Embed Size (px)
Citation preview

08/07/57
1
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction
525305 กลศาสตรเครองจกรกล (Mechanics of Machinery)
วชาบงคบกอน: 525203 พลศาสตรวศวกรรม
- ความรความเขาใจพนฐานและการทางานของกลไกแบบตางๆ - วเคราะห การกระจด ความเรวและความเรงในเครองจกรกล - การสงเคราะหชนสวนกลไก การวเคราะหแรงสถตและแรงทางพลศาสตรทเกดขน - การถวงสมดลมวลและมวลเคลอนทกลบไปมา - เฟองและขบวนเฟองตางๆ
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionตารา Mechanisms and Dynamics of Machinery / Hamilton H. Mabie and Charles F. Reinholtzหรอฉบบแปล กลไกและพลศาสตรของเครองจกรกล / รศ.วฒชย กปลกาญจน สานกพมพ ฟสกสเซนเตอร
หนงสออานประกอบ1) Design of machinery / Robert L. Norton2) Kinematics and Dynamics of Machinery / Charles E. Wilson and
J. Peter Sadler

08/07/57
2
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionการเกบคะแนน
1. ทดสอบยอย 10% (ประมาณ 4 ครง)2. การบาน ความสนใจและงานมอบหมาย 10%3. สอบกลางภาค 35%4. สอบปลายภาค 45%
- เวลาเรยนนอยกวา 80% นาไปหกจากคะแนนทดสอบยอย การบาน ความสนใจและงานมอบหมาย (20%) ตามจานวนครงตงแตทขาดเกน 4 ครงเปนตนไป โดยจะยดคนทขาดมากทสดเปนเกณฑ 0 คะแนน แลวลดหลนไป- กรณมความจาเปนใหลาลวงหนาพรอมเอกสารแนบ หรอปวยใชใบรบรองแพทย
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionการประเมนผล
คะแนน เกรด >= 80 A
75 – 79 B+70 – 74 B65 – 69 C+60 – 64 C55 – 64 D+50 – 54 D
< 50 F

08/07/57
3
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionกรอบการจดการเรยนการสอน
สปดาหท เนอหา 1 - Introduction
2 - Linkages and Mechanisms- Cams
3 - Spur Gears 4 - Bevel, Helical and Worm Gearing5 - Gear Trains6 - Velocity and Acceleration Analysis I
7 สอบกลางภาค
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionกรอบการจดการเรยนการสอน
สปดาหท เนอหา8 - Velocity and Acceleration Analysis II9 - Force Analysis of Machinery I
10 - Force Analysis of Machinery II11 - Balance of Machinery12 - Kinematic Synthesis Problems

08/07/57
4
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionเกยวกบผสอน
ดร.กระว ตรอานรรค หองพก MT10
สาขาวศวกรรมเครองกล อเมล [email protected]
facebook www.facebook.com/กระว ตรอานรรค การเขาพบ - เชคตารางสอน พบไดตามเวลาทวาง - นดหมายทาง facebook, E mail
- เหนไฟในหองพกเปดอยและไมมแขก เขาพบไดเลย
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionขอตกลงอนๆ
- การเขาชนเรยนสาย นาท- ขอตกลงระหวางเรยน 1.
2.3.
- รปแบบการเชคชอ -
- การสงงาน -

08/07/57
5
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction1.1 บทนา
- การศกษา กลไก (mechanisms) เปนเรองสาคญมาก เพราะถกใชในการออกแบบเครองมอ, ระบบควบคมอตโนมต และอปกรณททางานไดดวยตวเองมากมาย- กลไก นบเปนสวนหนงของ การออกแบบเครองจกรกล (machine design) โดยถกเนนไปท ชนตอโยง (linkages) ลกเบยว (cams) เฟอง (gears) และ กระบวนเฟอง (gear trains)
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction
- กลไกทเหนนคอ Slider-crank โดย link 1 คอ frame ตดตาย, link 2 คอ crank, link 3 connecting rod, link 4 คอ slider- เปนกลไกทใชมากในเครองยนตสนดาปภายใน
08/07/57
6
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
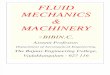
1. Introduction- การ analyze ทาไดยากเพราะมความสลบซบซอน- เราใช kinematic diagram แทนซงดไดงายกวา
วดโอเครองยนต 4 จงหวะ
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
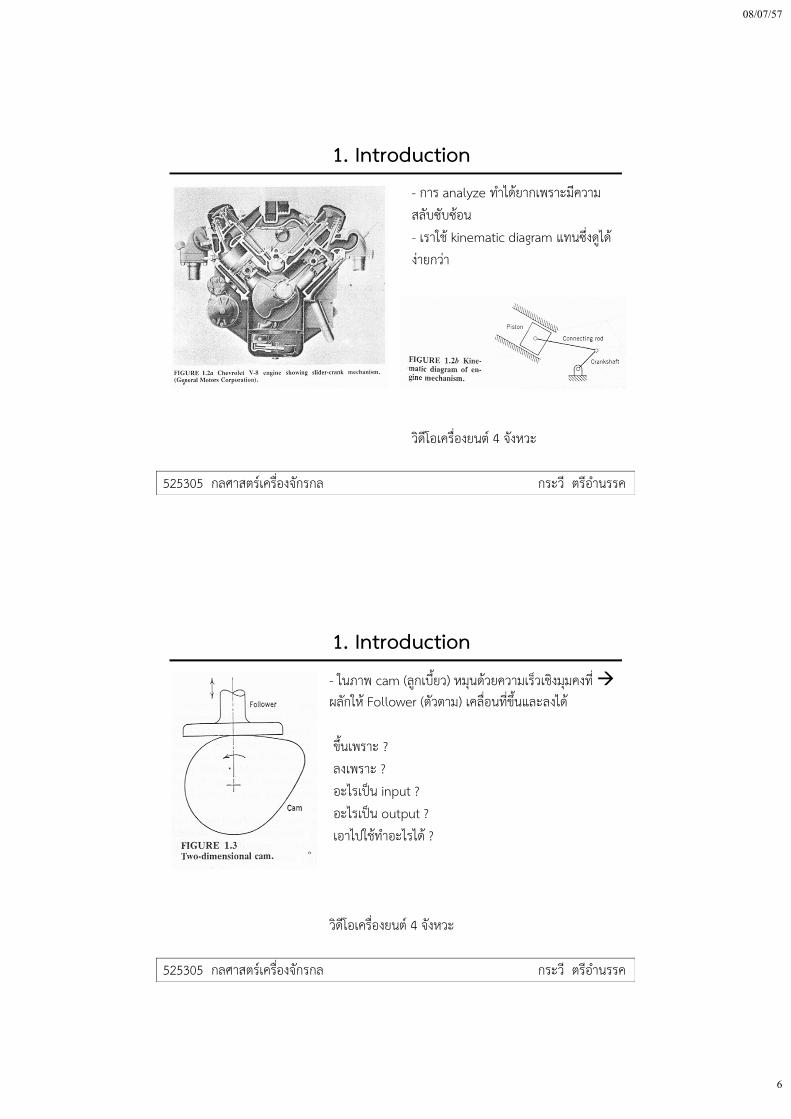
1. Introduction- ในภาพ cam (ลกเบยว) หมนดวยความเรวเชงมมคงท �ผลกให Follower (ตวตาม) เคลอนทขนและลงได
ขนเพราะ ?ลงเพราะ ? อะไรเปน input ?อะไรเปน output ?เอาไปใชทาอะไรได ?
วดโอเครองยนต 4 จงหวะ

08/07/57
7
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction- กรณตองการออกแบบให ระบบรบ input มากกวา 1 ตว เราใช cam เปน 3 มตเลย
อะไรเปน input บางอะไรเปน output บาง
- เราประยกตใชเปน summing point รวมสญญาณ input 2 ตวทางกล ไดใน automatic control
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction- สวนกลไกทพบมากทสดในแทบทกเครองจกร คอ เฟองแบบตางๆ ดงภาพ
ใชเพออะไร ?
แบบไหนเกดการขดสมากๆ บาง ?
08/07/57
8
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
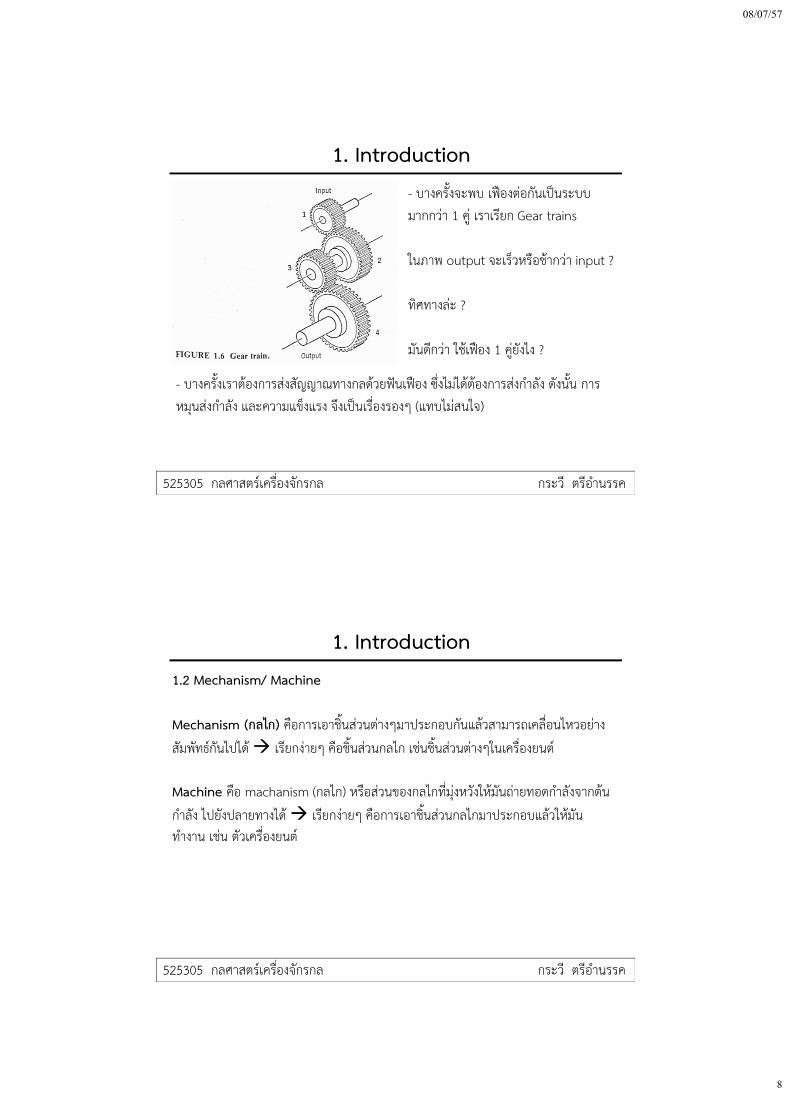
1. Introduction- บางครงจะพบ เฟองตอกนเปนระบบมากกวา 1 ค เราเรยก Gear trains
ในภาพ output จะเรวหรอชากวา input ?
ทศทางละ ?
มนดกวา ใชเฟอง 1 คยงไง ?
- บางครงเราตองการสงสญญาณทางกลดวยฟนเฟอง ซงไมไดตองการสงกาลง ดงนน การหมนสงกาลง และความแขงแรง จงเปนเรองรองๆ (แทบไมสนใจ)
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction1.2 Mechanism/ Machine
Mechanism (กลไก) คอการเอาชนสวนตางๆมาประกอบกนแลวสามารถเคลอนไหวอยางสมพทธกนไปได � เรยกงายๆ คอชนสวนกลไก เชนชนสวนตางๆในเครองยนต
Machine คอ machanism (กลไก) หรอสวนของกลไกทมงหวงใหมนถายทอดกาลงจากตนกาลง ไปยงปลายทางได � เรยกงายๆ คอการเอาชนสวนกลไกมาประกอบแลวใหมนทางาน เชน ตวเครองยนต

08/07/57
9
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction1.3 Motion เปนการระบนยามเพอใชในบทตอๆไป motion (การเคลอนท) แบงออกเปน
1. Plan Motion การเลอนไปบนระนาบ1.1 Translation คอการเคลอนทนนมระนาบขนานทคงทอย 1 ระนาบ (การเลอน)
- Rectilinear translation � เลอนเปนเสนตรง
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction- Curvilinear translation � เลอนเปนเสนโคง
08/07/57
10
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
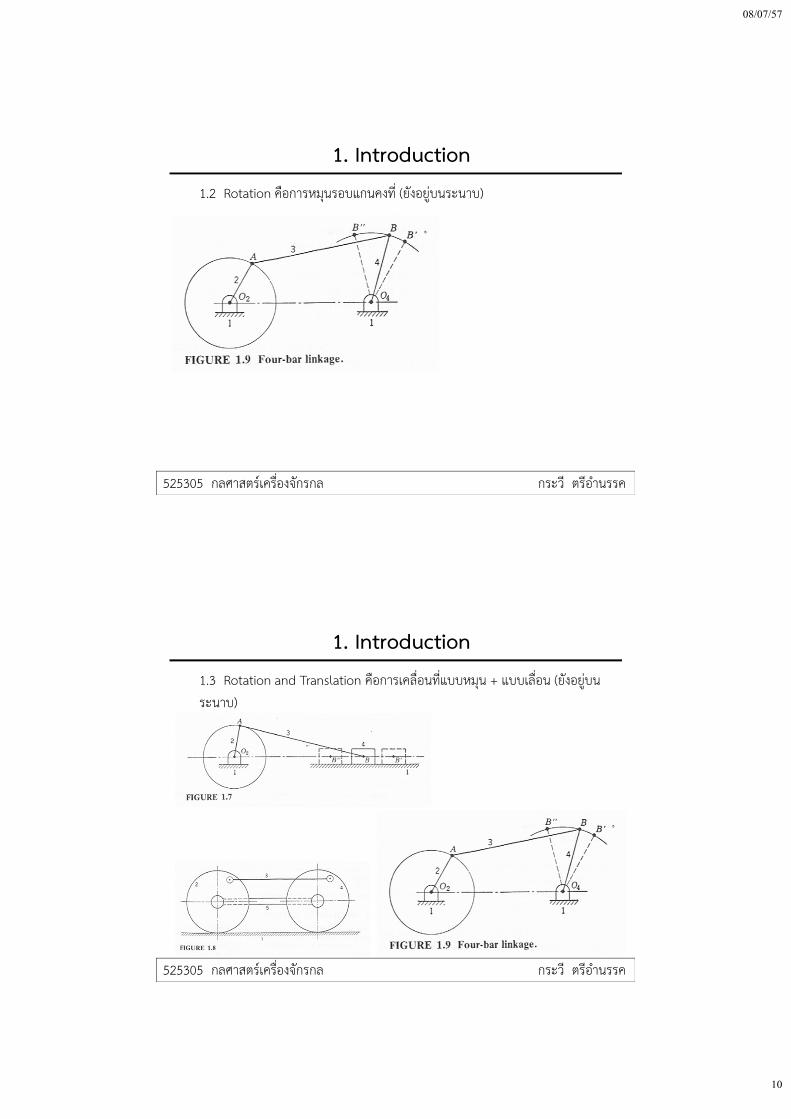
1. Introduction1.2 Rotation คอการหมนรอบแกนคงท (ยงอยบนระนาบ)
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction1.3 Rotation and Translation คอการเคลอนทแบบหมน + แบบเลอน (ยงอยบนระนาบ)

08/07/57
11
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction2. Helical Motion คอชนสวนหมนรอบแกนคงทแกนหนง พรอมกบเคลอนทแบบเลอน
ขนานไปกบแกนนน เชน Nut (นอตตวเมย) ทขนใหหมนไปบน Bolt (นอตตวผ)
3. Spherical Motion คอชนสวนหมนรอบจดคงทจดหนงแบบ 3 มต เชน อเลคตรอนหมนรอบนวเคลยส
4. Spatial Motion คอชนสวนหมนใน 3 มต โดยไมขนานกบแกนใดเลย และมทศทางอสระใน 3 มต
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction1.4 Cycle, Period and Phase of Motion การทชนสวนเคลอนทนบจากตาแหนงเรมตนไปดวยรปแบบทออกแบบไวแลวกลบมาผานตาแหนงท set ไวได - Cycle คอ รปแบบดงกลาว 1 รอบ - Period คอ เวลาทชนสวนนนใชไปใน 1 Cycle
- Phase คอ หากรปแบบการเคลอนท ซาเหมอนเดม ตาแหนงใดๆบนเสน ทางการเคลอนท ทกลบมาซาเดมได คอ Phase (เชนตาแหนงใดๆ บน คลน sine ทสนใจและเกดซา)

08/07/57
12
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction1.5 Pairing Elements คอการทชนสวน 2 ชนทสมผสกนเพอทางานตามทออกแบบ โดย
- หากเปนพวกจดหมน เราเรยก Lower pair เชนพวก pin joint
- หากเปนการเลอนเชน ลกสบเลอนอยในกระบอก เราเรยก Sliding pair เชน slider ใน slider crank
- หากเปนการสมผสแบบกด หรอดน เราเรยก higher pair เชน พวก ฟนเฟองขบกน หรอ cam + follower
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction1.6 Link, Chain
- Link คอชนสวนนนแหละ ดงรปซาย หากเชอมตอแลวขยบไมได เรยก locked chain (หรอกลายเปน structure) หากเชอมตอแลวขยบไดเรยก Chain
รปนคอ bell crank (คานหรอ กระเดอง นยมใชเพราะให grain หรอ อาจมจดเชอมตอไดมากๆ อตราสวน (ratio) ในการขยายสญญาณด
08/07/57
13
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
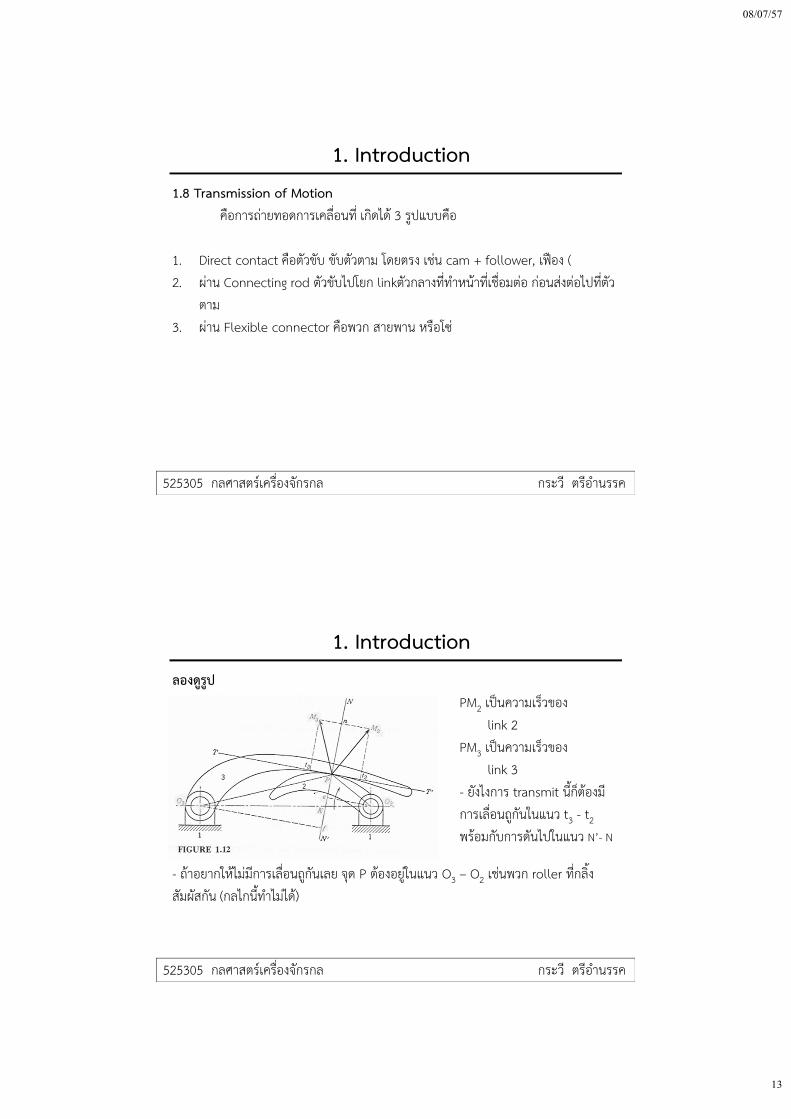
1. Introduction1.8 Transmission of Motion
คอการถายทอดการเคลอนท เกดได 3 รปแบบคอ
1. Direct contact คอตวขบ ขบตวตาม โดยตรง เชน cam + follower, เฟอง (2. ผาน Connecting rod ตวขบไปโยก linkตวกลางททาหนาทเชอมตอ กอนสงตอไปทตว
ตาม3. ผาน Flexible connector คอพวก สายพาน หรอโซ
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionลองดรป PM2 เปนความเรวของ
link 2PM3 เปนความเรวของ link 3- ยงไงการ transmit นกตองมการเลอนถกนในแนว t3 - t2 พรอมกบการดนไปในแนว N’- N
- ถาอยากใหไมมการเลอนถกนเลย จด P ตองอยในแนว O3 – O2 เชนพวก roller ทกลงสมผสกน (กลไกนทาไมได)

08/07/57
14
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionการคานวณ- ใชสมการ ω = v/r ไลไปทละตว
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionลองดรปการถายทอดการเคลอนทดวย flexible connector
08/07/57
15
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
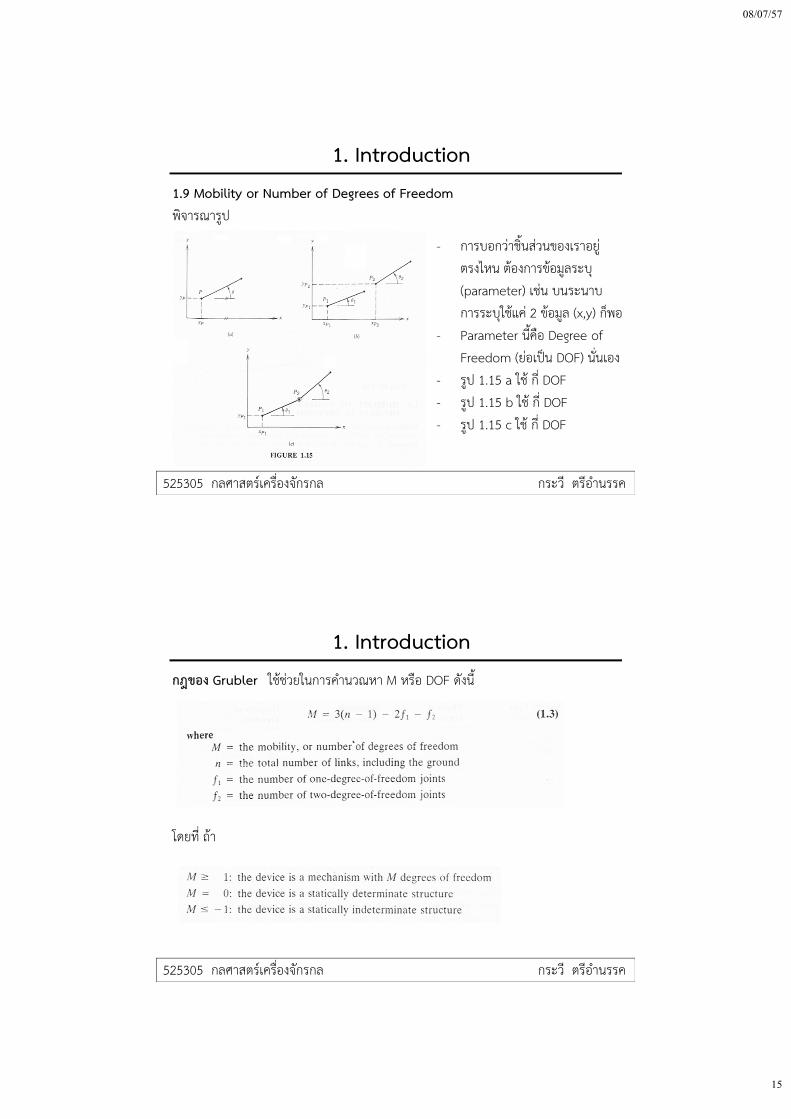
1. Introduction1.9 Mobility or Number of Degrees of Freedomพจารณารป
- การบอกวาชนสวนของเราอยตรงไหน ตองการขอมลระบ (parameter) เชน บนระนาบ การระบใชแค 2 ขอมล (x,y) กพอ
- Parameter นคอ Degree of Freedom (ยอเปน DOF) นนเอง
- รป 1.15 a ใช ก DOF- รป 1.15 b ใช ก DOF- รป 1.15 c ใช ก DOF
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
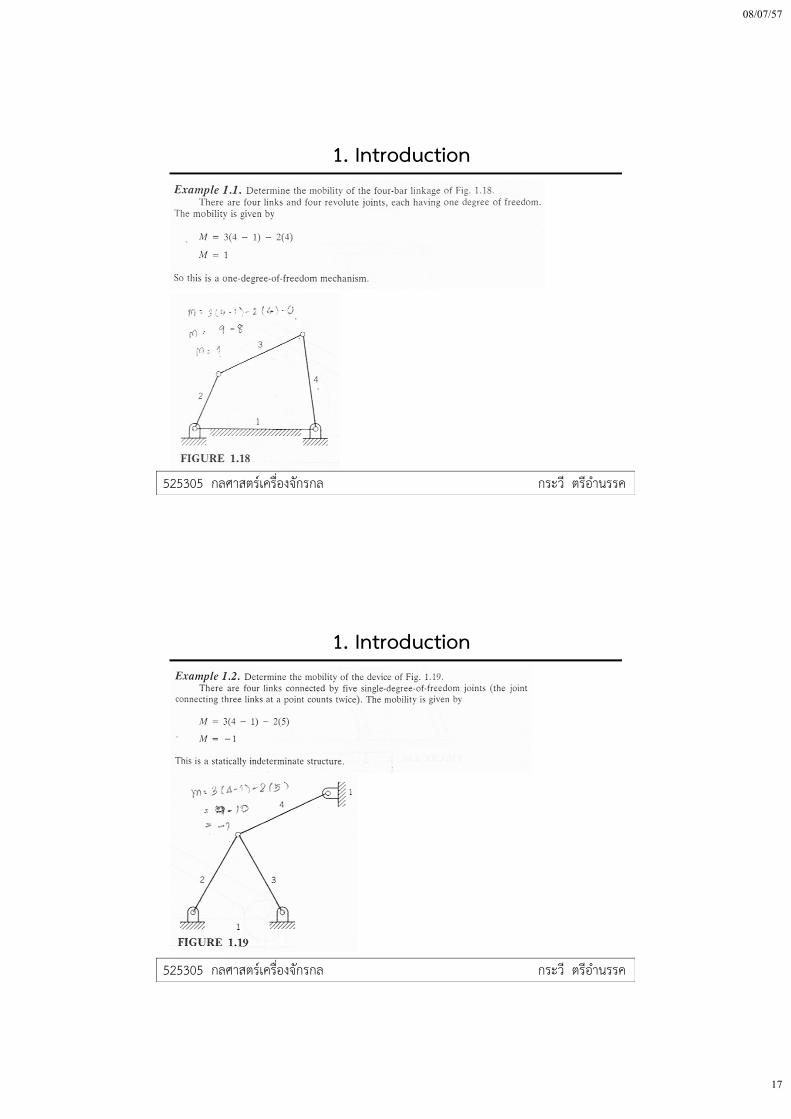
1. Introductionกฎของ Grubler ใชชวยในการคานวณหา M หรอ DOF ดงน
โดยท ถา

08/07/57
16
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introductionลองใช Grubber’s law กบรป 1.16 ด
พบวาไมนาจะถกเพราะ กลไกยงขยบได (ถา M = 0 คอขยบไมได) และนาจะใชแค M = 1
- ดงนนบางกลไกจงมขอยกเวนในการใช กฎของ Grubber กรณรป 1.16 ใหนบ link ตวนอน เปนแค 2 (นบเปน k-1 ไมใช k) แมจะม 3 joint ทเปน one degree of freedom joint กตาม
- ลองคานวณใหม
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction- ในตาราง figure 1.17 คอชนสวนทเจอบอยๆในกลไกททางานแค 1 ระนาบ และจานวน DOF ของมน-
08/07/57
17
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction

08/07/57
18
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. IntroductionHome work

08/07/57
19
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction

08/07/57
20
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction

08/07/57
21
525305 กลศาสตรเครองจกรกล กระว ตรอานรรค
1. Introduction
จบบท
อยาลมทบทวนและทาแบบฝกหด