Embed Size (px)
Citation preview
3D with EUVI images using optical flow
First attempt on 30.4nm images
Samuel Gissot
Jean-François Hochedez
SIDC/Royal Observatory of Belgium
5th SECCHI Consortium MeetingOrsay, France. March 05-08 2007.
3D reconstruction methodoutline of the talk
Aim Prominence altitude Altitude gradients in supergranules?
Mutual registration of EUVI-A and B images Limb fitting (center and radius estimations) Roll angle, rotation transform and header parameters
Optical flow Apparent displacement estimation Error prediction
Stereoscopic reconstruction Formula Confidence level and limitations
Outlooks
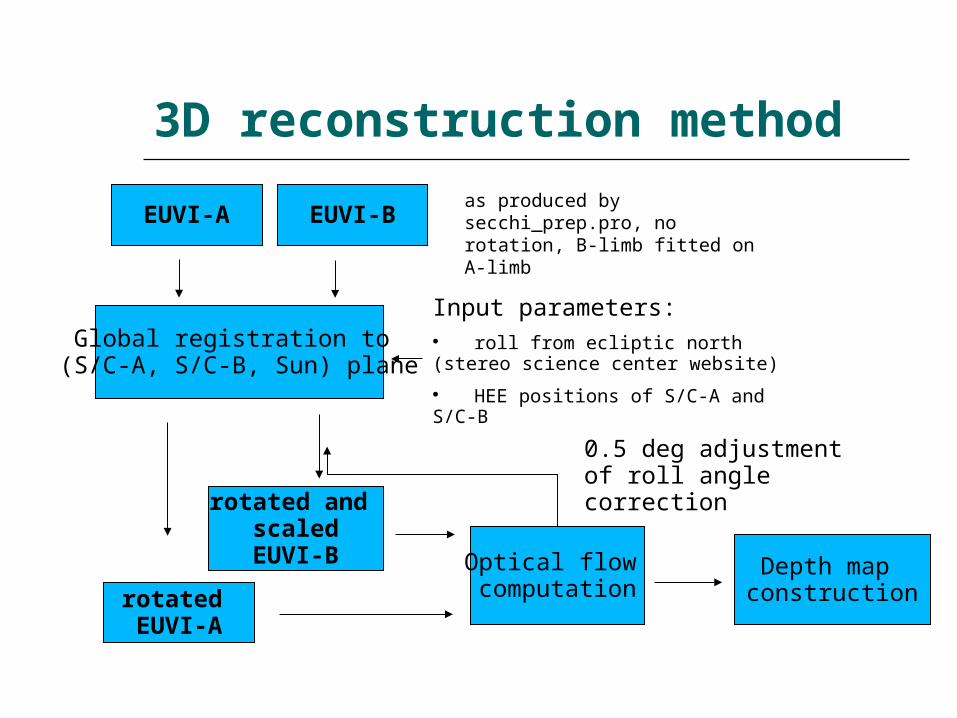
3D reconstruction method
Global registration to (S/C-A, S/C-B, Sun) plane
EUVI-A EUVI-B
rotated EUVI-A
rotated and scaled
EUVI-B
Input parameters: roll from ecliptic north (stereo science center website)
HEE positions of S/C-A and S/C-B
Optical flow computation
Depth map construction
as produced by secchi_prep.pro, no rotation, B-limb fitted on A-limb
0.5 deg adjustment of roll angle correction
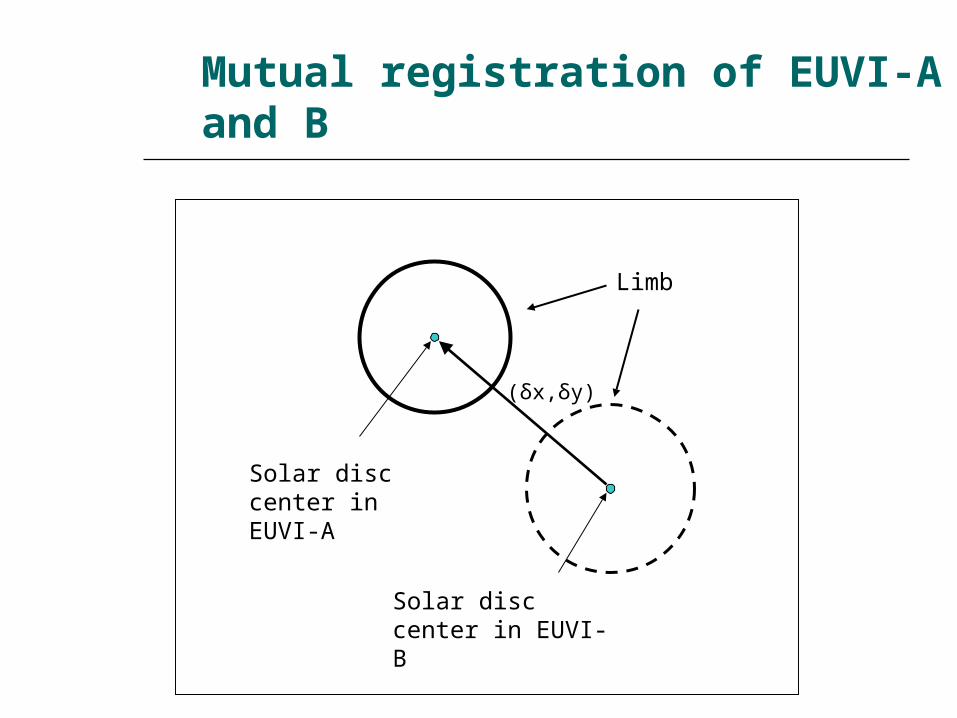
Mutual registration of EUVI-A and B
(δx,δy)
Solar disc center in EUVI-A
Solar disc center in EUVI-B
Limb
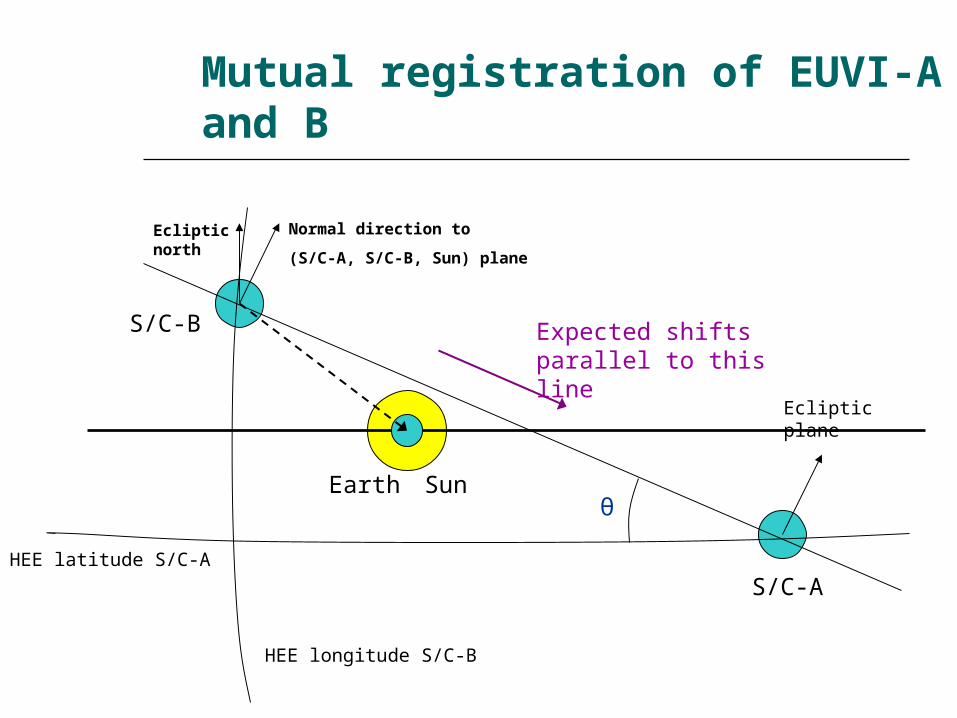
Mutual registration of EUVI-A and B
Ecliptic plane
S/C-B
S/C-A
SunEarth
Normal direction to
(S/C-A, S/C-B, Sun) plane
Ecliptic north
θ
Expected shifts parallel to this line
HEE latitude S/C-A
HEE longitude S/C-B
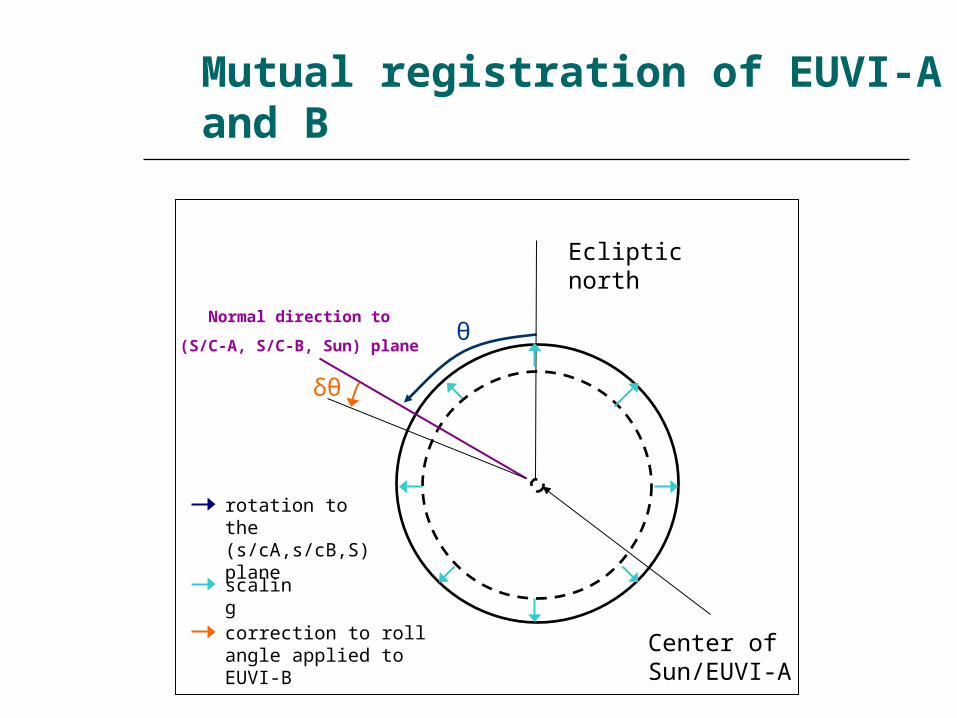
Mutual registration of EUVI-A and B
Ecliptic north
Normal direction to
(S/C-A, S/C-B, Sun) plane
Center of Sun/EUVI-A
scaling
rotation to the (s/cA,s/cB,S) plane
correction to roll angle applied to EUVI-B
δθ
θ
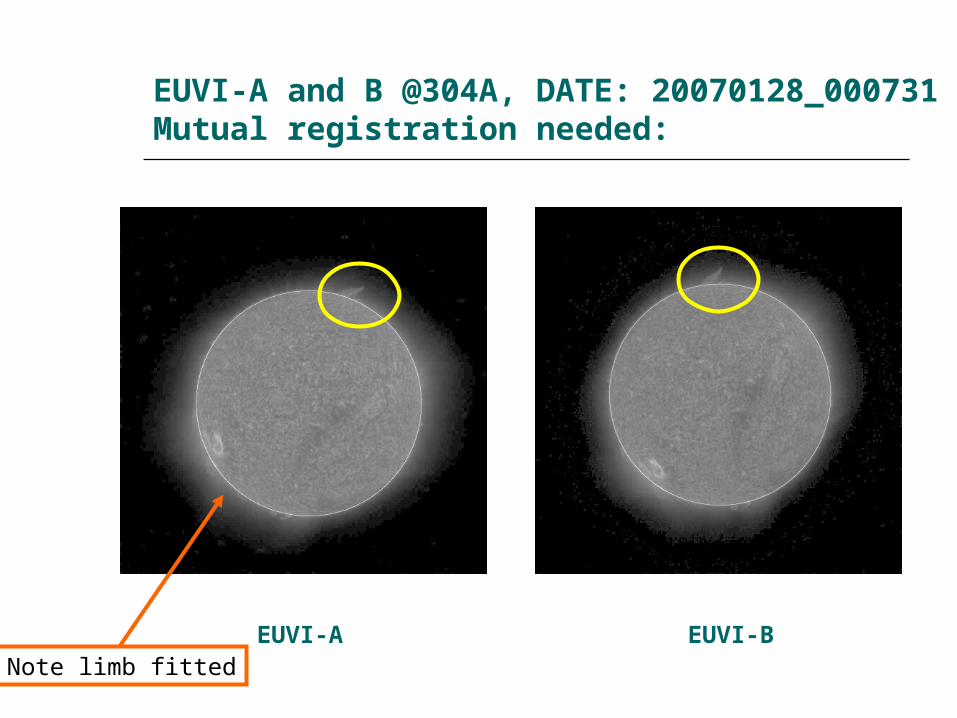
EUVI-A and B @304A, DATE: 20070128_000731Mutual registration needed:
EUVI-A EUVI-BNote limb fitted
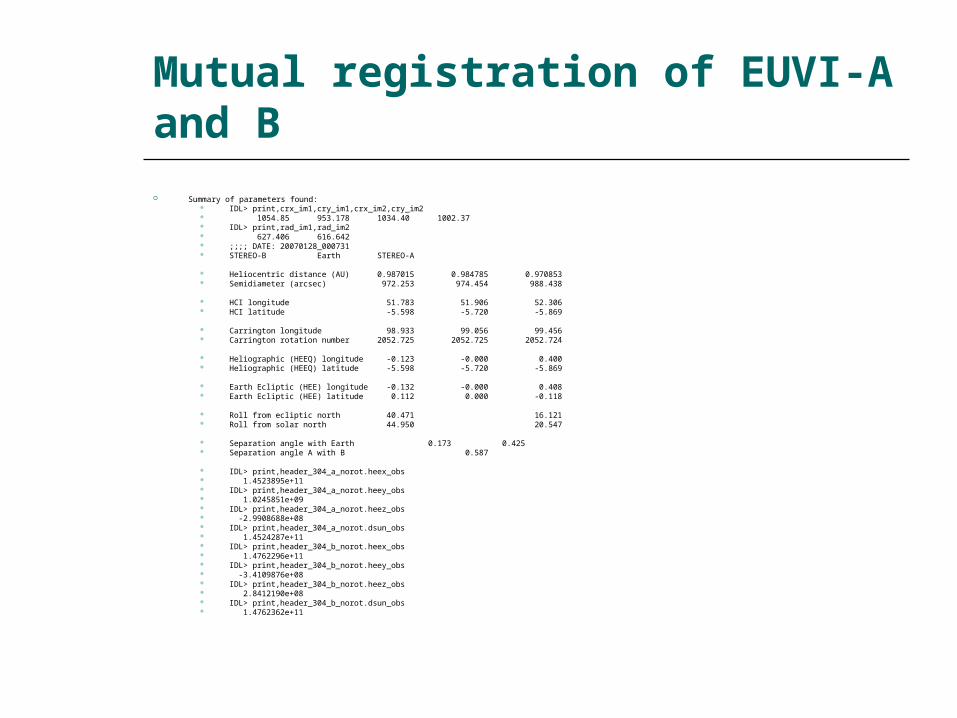
Mutual registration of EUVI-A and B
Summary of parameters found: IDL> print,crx_im1,cry_im1,crx_im2,cry_im2 1054.85 953.178 1034.40 1002.37 IDL> print,rad_im1,rad_im2 627.406 616.642 ;;;; DATE: 20070128_000731 STEREO-B Earth STEREO-A
Heliocentric distance (AU) 0.987015 0.984785 0.970853 Semidiameter (arcsec) 972.253 974.454 988.438
HCI longitude 51.783 51.906 52.306 HCI latitude -5.598 -5.720 -5.869
Carrington longitude 98.933 99.056 99.456 Carrington rotation number 2052.725 2052.725 2052.724
Heliographic (HEEQ) longitude -0.123 -0.000 0.400 Heliographic (HEEQ) latitude -5.598 -5.720 -5.869
Earth Ecliptic (HEE) longitude -0.132 -0.000 0.408 Earth Ecliptic (HEE) latitude 0.112 0.000 -0.118
Roll from ecliptic north 40.471 16.121 Roll from solar north 44.950 20.547
Separation angle with Earth 0.173 0.425 Separation angle A with B 0.587
IDL> print,header_304_a_norot.heex_obs 1.4523895e+11 IDL> print,header_304_a_norot.heey_obs 1.0245851e+09 IDL> print,header_304_a_norot.heez_obs -2.9908688e+08 IDL> print,header_304_a_norot.dsun_obs 1.4524287e+11 IDL> print,header_304_b_norot.heex_obs 1.4762296e+11 IDL> print,header_304_b_norot.heey_obs -3.4109876e+08 IDL> print,header_304_b_norot.heez_obs 2.8412190e+08 IDL> print,header_304_b_norot.dsun_obs 1.4762362e+11
Optical flow method
Gissot S., Hochedez (2007) A&A volume 464, issue 3:
Multiscale optical flow probing of dynamics in solar EUV images. Algorithm, calibration and first results
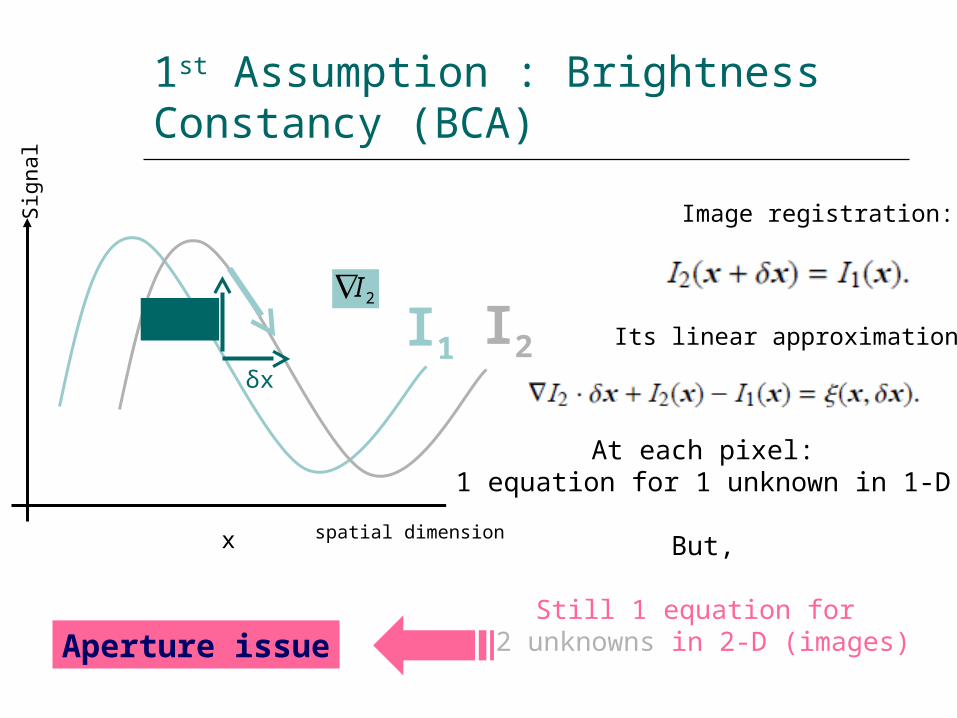
1st Assumption : Brightness Constancy (BCA)
Its linear approximation:
At each pixel:1 equation for 1 unknown in 1-D
But,
Still 1 equation for 2 unknowns in 2-D (images)Aperture issue
Sig
nal
spatial dimension
Image registration:
I1 I2I2-I1
2I
x
δx
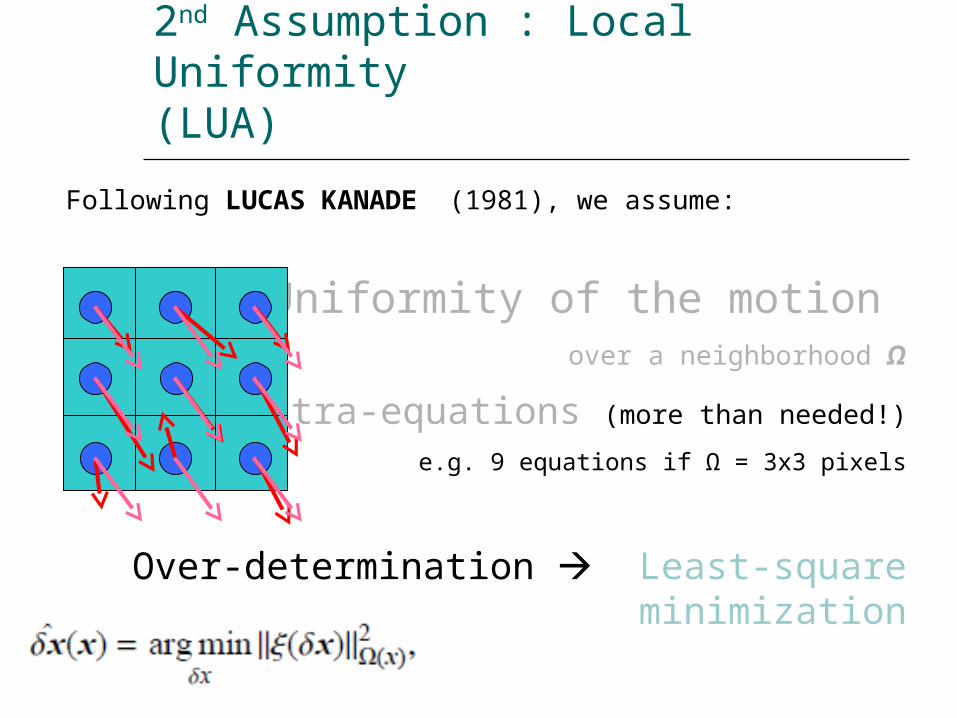
Following LUCAS KANADE (1981), we assume:
Uniformity of the motion over a neighborhood Ω
Extra-equations (more than needed!)
e.g. 9 equations if Ω = 3x3 pixels
Over-determination Least-square minimization
2nd Assumption : Local Uniformity(LUA)
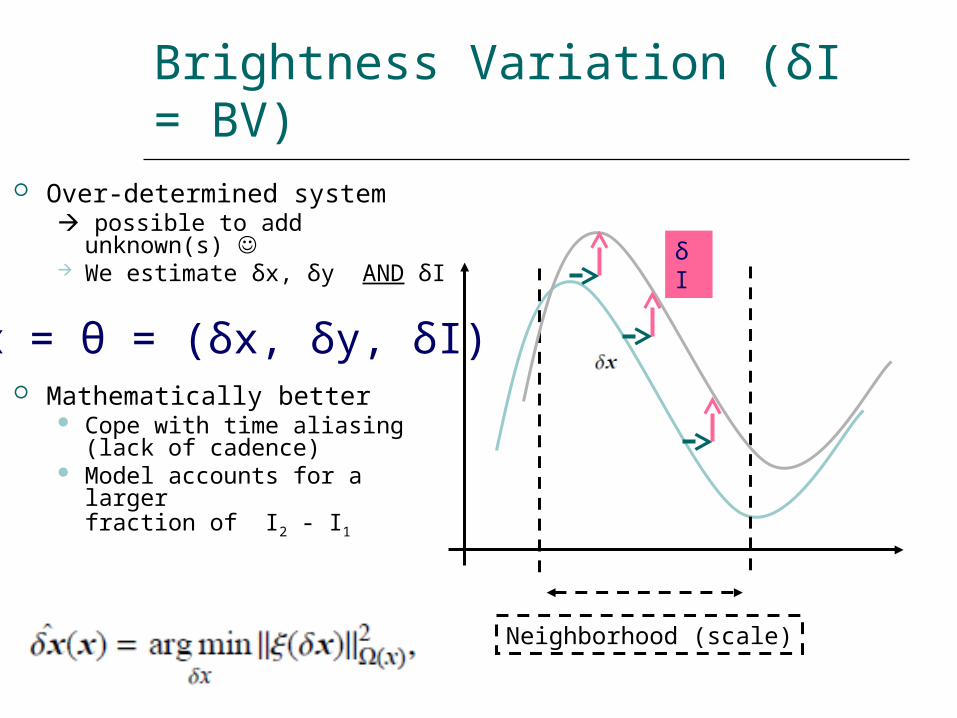
Brightness Variation (δI = BV) Over-determined system
possible to add unknown(s)
We estimate δx, δy AND δI
Mathematically better Cope with time aliasing
(lack of cadence) Model accounts for a larger
fraction of I2 - I1
Neighborhood (scale)
δx = θ = (δx, δy, δI)
δI
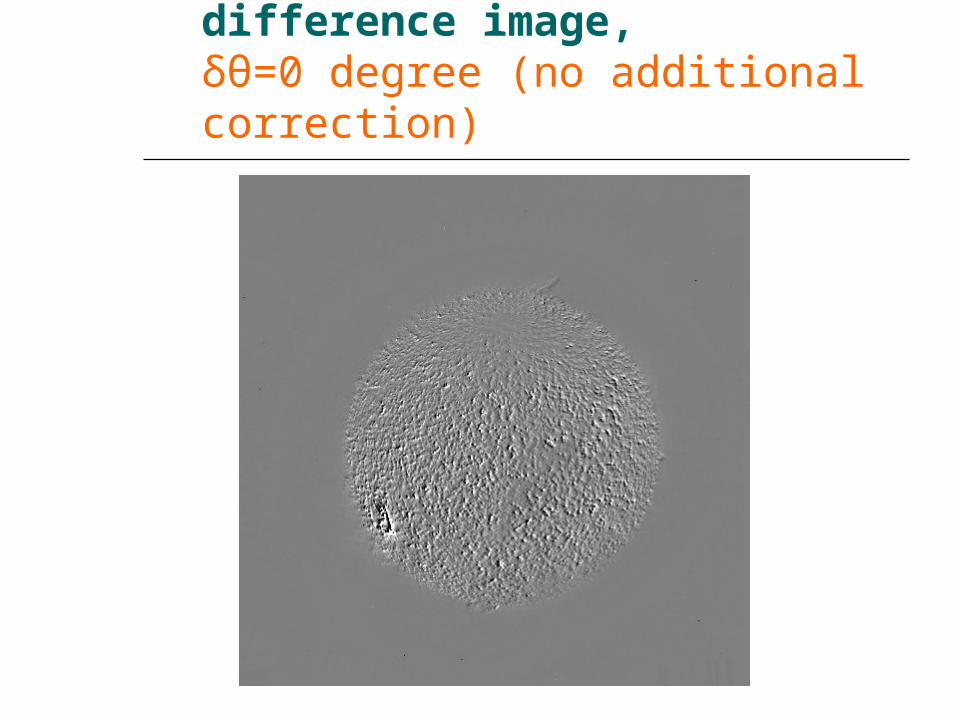
Mutual registration of EUVI-A and B:difference image,δθ=0 degree (no additional correction)
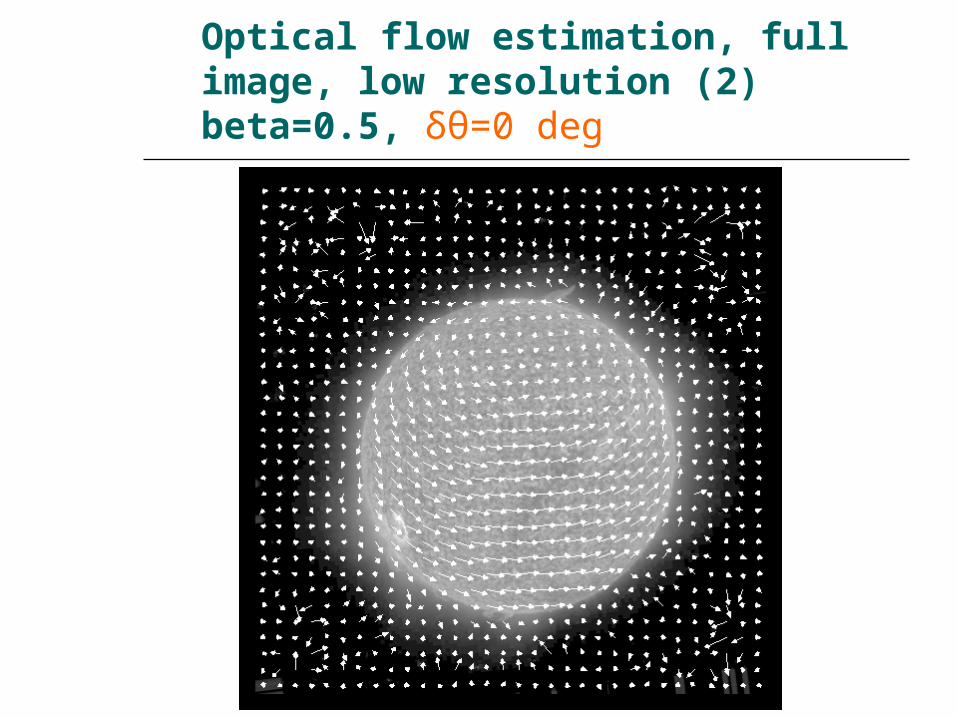
Optical flow estimation, full image, low resolution (2)beta=0.5, δθ=0 deg

Mutual registration of EUVI-A and B:difference image, δθ=0.5 degree
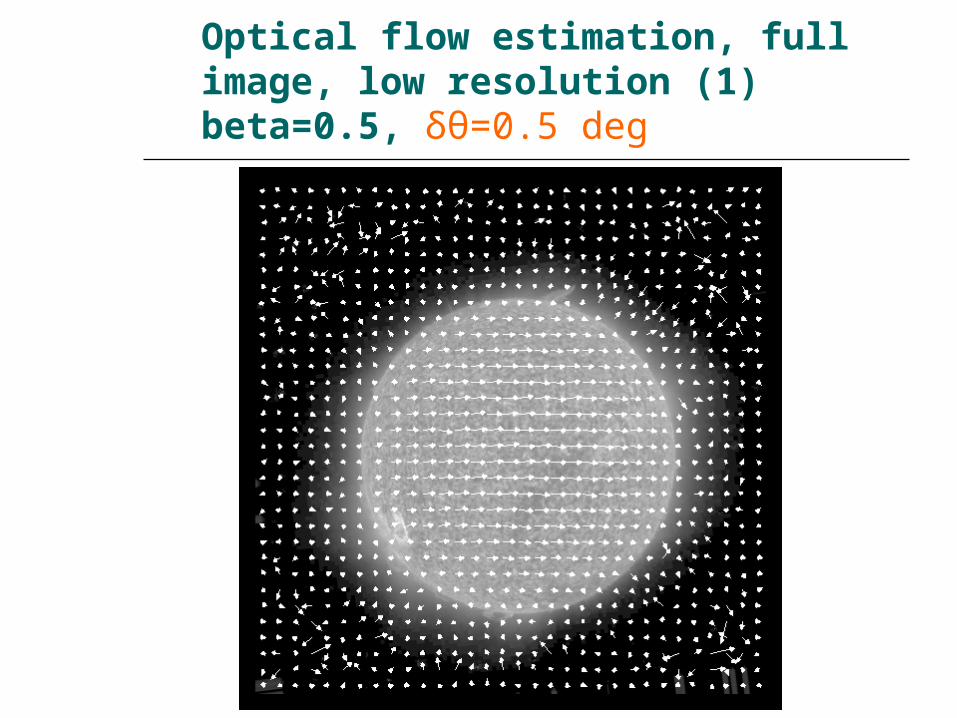
Optical flow estimation, full image, low resolution (1)beta=0.5, δθ=0.5 deg
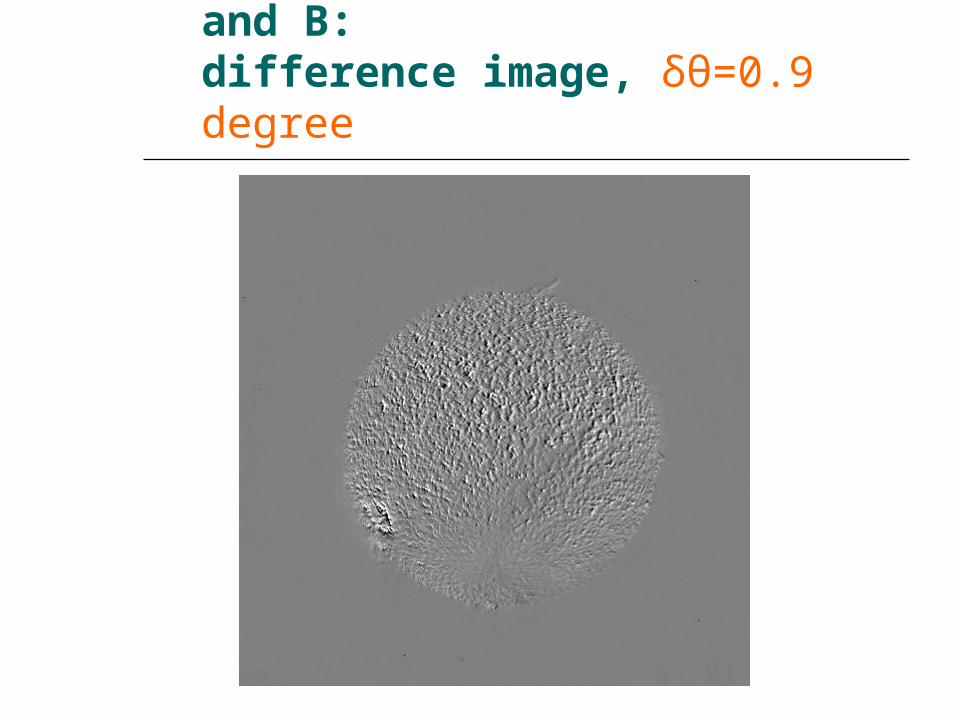
Mutual registration of EUVI-A and B:difference image, δθ=0.9 degree
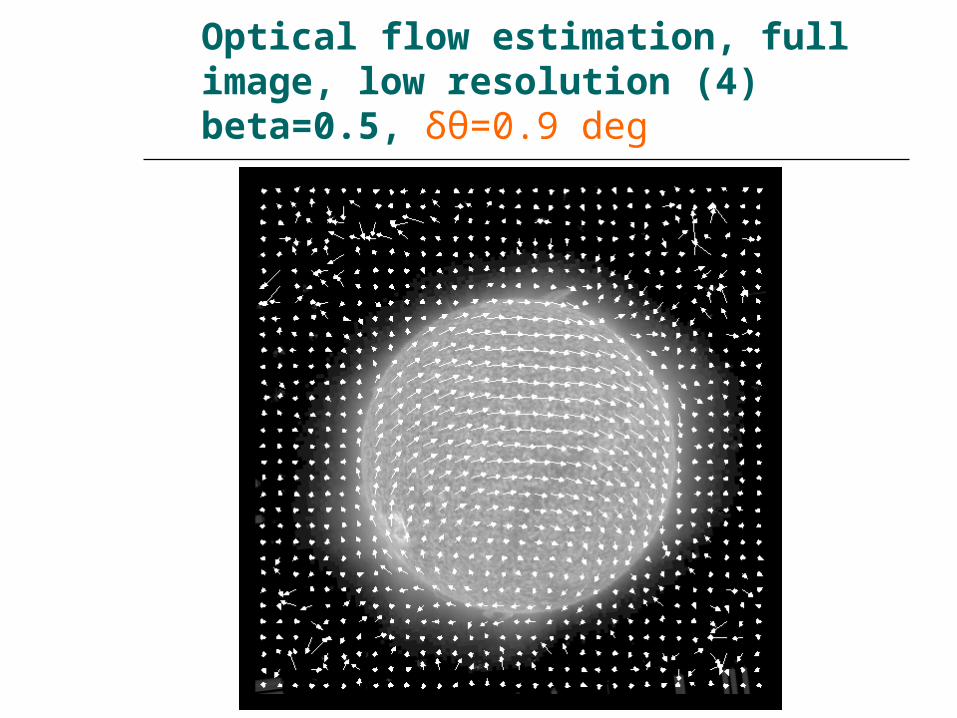
Optical flow estimation, full image, low resolution (4) beta=0.5, δθ=0.9 deg
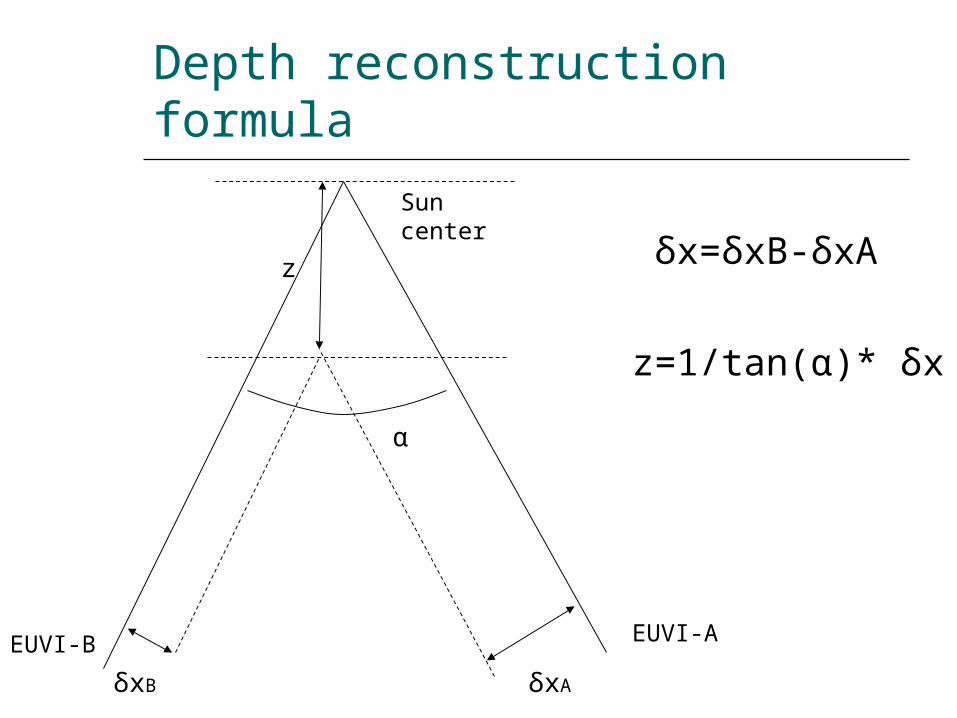
Depth reconstruction formula
Sun center
z
EUVI-B EUVI-A
δxB δxA
δx=δxB-δxA
z=1/tan(α)* δx
α
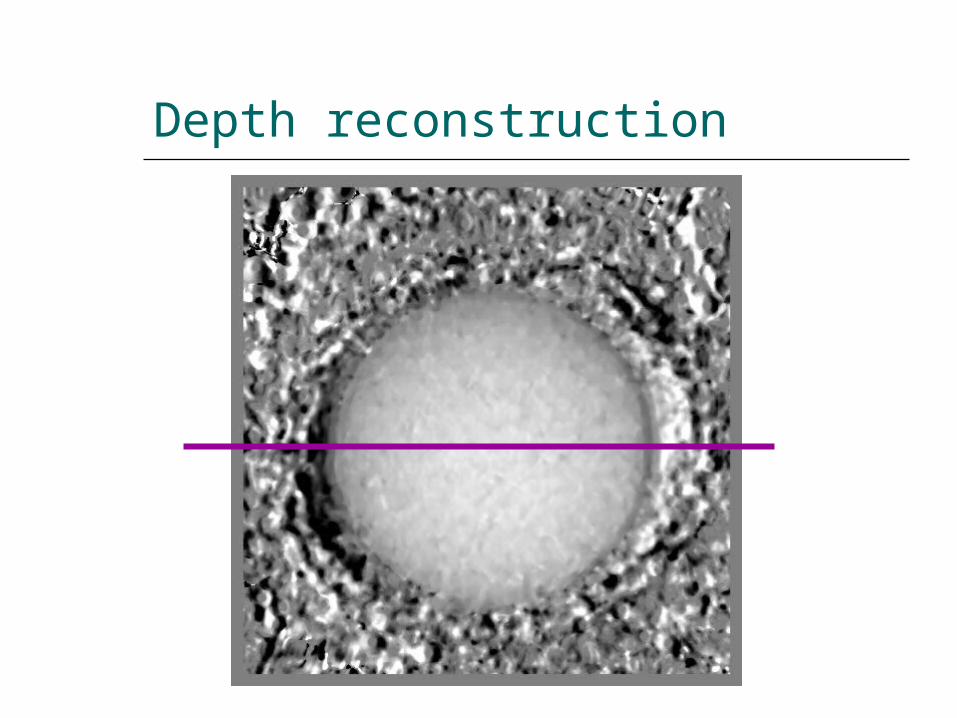
Depth reconstruction
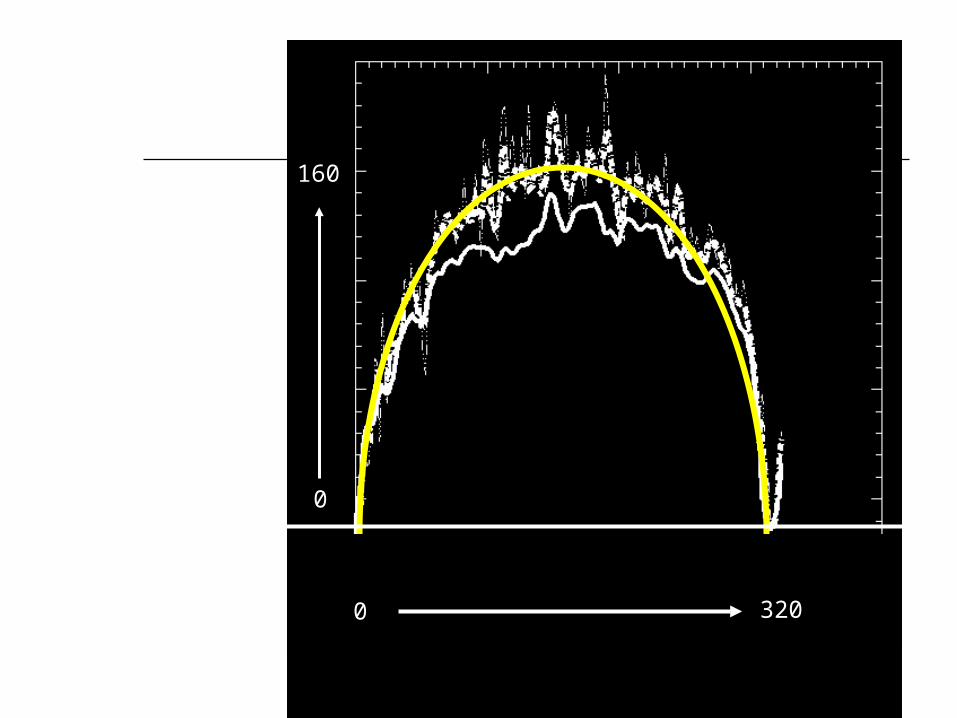
0
160
0 320
Discussion (1/2)
Brightness change remains to be interpreted Transparency of SiXI emission
DEM “purification” will help Slight flatfields mis-match?
Error map on the optical flow remains to be exploited (method provides it)
Hope for best roll angles from headers
Discussion (2/2)
The flow could help to estimate δθ Origin of δθ (roll angle correction) ?
Misalignment between instruments and S/C pointing?
Static or not? Correction method
Bug in our method??
Conclusions
Calibration study: Refinement of roll angle between
stereo A and B First attempt of optical-flow
application to 3D reconstruction: Initial global matching, optical-flow
estimation and 3D interpretation Under construction:
www.sidc.be/velociraptor