Embed Size (px)
Citation preview
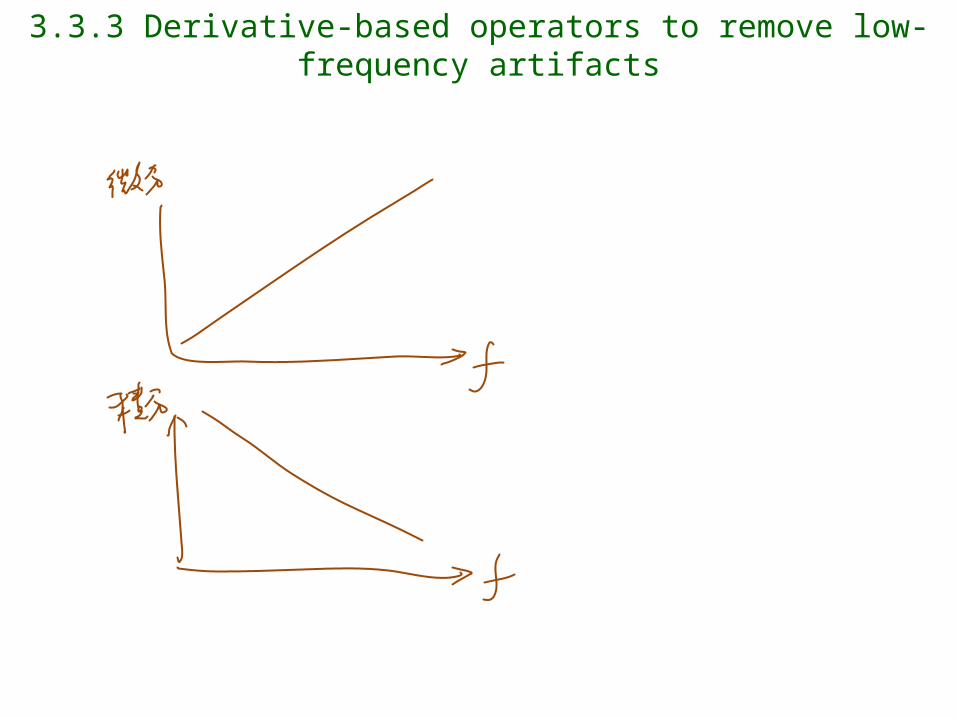
3.3.3 Derivative-based operators to remove low-frequency artifacts
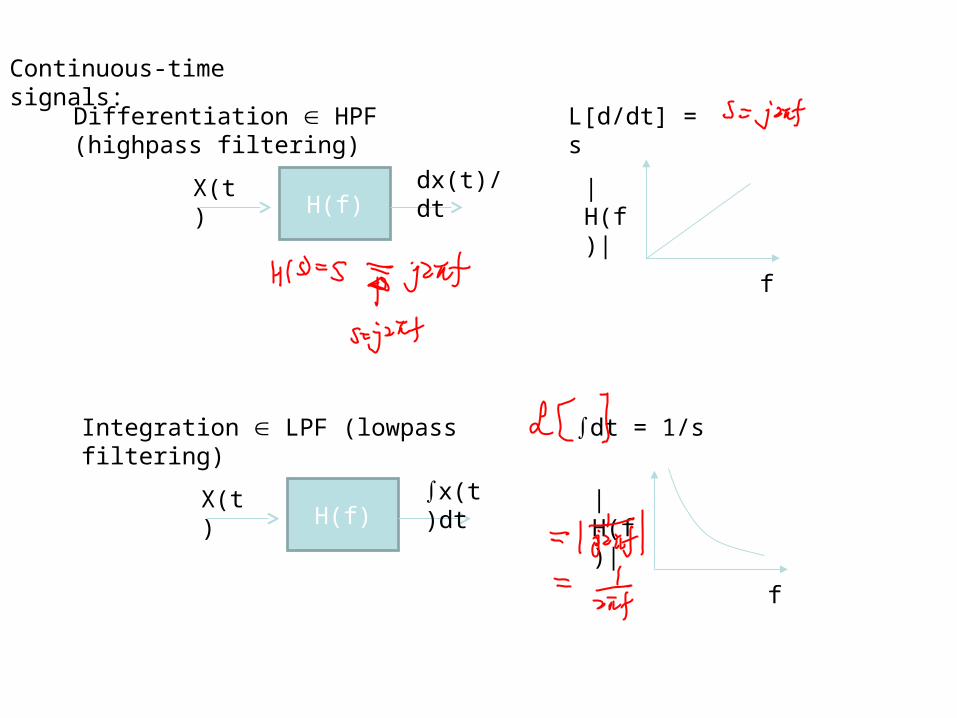
H(f)X(t) dx(t)/dt
f
|H(f)|
Differentiation HPF (highpass filtering) L[d/dt] = s
Continuous-time signals:
H(f)X(t) x(t)dt
Integration LPF (lowpass filtering) dt = 1/s
f
|H(f)|
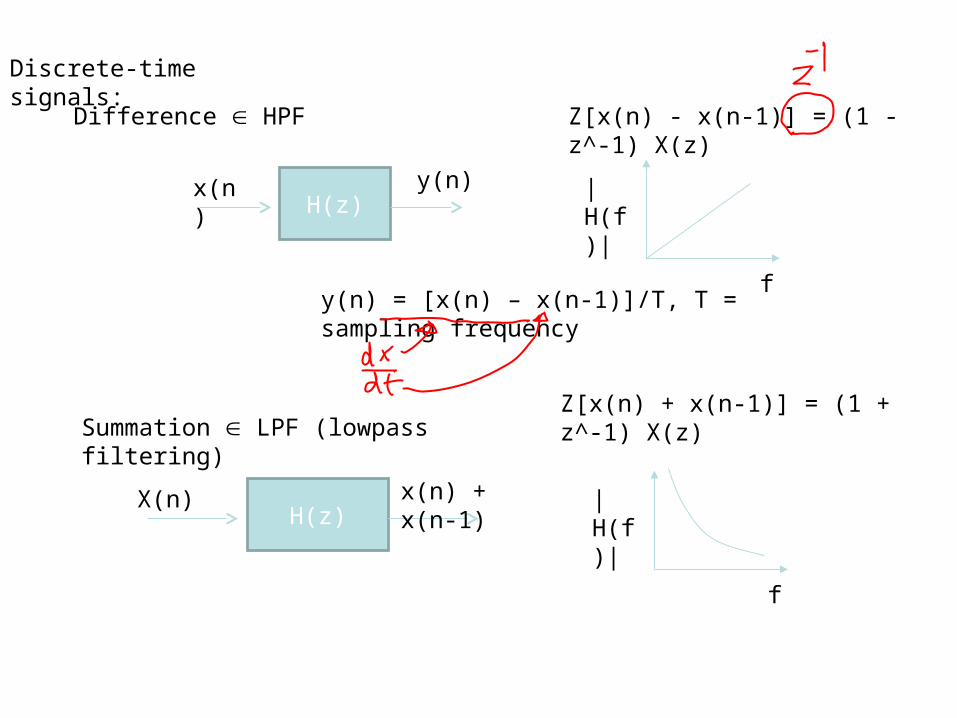
H(z)x(n) y(n)
f
|H(f)|
Difference HPF Z[x(n) - x(n-1)] = (1 - z^-1) X(z)
Discrete-time signals:
H(z)X(n) x(n) + x(n-1)
Summation LPF (lowpass filtering)
f
|H(f)|
y(n) = [x(n) – x(n-1)]/T, T = sampling frequency
Z[x(n) + x(n-1)] = (1 + z^-1) X(z)
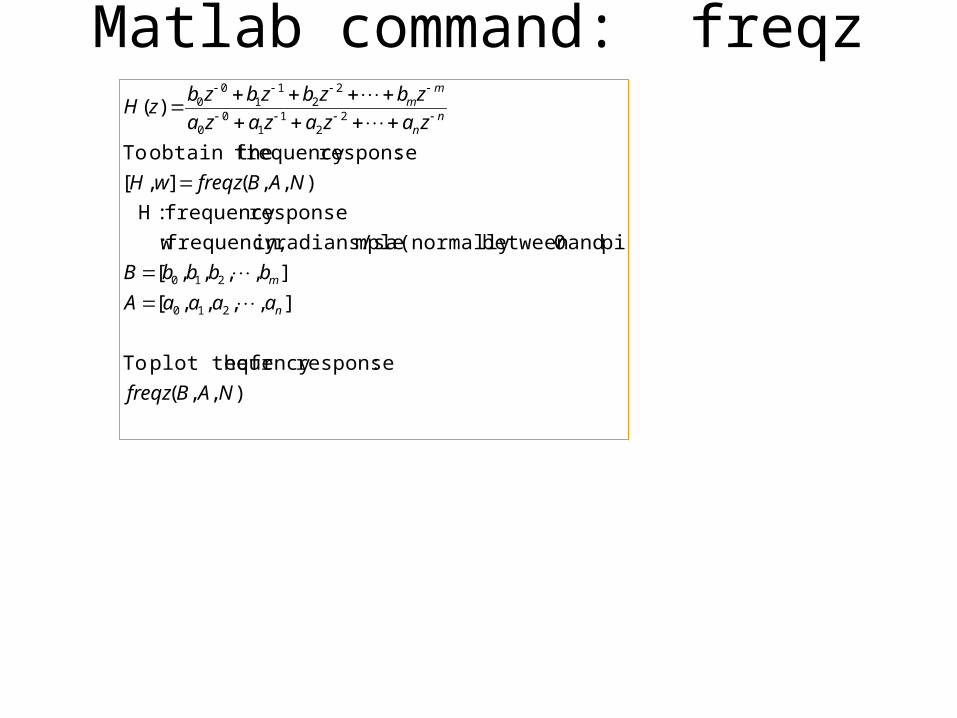
Matlab command: freqz
),,(
:responseequency plot thefr To
],,,,[
],,,,[
pi) and 0between (normally mpleradians/sain frequency, : w
responsefrequency :H
),,(],[
:responsefrequency obtain the To
)(
210
210
22
11
00
22
11
00
NABfreqz
aaaaA
bbbbB
NABfreqzwH
zazazaza
zbzbzbzbzH
n
m
nn
mm
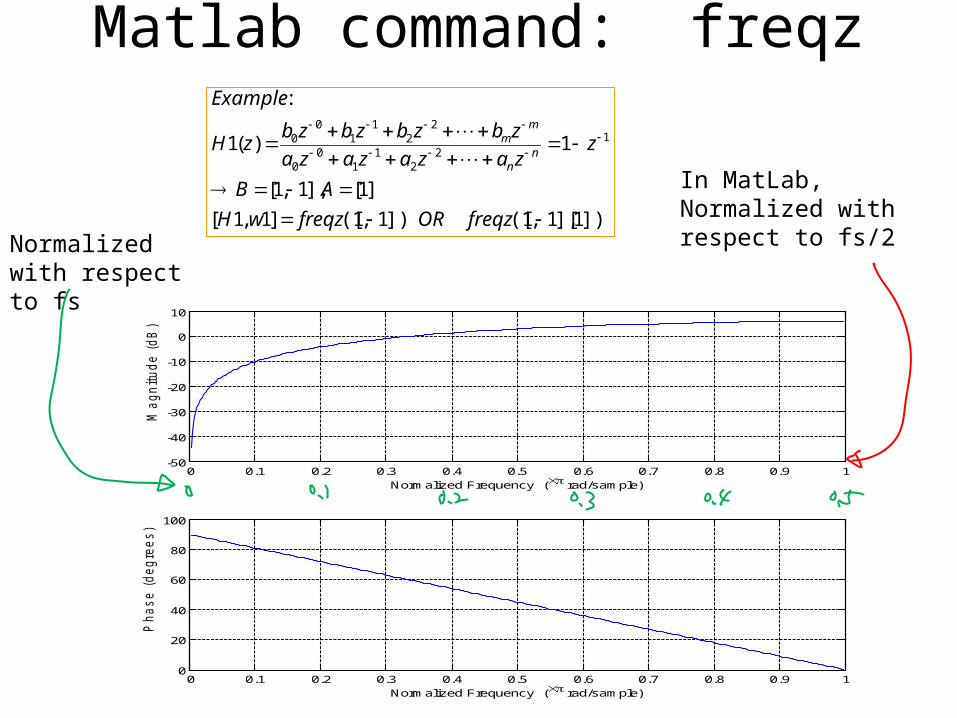
Matlab command: freqz
])1[],1,1([])1,1([]1,1[
]1[],1,1[
1)(1
:
12
21
10
0
22
11
00
freqzORfreqzwH
AB
zzazazaza
zbzbzbzbzH
Example
nn
mm
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
20
40
60
80
100
Normalized Frequency ( rad/sample)
Phase (
degre
es)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-50
-40
-30
-20
-10
0
10
Normalized Frequency ( rad/sample)
Magnitude (
dB
)
In MatLab,Normalized with respect to fs/2Normalized with
respect to fs
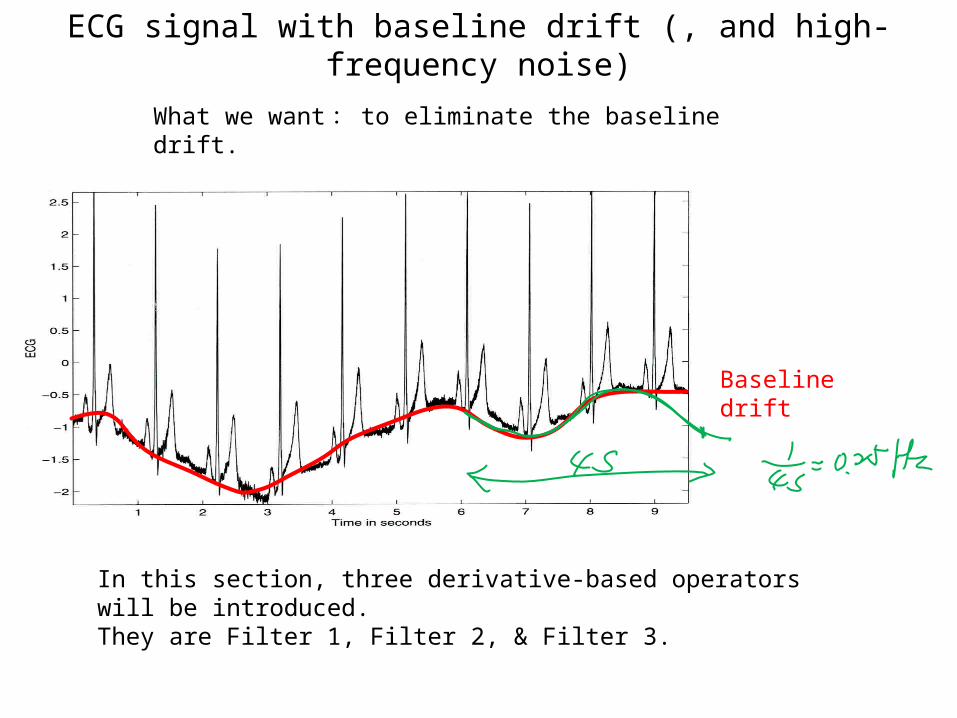
ECG signal with baseline drift (, and high-frequency noise)
Baseline drift
What we want : to eliminate the baseline drift.
In this section, three derivative-based operators will be introduced.They are Filter 1, Filter 2, & Filter 3.
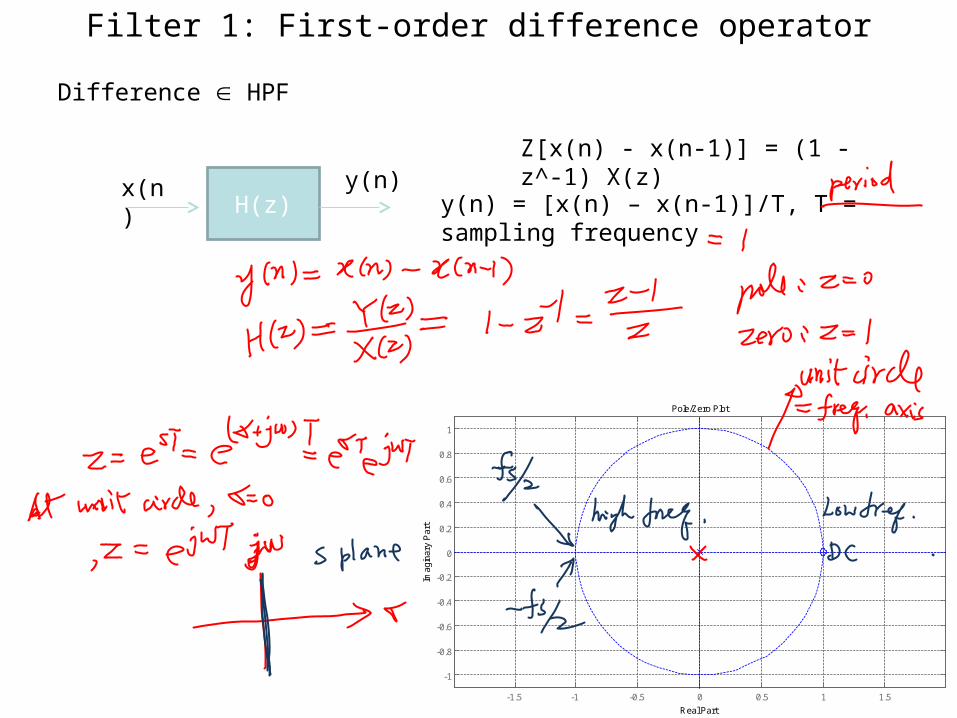
Filter 1: First-order difference operator
H(z)x(n) y(n)
Difference HPF
Z[x(n) - x(n-1)] = (1 - z^-1) X(z)
y(n) = [x(n) – x(n-1)]/T, T = sampling frequency
-1.5 -1 -0.5 0 0.5 1 1.5
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imag
inar
y P
art
Pole/Zero Plot
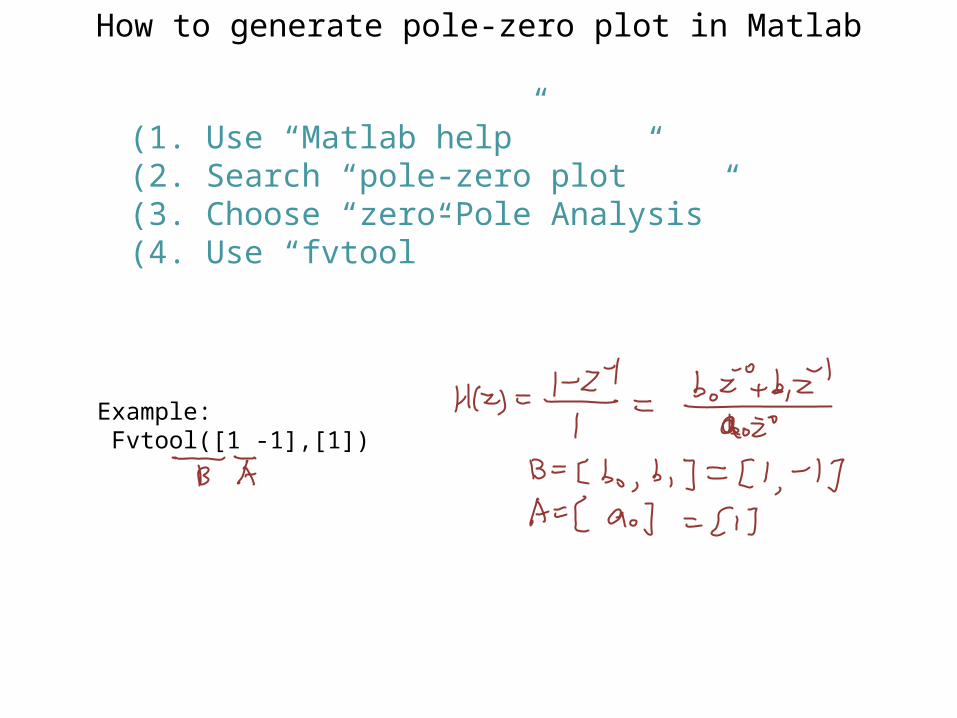
How to generate pole-zero plot in Matlab
(1. Use “Matlab help”(2. Search “pole-zero plot”(3. Choose “zero-Pole Analysis”(4. Use “fvtool”
Example: Fvtool([1 -1],[1])
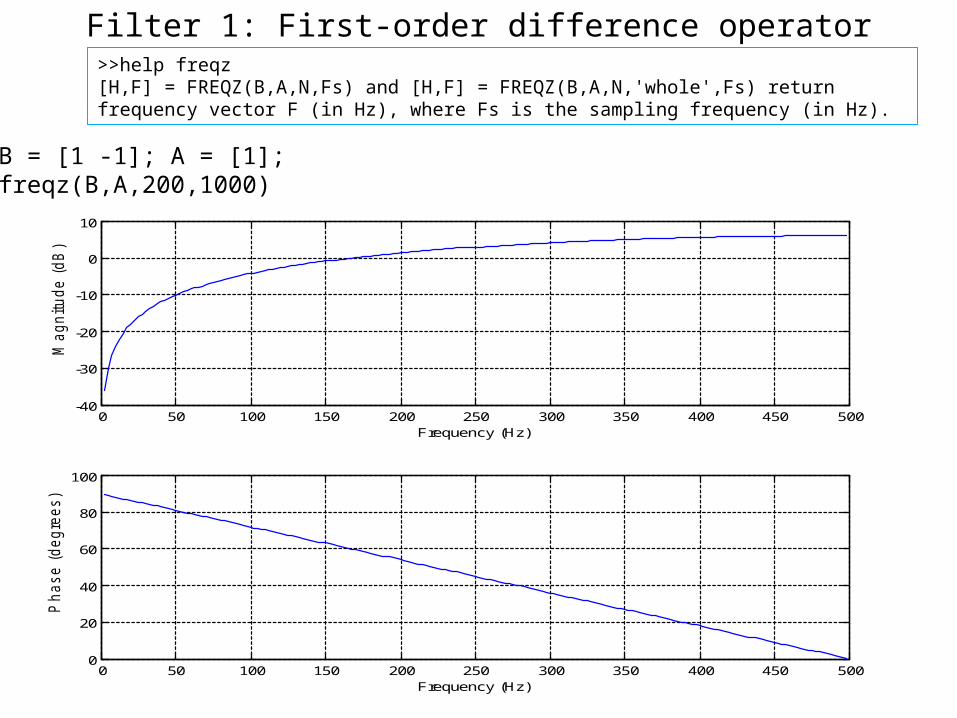
Filter 1: First-order difference operator
B = [1 -1]; A = [1];freqz(B,A,200,1000)
0 50 100 150 200 250 300 350 400 450 5000
20
40
60
80
100
Frequency (Hz)
Phase (
degre
es)
0 50 100 150 200 250 300 350 400 450 500-40
-30
-20
-10
0
10
Frequency (Hz)
Magnitude (
dB
)>>help freqz[H,F] = FREQZ(B,A,N,Fs) and [H,F] = FREQZ(B,A,N,'whole',Fs) return frequency vector F (in Hz), where Fs is the sampling frequency (in Hz).
0 100 200 300 400 500 600 700-1.5
-1
-0.5
0
0.5
1
1.5
2
2.5
3
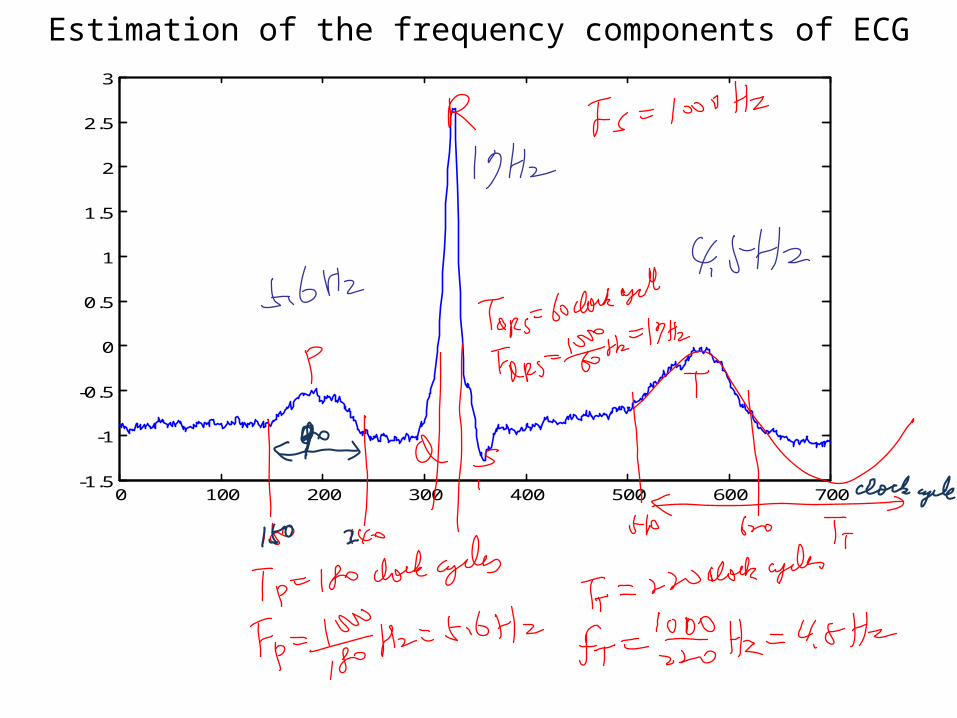
Estimation of the frequency components of ECG
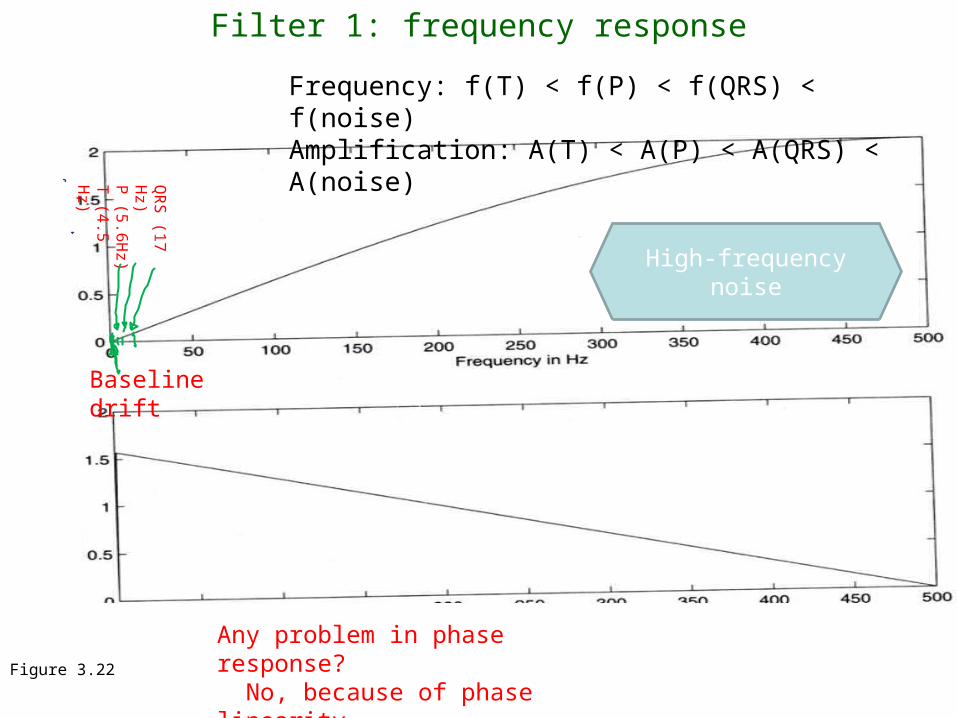
Filter 1: frequency response
Figure 3.22
Frequency: f(T) < f(P) < f(QRS) < f(noise)Amplification: A(T) < A(P) < A(QRS) < A(noise)
High-frequency noise
Any problem in phase response? No, because of phase linearity
QR
S (1
7 H
z)P
(5.6
Hz)
T (4
.5 H
z)
Baseline drift
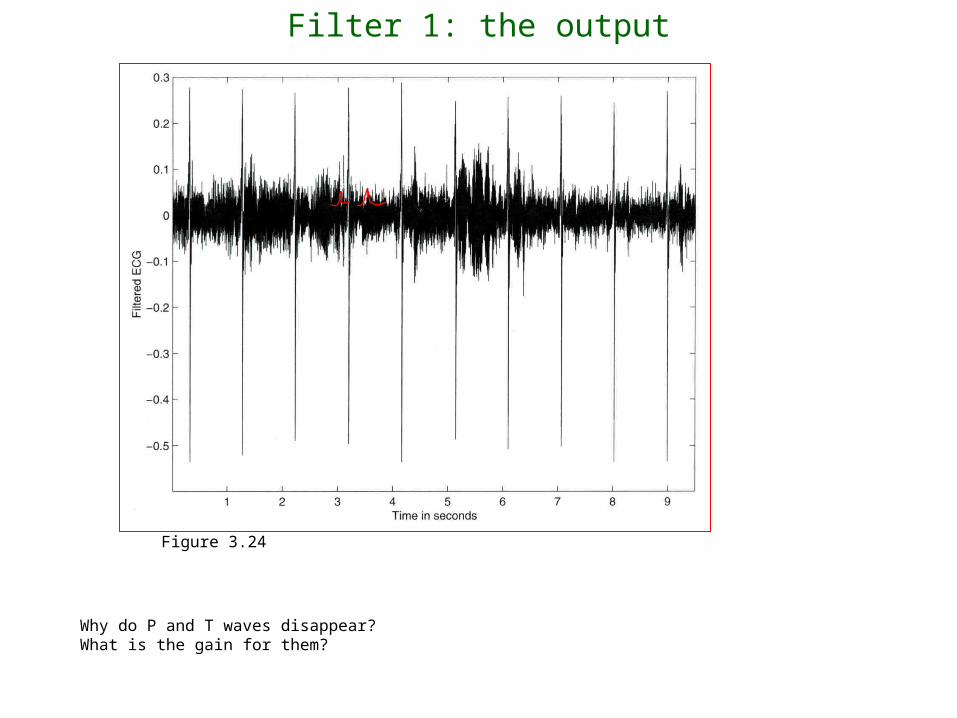
Filter 1: the output
Figure 3.24
Why do P and T waves disappear?What is the gain for them?

270 280 290 300 310 320 330 340 350 360 370
-1
0
1
2
3x
270 280 290 300 310 320 330 340 350 360 370-1
-0.5
0
0.5
y
n
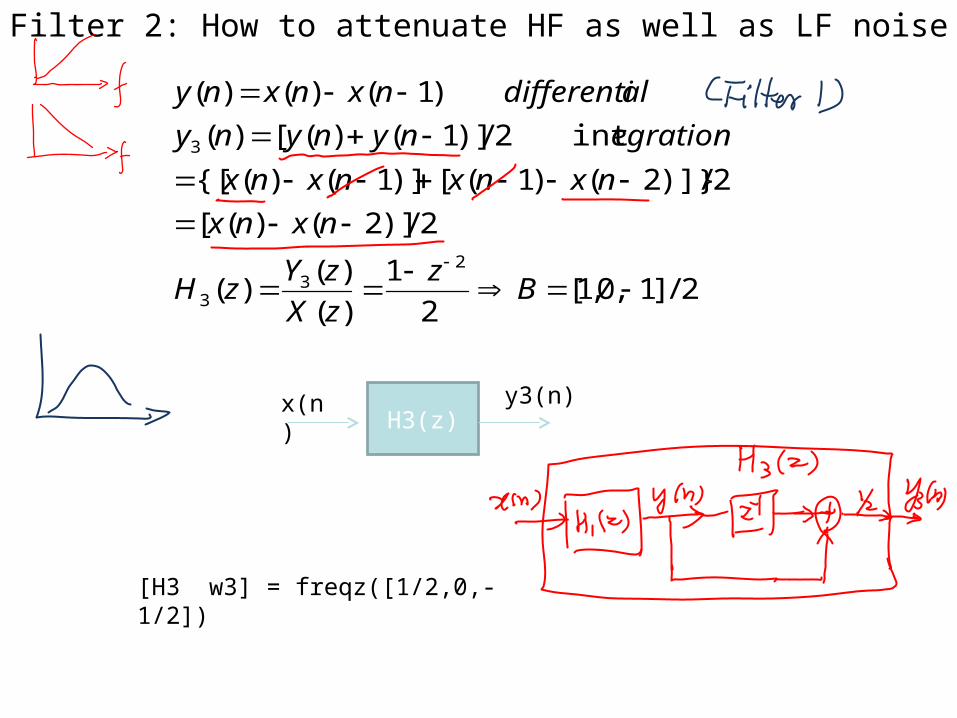
Filter 2: How to attenuate HF as well as LF noise
2/]1,0,1[2
1
)(
)()(
2/)]2()([
2/)]}2()1([)]1()({[
int2/)]1()([)(
)1()()(
23
3
3
Bz
zX
zYzH
nxnx
nxnxnxnx
egrationnynyny
aldifferentinxnxny
H3(z)x(n) y3(n)
[H3 w3] = freqz([1/2,0,-1/2])

Filter 2 --- frequency response
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-100
-50
0
50
100
Normalized Frequency ( rad/sample)
Pha
se (
degr
ees)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-50
-40
-30
-20
-10
0
Normalized Frequency ( rad/sample)
Mag
nitu
de (
dB)
[H3 w3] = freqz([1/2,0,-1/2])
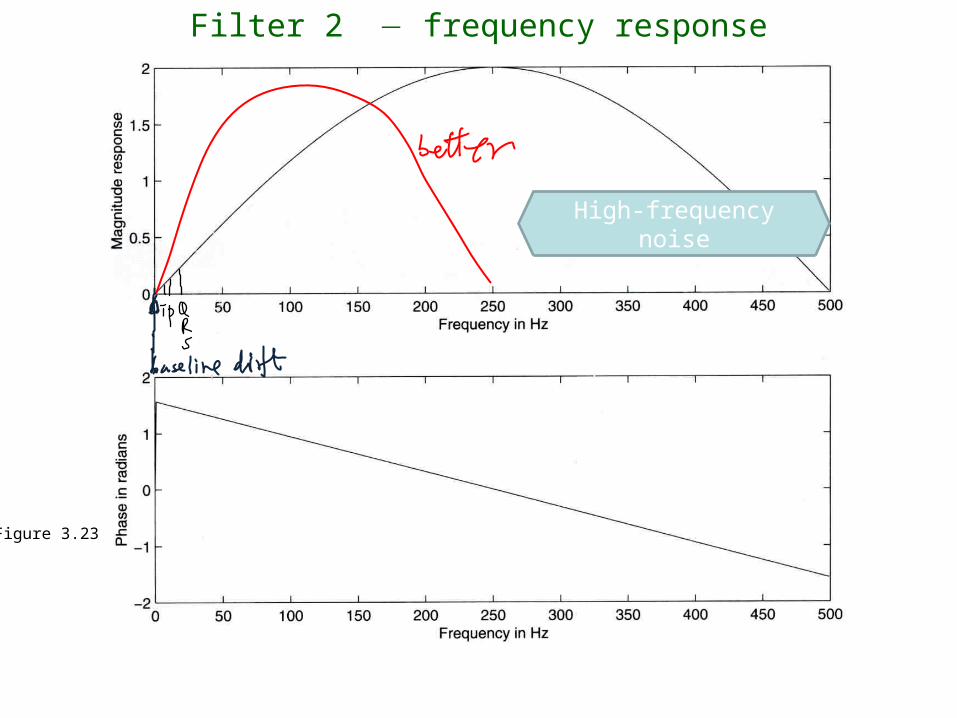
Filter 2 frequency response
Figure 3.23
High-frequency noise
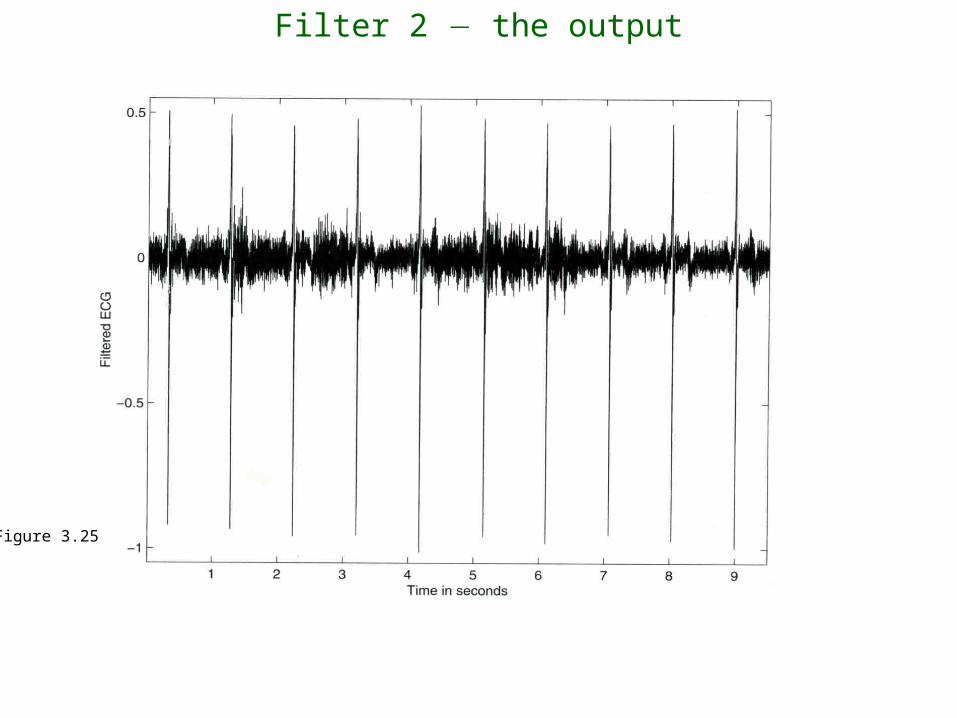
Filter 2 the output
Figure 3.25
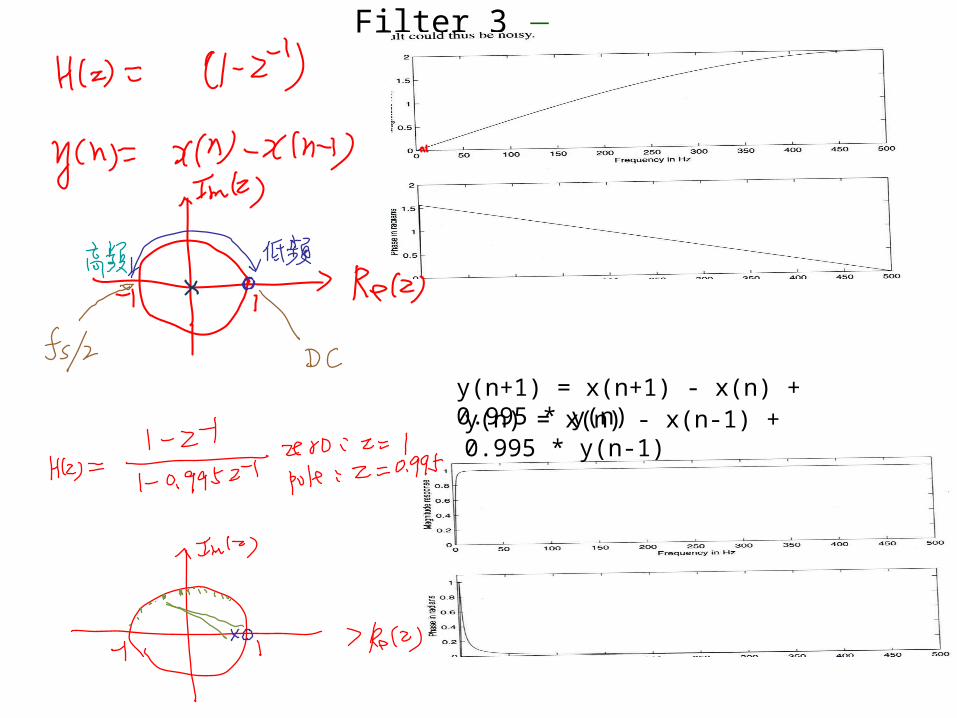
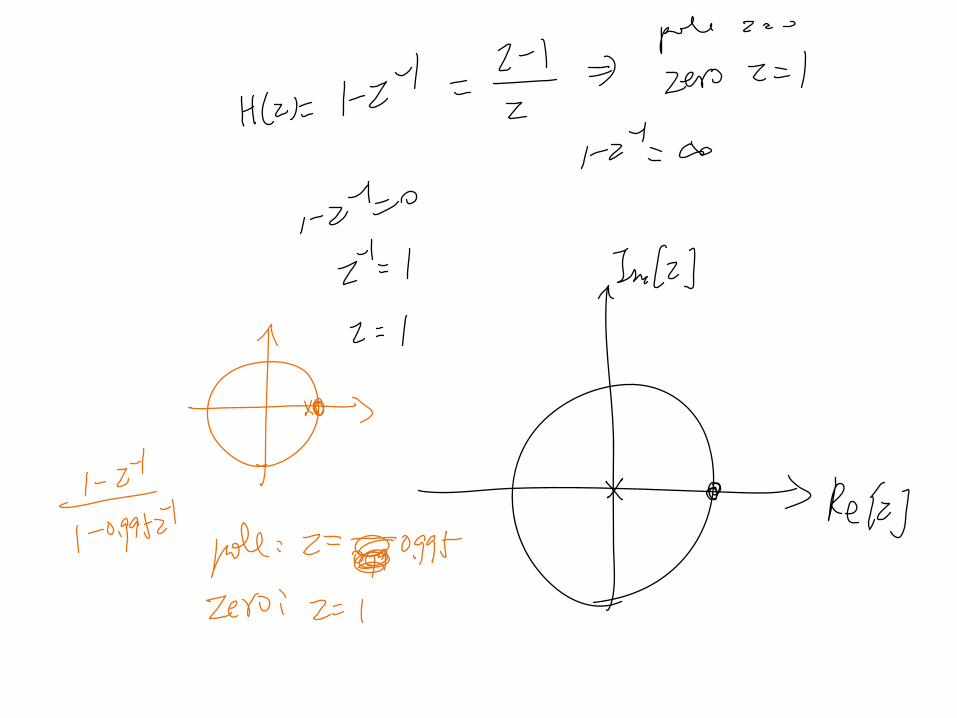
Filter 3
y(n+1) = x(n+1) - x(n) + 0.995 * y(n)y(n) = x(n) - x(n-1) + 0.995 * y(n-1)
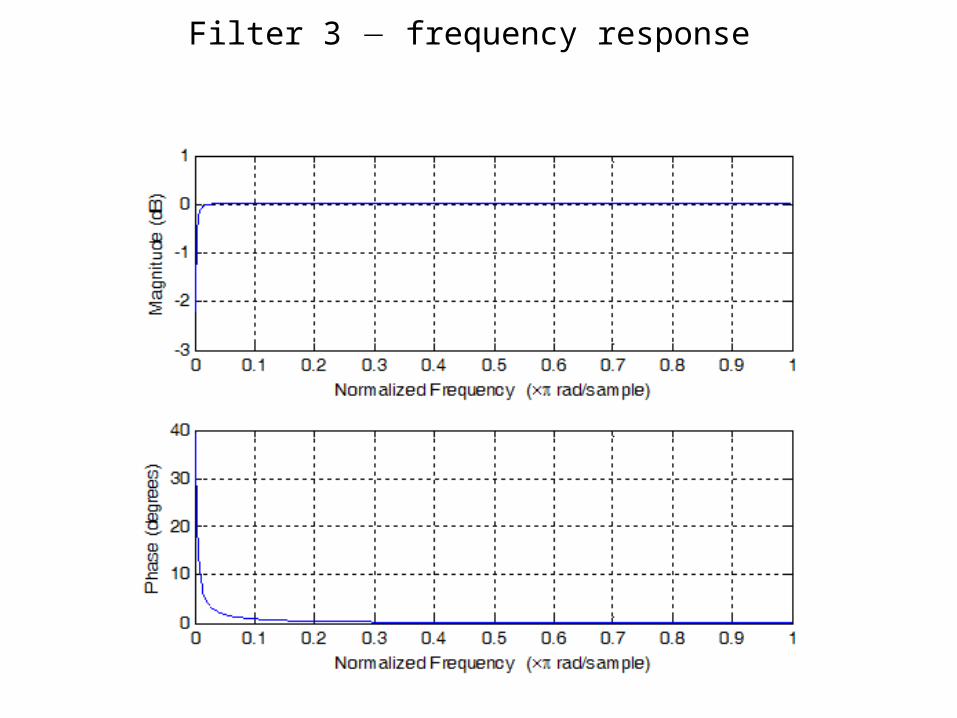
Filter 3 frequency response
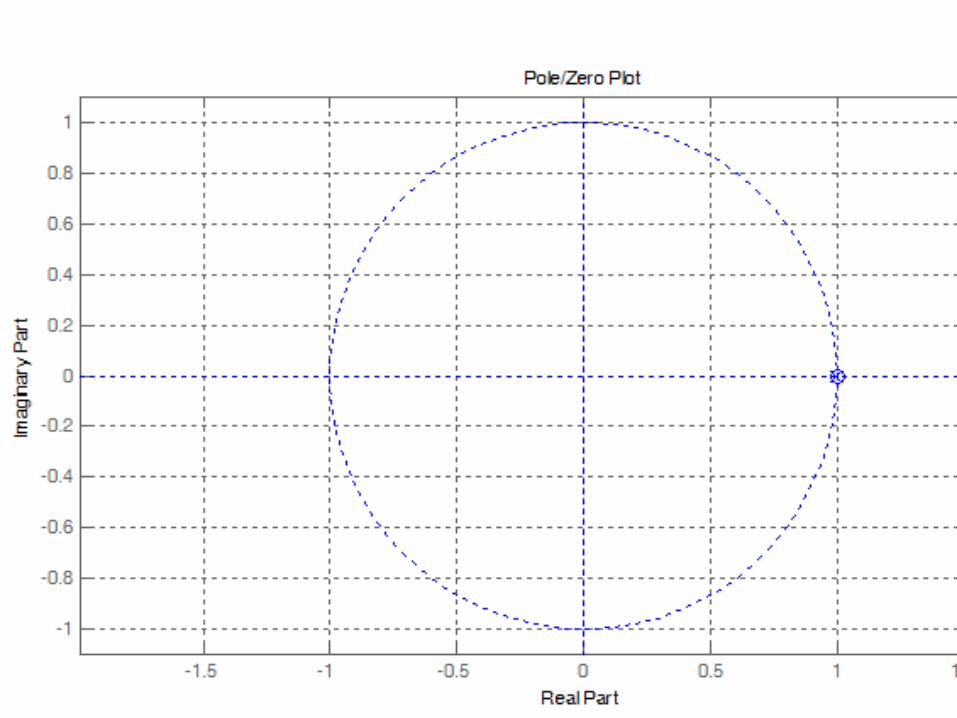
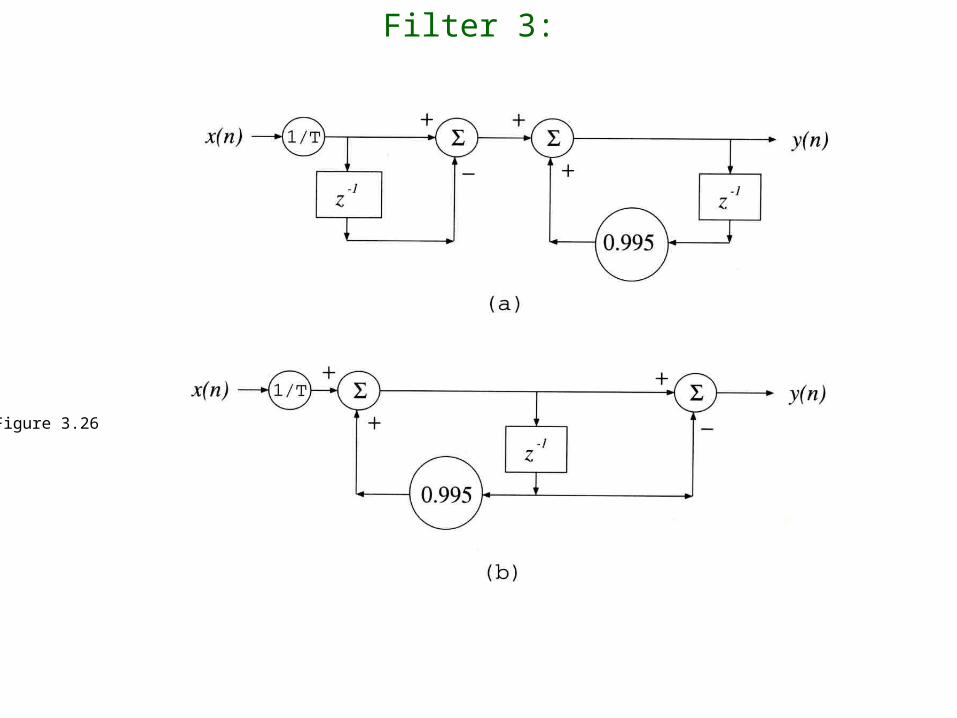
Filter 3:
Figure 3.26
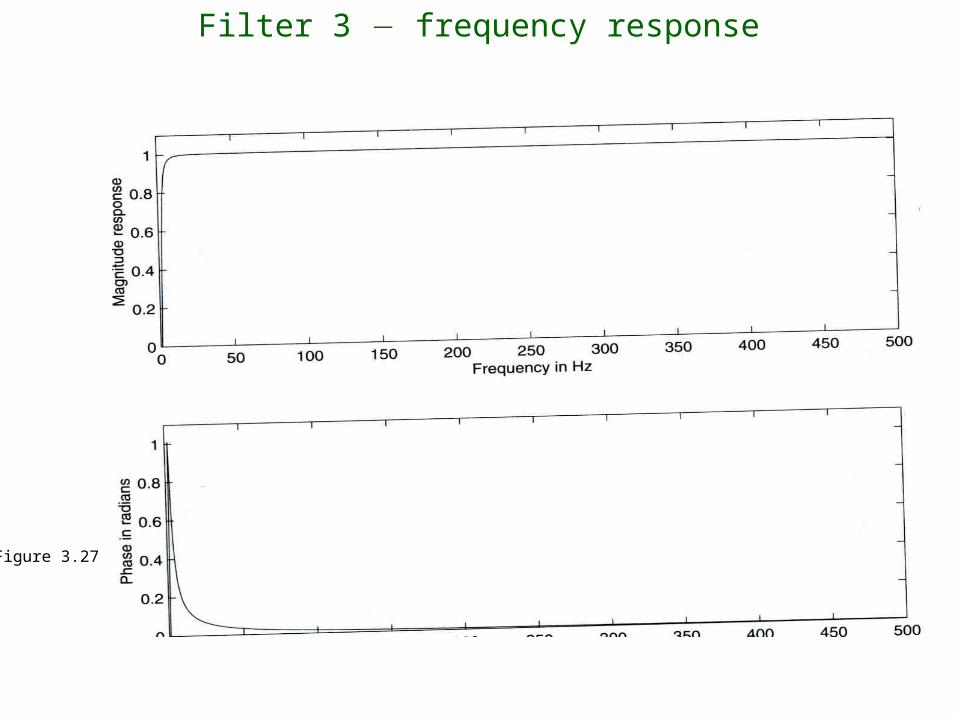
Filter 3 frequency response
Figure 3.27
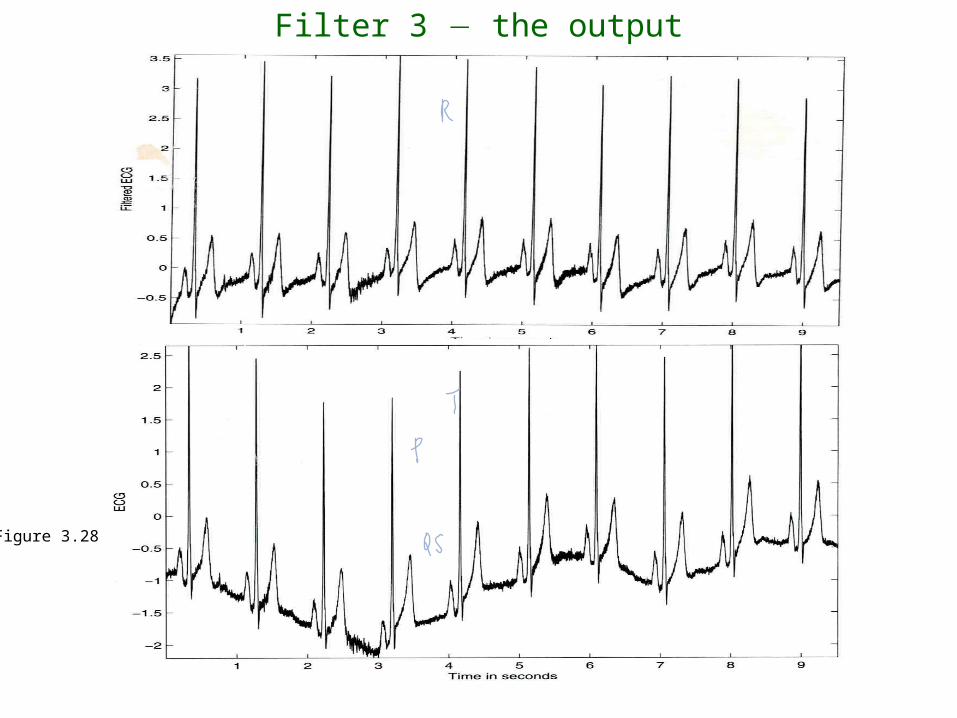
Filter 3 the output
Figure 3.28





























