Embed Size (px)
DESCRIPTION
waleyyyy hahahahah
Citation preview

Transfer Function

Zeros and Poles

DefinitionGive a sequence, the set of values of z for
which the z-transform converges, i.e., |X(z)|<, is called the region of convergence.
n
n
n
n znxznxzX |||)(|)(|)(|
ROC is centered on origin and consists of a set of rings.
ROC is centered on origin and consists of a set of rings.

Example: Region of Convergence
Re
Im
n
n
n
n znxznxzX |||)(|)(|)(|
ROC is an annual ring centered on the origin.ROC is an annual ring centered on the origin.
xx RzR ||
r
}|{ xxj RrRrezROC

Stable Systems
A stable system requires that its Fourier transform is uniformly convergent.
Re
Im
1
Fact: Fourier transform is to evaluate z-transform on a unit circle.
A stable system requires the ROC of z-transform to include the unit circle.

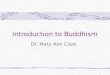
Example: A right sided Sequence
)()( nuanx n
1 2 3 4 5 6 7 8 9 10-1-2-3-4-5-6-7-8
n
x(n)
. . .

Example: A right sided Sequence
)()( nuanx n
n
n
n znuazX
)()(
0n
nnza
0
1)(n
naz
For convergence of X(z), we require that
0
1 ||n
az 1|| 1 az
|||| az
az
z
azazzX
n
n
10
1
1
1)()(
|||| az

aa
Example: A right sided Sequence ROC for x(n)=anu(n)
|||| ,)( azaz
zzX
Re
Im
1aa
Re
Im
1
Which one is stable?Which one is stable?

Example: A left sided Sequence
)1()( nuanx n
1 2 3 4 5 6 7 8 9 10-1-2-3-4-5-6-7-8n
x(n)
. . .

Example: A left sided Sequence
)1()( nuanx n
n
n
n znuazX
)1()(
For convergence of X(z), we require that
0
1 ||n
za 1|| 1 za
|||| az
az
z
zazazX
n
n
10
1
1
11)(1)(
|||| az
n
n
nza
1
n
n
nza
1
n
n
nza
0
1

aa
Example: A left sided Sequence ROC for x(n)=anu( n1)
|||| ,)( azaz
zzX
Re
Im
1aa
Re
Im
1
Which one is stable?Which one is stable?

Region of Convergence

Represent z-transform as a Rational Function
)(
)()(
zQ
zPzX where P(z) and Q(z) are
polynomials in z.
Zeros: The values of z’s such that X(z) = 0
Poles: The values of z’s such that X(z) =

Example: A right sided Sequence
)()( nuanx n |||| ,)( azaz
zzX
Re
Im
a
ROC is bounded by the pole and is the exterior of a circle.

Example: A left sided Sequence
)1()( nuanx n|||| ,)( az
az
zzX
Re
Im
a
ROC is bounded by the pole and is the interior of a circle.

Example: Sum of Two Right Sided Sequences
)()()()()( 31
21 nununx nn
31
21
)(
z
z
z
zzX
Re
Im
1/2
))((
)(2
31
21
121
zz
zz
1/3
1/12
ROC is bounded by poles and is the exterior of a circle.
ROC does not include any pole.

Example: A Two Sided Sequence
)1()()()()( 21
31 nununx nn
21
31
)(
z
z
z
zzX
Re
Im
1/2
))((
)(2
21
31
121
zz
zz
1/3
1/12
ROC is bounded by poles and is a ring.
ROC does not include any pole.

Example: A Finite Sequence
10 ,)( Nnanx n
nN
n
nN
n
n zazazX )()( 11
0
1
0
Re
Im
ROC: 0 < z <
ROC does not include any pole.
1
1
1
)(1
az
az N
az
az
z
NN
N
1
1
N-1 poles
N-1 zeros
Always StableAlways Stable

Properties of ROCA ring or disk in the z-plane centered at the origin.The Fourier Transform of x(n) is converge absolutely iff
the ROC includes the unit circle.The ROC cannot include any polesFinite Duration Sequences: The ROC is the entire z-
plane except possibly z=0 or z=. Right sided sequences: The ROC extends outward from
the outermost finite pole in X(z) to z=. Left sided sequences: The ROC extends inward from the
innermost nonzero pole in X(z) to z=0.

More on Rational z-Transform
Re
Im
a b c
Consider the rational z-transform with the pole pattern:
Find the possible ROC’s
Find the possible ROC’s

More on Rational z-Transform
Re
Im
a b c
Consider the rational z-transform with the pole pattern:
Case 1: A right sided Sequence.

More on Rational z-Transform
Re
Im
a b c
Consider the rational z-transform with the pole pattern:
Case 2: A left sided Sequence.

More on Rational z-Transform
Re
Im
a b c
Consider the rational z-transform with the pole pattern:
Case 3: A two sided Sequence.

More on Rational z-Transform
Re
Im
a b c
Consider the rational z-transform with the pole pattern:
Case 4: Another two sided Sequence.

System Function

Shift-Invariant System
h(n)h(n)
x(n) y(n)=x(n)*h(n)
X(z) Y(z)=X(z)H(z)H(z)

Shift-Invariant System
H(z)H(z)X(z) Y(z)
)(
)()(
zX
zYzH

Nth-Order Difference Equation
M
rr
N
kk rnxbknya
00
)()(
M
r
rr
N
k
kk zbzXzazY
00
)()(
N
k
kk
M
r
rr zazbzH
00)(

Representation in Factored Form
N
kr
M
rr
zd
zcAzH
1
1
1
1
)1(
)1()(
Contributes poles at 0 and zeros at cr
Contributes zeros at 0 and poles at dr

Stable and Causal Systems
N
kr
M
rr
zd
zcAzH
1
1
1
1
)1(
)1()( Re
Im
Causal Systems : ROC extends outward from the outermost pole.

Stable and Causal Systems
N
kr
M
rr
zd
zcAzH
1
1
1
1
)1(
)1()( Re
ImStable Systems : ROC includes the unit circle.
1

ExampleConsider the causal system
characterized by)()1()( nxnayny
11
1)(
azzH
Re
Im
1
a
)()( nuanh n

Determination of Frequency Response from pole-zero pattern
A LTI system is completely characterized by its pole-zero pattern.
))(()(
21
1
pzpz
zzzH
Example:
))(()(
21
1
00
0
0
pepe
zeeH jj
jj
0je
Re
Im
z1
p1
p2

Determination of Frequency Response from pole-zero pattern
A LTI system is completely characterized by its pole-zero pattern.
))(()(
21
1
pzpz
zzzH
Example:
))(()(
21
1
00
0
0
pepe
zeeH jj
jj
0je
Re
Im
z1
p1
p2
|H(ej)|=?|H(ej)|=? H(ej)=?H(ej)=?

Determination of Frequency Response from pole-zero pattern
A LTI system is completely characterized by its pole-zero pattern.Example:
0je
Re
Im
z1
p1
p2
|H(ej)|=?|H(ej)|=? H(ej)=?H(ej)=?
|H(ej)| =| |
| | | | 1
2
3
H(ej) = 1(2+ 3 )

Example
11
1)(
azzH
Re
Im
a
0 2 4 6 8-10
0
10
20
0 2 4 6 8-2
-1
0
1
2d
B