Embed Size (px)
Citation preview
3D RTI
Team Lead: Ben LauRyan Drury, Rene Gomez, Travis Carlson
MotivationRTI allows users to change the lighting in a scene
Light interacts with the surface features of an objectThe direction of light affects shadows and shades of colorBy varying the direction of light, users can better understand the geometry of the object

ProjectGoal:
Take RTI further by allowing user to better understand geometry of an object by using stereoscopic methods to see depth
ObjectivesCapture stereo RTI datasetsDevelop viewers to visualize stereo RTI data
Fullscreen 3D TV viewerAnaglyph viewerPoint cloud visualization
Overview of 3D TVsMost current 3D TVs rely on “active shutter” glassesTV alternates between showing left and right views while synchronized glasses block one eye at a time to prevent it from seeing the wrong viewCreates a 3D effect if FPS is high enough
Overview of 3D TVsTwo popular encodings of stereoscopic image pairs:
Side-by-sideFrame-sequential
Fullscreen 3D TV ViewerCan view stereo RTI datasets on a 3D TV naturally using side-by-side encodingWe also wrote a program to generate frame-sequential videos
Fullscreen 3D TV ViewerDemo of side-by-side mode
Anaglyph ViewerAnaglyphic 3D is passive, in contrast to the “active” 3D technology just discussedAnaglyphs rely on complementary color filters to pass the correct view to the correct eyeMost widely available method of stereoscopy
Classic red-cyan glasses

True Anaglyph
Formula: + Little Ghosting - Dark Image
- No Color Reproduction

Color Anaglyph
Formula: + Partial Color Reproduction
- Retinal Rivalry
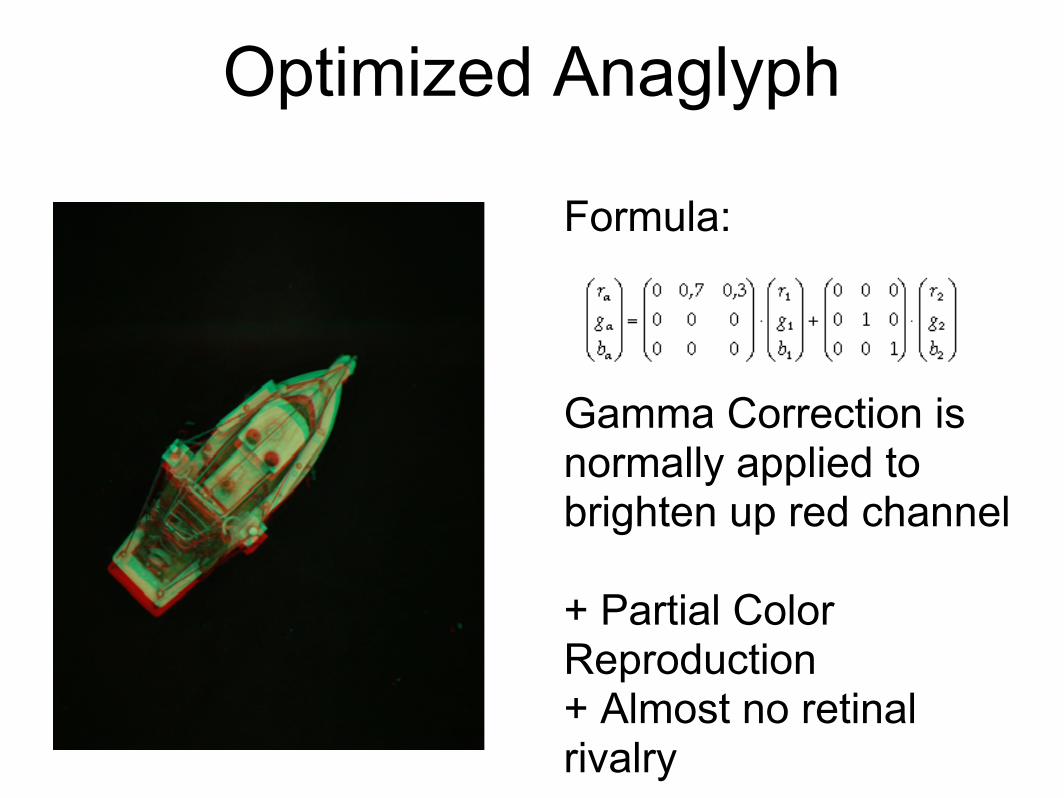
Optimized Anaglyph
Formula:
Gamma Correction is normally applied to brighten up red channel
+ Partial Color Reproduction+ Almost no retinal rivalry
Point Cloud Viewer PipelineDevelopment of point cloud viewer required some preparatory work:
Camera calibrationImage rectificationDisparity map calculation
Camera CalibrationStereo camera is conceptually 2 regular cameras put together
Hence, calibrate both cameras individually and together
Need to calculate both intrinsic and extrinsic parameters
Intrinsic: focal length, skew, etc of each individual camera
Extrinsic: relative positions of 2 cameras, expressed as a pair of translation and rotation matrices
Image RectificationCamera calibration lets us rectify the images more accuratelyImage rectification is the process of projecting 2 images to the same plane
This makes all the epipolar lines parallelSimplifies the task of finding corresponding points in the scene that have been projected to different pixels
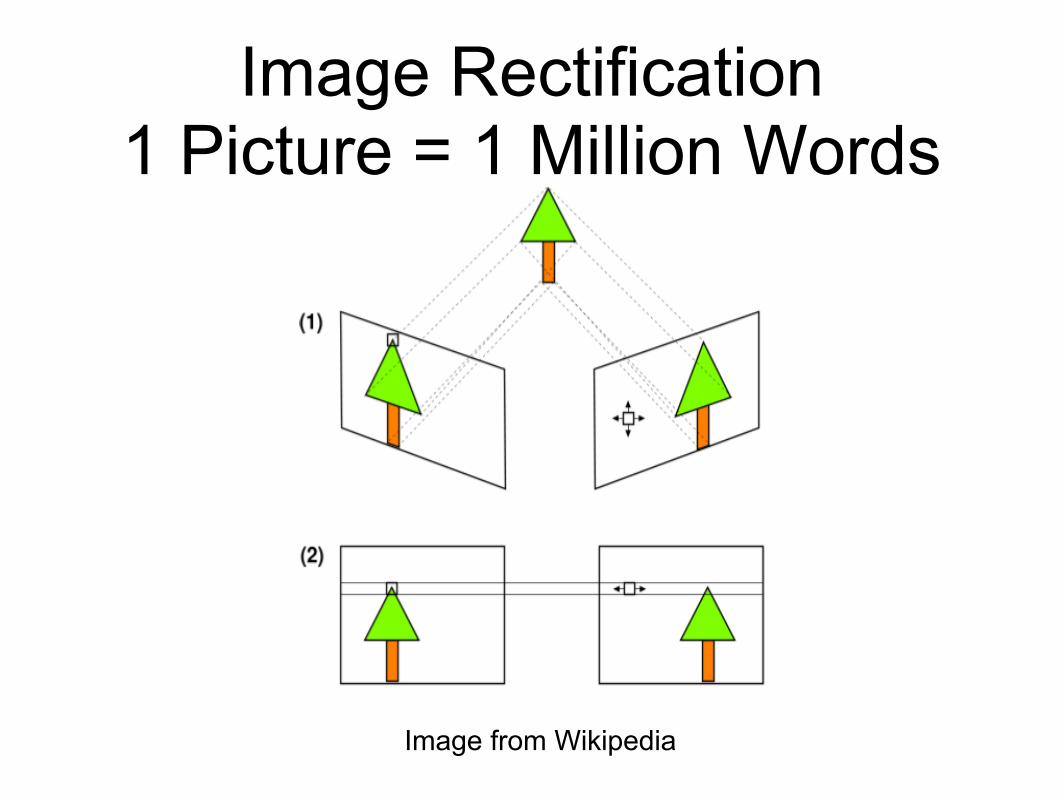
Image Rectification1 Picture = 1 Million Words
Image from Wikipedia
Disparity MapGiven rectified images, calculate distance between pixels that were projected from the same point in 3D spaceResult is a disparity map:
A grayscale image whose intensity in each pixel reflects the depth of the point in the scene that was projected to that pixel

Disparity Map for Dogbert
Left Right Disparity Map+ =
Point Cloud ViewerGiven disparity map, can re-project points in image back to 3D spaceResult is a point cloudWe generate a point cloud for each texture in the RTI and merge the results
Hence 9 mini point clouds for an order 3 RTI
Point Cloud ViewerDemo









![Response to Intervention (RtI) Handbook and RtI Resources · 2016-12-09 · OASD RtI Handbook [2] Response to Intervention (RtI) Overview Core Principles of RtI RtI is grounded in](https://img.pdfslide.net/doc/110x75/5f04175d7e708231d40c46b9/response-to-intervention-rti-handbook-and-rti-resources-2016-12-09-oasd-rti.jpg)



















