Embed Size (px)
Citation preview

6 Kinematics of planar rigid bodies
v
R
x
y
A
B C2R
Rolling without slipping
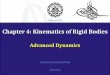
6.1 The piston A has constant velocity of mag-nitude v in the horizontal direction to the right, asindicated in the figure. A wheel, which is connectedto the piston by the rigid rod AB, rolls withoutslipping on a flat plane.
1. Determine the velocity of the center of thewheel C for the position shown in the sketch.
(a ) vC =√3R
−√3+1
vex.
(b ) vC = vex + vey.
(c ) vC =√3√
3+1vex.
(d ) vC = 1−√3+3
vex.
(e ) vC = vex.
2. Determine the acceleration of the center of the wheel C for the position shown inthe sketch.
(a ) aC = − 3√3+4
(√3+1)3
v2
Rex.
(b ) aC = 3√3+4
(√3+1)3
v2
Rex + 3
√3−1
(√3+1)3
v2
Rey.
(c ) aC = −√3−1
(√3+1)3
v2
R2 ex.
(d ) aC =√3−1
(√3+1)3
v2
Rex.
(e ) aC = v2
Rex.
Solution
Let the x axis be horizontal to the right and the y axis be vertical and upward; theaxes are denoted by the unit vectors ex and ey, respectively. The angular velocity vectorof each body is perpendicular to the plane and directed as ez, with unknown magnitudes.To find the acceleration and velocity of center C at a given instant, we first derive anexpression that describes its position in the x direction with respect to the [x y] frame.Subsequently, we take the first and second derivatives of the position with respect to timeto calculate the velocity and acceleration, respectively. Note that the center of the wheeldoes not have any motion in the y direction.
We use three variables, namely x, α, and θ to describe the position of the wheel in exdirection. Later, we account for the fact that these variables are related by two constraints.
6-1

6 Kinematics of planar rigid bodies 6-2
v
R
x
y
A
BC
2R
↵
✓
Rolling without slipping
Figure 6.1:
This implies that the system has 1 degree of freedom, which can be also understood byinspection. The instantaneous position of center C in the ex direction is
xC = xA + xAB + xBC = x+ 2R cosα +R cos θ (6.1)
where xAB and xBC indicate the x component of the position of points B and C relativeto points A and B, respectively.The wheel rolls without slipping, therefore it holds that
vC = vCex; vC = xC = Rθ. (6.2)
Moreover, the position of the center C in the y direction can be described as
yC = 2R sinα−R sin θ = R. (6.3)
Eqs.(6.2) and (6.3) are the two constraints applied to the system.Next, we differentiate (6.1) to obtain an expression for the velocity of the center C as
xC = x− 2Rα sinα−Rθ sin θ. (6.4)
The constraint equations (6.3) and (6.3) must hold for all time. Hence, also their timederivative must hold. By differentiating eq. (6.3) we obtain
yC = 2Rα cosα−Rθ cos θ = 0, (6.5)
which can be used to obtain an expression for α, as
α =cos θθ
2 cosα=
cos θ
2R cosαxC . (6.6)
Substituting Eqs. (6.2) and (6.6) into (6.4) gives the velocity of the center C:
xC = x− xCcos θ sinα
cosα− xC sin θ ⇒ (1 + sin θ + cos θ tanα)xC = x (6.7)
where x = v. The values of θ and α for the position shown in Fig. 6.1 can be calculatedeasily from the geometry of the problem
θ0 = 0; α0 =π
6. (6.8)

6 Kinematics of planar rigid bodies 6-3
Substituting θ0 and α0 into (6.7) yields the velocity of the center C at the given positionas
vC |θ0,α0 =
√3√
3 + 1xex =
√3√
3 + 1vex, (6.9)
To obtain the acceleration, we differentiate eq. (6.7) as
(θ cos θ + θ sin θ tanα +α
cos2 αcos θ)xC + (1 + sin θ + cos θ tanα)xC = 0. (6.10)
The acceleration at the given position is obtained by fixing θ0 and α0 to the correspondingvalues, which can be computed from eqs. (6.2), (6.5) and (6.7) as
θ0 =
√3√
3 + 1
v
R; α0 =
1√3 + 1
v
R; (6.11)
By substituting θ0, α0, θ0, and α0 into (6.10) we obtain
aC |θ0,α0,θ0,α0= − 3
√3 + 4
(√
3 + 1)3v2
Rex. (6.12)
Analysis of multiple choice
1. (a ) This option is dimensionally incorrect.
(b ) Looking at the constraints (pure rolling of the disc), the velocity of the centreis constrained to be along the x direction. No component in the y directionmust be present.
(c ) Correct.
(d ) Incorrect.
(e ) This option contradict the assumption of pure rolling. Indeed if vC = v, it canbe intuitively seen that the whole system is translating with velocity v i.e. thevelocity of bottom most point on the disc is also v. This would mean that thedisc is not rolling, but slipping.
2. (a ) Correct.
(b ) Since the centre of the disc is constrained to move in the x direction, thevelocity of the center in the y direction is identically zero for all times. Thusit cannot have any acceleration in y direction.
(c ) Dimensionally incorrect.
(d ) Incorrect.
(e ) Incorrect.

6 Kinematics of planar rigid bodies 6-4
x
S
R
P
P
aS
aR
aP
aP
!S
!P
+
!P
y
A
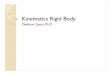
6.2 Consider the planetary gear system sketchedin the figure. The sun, planet and ring gears haveradii aS, aP , aR, respectively. The bar A connectsthe centers of the two planet gears. The ring is fixed.The sun gear is rotating at angular velocity ωS. Whatis the ratio ωP
ωAbetween the angular velocities of the
planet gears and the bar? The positive direction forthe rotation is indicated in the sketch.
(a )ωPωA
= 2
(b )ωPωA
= −1
(c )ωPωA
= − aPaP + aS
(d )ωPωA
= −aP + aSaP
(e )ωPωA
=2aP
aP + aS
Solution We refer to the configuration shown in the figure. In this case, the positionvectors of the contact points between the gears have only a non-zero component in the ydirection. This significantly simplify the calculation. However, note that the problem canbe solved by following the same procedure here described also if the system is consideredin an arbitrary, rotated configuration. This problem can be easily solved by applying
x
ySun
Planet
D
C
B
vD
vC
vB
F
Figure 6.2:the velocity transfer formula to compute the velocity of the contact points between the

6 Kinematics of planar rigid bodies 6-5
various gears, and then imposing the rolling without slipping conditions. The velocity ofpoint B with respect to point D is given by
vB = vD + ωP × rDB , (6.13)
while the velocity of point D belonging to the sun gear is given by
vD = ωS × rFD , (6.14)
since vF = 0. Furthermore, since the ring R is fixed, vB = 0. Inserting (6.14) in 6.13 weobtain
0 = ωS × rFD + ωP × rDB , (6.15)
which can be written in [x y] components as
0 = ωSez × rFDey + ωP ez × rDBey ,
⇒= −ωSaSex − 2ωPaP ex . (6.16)
Solving (6.16) for ωP we get
ωP = −ωS · aS2aP
. (6.17)
similarly, the velocity of point C with respect to point B is given by
vC = 0 + ωP × rBC . (6.18)
Since point C also belong to the bar A, it must hold that
vC = ωA × rFC , (6.19)
where rFC is the position vector in the x − y plane which points from the center of theshaft F to the center C of the upper planet gear P . By equating (6.18) and (6.19) andsolving for ωA, we finally obtain
ωAωP
= − aPaP + aS
. (6.20)
Analysis of multiple choice
(a ) The planet gear and the bar should be rotating in opposite directions (their ratioshould be negative) and thus this option can be eliminated. Indeed if the sun gearrotates in anticlockwise direction, then the planet gear has to rotate in clockwisedirection about its own axis. But since the ring gear is stationary, the planet gearshould then revolve around the sun gear in anticlockwise direction. This would meanthat the bar (which is hinged to the planet gear at its center) would also rotate inanticlockwise direction.

6 Kinematics of planar rigid bodies 6-6
(b ) For a general system with arbitrary values of aP , aS, we do not expect that theangular velocity ratio be independent of aP , aS. Indeed consider the case whenaP � aS This implies thatplanet gear should spin very fast over the sun gear.However, the bar is not expected to spin as fast. Thus the ratio cannot be 1 indeed.
(c ) Incorrect.
(d ) Correct.
(e ) This option can be eliminated on the same grounds as Option 1.

6 Kinematics of planar rigid bodies 6-7
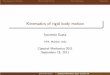
6.3 A ring of radius R is hinged at point O and isfree to swing about it. A disk of radius r rolls with-out slipping inside the ring, as shown. Determine theangular velocity of the disk ωdisk in terms of the gen-eralized coordinates θ and ϕ.
(a ) ωdisk =[θ +
(1 + R
r
)ϕ]k.
(b ) ωdisk =[θ + ϕ
]ez.
(c ) ωdisk =[θ +
(1− R
r
)ϕ]ez.
(d ) ωdisk =[θ + rϕ
]ez.
(e ) ωdisk =[θ − R
rϕ]ez.
Solution As discussed in the lecture, the angular velocity enjoys the additive property.In other words, the angular velocity of a given body is given by the sum of the angularvelocities associated to elementary rotations. In this specific case, the angular velocity ofthe disk is given by the angular velocity associated to the rotation of the ring about O,and the angular velocity related to the rolling without slipping of the disk on the ring.
Clearly, by comparing the orientations of OA and OA′, the angular velocity of the ring isgiven by
ωring = θez . (6.21)
In order to determine the angular velocity of the disk, we need to draw the system in anarbitrary, displaced configuration

6 Kinematics of planar rigid bodies 6-8
By comparing the orientation of BA and B′A′, the angular velocity of the disk is givenby
ωdisk = [θ + ϕ− ψ]ez . (6.22)
where we introduced the angle Ψ to indicate the rolling of the disk on the ring. Theexpression above shows that the angular velocity of the ring is given by three contributions,namely 1. the angular velocity of the ring, 2. the angular velocity due to the rotationabout the center of the ring, and 3. the angular velocity due to rolling without slippingin the ring. Since the disk rolls without slipping, the length of the trajectories of DD′
and AD′ must be equal. This yields the relation
rψ = Rϕ⇒ ψ =R
rϕ (6.23)
By substituting (6.23) into (6.22) we obtain
ωdisk =
[θ +
(1− R
r
)ϕ
]ez . (6.24)
Note that, if we impose θ = 0 (fixed ring) we have the case of a disk rolling on a circularguide. The angular velocity of the disk, in this case, would be given by
ωdisk =
[(1− R
r
)ϕ
]ez. (6.25)
Analysis fo multiple choice
(a ) Consider the case when the ring is fixed, i.e. θ = 0. It is intuitively clear that, if thedisk rotates around its own axis in clockwise direction then the disk centre wouldbe rotating around the ring centre in the anticlockwise direction, and vice versa. Inother words, ωdisk should be opposite in direction to ϕ. According to this answeroption we would obtain a solution contrary to this reasoning.
(b ) The disk angular velocity cannot be expected to be independent of R and r in general.
(c ) Correct.
(d ) Dimensionally incorrect.
(e ) Incorrect.

6 Kinematics of planar rigid bodies 6-9
ex
ey
A
B
LL
L⇡/4
⇡/6
C
vA
D
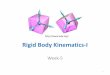
6.4 Three blocks A, B, and C are connected bythe rigid links CD and ADB, as shown. The link CDis free to rotate around point D of link ADB. Denotewith nADB the unit vector along the link ADB. Ifthe block A is moving to the right with a velocity vA,determine
1. the projection v = nADB·(vB−vA) of the velocityof block B relative to block A along the the link ADB.
(a ) v =vA√
2.
(b ) v = vA.
(c ) v = 0.
(d ) v = −vA.
(e ) v = −3vA√
2.
2. the angular velocity ωADB of the link ADB at the instant shown.
(a ) ωADB =vA√2L
clockwise.
(b ) ωADB =vA√2L
anticlockwise.
(c ) ωADB =
√2vAL
clockwise.
(d ) ωADB =
√2vAL
anticlockwise.
(e ) ωADB = vA
√L
2anticlockwise.
3. The velocity magnitude vc of block C at the instant shown.
(a ) vC = vA
√3− 1
2downwards.
(b ) vC =vA2
downwards.
(c ) vC = vA
√3
2upwards.
(d ) vC = vA
√3− 1
2upwards.
(e ) vC =
√3vA2L
upwards.

6 Kinematics of planar rigid bodies 6-10
Solution(a) The relative velocity v of B with respect to A along the rigid link is zero, by definitionof a rigid body.(b) The figure below shows the two links with the velocity of the relevant points A, B, Cand D.
A
BC
D
D
vA
vB
vD
vD
vC
!CD
!ADB
The relevant position vectors between anchor points A, B, C and D arerAB = rABxex + rAByey,rAD = rADxex + rADyey,rCD = rCDxex + rCDyey, while the velocities are given byvA = vAex,vB = vBey,vC = vCey,vD = vDxex + vDyey. The angular velocities of members ADB and CD are indicated byωADB = ωADBez,ωCD = ωCDez, respectively. Similarly to what done in other problems, we use the velocitytransfer formula to relate velocities and angular velocities of relevant points of the system.The velocity of point B with respect to point A is given by
vB = vA + ωADB × rAB , (6.26)
which becomes, when written in components
vBey = vAex + ωADBez × rABxex + rAByey ,
⇒ vBey = vAex + ωADBrABxey − ωADBrAByex . (6.27)
Since B can move only vertically, we need to impose that the ex component is zero. Bysubstituting the known values, we get
ωADB =vArABy
=vA
2L sin(π/4)=
vA√2L
(c) Similarly, we can express the velocity of point Dwith respect to point A as
vD = vA + ωADB × rAD. (6.28)
In components, the previous equation becomes
vDxex + vDyey = vAex + ωADBez × (rADxex + rADyey)

6 Kinematics of planar rigid bodies 6-11
⇒ vDxex + vDyey = vAex + ωADBrADxey − ωADB(rADyex (6.29)
By equating the ex and ey components and substituting the known quantities, we obtain
vDx = vA − ωADBrADy = vA − ωADBL sin(π/4) =vA2
(6.30)
vDy = ωADBrADx = ωADBL cos(π/4) =vA
2 tanπ/4=vA2
(6.31)
In order to find the velocity of point C, we can use again the velocity transfer formula as
vC = vD + ωCD × rCD (6.32)
vCey = vDxex + vDyey + ωCDrCDxey − ωCDrCDyex (6.33)
By equating ex components to zero and substituting the known quantities, we get
ωCD =vDx
rCDy
=vDx
L sin π/6=
vA2L sinπ/6
=vAL
Finally, collecting the ey components and substituting the known quantities, we obtain
vC = vDy + ωCDrCDx = vDy+ ωCD(−L cos(π/6)) = vA
1−√
3
2
Note that vC < 0. This implies that vC is directed downwards.
Analysis of multiple choice
1. This question was already discussed in the solution section.
2. (a ) Since ADB is rigid, it is easy to see that B should move upward (Otherwisethey would have a non zero relative velocity along the rod). This would meanthat the link ADB is rotating in the anticlockwise direction. Hence this optioncan be eliminated.
(b ) Correct.
(c ) Can be eliminated on the same grounds as that of Option 1.
(d ) Incorrect.
(e ) Dimensions not of angular velocity and can be eliminated.
3. (a ) Correct.
(b ) Incorrect.
(c ) It is easy to see that the instantaneous center of rotation of member ADBlies on lines perpendicular to vA and vB and hence also on the perpendicularbisector of ADB (which passes through D). Thus vD would be directed alongthe length ADB at this instant. The component of vD along the member CDwould thus be directed from C to D. Thus the component of vC should alsobe directed along C to D (since CD is rigid). This is only possible if vC isdirected downwards.
(d ) Can be eliminated on the same grounds as that of option 3.
(e ) Dimensions not of velocity and can be eliminated.

6 Kinematics of planar rigid bodies 6-12
6.5 Consider a rigid body with angular velocity ω 6= 0. Which of the followingstatements is true in general about the instantaneous axis of rotation (AIR) of a rigidbody?
(a ) The AIR is a line parallel to ω and all points on this line must have velocities parallelto the line.
(b ) The AIR is a line parallel to ω.
(c ) All points on the AIR must have zero velocities.
(d ) the AIR is a line such that all the points on this line must have velocities perpen-dicular to ω.
(e ) The AIR is a line along which the velocities are parallel to this line and not constantalong the line.
Analysis of multiple choice Recall the definition of instantaneous axis of rotation givenin III.3 of the lecture notes. Then:
(a ) Not true. The AIR is indeed parallel to ω, but the velocities of all the points layingon the line do not necessarily have velocities which are parallel to it.
(b ) True.
(c ) Not true. This is just a special case, but not a general definition.
(d ) Not true, for reasoning analogous to (a).
(e ) Not true. This contradicts the definition on AIR, for which any pair of points A andB belonging to the AIR must have equal velocities.

6 Kinematics of planar rigid bodies 6-13
6.6 Which of the following is not true in general about the instantaneous center ofrotation?
(a ) It is only defined for planar rigid body motions.
(b ) It lies inside the body.
(c ) It is a point around which the body performs pure instantaneous rotation.
(d ) If this point is on the body, it must have zero velocity.
(e ) It may not exist for a given planar rigid body motion.
6.7 Analysis of multiple choice
(a ) This option is correct. Indeed, the center of instantaneous rotation is a point, thatcan only be defined for planar motions, as a consequence of the fact that the angularvelocity features constant orientation.
(b ) Not true. The center of instantaneous rotation might lie outside the body, as it isdefined as the intersection of two lines perpendicular to the velocities of two pointsbelonging to the body.
(c ) True, since the center of instantaneous rotation has zero velocity.
(d ) This is also correct. Note, however, that the center of instantaneous rotation mightlie also outside the body.
(e ) This is true, in case of purely translational motions.