Embed Size (px)
Citation preview
1
U.D. 1Scelta ed inseguimento della traiettoria
20.2MisurarelecoordinategeografichediunpuntosullacartaSui lati delle carte nautiche sono riportate le scale di latitudine e longitudine con re-lativi valori numerici.
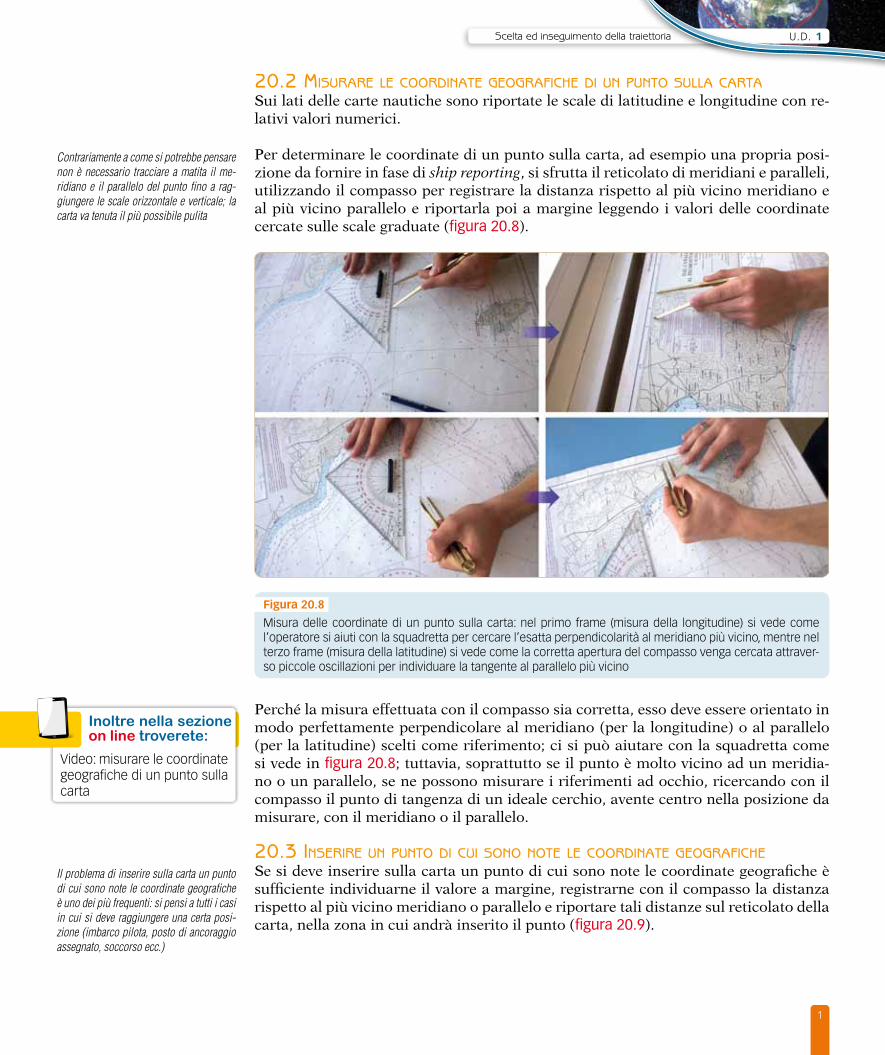
Per determinare le coordinate di un punto sulla carta, ad esempio una propria posi-zione da fornire in fase di ship reporting, si sfrutta il reticolato di meridiani e paralleli, utilizzando il compasso per registrare la distanza rispetto al più vicino meridiano e al più vicino parallelo e riportarla poi a margine leggendo i valori delle coordinate cercate sulle scale graduate (figura 20.8).
Figura 20.8
Misura delle coordinate di un punto sulla carta: nel primo frame (misura della longitudine) si vede come l’operatore si aiuti con la squadretta per cercare l’esatta perpendicolarità al meridiano più vicino, mentre nel terzo frame (misura della latitudine) si vede come la corretta apertura del compasso venga cercata attraver-so piccole oscillazioni per individuare la tangente al parallelo più vicino
Perché la misura effettuata con il compasso sia corretta, esso deve essere orientato in modo perfettamente perpendicolare al meridiano (per la longitudine) o al parallelo (per la latitudine) scelti come riferimento; ci si può aiutare con la squadretta come si vede in figura 20.8; tuttavia, soprattutto se il punto è molto vicino ad un meridia-no o un parallelo, se ne possono misurare i riferimenti ad occhio, ricercando con il compasso il punto di tangenza di un ideale cerchio, avente centro nella posizione da misurare, con il meridiano o il parallelo.
20.3inserireunpuntodicuisononotelecoordinategeograficheSe si deve inserire sulla carta un punto di cui sono note le coordinate geografiche è sufficiente individuarne il valore a margine, registrarne con il compasso la distanza rispetto al più vicino meridiano o parallelo e riportare tali distanze sul reticolato della carta, nella zona in cui andrà inserito il punto (figura 20.9).
Contrariamente a come si potrebbe pensare non è necessario tracciare a matita il me-ridiano e il parallelo del punto fino a rag-giungere le scale orizzontale e verticale; la carta va tenuta il più possibile pulita
Video: misurare le coordinate geografiche di un punto sulla carta
Inoltre nella sezione on line troverete:
Il problema di inserire sulla carta un punto di cui sono note le coordinate geografiche è uno dei più frequenti: si pensi a tutti i casi in cui si deve raggiungere una certa posi-zione (imbarco pilota, posto di ancoraggio assegnato, soccorso ecc.)
2
MoDUlo 1 Navigazione stimata
Figura 20.9
Diversi step per l’inserimento di un punto sulla carta: lo strumento preposto è il compasso, ma anche in que-sto caso l’operatore si avvale dell’uso della squadretta nautica per ricercare le perpendicolarità necessarie per evitare errori grossolani
Anche in questo caso il posizionamento preciso del punto si può effettuare avvalendo-si dell’uso delle squadrette nautiche per ricercare gli esatti parallelismi.
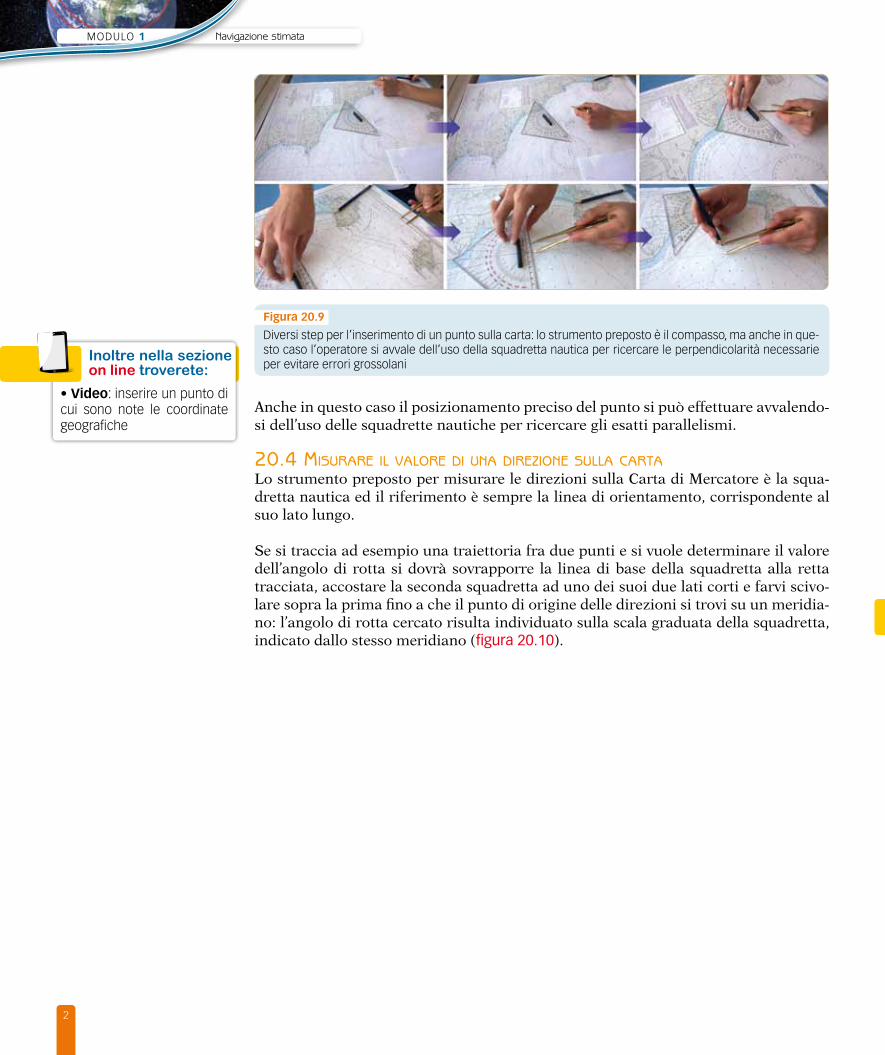
20.4MisurareilvalorediunadirezionesullacartaLo strumento preposto per misurare le direzioni sulla Carta di Mercatore è la squa-dretta nautica ed il riferimento è sempre la linea di orientamento, corrispondente al suo lato lungo.
Se si traccia ad esempio una traiettoria fra due punti e si vuole determinare il valore dell’angolo di rotta si dovrà sovrapporre la linea di base della squadretta alla retta tracciata, accostare la seconda squadretta ad uno dei suoi due lati corti e farvi scivo-lare sopra la prima fino a che il punto di origine delle direzioni si trovi su un meridia-no: l’angolo di rotta cercato risulta individuato sulla scala graduata della squadretta, indicato dallo stesso meridiano (figura 20.10).
• Video: inserire un punto di cui sono note le coordinate geografiche
Inoltre nella sezione on line troverete:
L’esempio fatto per l’angolo di rotta si presta ovviamente a qualsiasi tipo di direzione si debba misurare sulla carta, ad esempio i rilevamenti.
20.5tracciarerotteerilevaMentiPer tracciare rotte e rilevamenti, cioè direzioni di cui è noto in partenza il valore an-golare, il procedimento è l’inverso del precedente: si pone la squadretta sul meridiano più vicino alla zona in cui andrà disegnata la rotta o il rilevamento allineando accu-ratamente il punto di origine delle direzioni e il valore dato, quindi con la seconda squadretta si trasporta la prima nel punto esatto in cui deve avvenire il tracciamento (figura 20.11).
• Video: misurare il valore di una direzione sulla carta
Inoltre nella sezione on line troverete:
La posizione di partenza della squadretta è sempre con il lato lungo in alto e il vertice in basso
In molti casi quella che si traccia è la «rotta stimata» (che in assenza di specifici calcoli per contrastare vento o corrente coinciderà con la prora), in quanto la rotta propria-mente detta si definisce solo a posteriori in seguito al controllo della propria posizione e alla conseguente scoperta di eventuali di-sturbi intervenuti durante la condotta della navigazione

3
U.D. 1Scelta ed inseguimento della traiettoria
Figura 20.10
Diversi step per la misura di una direzione sulla carta di Mercatore: si allinea la linea di base della squadretta con la direzione da misurare (evidenziata in rosso), si affianca la seconda squadretta su un lato corto della prima che si fa poi scorrere per ricercare il meridiano più vicino (evidenziato in blu); quest’ultimo fornirà infine la lettura (in questo caso 128° o 308° a seconda del verso con cui si sta percorrendo la data direzio-ne). Si noti che la direzione da misurare taglia diversi meridiani, quindi si sarebbe potuto evitare il trasporto posizionando la squadretta direttamente in uno dei punti di intersezione
L’esempio fatto per l’angolo di rotta si presta ovviamente a qualsiasi tipo di direzione si debba misurare sulla carta, ad esempio i rilevamenti.
20.5tracciarerotteerilevaMentiPer tracciare rotte e rilevamenti, cioè direzioni di cui è noto in partenza il valore an-golare, il procedimento è l’inverso del precedente: si pone la squadretta sul meridiano più vicino alla zona in cui andrà disegnata la rotta o il rilevamento allineando accu-ratamente il punto di origine delle direzioni e il valore dato, quindi con la seconda squadretta si trasporta la prima nel punto esatto in cui deve avvenire il tracciamento (figura 20.11).
• Video: misurare il valore di una direzione sulla carta
Inoltre nella sezione on line troverete:
La posizione di partenza della squadretta è sempre con il lato lungo in alto e il vertice in basso
In molti casi quella che si traccia è la «rotta stimata» (che in assenza di specifici calcoli per contrastare vento o corrente coinciderà con la prora), in quanto la rotta propria-mente detta si definisce solo a posteriori in seguito al controllo della propria posizione e alla conseguente scoperta di eventuali di-sturbi intervenuti durante la condotta della navigazione
4
MoDUlo 1 Navigazione stimata
Figura 20.11
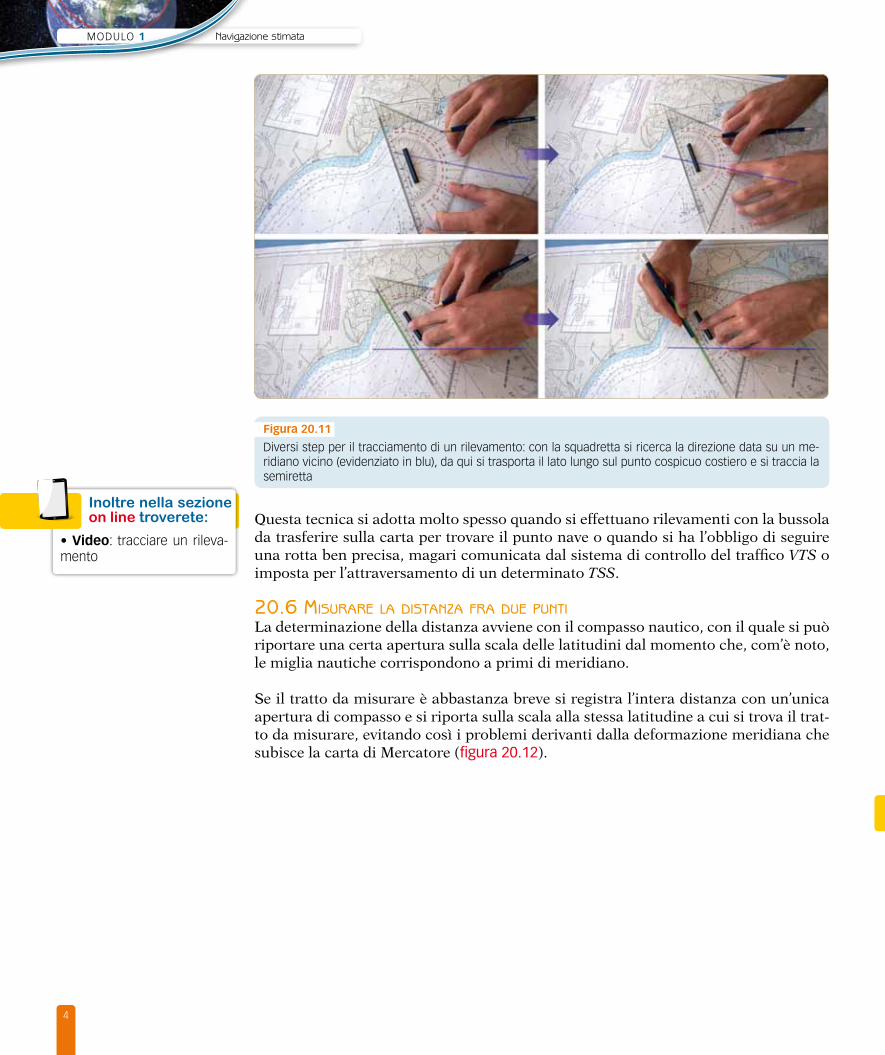
Diversi step per il tracciamento di un rilevamento: con la squadretta si ricerca la direzione data su un me-ridiano vicino (evidenziato in blu), da qui si trasporta il lato lungo sul punto cospicuo costiero e si traccia la semiretta
Questa tecnica si adotta molto spesso quando si effettuano rilevamenti con la bussola da trasferire sulla carta per trovare il punto nave o quando si ha l’obbligo di seguire una rotta ben precisa, magari comunicata dal sistema di controllo del traffico VTS o imposta per l’attraversamento di un determinato TSS.
20.6MisurareladistanzafraduepuntiLa determinazione della distanza avviene con il compasso nautico, con il quale si può riportare una certa apertura sulla scala delle latitudini dal momento che, com’è noto, le miglia nautiche corrispondono a primi di meridiano.
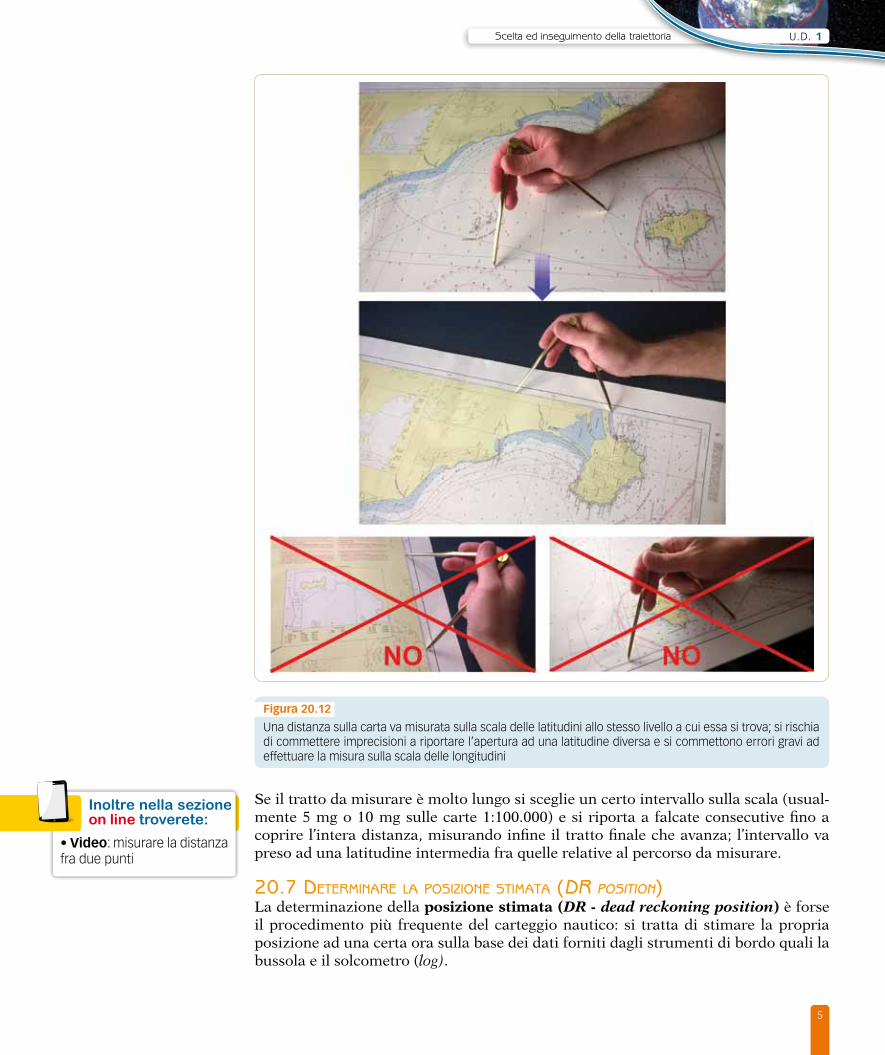
Se il tratto da misurare è abbastanza breve si registra l’intera distanza con un’unica apertura di compasso e si riporta sulla scala alla stessa latitudine a cui si trova il trat-to da misurare, evitando così i problemi derivanti dalla deformazione meridiana che subisce la carta di Mercatore (figura 20.12).
• Video: tracciare un rileva-mento
Inoltre nella sezione on line troverete:
Se il tratto da misurare è molto lungo si sceglie un certo intervallo sulla scala (usual-mente 5 mg o 10 mg sulle carte 1:100.000) e si riporta a falcate consecutive fino a coprire l’intera distanza, misurando infine il tratto finale che avanza; l’intervallo va preso ad una latitudine intermedia fra quelle relative al percorso da misurare.
20.7deterMinarelaposizionestiMata(DR position)La determinazione della posizione stimata (DR - dead reckoning position) è forse il procedimento più frequente del carteggio nautico: si tratta di stimare la propria posizione ad una certa ora sulla base dei dati forniti dagli strumenti di bordo quali la bussola e il solcometro (log).
• Video: misurare la distanza fra due punti
Inoltre nella sezione on line troverete:
5
U.D. 1Scelta ed inseguimento della traiettoria
Figura 20.12
Una distanza sulla carta va misurata sulla scala delle latitudini allo stesso livello a cui essa si trova; si rischia di commettere imprecisioni a riportare l’apertura ad una latitudine diversa e si commettono errori gravi ad effettuare la misura sulla scala delle longitudini
Se il tratto da misurare è molto lungo si sceglie un certo intervallo sulla scala (usual-mente 5 mg o 10 mg sulle carte 1:100.000) e si riporta a falcate consecutive fino a coprire l’intera distanza, misurando infine il tratto finale che avanza; l’intervallo va preso ad una latitudine intermedia fra quelle relative al percorso da misurare.
20.7deterMinarelaposizionestiMata(DR position)La determinazione della posizione stimata (DR - dead reckoning position) è forse il procedimento più frequente del carteggio nautico: si tratta di stimare la propria posizione ad una certa ora sulla base dei dati forniti dagli strumenti di bordo quali la bussola e il solcometro (log).
• Video: misurare la distanza fra due punti
Inoltre nella sezione on line troverete:
6
MoDUlo 1 Navigazione stimata
Si parla di «posizione stimata» perché i dati utilizzati non sono certi, in particolare:
üla bussola, sia essa magnetica o giroscopica, fornisce il valore della prora (heading), che non necessariamente coincide con la traiettoria poi realmente seguita rispetto al fondo, cioè la rotta (course over ground);
üil log fornisce la velocità rispetto all’acqua (speed through the water) che non neces-sariamente coincide con la velocità realmente mantenuta rispetto al fondo (speed over ground), la quale è però fornita dal doppler log se si naviga in acque poco profonde (questo rende più attendibili le stime della velocità rispetto a quelle della direzione di moto); capita di utilizzare anche la velocità teorica legata alla sola po-tenza data alle macchine, quindi ai giri dell’elica (se a passo fisso), detta velocità di propulsione (propeller speed).
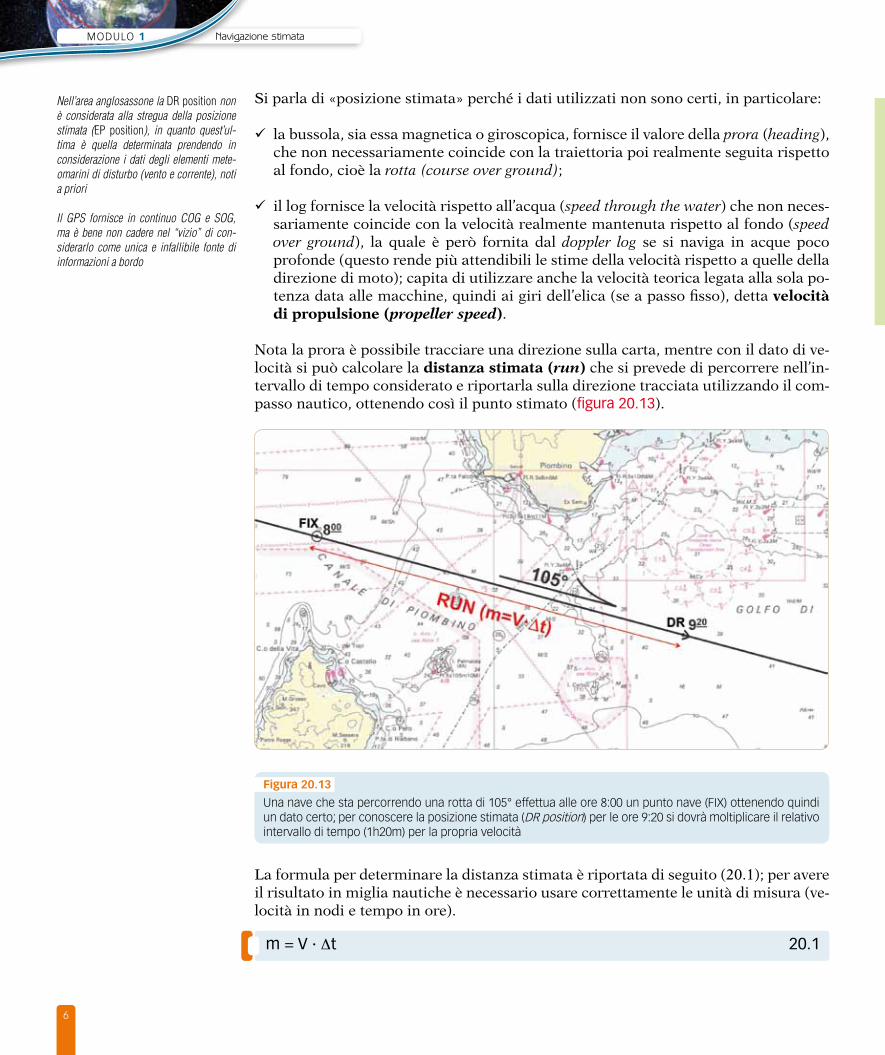
Nota la prora è possibile tracciare una direzione sulla carta, mentre con il dato di ve-locità si può calcolare la distanza stimata (run) che si prevede di percorrere nell’in-tervallo di tempo considerato e riportarla sulla direzione tracciata utilizzando il com-passo nautico, ottenendo così il punto stimato (figura 20.13).
Figura 20.13
Una nave che sta percorrendo una rotta di 105° effettua alle ore 8:00 un punto nave (FIX) ottenendo quindi un dato certo; per conoscere la posizione stimata (DR position) per le ore 9:20 si dovrà moltiplicare il relativo intervallo di tempo (1h20m) per la propria velocità
La formula per determinare la distanza stimata è riportata di seguito (20.1); per avere il risultato in miglia nautiche è necessario usare correttamente le unità di misura (ve-locità in nodi e tempo in ore).
m = V ∙ Dt 20.1
Nell’area anglosassone la DR position non è considerata alla stregua della posizione stimata (EP position), in quanto quest’ul-tima è quella determinata prendendo in considerazione i dati degli elementi mete-omarini di disturbo (vento e corrente), noti a priori
Il GPS fornisce in continuo COG e SOG, ma è bene non cadere nel “vizio” di con-siderarlo come unica e infallibile fonte di informazioni a bordo
EsempiüCalcolare le miglia che si percorreranno in 1h20m ad una velocità di 12 kts (riferito alla figura 20.13)
Il prodotto dei due dati fornisce 8 mg; si può impostare sulla calcolatrice scrivendo (6·1°20’) oppure (6·1,33), perdendo tuttavia in precisione perché il 3 è periodico.
üCalcolare le miglia che si percorreranno in 1h30m ad una velocità di 11 kts.
Il prodotto dei due dati fornisce 16,5 mg; si può impostare sulla calcolatrice scrivendo (11·1°30’) oppure (11·1,5).
üCalcolare le miglia che si percorreranno in 0h45m ad una velocità di 16 kts.
Il prodotto dei due dati fornisce 12 mg; si può impostare sulla calcolatrice scrivendo (16·0°45’) oppure (16·0,75).
Proprio perché è un elemento stimato, la DR position va confrontata con un punto nave vero, trovato con riferi-menti esterni; questo può essere utile per determinare gli elementi dei disturbi meteomarini (vento e corrente), che rappresentano la causa principale, oltre a errori nel governo, della non coincidenza tra posizione vera e stimata.
AttivitA’Esercitazioni sulla carta 5/D
NOTA: gli esercizi che seguono sono da risolvere sulla carta N° 5/D dell’I.I.M. (Dal Canale di Piombino a Promontorio Argentario); i risultati riportati in coda al testo sono ottenuti utilizzando la carta per la navigazione N°5 (non didattica) ed. 2012, quindi con coordinate in WGS 84.
1) Misurare sulla carta le coordinate del faro di Capo Focardo (costa Est dell’Elba). 2) Misurare sulla carta le coordinate di Scoglio Africa (in basso a destra sulla carta). 3) Misurare sulla carta le coordinate dell’estremità di Punta Fetovaia (costa SW dell’Elba). 4) Misurare sulla carta le coordinate del fanale rosso di Salivoli (vicino a Piombino). 5) Misurare sulla carta le coordinate di Scoglio dello Sparviero (Punta Ala). 6) Misurare sulla carta le coordinate del faro di Formica Grande. 7) Misurare sulla carta le coordinate della torre di Punta Avoltore (Argentario). 8) Misurare sulla carta le coordinate del campanie di Marina di Grosseto.9) Determinare la direzione corrispondente all’allineamento tra il faro di Formica Grande e torre Collelungo (sulla costa a
Nord di Cala di Forno).10) Determinare la direzione corrispondente all’allineamento tra Isola Cerboli e Scoglio dello Sparviero (Punta Ala).11) Determinare la direzione corrispondente all’allineamento tra il faro di Capo di Poro (costa Sud dell’Elba) e il faro
dell’Isola Pianosa12) Determinare la distanza in linea d’aria tra le estremità di Capo d’Enfola e Capo Stella (rispettivamente sulla costa Nord
e Sud dell’Elba).13) Determinare la distanza in linea d’aria tra Scoglio Africa e Isola Corbelli (costa Sud dell’Elba).14) Determinare la distanza in linea d’aria tra il faro di Formica Grande e il fanale di Cala Giovanna (Isola Pianosa).15) Determinare la rotta e la distanza per raggiungere Portoferraio (riferimento Scoglietto) da (j = 42°55,0’ N; = 010°10,0’ E).16) Determinare la rotta e la distanza per raggiungere Piombino (riferimento fanale rosso) da (j = 42°44,2’ N; = 010°41,0’ E).17) Determinare la rotta e la distanza per raggiungere Giglio Porto da (j = 42°32,8’ N; = 011°03,8’ E).
7
U.D. 1Scelta ed inseguimento della traiettoria
EsempiüCalcolare le miglia che si percorreranno in 1h20m ad una velocità di 12 kts (riferito alla figura 20.13)
Il prodotto dei due dati fornisce 8 mg; si può impostare sulla calcolatrice scrivendo (6·1°20’) oppure (6·1,33), perdendo tuttavia in precisione perché il 3 è periodico.
üCalcolare le miglia che si percorreranno in 1h30m ad una velocità di 11 kts.
Il prodotto dei due dati fornisce 16,5 mg; si può impostare sulla calcolatrice scrivendo (11·1°30’) oppure (11·1,5).
üCalcolare le miglia che si percorreranno in 0h45m ad una velocità di 16 kts.
Il prodotto dei due dati fornisce 12 mg; si può impostare sulla calcolatrice scrivendo (16·0°45’) oppure (16·0,75).
Proprio perché è un elemento stimato, la DR position va confrontata con un punto nave vero, trovato con riferi-menti esterni; questo può essere utile per determinare gli elementi dei disturbi meteomarini (vento e corrente), che rappresentano la causa principale, oltre a errori nel governo, della non coincidenza tra posizione vera e stimata.
AttivitA’Esercitazioni sulla carta 5/D
NOTA: gli esercizi che seguono sono da risolvere sulla carta N° 5/D dell’I.I.M. (Dal Canale di Piombino a Promontorio Argentario); i risultati riportati in coda al testo sono ottenuti utilizzando la carta per la navigazione N°5 (non didattica) ed. 2012, quindi con coordinate in WGS 84.
1) Misurare sulla carta le coordinate del faro di Capo Focardo (costa Est dell’Elba). 2) Misurare sulla carta le coordinate di Scoglio Africa (in basso a destra sulla carta). 3) Misurare sulla carta le coordinate dell’estremità di Punta Fetovaia (costa SW dell’Elba). 4) Misurare sulla carta le coordinate del fanale rosso di Salivoli (vicino a Piombino). 5) Misurare sulla carta le coordinate di Scoglio dello Sparviero (Punta Ala). 6) Misurare sulla carta le coordinate del faro di Formica Grande. 7) Misurare sulla carta le coordinate della torre di Punta Avoltore (Argentario). 8) Misurare sulla carta le coordinate del campanie di Marina di Grosseto.9) Determinare la direzione corrispondente all’allineamento tra il faro di Formica Grande e torre Collelungo (sulla costa a
Nord di Cala di Forno).10) Determinare la direzione corrispondente all’allineamento tra Isola Cerboli e Scoglio dello Sparviero (Punta Ala).11) Determinare la direzione corrispondente all’allineamento tra il faro di Capo di Poro (costa Sud dell’Elba) e il faro
dell’Isola Pianosa12) Determinare la distanza in linea d’aria tra le estremità di Capo d’Enfola e Capo Stella (rispettivamente sulla costa Nord
e Sud dell’Elba).13) Determinare la distanza in linea d’aria tra Scoglio Africa e Isola Corbelli (costa Sud dell’Elba).14) Determinare la distanza in linea d’aria tra il faro di Formica Grande e il fanale di Cala Giovanna (Isola Pianosa).15) Determinare la rotta e la distanza per raggiungere Portoferraio (riferimento Scoglietto) da (j = 42°55,0’ N; = 010°10,0’ E).16) Determinare la rotta e la distanza per raggiungere Piombino (riferimento fanale rosso) da (j = 42°44,2’ N; = 010°41,0’ E).17) Determinare la rotta e la distanza per raggiungere Giglio Porto da (j = 42°32,8’ N; = 011°03,8’ E).
8
MoDUlo 1 Navigazione stimata
18) Posizionare sulla carta il punto (j = 42°35,0’ N; = 010°56,0’ E) e determinare da esso rilevamento e distanza del faro di Formica Grande.
19) Posizionare sulla carta il punto (j = 42°26,2’ N; = 010°24,0’ E) e determinare da esso rilevamento e distanza di punta del Diavolo (Isola di Montecristo).
20) Posizionare sulla carta il punto (j = 42°42,2’ N; = 010°34,0’ E) e determinare da esso rilevamento e distanza del fanale verde di Porto Azzurro (costa Est dell’Elba)
21) Una nave è partita da (j = 42°30,0’ N; = 010°30,0’ E); conoscendo PV = 035° e VP = 12 kts, si determini la posizione stimata (DR position) dopo 1 ora di navigazione.
22) Una nave è partita alle ore 15:00 da (j = 42°27,0’ N; = 010°53,0’ E); conoscendo PV = 332° e VP = 10 kts, si determini la posizione stimata (DR position) alle ore 16:30.
23) Una nave è partita alle ore 22:00 da (j = 42°26,6’ N; = 010°03,2’ E); conoscendo PV = 049° e VP = 8,5 kts, si determini la posizione stimata (DR position) alle ore 24:00.
24) Una nave è partita alle ore 10:30 da (j = 42°41,1’ N; = 010°09,6’ E); conoscendo PV = 103° e VP = 9 kts, si determini la posizione stimata (DR position) alle ore 13:30.
25) Una nave è partita alle ore 7:45 da (j = 42°56,8’ N; = 009°57,6’ E); conoscendo PV = 095° e VP = 11 kts, si determini la posizione stimata (DR position) alle ore 9:05.
26) Una nave è partita alle ore 23:20 da (j = 42°46,8’ N; = 010°36,2’ E); conoscendo PV = 215° e VP = 13 kts, si determini la posizione stimata (DR position) alle ore 1:35 del giorno successivo.
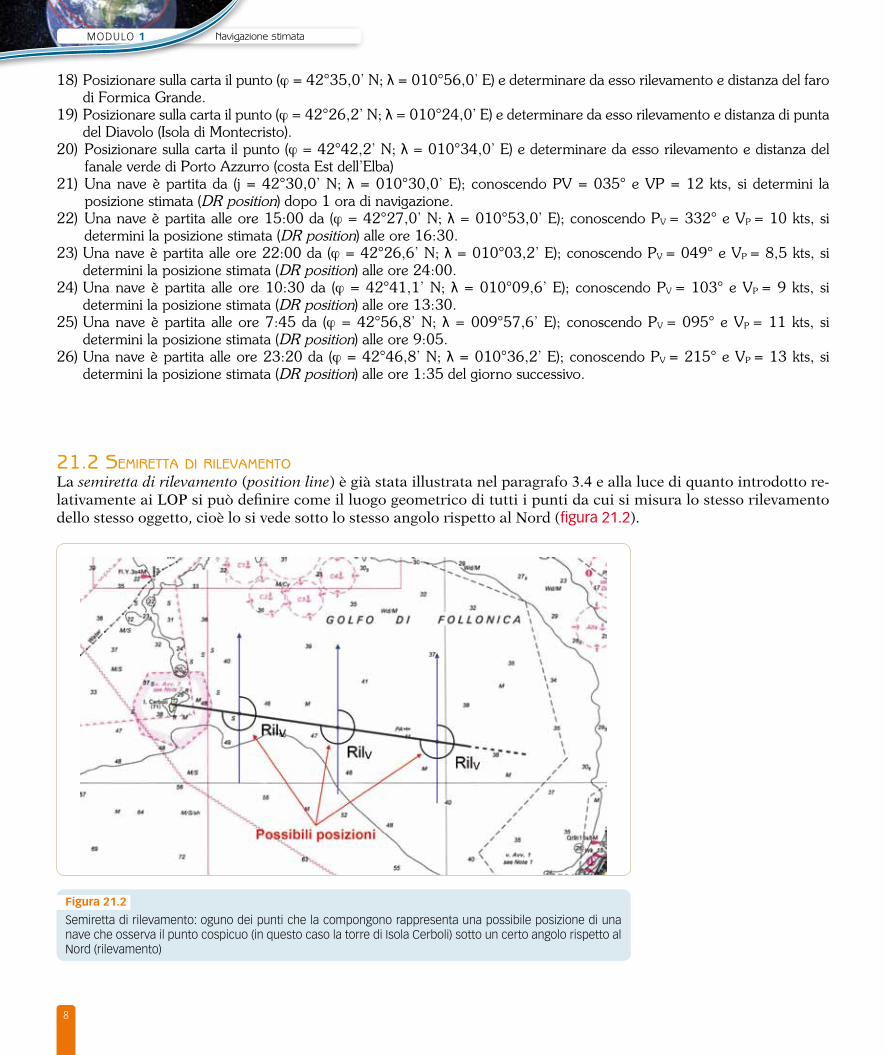
21.2seMirettadirilevaMentoLa semiretta di rilevamento (position line) è già stata illustrata nel paragrafo 3.4 e alla luce di quanto introdotto re-lativamente ai LOP si può definire come il luogo geometrico di tutti i punti da cui si misura lo stesso rilevamento dello stesso oggetto, cioè lo si vede sotto lo stesso angolo rispetto al Nord (figura 21.2).
Figura 21.2
Semiretta di rilevamento: oguno dei punti che la compongono rappresenta una possibile posizione di una nave che osserva il punto cospicuo (in questo caso la torre di Isola Cerboli) sotto un certo angolo rispetto al Nord (rilevamento)
9
U.D. 1Scelta ed inseguimento della traiettoria
La semiretta di rilevamento si può ottenere in seguito a un rilevamento visuale (vi-sual bearing), effettuato con il cerchio azimutale installato solitamente sulla ripeti-trice della gyro, o un rilevamento radar (radar bearing) effettuato con la EBL del radar asservito alla gyro.
Le semirette di rilevamento possono risultare imprecise per errori di osservazione, errori di tracciamento sulla carta, errori negli strumenti o per l’inadeguata rettifica dei valori ottenuti (si pensi alla deviazione della bussola), quindi sia per cause siste-matiche sia per cause accidentali.
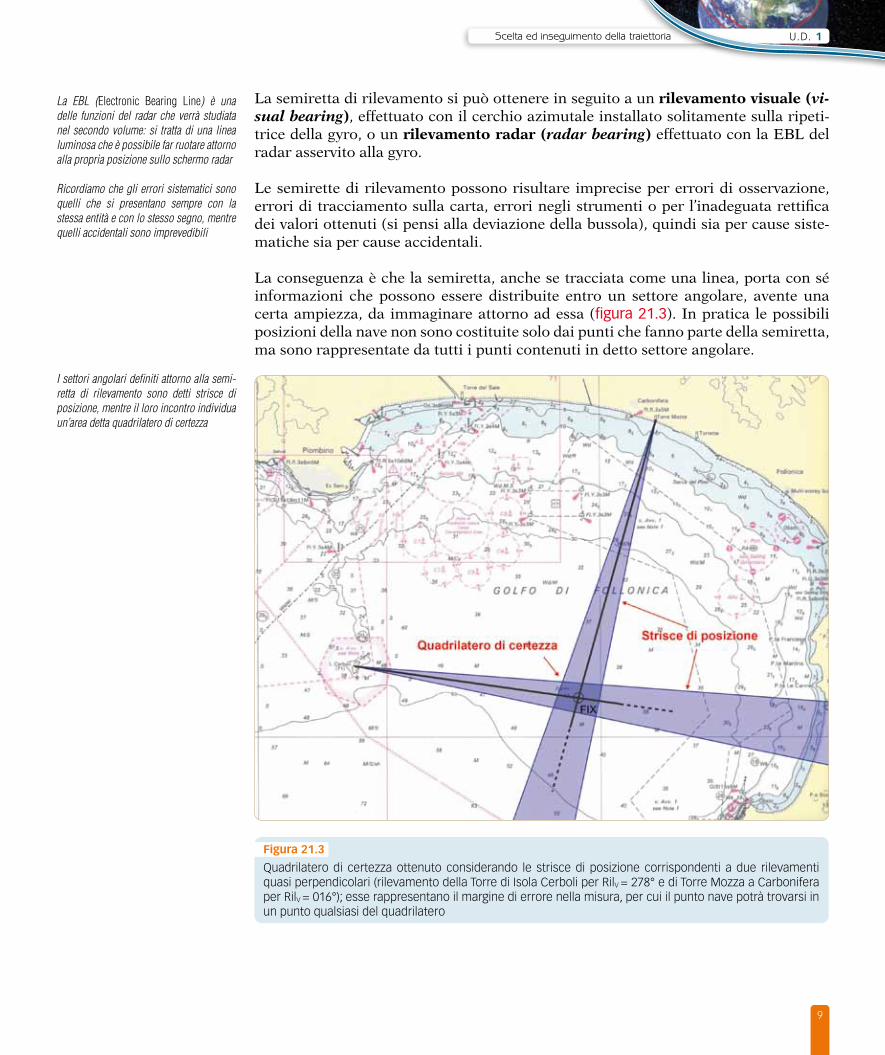
La conseguenza è che la semiretta, anche se tracciata come una linea, porta con sé informazioni che possono essere distribuite entro un settore angolare, avente una certa ampiezza, da immaginare attorno ad essa (figura 21.3). In pratica le possibili posizioni della nave non sono costituite solo dai punti che fanno parte della semiretta, ma sono rappresentate da tutti i punti contenuti in detto settore angolare.
Figura 21.3
Quadrilatero di certezza ottenuto considerando le strisce di posizione corrispondenti a due rilevamenti quasi perpendicolari (rilevamento della Torre di Isola Cerboli per RilV = 278° e di Torre Mozza a Carbonifera per RilV = 016°); esse rappresentano il margine di errore nella misura, per cui il punto nave potrà trovarsi in un punto qualsiasi del quadrilatero
La EBL (Electronic Bearing Line) è una delle funzioni del radar che verrà studiata nel secondo volume: si tratta di una linea luminosa che è possibile far ruotare attorno alla propria posizione sullo schermo radar
Ricordiamo che gli errori sistematici sono quelli che si presentano sempre con la stessa entità e con lo stesso segno, mentre quelli accidentali sono imprevedibili
I settori angolari definiti attorno alla semi-retta di rilevamento sono detti strisce di posizione, mentre il loro incontro individua un’area detta quadrilatero di certezza
10
MoDUlo 1 Navigazione stimata
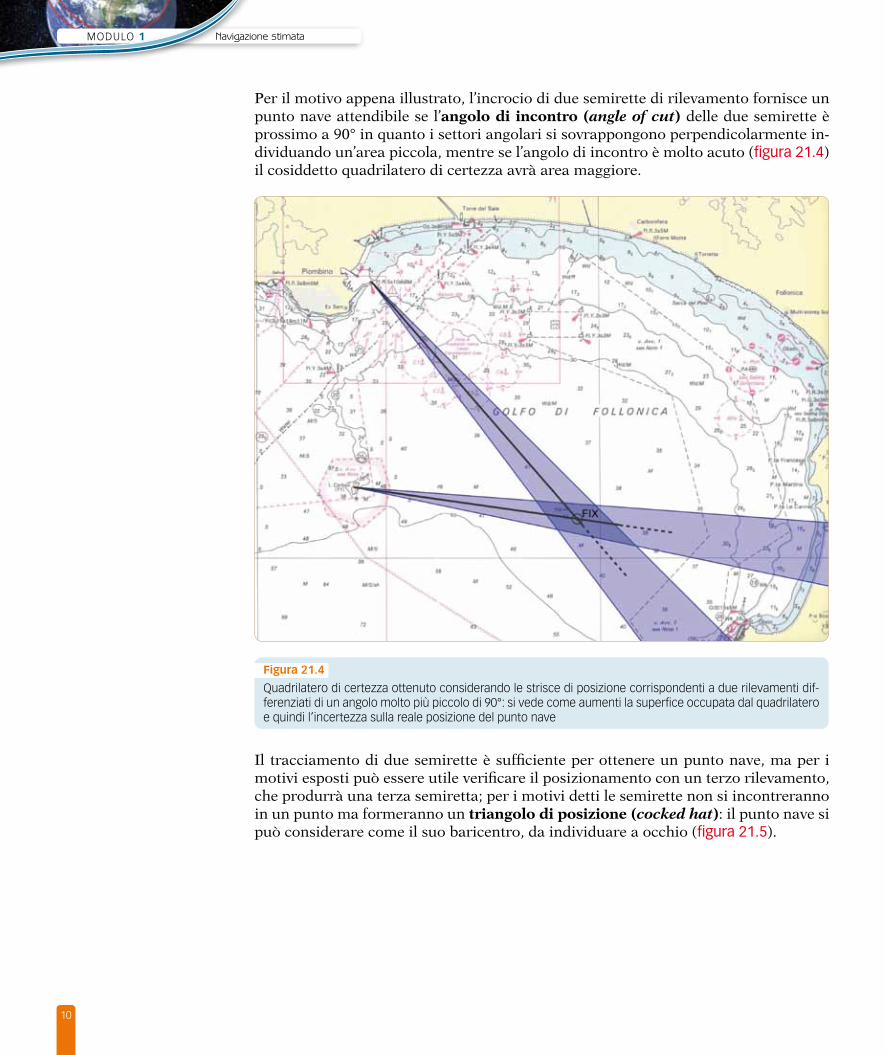
Per il motivo appena illustrato, l’incrocio di due semirette di rilevamento fornisce un punto nave attendibile se l’angolo di incontro (angle of cut) delle due semirette è prossimo a 90° in quanto i settori angolari si sovrappongono perpendicolarmente in-dividuando un’area piccola, mentre se l’angolo di incontro è molto acuto (figura 21.4) il cosiddetto quadrilatero di certezza avrà area maggiore.
Figura 21.4
Quadrilatero di certezza ottenuto considerando le strisce di posizione corrispondenti a due rilevamenti dif-ferenziati di un angolo molto più piccolo di 90°: si vede come aumenti la superfice occupata dal quadrilatero e quindi l’incertezza sulla reale posizione del punto nave
Il tracciamento di due semirette è sufficiente per ottenere un punto nave, ma per i motivi esposti può essere utile verificare il posizionamento con un terzo rilevamento, che produrrà una terza semiretta; per i motivi detti le semirette non si incontreranno in un punto ma formeranno un triangolo di posizione (cocked hat): il punto nave si può considerare come il suo baricentro, da individuare a occhio (figura 21.5).

11
U.D. 1Scelta ed inseguimento della traiettoria
Figura 21.5
È difficile che tre rilevamenti si incontrino precisamente in un punto; solitamente formano un piccolo trian-golo detto cocked hat, al centro del quale si usa individuare il punto nave
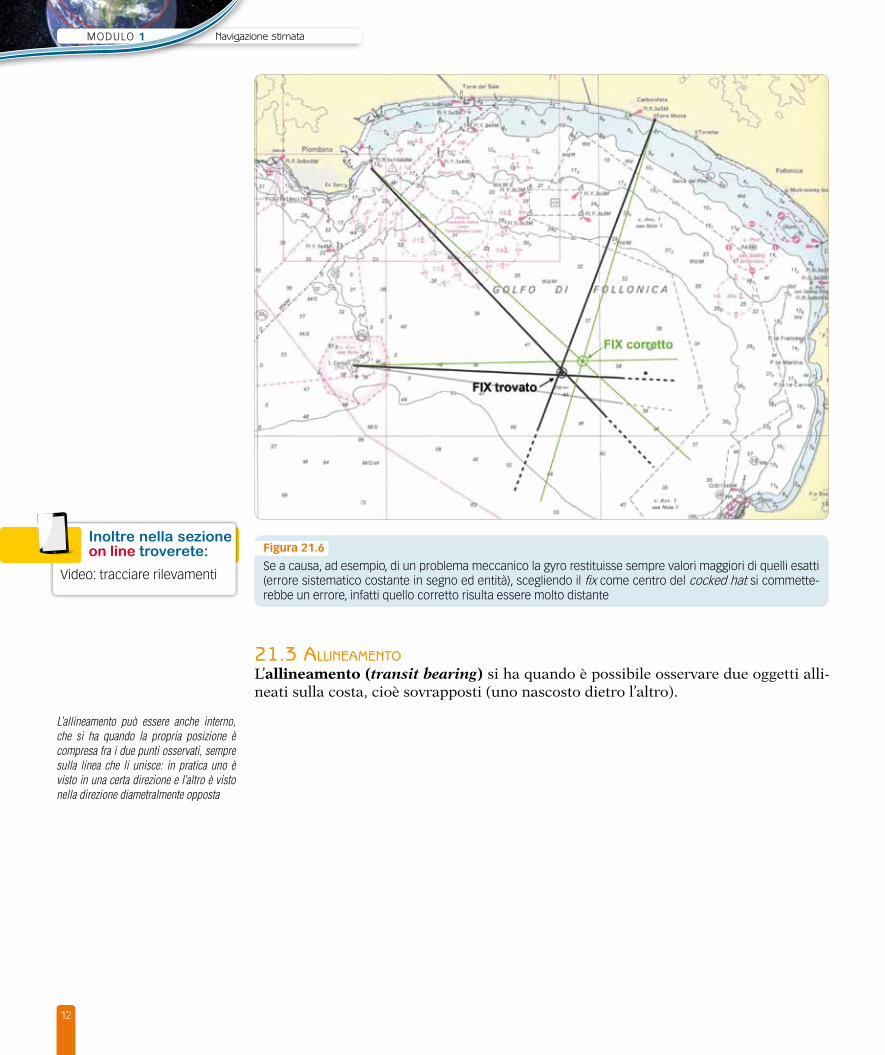
Come si vede in figura 21.6, nel caso in cui si abbia un errore sistematico, ad esempio dovuto ad un errore della bussola, il fix reale può essere anche fuori dal triangolo di posizione, quindi la scelta del baricentro non è sempre la più attendibile: come regola pratica si può scegliere il punto più vicino alla zona più pericolosa (bassi fondali, osta-coli ecc.), ipotizzando cioè sempre la situazione peggiore, in modo che la posizione corretta possa trovarsi solo in un’area più sicura.
Per non appesantire la carta con troppe linee disegnate si usa tracciare solo in par-te la semiretta di rilevamento, cioè se ne disegnano soltanto due segmenti, uno in prossimità del punto cospicuo e un altro in prossimità del punto nave
12
MoDUlo 1 Navigazione stimata
Figura 21.6
Se a causa, ad esempio, di un problema meccanico la gyro restituisse sempre valori maggiori di quelli esatti (errore sistematico costante in segno ed entità), scegliendo il fix come centro del cocked hat si commette-rebbe un errore, infatti quello corretto risulta essere molto distante
21.3allineaMentoL’allineamento (transit bearing) si ha quando è possibile osservare due oggetti alli-neati sulla costa, cioè sovrapposti (uno nascosto dietro l’altro).
Video: tracciare rilevamenti
Inoltre nella sezione on line troverete:
L’allineamento può essere anche interno, che si ha quando la propria posizione è compresa fra i due punti osservati, sempre sulla linea che li unisce: in pratica uno è visto in una certa direzione e l’altro è visto nella direzione diametralmente opposta
13
U.D. 1Scelta ed inseguimento della traiettoria
Figura 21.7
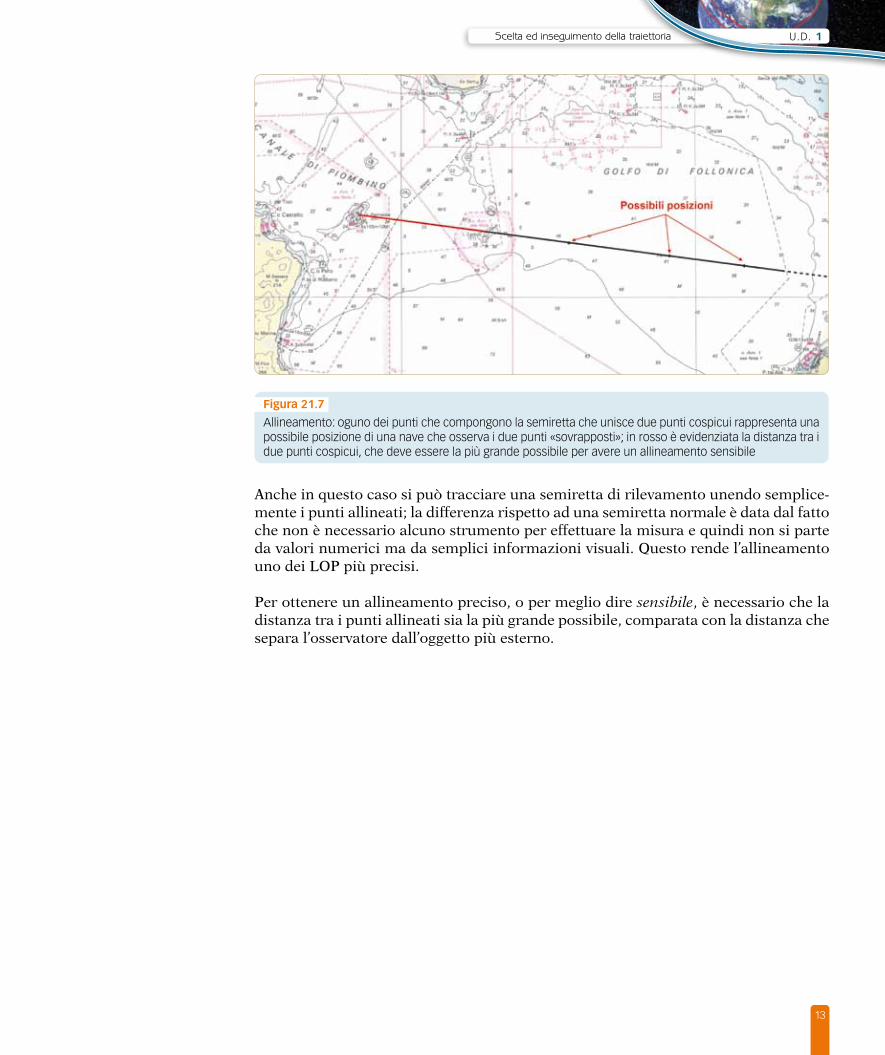
Allineamento: oguno dei punti che compongono la semiretta che unisce due punti cospicui rappresenta una possibile posizione di una nave che osserva i due punti «sovrapposti»; in rosso è evidenziata la distanza tra i due punti cospicui, che deve essere la più grande possibile per avere un allineamento sensibile
Anche in questo caso si può tracciare una semiretta di rilevamento unendo semplice-mente i punti allineati; la differenza rispetto ad una semiretta normale è data dal fatto che non è necessario alcuno strumento per effettuare la misura e quindi non si parte da valori numerici ma da semplici informazioni visuali. Questo rende l’allineamento uno dei LOP più precisi.
Per ottenere un allineamento preciso, o per meglio dire sensibile, è necessario che la distanza tra i punti allineati sia la più grande possibile, comparata con la distanza che separa l’osservatore dall’oggetto più esterno.

14
MoDUlo 1 Navigazione stimata
Figura 21.8
Diversa precisione del posizionamento a mezzo di un allineamento: in posizione 1 l’allineamento è sensibile perché ci si trova ad una distanza dal punto più esterno pari a circa il doppio rispetto alla distanza che separa i due oggetti (evidenziata in rosso), mentre in posizione 2 l’allineamento non sarà sufficientemente preciso perché il rapporto fra le dette distanze supera il valore di 5, convenzionalmente considerato il limite massimo
21.4cerchiodiugualedistanzaIl cerchio di uguale distanza (position circle) è il luogo di posizione che si ottiene quando si misura la distanza che separa la propria posizione da un certo oggetto co-stiero (si tratta in realtà di una circonferenza, chiamata impropriamente cerchio per consuetudine).
Figura 21.9
Cerchio di uguale distanza: oguno dei punti che compongono la circonferenza rappresenta una possibile posizione di una nave che osserva il punto cospicuo ad una certa distanza
15
U.D. 1Scelta ed inseguimento della traiettoria
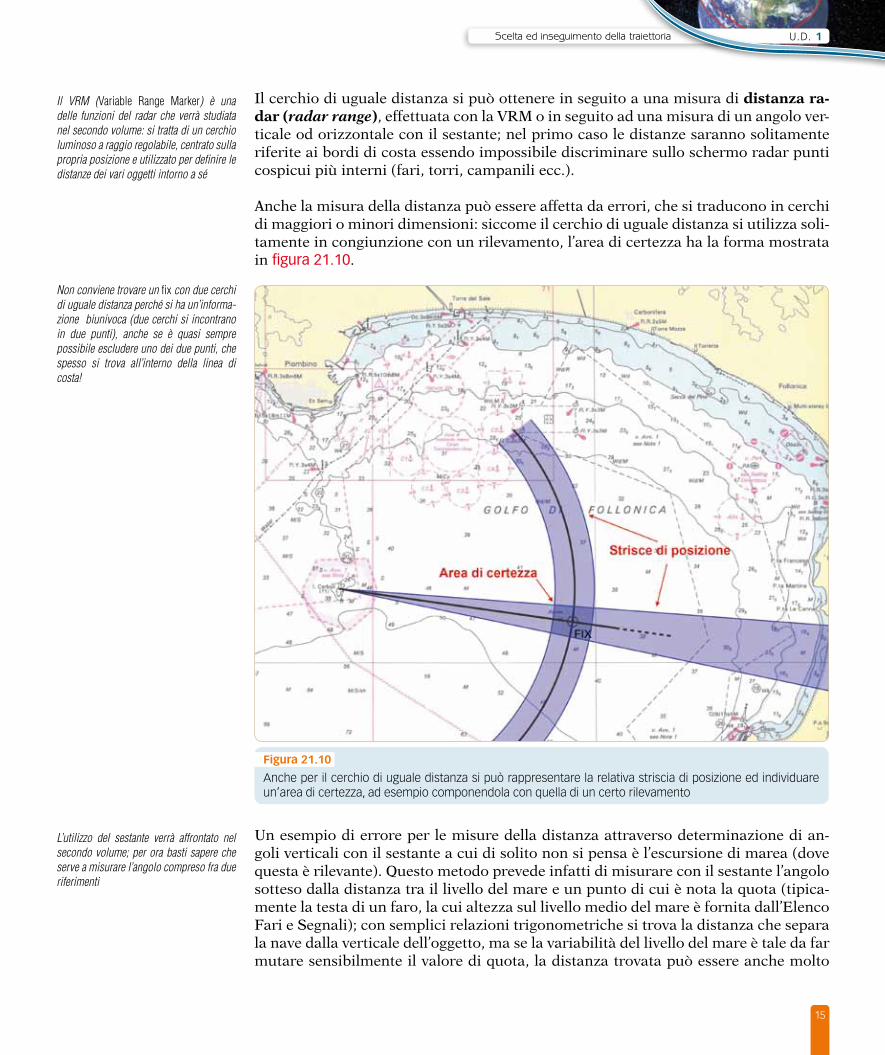
Il cerchio di uguale distanza si può ottenere in seguito a una misura di distanza ra-dar (radar range), effettuata con la VRM o in seguito ad una misura di un angolo ver-ticale od orizzontale con il sestante; nel primo caso le distanze saranno solitamente riferite ai bordi di costa essendo impossibile discriminare sullo schermo radar punti cospicui più interni (fari, torri, campanili ecc.).
Anche la misura della distanza può essere affetta da errori, che si traducono in cerchi di maggiori o minori dimensioni: siccome il cerchio di uguale distanza si utilizza soli-tamente in congiunzione con un rilevamento, l’area di certezza ha la forma mostrata in figura 21.10.
Figura 21.10
Anche per il cerchio di uguale distanza si può rappresentare la relativa striscia di posizione ed individuare un’area di certezza, ad esempio componendola con quella di un certo rilevamento
Un esempio di errore per le misure della distanza attraverso determinazione di an-goli verticali con il sestante a cui di solito non si pensa è l’escursione di marea (dove questa è rilevante). Questo metodo prevede infatti di misurare con il sestante l’angolo sotteso dalla distanza tra il livello del mare e un punto di cui è nota la quota (tipica-mente la testa di un faro, la cui altezza sul livello medio del mare è fornita dall’Elenco Fari e Segnali); con semplici relazioni trigonometriche si trova la distanza che separa la nave dalla verticale dell’oggetto, ma se la variabilità del livello del mare è tale da far mutare sensibilmente il valore di quota, la distanza trovata può essere anche molto
Il VRM (Variable Range Marker) è una delle funzioni del radar che verrà studiata nel secondo volume: si tratta di un cerchio luminoso a raggio regolabile, centrato sulla propria posizione e utilizzato per definire le distanze dei vari oggetti intorno a sé
Non conviene trovare un fix con due cerchi di uguale distanza perché si ha un’informa-zione biunivoca (due cerchi si incontrano in due punti), anche se è quasi sempre possibile escludere uno dei due punti, che spesso si trova all’interno della linea di costa!
L’utilizzo del sestante verrà affrontato nel secondo volume; per ora basti sapere che serve a misurare l’angolo compreso fra due riferimenti
16
MoDUlo 1 Navigazione stimata
diversa da quella esatta.
Figura 21.11
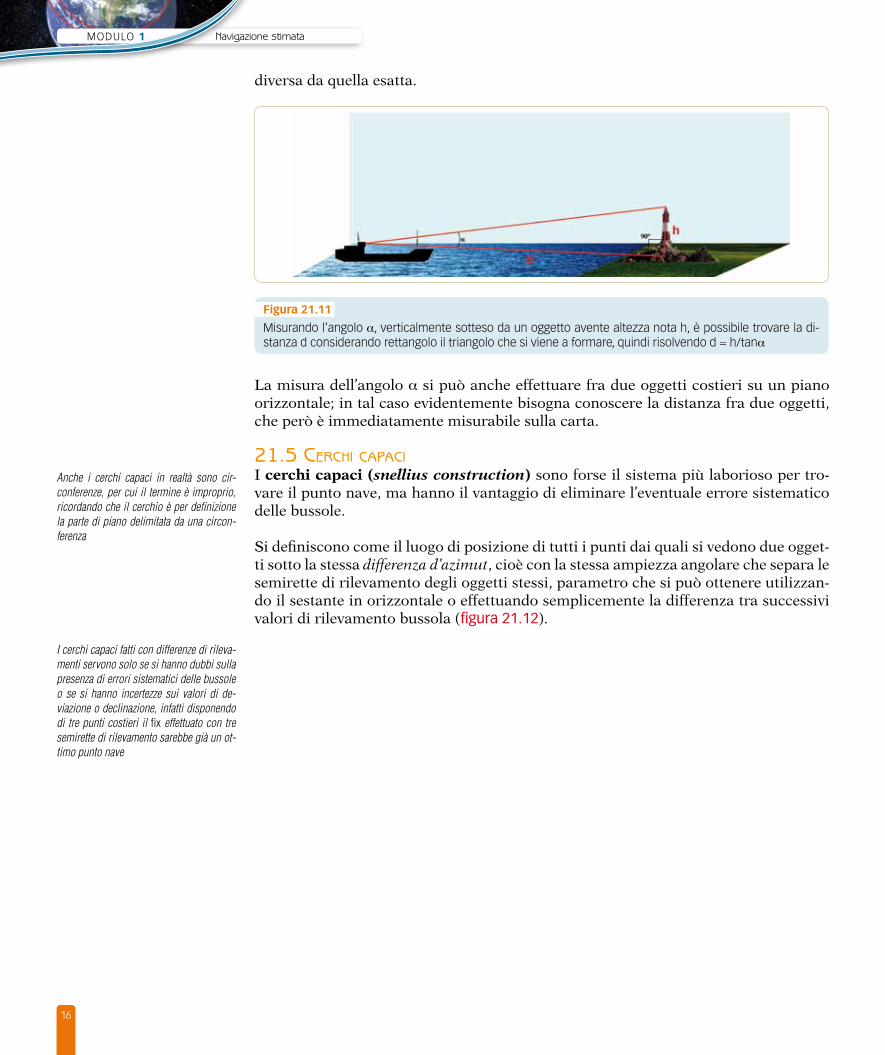
Misurando l’angolo a, verticalmente sotteso da un oggetto avente altezza nota h, è possibile trovare la di-stanza d considerando rettangolo il triangolo che si viene a formare, quindi risolvendo d = h/tana
La misura dell’angolo a si può anche effettuare fra due oggetti costieri su un piano orizzontale; in tal caso evidentemente bisogna conoscere la distanza fra due oggetti, che però è immediatamente misurabile sulla carta.
21.5cerchicapaciI cerchi capaci (snellius construction) sono forse il sistema più laborioso per tro-vare il punto nave, ma hanno il vantaggio di eliminare l’eventuale errore sistematico delle bussole.
Si definiscono come il luogo di posizione di tutti i punti dai quali si vedono due ogget-ti sotto la stessa differenza d’azimut, cioè con la stessa ampiezza angolare che separa le semirette di rilevamento degli oggetti stessi, parametro che si può ottenere utilizzan-do il sestante in orizzontale o effettuando semplicemente la differenza tra successivi valori di rilevamento bussola (figura 21.12).
Anche i cerchi capaci in realtà sono cir-conferenze, per cui il termine è improprio, ricordando che il cerchio è per definizione la parte di piano delimitata da una circon-ferenza
I cerchi capaci fatti con differenze di rileva-menti servono solo se si hanno dubbi sulla presenza di errori sistematici delle bussole o se si hanno incertezze sui valori di de-viazione o declinazione, infatti disponendo di tre punti costieri il fix effettuato con tre semirette di rilevamento sarebbe già un ot-timo punto nave
17
U.D. 1Scelta ed inseguimento della traiettoria
Figura 21.12
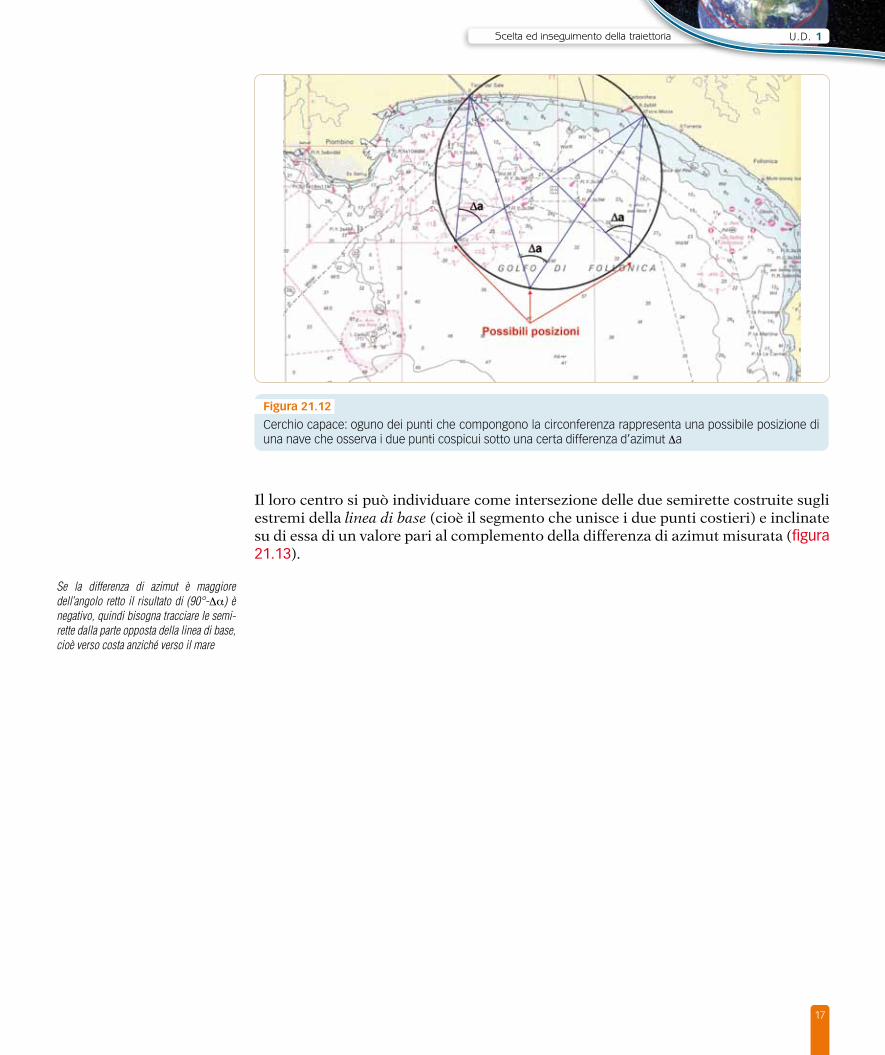
Cerchio capace: oguno dei punti che compongono la circonferenza rappresenta una possibile posizione di una nave che osserva i due punti cospicui sotto una certa differenza d’azimut Da
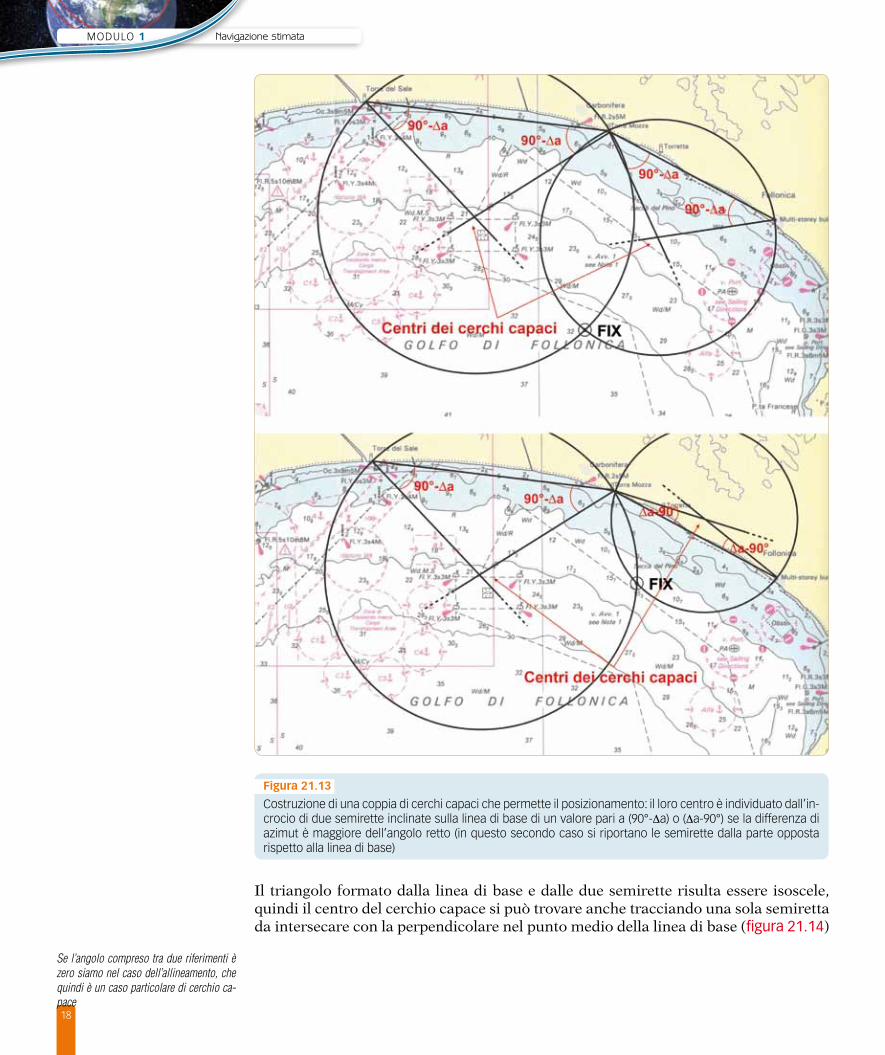
Il loro centro si può individuare come intersezione delle due semirette costruite sugli estremi della linea di base (cioè il segmento che unisce i due punti costieri) e inclinate su di essa di un valore pari al complemento della differenza di azimut misurata (figura 21.13).
Se la differenza di azimut è maggiore dell’angolo retto il risultato di (90°-Da) è negativo, quindi bisogna tracciare le semi-rette dalla parte opposta della linea di base, cioè verso costa anziché verso il mare
18
MoDUlo 1 Navigazione stimata
Figura 21.13
Costruzione di una coppia di cerchi capaci che permette il posizionamento: il loro centro è individuato dall’in-crocio di due semirette inclinate sulla linea di base di un valore pari a (90°-Da) o (Da-90°) se la differenza di azimut è maggiore dell’angolo retto (in questo secondo caso si riportano le semirette dalla parte opposta rispetto alla linea di base)
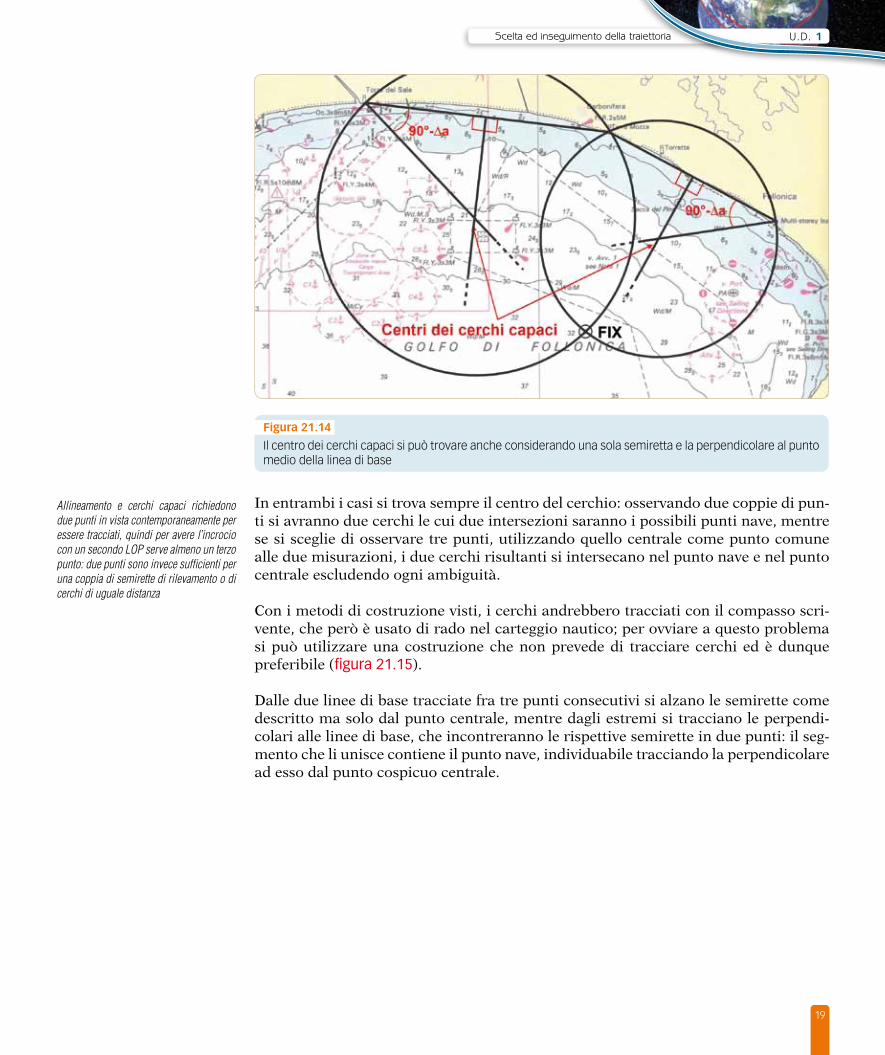
Il triangolo formato dalla linea di base e dalle due semirette risulta essere isoscele, quindi il centro del cerchio capace si può trovare anche tracciando una sola semiretta da intersecare con la perpendicolare nel punto medio della linea di base (figura 21.14)
Se l’angolo compreso tra due riferimenti è zero siamo nel caso dell’allineamento, che quindi è un caso particolare di cerchio ca-pace
19
U.D. 1Scelta ed inseguimento della traiettoria
Figura 21.14
Il centro dei cerchi capaci si può trovare anche considerando una sola semiretta e la perpendicolare al punto medio della linea di base
In entrambi i casi si trova sempre il centro del cerchio: osservando due coppie di pun-ti si avranno due cerchi le cui due intersezioni saranno i possibili punti nave, mentre se si sceglie di osservare tre punti, utilizzando quello centrale come punto comune alle due misurazioni, i due cerchi risultanti si intersecano nel punto nave e nel punto centrale escludendo ogni ambiguità.
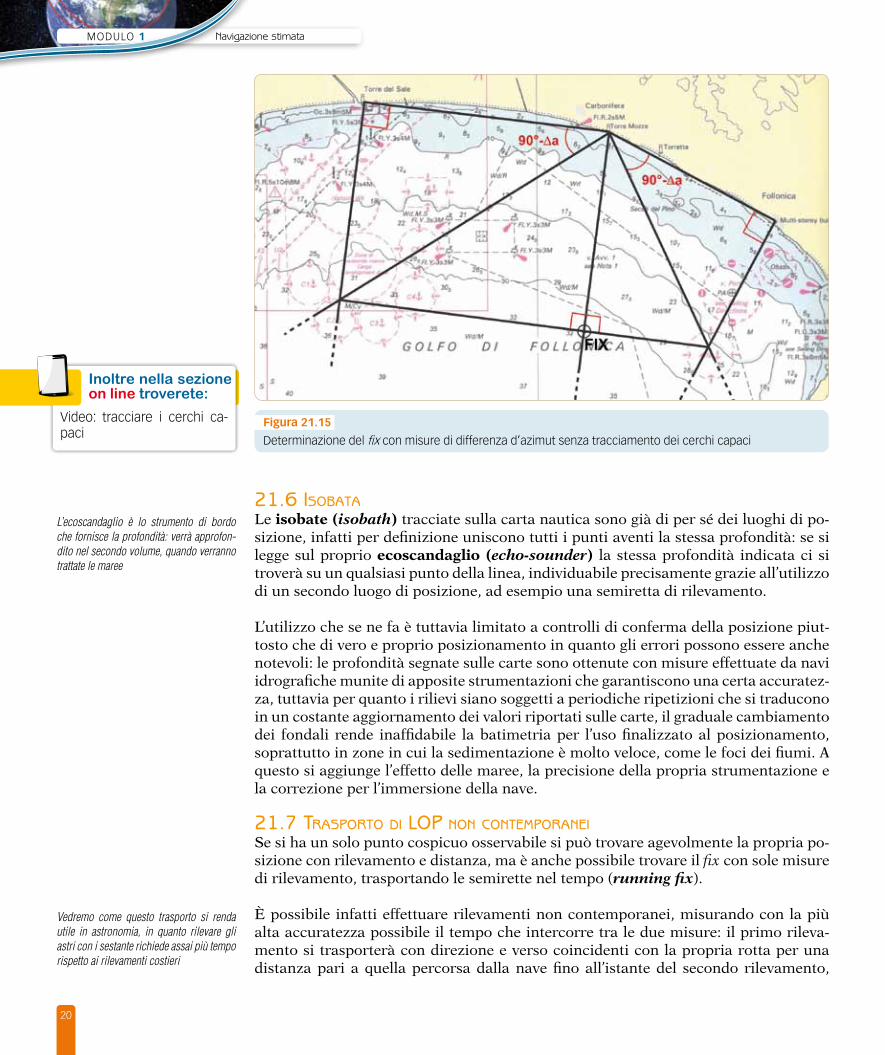
Con i metodi di costruzione visti, i cerchi andrebbero tracciati con il compasso scri-vente, che però è usato di rado nel carteggio nautico; per ovviare a questo problema si può utilizzare una costruzione che non prevede di tracciare cerchi ed è dunque preferibile (figura 21.15).
Dalle due linee di base tracciate fra tre punti consecutivi si alzano le semirette come descritto ma solo dal punto centrale, mentre dagli estremi si tracciano le perpendi-colari alle linee di base, che incontreranno le rispettive semirette in due punti: il seg-mento che li unisce contiene il punto nave, individuabile tracciando la perpendicolare ad esso dal punto cospicuo centrale.
Allineamento e cerchi capaci richiedono due punti in vista contemporaneamente per essere tracciati, quindi per avere l’incrocio con un secondo LOP serve almeno un terzo punto: due punti sono invece sufficienti per una coppia di semirette di rilevamento o di cerchi di uguale distanza
20
MoDUlo 1 Navigazione stimata
Figura 21.15
Determinazione del fix con misure di differenza d’azimut senza tracciamento dei cerchi capaci
21.6isobataLe isobate (isobath) tracciate sulla carta nautica sono già di per sé dei luoghi di po-sizione, infatti per definizione uniscono tutti i punti aventi la stessa profondità: se si legge sul proprio ecoscandaglio (echo-sounder) la stessa profondità indicata ci si troverà su un qualsiasi punto della linea, individuabile precisamente grazie all’utilizzo di un secondo luogo di posizione, ad esempio una semiretta di rilevamento.
L’utilizzo che se ne fa è tuttavia limitato a controlli di conferma della posizione piut-tosto che di vero e proprio posizionamento in quanto gli errori possono essere anche notevoli: le profondità segnate sulle carte sono ottenute con misure effettuate da navi idrografiche munite di apposite strumentazioni che garantiscono una certa accuratez-za, tuttavia per quanto i rilievi siano soggetti a periodiche ripetizioni che si traducono in un costante aggiornamento dei valori riportati sulle carte, il graduale cambiamento dei fondali rende inaffidabile la batimetria per l’uso finalizzato al posizionamento, soprattutto in zone in cui la sedimentazione è molto veloce, come le foci dei fiumi. A questo si aggiunge l’effetto delle maree, la precisione della propria strumentazione e la correzione per l’immersione della nave.
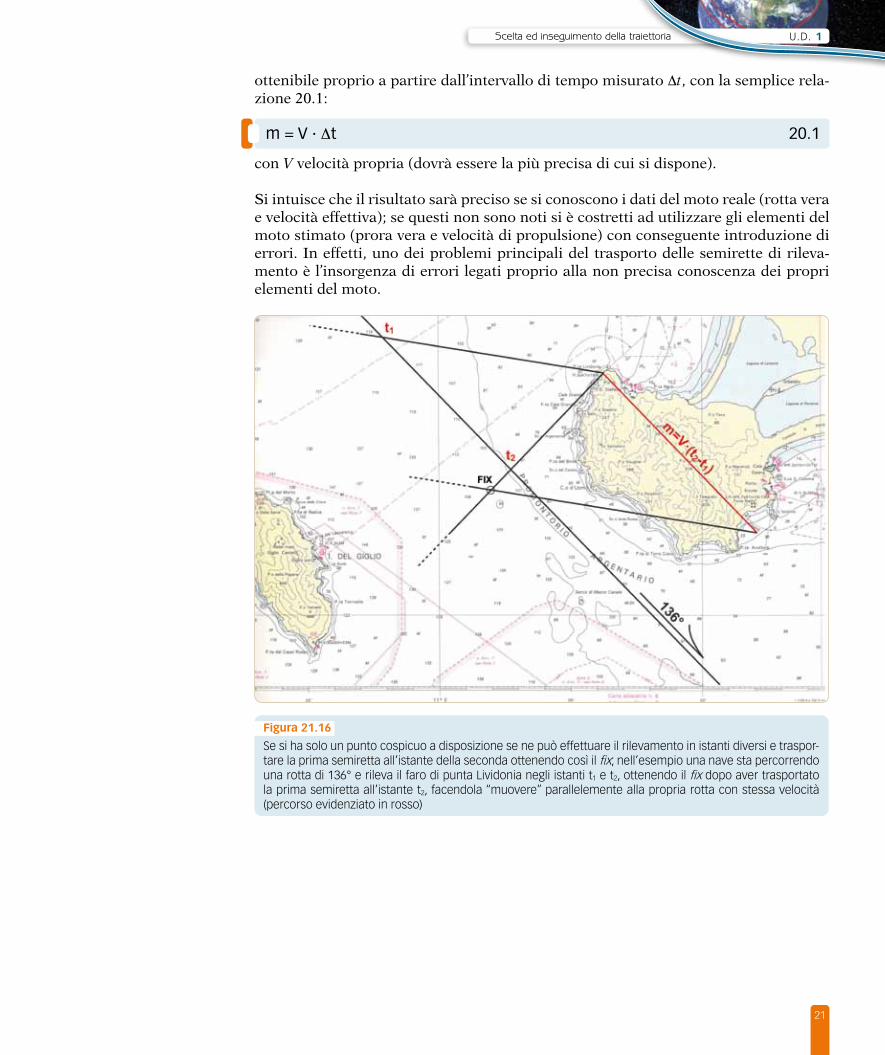
21.7trasportodilopnonconteMporaneiSe si ha un solo punto cospicuo osservabile si può trovare agevolmente la propria po-sizione con rilevamento e distanza, ma è anche possibile trovare il fix con sole misure di rilevamento, trasportando le semirette nel tempo (running fix).
È possibile infatti effettuare rilevamenti non contemporanei, misurando con la più alta accuratezza possibile il tempo che intercorre tra le due misure: il primo rileva-mento si trasporterà con direzione e verso coincidenti con la propria rotta per una distanza pari a quella percorsa dalla nave fino all’istante del secondo rilevamento,
Video: tracciare i cerchi ca-paci
Inoltre nella sezione on line troverete:
L’ecoscandaglio è lo strumento di bordo che fornisce la profondità: verrà approfon-dito nel secondo volume, quando verranno trattate le maree
Vedremo come questo trasporto si renda utile in astronomia, in quanto rilevare gli astri con i sestante richiede assai più tempo rispetto ai rilevamenti costieri
21
U.D. 1Scelta ed inseguimento della traiettoria
ottenibile proprio a partire dall’intervallo di tempo misurato Dt, con la semplice rela-zione 20.1:
m = V ∙ Dt 20.1
con V velocità propria (dovrà essere la più precisa di cui si dispone).
Si intuisce che il risultato sarà preciso se si conoscono i dati del moto reale (rotta vera e velocità effettiva); se questi non sono noti si è costretti ad utilizzare gli elementi del moto stimato (prora vera e velocità di propulsione) con conseguente introduzione di errori. In effetti, uno dei problemi principali del trasporto delle semirette di rileva-mento è l’insorgenza di errori legati proprio alla non precisa conoscenza dei propri elementi del moto.
Figura 21.16
Se si ha solo un punto cospicuo a disposizione se ne può effettuare il rilevamento in istanti diversi e traspor-tare la prima semiretta all’istante della seconda ottenendo così il fix; nell’esempio una nave sta percorrendo una rotta di 136° e rileva il faro di punta lividonia negli istanti t1 e t2, ottenendo il fix dopo aver trasportato la prima semiretta all’istante t2, facendola “muovere” parallelemente alla propria rotta con stessa velocità (percorso evidenziato in rosso)
22
MoDUlo 1 Navigazione stimata
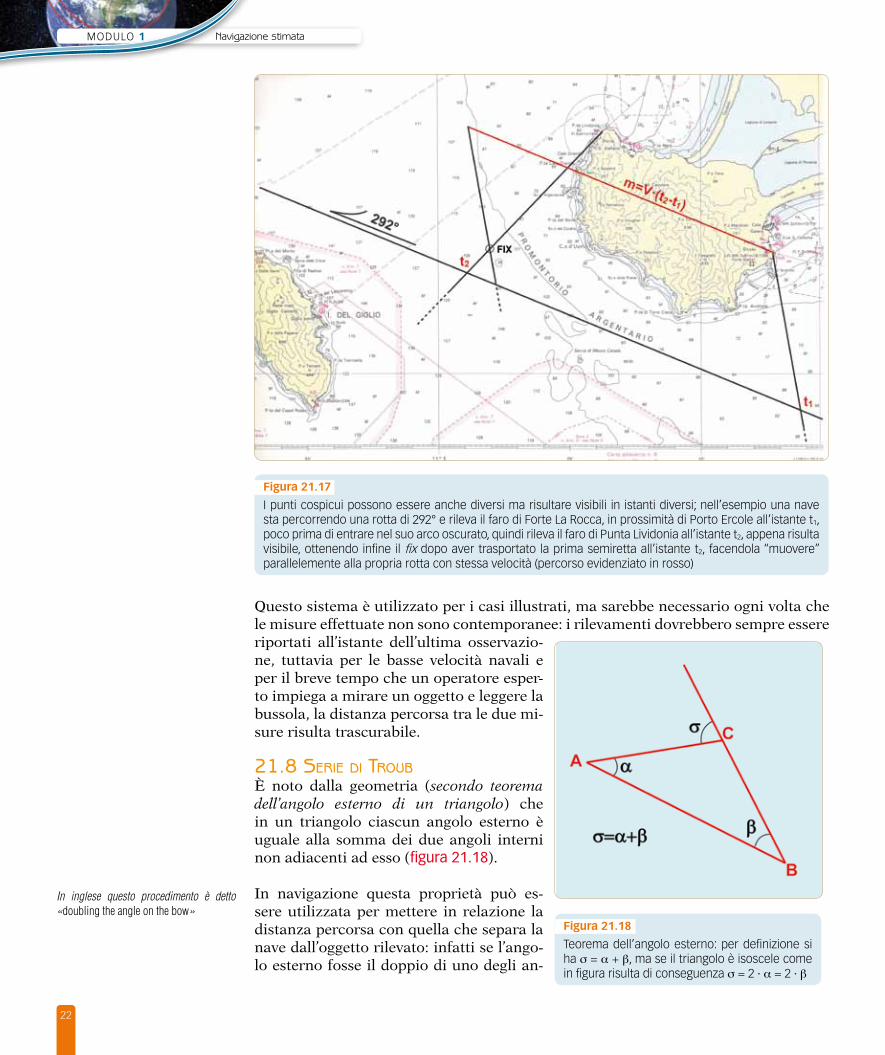
Figura 21.17
I punti cospicui possono essere anche diversi ma risultare visibili in istanti diversi; nell’esempio una nave sta percorrendo una rotta di 292° e rileva il faro di Forte la Rocca, in prossimità di Porto Ercole all’istante t1, poco prima di entrare nel suo arco oscurato, quindi rileva il faro di Punta lividonia all’istante t2, appena risulta visibile, ottenendo infine il fix dopo aver trasportato la prima semiretta all’istante t2, facendola “muovere” parallelemente alla propria rotta con stessa velocità (percorso evidenziato in rosso)
Questo sistema è utilizzato per i casi illustrati, ma sarebbe necessario ogni volta che le misure effettuate non sono contemporanee: i rilevamenti dovrebbero sempre essere riportati all’istante dell’ultima osservazio-ne, tuttavia per le basse velocità navali e per il breve tempo che un operatore esper-to impiega a mirare un oggetto e leggere la bussola, la distanza percorsa tra le due mi-sure risulta trascurabile.
21.8serieditroubÈ noto dalla geometria (secondo teorema dell’angolo esterno di un triangolo) che in un triangolo ciascun angolo esterno è uguale alla somma dei due angoli interni non adiacenti ad esso (figura 21.18).
In navigazione questa proprietà può es-sere utilizzata per mettere in relazione la distanza percorsa con quella che separa la nave dall’oggetto rilevato: infatti se l’ango-lo esterno fosse il doppio di uno degli an-
Figura 21.18
Teorema dell’angolo esterno: per definizione si ha s = a + b, ma se il triangolo è isoscele come in figura risulta di conseguenza s = 2 · a = 2 · b
In inglese questo procedimento è detto «doubling the angle on the bow»
23
U.D. 1Scelta ed inseguimento della traiettoria
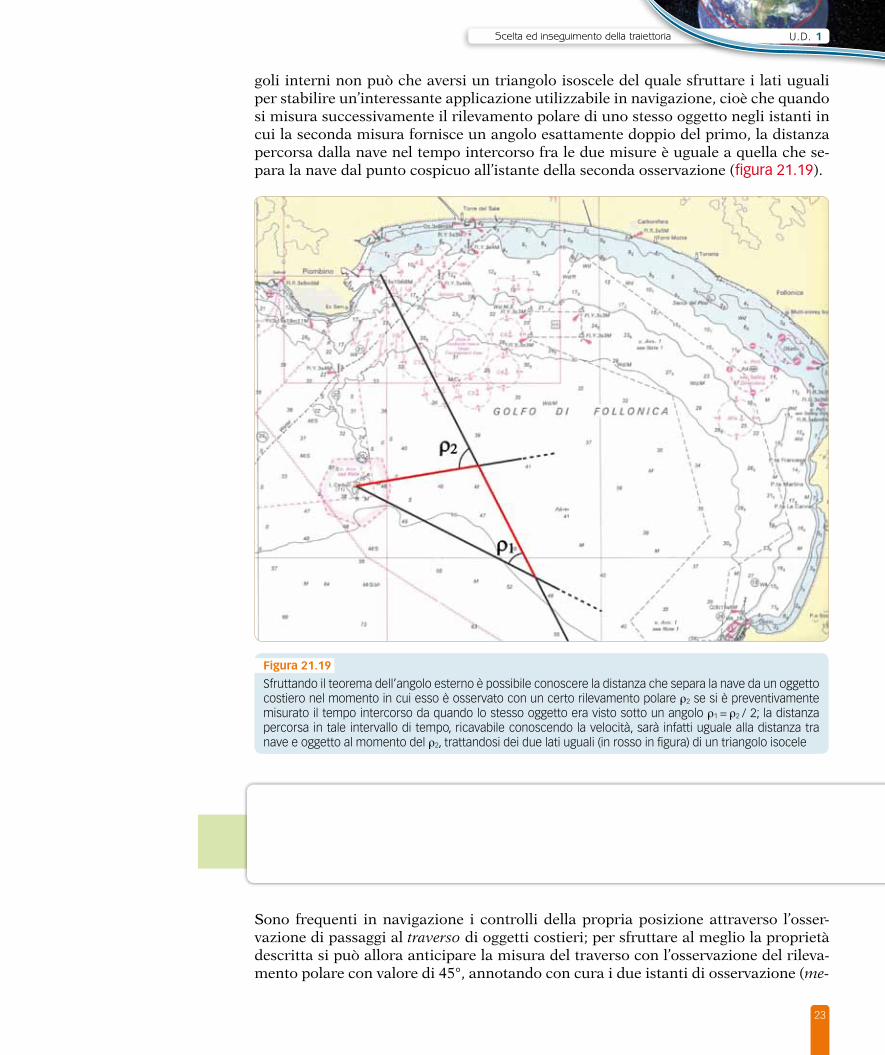
goli interni non può che aversi un triangolo isoscele del quale sfruttare i lati uguali per stabilire un’interessante applicazione utilizzabile in navigazione, cioè che quando si misura successivamente il rilevamento polare di uno stesso oggetto negli istanti in cui la seconda misura fornisce un angolo esattamente doppio del primo, la distanza percorsa dalla nave nel tempo intercorso fra le due misure è uguale a quella che se-para la nave dal punto cospicuo all’istante della seconda osservazione (figura 21.19).
Figura 21.19
Sfruttando il teorema dell’angolo esterno è possibile conoscere la distanza che separa la nave da un oggetto costiero nel momento in cui esso è osservato con un certo rilevamento polare r2 se si è preventivamente misurato il tempo intercorso da quando lo stesso oggetto era visto sotto un angolo r1 = r2 / 2; la distanza percorsa in tale intervallo di tempo, ricavabile conoscendo la velocità, sarà infatti uguale alla distanza tra nave e oggetto al momento del r2, trattandosi dei due lati uguali (in rosso in figura) di un triangolo isocele
Esempioüse una nave che viaggia a 10 kts rileva un faro alle ore 8:00 con r = 38° e, successivamente,
alle 8:18 lo rileva per r = 76° la distanza percorsa, pari a 3 mg (m = V · Δt), sarà la stessa che separa la nave dal faro alle 8:18.
Sono frequenti in navigazione i controlli della propria posizione attraverso l’osser-vazione di passaggi al traverso di oggetti costieri; per sfruttare al meglio la proprietà descritta si può allora anticipare la misura del traverso con l’osservazione del rileva-mento polare con valore di 45°, annotando con cura i due istanti di osservazione (me-
24
MoDUlo 1 Navigazione stimata
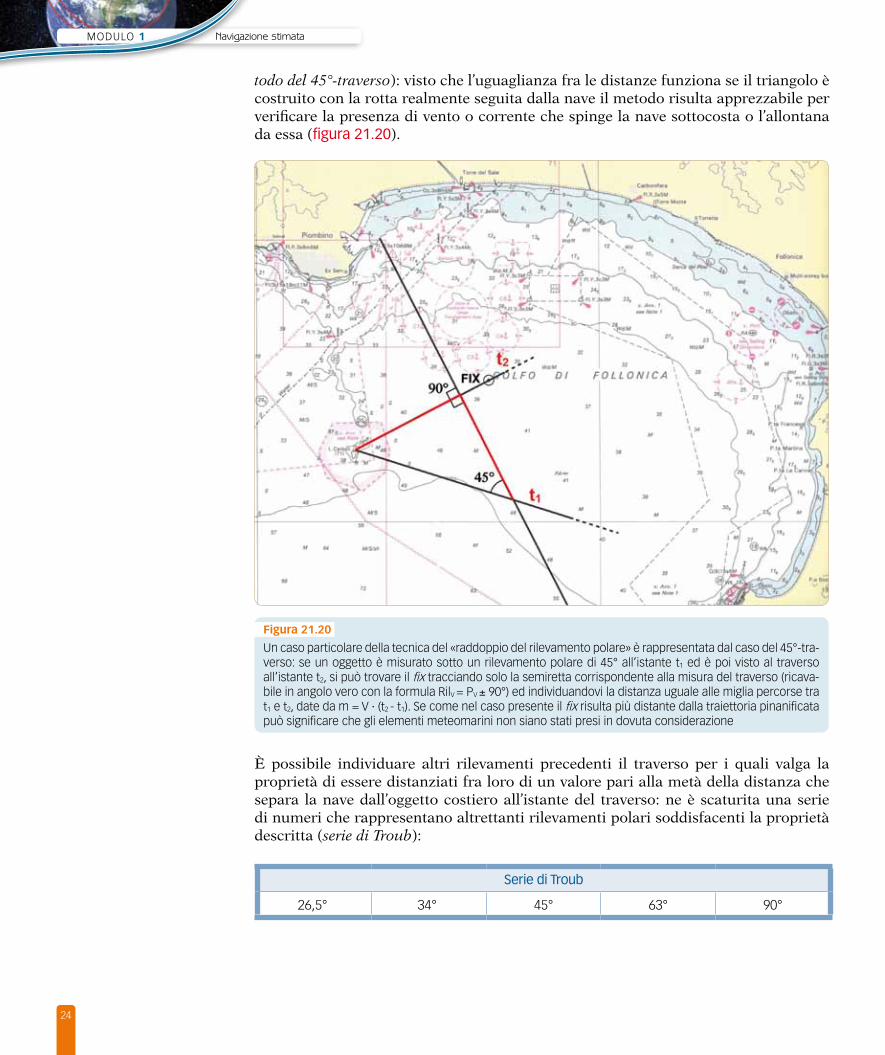
todo del 45°-traverso): visto che l’uguaglianza fra le distanze funziona se il triangolo è costruito con la rotta realmente seguita dalla nave il metodo risulta apprezzabile per verificare la presenza di vento o corrente che spinge la nave sottocosta o l’allontana da essa (figura 21.20).
Figura 21.20
Un caso particolare della tecnica del «raddoppio del rilevamento polare» è rappresentata dal caso del 45°-tra-verso: se un oggetto è misurato sotto un rilevamento polare di 45° all’istante t1 ed è poi visto al traverso all’istante t2, si può trovare il fix tracciando solo la semiretta corrispondente alla misura del traverso (ricava-bile in angolo vero con la formula RilV = PV ± 90°) ed individuandovi la distanza uguale alle miglia percorse tra t1 e t2, date da m = V · (t2 - t1). Se come nel caso presente il fix risulta più distante dalla traiettoria pinanificata può significare che gli elementi meteomarini non siano stati presi in dovuta considerazione
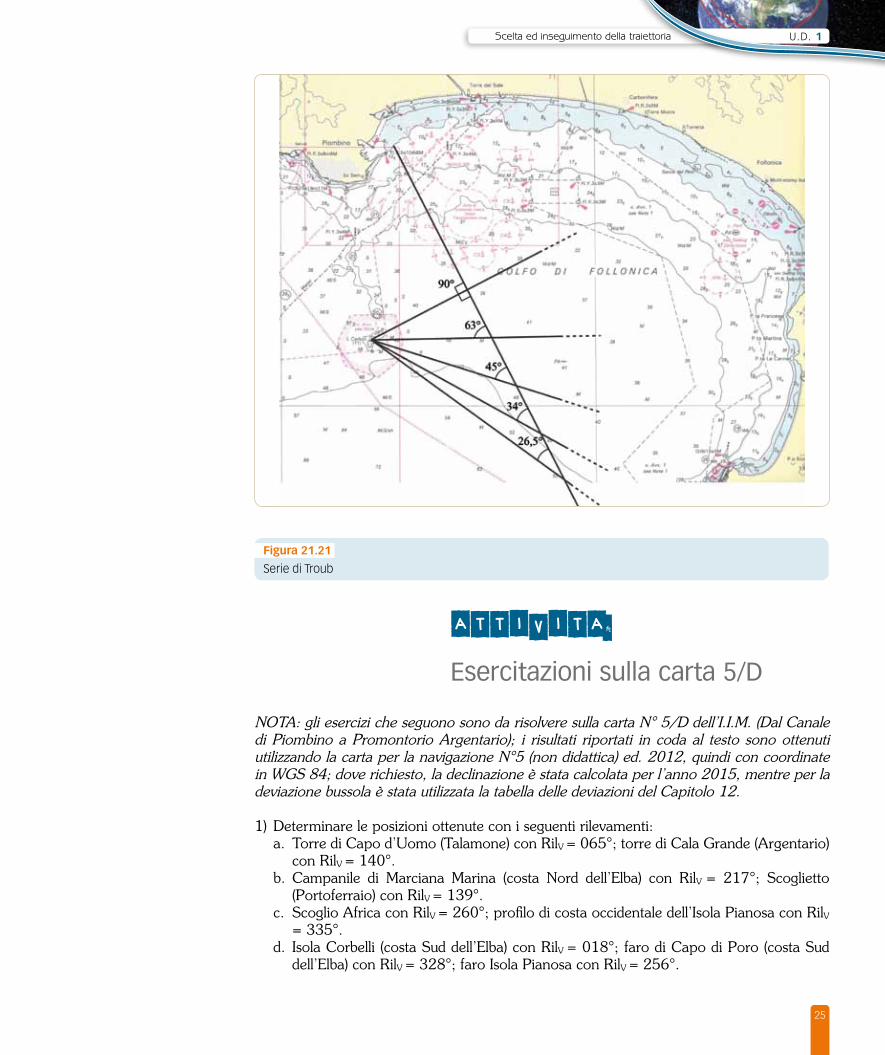
È possibile individuare altri rilevamenti precedenti il traverso per i quali valga la proprietà di essere distanziati fra loro di un valore pari alla metà della distanza che separa la nave dall’oggetto costiero all’istante del traverso: ne è scaturita una serie di numeri che rappresentano altrettanti rilevamenti polari soddisfacenti la proprietà descritta (serie di Troub):
Serie di Troub
26,5° 34° 45° 63° 90°
25
U.D. 1Scelta ed inseguimento della traiettoria
Figura 21.21
Serie di Troub
AttivitA’Esercitazioni sulla carta 5/D
NOTA: gli esercizi che seguono sono da risolvere sulla carta N° 5/D dell’I.I.M. (Dal Canale di Piombino a Promontorio Argentario); i risultati riportati in coda al testo sono ottenuti utilizzando la carta per la navigazione N°5 (non didattica) ed. 2012, quindi con coordinate in WGS 84; dove richiesto, la declinazione è stata calcolata per l’anno 2015, mentre per la deviazione bussola è stata utilizzata la tabella delle deviazioni del Capitolo 12.
1) Determinare le posizioni ottenute con i seguenti rilevamenti:a. Torre di Capo d’Uomo (Talamone) con RilV = 065°; torre di Cala Grande (Argentario)
con RilV = 140°.b. Campanile di Marciana Marina (costa Nord dell’Elba) con RilV = 217°; Scoglietto
(Portoferraio) con RilV = 139°.c. Scoglio Africa con RilV = 260°; profilo di costa occidentale dell’Isola Pianosa con RilV
= 335°.d. Isola Corbelli (costa Sud dell’Elba) con RilV = 018°; faro di Capo di Poro (costa Sud
dell’Elba) con RilV = 328°; faro Isola Pianosa con RilV = 256°.
26
MoDUlo 1 Navigazione stimata
e. Torre di Capo Ortano (costa Est dell’Elba) con RilV = 297°; torre di Isola Cerboli con RilV = 356°; torre di Punta Ala con RilV = 071°.
f. Faro di Capo Focardo (costa Est dell’Elba) con Rilb = 250°; Isola Palmaiola con Rilb = 331° (nota la Pb = 340°).g. Torre del Sale (Piombino) con Rilb = 000°; torre di Punta Ala con Rilb = 098° (nota la Pb = 040°).h. Torre di Capo d’Uomo (Argentario) con Rilg = 113°; faro di Punta del Fenaio (Isola del Giglio) con Rilg = 229° (eseguiti
con ripetitrice di una gyro munita di correttore automatico).i. Faro di Punta del Fenaio (Isola del Giglio) con Rilg = 118°; faro di Formica Grande con Rilg = 046° (nota la Pg = 342°
e la V = 12 kts).
2) Determinare le posizioni ottenute con i seguenti rilevamenti e distanza:a. Formica Grande con RilV = 290° e d = 4 mg.b. Scoglio Africa con RilV = 240° e d = 8 mg.c. Scoglio dello Sparviero (Punta Ala) con RilV = 048° e d = 5,8 mg.d. Isola Corbelli (costa Sud dell’Elba) con Rilb = 060° e d = 6 mg (nota la Pb = 110°).e. Scoglio Africa con Rilb = 115° e d = 5,4 mg (nota la Pb = 048°).f. Punta del Marchese (profilo di costa settentrionale dell’Isola Pianosa) con Rilb = 082° e d = 5,2 mg (nota la Pb = 006°).
3) Determinare le posizioni ottenute con le seguenti coppie di differenze d’azimut (cerchi capaci):a. Da = 52° tra campanile di Castiglione della Pescaia e campanile di Marina di Grosseto e Da = 61° tra campanile di
Marina di Grosseto e torre di Cala di Forno.b. Da = 70° tra faro di Punta Fenaio (Isola del Giglio) e faro di Punta Lividonia (Argentario) e Da = 79° tra faro di Punta
Lividonia (Argentario) e faro di Formica Grande.c. Da = 72° tra faro Isola Pianosa e faro di Capo di Poro (costa Sud dell’Elba) e Da = 50° tra faro di Capo di Poro (costa
Sud dell’Elba) e Isola Corbelli (costa Sud dell’Elba).
4) Determinare le posizioni ottenute con le seguenti coppie rilevamento + isobata:a. Faro dell’Isola Pianosa con RilV = 295° e isobata dei 100 m.b. Torre Cannelle (nei pressi di Talamone) con RilV = 070° e isobata dei 100 m.c. Faro di Formica Grande con RilV = 044° e isobata dei 200 m.
5) Determinare le posizioni ottenute con i seguenti rilevamenti trasportati:a. Formica Grande con RilV = 113° e successivamente, dopo 30 minuti, con RilV = 045°, nota PV = 155° e VP = 12 kts.b. Faro di Punta del Fenaio (Isola del Giglio) alle 22:45 con RilV = 105° e successivamente, alle 23:08, con RilV = 185°,
nota PV = 062° e VP = 12 kts.c. Faro di Capo Focardo (costa Est dell’Elba) alle 02:30 con RilV = 308° e successivamente, alle 03:20, faro di Capo di
Poro (costa Sud dell’Elba) con RilV = 354°, nota PV = 235° e VP = 15,6 kts.
6) Determinare le posizioni ottenute con rilevamento e distanza ottenute con il metodo del 45°-traverso:a. Isola Corbelli (costa Sud dell’Elba) con r = +45° e successivamente, dopo 15 minuti, con r = +90°, nota PV = 270° e
VP = 11,2 kts.b. Faro di Formica Grande alle 06:12 con r = +45° e successivamente, alle 6:42, con r = +90°, nota PV = 325° e VP
= 9,6 kts.c. Scoglio Africa alle 23:55 con r = -45° e successivamente, alle 00:11, con r = -90°, nota PV = 257° e VP = 15 kts.
27
U.D. 1Scelta ed inseguimento della traiettoria
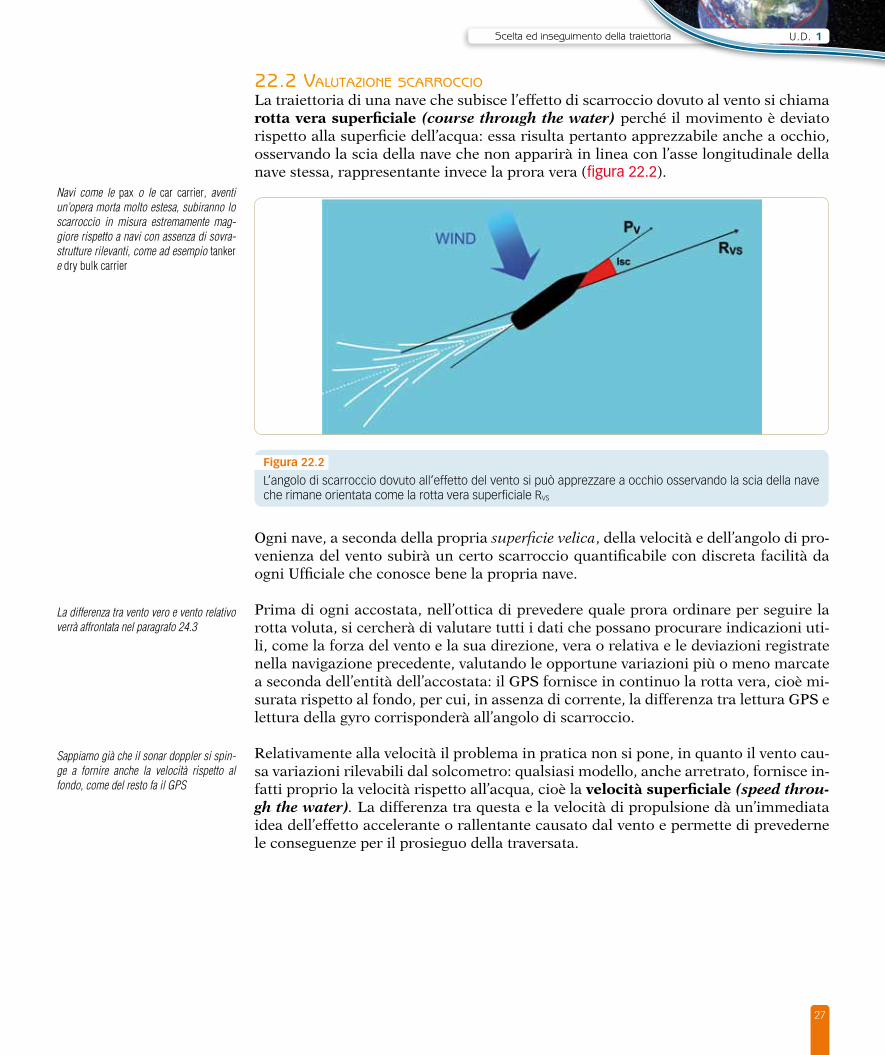
22.2valutazionescarroccioLa traiettoria di una nave che subisce l’effetto di scarroccio dovuto al vento si chiama rotta vera superficiale (course through the water) perché il movimento è deviato rispetto alla superficie dell’acqua: essa risulta pertanto apprezzabile anche a occhio, osservando la scia della nave che non apparirà in linea con l’asse longitudinale della nave stessa, rappresentante invece la prora vera (figura 22.2).
Figura 22.2
l’angolo di scarroccio dovuto all’effetto del vento si può apprezzare a occhio osservando la scia della nave che rimane orientata come la rotta vera superficiale RVS
Ogni nave, a seconda della propria superficie velica, della velocità e dell’angolo di pro-venienza del vento subirà un certo scarroccio quantificabile con discreta facilità da ogni Ufficiale che conosce bene la propria nave.
Prima di ogni accostata, nell’ottica di prevedere quale prora ordinare per seguire la rotta voluta, si cercherà di valutare tutti i dati che possano procurare indicazioni uti-li, come la forza del vento e la sua direzione, vera o relativa e le deviazioni registrate nella navigazione precedente, valutando le opportune variazioni più o meno marcate a seconda dell’entità dell’accostata: il GPS fornisce in continuo la rotta vera, cioè mi-surata rispetto al fondo, per cui, in assenza di corrente, la differenza tra lettura GPS e lettura della gyro corrisponderà all’angolo di scarroccio.
Relativamente alla velocità il problema in pratica non si pone, in quanto il vento cau-sa variazioni rilevabili dal solcometro: qualsiasi modello, anche arretrato, fornisce in-fatti proprio la velocità rispetto all’acqua, cioè la velocità superficiale (speed throu-gh the water). La differenza tra questa e la velocità di propulsione dà un’immediata idea dell’effetto accelerante o rallentante causato dal vento e permette di prevederne le conseguenze per il prosieguo della traversata.
Navi come le pax o le car carrier, aventi un’opera morta molto estesa, subiranno lo scarroccio in misura estremamente mag-giore rispetto a navi con assenza di sovra-strutture rilevanti, come ad esempio tanker e dry bulk carrier
La differenza tra vento vero e vento relativo verrà affrontata nel paragrafo 24.3
Sappiamo già che il sonar doppler si spin-ge a fornire anche la velocità rispetto al fondo, come del resto fa il GPS
28
MoDUlo 1 Navigazione stimata
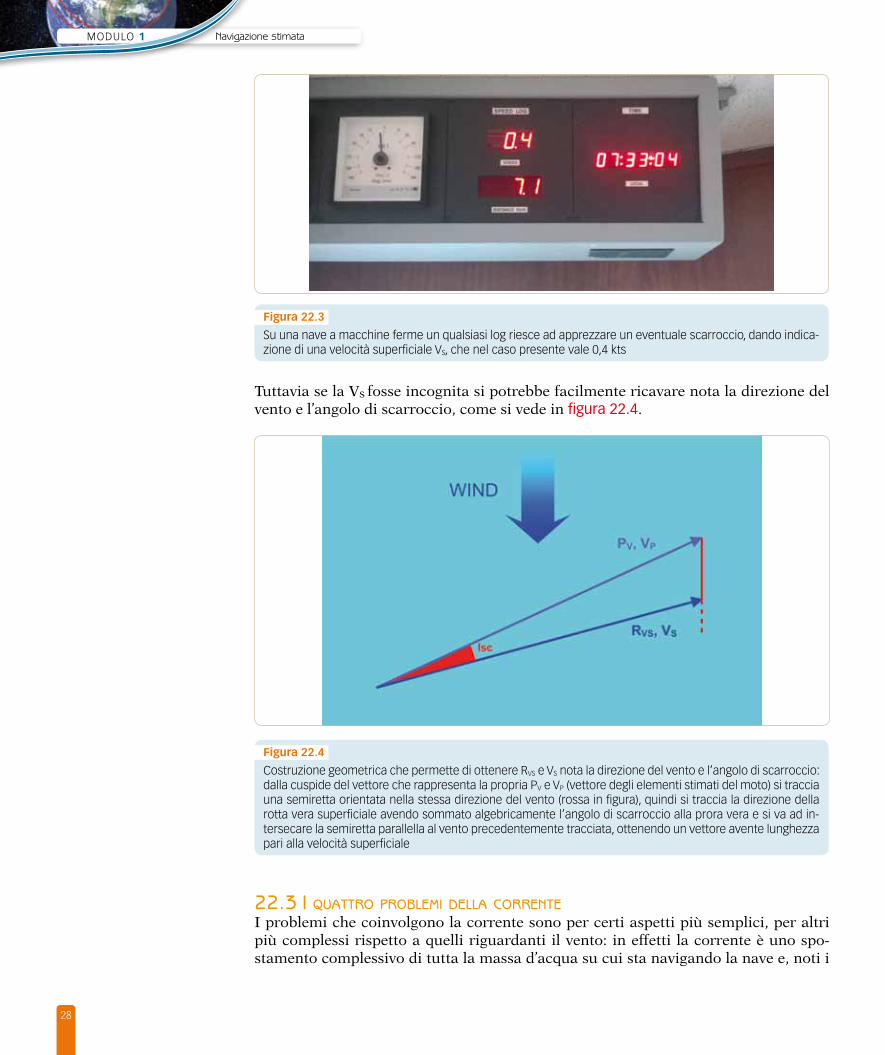
Figura 22.3
Su una nave a macchine ferme un qualsiasi log riesce ad apprezzare un eventuale scarroccio, dando indica-zione di una velocità superficiale VS, che nel caso presente vale 0,4 kts
Tuttavia se la VS fosse incognita si potrebbe facilmente ricavare nota la direzione del vento e l’angolo di scarroccio, come si vede in figura 22.4.
Figura 22.4
Costruzione geometrica che permette di ottenere RVS e VS nota la direzione del vento e l’angolo di scarroccio: dalla cuspide del vettore che rappresenta la propria PV e VP (vettore degli elementi stimati del moto) si traccia una semiretta orientata nella stessa direzione del vento (rossa in figura), quindi si traccia la direzione della rotta vera superficiale avendo sommato algebricamente l’angolo di scarroccio alla prora vera e si va ad in-tersecare la semiretta parallella al vento precedentemente tracciata, ottenendo un vettore avente lunghezza pari alla velocità superficiale
22.3iquattroprobleMidellacorrenteI problemi che coinvolgono la corrente sono per certi aspetti più semplici, per altri più complessi rispetto a quelli riguardanti il vento: in effetti la corrente è uno spo-stamento complessivo di tutta la massa d’acqua su cui sta navigando la nave e, noti i
29
U.D. 1Scelta ed inseguimento della traiettoria
suoi elementi, si possono stabilire relazioni vettoriali fra i vari elementi di moto, con-trariamente al vento che, anche se costante, cambia il suo effetto a seconda del tipo di nave, della sua velocità e dell’angolazione con cui la investe; tuttavia, proprio per lo stesso motivo, l’effetto della corrente sulla velocità non è rilevabile dai solcometri tradizionali.
La corrente è individuata da direzione e intensità, chiamati rispettivamente azimut corrente aC (set) che è l’angolo compreso fra il ramo nord della linea meridiana e la direzione della corrente, contato in senso orario da 0° a 360°, e velocità della corren-te VC (rate).
La corrente è un fenomeno oceanografico molto più regolare del vento ed è possibile raccoglierne i dati per redigere stime statisticamente attendibili da pubblicare su vari supporti alla navigazione come Sailing Directions e Pilot/Routeing Charts (per i nostri mari anche dai Portolani e dall’Atlante delle Correnti Superficiali dei Mari Italiani, editi dall’IIM).
La velocità effettiva è fornita dal GPS e dal sonar doppler, di cui comunque ormai pressoché tutte le navi sono dotate: in mare aperto il doppler, quando non riesce a battere il fondale, fornisce la velocità rispetto all’acqua, sfruttando però le stratifica-zioni di densità profonde, dove le correnti sono molto contenute, per cui si può dire che l’indicazione sia comunque quella del moto rispetto alla terra.
I problemi che tradizionalmente si pongono per considerare l’effetto della corrente, in assenza di vento, si sviluppano come operazioni vettoriali da svolgere fra tre vettori:
üVettore degli elementi stimati: è costituito dalla prora vera PV per quanto riguarda direzione e verso e dalla velocità di propulsione VP per quanto riguarda l’intensità;
üVettore degli elementi veri: è costituito dalla rotta vera RV per quanto riguarda dire-zione e verso e dalla velocità effettiva VE per quanto riguarda l’intensità;
üVettore degli elementi della corrente: è costituito dall’azimut corrente aC per quanto riguarda direzione e verso e dalla velocità della corrente VC per quanto riguarda l’intensità.
Il reale moto della nave, cioè l’ultimo vettore, risulterà dalla composizione dei primi due, cioè vale la relazione:
VE
= VP
+ VC
22.3
Seguendo i principi della somma vettoriale con la regola della punta-coda la corretta composizione dei tre vettori risulta sempre quella per cui la cuspide del vettore degli elementi della corrente coincide con la cuspide del vettore degli elementi veri: con questa regola generale, che possiamo chiamare in modo informale “regola delle cuspidi” si possono affrontare tutti i casi che si presentano in navigazione, che sono essenzial-mente quattro.
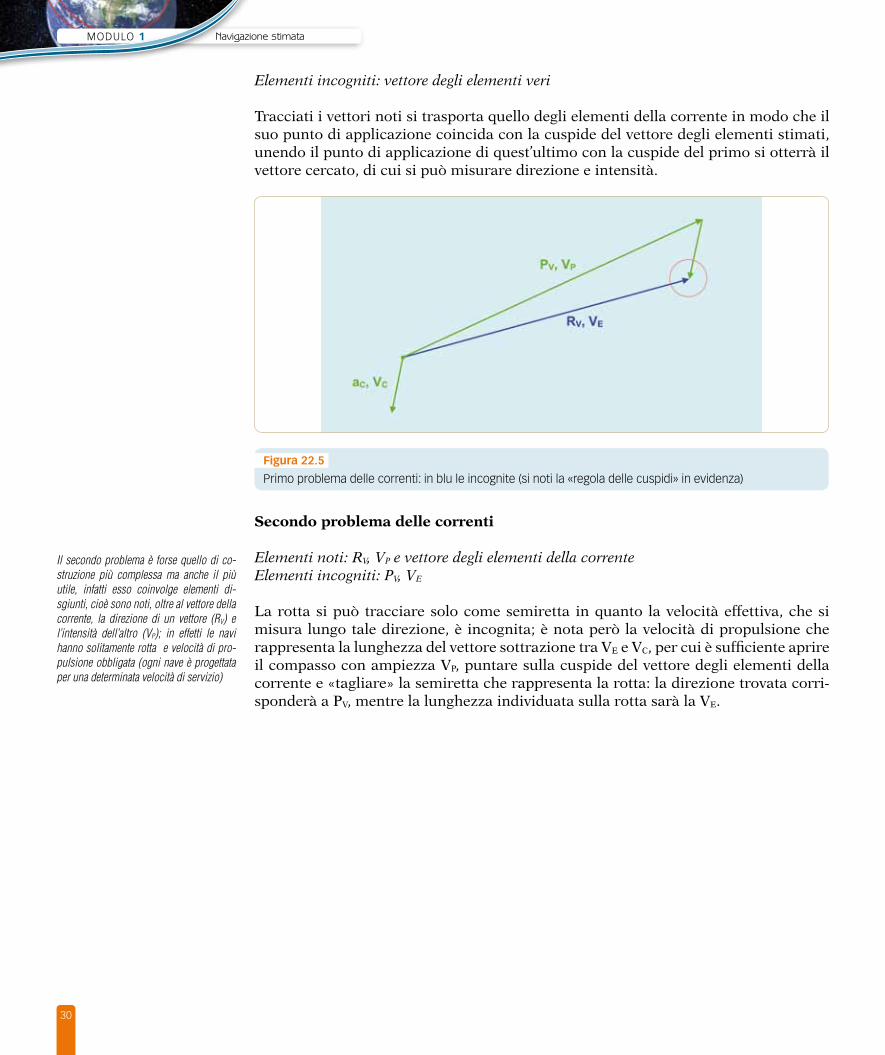
Primo problema delle correnti
Elementi noti: vettore degli elementi stimati e vettore degli elementi della corrente
Una corrente di 2 kts farà muovere una nave inizialmente ferma con velocità di 2 kts, ma un vento di 20 kts non farà scarrocciare la nave con una velocità di 20 kts!
Il primo problema evidentemente non è molto utilizzato nella pratica perché esclu-de la possibilità di dirigere la nave verso un punto preciso: si impostano gli elementi del proprio moto, si considera la corrente e si prende atto del reale moto che la nave seguirà
30
MoDUlo 1 Navigazione stimata
Elementi incogniti: vettore degli elementi veri
Tracciati i vettori noti si trasporta quello degli elementi della corrente in modo che il suo punto di applicazione coincida con la cuspide del vettore degli elementi stimati, unendo il punto di applicazione di quest’ultimo con la cuspide del primo si otterrà il vettore cercato, di cui si può misurare direzione e intensità.
Figura 22.5
Primo problema delle correnti: in blu le incognite (si noti la «regola delle cuspidi» in evidenza)
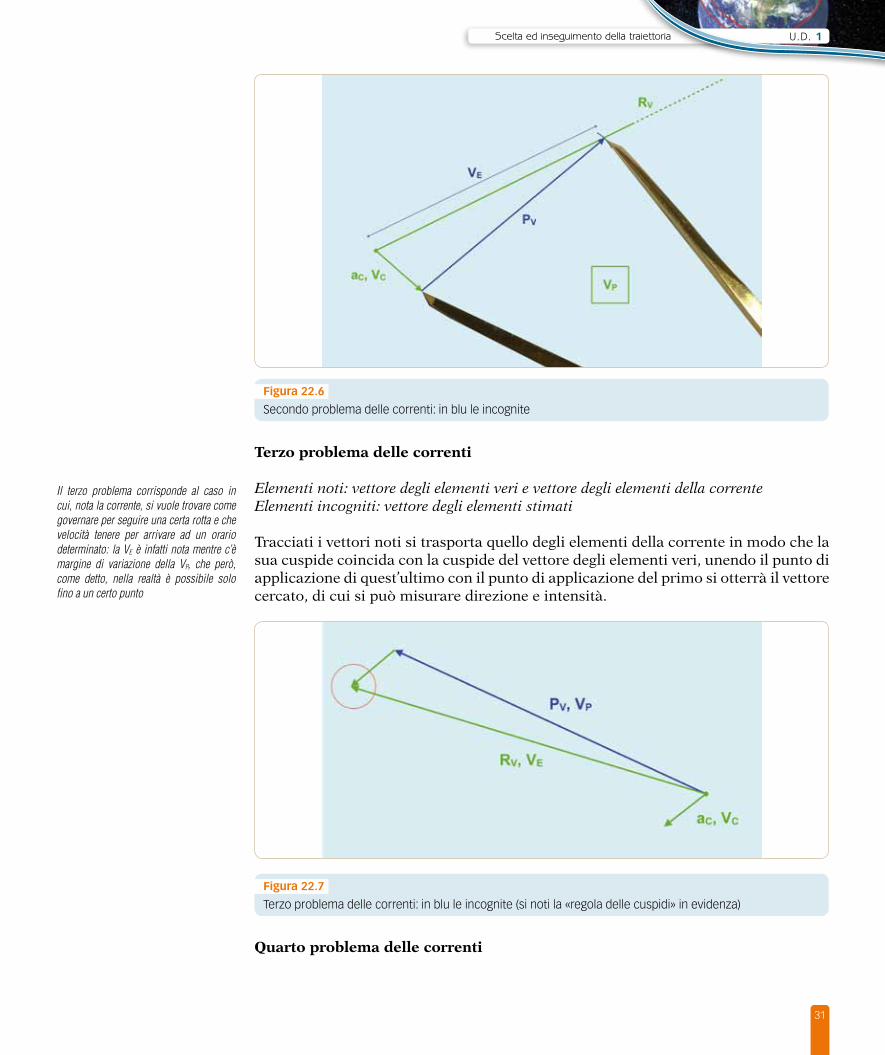
Secondo problema delle correnti
Elementi noti: RV, VP e vettore degli elementi della correnteElementi incogniti: PV, VE
La rotta si può tracciare solo come semiretta in quanto la velocità effettiva, che si misura lungo tale direzione, è incognita; è nota però la velocità di propulsione che rappresenta la lunghezza del vettore sottrazione tra VE e VC, per cui è sufficiente aprire il compasso con ampiezza VP, puntare sulla cuspide del vettore degli elementi della corrente e «tagliare» la semiretta che rappresenta la rotta: la direzione trovata corri-sponderà a PV, mentre la lunghezza individuata sulla rotta sarà la VE.
Il secondo problema è forse quello di co-struzione più complessa ma anche il più utile, infatti esso coinvolge elementi di-sgiunti, cioè sono noti, oltre al vettore della corrente, la direzione di un vettore (RV) e l’intensità dell’altro (VP); in effetti le navi hanno solitamente rotta e velocità di pro-pulsione obbligata (ogni nave è progettata per una determinata velocità di servizio)
31
U.D. 1Scelta ed inseguimento della traiettoria
Figura 22.6
Secondo problema delle correnti: in blu le incognite
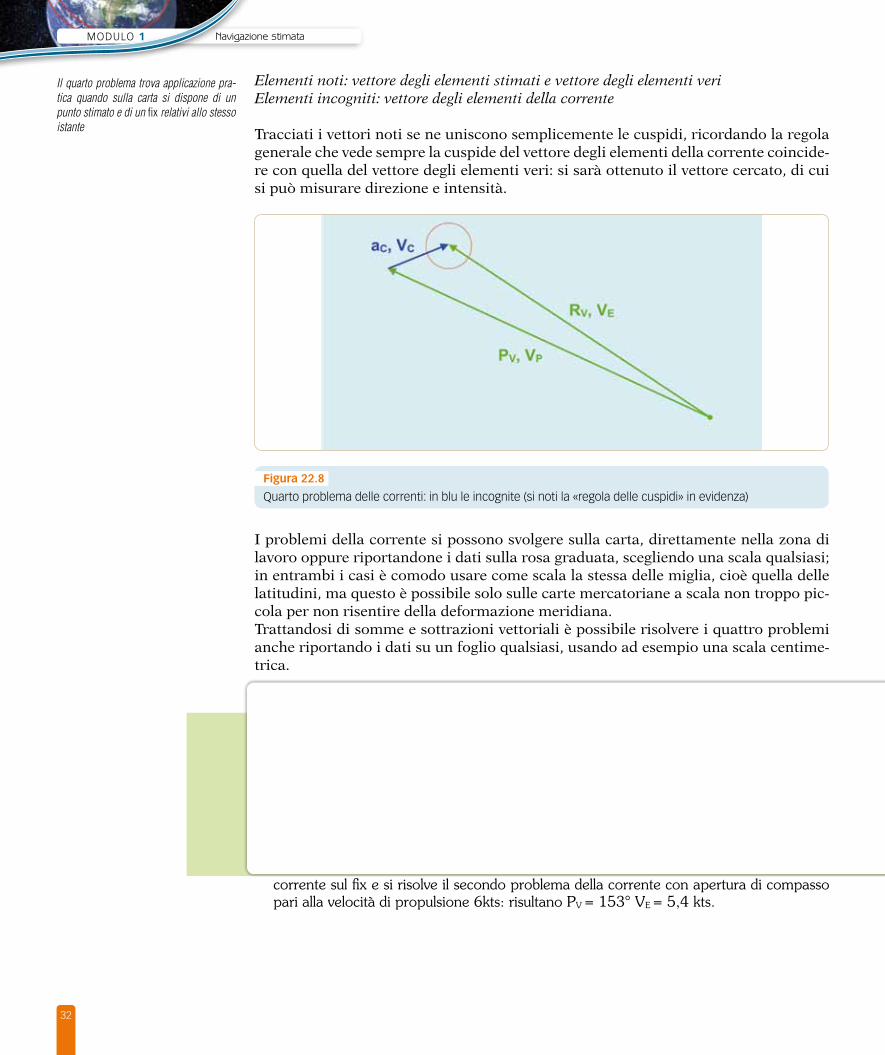
Terzo problema delle correnti
Elementi noti: vettore degli elementi veri e vettore degli elementi della correnteElementi incogniti: vettore degli elementi stimati
Tracciati i vettori noti si trasporta quello degli elementi della corrente in modo che la sua cuspide coincida con la cuspide del vettore degli elementi veri, unendo il punto di applicazione di quest’ultimo con il punto di applicazione del primo si otterrà il vettore cercato, di cui si può misurare direzione e intensità.
Figura 22.7
Terzo problema delle correnti: in blu le incognite (si noti la «regola delle cuspidi» in evidenza)
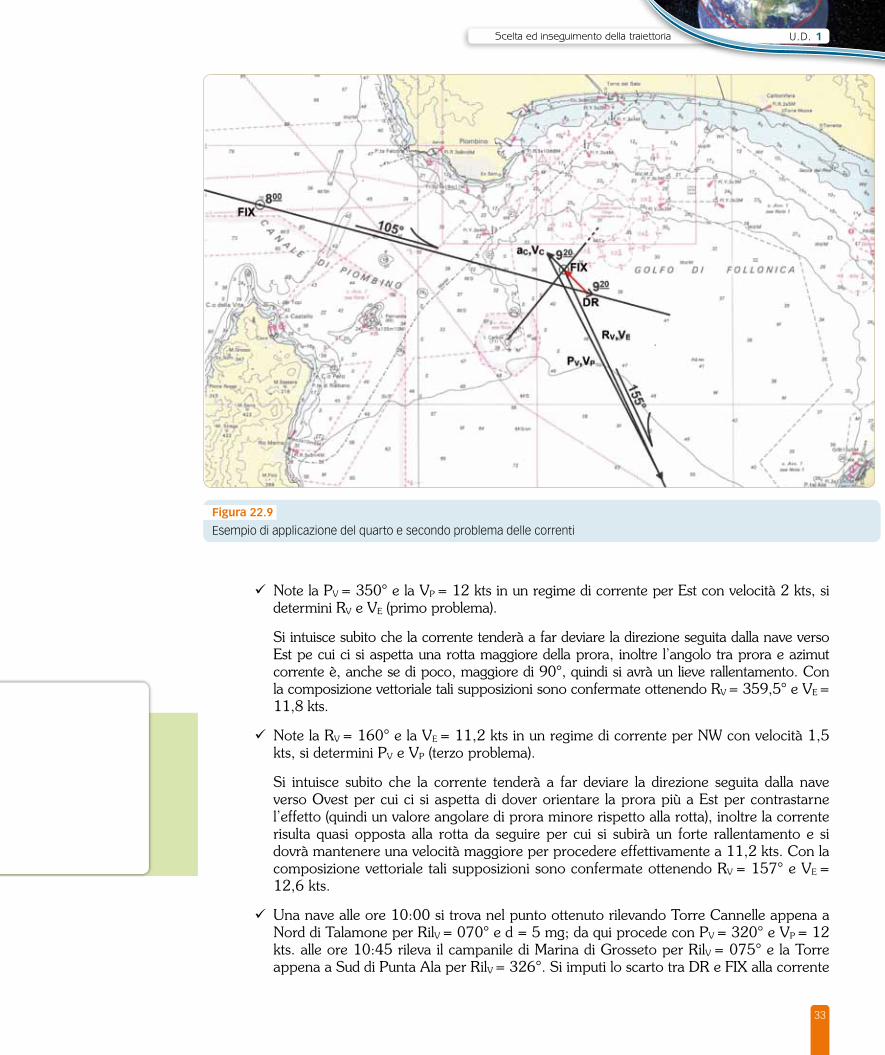
Quarto problema delle correnti
Il terzo problema corrisponde al caso in cui, nota la corrente, si vuole trovare come governare per seguire una certa rotta e che velocità tenere per arrivare ad un orario determinato: la VE è infatti nota mentre c’è margine di variazione della VP, che però, come detto, nella realtà è possibile solo fino a un certo punto
32
MoDUlo 1 Navigazione stimata
Elementi noti: vettore degli elementi stimati e vettore degli elementi veriElementi incogniti: vettore degli elementi della corrente
Tracciati i vettori noti se ne uniscono semplicemente le cuspidi, ricordando la regola generale che vede sempre la cuspide del vettore degli elementi della corrente coincide-re con quella del vettore degli elementi veri: si sarà ottenuto il vettore cercato, di cui si può misurare direzione e intensità.
Figura 22.8
Quarto problema delle correnti: in blu le incognite (si noti la «regola delle cuspidi» in evidenza)
I problemi della corrente si possono svolgere sulla carta, direttamente nella zona di lavoro oppure riportandone i dati sulla rosa graduata, scegliendo una scala qualsiasi; in entrambi i casi è comodo usare come scala la stessa delle miglia, cioè quella delle latitudini, ma questo è possibile solo sulle carte mercatoriane a scala non troppo pic-cola per non risentire della deformazione meridiana.Trattandosi di somme e sottrazioni vettoriali è possibile risolvere i quattro problemi anche riportando i dati su un foglio qualsiasi, usando ad esempio una scala centime-trica.
EsempiüUna nave sta seguendo una rotta di 105° a Nord dell’Isola d’Elba, con velocità VP = 6
kts, e alle ore 8:00 si trova nella posizione osservata (j = 42°54,7’ N; = 010°25,0’ E). Alle ore 9:20 si controlla la posizione rilevando la Torre di Isola Cerboli per RilV = 220° e d = 2 mg (distanza presa al radar, quindi contata dalla costa); dal confronto tra punto nave (FIX) e punto stimato (DR), che risulta a 8 mg dal punto delle 8:00, si rileva uno spostamento per 315° di 0,8 mg che si imputa alla corrente (quarto problema), i cui dati, ricordando che la traslazione è riferita ad una base temporale di 1h20m saranno aC = 315° VC = 0,6 kts (da 0,8/1°20’ = 0,6). I dati della corrente si possono ora utilizzare per pianificare il nuovo leg che prevede di seguire una rotta di 155°, si riporta quindi il vettore corrente sul fix e si risolve il secondo problema della corrente con apertura di compasso pari alla velocità di propulsione 6kts: risultano PV = 153° VE = 5,4 kts.
Il quarto problema trova applicazione pra-tica quando sulla carta si dispone di un punto stimato e di un fix relativi allo stesso istante
33
U.D. 1Scelta ed inseguimento della traiettoria
Elementi noti: vettore degli elementi stimati e vettore degli elementi veriElementi incogniti: vettore degli elementi della corrente
Tracciati i vettori noti se ne uniscono semplicemente le cuspidi, ricordando la regola generale che vede sempre la cuspide del vettore degli elementi della corrente coincide-re con quella del vettore degli elementi veri: si sarà ottenuto il vettore cercato, di cui si può misurare direzione e intensità.
I problemi della corrente si possono svolgere sulla carta, direttamente nella zona di lavoro oppure riportandone i dati sulla rosa graduata, scegliendo una scala qualsiasi; in entrambi i casi è comodo usare come scala la stessa delle miglia, cioè quella delle latitudini, ma questo è possibile solo sulle carte mercatoriane a scala non troppo pic-cola per non risentire della deformazione meridiana.Trattandosi di somme e sottrazioni vettoriali è possibile risolvere i quattro problemi anche riportando i dati su un foglio qualsiasi, usando ad esempio una scala centime-trica.
EsempiüUna nave sta seguendo una rotta di 105° a Nord dell’Isola d’Elba, con velocità VP = 6
kts, e alle ore 8:00 si trova nella posizione osservata (j = 42°54,7’ N; = 010°25,0’ E). Alle ore 9:20 si controlla la posizione rilevando la Torre di Isola Cerboli per RilV = 220° e d = 2 mg (distanza presa al radar, quindi contata dalla costa); dal confronto tra punto nave (FIX) e punto stimato (DR), che risulta a 8 mg dal punto delle 8:00, si rileva uno spostamento per 315° di 0,8 mg che si imputa alla corrente (quarto problema), i cui dati, ricordando che la traslazione è riferita ad una base temporale di 1h20m saranno aC = 315° VC = 0,6 kts (da 0,8/1°20’ = 0,6). I dati della corrente si possono ora utilizzare per pianificare il nuovo leg che prevede di seguire una rotta di 155°, si riporta quindi il vettore corrente sul fix e si risolve il secondo problema della corrente con apertura di compasso pari alla velocità di propulsione 6kts: risultano PV = 153° VE = 5,4 kts.
Il quarto problema trova applicazione pra-tica quando sulla carta si dispone di un punto stimato e di un fix relativi allo stesso istante
Figura 22.9
Esempio di applicazione del quarto e secondo problema delle correnti
üNote la PV = 350° e la VP = 12 kts in un regime di corrente per Est con velocità 2 kts, si determini RV e VE (primo problema).
Si intuisce subito che la corrente tenderà a far deviare la direzione seguita dalla nave verso Est pe cui ci si aspetta una rotta maggiore della prora, inoltre l’angolo tra prora e azimut corrente è, anche se di poco, maggiore di 90°, quindi si avrà un lieve rallentamento. Con la composizione vettoriale tali supposizioni sono confermate ottenendo RV = 359,5° e VE = 11,8 kts.
üNote la RV = 160° e la VE = 11,2 kts in un regime di corrente per NW con velocità 1,5 kts, si determini PV e VP (terzo problema).
Si intuisce subito che la corrente tenderà a far deviare la direzione seguita dalla nave verso Ovest per cui ci si aspetta di dover orientare la prora più a Est per contrastarne l’effetto (quindi un valore angolare di prora minore rispetto alla rotta), inoltre la corrente risulta quasi opposta alla rotta da seguire per cui si subirà un forte rallentamento e si dovrà mantenere una velocità maggiore per procedere effettivamente a 11,2 kts. Con la composizione vettoriale tali supposizioni sono confermate ottenendo RV = 157° e VE = 12,6 kts.
üUna nave alle ore 10:00 si trova nel punto ottenuto rilevando Torre Cannelle appena a Nord di Talamone per RilV = 070° e d = 5 mg; da qui procede con PV = 320° e VP = 12 kts. alle ore 10:45 rileva il campanile di Marina di Grosseto per RilV = 075° e la Torre appena a Sud di Punta Ala per RilV = 326°. Si imputi lo scarto tra DR e FIX alla corrente
34
MoDUlo 1 Navigazione stimata
e se ne determinino gli elementi (quarto problema).
Dal confronto tra punto vero e punto stimato, che risulta a 9 mg dal punto delle 10:00, si rileva uno spostamento per 342° di 1,7 mg che si imputa alla corrente, i cui dati, ricordando che la traslazione è riferita ad una base temporale di 45m saranno aC = 342° VC = 2,3 kts (da 1,7/0°45’ = 2,3).
NB: risoluzione mostrata nel video proposto come estensione on-line
22.4effettocoMbinatodiventoecorrenteQualora fossero presenti entrambi i disturbi meteomarini, a livello puramente dire-zionale vale la relazione algebrica 22.4, tuttavia è bene risolvere i problemi di deter-minazione dei nuovi elementi del moto considerando separatamente vento e corrente.
RV = PV + lsc + ldr 22.4
Se si disponesse di vettori completamente definiti sia per il moto di deriva sia per il moto di scarroccio, essi si potrebbero comporre ed effettuare un’unica risoluzione grafica con i criteri visti nel precedente paragrafo, ma questo non è possibile perché l’effetto del vento, come detto, dipende da diverse variabili.
Il procedimento generalmente adottato prevede di suddividere i problemi in due casi generali:
1) quando si vuole passare dagli elementi stimati a quelli veri, cioè trovare che rotta e che velocità si terranno effettivamente data una certa prora e una certa velocità di propulsione si considera prima l’effetto del vento e poi quello della corrente;
2) quando si vuole passare dagli elementi veri a quelli stimati, cioè trovare che prora e che velocità di propulsione tenere per seguire una data rotta a una data velocità si considera prima l’effetto della corrente e poi quello del vento.
Nel primo caso, nota la direzione di provenienza del vento e la stima dell’angolo di scarroccio, si considererà l’effetto del vento come illustrato in figura 22.4, ottenendo RVS e VS; essi sostituiranno il vettore degli elementi stimati nella successiva applica-zione del primo problema delle correnti, da cui si determineranno facilmente RV e VE.
35
U.D. 1Scelta ed inseguimento della traiettoria
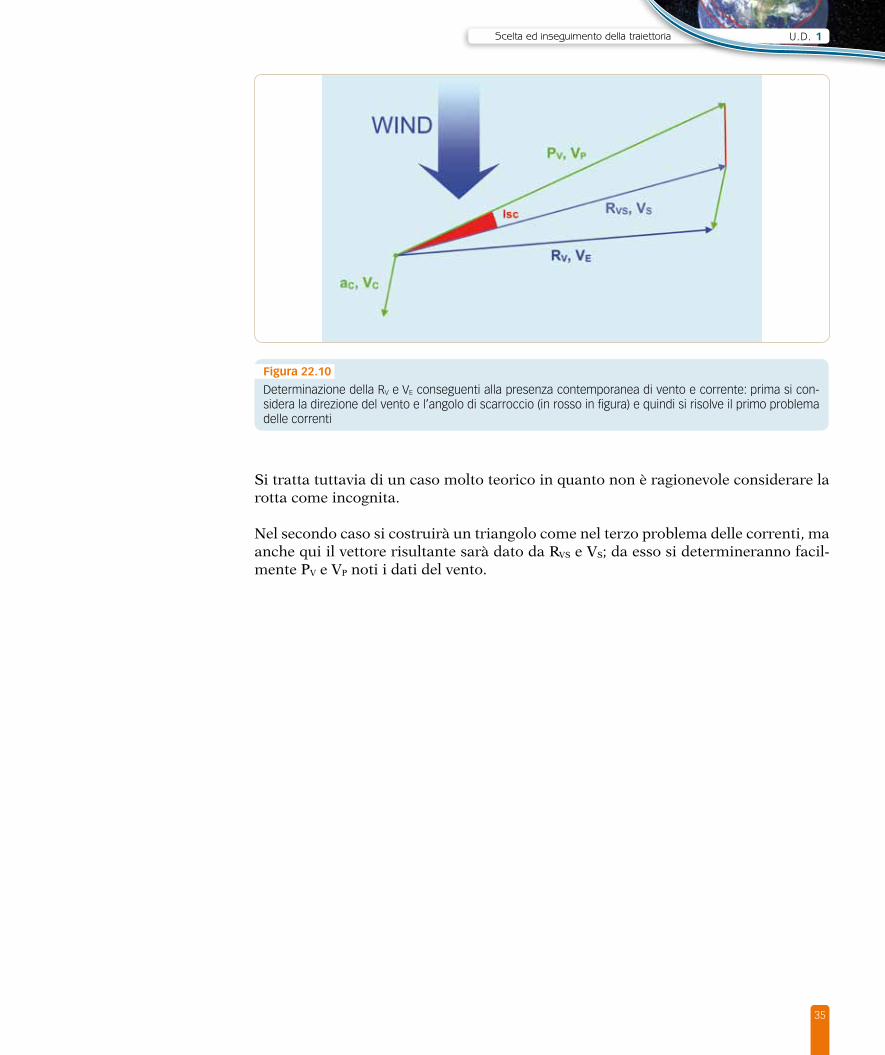
Figura 22.10
Determinazione della RV e VE conseguenti alla presenza contemporanea di vento e corrente: prima si con-sidera la direzione del vento e l’angolo di scarroccio (in rosso in figura) e quindi si risolve il primo problema delle correnti
Si tratta tuttavia di un caso molto teorico in quanto non è ragionevole considerare la rotta come incognita.
Nel secondo caso si costruirà un triangolo come nel terzo problema delle correnti, ma anche qui il vettore risultante sarà dato da RVS e VS; da esso si determineranno facil-mente PV e VP noti i dati del vento.
36
MoDUlo 1 Navigazione stimata
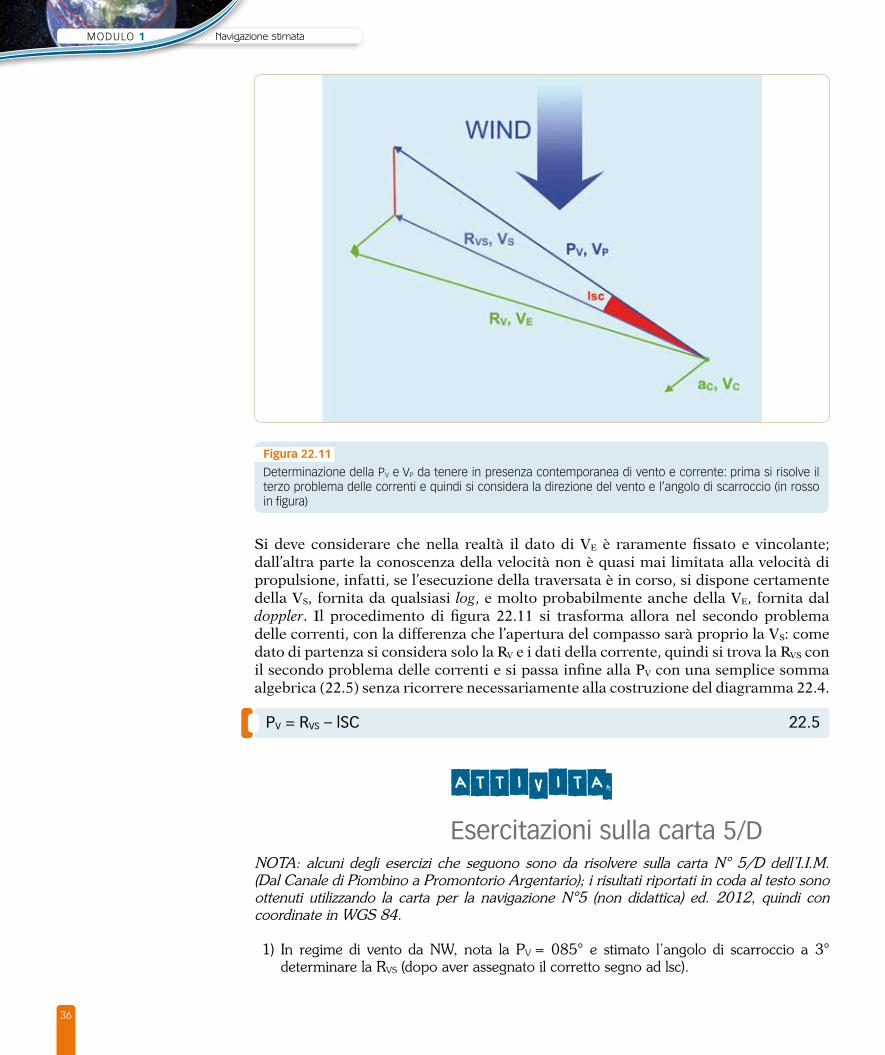
Figura 22.11
Determinazione della PV e VP da tenere in presenza contemporanea di vento e corrente: prima si risolve il terzo problema delle correnti e quindi si considera la direzione del vento e l’angolo di scarroccio (in rosso in figura)
Si deve considerare che nella realtà il dato di VE è raramente fissato e vincolante; dall’altra parte la conoscenza della velocità non è quasi mai limitata alla velocità di propulsione, infatti, se l’esecuzione della traversata è in corso, si dispone certamente della VS, fornita da qualsiasi log, e molto probabilmente anche della VE, fornita dal doppler. Il procedimento di figura 22.11 si trasforma allora nel secondo problema delle correnti, con la differenza che l’apertura del compasso sarà proprio la VS: come dato di partenza si considera solo la RV e i dati della corrente, quindi si trova la RVS con il secondo problema delle correnti e si passa infine alla PV con una semplice somma algebrica (22.5) senza ricorrere necessariamente alla costruzione del diagramma 22.4.
PV = RVS – lSC 22.5
AttivitA’Esercitazioni sulla carta 5/D
NOTA: alcuni degli esercizi che seguono sono da risolvere sulla carta N° 5/D dell’I.I.M. (Dal Canale di Piombino a Promontorio Argentario); i risultati riportati in coda al testo sono ottenuti utilizzando la carta per la navigazione N°5 (non didattica) ed. 2012, quindi con coordinate in WGS 84.
1) In regime di vento da NW, nota la PV = 085° e stimato l’angolo di scarroccio a 3° determinare la RVS (dopo aver assegnato il corretto segno ad lsc).
37
U.D. 1Scelta ed inseguimento della traiettoria
2) In regime di vento da SE, nota la PV = 000° e stimato l’angolo di scarroccio a 4° determinare la RVS (dopo aver assegnato il corretto segno ad lsc).
3) In regime di vento da W, nota la RVS = 045° e stimato l’angolo di scarroccio a 3° determinare la PV da tenere (dopo aver assegnato il corretto segno ad lsc).
4) In regime di vento da N, nota la RVS = 280° e stimato l’angolo di scarroccio a 4° determinare la PV da tenere (dopo aver assegnato il corretto segno ad lsc).
5) In regime di vento da NW, nota la PV = 060°, VP = 7,1 kts e stimato l’angolo di scarroccio a 5° determinare RVS e VS (dopo aver assegnato il corretto segno ad lsc).
6) In regime di vento da E, note PV = 225°, VP = 8,4 kts e stimato l’angolo di scarroccio a 3° determinare RVS e VS (dopo aver assegnato il corretto segno ad lsc).
7) In regime di vento da N, dovendo percorrere una RVS = 070° con VS = 7 kts e stimato l’angolo di scarroccio a 4° determinare la PV e la VP da tenere (dopo aver assegnato il corretto segno ad lsc).
8) In regime di vento da NE, dovendo percorrere una RVS = 160° con VS = 8,3 kts e stimato l’angolo di scarroccio a 3° determinare la PV e la VP da tenere (dopo aver assegnato il corretto segno ad lsc).
9) In regime di vento da SW, dovendo percorrere una RVS = 270° con VS = 10,2 kts e stimato l’angolo di scarroccio a 5° determinare la PV e la VP da tenere (dopo aver assegnato il corretto segno ad lsc).
10) Una nave si trova in (j = 42°30,0’ N; = 010°43,7’ E) ed è diretta a Piombino (riferimento fanale rosso); è presente un vento da W per il quale si valuta un angolo di scarroccio di lsc = +4°. Determinare la RV e la PV da seguire
11) Una nave si trova in (j = 42°38,8’ N; = 009°57,0’ E) e si muove con PV = 018°; più tardi si effettua il punto nave rilevando il faro di Punta Polveraia (costa Ovest dell’Elba) per RilV = 101° e d = 4,4 mg; è presente un vento da S. Determinare la RV seguita ed il conseguente valore di lsc.
12) Uno Yacht si trova nel punto definito da RilV = 138° e d = 4,8 mg da Scoglio Africa ed è diretto a Castiglione della Pescaia (riferimento fanale di ingresso); è presente un vento di scirocco per il quale si valuta un angolo di scarroccio di lsc = -5°. Determinare la RV e la PV da seguire.
13) Noti PV = 145°, VP = 12 kts, aC = 180°, VC = 1,2 kts determinare RV e VE.14) Noti PV = 260°, VP = 11 kts, aC = 315°, VC = 0,8 kts determinare RV e VE.15) Noti RV = 120°, VP = 15 kts, aC = 045°, VC = 1,5 kts determinare PV e VE.16) Noti RV = 045°, VP = 8 kts, aC = 000°, VC = 2,0 kts determinare PV e VE.17) Noti RV = 350°, VP = 10 kts, aC = 270°, VC = 1,6 kts determinare PV e VE.18) Noti RV = 012°, VP = 7,6 kts, aC = 090°, VC = 0,6 kts determinare PV e VE.19) Noti RV = 270°, VE = 10,4 kts, aC = 010°, VC = 1,8 kts determinare PV e VP.20) Noti RV = 332°, VE = 13 kts, aC = 225°, VC = 1,0 kts determinare PV e VP.21) Noti PV = 080°, VP = 13,2 kts, RV = 087°, VE = 11,2 kts determinare aC, VC.22) Noti PV = 213°, VP = 14,6 kts, RV = 215°, VE = 14,0 kts determinare aC, VC.23) Sono note DR position (j = 42°37,4’ N; = 010°25,1’ E) e FIX position (j = 42°38,4’ N; = 010°23,4’ E) dopo una
navigazione di 1h20m dall’ultimo punto certo; imputare lo scarto alla corrente e determinare aC, VC.24) Sono note DR position (j = 42°30,0’ N; = 010°50,0’ E) e FIX position (j = 42°28,1’ N; = 010°48,1’ E) dopo una
navigazione di 2h25m dall’ultimo punto certo; imputare lo scarto alla corrente e determinare aC, VC.25) Una nave si trova a Nord del faro di Punta Polveraia, ad una distanza da esso di 6,5 mg e deve muoversi con una
RV = 090°; è nota la sua VP = 10 kts. Sapendo che in zona è presente una corrente per 315° con intensità 1,0 kts, determinare PV da tenere e VE.
26) Una nave si trova nella posizione individuata dal RilV = 045° e d = 7mg dal faro di Formica Grande e deve muoversi con una rotta che passa 2,2 mg a Nord di Punta del Marchese (Isola Pianosa); è nota la sua VP = 11,5 kts. Sapendo che in zona è presente una corrente per 340° con intensità 1,8 kts, determinare PV da tenere e VE.
27) Una nave alle 15:45 si trova nella posizione individuata dal RilV = 227° e d = 5mg dal faro di Punta del Fenaio (Isola del Giglio) e deve raggiungere Rio Marina (Isola d’Elba) entro le 18:30; sapendo che in zona è presente una corrente per Nord con intensità 1,6 kts, determinare PV e VP da tenere.
28) Una nave alle 5:30 si trova 1 mg a Nord del faro di Formica Grande, e dirige con PV = 280° e VP = 12,2 kts; alle 7:30 si fa il punto nave rilevando Capo di Poro con RilV = 320° e Isola Corbelli con RilV = 065° (entrambi sulla costa Sud dell’Elba). Trovare gli elementi della corrente dal confronto tra punto stimato e punto vero.
29) Una nave alle 17:15 si trova nella posizione individuata dal RilV = 302° e d = 6mg di Isola Corbelli (costa Sud dell’Elba) al, e dirige con PV = 048° e VP = 7,2 kts; alle 18:30 si fa il punto nave rilevando Isola Cerboli con RilV = 333° e Scoglio
38
MoDUlo 1 Navigazione stimata
dello Sparviero (Punta Ala) con RilV = 073°. Trovare gli elementi della corrente dal confronto tra punto stimato e punto vero.
30) Una nave avente PV = 340° e VP = 12 kts è soggetta ad un vento da E per il quale si valuta lsc = -3°; in zona è presente una corrente con aC = 000° e VC = 1 knt; determinare RVS, VS, RV e VE.
31) Una nave avente PV = 340° e VP = 12 kts è soggetta ad un vento da SW per il quale si valuta lsc = +4°; in zona è presente una corrente con aC = 045° e VC = 2,2 kts; determinare RVS, VS, RV e VE.
32) Una nave deve seguire RV = 148° con una VE = 13 kts, ma è soggetta ad un vento da NE per il quale si valuta lsc = +5°; in zona è presente una corrente con aC = 270° e VC = 1,2 kts; determinare RVS, VS, PV e VP.
33) Una nave deve seguire RV = 030° con una VE = 10,5 kts, ma è soggetta ad un vento da N per il quale si valuta lsc = +3°; in zona è presente una corrente con aC = 315° e VC = 2 kts; determinare RVS, VS, PV e VP.
34) Una nave deve seguire RV = 090°, ma è soggetta ad un vento da S per il quale si valuta lsc = -5°; in zona è presente una corrente con aC = 315° e VC = 1,6 kts; sapendo che la lettura al log fornisce VS = 12,4 kts, determinare RVS, PV da seguire e VE.
35) Una nave deve seguire RV = 170°, ma è soggetta ad un vento da SE per il quale si valuta lsc = +2°; in zona è presente una corrente con aC = 090° e VC = 2,4 kts; sapendo che la lettura al log fornisce VS = 13,6 kts, determinare RVS, PV da seguire e VE.
AttivitA’Esercitazioni sulla carta 5/D
3) Uno Yacht parte dal suo punto di fonda a Marina di Grosseto (j = 42°42,4ʹ N l = 010°58,4ʹ E), alle ore 9:20, diretto a Portoferraio, sull’Isola d’Elba. La velocità di propulsione è 11,6 knt e inizialmente si governa per Pb=275°.
Alle 10:28 si rileva Scoglio dello Sparviero per Rilb = 046° e distanza pari a 2,4 mg. Determinare gli elementi della corrente agente.
Dal fix si dirige per passare tra Isola Palmaiola e Isola Cerboli, a 0,8 mg dalla costa SW di quest’ultima, mantenendo stessa VP. Determinare RV, PV, Pb VE.
Alle 11:16 si controlla la posizione osservando il faro di Isola Palmaiola al traverso a d = 0,7 mg. Commentare la condotta della navigazione.
Si prosegue sulla stessa rotta fino a scoprire il faro di Punta Capo Bianco, puntandovi quando lo si osserva al traverso. Determinare ora accostata, RV, Pb ed ETA considerando che dopo aver attraversato il Canale di Piombino la corrente è diventata trascurabile.
5) Una nave si trova a Sud del Golfo di Follonica e sta navigando con Pb = 169° e VP = 8,5 kts; alle ore 9:00 si effettua il punto nave rilevando la torre di Scoglio dello Sparviero per Rilb = 063° e il faro di Rio Marina per Rilb = 297°; dopo aver determinato le coordinate del PN procede con verso la sua destinazione che è Giglio Porto (Isola del Giglio), dirigendo per passare a 0,8 mg dalla Secca della Croce; determinare la PV da seguire. Alle ore 11:00 si fa il punto rilevando il faro delle Formiche di Grosseto con il metodo del 45-traverso (r = -45° alle ore 10:38 e r = -90° alle ore 11:00): determinare coordinate del punto vero e gli elementi della corrente a cui si imputa lo scarto tra DR e FIX.
Dal punto nave si prosegue dirigendo per passare al traverso di Punta Lazzaretto ad una distanza di 0,5 mg: determinare la nuova RV, PV e Pb da seguire tenendo in considerazione la corrente trovata, la VE e l’ETA a detto traverso, da cui poi si entrerà in porto.
8) Una nave diretta a Porto Santo Stefano si trova in navigazione lungo il litorale grossetano con Pb = 159° e Vp = 8,4 kts, nel punto definito dai seguenti rilevamenti (ore 10:20): campanile di Castiglione della Pescaia per Rilb = 012° e campanile di marina di Grosseto per Rilb = 065°. Trovare le coordinate del punto nave.
Da qui si accosta per la destinazione (Porto Santo Stefano) a cui si vuol giungere alle ore 13:00 (punto di riferimento 1 mg a Nord del fanale verde di ingresso nel porto); in zona agisce una corrente per Nord con VC = 1,5 kts e un vento da W per il quale si valuta lsc = -3°. Determinare Rv, VE, RVS, VS, PV, Pb e VP.
Alle ore 12:20 si controlla la posizione rilevando la torre di Capo d’Uomo per r=-100° (traverso della rotta) a d = 4,2 mg; commentare il confronto tra punto vero e stimato.
39
U.D. 1Scelta ed inseguimento della traiettoria
9) Si pianifica il tratto di navigazione nell’arcipelago toscano della traversata tra Napoli e Bastia; si intende passare a W dell’Isola del Giglio e poi transitare tra l’Elba e Pianosa.
Il WP di riferimento di entrata nella carta N°5 (WP4) è in (j = 42°20’N; l = 010°40’E) e da qui si deve tenere una rotta di RV = 310° fino al WP successivo (WP5), individuato nel punto di transito a Nord del faro dell’Isola Pianosa della stessa rotta, da cui si accosterà per Bastia. L’ETA al WP4 è 05:24 e si deve rispettare la VE = 14 kts per garantire la puntualità richiesta.
Nella zona è segnalata una corrente per 340° con VC = 1,8 kts ed è previsto un vento di libeccio per il quale si ipotizza lsc = +4°. Determinare Rvs, VS, PV, Pb e VP ed ETA al WP5.
Si predispongono anche i dati per effettuare un controllo della posizione lungo il tratto con il metodo del 45-traverso applicato al faro dell’Isola Pianosa; si determinino gli istanti in cui si prevedono le posizioni di rilevamento e i relativi rilevamenti polari (considerando che a causa della non coincidenza della prora con la rotta non saranno -45° e -90° ma altri valori).