-
2.04A Class Project: the Tower
with Active Damping
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 1
-
Problem Wind loading of skyscrapers causes tall building
sway.
Upper floor occupants suffer from motion sickness when the
building sways in the wind since people are sensitive to
accelerations as small as 0.05 m/s2 (0.005 g).
Too much building sway can also lead to long-term structural
damage.
The Hancock Tower in Boston had a problem with falling windows.
(The Hancock Tower now has two passively controlled 300 ton sliding
masses on the 58th floor.)
+ = Courtesy of Rob Pongsajapan on flickr. CC-BY
&DUWRRQVVRXUFHVXQNQRZQ$OOULJKWVUHVHUYHG7KLVFRQWHQWLVH[FOXGHGIURPRXU&UHDWLYH&RPPRQVOLFHQVH)RUPRUHLQIRUPDWLRQVHHKWWSRFZPLWHGXKHOSIDTIDLUXVH
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 2
-
Simplified Building Model
We can model a tall building as a singledegree of freedom
lumped-parameter system.
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 3
-
Passive Vibration Damping
Sliding Mass, m2
Spring
Damper
Wind force, One way to stabilize these Fw(t) tall builds from
swaying too much during earthquakes or from high winds is to
install enormous pendulum weights. When the building sways sideways
the pendulum doesn't want to move (inertia) and exerts a pull in
the opposite direction.
Passive Damper (Tuned Mass Damper)
Ground
2.04A Spring 13 Lecture 16&17 March 12&14 (Tue-Thu)
4
-
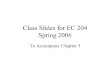
Skyscrapers Burj Khalifa Skyscraper became the tallest building
(828 meters or 2,717 feet) in the world when it was officially
opened on 4th January 2010.
TIME Diagram by Joe Lertola Time, Inc. All rights reserved. This
content is excluded from ourCreative Commons license. For more
information, see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 5
-
Burj Khalifa (http://www.burjkhalifa.ae/)
Burj Khalifa
Taipei 101
Courtesy of Natalie of designedbynatalie.com. CC-BY-NC
Courtesy of ADTeasdale on flickr. CC-BY
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 6
-
Taipei 101 (http://www.taipei-101.com.tw)
Courtesy of Jirka Matousek on flickr. CC-BY
Courtesy of Stefan Tan. Used with permission.
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 7
-
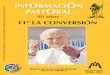
The Tuned Mass Damper in Taipei 101
The passive wind damper with a diameter of 5.5 meters and
weighting 660 metric tons, is also the largest in the world
now.
Taipei Financial Center Corp. All rights reserved. This
contentis excluded from our Creative Commons license. For
moreinformation, see http://ocw.mit.edu/help/faq-fair-use/.
Courtesy of Daniel M. Shih. Used with permission.
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 8
-
Active Damper Design
Sliding Mass, m2 controller sensor
Wind force, Fw(t)
The actuator is commanded by a control system, which requires
sensor feedback
Spring
Damper
actuator
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 9
-
Experimental System
air-bearingsvoice-coils
wire spring
accelerometer tall building
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 10
-
Lecture 09 Wednesday, Feb. 27 2.004 Spring 13 11
-
Available Impulse Response Data (Course Lockers\2.004\Labs\Tower
Data)
Building Response Damper Response
B1 and K1 B2 and K2
Compare your transfer function impulse response to this one.
Open Loop System Response
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 12
-
Estimating Parameters (Building)
= ln x1 x2
= 1
N 1 ln x1 xN
Logarithmic decrement method
Damped period
Determine after 36.8% amplitude decay
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27
13
-
Estimating Parameters (Damper)
2.004 Spring 13 Lecture 09 Wednesday, Feb. 27 14
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and Controls Spring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
MASSACHUSETTS INSTITUTE OF TECHNOLOGY DEPT OF MECHANICAL
ENGINEERING
2.004 Dynamics and Control II
Laboratory Note: Description of the Experimental Rotational
Plant1
INTRODUCTION
In the first series of 2.004 laboratory experiments you will be
designing and testing various schemes for controlling the velocity
and position of a rotational flywheel. This handout introduces you
to the experimental plant. You should study the handout before the
first lab session. We will be referring to this handout throughout
the term. DESCRIPTION OF HARDWARE The rotary inertia (flywheel):
Figure 1 is a photograph of the rotational flywheel that you will
be using. It consists of a large metal (copper) flywheel which
rides in high quality ball bearings. The lower bearing is an
angular contact type of bearing. These bearings are designed to
taking thrust loads, and in this case the lower bearing supports
the full weight of the flywheel. The upper bearing is a
conventional ball bearing. The bearings have very low friction: if
you set this flywheel rotating it will typically take several
minutes to come to a stop.
Figure 1. The copper flywheel and bearings.
Magnet in place for eddy current damping
Magnet in storage location
Copper Flywheel
1 The hardware described here was developed by Prof. E Sachs.
These notes are based upon notes prepared by Prof. Sachs.
Upper bearing is recessed in this hole
-
In the experiments we will add linear (viscous) damping to the
system using a phenomenon knows as eddy-current damping. When a
permanent magnet (see Fig. 1above) is moved across the surface of
an electrical conductor it induces internal currents in the
material (eddy currents), which in turn create a magnetic field
that opposes the original field (re-read Lenzs law from 8.02). The
result is a force on the magnet proportional to the relative
velocity of magnet and metal, in a direction which opposes the
motion. It therefore requires work to maintain motion between the
magnet and the conductor. Energy is dissipated in the conductor as
heat (i2R losses), and the effect is that the eddy-current forces
appear as a dissipative frictional force.
Our flywheel is made of copper, for several reasons:
1) Copper is highly electrically conductive, and therefore large
eddy-currents can be induced in it, 2) Copper is non-magnetic which
is important because ferromagnetic forces would overwhelm the
eddy-current forces, and, 3) Copper has a high physical density
with the result that our flywheel is massive (has a large moment of
inertia). You will be provided with several magnets, which may be
placed under the rim of the flywheel to achieve a range of damping
coefficients. The dimensions of the copper flywheel are shown below
In Fig. 2. All dimensions are in inches. The density of copper is
8,230 kg/m3.
Figure 3. Dimensions of the copper flywheel.
Attached to the shaft, under the flywheel, is an optical rotary
encoder, shown in
Fig. 3. This consists of a transparent plastic disk, scribed
with 1,024 radial lines. As the disk rotates, these lines interrupt
a light beam, and are recorded electronically as a sequence of
pulses. Specialized electronics (US Digital ETACH and EDAC2
modules) are used to compute either the angular velocity of the
shaft or its angular position. Because there is no mechanical
contact, the encoder adds no friction to the system. You will use
these signals from these modules in your control system
designs.
-
Figure 2. The rotary encoder for measuring angular velocity and
position of the flywheel. The Gear Train: The flywheel will be
driven by a dc electric motor through a step-down gear train, as
shown in Fig. 4. A large gear wheel, with 180 teeth, is attached to
the flywheel shaft, and is driven by a smaller gear with 44 teeth
from the electric motor shaft.
Encoder
Figure 4: Spur gear drive train.
Flywheel drive-shaft with larger gear (180 teeth)
Motor drive-shaft with smaller gear (44 teeth)
-
The Electric Motor: The system is driven by a permanent magnet
dc motor (Maxon 148867). This is a high-quality low-friction 150w,
24 v. dc permanent magnet motor. A specification sheet for the
motor is attached. A flexible shaft coupling is used to connect the
motor to the drive-shaft to minimize the effects of any shaft
misalignment.
Fig. 5 Complete experimental set-up with dc motor.
We will be covering the operation of a dc motor in class, but
for now we can simply assume that the torque produced by a motor is
directly proportional to the current flowing in the windings.
Therefore we can define the torque applied to the flywheel by
specifying the motor current. The complete rotational set-up is
shown in Fig. 5. UPDATED PLANT All the experimental rotational
plants were updated in the summer of 2010 to improve the mechanical
connection between the flywheel and its drive shaft by adding an
aluminum hub on top of the copper flywheel. The updated plant is
shown in Fig. 6. This aluminum hub adds about 0.94 lbs of mass to
the flywheel, which is not significant compared to the weight of
the copper. In addition, the height between the lower and the upper
plate was increased to accommodate the added height of the
flywheel. Two pieces of plexiglass were also added to the long
sides of the upper plate as a safety measure.
Electric motor
Encoder output
Electric cable
Flexible coupling
-
Fig. 6 Updated plant.
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
2.04A System Dynamics and Control
Spring 2013
G. Barbastathis
02/05/2013 2.004 System Dynamics and Control Spring 2013
1
-
System Input Output y(t) Mechanical,
electrical, etc. elements
x(t)
May be scalar or vector May be scalar or vector Usually can be
defined by Usually the user specifies
the user a desired form It is subject to noise (or errors)
Sometimes it can be measured,
others it can not
Described by ordinary differential equations (ODEs) operating on
the input (dynamics) If the ODEs operate on the output as well,
then we refer to it as a feedback system Can be linear or
nonlinear
The purpose of control is to ensure that the output waveform
resembles the waveform desired by the user, despite the systems
dynamics and disturbances by noise
Usually, control requires feedback
2.004 System Dynamics and Control Spring 2013 02/05/2013
2
-
Example1: Hard Disk Drive (HDD)
Speed Control Head-Disk Tracking
02/05/2013 2.004 System Dynamics and Control Spring 2013
Photograph on the right source unknown. All rights reserved.This
content is excluded from our Creative Commons license.For more
information, see http://ocw.mit.edu/help/faq-fair-use/.
Courtesy of Robert Scholten. Used with permission.
3
-
Hard Disk Drives
02/05/2013 2.004 System Dynamics and Control Spring 2013
Youtube user jpstanley0. This work is shared under a Creative
Commons Attribution-NonCommericial-NoDerivs 2.5 License.This
content is excluded from our Creative Commons license. For more
information, see http://ocw.mit.edu/help/faq-fair-use/.
4
-
Example 2: The Segway
http://www.segway.com/
Speed Control Stability Control
02/05/2013 2.004 System Dynamics and Control Spring 2013
Segway. All rights reserved. This content is excluded from our
Creative Commonslicense. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
5
-
Example 3: Manufacturing Automation
http://www.youtube.com/watch?v=iwIzPjS5L6w
02/05/2013 2.004 System Dynamics and Control Spring 2013
KUKA Robotics/Headland Machinery. All rights reserved. This
content is excluded from ourCreative Commons license. For more
information, see http://ocw.mit.edu/help/faq-fair-use/.
6
-
System Classifications
Single vs Multiple Inputs / Single vs Multiple Outputs SISO
(single input - single output)
SIMO MISO MIMO
Feed-forward vs feedback Linear vs nonlinear
02/05/2013 2.004 System Dynamics and Control Spring 2013
7
-
Feedforward vs feedback
Feedforward: acts without taking the output into account
Example: your dishwasher does not measure the
cleanliness of plates during its operation Feedback: the output
is specified by taking
the input into account (somehow)
x(t)y(t)
Plant
Controller
+
02/05/2013 2.004 System Dynamics and Control Spring 2013
8
-
HDD Control System
Michael L. Workman, PhD thesis, Stanford University, 1987.
Karman Tam et al, US Patent 5,412,809
2.004 System Dynamics and Control Spring 2013 02/05/2013
Michael L. Workman. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
IEEE. All rights reserved. This content is excluded from our
Creative Commonslicense. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
The inventors. All rights reserved. This content is excludedfrom
our Creative Commons license. For more information,see
http://ocw.mit.edu/help/faq-fair-use/.Source: Figure 1 of patent US
5412809 A
9
-
2.04A Learning Objectives
Learn the process of modeling linear time-invariant (LTI)
dynamical systems in dual domains: in the time domain using
ordinary differential equations and in the Laplace domain
(s-domain).
Understand the behavior of LTI systems qualitatively and
quantitatively, both in the transient and steady-state regimes, and
appreciate how it impacts the performance of electro-mechanical
systems.
Introduce feedback control and understand, using the s-domain
primarily, how feedback impacts transient and steady-state
performance.
Learn how to design proportional, proportional-integral,
proportional-derivative, and proportional-integral-derivative
feedback control systems meeting specific system performance
requirements.
Introduce qualitatively the frequency response of LTI systems
and how it relates to the transient and steady-state system
performance.
02/05/2013 2.004 System Dynamics and Control Spring 2013
10
-
What you need
8.01 and 8.02 basic behavior of mechanical and electrical
elements
18.03 Linear ordinary differential equations (ODEs) and systems
of ODEs Laplace transforms
2.003/2.03
from a physical description of system, derive the set of ODEs
that describe it
We will review these here as necessary; but please refer back to
your materials from these classes, anticipating the topics that we
cover
02/05/2013 2.004 System Dynamics and Control Spring 2013
11
-
02/05/2013 2.004 System Dynamics and Control Spring 2013
Lab Rules - IMPORTANT!!
You must stay within the designated 2.04A/2.004 lab space
No working on other classes (e.g. your 2.007 project) allowed in
the machine shop
2.678
2.672
ENTER
3-062N
12
-
02/05/2013 2.004 System Dynamics and Control Spring 2013
Lab: Equipment Overview
Oscilloscope
Function Generator
DC Power Supply
Power Amp
Rotational Plant
Data Acquisition Interface Panel
PC
Data Acquisition Hardware:National Instruments PCI-6221
Tachometer
Please read the equipment description before before Thu PM
lab!
13
-
02/05/2013 2.004 System Dynamics and Control Spring 2013
Dynamic System
Input OutputTime VaryingFrequency Dependent
Time VaryingFrequency Dependent
Mechanical, Electrical, Fluid, Thermal
Linear System Theory
Control System Design
Modeling
Real Physical SystemMulti-Domain Ideal ElementsNetwork
Representations
Idealized Representation: Lumped Model
State Variables and LODEs
Resulting Equations of Motion Laplace Transforms
Transfer Function RepresentationsPole Zero Analysis
Frequency Response Analysis
Standard Inputs and Prediction of ResponsesTransient
ResponseBode Diagrams
System Design Changes;Feedback ControlSteady State ErrorsInput
Tracking
Response Shaping
Desired Input - Output Response
Framework for system control
14
-
02/05/2013 2.004 System Dynamics and Control Spring 2013
Example: Car Suspension System modeling
System dynamics (as is)
System Control
Model: ordinary differential equation (ODE)Hardware or other
mathematical representation
Model
Response
Desiredresponse
BMW. All rights reserved. This content is excluded from our
Creative Commonslicense. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
15
-
02/05/2013 2.004 System Dynamics and Control Spring 2013
Physical realization of systems
Mechanical Electrical Fluid Thermal Electromechanical
Mechano-fluid Electro-thermal Electromechanicalfluidthermal
16
-
02/05/2013 2.004 System Dynamics and Control Spring 2013
Complex Interconnected Systems?
Combine Mechanical, Electrical Fluid and Thermal
Common Modeling Method Linear, Lumped Parameter
Circuit-Like Analysis:
Common Analytical Tools Linear System Theory
Powerful Design Tools Feedback Control
2.12, 2.14, 2.151
source unknown. All rights reserved. This content is excluded
from our CreativeCommons license. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
17
-
02/05/2013 2.004 System Dynamics and Control Spring 2013
Dynamic System
Input Output
Mechanical, Electrical, Fluid, Thermal
Control System Design
Linear System Theory
Modeling
Real Physical SystemMulti-Domain Ideal ElementsNetwork
Representations
Idealized Representation: Lumped Model
State Variables and LODEs
Resulting Equations of Motion LaPlace Transforms
Transfer Function RepresentationsPole Zero Analysis
Frequency Response Analysis
Standard Inputs and Prediction of ResponsesTransient
ResponseBode Diagrams
System Design Changes;Feedback ControlSteady State ErrorsInput
Tracking
Response Shaping
Desired Input - Output Response
A simple modeling example
18
-
y1(t) x1(t)
ax1(t)ay1(t) y1(t) + y2(t) x1(t) + x2(t)
ay1(t) + by2(t)
a, b : constant scalar or tensors
02/05/2013 2.004 System Dynamics and Control Spring 2013
Linear Systems Suppose
The system is linear iff
and
Corollary
x2(t) y2(t)
ax1(t) + bx2(t)
19
-
02/05/2013 2.004 System Dynamics and Control Spring 2013
ModelingHardware
Idealized Lumped Parameter Model
mathematical representation
oror
m2m1
k
b
y(t)
time domain equation(s) of motion
X(s)Y (s) =
2ns +n2s2 + 2ns +n2
Laplace domain transfer function
x(t)
x+ a2x + a1x = b2y + b1yODE
x1x2
=a11 a12a21 a22
x1x2
+b1b2
y(t)
y(t) = c1 c2x1x2
State Space
BMW. All rights reserved. This content is excluded from our
Creative Commonslicense. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
20
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
=) md2x
dt2+Kx+ fvx = Ku+ fvu=) m
d2x
dt2= Kx+Ku fvx+ fvu
Car suspension model Mass spring viscous damper system
Model
Force balance
Free body diagram
FK0
Mg
Free body diagram (no motion)
FK0
Mg
force due to spring in equilibrium
force because spring changes length during motion
force due to viscous damping
System ODE : 8
md2x
= FK + Fvdt2 =) md
2x = Kx + Ku fvx+ fvu
FK = -K(x - u) dt2 linear differential >: = -fv(x - u)
equation)
Fv
d2xEquation of motion: =) m + Kx + fvx = Ku + fvudt2
12.004 System Dynamics and Control Spring 2013 02/07/2013
-
General Linear Time-Invariant (LTI) system
dnx dn1x dnx dx dmy dm1y d1yan La1+ an1 + bm1dt n dt n1 + an 2
dt n dt + a0 x = bm dtm dtm1 + Lb1 dt1 + b0u
nth-order Linear Ordinary Differential Equation (ODE) with
constant coefficients (time-invariant)
general solution:
x(t) = xhomogeneous(t) + xforced(t)
homogeneous solution: y=0 (no forcing term) forced solution: a
guess solution for the system behavior when y(t)0
22.004 System Dynamics and Control Spring 2013 02/07/2013
-
Homogeneous and forced solutions
Homogeneous solution:
x(t) = C0 + C1es1t + C2es2 t + L+ Cnesnt where in general si = i
+ j (complex number)
s
Im(s)
Re(s)Forced solution: sometimes difficult to guess but for
specific forces of interest, quite easy.
For example, if y(t)=constant, then yforced=constant as well
(but a different constant!)
32.004 System Dynamics and Control Spring 2013 02/07/2013
-
Commonly used input functions
Step function Ramp (aka Heaviside) function
0, t < 0; 0, t < 0; ramp(t) = t, t > 0.step(t) = 1, t
> 0.
= t step(t)
Impulse Sinusoidal (aka delta-function function (t) or Dirac
function) 0, t < 0;
f(t) = sin(!t), t 0.
= sin(!t) step(t) t [sec]
42.004 System Dynamics and Control Spring 2013 02/07/2013
-
1st order system Mv + bv = f(t)
mass viscous force damping
Impulse response: equivalent to setting an initial condition
v(t=0)
v(t = 0) = v0
t/ v(t) = v0e , t > 0 M
time constant = b
Step response: f(t) is the step function (or Heaviside
function)
0, t < 0;f(t) = F0 step(t) = F0, t > 0.
F0 v(t) = 1 e t/
, t > 0
b v(t = 0) = 0
02/07/2013 2.004 System Dynamics and Control Spring 2013 5
0.368 e 1
one time constant
-
1st order system: step response
steady state (final value)
0.632 1 e 1
Nise Figure 4.3
2.004 Fall 07 Lecture 06 Monday, Sept. 17
Figure John Wiley & Sons. All rights reserved. This content
is excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
How is this different than the car suspension system?
02/07/2013 2.004 System Dynamics and Control Spring 2013 7
Figure John Wiley & Sons. All rights reserved. This content
is excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
2nd order system: step response
02/07/2013 2.004 System Dynamics and Control Spring 2013 8
-
Mechanical system components: translation
Nise Table 2.4
92.004 System Dynamics and Control Spring 2013 02/07/2013
Table John Wiley & Sons. All rights reserved. This content
is excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
11/28/13 2.004 Spring 13'
Rotational Plant
Copper flywheel
Gear set
**Read the Description of the Experimental Rotational
Plant**
Flywheel
Encoder output
DC motor
Gear set
Flex coupling
Power cable
J 3 102 kg m21
-
02/07/2013 2.004 System Dynamics and Control Spring 2013
Mechanical system components: rotation
Nise Table 2.5 Table John Wiley & Sons. All rights reserved.
This content is excluded from our CreativeCommons license. For more
information, see http://ocw.mit.edu/help/faq-fair-use/.
2
-
02/07/2013
Mechanical system components: rotation: gears
Nise Figure 2.27, 2.28 Figure John Wiley & Sons. All rights
reserved. This content is excluded from our CreativeCommons
license. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
2.004 System Dynamics and Control Spring 20133
-
02/07/2013 2.004 System Dynamics and Control Spring 2013
Gear transformations
Nise Figure 2.29Figure John Wiley & Sons. All rights
reserved. This content is excluded from our CreativeCommons
license. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
4
-
02/07/2013 2.004 System Dynamics and Control Spring 2013
Rotational mechanical system: example
Nise Figure 2.30a-b
Figure John Wiley & Sons. All rights reserved. This content
is excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
5
-
2/13/2013 2.004 Spring 13'
Damping Model
Viscous Damping
Coulomb damping results from the sliddry surfaces. The friction
generated by thmotion of the two surfaces is a source of
edissipation. It is opposite to the direction and is independent of
surface area, displaposition, and velocity
ing of two e relative nergy
of motion cement or
Coulomb Damping
Static
Kinetic
6
-
02/07/2013 2.004 System Dynamics and Control Spring 2013
Coulomb friction
velocity friction velocityfriction
Coulomb friction is in opposite direction to the velthe
magnitude of the friction force is independent magnitude of the
velocity
ocity;of the
Example: Block sliding on a rough surface
7
-
02/07/2013 2.004 System Dynamics and Control Spring 2013
Viscous friction
velocity friction velocityfriction
Viscous friction is in opposite direction to the velocthe
magnitude of the friction force is proportional tmagnitude of the
velocity
ity;o the
8
-
11/28/13 2.004 Spring 13'
Eddy Currents Viscous friction
Eddy currents are generated when there is relative motion
between a conducting object and a magnetic field. The rotating
currents in the conducting object are due to electrons experiencing
a Lorentz force that is perpendicular to their motion and the
magnetic field (F=qvB).
The Lorentz force results in current in the radial direction on
the flywheel; these currents, since the wheel is turning, result in
an opposing magnetic field and a force resisting the motion.
The Eddy current and the resisting force are both proportional
to the velocity |v|; therefore, they resist motion in a way that is
exactly equivalent to viscous friction.
9
-
In-class experiment
Familiarize with the laboratory equipment and software tools
Study the frictional characteristics of the motor, gear train,
and bearings in the flywheel system
Explore the effect of damping on the flywheel system
10
-
11/28/12 2.004 Spring 12'
Optical Encoders
Regular phase
Quadrature phase
Hewlett Packard. All rights reserved. This content is excluded
from our CreativeCommons license. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
11
-
US Digital Optical Encoder E6S-2048-187
Quick, simple assembly and disassembly
Rugged screw-together housing
Positive finger-latching connector
Accepts .010" axial shaft play
Tracks from 0 to 100,000 cycles/sec
64 - 2500 CPR | 256 to 10,000 PPR
2 channel quadrature TTL squarewave outputs
Optional index (3rd channel)
-40 to +100C operating temperature
Fits shaft diameters from 2mm to 1"
11/28/12 2.004 Spring 12'
Max speed = 2,400 rpm
source unknown. All rights reserved. This content is excluded
from our CreativeCommons license. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
12
-
!(t) =V0(t)
Kt
You will monitor the angular velocity profile using the ETach2
electronic
tachometer that is attached to the rotary encoder on the
flywheel shaft.
It produces an analog voltage vo proportional to the shaft speed
! ! Vo = Kt!
where the tachometer constant Kt = 0.016 volts/rpm
Converting Tachometer reading
13
-
Spin the flywheel by hand, and record the angular velocity decay
!(t), using the computer-based
Chart Recorder(VI),(Remember to convert the Chart Recorder
output to angular velocity.)
Repeat the same procedure with one and two magnets (damper) on
the flywheel
Generate clearly labeled plots and indicate, for each case,
which kind of friction dominate the
damping behavior. For viscous damping, also compute the time
constant . (J 3 102 kg m2)
Extra credit: Can you determine the damping coecient for each
viscous case and torque due to
Coulomb friction (Assume the eect of Coulomb damping is
significantly smaller than the eect
of viscous damping)
Hand in your results at the end of class.
Procedure
Save your data so that it is readily available later(online or
on USB.)
You will need them for Problem Set 1.
14
-
11/28/13 2.004 Spring 13'
Put a meaningful title Label each axis (with proper unit) Label
each data source
>> mydata;>> plot(t_mydata,v_mydata);>>
title(Lab 1 (no mag));>> xlabel(Time (s));>>
ylabel(Voltage(V));>> legend(Velocity,Linear);>>
grid;>>
Courtesy of The MathWorks, Inc. Used with permission. MATLAB and
Simulink are registered trademarks of The MathWorks, Inc. See
www.mathworks.com/trademarksfor a list of additional trademarks.
Other product or brand names may be trademarks or registered
trademarks of their respective holders.
Making A Good Plot with MATLAB
MATLAB commands:
15
-
For pure Coulomb damping: J !(t) = Text(t) Tc(t)
(The external torque is 0 for our experiment, Tc(t) is
relatively constant Tc)
Solving this ODE =) !(t) = !0 TcJ t
For pure viscous damping: J !(t) + b!(t) = Text =) !(t) + bJ!(t)
= 0
Solving this ODE =) !(t) = !0e( bJ )t
Solving the equations of motion
16
-
2/13/2013 2.004 Spring 13'
Fitting an Exponential Function
Estimate from the time at which the response has decayed to:
Slope method
17
-
2/13/2013 2.004 Spring 13'
Fitting an Exponential Function
Log linear fit:
18
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
Goals for today
Review of translational dynamical variables: position,
velocity
Review of rotational dynamical variables: angle, angular
velocity
Electrical dynamical variables: charge, current, voltage
Basic electrical components Resistance Capacitance
Inductance
DC Motor: an electro-mechanical element basic physics &
modeling equation of motion transfer function
Experiment: step and ramp response of the flywheel driven by the
DC motor open loop (no feedback)
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 1
-
Impedances: translational mechanical
Nise Table 2.4
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 2
!"##$#!#%&
-
Impedances: rotational mechanical
Nise Table 2.5
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 3
!"##$#!#%&
-
Electrical dynamical variables: charge, current, voltage
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 4
-
Electrical resistance
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 5
-
Capacitance /1
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 6
-
Capacitance /2
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 7
-
Inductance
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 8
-
Summary: passive electrical elements; Sources
2.04A Spring 13 Lecture 06 Thursday, Feb. 14
9
!"##$#!#%&
-
Combining electrical elements: networks
Nise Figure 2.6
Network analysis relies on two physical principles
Kirchhoff Current Law (KCL) Kirchhoff Voltage Law (KVL)
charge conservation energy conservation
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 10
!"##$#!#%&
-
Impedances in series and in parallel
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 11
!"##$#!#%&
-
The voltage divider
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 12
!"##$#!#%&
-
Example: the RC circuit
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 13
!"##$#!#%&
-
Interpretation of the RC step response
+
+
+ +
+
+
+
+++
+
+ +
++ + + +
+
++ +
+
+
+
+
+
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 14
!"##$#!#%&
-
Example: RLC circuit with voltage source
Nise Figure 2.3
Nise Figure 2.4
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 15
!"##$#!#%&
-
Quick summary of electrical systems
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 16
!"##$#!#%&
-
Power dissipation in electrical systems
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 17
!"##$#!#%&
-
DC Motor as a system
Transducer:
Converts energy from one domain (electrical) to another
(mechanical)
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 18
!"##$#!#%&
-
Physical laws applicable to the DC motor
Lorentz law: Faraday law:magnetic field applies force to a
current moving in a magnetic field results (Lorentz force) in
potential (back EMF)
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 19
!"##$#!#%&
-
DC motor: principle and simplified equations of motion
multiple windings N: continuity of torque
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 20
!"##$#!#%&
-
DC motor: equations of motion in matrix form
multiple windings N: continuity of torque
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 21
!"##$#!#%&
-
DC motor: why is Km=Kv?
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 22
!"##$#!#%&
-
DC motor with mechanical load and realistic electrical
properties (R, L)
inductance dissipation (due to windings) (resistance of
windings)
dissipation load (viscous friction (inertia)
in motor bearings)
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 23
!"##$#!#%&
-
DC motor with mechanical load and realistic electrical
properties (R, L)
inductance dissipation (due to windings) (resistance of
windings)
dissipation load (viscous friction (inertia)
in motor bearings)
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 24
!"##$#!#%&
-
DC motor with mechanical load and realistic electrical
properties (R, L)
inductance (due to windings)
dissipation (resistance of windings)
dissipation load (viscous friction (inertia)
in motor bearings)
2.04A Spring 13 Lecture 06 Thursday, Feb. 14 25
!"##$#!#%&
-
Lab 06: Running the flywheel with DC motor open loop
Observe motor behavior under different driving voltages.
Examine transient response of a DC motor
Important: always be ready to turn off the break of power
amplifier when motor is spinning too fast!!
Experimental Setup: Open-loop
Signal Generator
Power
Amplifier CH1 DC motor-flywheel
system
ETACH2 ACH2 PC Data-
Acquisition
ACH 1
2.004 Spring 13 Lecture 06 Thursday, Feb. 14 26
-
Procedure
Make sure all devices are powered off; connect function
generator, power amplifier, flywheel system and PC data acquisition
system as shown in the previous slide.
Add one magnet to the flywheel damper, open Chart Recorder to
record ACH1 and ACH2; turn on function generator, power amplifier
and start experiment.
Obtain system response for a ramp function with Freq: 0.2 Hz,
Amp: 0.5 V, offset: 0 V. Repeat experiment using a sine function
with same parameters. Record your response. Referring to materials
we learned from last lecture, comment on the behavior of DC motor-
flywheel system.
Use a DC signal with 0.2 V offset. Start experiment and record
DC motor transient response data. Convert voltage signal to motor
speed (you will need to make use of gear ratio). Generate
appropriate plots of motor speed & amplified current V.S time.
Compute mechanical power of the DC motor.
Set your function generator to generate a square function(SQUA),
set frequency to 0.04 Hz, amplitude to 0.200V and offset to 0.100V.
Collect a full period of flywheel response and function generator
signal. (You can take a screen shots of the plot in Chart
Recorder)
2.004 Spring 13 Lecture 06 Thursday, Feb. 14 27
-
n1=
n2 180
44
Some Hints
Gear Ratio:
Gear 2
F
Gear 1
Unit Conversion: Power Conservation:
Ka = 2.0 A/V, Km = 0.0292 N-m
Pmechanical(t) = T (t) (t)= Km i(t) (
/A
t)
2.004 Spring 13 Lecture 06 Thursday, Feb. 14 28
-
Lab assignment p.1
Comment on how todays experiments involving step input are
interpreted differently than we did in Lab 05.
When the DC motor is driven by a step function, how many poles/
zeros do we need to consider, and where are they? How do the
magnets (eddy brakes) influence their locations?
2.04A Spring 13 Lab assignment 06 Thursday, Feb. 14 - PLEASE
RETURN TO THE T.A. 29
-
Lab assignment p.2
When the DC motor is driven by a ramp function, how many poles/
zeros do we need to consider, and where are they? How do the
magnets (eddy brakes) influence their locations?
Comment on the qualitative and quantitative agreement of your
derivations with experiment. Attach sheets with your experimental
results.
2.04A Spring 13 Lab assignment 06 Thursday, Feb. 14 - PLEASE
RETURN TO THE T.A. 30
-
!
"#$
%&'"!&()*
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
Todays plan
1st order system response: review the role of zeros
2nd order system response: example: DC motor with inductance
response classifications:
overdamped underdamped undamped
Linearization from pendulum equation to the harmonic
oscillator
1
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
Review: step response of 1st order systems
Nise Figure 4.3
steady state(final value)
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2
-
J !(t) + b!(t) = f(t) f(t) = F0 step(t)
!1 =F0b
Lecture 07 Thursday, Feb. 212.004 Spring 13
Steady-state
Note that as t, the exponential decays away, and the step
response tends to 1, i.e. the value of the driving force.
More generally, if we consider a flywheel-like viscously damped
system with equation of motion expressed as 1st order linear
time-invariant ODE
and step excitation
!(t) =F0b
1 et/
, t > 0
=
J
b
[where f(t) and F0 have units of torque,]the step response
is
the angular velocity as t tends to
This long-term value is known as the systems steady state In
systems where the output physically represents a velocity, the
steady
state is also known as terminal velocity.
3
-
limt!1g(t) = lims!0sG(s).
Lecture 07 Thursday, Feb. 212.004 Spring 13
Steady state in the Laplace domain: the final value thm.
It turns out that we can predict the steady state of a system
directly in the Laplace domain by using the following property
known, for obvious reasons, as the final value theorem:
which holds generally if g(t) and G(s) form a Laplace transform
pair.
(s)
F (s)=
1
Js+ b In the case of the flywheel, the transfer function is
F0F (s) =F
s) 0(s) =
s (Js+ b)For the step response we have
lims!0s(s) =F0b
It is easy to verify that
in agreement with the result for the steady state of this system
in the previous page
4
-
H(s) =s+ z
D(s)= s 1
D(s)+ z 1
D(s)
Lecture 07 Thursday, Feb. 212.004 Spring 13
A word on zeros
Transfer functionwith a zero
Derivative Amplificationoperator (gain)
H0(s) =1
s+ p
Example: compare the step response of the two systems below:
H(s) =s+ z
s+ p
5
-
Example:
p = 0.5;z = 1.0
U(s) =1
sF0(s) F0(s) =
1
s
1
s+ p=
1
p
1
s 1
s+ p
) f0(t) = 1
p
1 ept , t > 0.
F (s) F (s) = sF0(s) + zF0(s)
) f(t) = ddt
f0(t) + zf0(t) = ept +
z
p
1 ept , t > 0.
Lecture 07 Thursday, Feb. 212.004 Spring 13
Step response without zero vs with zero
H0(s) =1
s+ p
Please verify yourselves thispartial-fraction
expansion!
H(s) =s+ z
s+ p
U(s) =1
s
2 0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
t [sec]
f 0 [a
.u.]
2 0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
t [sec]
f [a.
u.]
withoutzero
withzero
j
-0.5
j
-0.5-1
6
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
Zero on the right-hand side?
2 0 2 4 6 8 100
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
t [sec]
f 0 [a
.u.]
2 0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
t [sec]
f [a.
u.]
withoutzero(lhs)
withzero(lhs)
j
-0.5
j
-0.5-1
2 0 2 4 6 8 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
t [sec]
f [a.
u.]
2 0 2 4 6 8 101
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
t [sec]
f [a.
u.]
j
-0.5 0.25
j
-0.5 1.0
Example:
p = 0.5;
7
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
The general 2nd order system
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
8
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
The general 2nd order system
Nise Figure 4.10 John Wiley & Sons. All rights reserved.
This content is excluded from our CreativeCommons license. For more
information, see http://ocw.mit.edu/help/faq-fair-use/.
9
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
The general 2nd order system
Nise Figure 4.11 John Wiley & Sons. All rights reserved.
This content is excluded from our CreativeCommons license. For more
information, see http://ocw.mit.edu/help/faq-fair-use/.
10
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
The underdamped 2nd order system
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
11
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
The underdamped 2nd order system
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
12
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
The underdamped 2nd order system
forced response,sets steady state
Nise Figure 4.10
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
13
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
Transients in the underdamped 2nd order system
Nise Figure 4.14
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
14
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
Transient qualities from pole location in the s-plane
Nise Figure 4.19
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
15
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
Linearization This technique can be used to approximate a
non-linear system
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
16
-
Lecture 07 Thursday, Feb. 212.004 Spring 13
Linearizing systems: the pendulum
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
17
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
Lecture 08 Thursday, Feb. 21 LAB2.004 Spring 13
Observing 2nd order system behavior
Today we will change the flywheel output so it becomes a 2nd
order system employ a feedback scheme such that we can tune the 2nd
order
system response from overdamped to undamped
You need to know 1st order systems Laplace transforms
We will cover (here and in Lecture 07) the basics of 2nd order
system behavior
You do not need to know yet how feedback systems work (we will
cover in detail in the second
part of the class)
1
-
r(t) !(t)J !(t) + b!(t) = r(t)
(s)
R(s)=
1
Js+ b
(s)R(s)
(t) =
Z t0!(t0)dt0
(s) = (s)s
1
(s)
R(s)=
1
s(Js+ b)
Lecture 08 Thursday, Feb. 21 LAB2.004 Spring 13
Flywheel: switching to angular position as output /1
We modeled the flywheel as a SISO system with the torque r(t) as
input and the angular velocity (t) as output. Schematically,
Time domain (ODE) Laplace domain (TF)
Now let us consider instead the angular displacement (t) as
the
output. This is related to (t) via an integral:
In the Laplace domain, the relationship becomes
Using the TF for (s) we obtain
2
-
r(t) R(s)
Lecture 08 Thursday, Feb. 21 LAB2.004 Spring 13
Flywheel: switching to angular position as output /2
Schematically,
Time domain (ODE) Laplace domain (TF)
Some important observations: the diagrams in this and the
previous page correspond to the same physical system; however, the
physical quantity that we choose to represent the output is
different;
the ODE for (t) can be obtained by inverse-Laplace transforming
the TF (s)/R(s) [recall that multiplying by s in the Laplace domain
is equivalent to taking a derivative in the time domain] or by
deriving the equation of motion in the time domain using Newtons
law for rotational systems. The results are of course consistent
(check that!)
J (t) + b(t) = r(t)(s)
R(s)=
1
s(Js+ b)
(t) (s)
3
-
The transfer function(s) 1
=R(s) s(Js+ b)
has two poles: one at b/J (same as the 1storder system we had
consideredearlier, when angular velocity was the output) and one at
the origin. The pole atthe origin results from the integrator, i.e.
the integral operation that convertsangular velocity !(t) to
angular position (t).
se look more like the standard 2ndorder system, jThis is
physically implemented by connecting theositive inlet of the
amplifier and the output of the tive inlet and specifying a
feedback gain K in the b/J 0t going into the details of the
derivation (we willllowing weeks) the transfer function of the
system
Low gain (overdamped)(s) K
=R(s) Js2 + bs+K jto observe experimentally that at low gain,
i.e.
To make the flywheel responwe can introduce feedback.function
generator to the pposition meter to the negacomputer interface.
Withoudo that extensively in the fowith feedback becomes
The purpose of the lab issmall values of K, the response is
overdamped; whereas at high gain, i.e. forlarge values of K, the
response becomes underdamped. b/J 0We will verify these
observations with mathematical rigor in the following weeks.For
now, please consider K as a knob which you can turn to tune the
response High gain (underdampfrom overdamped to underdamped. More
details will come, we promise!
:open-loop poles
Lecture 08 Thursday, Feb. 21 LAB2.004 Spring 13
Flywheel with feedback: a tunable 2nd order system
b/J 0
j
(no feedback or K=0)
ed)
4
-
Lecture 08 Thursday, Feb. 21 LAB2.004 Spring 13
Lab procedure
First, please read carefully the previous three introductory
pages, and make sure you are comfortable with the flywheel as a 2nd
order system (now that weve defined the angular position as output)
and the role of gain K in tuning the transfer function.
Derive the roots of the polynomial Js2+bs+K=0 and verify that
for small values of K they are both real, whereas for large values
of K they form a complex pair (i.e. both have the same real part,
and the imaginary parts have equal magnitude but opposite
signs).
With help from your TA, verify all the connections in your
system, especially where the inputs and outputs are applied.
Identify the definition of K in your digital interface.
Now use a step function as input to the flywheel, and try
different values of K. Record at least two overdamped responses
(for two low values of K) and two underdamped responses (for two
high values of K) and the values of K for which you observed
them.
For the underdamped responses, estimate the values of damping
ratio and damped oscillation frequency d (you will find definitions
of these quantities in Lecture 07.)
Hand in printouts of your results (or email in digital form) to
the TA at the end of the lab.
5
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
Todays goal
Introduce root locus Close loop transfer function
&characteristic equation Root locus with an example
Rules for sketching root locus
Observation of Root Locus with MATLAB s graphical user
interface
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 1
-
Close-loop transfer function and characteristic equation
Consider a unity feedback control loop
John Wiley & Sons. All rights reserved. This content is
excluded from our Creative
N (s)G(s) =
D(s)
Commons license. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
Closed-loop transfer function:
KG(s) KN(s)Gclosed(s) = =
1 +KG(s) D(s) +KN(s)
The closed-loop characteristic equation:
1 +KG(s) = 0
More generally: D(s) +KN(s) = 0
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 2
-
What is root locus
Root locus is all values of s that satises the system
characteristic equation:
1 + KG(s) = 0 or more generally: D(s) + KN(s) = 0
as the loop gain K varies from 0 to 1
Example: 0.3162
G(s) = s + 2
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 3
-
Cranking up the gain JType 0 system (no disturbance)
Type 1 system with disturbance
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 4
-
Cranking up the gain LType 1 system (no disturbance)
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 5
-
Cranking up the gain: poles and step response
Root Locus
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 6
-
Root Locus for non-unity negative feedback systems
Closed loop TF:
Open loop TF: KG(s)
Nise Figure 8.1
Caveat: K>0 (i.e., negative
feedback)
Condition for closed-loop pole: denominator of closed-loop TF
must equal zero:
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 7
-
Nise Figure 8.10
Breakaway point Root Locus terminology
Real-axis segment
Breakaway point
Asymptote angle
Asymptote real-axis intercept
Break-in point
Nise Figure 8.12
Nise Figure 8.25 Nise Figure 8.19
RL imaginary axis intercept
Departure/Arrival anglesBranches
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 8
-
8
Root-locus sketching rules
Rule 1: # branches = # poles Rule 2: always symmetrical about
the real axis Rule 3: real-axis segments are to the left of an odd
number of real-
axis finite poles/zeros
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 9
-
Root-locus sketching rules
Example
Rule 4: RL begins at poles, ends at zeros
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 10
-
Poles and zeros at infinity
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 11
-
Root Locus sketching rules
Rule 5: Asymptotes: angles and real-axis intercept
Nise Figure 8.12
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 12
-
Root Locus sketching rules
Rule 6: Real axis break-in and breakaway points
maxK for this real axis segment
minK for this real axis segment
Nise Figure 8.13
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 13
-
Root Locus sketching rules
Lecture 11 Thursday, Feb. 28 2.04A Spring 13
Rule 6: Real axis break-in and breakaway points
Nise Figure 8.13
maxK for this real axis segment
minK for this real axis segment
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
14
-
Root Locus sketching rules
Rule 7: Imaginary axis crossings
system response contains undamped terms at this point
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 15
-
Root Locus sketching rules
Rule 7: Imaginary axis crossings
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28
system response contains undamped terms at this point
16
-
Root Locus sketching rules summary
Rule 1: # branches = # poles Rule 2: symmetrical about the real
axis Rule 3: real-axis segments are to the left of an odd number of
real-
axis finite poles/zeros Rule 4: RL begins at poles, ends at
zeros Rule 5: Asymptotes: angles, real-axis intercept
Rule 6: Real-axis break-in and breakaway points
Rule 7: Imaginary axis crossings (transition to instability)
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 17
-
Practice 1: Sketch the Root Locus
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
Nise Figure P8.2
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 18
-
Practice 2: Are these Root Loci valid? If not, correct them
Nise Figure P8.1 John Wiley & Sons. All rights reserved.
This content is excluded from our CreativeCommons license. For more
information, see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 11 Thursday, Feb. 28 19
-
In-class Experiment 4
What Is Root Locus Design?
A common technique involving iterating on a design by
manipulating the compensator gain, poles, and zeros in the root
locus diagram.
As system parameter k varies over a range of values, the root
locus diagram shows the trajectories of the closed-loop poles of
the feedback system.
SISO Design Tool in MATLAB: A graphical-user interface that
allows the user to tune control
parameters from root locus design and system response
simulation.
12/03/13 2.004 Spring 12' 20
-
System Modeling
Km/NKa Js + B G(s)
Kt 21
-
System Parameters
22
-
Procedures
In MATLAB workspace, construct necessary system data (transfer
functions) based on the system model
Graphically tune the control parameters of the following general
forms.
C(s) = a1, C(s) = a2 + b2s, C(s) = a3 + b3/s
At the end of the class, turn in your result parameters, root
locus plots and system response.
12/03/13 2.004 Spring 13' 23
-
---------------
Useful Matlab Commands
>> B=0.014;J=0.03;N=44/180;ka=2;km=0.0292;kt=0.016;
>> G=tf([ka*km/N],[J,B]);
Transfer function:Setup transfer function
0.2389
0.03 s + 0.0872
12/18/12 2.004 Spring 12' 24
-
Tips 1
In the command window type in sisotool tool open the SISO Design
Tool Interface.
Select appropriate control architecture
Courtesy of The MathWorks, Inc. Used with permission. MATLAB and
Simulink are registered trademarks of TheMathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks.
Other product orbrand names may be trademarks or registered
trademarks of their respective holders.
Enter or import system system data (G, H) from workspace.
12/03/13 2.004 Spring 12' 25
-
Tips 2
Under Compensator Editor tab, create general form ofKp Kis2 + s
+Kd Kdcontroller model (e.g : Kds + Kp + Ki/s = Kd )s
Courtesy of The MathWorks, Inc. Used with permission. MATLAB and
Simulink are registered trademarks of TheMathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks.
Other product orbrand names may be trademarks or registered
trademarks of their respective holders.
12/03/13 2.004 Spring 12'
26
-
Tips 3
Select design plots you want to use and click on show design
plot under Graphical Tuning.
You can drag/add/remove poles & zeros in this graphical root
locus design window. Simulation result is instantaneous.
Courtesy of The MathWorks, Inc. Used with permission. MATLAB and
Simulink are registered trademarks of TheMathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks.
Other product orbrand names may be trademarks or registered
trademarks of their respective holders.
12/03/13 2.004 Spring 12'
27
-
Tip4
Select Step for Plot 1, check closed loop r to y. Show analysis
plot under Analysis Plot tab generates a real-time step response of
your system. (You can also look at other plots)
Courtesy of The MathWorks, Inc. Used with permission. MATLAB and
Simulink are registered trademarks of TheMathWorks, Inc. See
www.mathworks.com/trademarks for a list of additional trademarks.
Other product orbrand names may be trademarks or registered
trademarks of their respective holders.
28
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and Controls Spring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
Lecture 12 Tuesday, March 52.04A Spring 13
Todays goal
Root Locus examples and how to apply the rules single pole
single pole with one zero two real poles two real poles with one
zero three real poles three real poles with one zero
Extracting useful information from the Root Locus transient
response parameters limit gain for stability
1
-
X(s)Y (s)
X(s)
Y (s)
OL
=1
s+ 2
X(s)
Y (s)
CL
=K
s+ 2 +K
As K varies from 0 to 1 . . .
K = 0K =1
Lecture 12 Tuesday, March 52.04A Spring 13
Root Locus definition
Root Locus is the locus on the complex plane of closed-loop
poles as the feedback gain is varied from 0 to .
2
+
K G(s) =
1
s+ 2G(s) =
1
s+ 2
Y (s) X(s)
2
j!Open-Looppole
2
j!Open-LooppoleRoot Locus
-
Lecture 12 Tuesday, March 52.04A Spring 13
Root-locus sketching rules
Rule 1: # branches = # poles Rule 2: always symmetric with
respect to the real axis Rule 3: real-axis segments are to the left
of an odd number of real-
axis finite poles/zeros
3
8 7 6 5 4 3 2 1 0 10.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4Root Locus
m (seconds1)
jt (s
econ
ds1
)
X(s)
Y (s)
OL
=1
s+ 2
6 5 4 3 2 1 0 10.2
0.15
0.1
0.05
0
0.05
0.1
0.15
0.2Root Locus
m (seconds1)
jt (s
econ
ds1
)
X(s)
Y (s)
OL
=s+ 5
s+ 2
1 branch
to the left of the single pole
1 branch
to the left of the pole
nothing to the leftof one zero +
one pole
-
X(s)
Y (s)
CL
=K (s+ 5)
(K + 1) s+ (5K + 2)closedloop
pole
= 5K + 2
K + 1! 5, as K !1
X(s)
Y (s)
CL
=K
s+ (K + 2)closedloop
pole
= (K + 2)! 1, as K !1
Lecture 12 Tuesday, March 52.04A Spring 13
Root-locus sketching rules
Rule 4: begins at poles, ends at zeros
4
6 5 4 3 2 1 0 10.2
0.15
0.1
0.05
0
0.05
0.1
0.15
0.2Root Locus
m (seconds1)
jt (s
econ
ds1
)
X(s)
Y (s)
OL
=s+ 5
s+ 2
1 branch
to the left of the pole
nothing to the leftof one zero +
one pole
K = 0K =1
8 7 6 5 4 3 2 1 0 10.4
0.3
0.2
0.1
0
0.1
0.2
0.3
0.4Root Locus
m (seconds1)
jt (s
econ
ds1
)
X(s)
Y (s)
OL
=1
s+ 2
1 branch
to the left of the single pole
K = 0K =1
We say that this TF has a zero at infinity
-
3.5 3 2.5 2 1.5 1 0.5 0 0.52
1.5
1
0.5
0
0.5
1
1.5
2Root Locus
m (seconds1)
jt (s
econ
ds1
)
G(s) =1
(s+ 1) (s+ 3)
a = /2a = 2
Lecture 12 Tuesday, March 52.04A Spring 13
Root Locus sketching rules
Rule 5: Real-axis intercept and angle of asymptote
5
Two branches (Rule 1) Symmetric (Rule 2)On real axis to the left
of the
first pole at -1 (Rule 3) Two zeros at infinity (Rule 4)
8 7 6 5 4 3 2 1 0 15
4
3
2
1
0
1
2
3
4
5Root Locus
m (seconds1)
jt (s
econ
ds1
)
G(s) =1
(s+ 1) (s+ 2) (s+ 3)
Three branches (Rule 1) Symmetric (Rule 2)On real axis to the
left of the first pole
at -1 and the third pole at -3 (Rule 3) Three zeros at infinity
(Rule 4)
fia =
Pnite polesP finite zeros
#finite poles#P finite zerosa =
(2m+ 1)
#finite poles#P finite zeros
a = 2 a = /3
-
SolveXn
1
b zn =Xq
1
b pq
Lecture 12 Tuesday, March 52.04A Spring 13
Root Locus sketching rules
Rule 6: Real axis breakaway and break-in points b
6
3.5 3 2.5 2 1.5 1 0.5 0 0.52
1.5
1
0.5
0
0.5
1
1.5
2Root Locus
m (seconds1)
jt (s
econ
ds1
)
G(s) =1
(s+ 1) (s+ 2)
a = /2a = 2
Two branches (Rule 1) Symmetric (Rule 2)On real axis to the left
of the
first pole at -1 (Rule 3) Two zeros at infinity (Rule 4)
8 7 6 5 4 3 2 1 0 15
4
3
2
1
0
1
2
3
4
5Root Locus
m (seconds1)
jt (s
econ
ds1
)
G(s) =1
(s+ 1) (s+ 2) (s+ 3)
Three branches (Rule 1) Symmetric (Rule 2)On real axis to the
left of the first pole
at -1 and the third pole at -3 (Rule 3) Three zeros at infinity
(Rule 4)
a = 2 a = /3
b = 2b 1.423
-
Solve KG (j!x) = 1
Lecture 12 Tuesday, March 52.04A Spring 13
Root Locus sketching rules
Rule 7: Imaginary axis crossings
7
8 7 6 5 4 3 2 1 0 15
4
3
2
1
0
1
2
3
4
5Root Locus
m (seconds1)
jt (s
econ
ds1
)
G(s) =1
(s+ 1) (s+ 2) (s+ 3)
Three branches (Rule 1) Symmetric (Rule 2)On real axis to the
left of the first pole
at -1 and the third pole at -3 (Rule 3) Three zeros at infinity
(Rule 4)
a = 2 a = /3
b 1.423
!x 3.32K = 60
-
Lecture 12 Tuesday, March 52.04A Spring 13
What else is the Root Locus telling us
Gain = product of distances to the poles
8
8 7 6 5 4 3 2 1 0 15
4
3
2
1
0
1
2
3
4
5Root Locus
m (seconds1)
jt (s
econ
ds1
)
G(s) =1
(s+ 1) (s+ 2) (s+ 3)
p 12p 15p 20
p11
K = 60
3.5 3 2.5 2 1.5 1 0.5 0 0.52
1.5
1
0.5
0
0.5
1
1.5
2Root Locus
m (seconds1)
jt (s
econ
ds1
)
G(s) =1
(s+ 1) (s+ 2)
p2p 2
K = 2
-
Lecture 12 Tuesday, March 52.04A Spring 13
The zeros are pulling the Root Locus
Because of Rule 4 Therefore, adding a zero makes the
response
faster stable
9
16 14 12 10 8 6 4 2 0 23
2
1
0
1
2
3Root Locus
m (seconds1)
jt (s
econ
ds1
)
6 5 4 3 2 1 0 115
10
5
0
5
10
15Root Locus
m (seconds1)
jt (s
econ
ds1
)
G(s) =s+ 5
(s+ 1) (s+ 3)G(s) =
s+ 5
(s+ 1) (s+ 2) (s+ 3)
-
Lecture 12 Tuesday, March 52.04A Spring 13
Practice 1: Sketch the Root Locus
Nise Figure P8.2
10
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
Lecture 12 Tuesday, March 52.04A Spring 13
Practice 2:Are these Root Loci valid? If not, correct them
Nise Figure P8.1
11
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
Classification of feedback compensators
compensator plant C(s) +
K(s + z
Gp(s)
R(s)
Proportional-Derivative (PD) speeds up response improves
stability (RL moves to the left) may worsen steady state error
noisy
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
K Gp(s) C(s) R(s)
plantcompensator +
K s + z s
Gp(s) C(s) R(s)
plantcompensator +
K(s + z
+ K2 s
Gp(s) C(s)
R(s) plantcompensator
+
Proportional (P) Proportional-Integral (PI)
Proportional-Integral-Derivative (PID)
can meet one transient specification (e.g. rise time) other
specifications (e.g. overshoot) unmet steady state error
other specifications (e.g. overshoot) unmet decreases stability
(RL moves to the right)
can meet one specification (e.g. rise time) zero steady-state
error
complete transient specification (rise time & overshoot) no
steady-state error
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 1
-
Compensator rules of thumb Nise Figure 9.1Nise Figure 9.7
Integral action eliminates steady-state error; but, by itself,
the integrator slows down the response;
therefore, a zero (derivative action) speeds the response back
up to match the response speed of the uncompensated system
Derivative action speeds up the transient response; it may also
improve the steady-state error; but differentiation is a noisy
process
(we will deal with this later in two ways: the lead compensator
and the PID controller)
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 2
-
Example
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 3
-
Evaluating different PD controllers Nise Figure 9.15Gc(s) = K(s
+ 3)
Gc(s) = K
K=23.7 %OS=23.2 Tr=0.688 sec
Gc
K=51.4 %OS=25.4 Tr=0.197 sec
Gc(s) = K(s + 4)
(proportional)
(s) = K(s + 2) (pole-zero
cancellation)
K=35.3 %OS=27.5 Tr=0.236 sec
K=20.86 %OS=27.2 Tr=0.305 sec
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 4
-
Example: speeding up the response
The closed-loop poles shown here are with proportional control,
designed for
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 5
-
Example: speeding up the response
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 6
-
z
Example: speeding up the response
135
%O
S=constant
PD
2 0
j
0.3162 s (s + 2)
K(s + z
)
pc
pc+
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 7
-
Example: speeding up the response
PD
K(s + z
) 0.3162 s (s + 2)
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 8
-
Example: speeding up the response
PD
K(s + z
) 0.3162 s (s + 2)
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 9
-
Example: speeding up the response
PD
PD compensator
K(s + z
) 0.3162 s (s + 2)
zero
closed-loop poles
K=6.325 gives %OS=6.7; Ts=1.86sec John Wiley & Sons. All
rights reserved. This content is excluded from our CreativeCommons
license. For more information, see
http://ocw.mit.edu/help/faq-fair-use/.
2.004 Spring 13 Lecture 13 Tuesday, Mar. 5, 2013 10
-
Experiments
Closed-loop position control with derivative control action:
Experiment #1: P and PD Control of Position
Experiment #2: Compare your results with a Simulink
Simulation
Deliverables:
Properly annotated plots showing your results
Comments and discussions on your observations and results
3/5/2013 2.004 Spring 13' 11
-
Precision Position Control Example: Scanning Electron Microscope
(SEM) In Semiconductor Fabrication Process
300 mm diameter wafer 45 nm feature size
Control Console
Vacuum Chamber
Diameter of a human hair 0.1 mm = 1e5 nm
200,000x magnification
VRXUFHVXQNQRZQ$OOULJKWVUHVHUYHG7KLVFRQWHQWLVH[FOXGHGIURPRXU&UHDWLYH&RPPRQVOLFHQVH)RUPRUHLQIRUPDWLRQVHHKWWSRFZPLWHGXKHOSIDTIDLUXVH
3/5/2013 2.004 Spring 13'
12
-
Position Sensing Using Encoder and EDAC2
Reset Button
Encoder Types: Incremental (Relative): Only the relative
position of the shaft is known. No absolute 0 position.
Absolute: Unique code for each shaft position (e.g., by adding a
reference input to an incremental encoder).
VRXUFHVXQNQRZQ$OOULJKWVUHVHUYHG7KLVFRQWHQWLVH[FOXGHGIURPRXU&UHDWLYH&RPPRQVOLFHQVH)RUPRUHLQIRUPDWLRQVHHKWWSRFZPLWHGXKHOSIDTIDLUXVH
3/5/2013 2.004 Spring 13'
13
-
P, PI and PD Controllers
P Controller
Encoder Kpos
(t)
R(s)
R(s)
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
3/5/2013 2.004 Spring 13'
14
-
Plant Transfer Functions
Now we are dealing with POSITION CONTROL, DO NOT use the
velocity transfer function.
(s) KaKm/N =TF voltage to velocity: Vc(s) Jeqs + Beq
(s) 1position to velocity: = (s) s
(s) 1 (s) KaKm/NTF voltage to position: Gp(s) = = = Vc(s) s
Vc(s) s (Jeqs +Beq)
3/5/2013 2.004 Spring 13' 15
-
Comparison of Closed-Loop Transfer Functions
Let
(s) Js2 +Bs +KKpKpos
pKKP Control: GCL(s) = = R(s)
Common form s 2 + 2!ns + !2 n
(s)PD Control: GCL(s) = R(s)
= K (Kp +Kds)
Js2 + (B +KdKKpos) s +KKpKpos
3/5/2013 2.004 Spring 13' 16
-
System Parameters
J 0.03 N-m2
B 0.014 N-m-s/rad
Ka = 2.0 A/V
Km 0.0292 N-m/A V s )( 1rev Kt = (0.016 )(60 ) = 0.153 V/(rad/s)
rev/min min 2rad
44 N = = 0.244180
Ke 1.5 V/rad 17
-
2nd Order System Poles
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
3/5/2013 2.004 Spring 13'
18
-
Control Action Comparison
P improve speed but with steady-state error D improve stability
but sensitive to noise I improve steady state error but with less
stability, overshoot, longer transient,
integrator windup (we will discuss PI and PID control next
week)
3/5/2013 2.004 Spring 13' 19
-
Procedure EX1 Connect the computer-based as before except we
need to use the EDAC2
instead of ETACH2. The set-up is very similar. Install one
magnet. Important: ALWAYS RESET EDAC2 BEFORE EACH TRIAL (The
flywheel could go out of control, be ready to stop the loop at any
time.)
Before starting the experiment, spin the flywheel so that the
position mark on the flywheel is observable and define an initial
position.
Set the function generator to output a DC signal with 1.0 V
offset. Set Kp to 2, 3, 4 and start experiment. Record a transient
response for each case.
Spin the wheel back to its initial position. Set Kp to 2 and Kd
to 1. Repeat the experiment. Try two other (reasonable)
combinations of Kp and Kd control parameters. Compare P and PD
control results.
Select your favorite combination of PD control parameters, run
experiment as before after the plant reaches steady state,
continuously change your DC offset by pressing the up or down
button; observe controlling of the plant.
3/5/2013 2.004 Spring 13' 20
-
Procedure EXP2
Define a Matlab SISO model to represent the flywheel with
voltage as input and position as output. Simulate a P control with
Kp = 2.
Change your controller design to PD. Choose 2 combinations of Kp
and Kd values from EXP1 and run simulation.
Compare your simulation with results from EXP1 and comment on
agreement or discrepancy between theory and experiment.
3/5/2013 2.004 Spring 13' 21
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
Lecture 14 Thursday, March 72.04A Spring 13
Improving the steady-state error: simple integratorIntegrator as
a Compensator:
Eliminates the steady-state error,since it increases the system
Type;
however, our desirable closed-looppole A is no longer on the
root locus;
this is because the new pole at s=0changes the total angular
contributions to A so that the180 condition is no longer
satisfied.
This means that our desirabletransient response
characteristics
that would have been guaranteed by Aare no longer available
L
Nise Figure 9.3
1
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
Lecture 14 Thursday, March 72.04A Spring 13
Improving the steady-state error: PI controllerIdeal Integral
Compensator
(or Proportional-Integral Compensator):
Includes a zero on the negative realaxis but close to the
integrators pole
at the origin. The zero
has approximately the sameangular contribution to A as
theintegrators pole at the origin;therefore, the two cancel
out;
moreover, it contributes the samemagnitude to the pole at A,
so
A is reached with the same feedbackgain K.
The net effect is that we have fixedthe steady-state error
without
affecting the transient response JNise Figure 9.3
2
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
PI compensator TF: K1 +K2s
=K1
s+ K2
K1
s
=K(s+ z)
s
where K K1, z K2K1
Lecture 14 Thursday, March 72.04A Spring 13
Implementing the PI controller
Nise Figure 9.8
Another implementation is the lag compensator, which you can
learn aboutin more advanced classes (e.g., 2.14.)
3
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
Lecture 14 Thursday, March 72.04A Spring 13
Example (Nise 9.1)
Nise Figure 9.4
4
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
Lecture 14 Thursday, March 72.04A Spring 13
Steady-state and transients with the PI controller
Nise Figure 9.7
Steady-state error=0FIXED!
Transient:UNCHANGED!
Nise Figure 9.5
UNCOMPENSATED(Proportional controller)
Nise Figure 9.6
COMPENSATED(PI controller)
5
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
Lecture 14 Thursday, March 72.04A Spring 13 6
In-class experiments
Elimination of steady-state error through the use of integral
(I), and proportional plus integral (PI) control. Experiment #1:
Pure Integral Control & PI Control Experiment #2: Compare your
results with a Simulink Simulation
Hand in: Properly annotated plots showing your results. Comments
and discussions on your observations and results. (How do the
P, I, and PI control actions look and feel like?)
-
Lecture 14 Thursday, March 72.04A Spring 13 7
(Another) Limitation of P-control Steady-state error Kp is
limited by the saturation limit of the system Large Kp may amplify
noise and disturbances and lead to instability
-
Lecture 14 Thursday, March 72.04A Spring 13 8
P Control Steady-Sate Errors
In real world a set-point profile is often more complex than a
simple step input.
-
Lecture 14 Thursday, March 72.04A Spring 13 9
PI Controller
P Controller
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
2.04A Spring 13 Lecture 14 Thursday, March 7 10
P, I, and PI Comparison
P Control: steady-state error I Control: overshoot, longer
transient, integrator windup
Set-point
-
Vss = lims!0 =
A
SGcl(s) = A
KpKKtJs+B +KpKKt
Gcl(s) =Vt(s)
R(s)=
(Kps+Ki)KKtJs2 + (B +KpKKt)s+KiKKt
Vss = lims!0
A
sGcl(s)
= A
Vt(s)
R(s)=
(Kps+Ki)KKtJs2 + (B +KpKKt)s+KiKKt
= A
K = KaKm
1
N
Lecture 14 Thursday, March 72.04A Spring 13 11
Comparison of Closed-Loop Transfer Functions
Let
P Control:
PI Control: A real zeroComplex pole pair
-
2.04A Spring 13 Lecture 14 Thursday, March 7 12
Procedures
EXP1: Connect the computer-based controller same as Lab 5,
install one magnet Make function generator to produce a DC with
offset = 1.0 V. Set Kp = 0, Ki = 0.5
and 0.2. Make sure power amplifier break is turned on and record
system response for 4 to 5 seconds for each case.
Set Kp = 2, and Ki = 1 and record your response data. Compute
steady-state error. Compare this result with pure integral control
and pure proportional control from Lab 5. Change Kp and Ki both to
3, repeat experiment. Discuss your results, pay attention to the
motion of flywheel when the in square wave drops down to 0. What
effect does a integrator have on system performance?
EXP2: Modify the controller design in your Simulink model from
Lab 5 to have a
form of ; set KKp +Kis p to 2 and Ki to 1 and run simulation for
5 seconds. Comments and discussions on your observations and
results. (How do the P, I,
and PI control actions look and feel like?)
-
2.04A Spring 13 Lecture 14 Thursday, March 7
System Parameters
John Wiley & Sons. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
-
MIT OpenCourseWarehttp://ocw.mit.edu
2.04A Systems and ControlsSpring 2013
For information about citing these materials or our Terms of
Use, visit: http://ocw.mit.edu/terms.
-
2.04A Class Project
Tall Building Active Damping
2.04A Spring 13 Lecture 16&17 March 12&14 (T ue-Thu)
1
-
Problem Wind loading of skyscrapers causes tall building
sway.
Upper floor occupants suffer from motion sickness when the
building sways in the wind since people are sensitive to
accelerations as small as 0.05 m/s2 (0.005 g).
Too much building sway can also lead to long-term structural
damage.
The Hancock Tower in Boston had a problem with falling windows.
(The Hancock Tower thnow has two passively controlled 300 ton
sliding masses on the 58 floor.)
+ = Courtesy of Rob Pongsajapan on flickr. CC-BY
Cartoons sources unknown. All rights reserved. This content is
excluded from our CreativeCommons license. For more information,
see http://ocw.mit.edu/help/faq-fair-use/.
2.04A Spring 13 Lecture 16&17 March 12&14 (Tue-Thu)
2
-
Simplified Building Model
We can model a tall building as a singledegree of freedom
lumped-parameter system.
2.04A Spring 13 Lecture 16&17 March 12&14 (T ue-Thu)
3
-
Passive Vibration Damping
Sliding Mass, m2
Spring
Damper
Wind force, One way to stabilize these Fw(t)
tall builds from swaying toomuch during earthquakes or from high
winds is to install enormous pendulum weights. When the building
sways sideways the pendulum doesn't want to move (inertia) and
exerts a pull in the opposite direction.
Passive Damper (Tuned Mass Damper)
Ground
Lecture 16&17 March 12&14 (T ue-Thu) 4 2.04A Spring
13
-
Taipei 101 (http://www.taipei-101.com.tw)
Courtesy of Jirka Matousek on flickr. CC-BY Courtesy of Stefan
Tan. Used with permission.
2.04A Spring 13 Lecture 16&17 March 12&14 (Tue-Thu)
5
Taipei 101
-
The passive wind damper with a diameter of 5.5 meters and
weighting 660 metric tons, is also the largest in the world