JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
AUTOMATIKA I ROBOTIKAIZVOD IZ PREDAVANJA
Dr.sc. ari Bahrudin, docent
Dr.sc. ari Bahrudin
Autorizovana predavanja
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Geometrija radnog prostora Na osnovu definicije minimalne
konfiguracije robota mogue je odrediti i njegov manipulacioni
prostor. Manipulacioni prostor je skup taaka u koji robot moe
dovesti prihvatnicu (centar prihvata, vrh alata i drugo), odnosno
obaviti radni zadatak, kako je prikazano na slici 3.1. Izvan
manipulacionog prostora robot ne moe obavljati zadane zadatke.
Slika 3.1. Radni i manipulacioni prostor robota1Dr.sc. ari
Bahrudin Autorizovana predavanja Strana 44.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Radni prostor ine samo one take manipulacionog prostora koje
robot moe dostii uz proizvoljnu orijentaciju. Drugim rijeima, radni
prostor je prostor u kojem je mogu zahvat iz svih smjerova, dok u
preostalom manipulacionom prostoru je mogue izvesti zahvat samo pod
odreenim uglom. Radni i manipulacioni prostor su odreeni
kinematskom strukturom i geometrijom kinematskih parova robota, te
ogranienjem postavljenim na pojedine stepene slobode kretanja
pojedinog zgloba. To znai da e o tipu i broju zglobova, zatim duini
lanaka, postojeim fizikim ogranienjima, a koja su neposredno
povezana s konkretnom graom i izgledom robota, zavisiti i veliina
radnog prostora. S obzirom da ose prva tri zgloba robota odreuju
poloaj runog zgloba, a ose preostala tri zgloba odreuju
orijentaciju alata, to i tipovi zglobova upotrijebljenih za prve
tri ose odreuju i geometriju radnog prostora robota. Kolizijskim
prostorom se naziva onaj dio manipulacionog i radnog prostora koji
pripada grupi od dva ili vie robota i u kojem moe doi do sudara
(kolizije). Radni prostor moe biti ureen ili neureen. Za radni
prostor se smatra da je ureen, ako je propisan poloaj i
orijentacija izratka te ako nema prepreka u radnom prostoru. to je
radni prostor ureeniji, to su zahtjevi na nivo inteligencije robota
nii.1Dr.sc. ari Bahrudin Autorizovana predavanja Strana 45.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Kombinirajui meusobno rotacijske (R) i translacijske (T)
zglobove za prve tri ose odreuju se i slijedee konfiguracije
robota:
TTT
TTR
TRT
RTT
TRR -
RTR
RRT
RRR
pravougaona ili TTT, cilindrina ili RTT, sferna ili RRT,
rotacijska ili RRR, robot tipa SCARA- RTR, TRR ili RRT
strukture.1Autorizovana predavanja Strana 46.
Dr.sc. ari Bahrudin
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Odreeni primjeri manipulacionih prostora za karakteristine
prikazani na slijedeim slikama.
strukture
robota su
Na slici 3.2. prikazana su dva tipa robota - konzolni i
portalni, sa pravougaonom (engl. Cartesiari) konfiguracijom, ili -
TTT, kod kog je radni prostor u obliku prizme.
Slika 3.2. Prikaz manipulacionog prostora ruke robota TTT Ako se
prvi zglob kod pravougaone konfiguracije robota zamijeni
rotacijskim zglobom, tada se dobija robot cilindrine (engl.
cylindrical) konfiguracije (RTT), na slici 3.3.a1Dr.sc. ari
Bahrudin Autorizovana predavanja Strana 47.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Ako se prvi zglob kod pravougaone konfiguracije robota zamijeni
rotacijskim zglobom, tada se dobija robot cilindrine (engl.
cylindrical) konfiguracije (RTT), na slici 3.3.a Radni prostor
takvog robota je zbog ogranienosti translatomog kretanja jednak
zapremini izmeu dva vertikalna koncentrina plata valjaka. Roboti
ovakve konfiguracije se koriste za opsluivanje alatnih maina.
a) b) Slika 3.3. Prikaz razliitih manipulacionih prostora: a)
robot RTT konfiguracije b) robot RRT konfiguracije Zamijeni li se
drugi zglob cilindrine konfiguracije robota sa rotacijskim zglobom
dobiva se robot sferne (engl. spherical) konfiguracije (RRT),
prikazan na slici 3.3.b.1Dr.sc. ari Bahrudin Autorizovana
predavanja Strana 48.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Radni prostor tog tipa robota je, u sluaju da postoji ogranienje
translatornog kretanja, zapremina izmeu dvije koncentrine sfere. U
sluaju da postoji ogranienje svih kretanja, radni prostor je dio
zapremine izmeu dvije koncentrine sfere. Roboti ovakve strukture
imaju veliku fleksibilnost u pristupu odreenoj lokaciji i
primjenjuju se za takasto zavarivanje i za opsluivanje.
a) robot RRR strukture b) robot tipa SCARA Slika 3.4. Prikaz
manipulacionog prostora Na slici 3.4.a je prikaz robota rotacijske
konfiguracije (RRR) kod koje su sva tri zgloba rotaciona. Ova
konfiguracija se jo naziva revolutna, laktasta, antropomorfha ili
zglobna. Kod ove vrste robota radni prostor je kugla i to za sluaj
da ne postoje ogranienja rotacijskih kretanja.1Dr.sc. ari Bahrudin
Autorizovana predavanja Strana 49.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Kada postoje ogranienja u kretanju, radni prostor je dio kugle
sloenog oblika iji je presjek sa strane najee u obliku
polumjeseca.
Robot tipa SCARA (engl.Selected Compliance Assemblv Robot Arm)
ima osobine zglobnih i cilindrinih robota, oznaka njegove strukture
je RRR-R i sve rotacije mu se nalaze u horizontalnoj ravni
(sl.3.4.b).
a) robot RRR strukture
b) robot tipa SCARA
Slika 3.4. Prikaz manipulacionog prostora
1Dr.sc. ari Bahrudin Autorizovana predavanja Strana 50.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Uz ove tipine konfiguracije robota u primjeni su i roboti
nekonvencionalne strukture. Primjer takvog tipa robota je dat na
slici 3.5.
a) robot tipa Spine
b) robot konfiguracije klatna
Slika 3.5. Prikaz manipulacionog prostora Slika 3.5.a daje
prikaz robota tipa Spine ija je ruka sasvim gipka (podsjea na surlu
slona) i radni prostor mu je efikasno iskoriten. Bilo kojoj taki
sferoidnog manipulacionog prostora moe se prii iz bilo kojeg
smjera, pa ak i sa stranje strane, te je pogodan za rad na teko
pristupanim mjestima (npr. bojenje unutranjosti autokaroserija).
Drugi tip robota prikazan na slici 3.5.b je konfiguracije klatna
iji je radni prostor u obliku potkovice. Ovaj tip robota, koji se
moe montirati i na zid, je mogue koristiti za radove na mjestima
gdje se uobiajene robotske konfiguracije ne mogu
upotrebljavati.1Dr.sc. ari Bahrudin Autorizovana predavanja Strana
51.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Uz ove tipine konfiguracije robota u primjeni su i roboti
nekonvencionalne strukture. Primjer takvog tipa robota je dat na
slici 3.5.
a) robot tipa Spine
b) robot konfiguracije klatna
Slika 3.5. Prikaz manipulacionog prostora Slika 3.5.a daje
prikaz robota tipa Spine ija je ruka sasvim gipka (podsjea na surlu
slona) i radni prostor mu je efikasno iskoriten. Bilo kojoj taki
sferoidnog manipulacionog prostora moe se prii iz bilo kojeg
smjera, pa ak i sa stranje strane, te je pogodan za rad na teko
pristupanim mjestima (npr. bojenje unutranjosti autokaroserija).
Drugi tip robota prikazan na slici 3.5.b je konfiguracije klatna
iji je radni prostor u obliku potkovice. Ovaj tip robota, koji se
moe montirati i na zid, je mogue koristiti za radove na mjestima
gdje se uobiajene robotske konfiguracije ne mogu
upotrebljavati.1Dr.sc. ari Bahrudin Autorizovana predavanja Strana
51.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
U slijedeoj tabeli prikazane su tipine minimalne konfiguracije
robota prema ISO 9506-3.
1Dr.sc. ari Bahrudin Autorizovana predavanja Strana 52.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Veliinu radnog prostora robota je mogue priblino odrediti pomou
dohvata i hoda. Horizontalan dohvat je maksimalna udaljenost koju
runi zglob moe dosegnuti. Mjeri se od vertikalne ose oko koje robot
rotira. Horizontalan hod predstavlja ukupnu udaljenost od
vertikalne ose po kojoj se runi zglob moe kretati. Razlika izmeu
horizontalnog dohvata i hoda je minimalna udaljenost runog zgloba
od glavne vertikalne ose. S obzirom da je ta veliina pozitivna,
tada je dohvat uvijek vei ili jednak hodu. Na slici 3.6. je dat
prikaz dohvata i hoda jednog cilindrinog robota. Sa prikazane slike
se vidi daje horizontalan dohvat robota cilindrine konfiguracije
poluprenik vanjskog plata valjka radnog prostora, a da je
horizontalan hod razlika poluprenika vanjskog i unutranjeg
valjka.1Dr.sc. ari Bahrudin Autorizovana predavanja Strana 53.
Slika 3.6. Dohvat i hod cilindrinog robota
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
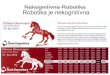
Vertikalan dohvat robota predstavlja maksimalnu udaljenost runog
zgloba robota od baze. Vertikalan hod robota je ukupna vertikalna
udaljenost po kojoj se runi zglob moe kretati i manji je ili jednak
vertikalnom dohvatu. Vertikalni dohvat cilindrinog robota e biti
vei od njegovog vertikalnog hoda ako se pomou ogranienja u kretanju
drugom osom runom zglobu ne dopusti doticanje granice radnog
prostora. Kod rotacijskih robota dohvat je esto jednak hodu, na
osnovu ega je njihov radni prostor pun. Na slijedeim slikama
prikazani su primjeri manipulacionih prostora za razliite vrste
industrijskih robota.
Slika 3.7. Ravanski prikaz manipulacionog prostora robota PUMA
500Dr.sc. ari Bahrudin Autorizovana predavanja Strana 54.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Slika 3.8. Ravanski prikaz manipulacionog prostora robota
MANUTEC r3
Dr.sc. ari Bahrudin
Autorizovana predavanja
Strana 55.
JU UNIVERZITET U TUZLI
MAINSKI FAKULTET TUZLA
Slika 3.9. Ravanski prikaz manipulacionog prostora robota KUKA
IR 161/15.0
Dr.sc. ari Bahrudin
Autorizovana predavanja
Strana 56.



























![001 Tmkusuma2013 IT-012276 ROBOTIKA [Dasar-Dasar Robotika]](https://img.pdfslide.net/doc/110x75/577cd0591a28ab9e789205c1/001-tmkusuma2013-it-012276-robotika-dasar-dasar-robotika.jpg)