Embed Size (px)
DESCRIPTION
Motores Dc
Citation preview

Motores y generadores
1
Maquinas DC

El Comienzo de Máquinas Eléctricas
1820 – H.C. Oersted descubrió que una corriente eléctrica
puede producir campos magnéticos.
1831 – Faraday descubrió que el movimiento de un campo
magnético puede generar una corriente eléctrica en un
conductor.
Con estos dos fundamentos fue posible desarrollar motores
eléctricos y generadores eléctricos.

La Dinamo
1827 - Ányos Jedlik demostró el primer diseño con los
componentes básicas de motores modernos – el estator, rotor, y
conmutador.
1836 – Hippolyte Pixii fabricó el primer modelo de la dinamo -
el primer generador eléctrico capaz de generar energía potencia
para uso industrial
Correa guiado dinamo de alta corriente

4

FEM
5

Análisis F.E.M.
6

7
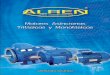
Generación del movimiento de rotación
8

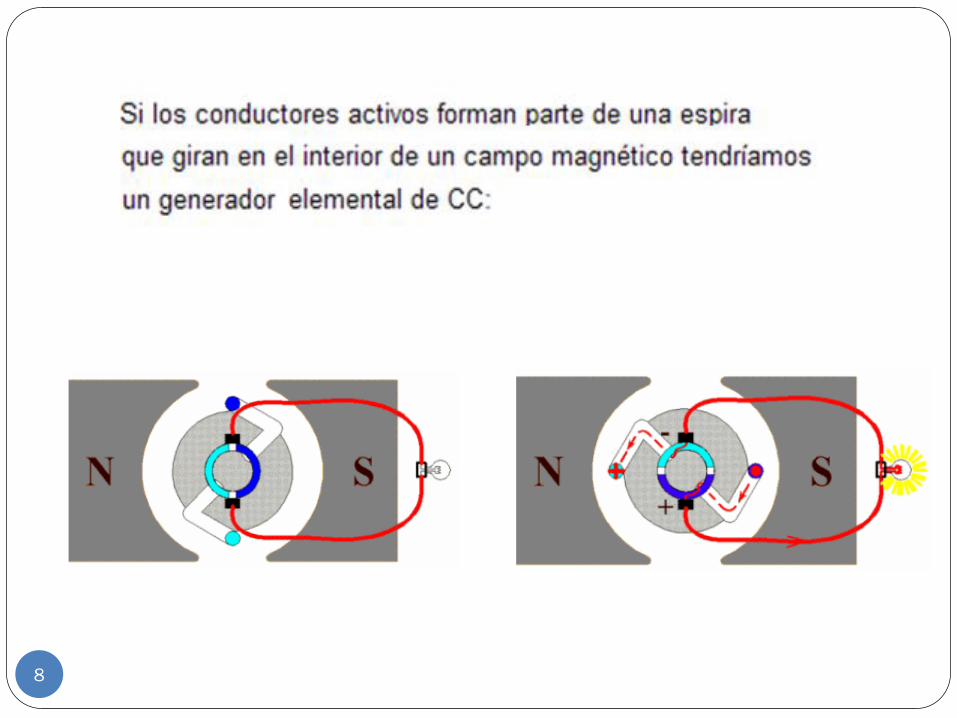
FUERZA ELECTROMAGNETICA
9

Análisis Fuerza Electromagnética
10

11

12

13

14

15
Ejercicos libro Maquinas Electricas McGrawHill 4e. Stephen Chapman
• Capitulo 8 Fundamentos Maquinas DC – Ejercicios del 8.3,8.4,8.6,8.8

16

17

18

19
1
2
3
4

20

21

22

Técnicas de conexión bobina de la maquina DC ventajas y desventajas.
Como se reducen las perdidas por histéresis y Eddy en las maquinas DC
Los polos de conmutación para que sirven
1-
2-
23

24

25

26

27

28

29

30
31

32

Investigar Sobre Sistemas de Conmutador y escobillas y regulación
de voltaje en estos y perdidas en estos.
Ventajas de usar en los carros alternador y no generadores DC.
Constante K de las maquinas DC, que parámetros enlaza y por que
es importante.
Condiciones son necesarias para que el campo magnético
produzca una fuerza sobre un conductor.
Condiciones son necesarias para que el campo magnético
produzca un voltaje sobre un conductor.
Como puede un Colector de voltaje de AC en voltajes DC en el
inducido de una maquina.
Tipos de perdidas en los motores DC
33
Características Motores DC
Arrollamiento Estator=Devanado de campo=Devanado de excitación
Las bobina de la excitación se pueden substituir por los imanes permanentes.
Muchos de los motores modernos de la C.C. confían en la excitación del imán
permanente y en tal caso no hay ninguna posibilidad de cambiar el flujo de la
excitación, puesto que es fijado por las características del imán.
El rotor gira en cierto ω angular de la velocidad [rad/s],
ω [rad/s] N [RPM] ω = (2π 60) N.
n [rpm] = (60/2 π) ω [rad/s]
34

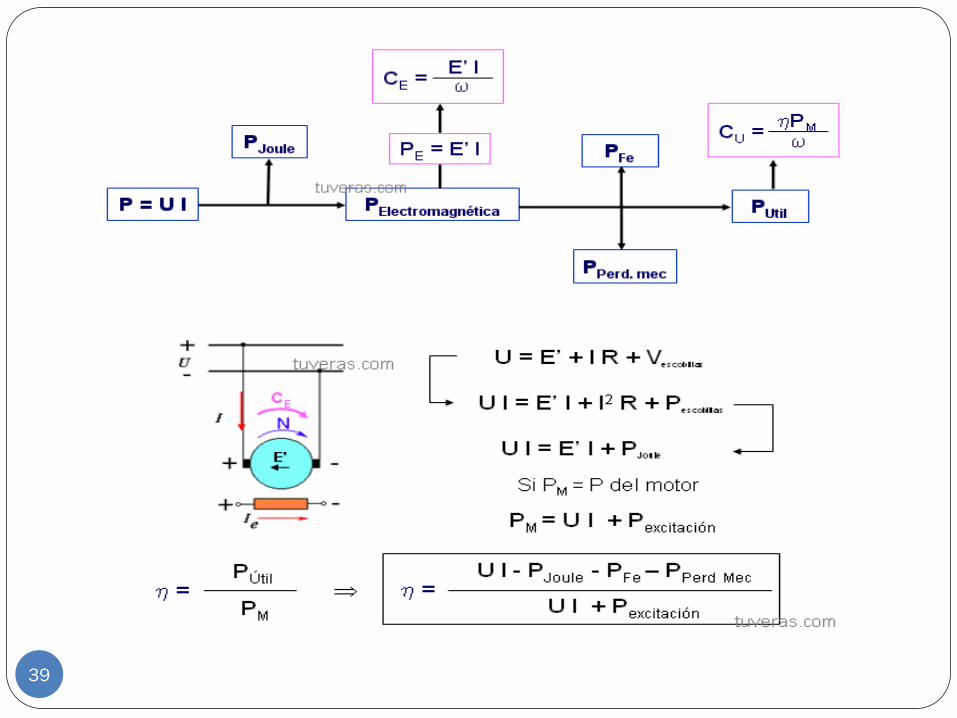
Formulas Generales Motores DC
Va = Ra Ia + E
Te = c2 Φf Ia = kIf Ia
Te=Torque Eléctromagnetico
Pin = VaIa + Vf If
Pout = Te ω
Ploss = Pin – Pout
η = Pout / Pin
T= KT I
E=KE ω
Kt – Torque Constant =N-m/A= (Newton-meters/Ampere) or oz.-in/A (Oz.-in/Ampere)
KE - Voltage constant = volts/radians/seconds = volts/krpm (Volts per Thousand rpm)
T – Torque = Nm (Newton-meters)
E = KE ⋅ω + I ⋅ RARMADURA

36
Directamente proporcional
Inversamente proporcional
¿Porque entonces si el torque en la realidad
aumenta tiende aumentar velocidad aumenta?
4 condiciones

37
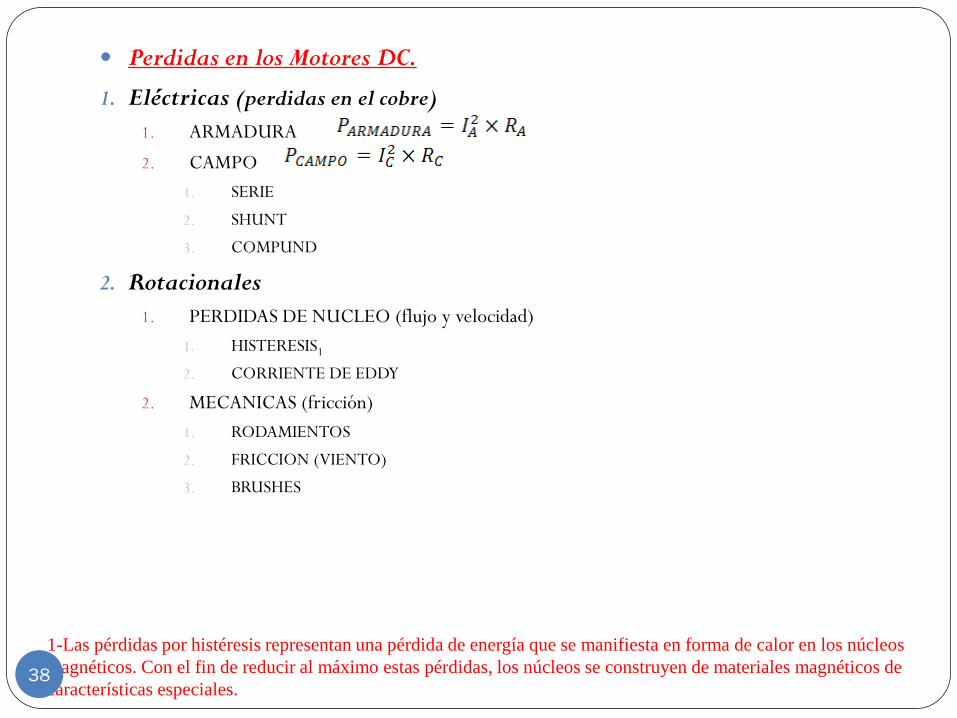
Perdidas en los Motores DC.
1. Eléctricas (perdidas en el cobre)
1. ARMADURA
2. CAMPO
1. SERIE
2. SHUNT
3. COMPUND
2. Rotacionales
1. PERDIDAS DE NUCLEO (flujo y velocidad)
1. HISTERESIS1
2. CORRIENTE DE EDDY
2. MECANICAS (fricción)
1. RODAMIENTOS
2. FRICCION (VIENTO)
3. BRUSHES
1-Las pérdidas por histéresis representan una pérdida de energía que se manifiesta en forma de calor en los núcleos
magnéticos. Con el fin de reducir al máximo estas pérdidas, los núcleos se construyen de materiales magnéticos de
características especiales. 38
39

40
41

42
En la práctica se utilízan diversos motores de corriente continua como:
-De excitación independiente.
-De excitación serie / universal.
-De excitación derivación (shunt).
-De excitación compuesta en conexión adicional (compound).
-De imanes permanentes.
-Especiales.
43
Un motor de corriente continua queda definido por: -Red que alimenta al arrancador / variador (tensión y sistema de c.a.).
-Tipo de motor en función de la c. c.
-Potencia en kW.
-Velocidad máxima en rpm.
-Gama de trabajo, mínima y máxima.
-Par a transmitir, en Nm.
-Tensión del inducido, en V.
-Tensión del inductor, en V.
-Intensidad del inducido, en A.
-Intensidad del inductor, en A.
-Grado de protección IP.
-Tipo de fijación y salida del eje.

44
El tipo de convertidor necesario depende de la clase de servicio que se requiera, las
que pueden ser:
Servicio clase I
Empleo al 100% de In, sin posibilidad de sobrecarga.
Servicio clase II
Empleo al 100% de In, con posibilidad de 150% de In durante 1 minuto, que puede
repetirse cada hora.
Servicio clase III
Empleo al 1 00% de In, con posibilidad de 125% de In durante 2 hs. y del 200% de
In durante 10 seg.
A cada sobrecarga debe seguir el tiempo para que el motor adquiera su temperatura
de régimen.

45

1. Serie
Bobina inductora pocas espiras, hilo grueso Par de arranque elevado Velocidad suave (todo aumento de carga provoca disminución velocidad y viceversa) Accionar Grúas, trenes eléctricos
46 46

2. Paralelo Bobina inductora muchas espiras de hilo fino
Par arranque mediano
Velocidad dura (la velocidad es independiente de la carga)
Tornos, taladradoras
47 47
48
Motor de excitación independiente -Par de arranque muy elevado.
-Fácil control de velocidad en forma automática.
-Requiere reóstato de arranque.
-Se utiliza en motores pequeños.
Motor de excitación serie -Par de arranque muy elevado.
-Difícil control de velocidad.
-Requiere reóstato de arranque.
-Se utiliza para tracción eléctrica.
Motor con excitación derivación (shunt) -Par de arranque menor que en el motor serie.
-Muy estable.
-Requiere reóstato de arranque en el inducido.
-Utilizado en máquinas herramientas.

49
Motor con excitación compuesta -Par de arranque más elevado que el motor en derivación.
-Muy estable.
-Requiere reóstato de arranque en el inducido.
-Utilizado en máquinas herramientas y para tracción.
En estos motores la FEM en reposo es cero, y por consiguiente, la corriente y el par
de arranque sólo quedan limitados por la resistencia del circuito de inducido.
Los motores de corriente continua pueden arrancar por diferentes procedimientos
actuando sobre la tensión. Los más utilizados son el reóstato de regulación y los
dispositivos electrónicos de rectificación controlada.

50

51
52
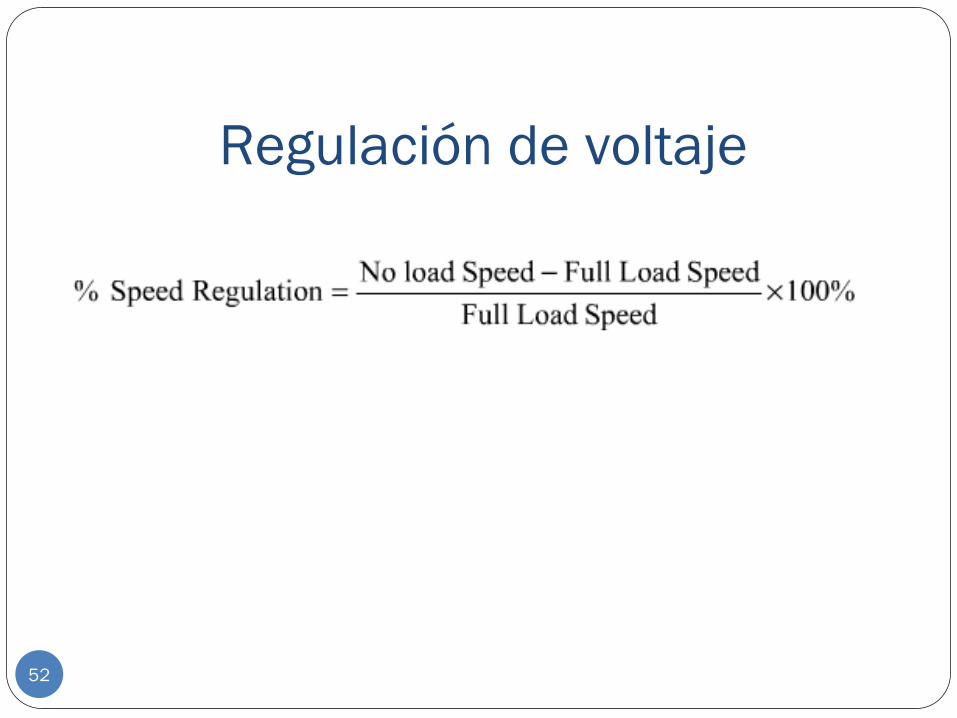
Regulación de voltaje

Curvas de rendimiento Motores DC
53

54

55
¿Cómo se controla la velocidad a un motor DC o cuales técnicas
son usadas para los siguientes motores DC?
Excitación Serie
Excitación paralelo
Excitación Compuesta
Frenado en los motores DC como se ejecuta y cuales son las
técnicas usadas.
Frenado Dinámico
Con Corriente inversa
Freno Regenerativo
Mostrar video frenado por Corrientes parasitas

56
57

58

Investigar condiciones necesarias para conectar generadores DC en paralelo
Generador Excitación serie
Generador Excitación Shunt
Generador Excitación Compuesta
59

Curvas importantes en los generadores DC
1. Características de no saturación Ea/If
1. Características circuito abierto
2. Relacion entre curva de magnetizacion y le material electromagnetico
2. Características internas Ea/Ia
3. Características externas V/I
60

61

62
Factores que influyen para que no se genere el voltaje dentro de un generador
DC autoexcitado.

63

Donde se usa los generadores DC Series
Donde se usa los generadores DC Compund
Donde se usa los generadores DC Shunt
64

65

Pruebas en los motores DC presentar PDF pérdidas y
eficiencia. (Quiz)
66

Ejercicos libro Maquinas Electricas McGrawHill 4e. Stephen Chapman
Capitulo 9 Motores y generadores DC Ejercicios del 9.1 al 9.6,9.13, 9.15,9.21,9.22, 9.27,
67

Como elegir el motor correcto de la C.C. para un uso específico
1. Determinar la mejor opción del motor de C.C. para un parámetro funcional dado del requisito o de diseño.
2. Requisito funcional
3. Parámetros de diseño
1. Tiempo
2. Dinero
3. Conocimiento
4. Potencia
5. Peso
68
VER EJEMPLO SIGUIENTE
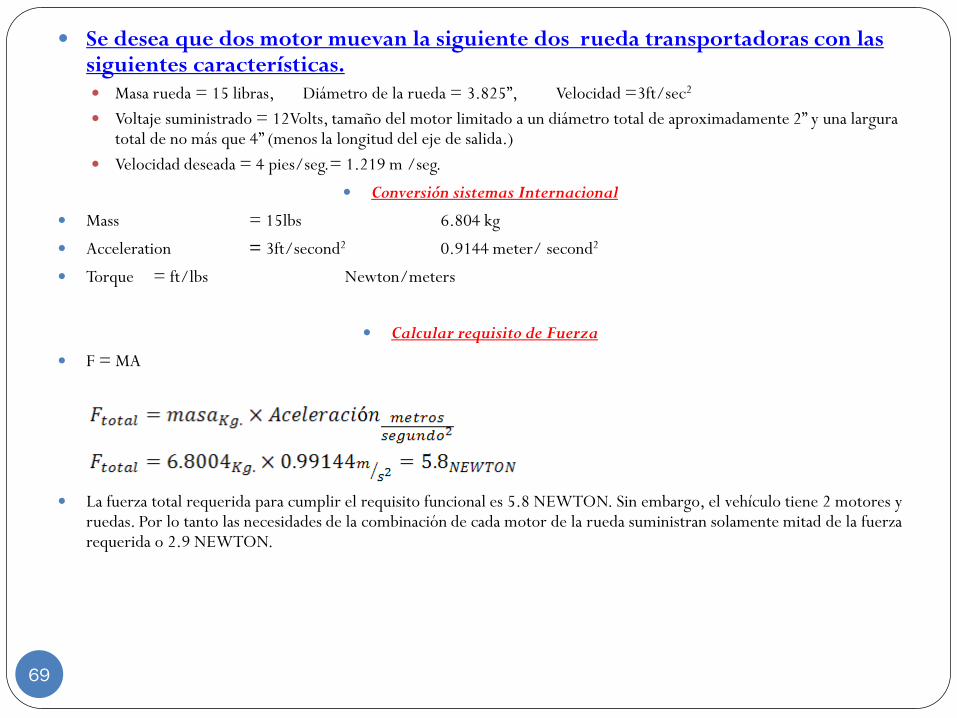
Se desea que dos motor muevan la siguiente dos rueda transportadoras con las siguientes características. Masa rueda = 15 libras, Diámetro de la rueda = 3.825”, Velocidad =3ft/sec2
Voltaje suministrado = 12Volts, tamaño del motor limitado a un diámetro total de aproximadamente 2” y una largura total de no más que 4” (menos la longitud del eje de salida.)
Velocidad deseada = 4 pies/seg.= 1.219 m /seg.
Conversión sistemas Internacional
Mass = 15lbs 6.804 kg
Acceleration = 3ft/second2 0.9144 meter/ second2
Torque = ft/lbs Newton/meters
Calcular requisito de Fuerza
F = MA
La fuerza total requerida para cumplir el requisito funcional es 5.8 NEWTON. Sin embargo, el vehículo tiene 2 motores y ruedas. Por lo tanto las necesidades de la combinación de cada motor de la rueda suministran solamente mitad de la fuerza requerida o 2.9 NEWTON.
69

Calcular el requisito de TORQUE para cada rueda.
1. Distancia = Radio Rueda= Radio de la Rueda /2 = 3.825”/2 pulgada
=0.0486 m.
2. Fuerza = 2.9 Newtons
3. El esfuerzo de torsión requerido en cada rueda es
de 0.14094 Newton.metro
Calcular el requisito de velocidad.
1. Diametro rueda= 3.825” = 0.0971 meters
2. Circunferencia Rueda= π x Diametro = 3.142 x 0.0971 m = 0.305 metros
3. Velocidad requerida` = 4ft/sec = 1.219 m/seg.
4. RPS =revoluciones por segundo = rpm/60
70

Buscar una Marca o Fabricante que cumpla con nuestros requisitos de diseño.
Torque= 0.1409 N.m= 1.247 pulg.lb.= 19.95 pulg.onza
Velocidad rueda= 239 R.P.M.= 3.996 R.P.S.= 25 Radians Seg.
Fabricante a Usar:
Pittman Motors/Penn Engineering website:
http://www.ametektip.com/index.php?option=com_content&task=view&id=168&Itemid=99
Después seleccionamos (Link products)
http://www.ametektip.com/index.php?option=com_content&view=article&id=47&Itemid=107&lang=en
Después seleccionamos (Link Brush Motors ) buscar catalogos pitman express
SELECCIONAREMOS EL MOTOR CORRECTO
NOTA SI QUISERAMOS ADAPTARLE REDUCCIONES O ACOPLES DEBEMOS SABER LA RELACION
DE SALIDA DE ESTOS.
71

72

Investigación Factores que influyen en la Vibración excesiva en motores DC
73

74

75

76

77
Es muy difícil analizar cualitativamente la transformada de Laplace y la transformada Z, ya que al
graficar su magnitud y ángulo a su parte real e imaginaria
da como resultado varias graficas de superficies de dos dimensiones en espacios de tres dimensiones.
Por esta razón, es común el examinar la grafica de la función de transferencia con sus polos y ceros y
tratar una vez mas una idea cualitativa de lo que hace el sistema.
Dada a una función de transformación continua, en el dominio de Laplace, H(s), o en el dominio discreto de
Z, H(z), un cero es cualquier valor de s o z
para los cuales la función de transferencia es cero, un polo es cualquier valor de s o z para la cual la función de
trasferencia es infinita. Lo siguiente da a una definición precisa:
DEFINITION 1: Ceros
1. El valor(es) para zdonde el numerador de la función de trasferencia es iguala cero
2. Las frecuencias complejas que hacen que la ganancia de la función de transferencia del filtro sea cero.
DEFINITION 2: polos
1. El valor(es) para zdonde el denominador de la función de transferencia es igual a cero
2. Las frecuencias complejas que hacen de la ganancia de la función de transferencia del filtro se infinita.

78

79
Presentar El PDF
Digrama Transferencia Bode, Nysquist, etc
80

Simulink Proyecto Final Motores DC
Hallar la funcion de transferencia para uno de los motores DC Simulink y graficar para las condicione de campo serie, shunt, compund, independiente. Graficar el flujo magnetico que se produce si estos funcionan por 20 segundo.
Graficar Diagrama de bode, nysquits, etc.
81
82
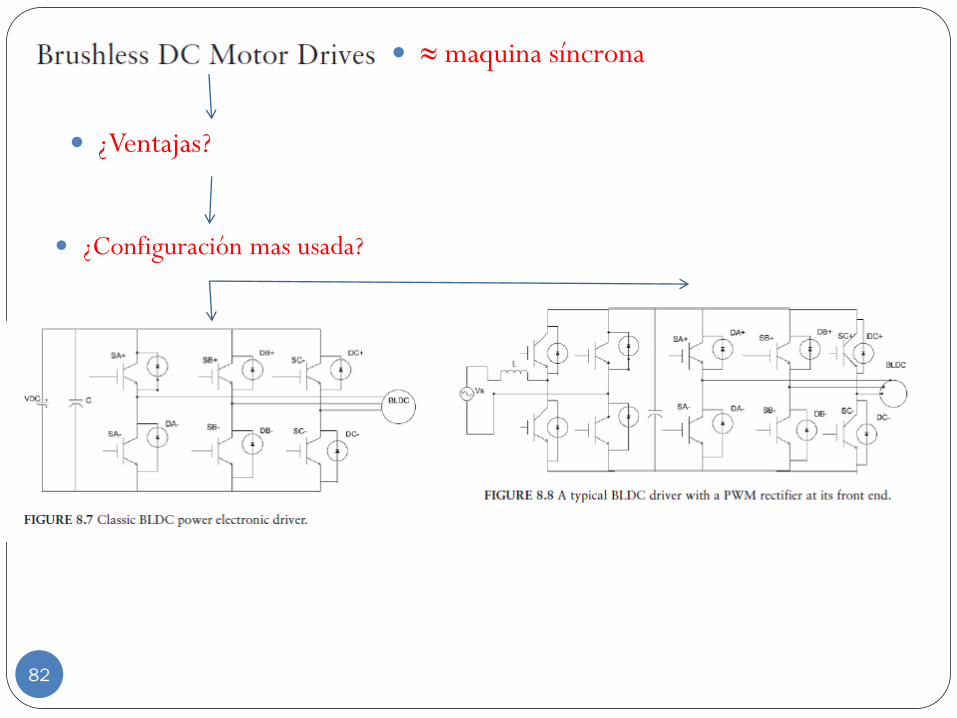
≈ maquina síncrona
¿Ventajas?
¿Configuración mas usada?

83













![[XLS]mibadas.files.wordpress.com · Web view1.0 2.0512134E7 4.0 2.0 2.0512134E7 4.0 3.0 2.0512134E7 4.0 4.0 2.0512134E7 4.0 5.0 2.0512134E7 4.0 6.0 2.0512134E7 4.0 7.0 2.0512134E7](https://img.pdfslide.net/doc/110x75/5b47d83b7f8b9af5078c58b1/xls-web-view10-20512134e7-40-20-20512134e7-40-30-20512134e7-40-40.jpg)