Embed Size (px)
Citation preview

3.2 Unterraume
Definition 3.2.1 Sei V ein K-Vektorraum. Eine Teilmenge U ⊆ V heißtein Unterraum von V , falls gilt:
[UV1] U 6= { }.
[UV2] Fur alle v, w ∈ U gilt v + w ∈ U .
[UV3] Fur alle v ∈ U und λ ∈ K gilt v · λ ∈ U .
[UV2] bedeutet Abgeschlossenheit bezuglich der Addition, [UV3] ist dieAbgeschlossenheit bzgl. der Skalarmultiplikation. Bezeichnung U ≤ V .
Lemma 3.2.2 Ein Unterraum ist ein Vektorraum.
Beweis Weil die Addition und Skalarmultiplikation aus V “vererbt” (indu-ziert) ist, gelten sicherlich die notwendigen Assoziativ- und Distributivgeset-ze. Ferner ist durch die induzierte Verknupfung eine binare Verknupfung aufU erklart, genauer:
⊕ : U × U → U
und⊙ : U ×K → U
Zu zeigen ist, dass das additiv Inverse −u von u ∈ U auch in U liegt, unddass 0 ∈ U gilt. Nun ist −u = u⊙ (−1), also −u ∈ U wegen [UV3]. Ebensogilt 0 = u⊙ 0, also 0 ∈ U . �
Beispiel 3.2.3 (1.) {0} und V sind (triviale) Unterraume von V .
(2.) K[x] ≤ K[[x]].
(3.) Sei V = R3. Wir betrachten die folgenden Teilmengen W von V (dabei
ist x =
x1
x2
x3
):
(1.) W := {x : x1 + x2 − x3 = 0}
53
(2.) W := {x : x1 + x2 − x3 = 1}
(3.) W := {x : x1 + 3x2 = 0, x2 − 5x3 = 0}
(4.) W := {x : x31 − x2
2 = 0}
(5.) W := {x : x1x2 ≥ 0}
Man rechnet nach, dass nur die Beispiele (1) und (3) Unterraume sind. �
Die wichtigste Klasse von Unterraumen sind die Losungsmengen homogenerGleichungssysteme:
Beispiel 3.2.4 Sei A ∈ K(m,n). Dann ist
W = {x ∈ Kn : Ax = 0}
ein Unterraum von Kn. �
Der Schnitt von beliebigen Unterraumen ist wieder ein Unterraum. Die Ver-einigung von Unterraumen ist im allgemeinen kein Unterraum:
Satz 3.2.5 Sei Wi, i ∈ I, eine Familie von Unterraumen von V . Dann istW :=
⋂
i∈I ein Unterraum von V .
Beweis Klar ist 0 ∈ W , also W 6= { }. Zu [UV2]: Ist u, v ∈ W , so gilt nachDefinition von W sogar u, v ∈ Wi fur alle i ∈ I, und damit u + v ∈ Wi furalle i ∈ I, somit u+ v ∈ W . Man zeigt uλ ∈ W fur u ∈ W genauso. �
Es sei auf folgendes hingewiesen: Die hier gemachte Behauptung ist starkerals die Behauptung U1 ∩ U2 ist Unterraum fur zwei Unterraume U1 und U2.Aus der Behauptung konnten wir namlich nicht folgern, dass der Schnitt uberbeliebige Familien von Unterraumen wieder ein Unterraum ist.
Die Frage ist, ob denn in der Praxis solche Schnitte vorkommen. Ja, siekommen sehr wohl vor:
54
Definition 3.2.6 Sei S ⊆ V . Dann heißt
〈S〉 :=⋂
S⊆T≤V
T
der von S erzeugte Unterraum.
Der hier definierte Unterraum heißt auch das Erzeugnis von S. Das es wirk-lich ein Unterraum ist, folgt aus Satz 3.2.5. Es ist der kleinste S umfassendeUnterraum! Es gibt eine andere Moglichkeit, das Erzeugnis von S zu be-schreiben:
Satz 3.2.7 Ist S ⊆ V eine nicht-leere Teilmenge von V , so besteht S ausallen Linearkombinationen von S.
Beweis (Skizze) Man uberlegt sich zunachst, dass alle Linearkombinatio-nen von S in 〈S〉 liegen mussen. Dann zeigt man, dass die Menge aller Li-nearkombinationen einen Vektorraum bilden, der naturlich S umfaßt. Damitist die Menge der Linearkombinationen von S der kleinste S umfassendeUnterraum. �
Sind W1, . . . ,Wk Unterraume von V , so nennt man den von⋃k
i=1Wi erzeug-ten Unterraum die Summe W1 +W2 + . . .+Wk. Man kann zeigen:
Satz 3.2.8 Sind Wi Unterraume von V , i = 1, . . . k, so gilt
W1 + . . .+Wk = {w1 + w2 + . . .+ wk : wi ∈ Wi}.
Beweis Wie Beweis von Satz 3.2.7. �
Definition 3.2.9 Sei U ein Unterraum von V . Dann heissen die Neben-klassen U + x := {u+ x : u ∈ V } affine Unterraume. Wir wollen auchdie leere Menge als einen affinen Unterraum bezeichnen.
55
Satz 3.2.10 Sei A ∈ K(m,n). Dann ist
W = {x ∈ Kn : Ax = b
ein affiner Unterraum U + v von Kn. Dabei ist U der Losungsraum deshomogenen Systems Ax = 0, und v ist eine beliebige Losung des inhomogenenSystems W = {x ∈ Kn : Ax = b. �
Dieser Satz bedeutet: Die allgemeine Losung eines inhomogenen linearenGleichungssystems ist die Losung des homogenen Systems plus einer (be-liebigen) speziellen Losung des inhomogenen Systems.
Lemma 3.2.11 Zwei affine Unterraume U + x und U + y sind gleich oderdisjunkt.
Beweis Angenommen v ∈ (U +x)∩ (U +y), z.B. v = u+x = u′+y. Fernersei u′′+ x ein beliebiger Vektor in U +x. Dann u′′ + x = u′′ + u′−u+ y, alsou′′ + x ∈ U + y. �
Die affinen Unterraume U+x bilden eine Zerlegung von V . Wir haben gelernt,dass zu dieser Zerlegung eine Aquivalenzrelation gehort. Diese Aquivalenzre-lation kann man wie folgt angeben:
Satz 3.2.12 Ist U ein Unterraum von V , so ist die Relation ∼ auf V mitu ∼ v ⇔ u − v ∈ U eine Aquivalenzrelation auf V . Die Aquivalenz-klassen sind die affinen Unterraume U + x.
Beweis Es genugt zu zeigen:
u− v ∈ U ⇔ u, v ∈ U + x fur ein x ∈ V .
Sei also u − v ∈ U . Dann u, v ∈ U + v, was zu zeigen war. Die Umkehrungist klar. �
Die Menge der Nebenklassen von U bezeichnet man als V/U (V modulo U).Man kann V/U zu einem Vektorraum machen, den man den Faktorraumnennt:
Satz 3.2.13 Sei V ein K-Vektorraum und U ein Unterraum von V . Dannist V/U ein K-Vektorraum, wenn die Addition und die Skalarmultiplikationwie folgt definiert wird:
56
Addition: (U + x) + (U + y) := U + (x+ y) fur alle x, y ∈ V
Skalarmultiplikation: (U + x) · λ := U + xλ fur alle x ∈ V, λ ∈ K.
Beweis Machen Sie sich klar, dass man nur die Wohldefiniertheit der Ver-knupfung zeigen muss. Die Rechenregeln gelten, weil die Regeln schon fur Vgelten. �
3.3 Basis, lineare (Un)abhangigkeit, Dimen-
sion
Das Material dieses Kapitels gehort zu den Herzstucken einer jeden LAAGVorlesung und ist extrem beliebter Prufungsstoff (in praktisch jeder mundli-chen Prufung wird danach gefragt).
Definition 3.3.1 Sei S ⊆ V . Dann heißt S linear abhangig, falls esVektoren v1, . . . , vn ∈ S und Skalare λi ∈ K gibt mit
v1λ1 + . . .+ vnλn = 0,
wobei nicht alle λi gleich 0 sind. Andernfalls heißt S linear unabhangig.
Bemerkung 3.3.2 (1.) Teilmengen linear unabhangiger Mengen sind linearunabhangig.
(2.) Ist S linear abhangig und S ⊆ T , so ist auch T linear abhangig.
(3.) Eine Menge S ist genau dann linear unabhangig, wenn alle endlichenTeilmengen linear unabhangig sind.
Definition 3.3.3 Eine Teilmenge S ⊆ V mit 〈S〉 = V heißt Erzeugenden-system von V . Ein linear unabhangiges Erzeugendensystem ist eine Basis.Ein Erzeugendensystem S heißt minimal, wenn S \ {v} fur alle v ∈ Skein Erzeugendensystem mehr ist. Wir nennen eine Menge S eine maximallinear unabhangige Menge, wenn S ∪{v} linear abhangig ist fur alle v /∈ S.Hat ein Vektorraum eine endliche Basis, so heißt er endlichdimensional.
57
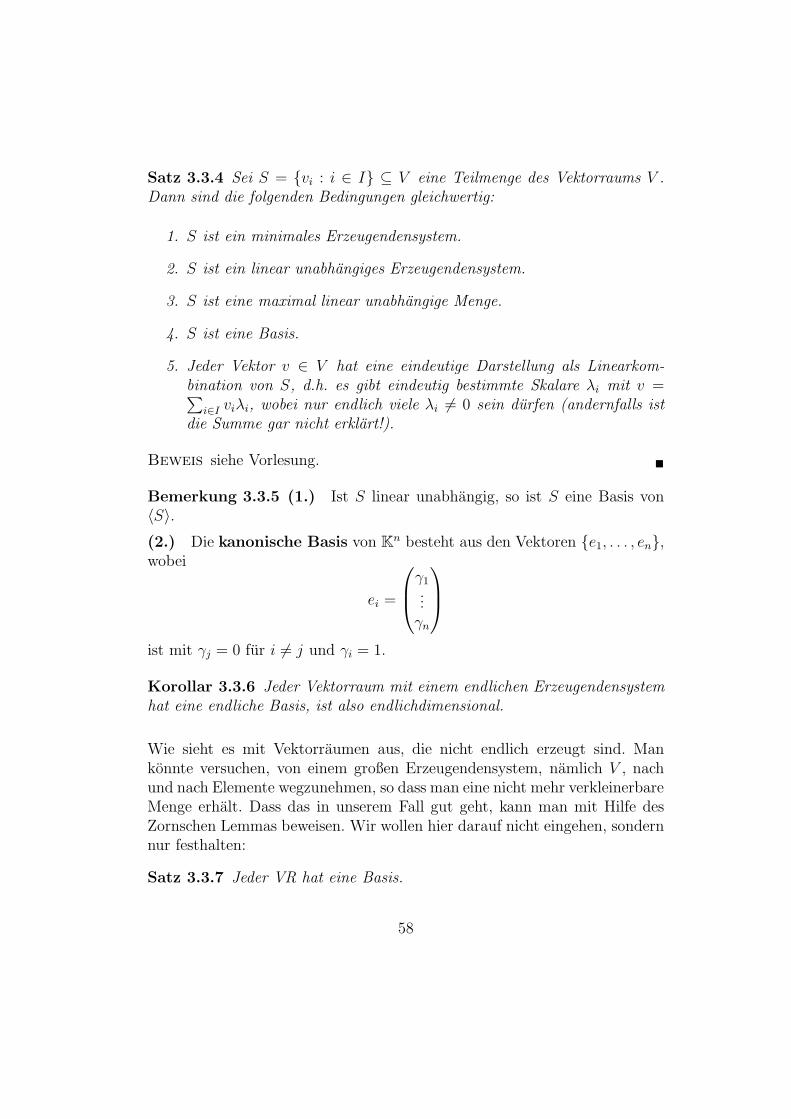
Satz 3.3.4 Sei S = {vi : i ∈ I} ⊆ V eine Teilmenge des Vektorraums V .Dann sind die folgenden Bedingungen gleichwertig:
1. S ist ein minimales Erzeugendensystem.
2. S ist ein linear unabhangiges Erzeugendensystem.
3. S ist eine maximal linear unabhangige Menge.
4. S ist eine Basis.
5. Jeder Vektor v ∈ V hat eine eindeutige Darstellung als Linearkom-bination von S, d.h. es gibt eindeutig bestimmte Skalare λi mit v =∑
i∈I viλi, wobei nur endlich viele λi 6= 0 sein durfen (andernfalls istdie Summe gar nicht erklart!).
Beweis siehe Vorlesung. �
Bemerkung 3.3.5 (1.) Ist S linear unabhangig, so ist S eine Basis von〈S〉.
(2.) Die kanonische Basis von Kn besteht aus den Vektoren {e1, . . . , en},wobei
ei =
γ1...γn
ist mit γj = 0 fur i 6= j und γi = 1.
Korollar 3.3.6 Jeder Vektorraum mit einem endlichen Erzeugendensystemhat eine endliche Basis, ist also endlichdimensional.
Wie sieht es mit Vektorraumen aus, die nicht endlich erzeugt sind. Mankonnte versuchen, von einem großen Erzeugendensystem, namlich V , nachund nach Elemente wegzunehmen, so dass man eine nicht mehr verkleinerbareMenge erhalt. Dass das in unserem Fall gut geht, kann man mit Hilfe desZornschen Lemmas beweisen. Wir wollen hier darauf nicht eingehen, sondernnur festhalten:
Satz 3.3.7 Jeder VR hat eine Basis.
58
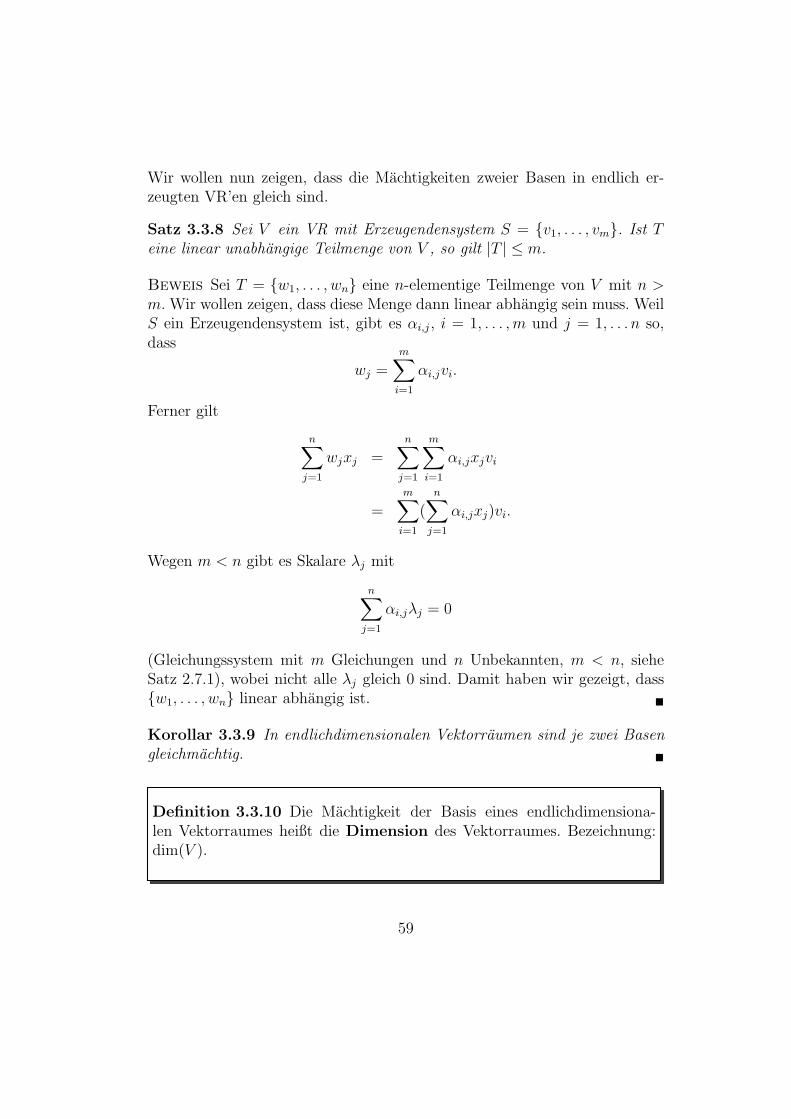
Wir wollen nun zeigen, dass die Machtigkeiten zweier Basen in endlich er-zeugten VR’en gleich sind.
Satz 3.3.8 Sei V ein VR mit Erzeugendensystem S = {v1, . . . , vm}. Ist Teine linear unabhangige Teilmenge von V , so gilt |T | ≤ m.
Beweis Sei T = {w1, . . . , wn} eine n-elementige Teilmenge von V mit n >m. Wir wollen zeigen, dass diese Menge dann linear abhangig sein muss. WeilS ein Erzeugendensystem ist, gibt es αi,j , i = 1, . . . , m und j = 1, . . . n so,dass
wj =
m∑
i=1
αi,jvi.
Ferner gilt
n∑
j=1
wjxj =n
∑
j=1
m∑
i=1
αi,jxjvi
=
m∑
i=1
(
n∑
j=1
αi,jxj)vi.
Wegen m < n gibt es Skalare λj mit
n∑
j=1
αi,jλj = 0
(Gleichungssystem mit m Gleichungen und n Unbekannten, m < n, sieheSatz 2.7.1), wobei nicht alle λj gleich 0 sind. Damit haben wir gezeigt, dass{w1, . . . , wn} linear abhangig ist. �
Korollar 3.3.9 In endlichdimensionalen Vektorraumen sind je zwei Basengleichmachtig. �
Definition 3.3.10 Die Machtigkeit der Basis eines endlichdimensiona-len Vektorraumes heißt die Dimension des Vektorraumes. Bezeichnung:dim(V ).
59

Wir wollen uns jetzt mit den Dimensionen von Unterraumen beschaftigen.Dazu notieren wir noch einmal explizit folgendes Lemma, das wir schon imBeweis von Satz 3.3.4 implizit benutzt haben:
Lemma 3.3.11 Sei S ⊆ V eine linear unabhangige Teilmenge von V . Istv /∈ 〈S〉, so ist auch S ∪ {v} linear unabhangig.
Beweis Angenommen, S∪{v} ist linear abhangig. Dann gibt es vi ∈ S∪{v}und Skalare λi 6= 0, i = 1, . . . n so, dass
∑n
i=1 viλi = 0. Dann muss offenbarv ∈ {v1, . . . , vn} gelten, z.B. v1 = v, da andernfalls S linear abhangig ware.Also gilt
v1 = −
n∑
j=2
vjλj
λ1
und v ∈ 〈S〉, ein Widerspruch. �
Wir halten als Korollar fest:
Korollar 3.3.12 Sei V ein endlichdimensionaler Vektorraum. Ist U � V ,so gilt dim(U) � dim(V ).
Beweis Wir mussen wegen Satz 3.3.8 nur noch zeigen, dass kein echterUnterraum U die Dimension n = dim(V ) haben kann. Das folgt aber ausLemma 3.3.11: Wenn U ein echter Teilraum ist, dann gibt es v ∈ V \U , undv wurde zusammen mit einer Basis von U eine linear unabhangige Mengemit n+ 1 Elementen geben, was nicht geht. �
Korollar 3.3.13 Jede nichtleere Menge S linear unabhangiger Vektoren ineinem endlichdimensionalen Vektorraum V kann zu einer Basis erganzt wer-den, d.h. es gibt T ⊆ V so, dass S ∪ T eine Basis ist. �
Satz 3.3.14 Seien W1 und W2 Unterraume eines endlichdimensionalen Vek-torraums V . Dann gilt die folgende Dimensionsformel:
dim(W1) + dim(W2) = dim(W1 ∩W2) + dim(W1 +W2).
Beweis siehe Vorlesung. �
60

3.4 Rang einer Matrix
Die folgende Frage ist bislang offen geblieben: Ist die zeilenreduzierte Nor-malform eindeutig. Dazu bezeichnen wir den Unterraum von Kn, der von denZeilen einer Matrix A ∈ K(m,n) erzeugt wird, den Zeilenraum von A. Ach-tung: Wir interpretieren Vektoren hier als Zeilenvektoren, nicht, wie sonst,als Spaltenvektoren.
Satz 3.4.1 Zeilenaquivalente Matrizen haben denselben Zeilenraum. Ist Rin zeilenreduzierter Normalform, so bilden die Zeilen von R eine Basis desZeilenraums von R.
Beweis Nach Konstruktion sind die Zeilen einer Matrix in zeilenreduzierterNormalform linear unabhangig, bilden also eine Basis. �
Korollar 3.4.2 Sind A und B zwei zeilenaquivalente Matrizen in zeilenre-duzierter Normalform, so haben sie gleich viele Zeilen 6= 0. �
Definition 3.4.3 Sei A eine Matrix, die zeilenaquivalent zu einer MatrixR in zeilenreduzierter Form ist. Die Anzahl der Zeilen 6= 0 in R heißt derRang von A und ist gleich der Diemension des Zeilenraumes von A.
Korollar 3.4.4 Ist A ∈ K(m,n), so ist der Vektorraum U der Losungen vonAx = 0 ein Unterraum von Kn der Dimension n− Rang(A).
Beweis Sei R in zeilenreduzierter Normalform und aquivalent zu A. Die Pi-votelemente seien an den Positionen (i, ji), i = 1, . . . , r. Setze J = {1, . . . , n}\{j1, . . . , jr}. Das Gleichungssystem sieht also jetzt wie folgt aus:
xj1 +∑
j∈J
γ1,jxj = 0
xj2 +∑
j∈J
γ2,jxj = 0
. . . = . . .
xjr +∑
j∈J
γr,jxj = 0
61

Die xi mit i ∈ J konnen beliebig gewahlt werden; die xi mit i /∈ J sinddadurch eindeutig bestimmt. Also sind die n− r Vektoren, die wir erhalten,wenn wir genau ein xi0 = 1 setzen (i0 ∈ J) und die anderen xi = 0 miti ∈ J \ {i0}, eine Basis des Losungsraums. �
Wir wollen jetzt zeigen, dass A zu genau einer Matrix R in zeilenreduzierterNormalform aquivalent ist. Das rechtfertigt den Begriff Normalform.
Satz 3.4.5 Eine Matrix A ∈ K(m,n) ist zu genau einer Matrix R in zeilen-reduzierter Form zeilenaquivalent.
Beweis Die Zeilen 6= 0 von R seien v1, . . . , vr, die Pivotelemente tretenan den Stellen (i, ji), i = 1, . . . , r, auf. Sei b = (β1, . . . , βn) ein Vektor imZeilenraum von A. Es gilt
b =r
∑
i=1
viβji.
Das zeigt, dass der erste Eintrag 6= 0 in b an einer Stelle j1, . . . jr auftritt.Deshalb sind die ji eindeutig bestimmt: Wir haben die “Pivotspalten” alsoalso als ganz bestimmte Koordinaten von Vektoren im Zeilenraum von Aerkannt, unabhangig davon, durch welche Vektoren dieser Raum gegeben ist.
Im Zeilenraum von R gibt es genau einen Vektor mit βji0= 1 und βji = 0
fur i 6= i0. Dieser Vektor muss die Zeile i0 von R sein, also ist R eindeutigbestimmt. �
Korollar 3.4.6 Matrizen mit gleichen Zeilenraumen sind zeilenaquivalent.
Beweis Seien A und B zwei Matrizen, die zu den Matrizen R und S inNormalform zeilenaquivalent sind. Weil R und S identische Zeilenraume ha-ben, mussen sie (siehe Beweis oben) identische Normalformen haben, alsoR = S. �
3.5 Koordinaten
Wir haben bislang die Vektorraume koordinatenfrei behandelt. Wir wollennun zeigen, wie man einen Vektorraum der Dimension n mittels einer geord-neten Basis B = b1, . . . , bn) koordinatisieren kann.
62

Ist v ∈ V , so wissen wir, dass es eindeutig bestimmte Skalare λ1, . . . , λn gibtmit
v =
n∑
i=1
viλi.
Wir nennen die λi die Koordinaten von v bzgl. der Basis B. Bezeichnung:
[v]B =
λ1
λ2...λn
Ist B = (e1, . . . en) die kanonische Basis bestehend aus den Einheitsvektoren,so gilt
[
x1...xn
]B =
x1...xn
Aber eine andere geordnete Basis ist z.B.
C = (
110
,
201
,
312
).
Dann ist
[
221
]C =
λ1
λ2
λ3
mit
λ1 + 2λ2 + 3λ3 = 2
λ1 + λ3 = 2
λ2 + 2λ3 = 1
Wir losen dieses Gleichungssystem und erhalten
λ3 = 1, λ2 = −1, , λ1 = 1.
63

Seien B und C zwei geordnete Basen
B = (b1, . . . , bn)
C = (c1, . . . , cn)
eines n-dimensionalen Vektorraums. Wir definieren die Matrix
MBC = (αi,j)
in K(n,n), wobei die αi,j so definiert sind, dass
α1,i...
αn,i
= [bi]C
gilt, also∑
αj,icj = bi.
Satz 3.5.1MB
C · [v]B = [v]C.
Beweis Sei
[v]B =
λ1...λn
alson
∑
i=1
biλi = v.
Dann ist
MBC [v]B =
∑
λiα1,i...
∑
λiαn,i
Nun gilt∑
j
cjαj,i = bi.
Wir erhaltenv =
∑
i
biλi =∑
i,j
cjαj,iλi.
Der Koeffizient von cj ist also∑
i λiαj,i, also der j-Eintrag von MBC [v]B, was
zu zeigen war. �
64
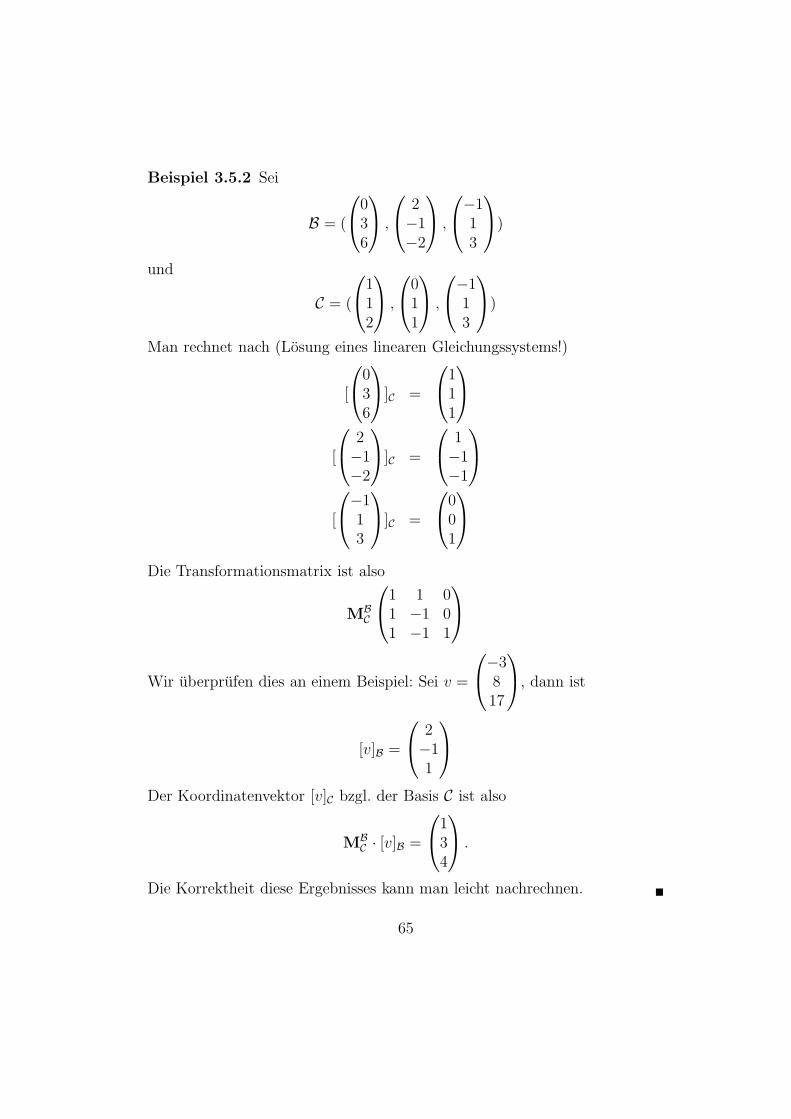
Beispiel 3.5.2 Sei
B = (
036
,
2−1−2
,
−113
)
und
C = (
112
,
011
,
−113
)
Man rechnet nach (Losung eines linearen Gleichungssystems!)
[
036
]C =
111
[
2−1−2
]C =
1−1−1
[
−113
]C =
001
Die Transformationsmatrix ist also
MBC
1 1 01 −1 01 −1 1
Wir uberprufen dies an einem Beispiel: Sei v =
−3817
, dann ist
[v]B =
2−11
Der Koordinatenvektor [v]C bzgl. der Basis C ist also
MBC · [v]B =
134
.
Die Korrektheit diese Ergebnisses kann man leicht nachrechnen. �
65

Korollar 3.5.3MB
C ·MCB = I.
Beweis Es giltMBC ·[v]B = [v]C undMC
B ·[v]C = [v]B. Also giltMBC ·M
CB ·[v]C =
[v]C, also muss MBC ·MC
B = I gelten. �
Korollar 3.5.4 Sei V ein K-Vektorraum der Dimension n, und sei P eineMatrix in K(n,n). Ist B = (b1, . . . , bn) eine geordnete Basis von V , so gibt esgenau eine Basis C mit
[v]C = P · [v]B
fur alle v ∈ V .
Beweis Zur Existenz: Wir suchen eine Basis C = (c1, . . . , cn) mit
∑
j
cjαj,i = bi. (3.1)
In dem Fall ist C ein Erzeugendensystem, und P[bi]B = [bi]C.
Sei dazu P−1 = (βi,j) die Inverse von P. Dann gilt
∑
j
βk,j · αj,i =
{
1 wenn k = i
0 sonst
Wir setzen cj =∑
k bkβk,j. Einsetzen in (3.1) liefert
∑
j
cjαj,i =∑
j
∑
k
bkβk,jαj,i =∑
k
bk∑
j
βk,jαj,i = bi,
was zu zeigen war.
Zur Eindeutigkeit: Die i-te Spalte von P−1 muss [ci]B sein, weil P−1 = MCB
nach Korollar 3.5.3. �
3.6 Zusammenfassung
• Sie haben in diesem Abschnitt die wichtige Definition des Vektorraumesgelernt und Beispiele gesehen.
66
• Sie wissen, was linear abhangig und unabhangig bedeutet.
• Der Begriff der Basis wurde eingefuhrt. Wir konnten zeigen, dass jederendlich erzeugte Vektorraum eine Basis hat. Das gilt auch fur nichtendlich erzeugte Vektorraume, der Beweis erfordert aber tieferliegendeHilfsmittel.
• Sie sollen in der Lage sein, Beispiele von endlich- und von unendlichdi-mensionalen Vektorraumen anzugeben.
• Affine und lineare Unterraume wurden erklart. Sie sollten wissen, dasssolche Unterraume als Losungsmengen (inhomogener) Gleichungssyste-me auftreten.
• Das Kapitel uber affine (Un)abhangigkeit und die affinen Dimensions-formeln wird in der Vorlesung “Lineare Optimierung” wichtig. Der Ex-kurs uber affine Ebenen und die Moulton-Ebene ist nicht so wichtig.
• Der Dimensionsbegriff hat es ermoglicht zu zeigen, dass jede Matrix zugenau einer Matrix in zeilenreduzierter Form aquivalent ist.
• Es wurde eine wichtige Dimensionsformel fur die Dimension der Summezweier Unterraume vorgestellt.
• Sie wissen, wie man einen n-dimensionalen Vektorraum mit Hilfe einergeordneten Basis koordinatisiert. Basiswechsel bedeutet Multiplikationdes Koordinatenvektors mit einer geeigneten invertierbaren Matrix.
Einige Probleme bleiben offen: Ist jeder Unterraum Losungsraum eines li-nearen Gleichungssystems? Wenn ja, gibt es sicherlich verschiedene lineareGleichungssysteme. Wie unterscheiden sie sich?
Wenn man sich den Prozess des Koordinatisierens anschaut, hat man dasGefuhl, das es nur einen n-dimensionalen Vektorraum uber K gibt, namlichden Vektorraum Kn der n-Tupel. Kann man das prazisieren?
Diese beiden Fragen werden durch die Ergebnisse in den nachsten beidenKapiteln beantwortet.
67

Kapitel 4
Lineare Abbildungen
In diesem Abschnitt lernen Sie erstmals eine Klasse von strukturerhalten-den Abbildungen kennen. Diese Konzept ist von zentraler Bedeutung in derAlgebra. Grob gesagt geht es darum, dass wir Vektorraume (oder anderealgebraische Objekte) nicht unterscheiden wollen, wenn sie nur durch eineandere Bezeichnung der Elemente auseinander hervorgehen.
4.1 Definition und Beispiele
Definition 4.1.1 V und W seien K-Vektorraume. Eine Abbildung T :V → W heißt eine lineare Abbildung, falls fur alle v1, v2 ∈ V und alleλ ∈ K gilt:
T(v1 + v2λ) = T(v1) +T(v2)λ.
Beispiel 4.1.2 (1.) Die Identitat idV : V → V ist linear.(2.) Die Abbildung D : K[x] → K[x],
∑n
i=0 cixi 7→
∑n
i=1 icixi ist linear (Dif-
ferenzieren).(3.) Sei T ∈ K(m,n). Dann ist die Abbildung
Kn → Km
v 7→ Tv
linear. Wir konnen also jeder Matrix eine lineare Abbildung zuordnen. �
68

Bemerkung 4.1.3 Es gilt T(0) = 0, weil T(0) = T(0+ 0) = T(0) +T(0).Ferner gilt fur alle v, w ∈ V und alle λ ∈ K
T(vλ) = T(v)λ
T(v + w) = T(v) +T(w).
Der folgende Satz zeigt, dass lineare Abbildungen bereits durch Angabe derBilder einer Basis eindeutig bestimmt sind:
Satz 4.1.4 (Satz von der linearen Fortsetzung) Sei V ein endlichdimen-sionaler K-Vektorraum mit geordneter Basis B = (b1, . . . bn). Sei W ein be-liebiger K-Vektorraum, und seien c1, . . . , cn ∈ W beliebige Vektoren. Danngibt es genau eine lineare Abbildung T : V → W mit T(bi) = ci.
Beweis Zu v ∈ V gibt es eindeutig bestimmte Skalare λi mit v =∑n
i=1 biλi.Dann muss T(v) =
∑n
i=1T(vi)λi =∑n
i=1 ciλi sein. Also ist T eindeutigbestimmt. Man rechnet auch leicht nach, dass die so definierte Abbildung inder Tat linear ist: Sei dazu v =
∑n
i=1 biλi, w =∑n
i=1 biµi und λ ∈ K. Dann
T(v + wλ) = T(n
∑
i=1
bi(λi + µiλ)
=
n∑
i=1
ci(λi + µiλ)
=n
∑
i=1
ciλi + (n
∑
i=1
ciµi)λ
= T(v) +T(w)λ �
Beispiel 4.1.5 Sei B = {b1, b2} mit b1 =
(
21
)
, b2 =
(
11
)
eine Basis von R2.
Ferner seien c1 =
211
und c2 =
001
zwei Vektoren aus R3. Dann ist die
Abbildung
T : R2 → R3
(
21
)
λ1 +
(
11
)
λ2 7→
211
λ1 +
001
λ2
69
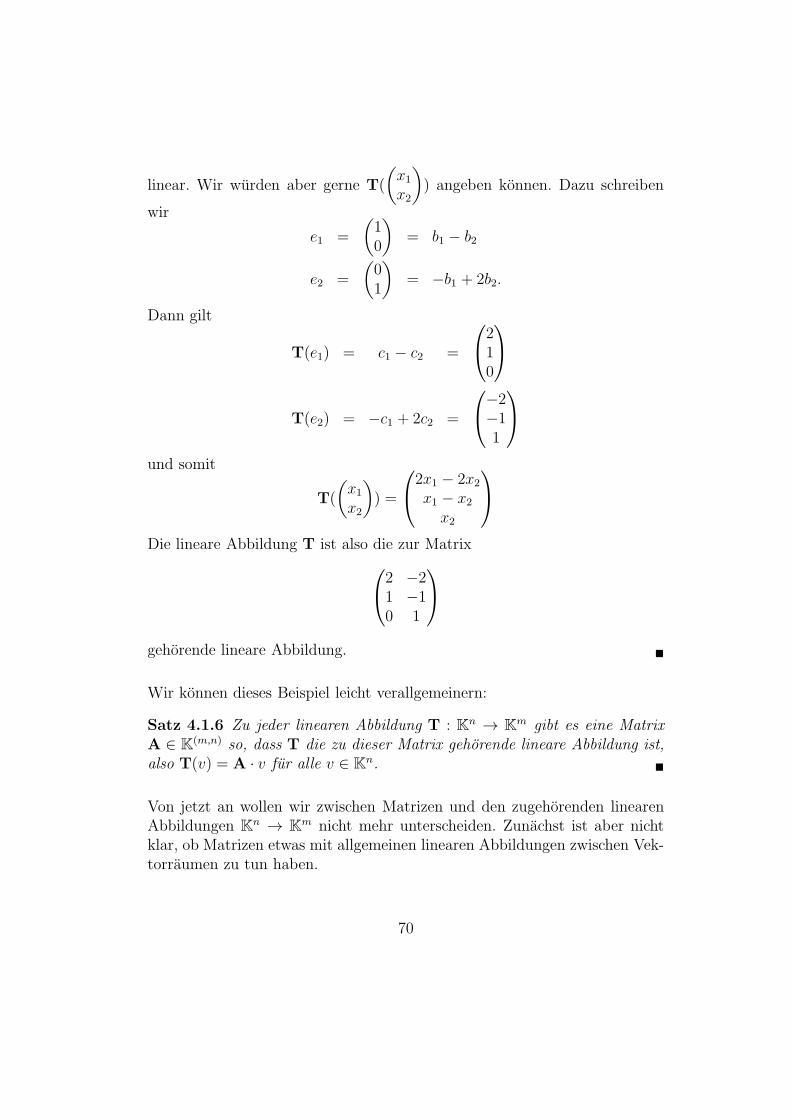
linear. Wir wurden aber gerne T(
(
x1
x2
)
) angeben konnen. Dazu schreiben
wir
e1 =
(
10
)
= b1 − b2
e2 =
(
01
)
= −b1 + 2b2.
Dann gilt
T(e1) = c1 − c2 =
210
T(e2) = −c1 + 2c2 =
−2−11
und somit
T(
(
x1
x2
)
) =
2x1 − 2x2
x1 − x2
x2
Die lineare Abbildung T ist also die zur Matrix
2 −21 −10 1
gehorende lineare Abbildung. �
Wir konnen dieses Beispiel leicht verallgemeinern:
Satz 4.1.6 Zu jeder linearen Abbildung T : Kn → Km gibt es eine MatrixA ∈ K(m,n) so, dass T die zu dieser Matrix gehorende lineare Abbildung ist,also T(v) = A · v fur alle v ∈ Kn. �
Von jetzt an wollen wir zwischen Matrizen und den zugehorenden linearenAbbildungen Kn → Km nicht mehr unterscheiden. Zunachst ist aber nichtklar, ob Matrizen etwas mit allgemeinen linearen Abbildungen zwischen Vek-torraumen zu tun haben.
70

Definition 4.1.7 Sei T : V → W eine lineare Abbildung. Dann definierenwir
Kern(T) := {v ∈ V : T(v) = 0}
Bild(T) := {T(v) : v ∈ V }.
.
Beachten Sie: Kern(T) ⊆ V und Bild(T) ⊆ W . Es gilt sogar noch mehr, dassKern und Bild namlich Unterraume sind:
Lemma 4.1.8 Kern(T) ≤ V und Bild(T) ≤ W .
Beweis Kern(T) 6= { }, weil 0 ∈ Kern(T). Seien v, w ∈ Kern(T), λ ∈ K.Dann gilt T(v + wλ) = T(v) +T(w)λ = 0, also ist v + wλ ∈ Kern(T). DerFall Bild(T) ≤ W geht ahnlich. �
Der Kern der linearen Abbildung, die zu einer Matrix T ∈ K(m,n) gehort, istgenau der Losungsraum von Tx = 0. Der Vektorraum, der von den Spaltenaufgespannt wird, ist genau das Bild von T. Mit Hilfe des Kerns hat maneine sehr schone Charakterisierung von Injektivitat:
Satz 4.1.9 Eine lineare Abbildung T : V → W ist genau dann injektiv,wenn Kern(T) = {0} gilt.
Beweis Klar ist, dass fur eine injektive Abbildung Kern(T) = {0} gilt, dennsonst hatte 0 ∈ W mehr als ein Urbild. Sei nun T nicht injektiv. Dann gibtes v, w ∈ V mit T(v) = T(w), aber v 6= w. Das liefert T(v − w) = 0, also0 6= v − w ∈ Kern(T). �
Es gilt folgende sehr wichtige Dimensionsformel:
Satz 4.1.10 Sei T : V → W eine lineare Abbildung, wobei dim(V ) < ∞.Dann gilt
dim(Kern(T)) + dim(Bild(T)) = dim(V ).
71
Beweis Sei v1, . . . , vk eine Basis von Kern(T). Dann konnen wir v1, . . . , vk zueiner Basis v1, . . . , vn von V erganzen. Wir zeigen, dass dannT(vk+1), . . . ,T(vn)eine Basis von Bild(T) ist. Die Menge {T(v1), . . . ,T(vn)} ist ein Erzeugen-densystem von Bild(T). WeilT(v1) = . . . = T(vk) = 0, ist sogarT(vk+1), . . . ,T(vn)ein Erzeugendensystem von Bild(T). Dieses Erzeugendensystem ist linear un-abhangig: Wenn es linear abhangig ware, gabe es Skalare λk+1, . . . , λn, dienicht alle gleich 0 sind, mit
∑n
i=k+1T(vi)λi = 0. Dann ist aber∑n
i=k+1 viλi ∈Kern(T), d.h. 0 6=
∑n
i=k+1 viλi ∈ 〈v1, . . . , vk〉, Widerspruch zur linearen Un-abhangigkeit der v1, . . . , vn. �
Dieser Satz (und sein Beweis) haben einige interessante Folgerungen:
Korollar 4.1.11 Sei U ≤ V , wobei V ein endlichdimensionaler Vektorraumist. Dann gibt es eine lineare Abbildung T : V → V mit Kern(T) = U .
Beweis Wir wahlen eine Basis von U und erganzen diese zu einer Basis vonV . Wir definieren T nun so, dass T die Elemente der Basis von U auf 0abbildet, die Elemente der Basis, die nicht in U liegen, werden auf Vektoren6= 0 geschickt. �
Korollar 4.1.12 Sei U ≤ Kn. Dann gibt es eine Matrix T ∈ K(n,n) so, dassU = {x ∈ Kn : Tx = 0} gilt. Insbesondere tritt jeder lineare Unterraum desKn als Losungsmenge eines linearen Gleichungssystems auf.
Neben dem Rang einer Matrix T ∈ K(m,n) kann man auch den Spaltenrangdefinieren als die Dimension des von den Spalten von T aufgespannten Un-terraumes von Km definieren. Der Spaltenraum ist genau das Bild der zu Tgehorenden linearen Abbildung. Den zuvor definierten Rang wollen wir, zurUnterscheidung, nun den Zeilenrang nennen. Es gilt:
Satz 4.1.13 Fur T ∈ K(m,n) gilt
Zeilenrang(T) = Spaltenrang(T).
Beweis Wir betrachten die lineare Abbildung T : Kn → Km, die durchdie Matrix T erklart ist. Dann ist offenbar Spaltenrang(T) = dim(Bild(T)).Ferner wissen wir bereits n−Zeilenrang(T) = dimKern(T). Aus der Dimen-sionsformel 4.1.10 folgt die Behauptung. �
72
4.2 Zur Aquivalenz von Matrizen und dem
Begriff Normalform
Wir nennen zwei Matrizen M und N aus K(m,n) Rang-aquivalent (sorrydass so viele Dinge in der Mathematik aquivalent genannt werden!), wenn esP ∈ GL(n,K) und Q ∈ GL(m,K) gibt mit QMP = N. Wir konnen P undQ als Produkt von Elementarmatrizen schreiben. Multiplikation von rechtsmit einer Elementarmatrix bewirkt aber gerade eine Spaltenumformung. Wirkonnen also sagen, dass M und N Rang-aquivalent sind, wenn sie durchelementare Zeilen- und Spaltenumformungen auseinander hervorgehen. JedeMatrix ist also zu einer Matrix
Hr :=
(
Ir 0n−r
0m−r 0m−r,n−r
)
Rang-aquivalent. Offenbar sind Matrizen Hr und Hr′ mit r 6= r′ nicht aqui-valent. Die Aquivalenzklasse wird somit eindeutig durch den Rang bestimmt,und es gibt somit min{m,n} Aquivalenzklassen auf K(m,n) sind Normalfor-men bzgl. der Relation “Rang-Aquivalenz”. Anhand der Normalform kannman sofort ablesen, zu welcher Aquivalenzklasse eine Matrix gehort. Bei kom-plizierteren Relationen ist das sehr nutzlich. Z.B. liefert das Gauß-Jordan-Verfahren eine Normalform fur “Zeilenaquivalenz”. Ferner liefert Zeilenaqui-valenz eine feinere Klasseneinteilung der Menge der Matrizen als Zeilenaqui-valenz: Matrizen, die zeilenaquivalent sind, sind sicherlich auch Rang-aqui-valent, aber nicht umgekehrt. So sind beispielsweise die beiden Matrizen(
1 10 0
)
und
(
1 00 0
)
aquivalent, aber nicht zeilenaquivalent.
Bei der Konstruktion der Normalform Hr werden sowohl Zeilen- als auchSpaltenumformungen erlaubt. Elementare Zeilenumformungen lassen den Zei-lenraum, elementare Spaltenumformungen den Spaltenraum fest. Zeilenum-formungen andern aber den Spaltenraum, Spaltenumformungen den Zeilen-raum! Invariant ist aber die Dimension des entsprechenden Raumes.
4.3 Die transponierte Matrix
An dieser Stelle soll etwas auf den Begriff der transponierten Matrix einge-gangen werden:
73

Definition 4.3.1 SeiA = (α(i,j))i=1,...,m;j=1,...n ∈ K(m,n). Dann heißtA⊺ :=(αj,i)j=1,...,n;i=1,...m ∈ K(n,m) die zu A transponierte Matrix.
Man kann sich fragen, ob A⊺ auch eine interessante lineare Abbildung re-prasentiert, die mit der zu A gehorenden linearen Abbildung etwas zu tunhat. Die Antwort auf diese Frage ist ja, und auch das wird in der Dualitats-theorie (spater) behandelt.
Satz 4.3.2 (1.) (AB)⊺ = B⊺A⊺.
(2.) Rang(A) = Rang(A⊺).
(3.) A ∈ K(n,n) ist invertierbar ⇔ A⊺ ist invertierbar. Dann gilt ferner
(A−1)⊺ = (A⊺)−1.
Beweis (1.) Sei A = (αi,j) ∈ K(m,n) und B = (βi,j) ∈ K(n,p). Dann ist der(i, j)-Eintrag von AB gleich dem (j, i)-Eintrag von (AB)⊺:
(AB)i,j =n
∑
k=1
αi,kβk,j = (AB)⊺j,i
Weiter gilt
(B⊺A⊺)j,i =
n∑
k=1
(B⊺)j,k(A⊺)k,i =
n∑
k=1
βk,jαi,k,
also (AB)⊺j,i = (B⊺A⊺)j,i.
(2.) Das folgt aus “Zeilenrang gleich Spaltenrang”.
(3.) Ubung. �
4.4 Zur Algebra linearer Abbildungen
Satz 4.4.1 Es seien V und W Vektorraume uber K. Sind T und S lineareAbbildungen V → W , und ist λ ∈ K, so ist auch T+Sλ eine lineare AbbildungV → W . �
74
Die Menge aller linearen Abbildungen V → W wollen wir als Hom(V,W )bezeichnen. Die Bezeichnung kommt daher, dass “strukturerhaltende” Ab-bildungen in der Mathematik meistens als Homomorphismen bezeichnet wer-den. In diesem Sinne sind lineare Abbildungen Homomorphismen. Es gilt:
Korollar 4.4.2 Die Menge Hom(V,W ) mit der ublichen Addition und Sk-alarmultiplikation ist ein Vektorraum.
Korollar 4.4.3 Sind V und W endlichdimensionale Vektorraume, so istHom(V,W ) ein Vektorraum der Dimension dim(V ) · dim(W ).
Beweis Sei (b1, . . . , bn) eine Basis von V , und sei (c1, . . . , cm) eine Basis vonW . Dann gibt es genau eine lineare Abbildung Ti,j : V → W mit Ti,j(bi) = cjund Ti,j(bk) 6= 0 fur k 6= i. Diese linearen Abbildungen bilden eine Basis vonHom(V,W ). �
Wir konnen lineare Abbildungen auch hintereinander ausfuhren, und erhaltenso wieder eine lineare Abbildung:
Satz 4.4.4 V,W,Z seien K-Vektorraume. Sind T : V → W und S : W → Zlineare Abbildungen, dann ist auch S ◦T eine lineare Abbildung V → Z.
Beweis Ubung, bzw. einfach. �
4.5 Lineare Operatoren, Endomorphismen
Eine lineare Abbildung T : V → V heißt linearer Operator oder Endo-morphismus.
Der Endomorphismus V → V mit v 7→ 0 fur alle v ∈ V wird auch mit 0V
bezeichnet. Es gilt
Satz 4.5.1 (Endomorphismenring) End(V ) := (Hom(V, V ),+, ◦, 0V , idV )ist ein nichtkommutativer Ring. Ferner ist End(V ) ein Vektorraum und esgilt
(T ◦ S)λ = T ◦ (Sλ) = (Tλ) ◦ S
fur alle λ ∈ K.
75

Bijektive Abbildungen kann man eventuell invertieren. Die inversen Elementevon bijektiven linearen Abbildungen sind wieder linear:
Lemma 4.5.2 Ist T ∈ End(V ) bijektiv, so ist T−1 linear.
Beweis Zu zeigen ist T−1(v + wλ) = T−1(v) + T−1(w)λ. Weil T bijektivist, ist dies gleichbedeutend mit
T(T−1(v + wλ)) = T(T−1(v) +T−1(w)λ)
Das ist aber sicherlich richtig, weil T linear ist. �
Bijektive Endomorphismen auf V heißenAutomorphismen. Die Menge derAutomorphismen auf V schreibt man auch GL(V ).
Bijektive Homomorphismen V → W heißen Isomorphismen. Isomorphis-men bilden linear unabhangige Mengen auf linear unabhangige Mengen ab,und linear abhangige Mengen werden auf linear abhangige Mengen abgebil-det.
Wenn es zwischen V und W einen Isomorphismus gibt, so heißen V undW isomorph, geschrieben V ∼= W . Es konnen nur Vektorraume gleicherDimension isomorph sein!
Satz 4.5.3 V und W seien endlichdimensionaleK-Vektorraume und dim(V ) =dim(W ). Fur lineare Abbildungen T : V → W sind dann die folgenden Be-dingungen aquivalent:
(i) T ist bijektiv
(ii) Kern(T) = {0} (d.h. T ist injektiv)
(iii) Bild(T) = W (d.h. T ist surjektiv)
(iv) T bildet eine gegebene Basis von V auf eine Basis von W ab.
(v) T bildet jede Basis von V auf eine Basis von W ab.
Beweis Siehe Vorlesung. �
Satz 4.5.4 (Hauptsatz uber endlichdimensionale Vektorraume) Ist Vein Vektorraum mit dim(V ) = n, so gilt
V ∼= Kn
76

Beweis Ist v1, . . . , vn eine Basis von V , und ist e1, . . . , en eine (z.B. diekanonische) Basis von Kn, so gibt es nach Satz 4.5.3 eine bijektive lineareAbbildung T mit T(vi) = ei. �
4.6 Darstellung linearer Abbildungen durch
Matrizen
V und W seien K-Vektorraume, und B = (b1, . . . , bn) sei eine geordnete Basisvon V , C = (c1, . . . , cm) sei eine geordnete Basis von W . Fur eine lineareAbbildung T : V → W definieren wir eine Matrix [T]BC ∈ K(m,n) wie folgt:Die i-te Spalte von [T]BC sei [T(bi)]C, der Koordinatenvektor des Bildes von biunter der linearen Abbildung T. Das ist sehr sinnvoll, wie der folgende Satzzeigt:
Satz 4.6.1[T(v)]C = [T]BC · [v]B.
Beweis Sei v =∑n
i=1 biλi, also [v]B =
λ1...λn
. Dann istT(v) =
∑n
i=1T(bi)λi.
Wir schreiben das ElementT(bi) bezuglich der Basis C, d.h.T(bi) =∑m
j=1 cjαj,i.
Mit anderen Worten, [T]BC = (αj,i)j=1,...,m;i=1,...,n. Wir konnen nun T(v) auchbzgl. C darstellen:
T(v) =
m∑
j=1
n∑
i=1
cjαj,iλi,
also
[T(v)]C =
∑n
i=1 α1,iλi
...∑n
i=1 αm,iλi
= [T]BC ·
λ1...λn
�
Die Zuordnung einer Matrix zu einer linearen Abbildung ist sogar ein Vektor-raumisomorphismus. In diesem Sinne kann man etwas ungenau sagen, dasslineare Abbildungen dasselbe sind wie Matrizen.
77

Satz 4.6.2 V und W seien K-Vektorraume mit dim(V ) = n, dim(W ) = m,und B und C seien geordnete Basen von V und W . Dann ist die Abbildung
[ ]BC : Hom(V,W ) → K(m,n)
T 7→ [T]BC(4.1)
ein Vektorraumisomorphismus.
Beweis Die Abbildung [ ]BC ist offenbar linear und injektiv, aus Dimensions-grunden also auch bijektiv. �
Dieser Satz sagt noch nichts daruber aus, ob die Hintereinanderausfuhrungvon linearen Abbildungen auch eine vernunftige Interpretation in der “Ma-trizenwelt” hat. Der nachste Satz sagt, dass dies aber in der Tat der Fallist:
Satz 4.6.3 V , W und Z seien endlichdimensionale K-Vektorraume mit ge-ordneten Basen B, C und D. Wenn T ∈ Hom(V,W ) und S ∈ Hom(W,Z)ist, so gilt
[S ◦T]BD = [S]CD · [T]BC .
Beweis Klar, weil auf der rechten Seite des Gleichheitszeichens eine MatrixM steht mit M · [v]B = [(S ◦ T)(v)]D. Diese Matrix ist aber die nach Satz4.6.2 eindeutig bestimmte Darstellungsmatrix von S ◦ T bzgl. der Basen Bund D. �
Korollar 4.6.4 Es seien V und W endlichdimensionale K-Vektorraume mitgeordneten Basen B und C. Dann gilt fur lineare Abbildungen T : V → W :
T ist bijektiv ⇔ [T]BC ist invertierbar.
In diesem Fall gilt[T−1]CB = ([T]BC )
−1.
Im Fall dim(V ) = dim(W ) = n hat die Zuordnung von Matrizen zu linearenAbbildungen in Hom(V,W ) also noch eine weitere interessante und wichtigeEigenschaft: Die Abbildung (4.1) “respektiert” auch die Ringoperation ◦. Indiesem Sinne spricht man auch von einem Ringisomorphismus. Der Ring derlinearen Operatoren ist also “letztlich” dasselbe wie der Matrizenring.
78

4.7 Basistransformation
Sei wieder T : V → W eine lineare Abbildung. In diesem letzten Abschnittwollen wir uns mit der Frage beschaftigen, welcher Zusammenhang zwischenMatrizen [T]BC und [T]B
′
C′ besteht, wenn sowohl C und B als auch C′ und B′
Basen von W und V sind. Die Frage wird durch folgenden Satz vollstandigbeantwortet:
Satz 4.7.1 Sei T : V → W eine lineare Abbildung. Ferner sollen B und B′
geordnete Basen von V sein, und C und C′ geordnete Basen von W . Mit idVund idW bezeichnen wir die identischen Abbildungen auf V und W . Danngilt:
[T]B′
C′ = [idW ]CC′ · [T]BC · [idV ]B′
B .
Beweis Das folgt unmittelbar aus 4.6.3. �
Bemerkung 4.7.2 Die Darstellungsmatrizen [idV ]BB′ sind genau die Matri-
zen MBB′ aus Abschnitt 3.5.
Wir wollen uns diesen Satz an zwei Beispielen klarmachen:
Beispiel 4.7.3 Wir betrachten die lineare Abbildung
T(
x1
x2
x3
) =
(
x1 + x2
2x3 − x1
)
.
Wenn B und C jeweils die kanonische Basis von R3 und R2 bezeichnet, so gilt
[T]BC =
(
1 1 0−1 0 2
)
Wir suchen nun die Darstellungsmatrix von T bezuglich der geordneten Ba-sen
B′ = (
10−1
,
111
100
),
C′ = (
(
01
)
,
(
11
)
)
79

Wir benotigen dazu die beiden Matrizen
[idR3 ]B′
B und [idR2 ]CC′
Die erste Matrix ist einfach
[idR3 ]B′
B =
1 1 10 1 0−1 1 0
Ferner ist
[idR2 ]CC′ = ([idR2 ]C′
C )−1 =
(
0 11 1
)−1
=
(
−1 11 0
)
(4.2)
Wir erhalten
[T]B′
C′ =
(
−1 11 0
)
·
(
1 1 0−1 0 2
)
·
1 1 10 1 0−1 1 0
=
(
−4 −1 −21 2 1
)
.
Rechnen wir dies am Beispiel v =
310
nach: Es gilt [v]B′ =
111
und
[T]B′
C′ · [v]B′ =
(
−74
)
.
Wir mussen noch
(
−74
)
= [T(v)]C′ uberprufen: Es gilt T(v) =
(
4−3
)
=
−7 ·
(
01
)
+ 4 ·
(
11
)
. �
Beispiel 4.7.4 Wir betrachten die durch
T =
1 0 23 2 11 1 2
in F(3,3)5
definierte lineare Abbildung F 35 → F 3
5 . Gesucht sei
[T]B′
B′ mit B′ = (
100
,
131
,
301
).
80

Ist B die kanonische Basis von F 35 , so gilt
[T]BB =
1 0 23 2 11 1 2
Nun ist
[id]B′
B =
1 1 30 3 00 1 1
und
[id]BB′ =
1 1 30 3 00 1 1
−1
=
1 4 20 2 00 3 1
.
Wir erhalten
[T]B′
B′ =
1 4 20 2 00 3 1
·
1 0 23 2 11 1 2
·
1 1 30 3 00 1 1
=
0 0 01 0 00 1 0
.
Diese Matrix sieht ganz offensichtlich ubersichtlicher aus als [T]BB. Ein wich-tiges Ziel der Linearen Algebra ist es, einfache Darstellungsmatrizen zu fin-den. �
Beispiel 4.7.5 Sei
T =
5 −6 −6−1 4 23 −6 −4
aus R(3,3).
Wir wollen die durch T definierte lineare Abbildung R3 → R3 bezuglich derBasis
B′ = (
201
,
210
,
3−13
)
ausdrucken. Es gilt[T]B
′
B′ = ([id]B′
B )−1 ·T · [id]B′
B .
Wir haben
[id]B′
B =
2 2 30 1 −11 0 3
=: P
81
und
P−1 =
3 −6 −5−1 3 2−1 2 2
Dann
P−1TP =
2 0 00 2 00 0 1
Das kann man leicht nachprufen, denn
T
201
= 2 ·
201
, T
210
= 2 ·
210
, T
3−13
= 1 ·
3−13
.
Definition 4.7.6 Zwei Matrizen M,N ∈ K(n,n) heißen ahnlich, wenn esP ∈ GL(n,K) gibt mit
P−1MP = N
Satz 4.7.7 Ahnlichkeit ist eine Aquivalenzrelation auf Kn.
Beweis Es gilt I−1MI = M, also reflexiv. Wenn P−1MP = N gilt, so giltauch PNP−1 = (P−1)−1NP−1 = M, also ist die Relation auch symmetrisch.Zur Transitivitat: GiltP−1MP = N undQ−1NQ = S, so ist (PQ)−1M(PQ) =Q−1(P−1MP)Q = S. �
Ziel: Finde Normalformen, d.h. auf jeder Aquivalenzklasse bezuglich der Re-lation Ahnlichkeit gebe man einen kanonischen Vertreter an.
4.8 Zusammenfassung
• Sie wissen, was lineare Abbildungen sind, und konnen Beispiele linearerAbbildungen angeben.
• Sie haben gelernt, dass lineare Abbildungen bereits vollstandig durchAngabe der Bilder von Basisvektoren bestimmt sind.
82
• Sie kennen die Definition des Kerns einer linearen Abbildung und dieDimensionsformel dim(Kern(T)) + dim(Bild(T)) = dim(V ).
• Zeilenrang=Spaltenrang
• Jeder Unterraum des Rn ist Losungsraum eines linearen Gleichungssy-stems.
• Sie wissen, was Transponieren fur Matrizen bedeutet.
• Man kann jede lineare Abbildung durch eine Matrix darstellen.
• Der Vektorraum der linearen Abbildungen V → W ist zum Vektorraumder dim(W )× dim(V )-Matrizen isomorph.
• Hintereinanderausfuhrung linearer Abbildungen entspricht Matrizen-multiplikation.
• Sie wissen, was der Endomorphismenring und was GL(n,K) ist. Der En-domorphismenring ist zum Ring der n×n-Matrizen “isomorph” (wobeiwir aber Ringisomorphismen nicht prazise definiert haben).
• Die Injektivitat einer linearen Abbildung T ist gleichbedeutend mitKern(T) = {0}.
• Sie haben gelernt, wie sich Darstellungsmatrizen bei Basiswechsel trans-formieren.
• Sie kennen die Definition von “Ahnlichkeit” von Matrizen und konnenSie vom Begriff der “Aquivalenz” unterscheiden.
83













![TOPOLOGIE - math.uni-konstanz.deplaumann/Topologie14/topologie.pdf · [Mu]J.R.Munkres.Topology:ašrstcourse.ZweiteAužage,PrenticeHall,óþþþ. [Mi]J.W.Milnor.Topologyfromthediıerentiableviewpoint.Univ.Pressof](https://img.pdfslide.net/doc/110x75/5b14468c7f8b9a397c8c3573/topologie-mathuni-plaumanntopologie14topologiepdf-mujrmunkrestopologyasrstcoursezweiteauzageprenticehallobbb.jpg)
![A,~~ ~F}math.uni-pannon.hu/~lhorvath/1.pdf · Q,. ~ ~~a.t;(.A ~ ~ Jw.t~ rl,tfai ~U' (Q-M~.. dt b-al~ ~ pr. ~ 0< fA> f:L ~ A. tj~ j ~ &~k.-~CtA'L ~ 0-. ~ 'P: J/;~ [0(4] ~~ ~k)](https://img.pdfslide.net/doc/110x75/5f26f3887d40774c563b1bb8/a-fmathuni-lhorvath1pdf-q-ata-jwt-rltfai-u-q-m.jpg)














