Embed Size (px)
Citation preview
7 Numerical implementation techniques of
finite element methods
283
Contents
1. Modelling principles and boundary value problems in engineering sciences
2. Basics of numerical integration and differentiation
3. Basic 1D finite difference and collocation methods
– bars/rods, heat diffusion, seepage, electrostatics
4. Finite difference methods for two-variable problems
– heat diffusion
5. Energy methods and basic 1D finite element methods
– bars/rods, beams, heat diffusion, seepage, electrostatics
6. Basic 2D and 3D finite element methods
– heat diffusion, seepage
7. Numerical implementation techniques for finite element methods
8. Finite element methods for Euler−Bernoulli beams
9. Finite element methods for 2D and 3D elasticity
10. Algorithmic design in architectural engineering
CIV-E1060
Engineering Computation and Simulation
CIV-E1060 / 2020 / Jarkko Niiranen

284
Contents
1. Element point of view and assembly
2. Reference elements and coordinate transformations
Learning outcome
A. Recognizing the main differences between the global and local frames in FEM
B. Ability to assemble global FEM stiffness matrices from local contributes
C. Ability to derive and apply the basic reference element calculus of FEM
References
Text book 1: Sections 6.4−5, 7.1
Text book 2: Sections 1.12−15, 2.5−6,
3.1−10, A3.I
7 Numerical implementation techniques of
finite element methods
CIV-E1060 / 2017 / Jarkko Niiranen
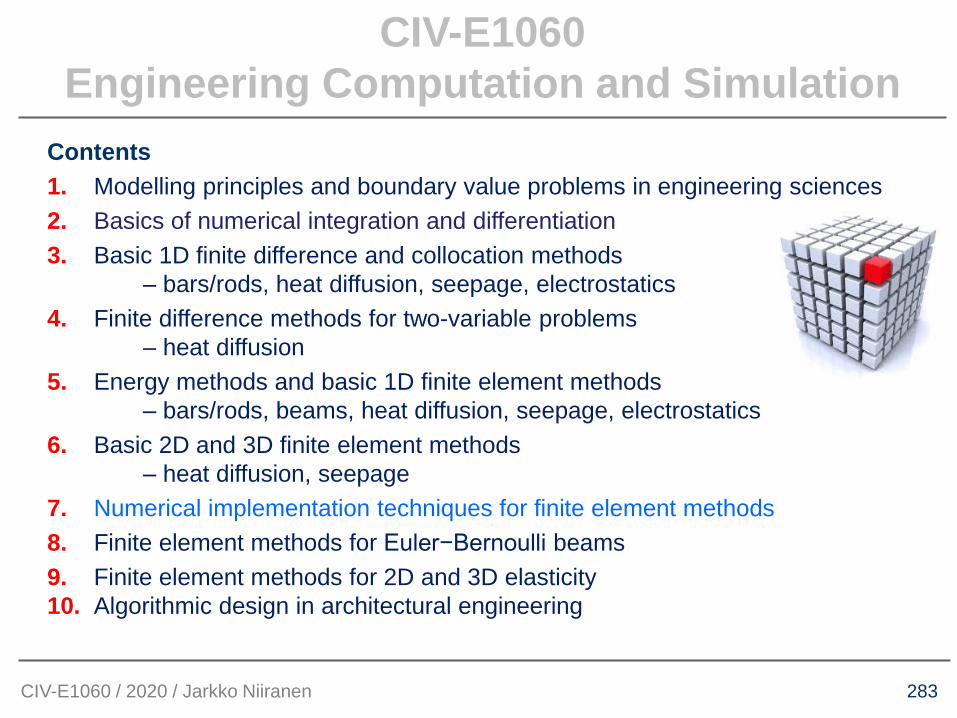
7.0 Programming finite element methods
285
What can you learn from the web pictures found by
using the keywords ”finite element implementation”?
CIV-E1060 / 2016 / Jarkko Niiranen
287
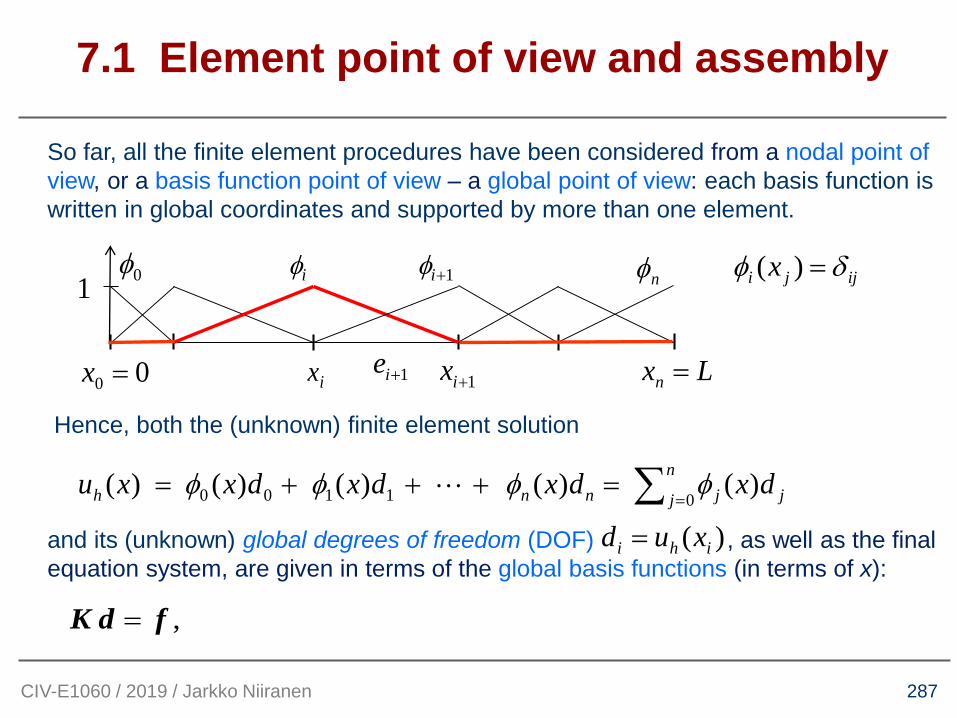
So far, all the finite element procedures have been considered from a nodal point of
view, or a basis function point of view – a global point of view: each basis function is
written in global coordinates and supported by more than one element.
Hence, both the (unknown) finite element solution
and its (unknown) global degrees of freedom (DOF) , as well as the final
equation system, are given in terms of the global basis functions (in terms of x):
j
n
j jnnh dxdxdxdxxu )()()()()(01100 =
=+++=
ijji x =)(
)( ihi xud =
i 1+i
ix 1+ix Lxn =00 =x
01
n
,fdK =
1+ie
7.1 Element point of view and assembly
CIV-E1060 / 2019 / Jarkko Niiranen
289
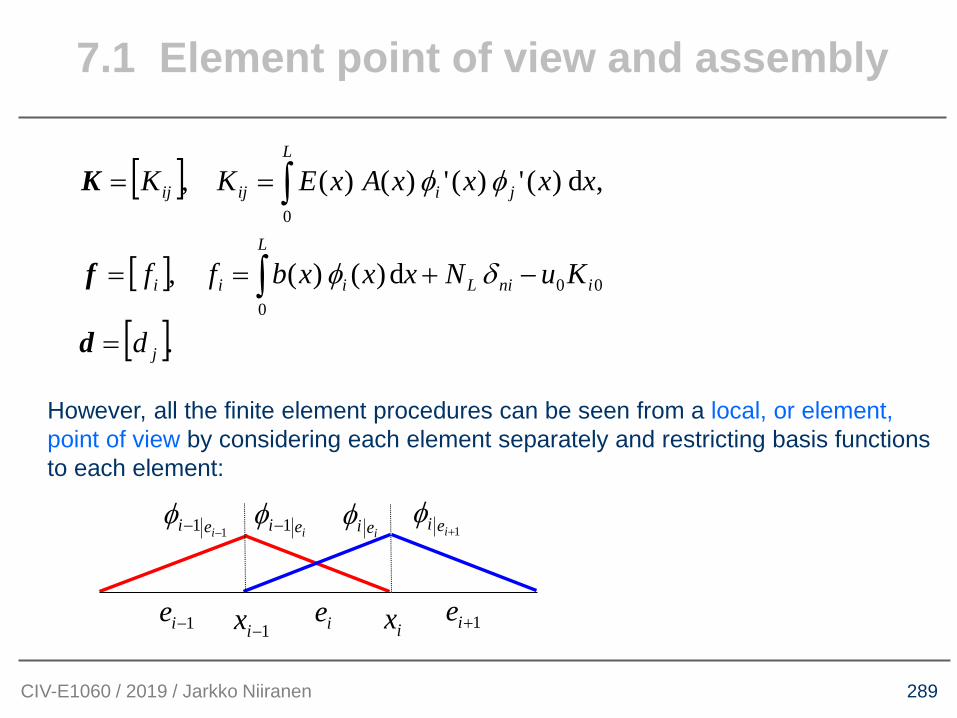
However, all the finite element procedures can be seen from a local, or element,
point of view by considering each element separately and restricting basis functions
to each element:
ie
iei 1−iei
1−ix ix1−ie 1+ie
11
−−
iei 1+iei
.
d)()(,
,d)(')(')()(,
00
0
0
j
iniL
L
iii
L
jiijij
d
KuNxxxbff
xxxxAxEKK
=
−+==
==
d
f
K
7.1 Element point of view and assembly
CIV-E1060 / 2019 / Jarkko Niiranen
291
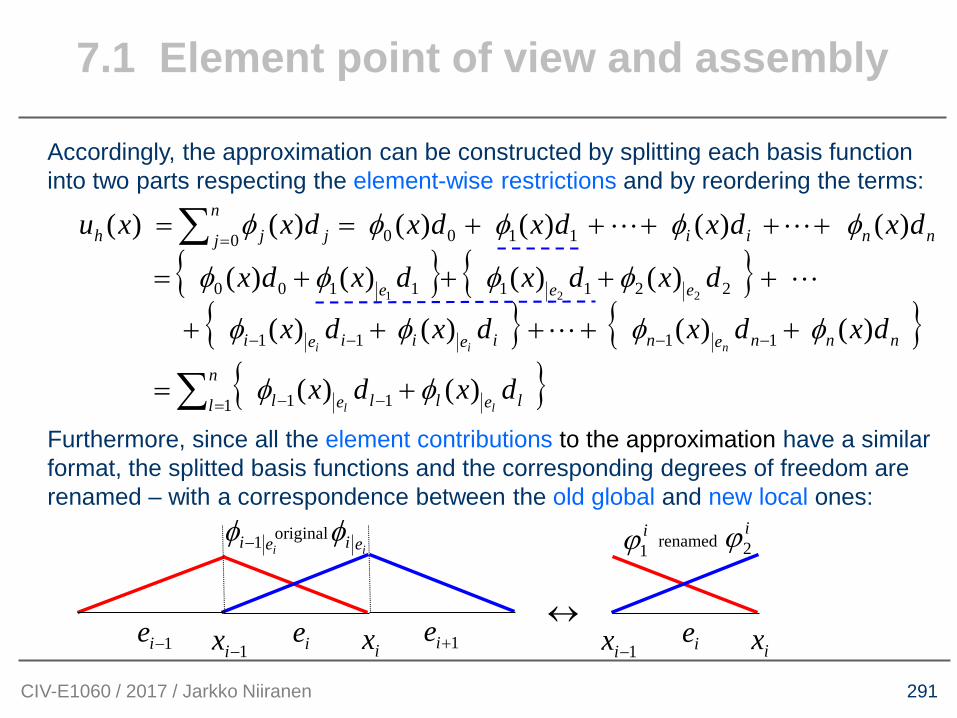
Accordingly, the approximation can be constructed by splitting each basis function
into two parts respecting the element-wise restrictions and by reordering the terms:
Furthermore, since all the element contributions to the approximation have a similar
format, the splitted basis functions and the corresponding degrees of freedom are
renamed – with a correspondence between the old global and new local ones:
ie
i
1i
2
1−ix ix
renamed
ie
iei 1−iei
1−ix ix1−ie 1+ie
original
= −−
−−−−
=
+=
+++++
++++=
+++++==
n
l lellel
nnnenieiiei
eee
nniij
n
j jh
dxdx
dxdxdxdx
dxdxdxdx
dxdxdxdxdxxu
ll
nii
1 11
1111
22111100
11000
)()(
)()()()(
)()()()(
)()()()()()(
221
7.1 Element point of view and assembly
CIV-E1060 / 2017 / Jarkko Niiranen

292
Now, the approximation can be expressed as a sum of element contributions with
local basis functions and local degrees of freedom (properly related to global ones)
In each element, the approximation is hence of the form
llll
eh dxdxxul
2211 )()()( +=
le
l
1l
2
l
l
d
x
1
1−
l
l
d
x
2
renamed
=
= −−
+=
+=
n
l
llll
n
l lellelh
dxdx
dxdxxull
1 2211
1 11
)()(:
)()()(
7.1 Element point of view and assembly
CIV-E1060 / 2016 / Jarkko Niiranen
293
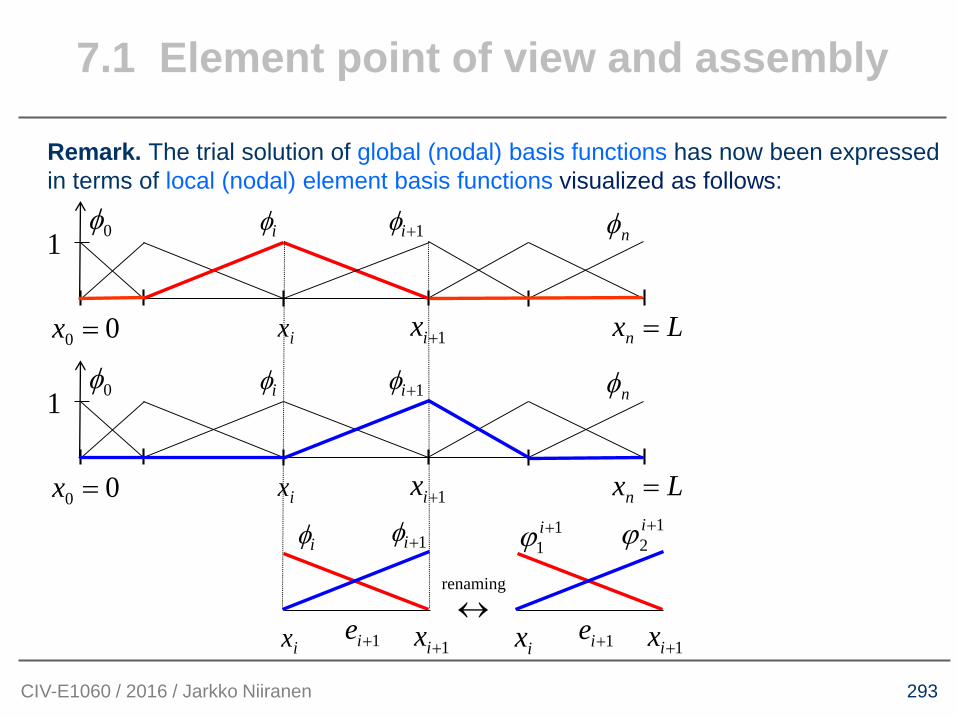
Remark. The trial solution of global (nodal) basis functions has now been expressed
in terms of local (nodal) element basis functions visualized as follows:
i 1+i
ix 1+ix Lxn =00 =x
01
n
i 1+i
ix 1+ix Lxn =00 =x
01
n
1+ie
i 1+i
ix 1+ix 1+ie
1
1
+i1
2
+i
ix 1+ix
renaming
7.1 Element point of view and assembly
CIV-E1060 / 2016 / Jarkko Niiranen

298
Local (form of) stiffness matrix and force vector. A corresponding element-wise
splitting will be accomplished for the fairly local integrals of the stiffness matrix and
force vector entries by expressing them as sums of local integrals over elements.
For the 1D model problem, the discrete energy balance was earlier written in the
following form (weak form with inserted trial and test functions – note constants ci)
First, let us consider the right hand side of the equality, the load integral:
niNxbdxEA
ixbLNxdEA
xbLNxdEAc
xcbcLNxcdEA
niL
L
i
n
j j
L
ij
L
iiL
L
ij
n
j j
n
i
L
iiL
L
ij
n
j ji
L
i
n
i ii
n
i iL
L
i
n
i ij
n
j j
,,0dd''
d)(d''
0}d)(d''{
d)(d''
00 0
00 0
0 00 0
0
00
0
00
=+=
+=
=−−
+=
=
=
= =
====
7.1 Element point of view and assembly
CIV-E1060 / 2019 / Jarkko Niiranen

302
( )
niL
ii
niLe
i
e
i
niL
n
l e
ii
niL
L
ii
Nff
Nxbxb
Nxb
Nxbf
ii
l
++=
++=
++=
+=
+
+
=
+
+
1
12
1
12
1
1
12
0
:
dd
d
d
1
( ) ( )
( ) ( ) ,d''
d''
d')'(d''
0 1
1
12
1
1
1
122
0
0
1
12
1
1
1
122
0 00 00
= =
+++
=
+++
===
++=
++=
=
=
n
j
n
l e
iijjjj
n
j
L
iijjjj
n
j
L
ijj
n
j j
L
ij
n
j jij
l
xddEA
xddEA
xdEAdxEAdK
ie
1−i i
1−ix ix
original
1+ie
ie
i
1i
2
1−ix ix 1+ie
1
1
+i
Second, let us consider the left hand side, the stiffness part:
renamed
7.1 Element point of view and assembly
CIV-E1060 / 2019 / Jarkko Niiranen
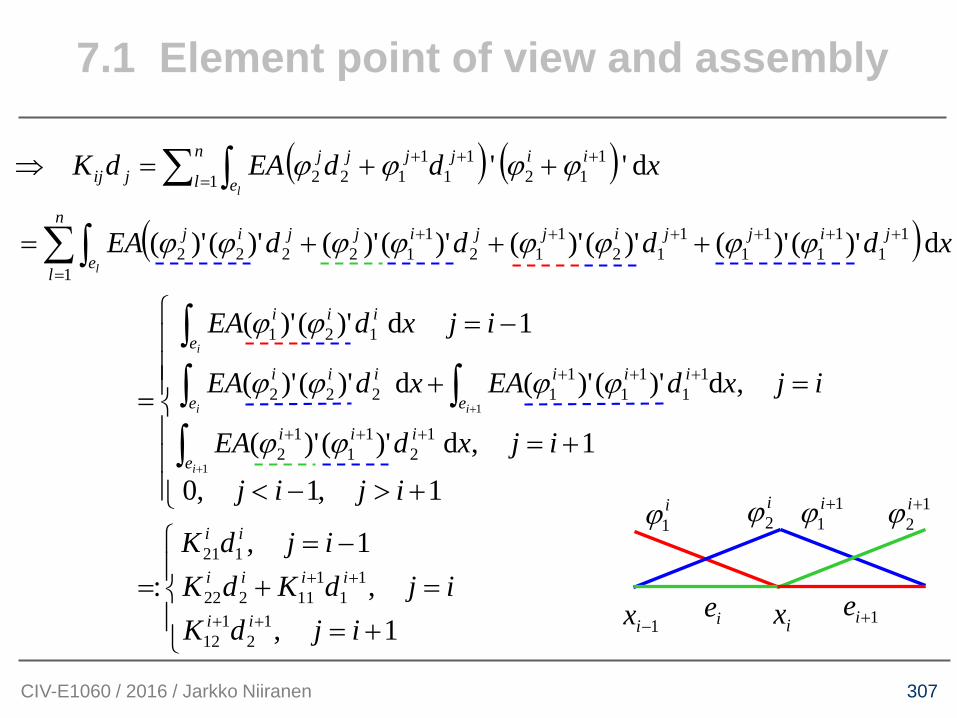
307
( ) ( )
( )
+=
=+
−=
=
+−
+=
=+
−=
=
+++=
++=
++
++
+++
+++
=
++++++
=
+++
+
+
1,
,
1,
:
1,1,0
1,d)'()'(
,d)'()'(d)'()'(
1d)'()'(
d)'()'()'()'()'()'()'()'(
d''
1
2
1
12
1
1
1
11222
121
1
2
1
1
1
2
1
1
1
1
1
1222
121
1
1
1
1
1
1
1
1
12
1
12
1
12222
1
1
12
1
1
1
122
1
1
ijdK
ijdKdK
ijdK
ijij
ijxdEA
ijxdEAxdEA
ijxdEA
xddddEA
xddEAdK
ii
iiii
ii
e
iii
e
iii
e
iii
e
iii
n
le
jijjijjijjij
n
l e
iijjjj
jij
i
ii
i
l
l
ie
i
1i
2
1−ix ix 1+ie
1
1
+i 1
2
+i
7.1 Element point of view and assembly
CIV-E1060 / 2016 / Jarkko Niiranen

309
Altogether, the global stiffness matrix and force vector (corresponding to the global
degrees of freedom vector), can be assembled from the element contributions:
T
L
nnnnniiii
i
nn
nnnn
nnnn
i
iiii
iiii
i
ij
NfffffffffffKufff
KK
KKKK
KKKK
K
KKKK
KKKK
KK
KKKK
KKK
K
++++++−+=
+
+
+
+
+
+
=
−−−+−
−−
−−−−
+
++
−−
−
21
1
2
1
1
2
2
1
121
1
2
3
1
2
2
1
210
2
1
1
2
2221
1211
1
22
1
21
1
12
1
11
2
22
2
21
1
21
1
12
1
112221
1211
1
22
1
21
1
12
3
21
3
12
3
11
2
22
2
21
2
12
2
11
1
22
0000
00
00
000
00
000
00
00
0000
7.1 Element point of view and assembly
CIV-E1060 / 2017 / Jarkko Niiranen
310
Remark. The global system matrix and force vector can now be assembled from
the element contributions
by placing them in proper positions in their global counterparts.
Remark. These specific element contributions are valid in the case of the simplest
possible finite element method: 1D linear basis functions.
Remark. Since one element serves as a support for two basis functions only, no
more than two force vector entries and four stiffness matrix entries correspond to
each element. Furthermore, each element is connected to two global degrees of
freedom only and hence each element has only two local degrees of freedom.
Remark. Accordingly, the band width of the stiffness matrix is three (no more than
three nonzero entries in each row of the matrix) with basic linear 1D elements.
7.1 Element point of view and assembly
CIV-E1060 / 2020 / Jarkko Niiranen
11 12 1
12 22 2
,l l l
l l
l l l
K K f
K K f
= =
K f
311
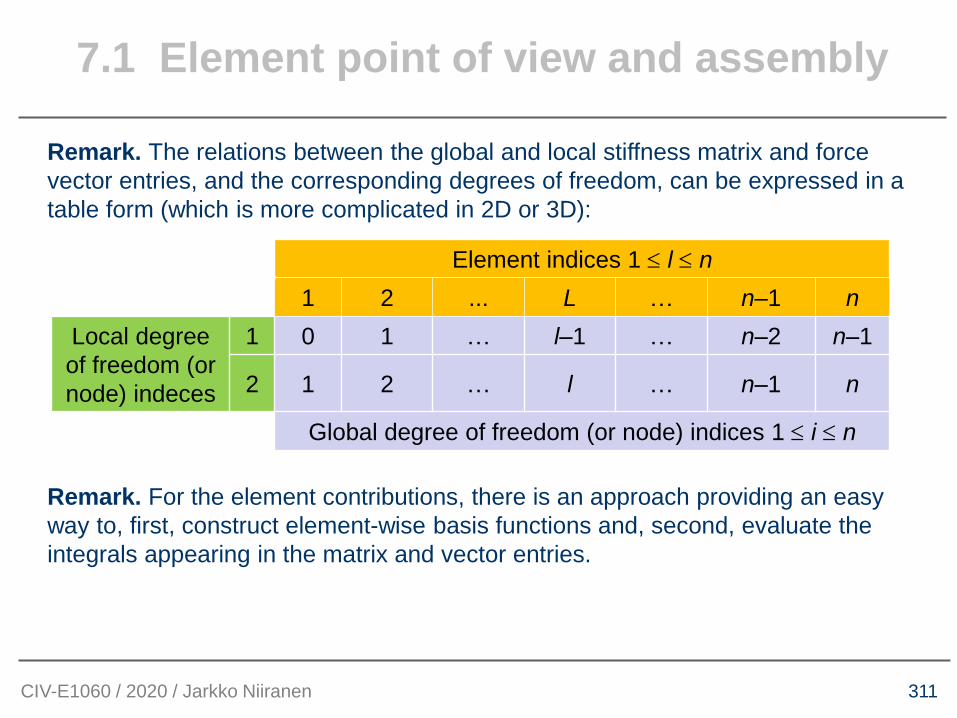
Remark. The relations between the global and local stiffness matrix and force
vector entries, and the corresponding degrees of freedom, can be expressed in a
table form (which is more complicated in 2D or 3D):
Remark. For the element contributions, there is an approach providing an easy
way to, first, construct element-wise basis functions and, second, evaluate the
integrals appearing in the matrix and vector entries.
7.1 Element point of view and assembly
CIV-E1060 / 2020 / Jarkko Niiranen
Element indices 1 l n
1 2 ... L … n–1 n
Local degree
of freedom (or
node) indeces
1 0 1 … l–1 … n–2 n–1
2 1 2 … l … n–1 n
Global degree of freedom (or node) indices 1 i n
312
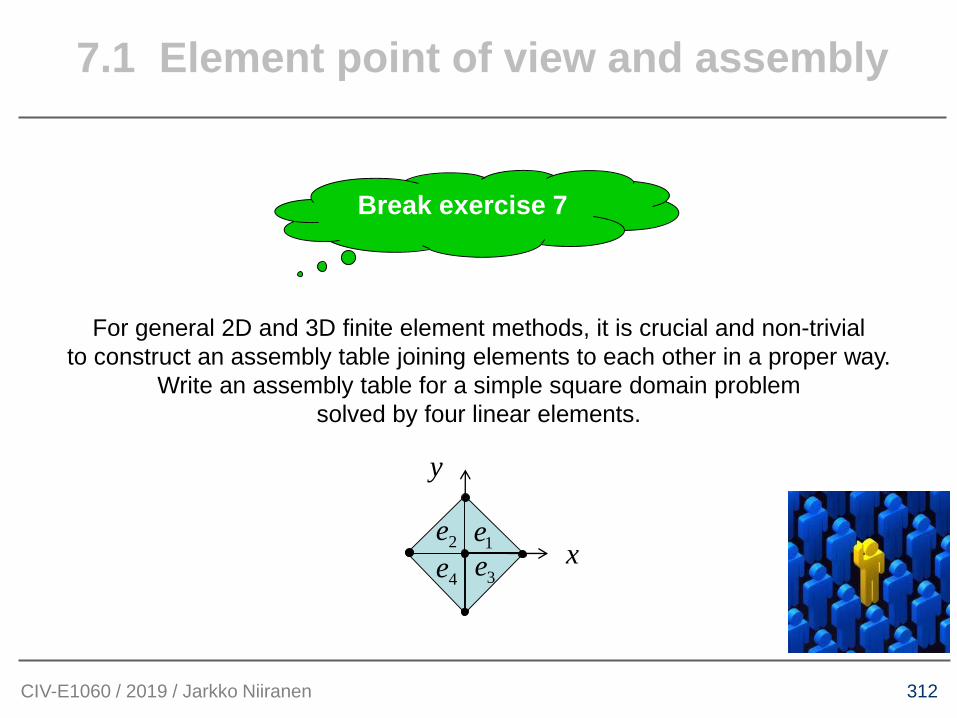
Break exercise 7
For general 2D and 3D finite element methods, it is crucial and non-trivial
to construct an assembly table joining elements to each other in a proper way.
Write an assembly table for a simple square domain problem
solved by four linear elements.
CIV-E1060 / 2019 / Jarkko Niiranen
7.1 Element point of view and assembly
1e2e
3e4e
x
y

314
Finally, the local basis functions above (still functions of the local coordinate x) can
be expressed by using a local reference element with local reference basis functions
(of a local reference element coordinate ) and local degrees of freedom:
For local calculations, one needs to explicitly define the local basis functions (now
linear as the original global ones):
)(:)()(
)()()(
2211
2211
l
h
ll
llll
eh
udNdN
dxdxxul
=+=
+=
CIV-E1060 / 2018 / Jarkko Niiranen
.2/1)('2/)1()(
2/1)('2/)1()(
22
11
=+=
−=−=
NN
NN
ie
1−i i
1−ix ix
1N 2N
1− 1refeie
i
1i
2
1−ix ix
renaming
1−
→ie
ie
F
F
7.2 Reference elements and coordinate
transformations

315
Remark. The trial solution of local (nodal) basis functions is now expressed in terms
of local (nodal) reference element basis functions visualized as follows:
i 1+i
ix 1+ix Lxn =00 =x
01
n
i 1+i
ix 1+ix Lxn =00 =x
01
n
1+ie
i 1+i
ix 1+ix
1N 2N
1− 1refe
1
1
1
−
+
+
→ie
ie
F
F1+ie
1
1
+i1
2
+i
ix 1+ix
renaming
CIV-E1060 / 2016 / Jarkko Niiranen
7.2 Reference elements and coordinate
transformations

316
Remark. The reference element ”serves” all elements:
= =
=
=
= −−
=
=
+=
+=
+=
=
n
l p
l
pp
n
l
ll
n
l
llll
n
l lellel
j
n
j jh
dN
dNdN
dxdx
dxdx
dxxu
ll
1
2
1
1 2211
1 2211
1 11
0
)(
)()(
)()(
)()(
)()(
1+ie
1
1
+i1
2
+i
ix 1+ix
renamed
1+ie
i 1+i
ix 1+ix
original
1N 2N
1− 1refe
reference
ie
iei 1−iei
1−ix ix1−ie 1+ie
original
CIV-E1060 / 2016 / Jarkko Niiranen
7.2 Reference elements and coordinate
transformations

318
Reference element mappings in 1D. Between the reference element (of the local
coordinate ) and the actual element (of the global coordinate x), one needs to
construct an (affine) transformation, or mapping, and its derivative, i.e.,
as well as the inverse as its derivative:
Remark. It is easy to check that the mapping transforms the reference element onto
the actual element, i.e, points are mapped to .
Remark. What is the geometrical meaning of the derivative of the mapping Fe?
11 ,
2)(',
2)(
,:
−− −==++
==
→
iiii
eiii
e
irefe
xxhh
Fxxh
Fx
eeF
ii
i
CIV-E1060 / 2019 / Jarkko Niiranen
)('
12)()'(,
2)(
,:
111
1
i
ii
i
ei
e
i
iie
refie
FhxF
h
xxxxFx
eeF
==−−
==
→
−−−
−
7.2 Reference elements and coordinate
transformations
1,0,1 = − 1 1, ( ) / 2,i i i ix x x x− −+

321
The local element force vector consist of two (2 x 1) entries following the construction
above:
Since all the element contributions to the global force vector have a common format,
it is practical to compute them by utilizing the reference element, by accomplishing a
change of variables in the integration:
2 0 21 1 1
1
2 0 21 1 11
1
01
( ) ( ) d ; 1,2
d( ( )) ( ) d ; ( )
d
1( ( )) (1 ) d , for 0, 0
2 2
b / 2, for constant
l
l i
l
l l l
p p L p nl p le
l
e p L p nl p l e
le L
l
f b x x x N u K p
xb F N N u K x F
hb F N u
h b
−
−
= + − =
= + − =
= = =
=
=
l
l
l
f
f
2
1f
CIV-E1060 / 2016 / Jarkko Niiranen
7.2 Reference elements and coordinate
transformations
324
The local element stiffness matrix consist of four (2 x 2) entries following the
construction above:
Since all the element contributions to the global stiffness have a common format,
they are computed on the reference element (change of variables plus chain rule):
=
ll
ll
l
KK
KK
2212
1211K
−
−−
−
=
=−==
==
=
1
1
11
21
1
1
d)(')('))(')(('))('))((())((
1,1;dd
d)(
d
d
d
d)(
d
d
d
d))(())((
)(;dd
d))((
d
d))((
d
d))(())((
d)()')(()')(()(
2
1
1
lllll
ll
illll
l
l-
eqepeee
qpee
ee
i
qe
i
pee
x
x
l
q
l
p
l
pq
FNFNFFAFE
xN
xN
xFAFE
Fxx
Fx
Fx
FAFE
xxxxAxEK
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2016 / Jarkko Niiranen
326
=
−
−=
1
1
2
b,
11
11ll
l
l h
h
EAfK
For constant loading and constant material parameters, the element stiffness matrix
and force vector of a 1D linear (two-node) element (with element number l) are
−
=
=
−
==
=
−
−
−
qph
EA
Aqph
EA
qp
qp
hFAFE
FNNFAFE
l
l
l
ee
eqpee
ll
lll
,
,constant Efor ,,
,2/1
,2/1d
2))(())((
d))(')((')('))(())((
1
1
1
1
1
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2018 / Jarkko Niiranen

327
Remark. For non-constant material parameters or loadings, the integrals appearing
in the matrix and vector entries of the reference element are computed with the aid of
a quadrature of numerical integration which is chosen according to the type of the
integrand.
Remark. The reference element stiffness matrix and force vector can be modified to
the needs of any problem having the same generic form as the bar problem: for heat
diffusion, for instance, EA is simply replaced by k and so on.
Remark. Similar local stiffness matrices and force vectors for the simples cases of
constant parameters can be derived for higher-order elements as well. The size of
the matrices and vector naturally depends on the number of nodes in the reference
element (see the Theoretical exercises): for the 1D quadratic (three-node) element,
the sizes are 3 x 3 (stiffness) and 3 x 1 (force) .
Remark. Much of the efficiency and adaptability of FEM comes from the reference
element concept and its implications to the computer implementations and the use of
the memory and processor units of computers (even up to parallelization).
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2020 / Jarkko Niiranen
329
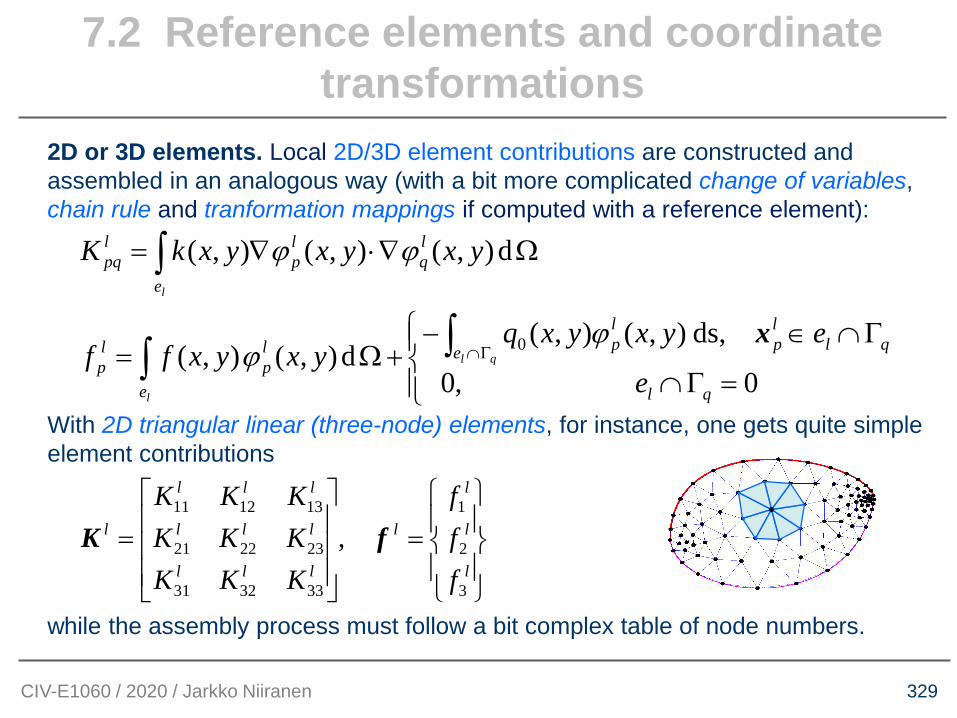
2D or 3D elements. Local 2D/3D element contributions are constructed and
assembled in an analogous way (with a bit more complicated change of variables,
chain rule and tranformation mappings if computed with a reference element):
With 2D triangular linear (three-node) elements, for instance, one gets quite simple
element contributions
while the assembly process must follow a bit complex table of node numbers.
=
−+=
=
0,0
,ds),(),(d),(),(
d),(),(),(
0
ql
ql
l
pe
l
p
e
l
p
l
p
e
l
q
l
p
l
pq
e
eyxyxqyxyxff
yxyxyxkK
ql
l
l
x
=
=l
l
l
l
lll
lll
lll
l
f
f
f
KKK
KKK
KKK
3
2
1
333231
232221
131211
, fK
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2020 / Jarkko Niiranen
331
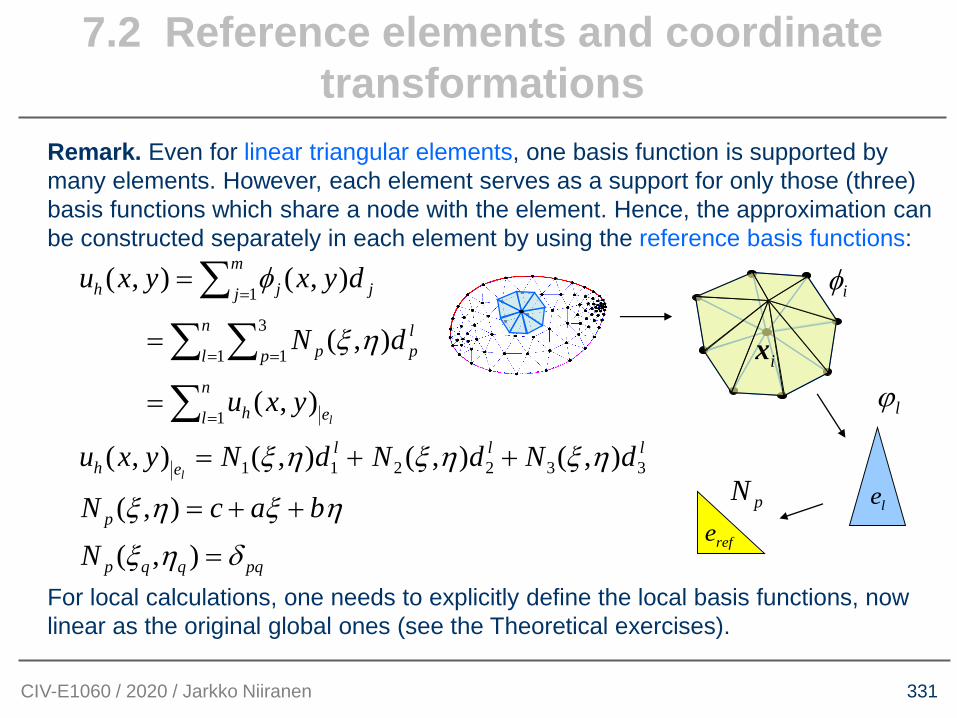
Remark. Even for linear triangular elements, one basis function is supported by
many elements. However, each element serves as a support for only those (three)
basis functions which share a node with the element. Hence, the approximation can
be constructed separately in each element by using the reference basis functions:
For local calculations, one needs to explicitly define the local basis functions, now
linear as the original global ones (see the Theoretical exercises).
pqqqp
p
lll
eh
n
l eh
n
l p
l
pp
j
m
j jh
N
bacN
dNdNdNyxu
yxu
dN
dyxyxu
l
l
=
++=
++=
=
=
=
=
= =
=
),(
),(
),(),(),(),(
),(
),(
),(),(
332211
1
1
3
1
1
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2020 / Jarkko Niiranen
ix
i
refe
le
l
pN
334
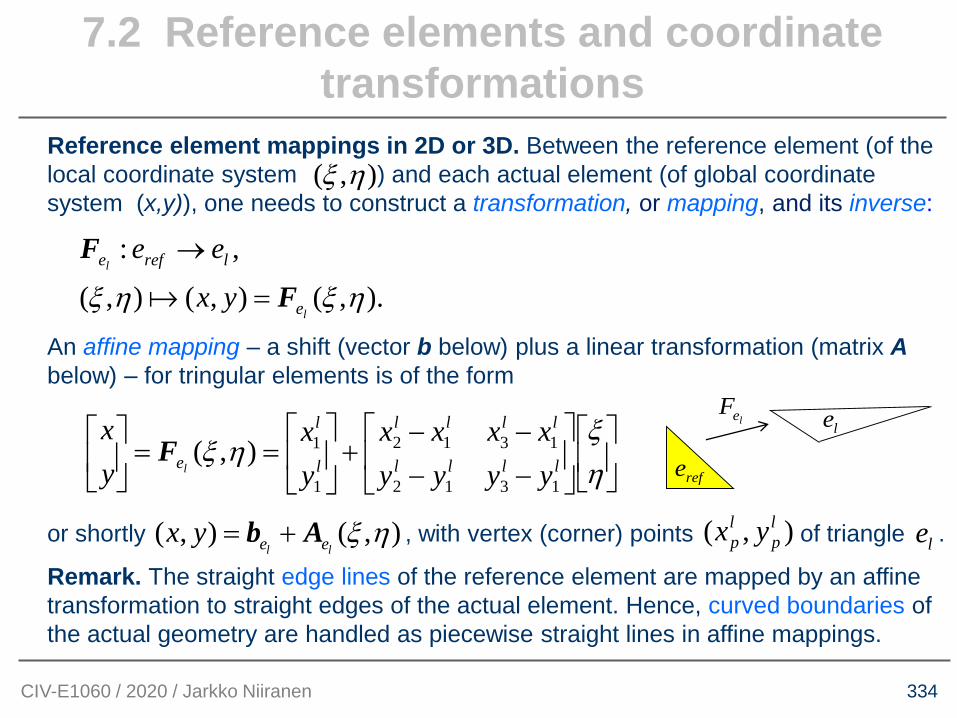
Reference element mappings in 2D or 3D. Between the reference element (of the
local coordinate system ) and each actual element (of global coordinate
system (x,y)), one needs to construct a transformation, or mapping, and its inverse:
An affine mapping – a shift (vector b below) plus a linear transformation (matrix A
below) – for tringular elements is of the form
or shortly , with vertex (corner) points of triangle .
Remark. The straight edge lines of the reference element are mapped by an affine
transformation to straight edges of the actual element. Hence, curved boundaries of
the actual geometry are handled as piecewise straight lines in affine mappings.
).,(),(),(
,:
l
l
e
lrefe
yx
ee
F
F
=
→
refe
leleF
−−
−−+
==
llll
llll
l
l
eyyyy
xxxx
y
x
y
xl
1312
1312
1
1),(F
),(
),( l
p
l
p yxle
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2020 / Jarkko Niiranen
( , ) ( , )l le ex y = +b A

335
Example. In a Master’s Thesis (Kimmo Ylinen, 2016: Crack Spacing in Reinforced
Concrete Members with Large Diameter Rebars and Thick Concrete Covers),
hexahedral (20-node) 3D elements were required even from the geometrical point of
view: for properly representing the curved geometry of the contact surfaces between
the rebars and concrete.
Simulations for an extension test:
- software package: Code_Aster
- symmetry conditions utilized
- method verification with different mesh sizes
- model validation versus an experimental test
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2020 / Jarkko Niiranen

336
The crack spacing from the FEM simulation quite well follows an experimental test:
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2020 / Jarkko Niiranen
337
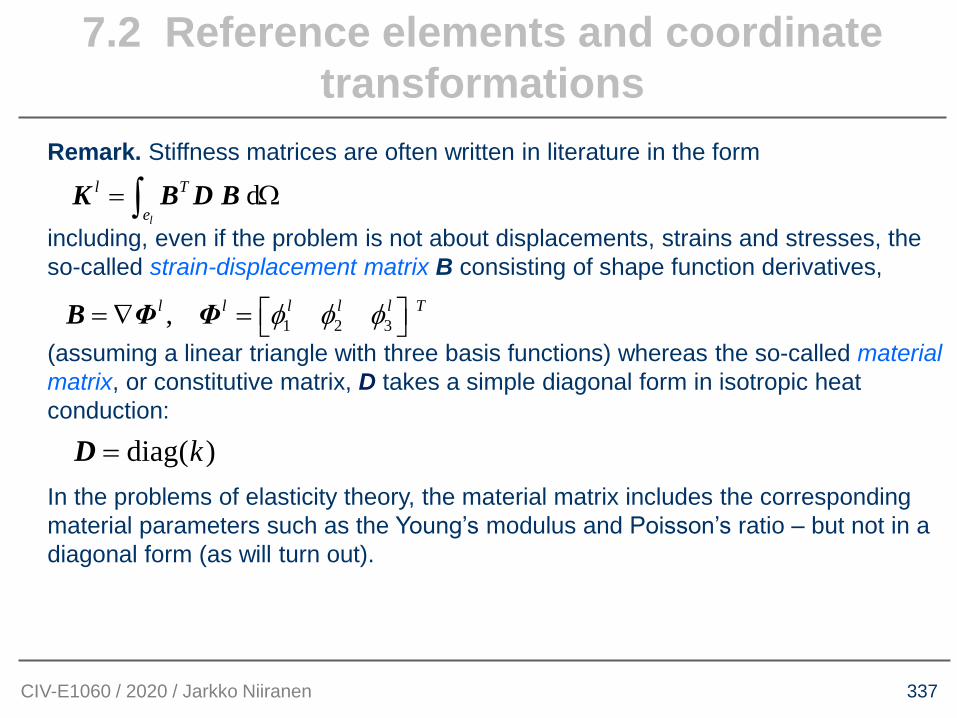
Remark. Stiffness matrices are often written in literature in the form
including, even if the problem is not about displacements, strains and stresses, the
so-called strain-displacement matrix B consisting of shape function derivatives,
(assuming a linear triangle with three basis functions) whereas the so-called material
matrix, or constitutive matrix, D takes a simple diagonal form in isotropic heat
conduction:
In the problems of elasticity theory, the material matrix includes the corresponding
material parameters such as the Young’s modulus and Poisson’s ratio – but not in a
diagonal form (as will turn out).
dl
l T
e= K B D B
7.2 Reference elements and coordinate
transformations
CIV-E1060 / 2020 / Jarkko Niiranen
diag( )k=D
1 2 3,l l l l l T = = B Φ Φ
338
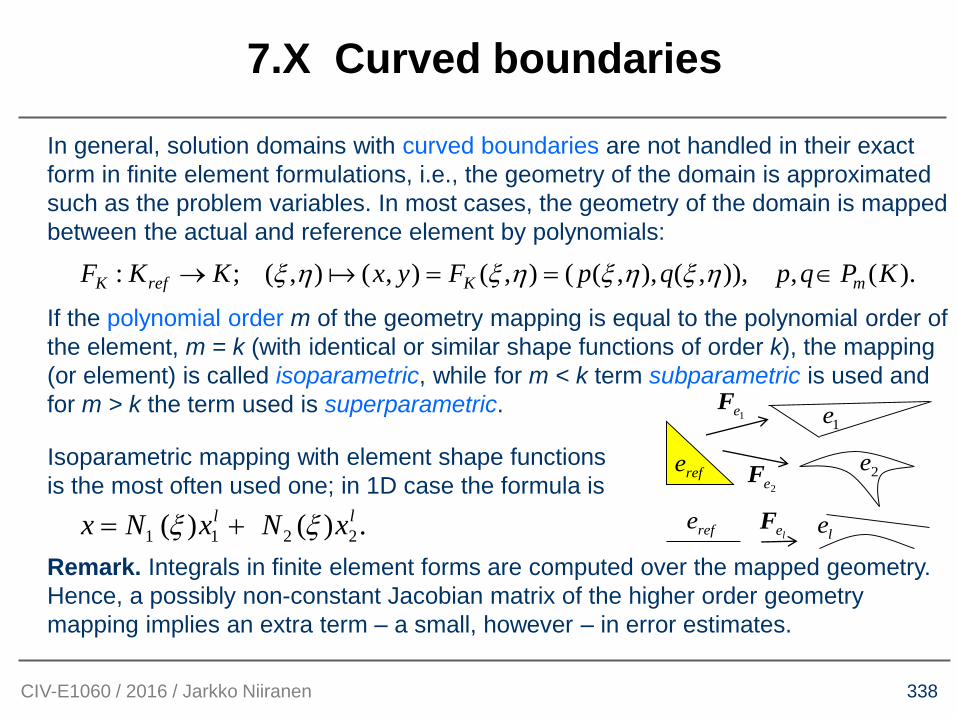
7.X Curved boundaries
In general, solution domains with curved boundaries are not handled in their exact
form in finite element formulations, i.e., the geometry of the domain is approximated
such as the problem variables. In most cases, the geometry of the domain is mapped
between the actual and reference element by polynomials:
If the polynomial order m of the geometry mapping is equal to the polynomial order of
the element, m = k (with identical or similar shape functions of order k), the mapping
(or element) is called isoparametric, while for m < k term subparametric is used and
for m > k the term used is superparametric.
Isoparametric mapping with element shape functions
is the most often used one; in 1D case the formula is
Remark. Integrals in finite element forms are computed over the mapped geometry.
Hence, a possibly non-constant Jacobian matrix of the higher order geometry
mapping implies an extra term – a small, however – in error estimates.
).(,)),,(),,((),(),(),(;: KPqpqpFyxKKF mKrefK ==→
refe
1e1eF
2e2eF
.)()( 2211
ll xNxNx += refeleF
le
CIV-E1060 / 2016 / Jarkko Niiranen
QUESTIONS?
ANSWERS”
LECTURE BREAK!