Embed Size (px)
Citation preview

Illumination Driver
x4
Laser Illumination
Modulation
Illumination Feedback
IlluminationBoard
Sensor+ ADC+Timing Gen(OPT8241)
Depth Engine(OPTA9221)
Quad Data
Depth Data
OPT8241Chipset
Configuration EEPROM
DDR2Power
management and monitoring
USB Tx/Rx(FX2)
CalibEEPROM
SensorBoard
Laptop
To USB Host
Copyright © 2017, Texas Instruments Incorporated
1ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
TI Designs::TIDA-01173高高精精度度 320×240 Voxel 3D 飞飞行行时时间间机机器器人人视视觉觉参参考考设设计计
说说明明
此参考设计由 QVGA 分辨率 3D 飞行时间 (ToF) 传感器
OPT8241 和 ToF 控制器 OPT9221 组成,展示了 TI3D ToF 解决方案在扫地机器人的类似配置和环境下的
性能,此外还探讨了 3D 传感器(积分时间、饱和
度)、信号处理(滤波)和外部红外 (IR) 辐射源对测量
的影响。
凭借 3D ToF 解决方案的距离测量准确性,扫地机器人
能够检测和识别物体并构建房间地图,从而实现最佳路
径选择、缩短工作时间、提高覆盖率、避免作业不完
整、碰撞和卡在障碍物下面。
资资源源
TIDA-01173 设计文件夹
OPT8241 产品文件夹
OPT9221 产品文件夹
咨询我们的 E2E™ 专家
特特性性
• 320×240 像素 (30fps) 可确保:
– 准确检测物体
– 系统性线路规划
– 防撞
– 避免卡住
• 主动红外照明允许日间和夜间均可工作
• 距离测量误差 <0.1%
应应用用
• 扫地机器人
• 割草机器人
• 服务机器人
• 类人机器人
该 TI 参考设计末尾的重要声明表述了授权使用、知识产权问题和其他重要的免责声明和信息。

System Description www.ti.com.cn
2 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
1 System Description
Typically, a vacuum robot has a "blind" approach, which consist of driving in one direction until hitting onobstacle or detecting the obstacle just before collision. Then the robot change direction and repeat thesame operation. This method is easy to implement but presents several drawbacks. First, it is not efficientas the robot has to vacuum for a longer time with no assurance that the complete area will be properlyvacuumed. The risk of collision is high (sometimes even built in the vacuuming scheme), resulting inpotential damage for both the robot and the obstacle. The robot also has a high chance of getting stuckunder furniture or falling down a stairway. One solution is to build a robot-friendly environment.
图图 1. Vacuum Robot Path
Vacuum robot vision can be improved due to 3D Time of Flight (ToF) technology, which enables the robotto accurately detect and recognize object at distance as well as being able to map then environment. Thistechnology allows the robot to establish the best vacuuming path, optimizing surface coverage andvacuuming time as well as avoiding collision, fall, and getting stuck.
The sensor technology is developed in standard CMOS, allowing systems to achieve very high integrationat a low cost.
The 320×240 pixel resolution as well as the 74.4 (H) × 59.3 (V) field of view (FOV) allow the robot todetect objects and map areas accurately.
This reference design shows the performance of the TI 3D ToF in a similar configuration and environmentof a vacuum robot as well as looks at the influence of the 3D sensor (integration time, saturation), signalprocessing (filtering), and an external Infrared (IR) source on the measurement.

www.ti.com.cn System Description
3ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
1.1 Key System Specifications
表 1 shows the key specification for this reference design.
表表 1. Key System Specifications
PARAMETER SPECIFICATIONTarget application Robot navigation and mappingCamera placement 10 cm above floorImage resolution 320×240 pixel arrayFrame rate 30 frames per secondsDistance measurement accuracy < 0.01%Field of view 74.4 (H) × 59.3 (V)Optical wavelength 850 nmIllumination source type Four modulated near Infrared (NIR) laserToF sensor OPT8241ToF controller OPT9221Sensor range Up to 5 mSupply voltage 5-V DC at 1.2-A adaptorWorking environment IndoorOperating condition 0ºC to 40ºC

Illumination Driver
x4
Laser Illumination
Modulation
Illumination Feedback
IlluminationBoard
Sensor+ ADC+Timing Gen(OPT8241)
Depth Engine(OPTA9221)
Quad Data
Depth Data
OPT8241Chipset
Configuration EEPROM
DDR2Power
management and monitoring
USB Tx/Rx(FX2)
CalibEEPROM
SensorBoard
Laptop
To USB Host
Copyright © 2017, Texas Instruments Incorporated
System Overview www.ti.com.cn
4 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
2 System Overview
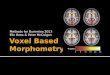
2.1 Block Diagram
图图 2. Block Diagram
2.2 Highlighted Products
This reference design uses the OPT8241EVM, which mainly consist of two parts: the QVGA-Resolution3D ToF sensor OPT8241, and the ToF controller OPT9221.
If a lower resolution is needed, use instead the OPT8320, a 80×60 resolution, QQQVGA 3D ToF Camera(sensor + controller).

www.ti.com.cn System Overview
5ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
2.2.1 OPT8241
The OPT8241 ToF sensor is part of the TI 3D ToF image sensor family. The device combines ToFsensing with an optimally-designed analog-to-digital converter (ADC) and a versatile, programmable timinggenerator (TG). The device offers quarter video graphics array (QVGA 320 × 240) resolution data at framerates up to 150 frames per second (600 readouts per second). The built-in TG controls the reset,modulation, readout, and digitization sequence. The programmability of the TG offers flexibility to optimizefor various depth-sensing performance metrics (such as power, motion robustness, signal-to-noise ratio,and ambient cancellation).
• Imaging array:
– 320 × 240 array
– 1/3" optical format
– Pixel pitch: 15 µm
– Up to 150 frames per second
• Optical properties:
– Responsivity: 0.35 A/W at 850 nm
– Demodulation contrast: 45% at 50 MHz
– Demodulation frequency: 10 MHz to 100 MHz
• Output data format:
– 12-bit phase correlation data
– 4-bit common-mode (ambient)
• Chipset interface: Compatible with TI's TFC OPT9221
• Sensor output interface: CMOS data interface (50-MHz DDR, 16-lane data, clock, and frame markers)
• LVDS:
– 600 Mbps, three data pairs
– 1-LVDS bit clock pair, 1-LVDS sample clock pair
• Optical properties of timing generator (TG):
– Addressing engine with programmable region of interest (ROI)
– Modulation control
– De-aliasing
– Master, slave sync operation
• I2C slave interface for control
• Power supply:
– 3.3-V I/O, analog
– 1.8-V analog, digital, I/O
– 1.5-V demodulation (typical)
• Optimized optical package (COG-78):
– 8.757 mm × 7.859 mm × 0.7 mm
– Integrated optical band-pass filter (830 nm to 867 nm)
– Optical fiducials for easy alignment

System Overview www.ti.com.cn
6 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
• Operating temperature: 0°C to 70°C

www.ti.com.cn System Overview
7ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
2.2.2 OPT9221
The ToF controller (TFC) is a high-performance, 3D ToF sensor companion device that computes thedepth data from the digitized sensor data. Depth data are output through a programmable complementarymetal-oxide-semiconductor (CMOS) parallel interface. In addition to depth data, the TFC provides auxiliaryinformation consisting of amplitude, ambient, and flags for each pixel. This information can be used toimplement filters and masks and to dynamically control the system configuration for the intendedperformance. The TFC supports a wide range of binning and ROI options that help optimize the datathroughput that must be handled. The 9-mm × 9-mm NFBGA package enables small form-factor, 3D, ToFsystems that can be embedded into a variety of end equipment.
• QVGA 3D TFC: Up to 120 fps
• Depth data:
– 12-bit phase
– Up to 12-bit amplitude
– Up to 4-bit ambient
– Saturation detection
• Chipset interface: Compatible with TI ToF sensor (OPT8241)
• Output (CMOS, 8-lane data, 8 control signals, and clock):
– Digital video protocol (DVP)-compatible: Data, VD, HD, clock
– Synchronous serial interface (SSI)-compatible
• Depth engine:
– Pixel binning
– Region of interest (ROI)
– De-aliasing
– Non-linearity correction
– Temperature compensation
– High dynamic range operation
– Spatial filter
• Timing coordinator:
– Sensor control
– Master and slave sync operation
• I2C slave interface
• Power supply: 1.2-V core, 1.8-V I/O, 3.3-V I/O 2.5-V analog
• Package: 256-pin, 9-mm × 9-mm NFBGA
• Operating temperature: 0°C to 85°C

System Overview www.ti.com.cn
8 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
2.2.3 Companion Device
The heart of any robot vacuum control unit is the processor, and TI’s system-optimized Sitara™processors are designed for flexible, fast design in vacuum robot applications. Based on Arm® Cortex®-Acores, Sitara processors provide an expansive list of flexible peripherals, connectivity, and unified softwaresupport to cover a wide set of robotic vacuum operational requirements and applications. A broad portfolioof single- and multicore devices provides a selection of processor options that offers the optimal balanceof integration, connectivity, and performance for every vacuum robot application and subsystem.Furthermore, a fully-scalable software platform enables a unified software experience for simplifieddevelopment and code migration across all Sitara processors and TI digital signal processor (DSP)families. Pin-compatible options within these processor families make hardware upgrades virtuallyseamless.
表表 2. Processor Options
PARAMETER AM335x AM437x AM57x
Core Cortex-A8 up to 1 GHz Cortex-A9 up to 1 GHz1× or 2× Cortex-A15 up to 1.5 GHz1× or 2× C66x DSP up to 750 MHz
DMIPS (max) 2,000 2,500 10,500
Multimedia SGX530 SGX530 1× or 2× SGX544 3D, GC320 2D,IVA HD video accelerator
Co-processors Dual-core PRU-ICSS Quad core PRU-ICSS Quad-core PRU-ICSS, dual-coreArm Cortex-M4
Memory LPDDR1/DDR2/DDR3(L) LPDDR2/DDR3(L) 1× or 2× 32-bit DDR3(L)
OS Linux, Android, TI-RTOS Linux, TI-RTOS Linux, TI-RTOS, Android™, WinCE2013
Key features LCD controller, CAN, Gb EMACswitch, 2× USB with PHY
Display subsystem, dualcamera, QSPI, Gb EMACswitch, 2× USB with PHY
Display subsystem, USB3, SATA,PCIe, video inputs, HDMI, threeLCD outputs
When coupled with built-in hardware acceleration (crypto, 2D or 3D graphics, and video), native industrialcommunications subsystem (ICSS) protocol support, and the extensive software libraries available from TIand its third parties, time to market can be dramatically reduced.
TI’s Processor SDK provides a common user interface and software platform for all Sitara devices, whichgreatly leverages engineering resource investment across multiple Sitara Arm-based devices and familiesof devices. Furthermore, this Processor SDK also incorporates the Voxel SDK as one of many built-insoftware components, thereby reducing the number of diverse software modules that must be integratedby a platform developer. The variety of general-purpose and industrial EVMs—combined with ProcessorSDK bring-up, application, and feature-demonstration software—all contribute to a truly productive out-of-box experience for vacuum robot developers.
By enabling users and developers to seamlessly develop on, and across, multiple Sitara (and even DSP)product lines, designers are afforded unencumbered options in their choice of optimum TI processordevices. The choice of solutions can be made purely on the desired peripheral set (SPI, McSPI, CSI,USB2/3, CAN, McASP, GbE switching, PCIe, SATA, and so on), core speed (300 MHz to 1.5 GHz), andcore technology (Cortex-A8, Cortex-A9, Cortex-A15, C66x DSP). Within each family of Sitara devices,further cost-saving may be achieved by reducing the number of unneeded features or cores—all withincommon pin-compatible packages.

2dToF
c
Pulsed IR ray
Reflection
¥ ¥¶
Far Close
Copyright © 2017, Texas Instruments Incorporated
www.ti.com.cn System Overview
9ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
2.3 Design Considerations
表表 3. Design Considerations
KEY PARAMETER 3D TOF TECHNOLOGY AND OPT8241/OPT9221ADVANTAGE
Object detection and collision avoidance 320 × 240 pixels at 30 fps enables detection of chair legs andwires
Planned navigation based on map (SLAM)Good depth resolution sufficient for room mapping and toexecute planned pathLower cost 80×60 model also available
Self docking and recharging High pixel count and depth enable automatic alignment fordocking and self-recharge
Multi-robot operation Programmable modulation frequency enables crosstalksuppression through frequency separation
Operate in dark Active IR illumination allows operation in both daylight and indark for fully automated warehouses
Minimum host CPU loadSimultaneous excellent close and far range accuracy
Depth map extraction, calibration/correction in H/WHardware HDR
2.4 System Design Theory
2.4.1 What is 3D ToF
The 3D ToF sensor captures an array of pixels mapping the information on the 2D and adds the distanceas a third dimension, allowing a device to have a robust scene recognition and feature extraction,overcoming the following major challenges of a 2D camera:
• Variation in contrast
• Background noise
• Ambient light
2.4.2 How Does 3D ToF Work
A 3D ToF camera emits a modulated IR signal and observes the reflected light (see 图 3). The phase shiftbetween the emitted and received light can then be translated as distance using 公式 1
图图 3. 3D ToF Sensing
(1)
For more details on the theory of ToF as well as comparison between ToF and other technologies, seeTime-of-Flight Camera—An Introduction .

d
B Acc A2 2 f
�V u
S
System Overview www.ti.com.cn
10 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
While the phase shift is used to calculate the distance, the amplitude of the light received can also beused to weight the distance measurement.
2.4.3 Image Quality and Trade-offs
TI's 3D-ToF solution can be used in a variety of applications, but designing a system can require trade-offs in design choices to meet application requirements. These trade-offs are probably best understood bylooking at 公式 2 based on system noise properties. 公式 2 measures noise and assumes shot noise,which has a Poisson distribution, and a Gaussian error propagation. From the equation, high modulationfrequency (f), high modulation contrast (cd), and high received amplitude (A), all contribute to increasedaccuracy; however, high offset (B) reduces accuracy.
(2)
where:
• A is largely a function of the transmitted optical power
• B is largely a function of the ambient light
• f is a function of the imager silicon, the speed of electronics, and the power consumption
• cd is largely a function of quality of imaging sensor, light source and modulation power
2.4.3.1 Amplitude
The amplitude (A) is related to the reflected intensity. The greater the amplitude, the greater the accuracy.To boost the received amplitude, higher illumination power can be used, but at the cost of increasedpower consumption and saturation risk.
The light intensity has a 1/d2 relationship with the distance (one way) and is affected by the target’sreflectivity. The illuminating power is spread over the scene as defined by the FOV, so a larger FOV alsoreduces the received amplitude.
The lens and filters also play an important part. Vignetting reduces the intensity around the border.
The environment where the ToF operates is also important. For open-air or vacuum operation, this islargely a nonissue; however, underwater, raining, or foggy conditions could impact performance.
Higher modulation voltage increases the photoelectron collection efficiency, therefore indirectly increasingthe amplitude measured.
A higher integration period also increases amplitude because it leads to greater number of photoelectronscollected. However, increasing the integration period reduces the maximum frame rate. As amplitude ishighly influential on the accuracy of the phase measurement, during the processing of the phaseinformation, the amplitude data can be used to measure the accuracy of the information by using aweighted average during the room mapping and object recognition.
2.4.3.2 Offset
The offset (B) is largely due to two factors: ambient light and dark current. The lower the offset, the greaterthe accuracy.
High ambient intensity such as sunny outdoor conditions can lead to saturation. Filters that reduce oreliminate spectrum outside of near Infrared (NIR) (850 nm to 870 nm) can help reduce saturation. Butsunlight has plenty of energy in the NIR spectrum to cause saturation if care is not taken.

www.ti.com.cn System Overview
11ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
The offset also contains temperature-related components. Dark current is caused by loose electronsgenerated in the sensor silicon from thermal energy. High temperature can lead to more electrons. Duringthe modulation process, these temperature-induced charges are collected along with the photoelectrons,contributing to the offset.
2.4.3.3 Modulation Frequency
The modulation frequency defines how fast the illumination and photonic mixer are switched. The higherthe modulation frequency, the better. Because ToF sensors determine distance based on the phasedifference between the illumination and the reflection, given the phase-shift, the distance it corresponds tois shorter if the frequency is higher. Shorter distance means higher accuracy.
Higher modulation frequency comes at the cost of higher power consumption.
2.4.3.4 Modulation Contrast
The effective modulation contrast is a unit-less parameter between 0 to 1; the higher the better. There aretwo modulation contrast parameters to consider: one related to the illumination, the other related to theimaging silicon.
For illumination, the modulation contrast defines how fast the illuminator can switch the light on and off. Asfrequency goes pass the roll-off frequency, the switch ability begins to wane, resulting in optical powerattenuation. A typical NIR LED has a roll-off frequency of ≈ 20 MHz. Laser has a higher roll-off frequencyof ≈ 100 MHz.
The modulation contrast for a ToF sensor defines how efficiently the sensor converts and collectsphotoelectrons. As such, modulation contrast is largely a performance parameter of the sensor silicon.However, a higher mixing voltage (Vm) can increase photoelectron collection, thereby increase themodulation contrast. However, this comes at a price of higher power consumption. A typical roll-offfrequency for a ToF sensor is around 30 MHz to 50 MHz. The DepthSense™ sensor is based on CAPD,which is capable of high modulation contrast.
The effective modulation contrast for the "quality" equation is the lower of the two. The lower of the twocutoff frequencies also limits the maximum modulation frequency.
2.4.4 Filtering
Similarly for 2D cameras, signal processing can be used to reduce the variation of pixels. 3D ToF sensorscan benefit from three types of filters: temporal filters, spatial filters, and 3D filters.
Temporal filters process each pixel based on its values over time. The primary purpose is to reduce outputvariation over time.
Spatial filters process each pixel based on a two-dimensional neighborhood around it. The primarypurpose is to reduce output variation over a pixel’s local neighborhood.
3D filters are applied to point clouds; these filters tend to be application-specific, and are not addressed inthis reference design. Instead, this design focuses on temporal and spatial filters useful for enhancingphase data and improving depth accuracy.
For more details on filtering, see Filtering for 3D Time-of-Flight Sensors

5 Out
sort
3,4,4,5,5,6,6,7
average
6 4 5
7 5 3
4 6 5
5
2 5 9 7 2
2 2 5 7 9
Out
In
4.5
Sort
Average
System Overview www.ti.com.cn
12 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
2.4.4.1 Temporal Filter
Temporal median filters, or sometimes called median average filters, require a FIFO—larger the FIFOsize, stronger the filtering. To compute the filter output, the FIFO is first sorted; then the central values, ormedian values, are averaged and outputted. Averaging of central values is unnecessary if a single medianvalue is used.
图图 4. Temporal Filter
Note that the sorting helps to remove outliers, and output is a real measurement, not an interpolated one.Usually a three- or five-deep FIFO is sufficient for good filter performance. An excessively large FIFOintroduces noticeable delay. This reference design uses a five-deep FIFO.
2.4.4.2 Spatial Filter
The spatial filter is a smoothing filter, where the pixel's output is the median or the average value of itsneighboring pixels.
图图 5. Spatial Filter
Output is a real measurement, not an interpolated one. Usually a 3×3 or a 5×5 matrix is sufficient for goodperformance. An excessively large matrix introduces noticeable delay. This reference design uses a 3×3matrix.

www.ti.com.cn System Overview
13ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
2.4.4.3 Flying Pixel Filter
3D ToF sensors exhibit a unique artifact called "flying pixels", most evident in the point cloud image.These pixels tend to be where depth discontinuities are. A flying pixel is an analog effect caused by borderpixels spending part of the time measuring the foreground depth, part of the time measuring thebackground depth, resulting in depth measurements that are somewhere in between. An easy way toremove flying pixels is to use the Sobel operator.
No flying pixel filter is implemented in this reference design.
2.4.5 Parameters and Profile
The profile set in the OPT8241-CDK-EVM used during the tests is critical to get accurate performance.
The MetrilusLongRange profile (the default one from the OPT8241-CDK-EVM) is used as a base profile,where only the integration time and the common phase calibration parameters are changed. The followingsections explain why these parameters are change.
For more details on calibration and profile, refer to the Voxel Viewer Quick Start Guide.
2.4.5.1 Calibration
The calibration profile includes the following calibrations:
• Lens calibration: Find radial and tangential distortions so the pin-hole camera model can be used tocompute point clouds from depths.
• Frequency calibration: Compensate distance error arise from the frequency error.
• Non-linearity calibration: Compensate for non-linearity from an imperfect sinusoid.
• Common-phase calibration: Determine common-phase offset at the center of the image and correlatethat phase to a known distance.
• Pixel-wise calibration: Determine expected additional offsets for off-center pixels so distance to off-center pixels can be correlated.
• Temperature calibration: Compensate for phase drift from temperature.
The calibration parameters used in this reference design are the default ones from the MetrilusLongRangeprofile, at the exception of the common-phase calibration, that must be performed if the integration time ischanged.
For this reason, the common-phase calibration is performed for integration times of 31%, 16%, and 8%.
This calibration is then giving the values for phase_corr1 and phase_corr2 for each of the integration time,or the values to put in hdr_phase_corr1 and hdr_phase_corr2 if HDR is used.
2.4.5.2 Integration Time
Integration time is the time during which the sensor demodulation and the illumination modulation areactive. The integration time has a major influence in the performance. A higher integration periodincreases the amplitude as it leads to a greater number of photoelectrons collected. However, increasingthe integration period also increases the saturation sensibility.
The default value for the integration time in the MetrilusLongRange profile is 28%; the highest value forthis parameter is 31%.

System Overview www.ti.com.cn
14 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
As seen in 节 2.4.3.1, the longer the integration time, the higher the accuracy. Hence, 31% is used inthese tests as the default value.
Further tests are conducted with 16% and 8% integration time values to evaluate the impact of theintegration time on the accuracy and on the saturation.

hdr_frm_intg_scale
Normal frame integration timeHDR frame integration time
2
Low Integration
time
High Integration
time
Low Integration
time
High Integration
time
Low Integration
time
Low Integration
time
High Integration
time
Low Integration
time
High Integration
time
Low Integration
time
Low Integration
time
High Integration
time
Low Integration
time
High Integration
time
Low Integration
time
FIFO
www.ti.com.cn System Overview
15ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
2.4.5.3 HDR
As discussed in 节 2.4.5.2, integration time influences the accuracy and the saturation risk. To have bothgood accuracy and low risk of saturation, one can implement a scheme where frames are taken withalternatively high and low integration time. This scheme allows a great performance at close and longranges.
To implement this, one way is to have the host to change the integration time and the calibration values(see 节 2.4.5.1). However, in this method, the frames that are captured while the parameters are beingchanged have to be discarded. This means that the frame rate is heavily impacted.
The alternative and better way of implementing this is to use the high dynamic range (HDR) functionality,which allows alternate frames to use different integration times without losing frames.
The HDR filter embeds a two-element FIFO to receive the incoming frames with alternate exposures. Thefirst frame in insufficient to compute HDR and is just a pass-through.
图图 6. HDR
The HDR frame’s integration time is scaled down as compared to a normal frame by a factor, which is thereason why the integration times tested in the 3.2 节 are 31%, 16%, and 8%.
(3)

Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
16 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
3 Hardware, Software, Testing Requirements, and Test Results
3.1 Required Hardware and Software
3.1.1 Hardware
The OPT8241-CDK-EVM is used to conduct these tests (see 图 7). To connect the hardware, follow thesesteps:1. Connect the 5-V DC power to the connect to J3.2. Connect the board to the PC using the micro-USB cable.3. Check that the Illumination LED is red.4. Use the switch SW2 to turn on the board (to the right).5. Check that the master LED is green and the chipset LED is blue.
图图 7. OPT8241-CDK-EVM

www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
17ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
3.1.2 Software
This section describes how to set up the computer to make use of the OPT8241-CDK-EVM. At the time ofthis writing, the authors have only tested the versions noted in this section. Different hardware platformsand software versions can be used, but the authors have not verified any other options.
The Voxel Viewer is a graphical application developed by TI to evaluate easily the 3D ToF capabilitiesusing the OPT8241-CDK-EVM. The Voxel Viewer includes the Voxel SDK, which is a set a C/C++ librariesto facilitate development and time-to-market. For more information, refer to the Voxel Viewer Quick StartGuide .
3.1.2.1 Getting Started with the Software
This section describes how to set up the needed software on a PC with the Windows® operating system.At the time of this writing, the authors have only tested the versions noted in this section. Differenthardware platforms and software versions can be used, but the authors have not verified any otheroptions.
To set up the software, first install the following major parts:
• Voxel Viewer v0.9.8
• Anaconda v2.7
• Qt 5.4.2
• PCL1.7.2
• Voxel SDK v0.6.3
3.1.2.2 Voxel Viewer
The 0.9.8 version of the Voxel Viewer is used to capture the voxel files (.vxl) for each of the test setupsdiscussed in 3.2 节.
This version is also used to set the parameters of the OPT8241 and OPT9221 devices as well as toperform the calibration.
For more details, refer to the Voxel Viewer Quick Start Guide.
3.1.2.3 Python
Additionally to the C/C++ libraries, the Voxel SDK provides some pre-built libraries that enable support forthe Python language. The Voxel SDK makes use of SWIG to build Python interface to the low-level C/C++libraries. The Voxel Viewer leverages the Python interface and makes use of Pyside (that is, a binding forthe Qt libraries) for the graphical user interface (GUI). For more information, see the Voxel SDK wiki.
Python scripts are used to post-process the voxel files captured with the Voxel Viewer and extract the rawdata and save it as a .bin file for further analysis in MATLAB®. To use the Python script, refer to the"VXLExtractALL_v1.x_readme.txt" file provided as part of this reference design.
3.1.2.4 MATLAB®
MATLAB scripts are used to post process the raw data captured as well as filtering and performanceanalysis.

Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
18 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
For filtering, a five-deep temporal filter and a 3×3 spacial filter are implemented. For the performanceanalysis, the data are displayed in 3D as well as looking at the standard deviation of some pixels and theirevolutions through the frames.

www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
19ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
3.2 Testing and Results
3.2.1 Test Setup
3.2.1.1 Test Equipment
表 4 lists the equipment used to test this reference design.
表表 4. Test Equipment
TEST EQUIPMENT DESCRIPTIONToF sensor OPT8241-CDK-EVMEVM holder Edmund OpticsLaser distance measurement Kaleas LDM 500-60Infrared illuminator RAYMAX 25Laptop DellRoom 4.2 m × 3.6 m, 5.2 m diagonal, 3.15 m highTarget Wooden chairs

Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
20 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
图 8 shows the EVM holder built to position the sensor at a similar height than a vacuum robot.
图图 8. EVM Holder and Laser Distance Measurement Setup

www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
21ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
3.2.1.2 Test Setup
图 9 shows the room used to conduct every test.
图图 9. Test Room

4.2 m
3.6 m
4.908 m
0.743 m3.056 m
Chair 1
Chair 2
OPT8241-CDK-EVM
Copyright © 2017, Texas Instruments Incorporated
Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
22 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
Most of the tests are performed with the OPT8241-CDK-EVM and the targets are positioned as shown in图 10. The exception is the saturation tests, which are positioned as shown in 图 40 and 图 41.
图图 10. Room and Targets Distance (Position 1)
3.2.2 Integration Time
In this section, the influence of the integration time on the performance is tested with integration timevalues of 31%, 16%, and 8%.
The figures on the right side are the front view, while the one on the left side are the same figure with a90° rotation down to visualize the value of the phase measured.
From 图 11 to 图 16, the frame displayed is the 25th frame.

www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
23ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
图图 11. Front View—31% Integration Time 图图 12. Bottom View—31% Integration Time
图图 13. Front View—16% Integration Time 图图 14. Bottom View—16% Integration Time
图图 15. Front View—8% Integration Time 图图 16. Bottom View—8% Integration Time

Ch1Ch2
Wall
Floor
Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
24 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
As expected, a lower integration time creates more noisy pixels. 图 17 shows some pixels at differentplaces on the pictures, and 表 5 lists their evolutions through the frames at the mean values as well astheir standard deviation.
图图 17. Location of Pixels (Position 1)
表表 5. Phase and Distance Measurement
PIXEL /INTEGRATION TIME (%) X Y MEAN PHASE MEAN
DISTANCE (m)STANDARDDEVIATION
DISTANCESTANDARD
DEVIATION (cm)Chair 1 / 31 125 80 312.768 0.763 1.750 0.427Chair 1 / 16 125 80 307.188 0.749 2.106 0.514Chair 1 / 8 125 80 315.129 0.769 3.552 0.867Chair 2 / 31 175 100 1266.600 3.090 8.114 1.980Chair 2 / 16 175 100 1261.500 3.078 12.357 3.015Chair 2 / 8 175 100 1269.500 3.097 23.832 5.814Wall / 31 245 60 1695.300 4.136 14.928 3.642Wall / 16 245 60 1688.200 4.119 29.728 7.253Wall / 8 245 60 1681.500 4.102 188.755 46.051
Floor / 31 250 150 544.597 1.329 458.889 111.956Floor / 16 250 150 799.940 1.952 635.612 155.071Floor / 8 250 150 946.315 2.309 727.578 177.508
Note that the mean distance is expressed in meters, while the distance standard deviation is expressed incentimeters.
The standard deviation is below 0.1% of the distance for all the scene except for the floor, where a bigstandard deviation is measured. This is because the angle between the 3D ToF sensor and the floor is sothat the direct reflection from the floor is really weak. If needed, the 3D ToF sensor can be tilted forward tohave a better reflection and create a better accuracy for the floor measurement.

www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
25ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
3.2.3 Filtering
In this section, the influence of filters on the measurements is tested. The phase measurements inputtedin the filters are the same than discussed in 节 3.2.2.
The filter here consists of a temporal filter over five frames as well as a spacial filter with a 3×3 matrix. Thefigures on the right side are the front view, while the one on the left side are the same figure with a 90°rotation down to visualize the value of the phase measured.
From 图 18 to 图 23, the frame displayed is the 25th frame.
图图 18. Front View—31% Integration Time (Filtered) 图图 19. Bottom View—31% Integration Time (Filtered)
图图 20. Front View—16% Integration Time (Filtered) 图图 21. Bottom View—16% Integration Time (Filtered)

Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
26 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
图图 22. Front View—8% Integration Time (Filtered) 图图 23. Bottom View—8% Integration Time (Filtered)
When comparing 图 11 through 图 16 with 图 18 through 图 23, the filters visibly help clean the picture.
In 图 24 through 图 31, the blue curve is with 31% of the integration time, the red curve with 16%, and theyellow curve with 8%.
As shown in 表 6, the filtering does not impact the mean value in a critical way; however, it improves thestandard deviation greatly, proving that the filtering is effective without injecting a significant offset.
表表 6. Phase and Distance Measurement With Filters
PIXEL /INTEGRATION TIME (%) X Y MEAN PHASE MEAN DISTANCE
(m)STANDARDDEVIATION
DISTANCESTANDARD
DEVIATION (cm)Chair 1 / 31 125 80 312.768 0.763 1.750 0.427Chair 1 / 31 (filtered) 125 80 311.603 0.760 0.328 0.080Chair 1 / 16 125 80 307.188 0.749 2.106 0.514Chair 1 / 16 (filtered) 125 80 306.278 0.747 0.471 0.115Chair 1 / 8 125 80 315.129 0.769 3.552 0.867Chair 1 / 8 (filtered) 125 80 314.467 0.767 0.978 0.239Chair 2 / 31 175 100 1266.600 3.090 8.114 1.980Chair 2 / 31 (filtered) 175 100 1271.100 3.101 1.633 0.398Chair 2 / 16 175 100 1261.500 3.078 12.357 3.015Chair 2 / 16 (filtered) 175 100 1265.800 3.088 2.115 0.516Chair 2 / 8 175 100 1269.500 3.097 23.832 5.814Chair 2 / 8 (filtered) 175 100 1270.700 3.100 3.776 0.921Wall / 31 245 60 1695.300 4.136 14.928 3.642Wall / 31 (filtered) 245 60 1694.100 4.133 2.888 0.705Wall / 16 245 60 1688.200 4.119 29.728 7.253Wall / 16 (filtered) 245 60 1685.900 4.113 5.920 1.444Wall / 8 245 60 1681.500 4.102 188.755 46.051Wall / 8 (filtered) 245 60 1688.300 4.119 14.307 3.491Floor / 31 250 150 544.597 1.329 458.889 111.956Floor / 31 (filtered) 250 150 508.486 1.241 94.390 23.028Floor / 16 250 150 799.940 1.952 635.612 155.071Floor / 16 (filtered) 250 150 617.055 1.505 131.725 32.137Floor / 8 250 150 946.315 2.309 727.578 177.508

www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
27ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
表表 6. Phase and Distance Measurement With Filters (continued)
PIXEL /INTEGRATION TIME (%) X Y MEAN PHASE MEAN DISTANCE
(m)STANDARDDEVIATION
DISTANCESTANDARD
DEVIATION (cm)Floor / 8 (filtered) 250 150 877.194 2.140 142.808 34.841
Note that the mean distance is expressed in meters, while the distance standard deviation is expressed incentimeters.
图图 24. Chair 1 Pixel 图图 25. Chair 1 Pixel (Filtered)
图图 26. Chair 2 Pixel 图图 27. Chair 2 Pixel (Filtered)

Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
28 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
图图 28. Wall Pixel 图图 29. Wall Pixel (Filtered)
图图 30. Floor Pixel 图图 31. Floor Pixel (Filtered)

4.2 m
3.6 m
4.682 m
0.519 m2.834 m
Chair 1
Chair 2
OPT8241-CDK-EVM
4.2 m
3.6 m
4.414 m
0.295 m2.578 m
Chair 1
Chair 2
OPT8241-CDK-EVM
www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
29ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
3.2.4 Saturation
As seen in 节 2.4.5.2 and 节 2.4.5.3, when saturation occurs, changing the integration time can help to getrid of saturation and have a valid distance measurement without having to discard the pixels originallysaturated.
To test this, the holder is moved closer to the targets until there is saturation with 31% of integration time,as shown in 图 40. Then the OPT8241-CDK-EVM is moved further closer to the target, until there issaturation with 16% of integration time, as shown in 图 41.
The figures on the right side are the front view, while the one on the left side are the same figure with a90° rotation down to visualize the value of the phase measured.
From 图 34 to 图 39, the frame displayed is the 25th frame after filtering.
图图 32. Room and Targets Distance (Position 2) 图图 33. Room and Targets Distance (Position 3)
图图 34. Position 2—31% Integration Time 图图 35. Position 2—16% Integration Time

Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
30 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
图图 36. Position 2—8% Integration Time 图图 37. Position 3—31% Integration Time
图图 38. Position 3—16% Integration Time 图图 39. Position 3—8% Integration Time
As expected, reducing the integration time helps to get rid of saturation, proving that using HDR can helpprovide accurate measurement at close and long ranges.

WallCh1
Floor
Ch2
WallCh1
Floor
Ch2
www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
31ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
图 40 and 图 41 show the pixels at different places on the pictures, and 表 7 and 表 8 list their meanvalues as well as their standard deviation.
图图 40. Location of Pixels (Position 2) 图图 41. Location of Pixels (Position 3)
表表 7. Phase and Distance Measurement (Position 2)
PIXEL /INTEGRATION TIME (%) X Y MEAN PHASE MEAN
DISTANCE (m)STANDARDDEVIATION
DISTANCESTANDARD
DEVIATION (cm)Chair 1 / 31 filtered 115 52 226.623 0.553 0.274 0.067Chair 1 / 16 filtered 115 52 228.245 0.557 0.255 0.062Chair 1 / 8 filtered 115 52 222.442 0.543 0.491 0.120Chair 2 / 31 filtered 182 97 1191.600 2.907 1.274 0.311Chair 2 / 16 filtered 182 97 1193.100 2.911 2.022 0.493Chair 2 / 8 filtered 182 97 1184.800 2.891 4.542 1.108Wall 31 / filtered 245 60 1625.400 3.966 2.385 0.582Wall 16 / filtered 245 60 1624.700 3.964 4.583 1.118Wall 8 / filtered 245 60 1614.900 3.940 11.522 2.811Floor 31 / filtered 250 150 341.475 0.833 9.887 2.412Floor 16 / filtered 250 150 380.221 0.928 42.306 10.321Floor 8 / filtered 250 150 525.165 1.281 103.556 25.265
Note that the mean distance is expressed in meters, while the distance standard deviation is expressed incentimeters.

Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
32 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
表表 8. Phase and Distance Measurement (Position 3)
PIXEL /INTEGRATION TIME (%) X Y MEAN PHASE MEAN
DISTANCE (m)STANDARDDEVIATION
DISTANCESTANDARD
DEVIATION (cm)Chair 1 / 31 filtered 55 38 3908 9.534 55.7705 13.606Chair 1 / 16 filtered 55 38 118.468 0.289 0.2889 0.07Chair 1 / 8 filtered 55 38 114.379 0.279 0.291 0.071Chair 2 / 31 filtered 189 96 1086.7 2.651 1.676 0.409Chair 2 / 16 filtered 189 96 1084.5 2.646 2.497 0.609Chair 2 / 8 filtered 189 96 1079 2.632 3.798 0.927Wall 31 / filtered 245 60 1536.9 3.75 1.857 0.453Wall 16 / filtered 245 60 1532.8 3.74 3.694 0.901Wall 8 / filtered 245 60 1527.1 3.726 8.158 1.99Floor 31 / filtered 250 150 641.161 1.564 129.042 31.483Floor 16 / filtered 250 150 719.895 1.756 109.835 26.797Floor 8 / filtered 250 150 740.079 1.806 133.079 32.468
Note that the mean distance is expressed in meters, while the distance standard deviation is expressed incentimeters.

www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
33ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
3.2.5 External IR Source
This section focuses on the influence an external source of IR light has on the performance. An externalsource of IR could be the Sun (direct or through windows) or other equipments.
Two different cases are studied here:1. The external source is illuminating the scene.2. The external source is illuminating directly the OPT8241-CDK-EVM.
From 图 44 to 图 46, the frame displayed is the 25th frame.
All the tests results displayed in this section are done with 31% of integration time.
图图 42. IR Source Illuminating the Scene Setup 图图 43. IR Source Facing the OPT8241-CDK-EVM Setup

Hardware, Software, Testing Requirements, and Test Results www.ti.com.cn
34 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
图图 44. No IR Source 图图 45. IR Source Illuminating the Scene
图图 46. IR Source Facing the OPT8241-CDK-EVM
The pixel coordinates are the same as shown in 图 17.
Note that the mean distance is expressed in meters, while the distance standard deviation is expressed incentimeters.

www.ti.com.cn Hardware, Software, Testing Requirements, and Test Results
35ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
In 图 47 through 图 50, the blue curve is without the external source, the red curve with the externalsource illuminating the scene, and the yellow curve with the external source facing the OPT8241-CDK-EVM.
图图 47. Chair 1 Pixel 图图 48. Chair 2 Pixel
图图 49. Wall Pixel 图图 50. Floor Pixel
By comparing the phase measurement without an external source and with the external sourceilluminating the scene, there is a slight offset when measuring the two chairs. This is due to the increaseof the ambient light level, with a slight decrease in accuracy.
As shown in 节 2.4.3.1, the ambient data can be used to measure the accuracy of the phasemeasurement. By comparing the phase measurement without an external source and with the externalsource facing the OPT8241-CDK-EVM, the pixels around the IR source are saturating as expected. In thiscase, however, decreasing the integration time does not help. Discard those pixels by using the saturationflag or amplitude information. Except for those saturated pixels, there is no noticeable influence on theaccuracy of the phase measurement or on the ambient data for the rest of the pixels.

Design Files www.ti.com.cn
36 ZHCU430–January 2018
TIDUCG8 — http://www-s.ti.com/sc/techlit/TIDUCG8版权 © 2018, Texas Instruments Incorporated
高精度 320×240 Voxel 3D 飞行时间机器人视觉参考设计
4 Design Files
Download the design files from the OPT8241-CDK-EVM page.
5 Software Files
To download the software files, see the design files at TIDA-01173.
6 Related Documentation1. Texas Instruments, Introduction to the Time-of-Flight (ToF) System Design User’s Guide2. Texas Instruments, Time-of-Flight Camera—An Introduction Technical White Paper3. Texas Instruments, OPT8241 Evaluation Module User’s Guide4. Texas Instruments, OPT8241 CDK Evaluation Module Quick Start Guide5. Texas Instruments, OPT8241 3D Time-of-Flight Sensor Data Sheet6. Texas Instruments, OPT9221 Time-of-Flight Controller Data Sheet7. Texas Instruments, Filtering for 3D Time-of-Flight Sensors White Paper8. Texas Instruments, Voxel Viewer Quick Start Guide9. Texas Instruments, Achieving increased functionality and efficiency in vacuum robots Marketing White
Paper
6.1 商商标标
E2E, Sitara are trademarks of Texas Instruments.Arm, Cortex are registered trademarks of Arm Limited (or its subsidiaries).Android is a trademark of Google LLC.Windows is a registered trademark of Microsoft Corporation.DepthSense is a trademark of SoftKinetic.MATLAB is a registered trademark of The MathWorks, Inc.All other trademarks are the property of their respective owners.

有有关关 TI 设设计计信信息息和和资资源源的的重重要要通通知知
德州仪器 (TI) 公司提供的技术、应用或其他设计建议、服务或信息,包括但不限于与评估模块有关的参考设计和材料(总称“TI 资源”),旨在帮助设计人员开发整合了 TI 产品的 应用; 如果您(个人,或如果是代表贵公司,则为贵公司)以任何方式下载、访问或使用了任何特定的TI 资源,即表示贵方同意仅为该等目标,按照本通知的条款进行使用。TI 所提供的 TI 资源,并未扩大或以其他方式修改 TI 对 TI 产品的公开适用的质保及质保免责声明;也未导致 TI 承担任何额外的义务或责任。TI 有权对其 TI 资源进行纠正、增强、改进和其他修改。您理解并同意,在设计应用时应自行实施独立的分析、评价和 判断, 且应全权负责并确保 应用的安全性, 以及您的 应用 (包括应用中使用的所有 TI 产品))应符合所有适用的法律法规及其他相关要求。你就您的 应用声明,您具备制订和实施下列保障措施所需的一切必要专业知识,能够 (1) 预见故障的危险后果,(2) 监视故障及其后果,以及 (3) 降低可能导致危险的故障几率并采取适当措施。您同意,在使用或分发包含 TI 产品的任何 应用前, 您将彻底测试该等 应用 和该等应用所用 TI 产品的 功能而设计。除特定 TI 资源的公开文档中明确列出的测试外,TI 未进行任何其他测试。您只有在为开发包含该等 TI 资源所列 TI 产品的 应用时, 才被授权使用、复制和修改任何相关单项 TI 资源。但并未依据禁止反言原则或其他法理授予您任何TI知识产权的任何其他明示或默示的许可,也未授予您 TI 或第三方的任何技术或知识产权的许可,该等产权包括但不限于任何专利权、版权、屏蔽作品权或与使用TI产品或服务的任何整合、机器制作、流程相关的其他知识产权。涉及或参考了第三方产品或服务的信息不构成使用此类产品或服务的许可或与其相关的保证或认可。使用 TI 资源可能需要您向第三方获得对该等第三方专利或其他知识产权的许可。TI 资源系“按原样”提供。TI 兹免除对 TI 资源及其使用作出所有其他明确或默认的保证或陈述,包括但不限于对准确性或完整性、产权保证、无屡发故障保证,以及适销性、适合特定用途和不侵犯任何第三方知识产权的任何默认保证。TI 不负责任何申索,包括但不限于因组合产品所致或与之有关的申索,也不为您辩护或赔偿,即使该等产品组合已列于 TI 资源或其他地方。对因 TI 资源或其使用引起或与之有关的任何实际的、直接的、特殊的、附带的、间接的、惩罚性的、偶发的、从属或惩戒性损害赔偿,不管TI 是否获悉可能会产生上述损害赔偿,TI 概不负责。您同意向 TI 及其代表全额赔偿因您不遵守本通知条款和条件而引起的任何损害、费用、损失和/或责任。本通知适用于 TI 资源。另有其他条款适用于某些类型的材料、TI 产品和服务的使用和采购。这些条款包括但不限于适用于 TI 的半导体产品(http://www.ti.com/sc/docs/stdterms.htm)、评估模块和样品 (http://www.ti.com/sc/docs/sampterms.htm) 的标准条款。IMPORTANT NOTICE
邮寄地址:上海市浦东新区世纪大道 1568 号中建大厦 32 楼,邮政编码:200122Copyright © 2018 德州仪器半导体技术(上海)有限公司