumatic Cylinders can be conveniently achieved by regulating the flow
rate supply or exhaust air.
− The volume flow rate of air can be controlled by using flow control valves which can be
either two way flow control valve or one way flow control valve
− There are two types of throttling circuits for double acting cylinders:
i) Supply air throttling
ii) Exhaust air throttling
7.4.1 Supply air throttling.
− This method of speed control of double acting cylinders is also called meter –in circuit
(Figure 7.14 a).For supply air throttling, one way flow control valves are installed so that air
entering the cylinder is throttled.

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.10
− The exhaust air can escape freely through the check valve of the throttle valve on the outlet
side of the cylinder. There is no air cushion on the exhaust side of the cylinder piston with
this throttling arrangement. As a result, considerable differences in stroking velocity may be
obtained even with very small variations of load on the piston rod.
− Any load in the direction of operating motion will accelerate the piston above the set
velocity. Therefore supply air throttling can be used for single acting and small volume
cylinders.
Figure 7.14 - Throttling Circuits
7.4.2 Exhaust air throttling.
− This method of speed control of double acting cylinders is also called meter-out (Figure
7.14 b). In exhaust air throttling throttle relief valves are installed between the cylinder and
the main valve in such a way that the exhaust air leaving the cylinder is throttled in both
directions of the motion of the cylinder.
− The supply air can pass freely through the corresponding check valves in each case. In this
case, the piston is loaded between two cushions of air while the cylinder is in motion and
hence a smooth motion of the cylinder can be obtained.
− The first cushion effect is due to supply air entering the cylinder through check valve, and
second cushion effect is due to the exhaust air leaving the cylinder through the throttle valve
at a slower rate. Therefore, exhaust air throttling is practically used for the speed control of
double acting cylinders.
− Arranging throttle valves in this way contributes substantially to the improvement of feed
behaviour.

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.11
7.5 TIME DEPENDENT CONTROLS
− Pneumatic timers are used to create time delay of signals in pilot operated circuits.
Available as normally closed timers and normally open timers. Usually pneumatic timers are
on delay timers.
− Delay of signals is very commonly experienced in applications such as bonding of two
pieces. Normally open pneumatic timers are also used in signal elimination. Normally open
pneumatic timers are used as safety device in two hand blocks
− Time delay valve is a combination of a pneumatically actuated 3/2 direction control valve,
an air reservoir and a throttle relief valve.
− The time delay function is obtained by controlling the air flow rate to or from the reservoir
by using the throttle valve. Adjustment of throttle valve permits fine control of time delay
between minimum and maximum times.
− In pneumatic time delay valves, typical time delays in the range 5-30 seconds are possible.
The time delay can be extended with the addition of external reservoir.
Pneumatic timer can be classified as
1. On –delay timer
2. Off – delay timer
− In on-delay timer, the 3/2 DCV is actuated after a delay with reference to the application of
pilot signal and is rest immediately on the application of the pilot signal. In off delay timer,
the 3/2 DCV is actuated immediately on the application of the pilot signal and is reset only
after a delay with reference to the release of the pilot signal.
− Pneumatic timers can also be classified according to type of pneumatically actuated 3/2
DCV as:
1) Time delay valve, NC type
2) Time delay valve, NO type.
Time delay valve, NC type. The constructions of an on-delay timer (NC) type in the normal
and actuated are shown in Figure 7.15 It can be seen that 3/2 DCV operates in the on delay
mode permanently. But, in some designs, the valve can be operated in the off-delay mode by
connecting the check valve in reverse direction. For this purpose, the ports of the throttle
check valve should be brought out.
Time delay valve, NO type. The construction and function of an on-delay timer (NO) type is
similar to that of an on-delay timer (NC) type except for the type of 3/2 DCV valve. In the
on-delay valve (NO) type, a 3/2 DCV (NO) type is used whereas in the on-delay timer (NC)
type, a 3/2 DCV (NC) type is used.

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.12
Figure 7.15
Example 4: A double acting cylinder is used to press together glued components. Upon
operation of a press button, the clamping cylinder slowly advances. Once the fully extended
position is reached, the cylinder is to remain for a time of t = 6 seconds and then immediately
retract to the initial position. A new start cycle is only possible after the cylinder has fully
retracted and after a delay of 5 seconds. During this delay the finished part is manually
removed and replaced with new parts for gluing. The retracting speed should be fast, but
adjustable.
Figure 7.16

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.13
− If the push button S1 is actuated for a sufficiently long time period (t = 5 second) then the
air reservoir of time delay valve V1 is filled and corresponding 3/2 valve is switched,
following which a signal is applied at input 1 of the dual pressure valve V2.
− If the push button S1 is actuated, the AND condition at the dual pressure valve is met. A
signal is applied at the control port 12 of the control element V4. The valve V4 switches,
pressure is applied to the piston side of the cylinder 1A and the piston rod advances. After as
short advancing distances, the limit switch S2 is released, pressure is reduced in the air
reservoir of the time delay valve V1 via the roller lever valve S2, and the integrated 3/2 way
valve switches back to its initial position. The AND condition at the dual pressure valve is
now no longer met. Actuation of the push button S1 becomes ineffective.
− Upon reaching the advancing position, the piston rod actuates the roller lever S3. The
pressure line to the time delay valve V3 is now released and pressure in the air reservoir is
increased. The rate of pressure increase is adjustable via the integrated flow control valve.
When the switching pressure has been reached, the integrated 3/2 way valve switches and a
signal is applied at the control port 12 of the final control element V4. The valve V4 reverses
and the piston rod retracts. Upon release of the limit switch S3, the time delay valve V3
Switches to its initial position again.
− The limit switch S2 is actuated, when the piston rod reaches its initial position, the pressure
in the air reservoir of the time delay V1 starts to increase until the switching pressure has
been reached after t = 5 seconds. The integrated 3/2 way valve switches. The initial status of
the system is now reached again and a new cycle can be started. The piston rod speed is set at
the restrictors of the one way flow control valves V5 and V6.
7.6 SINGLE ACTUATOR CIRCUIT VERSUS MULTI ACTUATOR CIRCUITS
− We have learnt about the various means and ways to control a single actuator circuits, both
for single acting and double acting cylinders. Implementation of logic gates along with use of
pressure sequence valve and time delay was systematically presented.
− Most of the practical pneumatic circuits use multi cylinders. They are operated in specific
sequence to carry out the desired task. For example, to drill a wooden component first we
need to clamp and then drill. We can only unclamp the cylinder, if and only if the drill is
withdrawn away from the work piece. Here sequencing of movement of clamp cylinders and
cylinder which carries the drill is important. This sequencing is carried out by actuation of
appropriate final control valves like directional control valves. The position of the cylinders is
sensed by the sensors like limit switches, roller or cam operated valves.
− Multi cylinder pneumatics circuits can be designed in various methods. There is no
universal circuit design method that suits all types of circuits. Some methods are commonly
used for compound circuits but would be too expensive for simple circuits. There are five
common methods used by engineering and they are given below
Classic method or Intuitive method
Cascade method
Step counter method

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.14
Karnaugh–veitch method
Combinational circuit design
7.6.1 Classic method or intuitive method
In intuitive method, circuit design is done by use of general knowledge of pneumatics
following the sequence through intuitively. In general, steps involves
Write down sequence and draw motion diagrams
Draw in cylinders and control valves
Complete circuits intuitively.
Coordinated and sequential motion control.
− In majority of the pneumatic applications more than one cylinder is used. The movement of
these cylinders are coordinated as per the required sequence. Sensors are used for confirming
the cylinder position and the resultant actuation of the final control element. Normally limit
switches are used.
− The activation of limit switches of different cylinders will provide set or reset signal to the
final control valves for further controlling the movement of various cylinders. The limit
switches have to be arranged in the proper location with the help of motion diagram
Demonstration of Classic method
− In order to develop control circuitry for multi cylinder applications, it is necessary to draw
the motion diagram to understand the sequence of actuation of various signal input switches-
limit switches and sensors.
− Motion diagram represents status of cylinder position -whether extended or retracted in a
particular step.
Example 1: In a press shop, stamping operation to be performed using a stamping machine.
Before stamping, workpice has to be clamped under stamping station. Then stamping tool
comes and performs stamping operation. Work piece must be unclamped only after stamping
operation.
Step 1: Write the statement of the problem:
Let A be the clamping cylinder and B be the stamping cylinder as shown in the Figure xxx.
First cylinder A extends and brings under stamping station where cylinder B is located.
Cylinder B then extends and stamps the job. Cylinder A can return back only cylinder B has
retracted fully.
Step 2: Draw the positional layout. (Figure 7.17)
Step3: Represent the control task using notational form
Cylinder A advancing step is designated as A+
Cylinder A retracting step is designated as A-

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.15
Figure 7.17 - Positional layout
Cylinder B advancing step is designated as B+
Cylinder B retracting step is designated as B-
Therefore, given sequence for clamping and stamping is A+B+B-A-
Step 4: Draw the Displacement –step diagram (Figure 7.18)
Figure 7.18 - Displacement step diagram
Step 5: Draw the Displacement –time diagram (Figure 7.19)
Figure 7.19 - Displacement time diagram
Step 6: Analyse and Draw Pneumatic circuit.
Step 6.1 Analyse input and output signals.
Input Signals:

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.16
Cylinder A – Limit switch at home position ao
Limit switch at home position a1
Cylinder B - Limit switch at home position bo
Limit switch at home position b1
Output Signal:
Forward motion of cylinder A (A+)
Return motion of cylinder A (A-)
Forward motion of cylinder B (B+)
Return motion of cylinder B (B+)
Step 6.2 using the displacement time/step diagram link input signal and output signal. (Figure
7.20)
Usually start signal is also required along with a0 signal for obtaining A+ motion.
1. A+ action generates sensor signal a1, which is used for B+ motion
2. B+ action generates sensor signal b1, which is used for B- motion
3. B- action generates sensor signal b0, which is used for A- motion
4. A- action generates sensor signal a0, which is used for A+ motion
Above is shown below graphically.
Figure 7.20 - Input/output signal flow
Step 7: Draw the power circuit (Figure 7.21)
i) Draw the cylinders A(1.0) and B(2.0).
ii) Draw the DCVs 1.1 and 2.1 in unactuated conditions
iii) Mark the limit switch positions for cylinders A (1.0) and B (2.0).

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.17
Figure 7.21 - Power circuit diagram
Figure 7.22 - Control circuit diagram
Step 9: Analysis of pneumatic circuit
1. When the start button is pressed, the signal appears at port 14 of valve 1.1 through limit
switch signal a0.
2. Check for the presence of the signal at the other end (12) of valve 1.1. Notice that the
signal is also present at port 12 of valve 1.1. (Because bo is also pressed). This results in
signal conflict and valve 1.1 is unable to move. (Figure 7.23).
3. Let us assume for time being, bo is somehow disengaged so that valve 1.1 can switch over
and consequently cylinder A can extend. When the start button is pressed. (Figure 7.24)
4. When cylinder A fully extends, it generates a limit switch signal a1, which is applied to
port 14 of the valve 2.1.
5. Check for the presence of the signal at the other end (12) of valve 2.1. Signal is not present
at port 12 of valve 2.1 and hence there is no signal conflict

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.18
Figure 7.23 - Signal conflict at valve 1.1
Figure 7.24 - Pneumatic circuit after cylinders A and B are extended
6. Signal applied to port 14 of the valve 2.1 causes the shifting of DCV 2.1 and cylinder B
extends.
7. When cylinder B fully extends, it generates a limit switch signal b1, which is applied to
port 12 of valve 2.1
1. Check for the presence of the signal at the other end of 14 of valve 2.1. It can be seen that
signal is also present at the port 14 of valve 2.1(because a1 is also pressed). This results in
signal conflict and valve 2.1 is unable to move (Figure 7.25)

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.19
Figure 7.25 - Signal conflict at valve 2.1
9. Let us assume for time being, b1 is somehow disengaged so that valve 2.1 can switch over
and consequently cylinder B can retract. (Figure 7.26)
Figure 7.26 - Position when cylinder B is reversing (B -)
10. When the cylinder B is fully retracted, it generates a limit switch signal b0, which is
applied to port 12 of the valve 1.1. (Figure 7.27)
11. Check for the signal at the other end 14 of the valve 1.1 Notice that signal is not present at
port 14 of the valve 1.1 and hence there is no signal conflict. So valve 1.1 can switch over
and Cylinder A can retract.

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.20
Figure 7.27 - Position when cylinder A has retracted fully (A-)
7.6.2 Cascade method
− A Bi-stable memory valve or reversing valve can be used to eliminate signal conflicts.
Signal conflict is avoided by allowing the signal to be effective only at times when they are
needed. Two of the possible designs are possible.
i) Cascade method
ii) Shift register method
Demonstration of Cascade method
− In order to develop control circuitry for multi cylinder applications, as done before in
classic method, it is necessary to draw the motion diagram to understand the sequence of
actuation of various signal input switches-limit switches and sensors.
− Motion diagram represents status of cylinder position -whether extended or retracted in a
particular step.
Step 1: Write the statement of the problem:
First cylinder A extends and brings under stamping station where cylinder B is located.
Cylinder B then extends and stamps the job. Cylinder A can return back only cylinder B has
retracted fully.
Step 2: Draw the positional layout. (Figure 7.28)
Step3: Represent the control task using notational form
Cylinder A advancing step is designated as A+
Cylinder A retracting step is designated as A-
Cylinder B advancing step is designated as B+
Cylinder B retracting step is designated as B-
Given sequence for clamping and stamping is A+B+B-A-

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.21
Figure 7.28 - Positional diagram
Step 4: Draw the Displacement –step diagram (Figure 7.29)
Figure 7.29 - Displacement step diagram
Step 5: Draw the Displacement –time diagram (Figure 7.30)
Figure 7.30 - Displacement time diagram
Step 6: Analyse and Draw Pneumatic circuit.
Step 6.1 Analyse input and output signals.
Input Signals
Cylinder A – Limit switch at home position ao
Limit switch at home position a1

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.22
Cylinder B - Limit switch at home position bo
Limit switch at home position b1
Output Signal
Forward motion of cylinder A (A+)
Return motion of cylinder A (A-)
Forward motion of cylinder B (B+)
Return motion of cylinder B (B+)
Step 6.2: Using the displacement time/step diagram link input signal and output signal.
(Figure 7.31)
Usually start signal is also required along with a0 signal for obtaining A+ motion.
1. A+ action generates sensor signal a1, which is used for B+ motion
2. B+ action generates sensor signal b1, which is used group changing.
3. B- action generates sensor signal b0, which is used for A- motion
4. A- action generates sensor signal a0, which is used for group changing
Above information is shown below graphically.
Figure 7.31 - Displacement time diagram
Step 7: Draw the power circuit (Figure 7.32)
i) Divide the given circuits into groups. Grouping should be done such that there is no
signal conflict. Do not put A+ and A- in the same group. Similarly B+ and B- should
not be put in the same group. In other word A+ and A- should belong to different
group to avoid signal conflict.
In our example of A+ B+ B- A- we can group as

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.23
A+ B+ B- A-
Group 1 Group 2
ii) Choose the number of group changing valve = no of groups -1
In our example, we have 2 groups so we need one group changing valve
Connect the group changing valve as follows. From the figure it is clear that when the control
signals I and II are applied to group changing valve, the air (power) supply changes from
Group 1(G1) to Group 2 (G2).
Figure 7.32 - Power circuit
iii) Arrange the limit switch and start button as given below (Figure 7.33)
Figure 7.33 – Arrangement of limit switches
iv) Draw the power circuit (Figure 7.34)
Figure 7.34 - Power circuit

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.24
Step 8 Draw the control circuit (Figure 7.35)
Figure 7.35 - Pneumatic circuits for A+ B+ B- A-
Step 9: Analysis of pneumatic circuit
1. Assume that air is available in the line G2 to start with. (Say from last operation)
2. When the start button is pressed, Air supply from Group G2 is directed to line 2 through
actuated limit switch a0. Now the air available in line 2, actuates the Group changing valve
(GCV) to switch over to position I. This switching of the GCV causes air supply to change
from G2 to G1.
3. Now the air is available in line G1. The air supply from group G1 is directed to port 14 of
the valve 1.1. As there is no possibility of signal conflict here, valve 1.1 switches over
causing the A+ action.
4. Sensor a1 is actuated as the result of A+ action, allowing the air supply from the Group G1
to reach to line 1 through a1. Now the air available reaches port 14 of valve 2.1. As there is
no possibility of signal conflict here, valve 2.1 switches over, causing B+ action
automatically.
5. Sensor b1 is actuated as result of B+ action, allowing the air supply in line 3. Air from line
3 allows the air to reach port 12 of Group changing valve (also called reversing valve). As a

Oil Hydraulics and Pneumatics (2171912) 7. Pneumatic Circuits
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 7.25
result, the Group changing valve switches over, causing the group supply to change from G1
to G2.
6. Now the air is available in G2. Air from G2 acts on port 12 of the Valve 2.1. As there is no
possibility of signal conflict here, valve 2.1 switches over, causing B- action automatically.
7. Sensor is actuated as the result of B- action. Now the air is available in line 4.Air from line
4 reach port 12 of the valve 1.1, as there is no possibility of signal conflict here, valve 2.1
switches over, causing A- action automatically.
The cascade system provides a straightforward method of designing any sequential circuit.
Following are the important points to note:
a) Present – the system must be set to the last group for start-up
b) Pressure drop- Because the air supply is cascaded, a large circuit can suffer from
more pressure drop.
c) Cost – Costly due to additional reversing valves and other hardware


Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 8.1
8 INTRODUCTION TO AUTOMATION IN HYDRAULIC AND PNEUMATIC SYSTEM
Course Contents
8.1 Introduction
8.2 Types of automation in the
industry
8.3 Advantages and disadvantages
of automation control in industry

Oil Hydraulics and Pneumatics (2171912) 8. Introduction to Pneumatic System Automation in Hydraulic and Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 8.2
8.1 INTRODUCTION
- In today’s fast-moving, highly competitive industrial world, a company must be flexible,
cost -effective and efficient if it wishes to survive. In the process and manufacturing
industries, this has resulted in a great demand for industrial control systems/ automation in
order to stream-line operations in terms of speed, reliability and product output. Automation
plays an increasingly important role in the world economy and in daily experience.
- Automation is the use of control systems and information technologies to reduce the need
for human work in the production of goods and services. In the scope of industrialization,
automation is a step beyond mechanization. Whereas mechanization provided human
operators with machinery to assist them with the muscular requirements of work, automation
greatly decreases the need for human sensory and mental requirements as well.
8.1.1 What is automation control system?
- Automation Control System - system that is able to control a process with minimal human
assistance or without manual and have the ability to initiate, adjust, action show or measures
the variables in the process and stop the process in order to obtain the desired output.
- The main objective of Automation Control System used in the industry are:
1. To increase productivity
2. To improve quality of the product
3. Control production cost
8.2 TYPES OF AUTOMATION IN THE INDUSTRY
Classification of automation
a) Permanent/Fixed Automation
- This control system is designed to perform a specific task
- Functions of control circuit is fixed and permanent.
- It will be complicated if we want to do other task apart from the existing task
b) Programmable /Flexible Automation
- Programmable automation or flexible automation is a complex control
system that can perform several tasks
- Functions of control circuit programmed by the user and can be modified.
- When the task to be performed by machines changed, changes only need to
be done by making modifications to the machine control program.

Oil Hydraulics and Pneumatics (2171912) 8. Introduction to Pneumatic System Automation in Hydraulic and Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 8.3
8.2.1 Comparison between fixed and flexible automation system
FIXED
AUTOMATION
FLEXIBLE
AUTOMATION
Purpose Specific Variety
Ease of making changes / upgrade Difficult Easy
Maintenance Hard Easy
Capability
Depends on
manufacturing and
design
Very high
Speed Slow Fast
Economy efficiency
Suitable for small
system
Suitable for
all types of systems
Example:
Fixed automation
Figure 8.1 – Fixed automation
Programmed automation
- There are three types of the control system based on supply
a) Pneumatic control systems
b) Hydraulic control system
c) Electrical control system
a) Pneumatic control system
- Pneumatic control system is a system that uses compressed air to produce power / energy to
perform any task
- Pneumatic systems found in many industrial systems such as food industry, petrochemical
and industrial involves robotics.

Oil Hydraulics and Pneumatics (2171912) 8. Introduction to Pneumatic System Automation in Hydraulic and Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 8.4
Figure 8.2 – Programmed automation
- Pneumatic systems requires:
i. Compressed air supply
ii. Control valve
iii. Connecting tube
iv. Transducer
- Pneumatic control system can be controlled manually and automatically.
Figure 8.3 - Basic Block Diagram of Pneumatic Control System using manual/PLC
b) Hydraulic control system
- Hydraulic control system is a system that uses fluid to generate power/energy.
- The hydraulic system used in the automobile industry such as power systems, braking
systems, cranes, car jack, satellite and others.
- The fluid used is oil.
- The hydraulic system requires:

Oil Hydraulics and Pneumatics (2171912) 8. Introduction to Pneumatic System Automation in Hydraulic and Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 8.5
a) Hydraulic fluid supply
b) Control Valve
c) Cylinder
- Hydraulic control system can be controlled manually and automatically
Figure 8.4 - Basic block diagram of an automatic hydraulic control system by Manual /PLC
c) Electrical control system
- A control system that uses an electric current; either direct current (DC) or current shuttle
(AC) as a source of supply.
- Electrical control systems generally requires:
a) Electricity (DC) or (AC)
b) Input elements (switches, sensors, transducer, valves, electronic components, etc.)
c) Output elements (motor, lights, etc.)
d) Extension cable
Figure 8.5 - Basic block diagrams of electrical control system using PLC
8.2.2 Comparison between pneumatic control systems, hydraulic control system and
electric control system
i. Pneumatic control system
a) Easy installation
b) Simple design
c) Use compressed air as a supply source to perform task.

Oil Hydraulics and Pneumatics (2171912) 8. Introduction to Pneumatic System Automation in Hydraulic and Pneumatic System
Department of Mechanical Engineering Prepared By: Jainik Makwana Darshan Institute of Engineering & Technology, Rajkot Page 8.6
ii. Hydraulic control system
a) Complex to assemble
b) Use fluid like oil as a supply source to perform task.
c) Potential leakage will lead to pollution.
iii. Electric control system
a) Simple system
b) Use electricity as a supply source to perform task.
c) Widely use either for home user or in industrial.
8.3 ADVANTAGES AND DISADVANTAGES OF AUTOMATION CONTROL IN
INDUSTRY
The main advantages of automation are:
- Replacing human operators in tasks that involve hard physical work.
- Replacing humans in tasks done in dangerous environments (i.e. fire, space, volcanoes,
nuclear facilities, underwater, etc.)
- Performing tasks that are beyond human capabilities of size, weight, speed, endurance, etc.
- Economy improvement: Automation may improve in economy of enterprises, society or
most of humanity. For example, when an enterprise invests in automation, technology
recovers its investment; or when a state or country increases its income due to automation
like Germany or Japan in the 20th Century.
- Reduces operation time and work handling time significantly.
The main disadvantages of automation are:
- Unemployment rate increases due to machines replacing humans and putting those humans
out of their jobs.
- Technical Limitation: Current technology is unable to automate all the desired tasks.
- Security Threats/Vulnerability: An automated system may have limited level of intelligence,
hence it is most likely susceptible to commit error.
- Unpredictable development costs: The research and development cost of automating a
process may exceed the cost saved by the automation itself.
- High initial cost: The automation of a new product or plant requires a huge initial
investment in comparison with the unit cost of the product, although the cost of automation is
spread in many product batches of things