-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
1/42
10M odern Abrasive Processes
10.1 Ultrasonic MachiningUltrasonic machining (USM) is the
removal of hard and brittle materialsusing an axially oscillating
tool at ultrasonic frequency (18-20 kHz). Duringthat oscillation,
the abrasive slurry of B4C or SiC is continuously fed into
themachining zone, between a soft tool (brass or steel) and the
workpiece. Theabrasive particles are, therefore, hammered into the
workpiece surface andcause chipping of fine particles from it. The
oscillating tool, at amplituderanging from 10 to 40 um, imposes a
static pressure on the .abrasive grainsand feeds down as the
material is removed to form the required tool shape(Figure
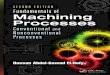
10.1).The machining system, shown in Figure 10.2, is composed
mainly fromthe magnetostricter, concentrator, tool, and slurry
feeding arrangement. Themagnetostricter 1S energized at the
ultrasonic frequency and produces smallamplitude of vibration which
is arnplified using the constrictor (mechanicalamplifier) that
holds the tool. The abrasive slurry is pumped between
theoscillating tool and the brittle workpiece.Tlic magnetostricer:
The magnetostricter, shown in Figure 10.4, has a highfrequency
winding on a magnetostricter core and a special polarizingwinding
around an armature. The magnetostriction effect was firstdiscovered
by Joule in Manchester in 1874. Accordingly, a magnetic
fieldundergoing ultrasonic frequencies causes corresponding changes
in aferromagnetic object placed within its region of influence.
This effect isused to oscillate the USM tool, mounted at the end of
a magnetostricter, atultrasonic frequencies of 18-20 kHz.
M C c ! l I 7n iC l 7 / l 7mp l i fi c r : The elongation
obtained at the resonance frequency iston smaIl for practica!
machining applications. The vibration amplitude is,therefore,
increased by fitting an amplifier (acoustic horn) into the
outputend of the magnetostricter. Larger amplitudes of typically
40-50 um are
2 9 9
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
2/42
3 0 0 Fundamcntals of Mncllinil1g Procesees
Leadstotransducerwinding il~-::::-----.;1-;rr.r.:': ~----:...
L------------ - - ------ .::: : .:. .:::= T I ~ t . : : - - ~ - -
Magnetostrictionl l i : . ; g r 0 < l l l : . H - - - - - - . I
~ ; ; ; ; , " ,Coolingwater
Concentrator
ToolWorkpiece
FIGURE 10.1Main elernents of ultrasonic machining systcm.
suitable for practical USM applications. Depending on the
amplitud erequired, theamplification process canbeachieved by
oneormore acoustichorns. Tohave themaximum amplitude of vibration
(resonance) the lengthof the concentrator ismade multiples of
onehalf thewavelengths of soundin the concentrator (horn) material.
Thechoice of the shape of the acoustichorn controls the final
amplitude of vibration. Five acoustic horns, whichinclude
cylindrical, stepped, exponential, hyperbolic cosine, and conical,
arecommonly used inUSM.Aluminum bronze and marine bronze are cheap
with high fatigue
strength of, respectively, 185and 150MN/m2, which makes them
suitablefor acoustic horns. Themain drawbacks of
themagnetostrictive transducer
Static pressure -vibrationsAbrasives +water
. -Workpiece
Localized hammering Cavitation erosionree impactFIGURE
10.2Material removal mechanism in USM.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
3/42
tviodcrn Abmsive Procl'SSCS 3 0 1are the high losses
encountered, low efficiency (55/,,), and consequent heatup and need
for cooling. Higher efficiencies (90-95%) are possible by
usingpiezoclectric transformers to modern USM machines,Tools: Tool
tips must have high wear resistance and high fatiguestrength. For
machining glass and tungsten carbide, copper andchromium silver
steel tools are recommended. Silver and chromiumnickel steel are
used for machining sintered carbides. During USM, toolsare fed
towards. and held against, the workpiece by rneans of a
staticpressure that has to overcome the cutting resistance at the
interface of thetool and workpiece.Abrasive slurri]: The abrasive
slurry is usually composed of 50% (byvolume) fineabrasive grains
(100-800 grit) ofboron carbide (B,.C),aluminurnoxide (Al203), or
silicon carbide (SiC) in 50% water. The abrasive slurry
iscirculated between the oscillating too! and workpiece through a
nozzle closeto the tool-workpiece interface at an approximate rate
of 25 L/min.
Materia! remooal proccss: Under the effect of the static feed
force and theultrasonic vibration, the abrasive particles are
hammered into the workpiecesurfacc causing mechanical chipping of
minute particles. Figure 10.2 showsthe complete material removal
mechanism of USM, which involves threedistinct actions: Mcchanical
abrasion by localized direct hammering of the abrasivograins stuck
between the vibrating tool and adjacent work surface The micro
chipping by free impacts of particles which fly across themachining
gClpand strike the workpiece at random locations Thc work surfnce
erosin by cavitation in the slurry strearn
10.1.1 Mechanism of Material RemovalUsing the theory of Shaw
(1956), material removal by USM due tocavitations under the tool
and chemical corrosion due to slurry media areconsidered
insignificant. Therefore, the material removal due to these
twofactors has been ignored. The material removal by abrasive
particles due tothrowing and hammering only has been
considered.Abrasive particles are considered spherical in shape
having diarneter d.Abrasive particles, suspended in a carrier, move
under the high frequencyvibrating too\. There are two possibilities
when the too! hits an abrasiveparticle. If the size of the particle
is small and the gClpbetween the bottom ofthe tool and the work
surface is large enough, then the particle will bethrown by the
tool to hit the work surface (throwing model). Under thereverse
condition, the particle will behammered ovcr the workpiece
surface.In both cases, the particle creates a crater of depth I z p
and radius rp' lt isassurned that the volume nf material removed
isapproximately proportionalto the indentation diameter (2rp)'
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
4/42
302 F undamentals 01Machining P rocesses
Tool
FIGURE 10.3Development of fracture in the workpieee due to
hitting by a grain; (a) by throwing; (b) byhammering; and (e)erater
shape.
The volume of material removed, Qw shown by the dotted line
inFigure 10.3, assuming a hemispherical crater, due to fracture per
grit percycle is given by
Q =! ( ~ 7 T T 3 )2 3 pAccording to Figure 10.3,it can be shown
that
r = ( d a) 2 _ ( d a_h ) 2 ss d hp 2 2 p apTherefore, Qy
becomes
where kl isaconstant and thenumber of impacts Ni on theworkpiece
by thegrits in each cycle depends on the number of grits beneath
the tool at anytime. This is inversely proportional to the diameter
of the grits (assumedspherical) as
1N =k2-1 d2awhere k2is aconstant ofproportionality. All
theabrasive particles under thetool need not necessarily
beeffective. Letk2betheprobability of an abrasiveparticle under
thetool being effective. Then thevolume ofmaterial removed
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
5/42
Modern Abrasive Processes 303per second VRR equals the frequency
i r times the amount of materialremoved per cycle Qv:
f h rVRR =Q v!r =klk2k3yti rToevaluate thedepth ofpenetration hp
of anabrasive particle, Shaw (1956)
proposed the following.For the grain-throwing model :
where hth is thedepth of penetration due togrit throwing inmm,
a/2 is theamplitude of tool oscillation, i r is the frequency of
tool oscillation, da is thegrit diameter, P '1 is the density of
abrasive grits, and a.; is themean stressacting upon theworkpiece
surface.The volumetric removal rate due to the throwing mechanism
VRRthbecomes
[1 f2a2p ]VRR = klk2k3 t a d {S/2th 6 zt! r(Jw
F or thc grain-hammering model: When the gap between the tool
and theworkpiece is smaller than thediameter of thegrit d
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
6/42
304 F undamcntals 01Machinng ProccssesThe volumetric removal
rate from the workpiece due to the hammeringmechanism VRRh can be
evaluated as
The computational results of [ain (2004) showed that
where hh is the depth of penetration due to grit hammering in
mm, ;. is thefrequency of tool oscillation in l/s, (}is the mean
stress acting upon the toolin Nz'mm''. p~ is the density of
abrasive grits in g/cm3, (}wis the mean stressacting upon workpiece
surface in Nz'mm'', and Fav is the mean force on thegrit in
N.10.1.2 Sol ved ExampleCalculate the ultrasonic machining time
required for a hole of diameter6mm in tungsten carbide plate
(fracture hardness =6900 N/mnl) if thethickness of the plate is 1.5
hole diameter. The mean abrasive grain size is1511mdiameter. The
feed force is equal to 3.5N. The amplitude of tooloscillation is 25
um and the frequency is equal to 25kHz. The toa] materialused is
copper having fracture hardness equal to 1.5X 103N/ mm/. Theslurry
contains one part abrasives to one part water. Take the values
ofdifferent constants as kl =0.3, k2=1.8mm/, k3=0.6, and abrasive
density =3.8g/ cm'. Calcula te the ratio of the volume removed by
throwing to thatremoved by hammering (Jain, 2004).Solution
Given:Hole diameter, da=6X10-3 mPlate thickness=1.5Xhole diarneter
=Rx IT mMean abrasi ve grain size=15X 10- hmFeed force=3.5
NAmplitude of tool vibration, at/2=25X10-6 mFrequency of
oscillation, ; .=25,000cpsFracture hardness of workpiece material,
(}w=6.9X109 N/m2Abrasive grain density, p" =3.8 X 103kg/m3kl
=0.3k2=1.8 mm2=1.8X10-6 m2k3=0.6Throwing model:
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
7/42
Modern Abrasive P rocesses 305
n =1.78 X 10-5 mm
f E 3VRR =kJ k2k3 ~{th d )ra(1.78 X 10-5)32.5 X 104VRRth =0.3 X
1.8 X 0.6 1.5 X 10-2
Hammering model:4Favatda
(T w7rk2(j +1)j =(Tw =6900 =4.6
(Tt 1500
4 X 3.5 X (2 X 25 X 1O---{)X (1.5 X 10-5)hw = 7rX (1.8 X
10---{)X (6.9 X 10':1)X (4.6+1)
hw =2.182 X 10-4 mm
(2.192 X 10-4)3 4VRRh =0.3 X 1.8 X 0.6 2 2.5 X 101.5X 10-
The total removal rate VRR =VRRth +VRRh. The machining time
t-.becomesVolume of holet-: = VRR (7r/4)62 X 90.21987
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
8/42
306 F undamenials 01M achining P rocesses
tm =19.289mnVRRth =0.023VRR
It isclear that thematerial removed byhammering ismuch more than
thatremoved by throwing (43 times); therefore, for approximate
calculations,VRRth can be ignored.InUSM, the linear (theoretical)
material removal rate VRRL inmm/s cangenerally bedescribed using
the following imperial formula (Jain, 1993)
(at) ( d a ) 0.5 ( a t)o.5
VRR =5.9fr Hr 2 2where fr is the frequency of oscillation inHz,
at is the static stress on tool inNz'rnm', H, is the surface
hardness of the workpiece (rrXcompressivefracture) strength
(Nz'mrrr'), da/2 is themean radius of grit inmm, and at/2is the
amplitude of vibration inmm.Incaseofhard andbrittle materials
suchasglass, themachining rateishigh
and the role played by the free impact is noticed. When
machining porousmaterials such asgraphite, themechanism of erosion
is introduced. Therateof material removal in USM depends, first of
all, on the frequency of toolvibration, staticpressure, thesizeof
themachined area, and theabrasive andworkpiece material. The
material removal depends on the brittlenesscriterion, which is the
ratio of shearing tobreaking strength of amaterial.According
toTable10.1,glasshas ahigher removal rate than that of ametal
ofsimlar hardness. Moreover, due tothelowbrittleness criterion of
steel, whichis softer, it is used as atool material. Figure
10.5summarizes the importantparameters that affecttheperformance of
USM,which aremainly related toT AB L E 10.1Typical Process
Characteristics of USM (Tool: Low Carbon Steel; Slurry: 30-40%
of180-240 grit B4C; Amplitude: 0.025-0.035 mm; Frequency: 25
kHz)
Material Removal RatePenetration MaximumWork Volume Rate
Practical ToolMaterial (mm3/min) (mm/rnin) Area (mrrr') Wear
Ratioa
Glass 425 3.8 2580 100:1Ceramic 185 1.5 1935 75:1Ferrite 390 3.2
2260 100:1Quartz 200 1.7 1935 50:1Tungsten 40 0.4 775
1.5:1carbideToa] steel 30 0.3 775 1:1Source: FromRao, PN.,
Manujacturing Technology: Metal Cutting and Iviacnine Tools,
8thEd.,NewDelhi, TataMcGraw-Hill Publishing Company Limted, 2000.a
Ratio of material removed fromthework to that removed fromthe
too!.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
9/42
Modern Abrasive Processes 307.~I
Machining conditions Frequency Amplitude Pressure Depth Area
Machine condition+ WorkpieceAbrasive slurry Ductility Type Hardness
Size ~ Removal rate, Compression~ Carrier liquid Surface quality,
strength Feeding method Accuracy Tensile strength Concentration
tTool Hardness Wearability Accuracy Fatigue strength Mounting
FIGURE 10.5Factors affecting USM performance.
thetool, workpiece material, the abrasives, machining
conditions, and themachine tool.
10.1.3 Factors Affecting Material Removal RateTool oscillation:
The amplitude of tool oscillation has the greatest effectof
alltheprocess variables. Theamplitud eof oscillation varies within
thelimits of0.04-0.08 mm. Thematerial removal rate increases with
riseintheamplitudeof tool vibration (Figure 10.6). The vibration
amplitude determines thevelacity of the abrasive particles at the
interface between the toal andworkpiece. Under such circumstances,
the kinetic energy rises at largeramplitudes, which enhances the
mechanical chipping actian and conse-quently increases theremoval
rateoGreater vibratian amplitudes may lead tathe accurrence af
splashing, which causes a reduction af the number afactive abrasive
grains and results in thedecrease of themetal removal rateoThe
increase af feed force induces greater chipping farces by each
grain,which raises the averall remaval rate (Figure 10.6and Figure
10.7).Regarding theeffectaf vibratian frequency on theremaval rate,
foragiven
amplitude, the increase in vibration frequency reduces the
removal rate(Figure 10.8). This trend may be related ta thesmall
chipping timeallawedforeach grain such that lower chipping action
prevails causing adecrease inremaval rateoThesame figureshaws that,
foragiven frequency, theincreaseaf removal rate at higher
amplitudes.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
10/42
308 F undamentals of Machining P rocesses
ro>oEoE
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
11/42
Modern Abrasive P rocesses 309
~oEQ)a:
Frequency
AmplitudeFIGURE 10.8Variation of removal ratewith vibration
amplitude and frequency.
flow of slurry results in an enhanced machining rateo In
practice, avolumetric concentration of about 30-35% of abrasives is
recommended.The increase of abrasive concentration up to
40%enhances themachiningrateoMore cutting edges become available in
the machining zone, whichraises the chipping rate and consequently
the overall removal rate(Figure 10.12).Workpiece impact hardness:
Themachining rate isaffectedby theratio of tooltoworkpiece hardness
(Figure10.13).Inthis regard, thehigher theratio, thelower will be
the material removal rateoFor this reason, soft and toughmaterials
are recommended for USM tools.
ai>oEQ)a:
Theoretical////// Actual
Mean grain sizeFIGURE 10.9Variationof removal ratewith mean
grain size.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
12/42
310 Fnndiuncntal o f MIlc/lil/il/g Pro(('~SCS
Q)~((l>oEQ)a:
------------~Particle velocity
FIGURE 10.10Variation of rCIl1l1vZlI ratc with particlc
vclocity.
Ton! stuu: The machining rate is affcctcd by the tool shape and
area. Theincreasc of tool
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
13/42
v fodc l'I1 A brasioe PrO(I 's s ,S 31 1
m>oEQ)n ::
>
SiC
30 % Abrasive concentrationFIGURE 10.12Variation of rl'1ll0V,11
rute abr.isive conccntr.rtion and typc,
tool censes to break aWoEQ)o:
Tool/Work hardnessFIGURE 10.nVari.ition of n-moval I"
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
14/42
eoc o-.Q )eQ Je,
lool diameter, d1
~d2>d1
d3>d2
Feed forceFIGURE 10.14Variation of pcnetration rate with fecd
force at diffcrent tool diameters,
Inaccurate feed of the tool holder Form error of the tool
Unsteady and uneven supply of abrasive slurry around theoscillating
tool
Overcut: The overcut is considered to be about 2-4 times greater
than thcmean grain size when machining glass and tungsten carbide.
It is about 3times greater than the mean grain size of B4C (mesh
number 280-600). Themagnitude of the overcut depends on many other
process variables,including the type of workpiece material and the
method of ultrasonictool feed. I n general, USM accuracy levels are
limited to +0.05mm.Conicity: The conicity of holes is approximately
0.20when drilling of
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
15/42
P rocessl~Ii1t!ern Abrasive P rocesses
e
he ,t3 I
he j1iic ,I,
a ,I. t1I
313
100C /lC /l Glass)e 75..cOl::JeQ) 50al't:: :J(j)
25 Tungsten carbide
50 100 150Mean grain size
FIGURE 10.15Effectof grain size on surface roughness for
different workpiece materials.
A relationship canbe found between thecrater dimensions: crater
diameteris one third of the abrasive grain diameter and the depth
is one tenth(McGeough,2002).Astheamplitude israised theindividual
grains arepressed further into the
workpiece surface, thus causing deeper craters and, therefore, a
roughersurface finish. Smoother surfaces canalsobeobtained when
theviscosity ofthe liquid carrier of theabrasive slurry isreduced.
Thesurface irregularitiesof the sidewall surfaces of the cavities
areconsiderably larger than those ofthebottom. This results
fromthesidewalls beingscratched bygrains enteringand leaving
themachining zone. Cavitations damage tothemachined surfaceoccurs
when the tool particles penetrate deeper into the workpiece.
Undersuch circumstances, it ismore difficult to replenish
adequately the slurry inthese deeper regions and arougher surface
isproduced.
l'
TABLE 10.2Grit Number, Grit Size, and Surface Roughness in
USMGrit Number Grit Size (rnm) Surface Roughness
(um)180240320400600800
0.0860.0500.0400.0300.0140.009
0.550.510.450.40.280.21
Source: Metals Handbook (1989). Reproduced by permission of ASM
International.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
16/42
314 Fundanzentals of Machining Processes
ToolVibration +Static pressure +1000 RPM~c:Slurry
Finished \workpiece ~
Slurry/Finishedworkpiece
Finishedworkpieceut-off Feed
FIGURE 10.16Rotary USM configurations.
10.1.6 ApplicationsUSM should beapplied for shallow cavities cut
inhard and brittle materialshaving asurface arealess than
1000mm'.Rotary ultrasonic machining: A modified version of USM is
shown inFigure 10.16where a tool bit is rotated against the
workpiece in a simlarfashion to conventional coring, drilling, and
mlling. RUM ensures highremoval rates, lower tool pressures for
delicate parts, improved deep holedrilling, less breakout or
through holes, and no core seizing during coredrilling. The process
allows the uninterrupted drilling of small diameterholes.
Conventional drilling necessitates a tool retraction, which
increasesthemachining time. Thepenetration rate depends on the size
and depth ofcavity. Small holes require more
timeastherateofmachining decreases withdepth ofpenetration due
tothedifficulty inmaintaining acontinuous supplyof new slurry at
the tool face. Generally, adepth-to-diameter ratio of 2.5
isachievable by RUM.Sinking: During USM sinking, the material
removal is difficult when themachined depth exceeds 5-7mm or when
the active section of the toolbecomes important. Under such
conditions the removal of theabrasive gritsat theinterfacebecomes
difficult and, therefore, thematerial removal processisimpossible.
Moreover, themanufacture of such atool isgenerally complexand
costly. Contouring USM (Figure 10.17), employs simple tools that
aremoved in accordance to the contour required.Production 01EDM
electrodes:USMhasbeen used toproducegraphite EDMelectrodes. Typical
ultrasonic machining speed ingraphite ranges from0.4to1.4cm/mno
Surfacefinishrange from0.2to1.511mandaccuracies of1011maretypical.
Small machining forcespermt themanufacture offragile graphiteEDM
electrodes.Polishing: Ultrasonic polishing occurs by vibrating
abrittle tool materialsuch as graphite or glass into the workpiece
at ultrasonic frequency and
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
17/42
Vibration +Static tRed Vibration +Static feed +NC rnotiont ! t
!Slurry
Tool path
'./Sinking Warkpiece Contouring
FIGURE 10.17lJSM dil' xink inj; illldc(lnt()uring.
rel
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
18/42
316 Fundamentals of M achining P rocessesPressure gauge
Powdersupplyand mixer
J et
RegulatoGassupply Nozzle
WorkpieceibratorFIGURE 10.18Abrasive jet machining systems.
It is not practical to reuse the abrasive powder because
contaminations andworn grit cause adecline in themachining
rateoTheabrasive powder feedrate is controlled by the amplitude of
vibrations of the mixing chamber.The nozzle stand-off distance is
kept at 0.81mm. The relative motionbetween the workpiece and the
nozzle is manually or automaticallycontrolled using camdrives,
pantographs, tracer mechanisms, or computercontrol according to the
cut geometry required. Masks of copper, glass, orrubber may be used
to concentrate the jet stream of the abrasive particlesto a
confined location on the workpiece. Intricate and precise shapes
areproduced by using masks with corresponding contours. Dust
removalequipment is incorporated to protect the environment.
Air and abrasivesstream
Sapphire nOZZle~ ~ ~~ ~ J et diameter (0.3-0.5 mm)et velocity
(150-300 ms). Stand-off distance (0.8mm)rT777"7A rr:,.,.- ." ..r ,.
,
...;1>--WorkpieceFIGURE 10.19Abrasive jet machining
terminology.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
19/42
tviodem Abrasioe P rocesses 31710.2.1 Material Removal RateIn
AJM, the abrasive particles frorn the nozzle follow parallel paths
for ashort distance and then the abrasive jet flares outward like a
narrow cone.When the abrasive particles of Ah03 or SiC, having
sharp edges, hit a brittleand fragile material at high speed, they
dislodge a small particle fram it by atiny brittle fracture. The
lodged out particle is carried away by the air or gas.The material
rernoval rate, VRR, is given by
where K J is a constant, N" is the number of abrasive particles
impacting/unitarca, d" is the rnean diarneter of abrasive
particles, P" is the density ofabrasive particles, H, is the
hardness of the work material, and vis the speedof abrasive
particles.Material removal rate, workpiece accuracy, surface
raughness, and nozzle
wear are influenced by the size and distance of the nozzle,
composition,strength, size and shape of abrasives, flow rate, and
composition, pressure,and veloci ty of the carrier gas. The
material rernoval rate is rnainlydependen! on the flow rate and the
size of abrasives. Larger grain sizeproduces greater rcmoval
rates.The typical material rernoval rate is 16.4 mm3/min when
cutting glassand for metals it vares from 1.6 to 4.1 mm 'ymin. For
harder ceramics,
cutting rates are about 50'1,.higher than those for glass. The
minimum widthof cut is O.IJ mm. Toleranccs are typically 0.13 rnrn
with O.05 mrnpossible using good fixation and motion control. The
produced surfacehas a randorny matte texture. Surface roughness of
0.2 to 1.5um using 10ami 50 um particlcs, respectively, can be
attained. Taper is present indeep cuts. High nozzle pressure
results in greater rernoval rate, but thenozzle life is dccreased.
Table "10 .3 sumrnarizes the overall
processcharacteristics./vbrasit: flmu I' I7 tc : !\t a particular
prcssurc, thc volumetric rernoval ratcincreases with abrasive flow
rate up to an optimum value then decreaseswith further increase in
the flow rateo This is mainly due to the fact that masstlow rate of
the gas dccreases with the mercase of the abrasivo flow rateo
Themixing ratio increases, causing a decrease in rernoval rate beca
use of thedecreasing flow vclocity ,1I1d thc kinetic energy
available for materialremoval (Figure '10.20 and Figure
10.21).Nozzle ~ tl1J /d -o fld i~ tI7 llc L ': The cffect of nozzle
stand-off distance is shown inFigure '10.22. Thc rcmoval rate
attains
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
20/42
318 F undnmcntal of M achining P rocesscs
TA BL E 10.3Abrasivo Jet Machining Proccss
CharactcristicsAhrasiocTypeSizcFlow rateMcdill/
llTypeVelocityPressureFlow ratcNozzleMaterialShapc
AI2o.1or SiC (used once)Around 25 um3-20 g/minAir or CO2150-300
ms2-8 kg/cm228 Llmin
Tip distanccL ifeOperating angleAreaTolcranccSurfacc
roughness
WC or sapphircCircular, 0.3-0.5 mrn diamcter. ' 2Rectangular
(0.08X 0.51mm to 6.6] X 0.51mm)0.25.:...15mrn
WC (12-30 h), sapphirc (300 h)Vcrtica I tu 60 off vcrtica
I0.05-0.2 mm20.05 mm0.15-0.2 urn (10 um particles)0.4-0.8 um (25 um
particles)1.0-1.5 um (20 um particles)
Gas p resslIre : The increase of gas pressure increases the
kinetic energy and,therefore, the rernoval rate by AIM process
(Figure 10.23).Mixil1g ratio: The rnixing ratio Vx, is defined
asVolurne flow rate of abrasive particles Q"VX = . =.. Volurne flow
rate of carner gas Qg
C '>oE(j)a:
Abrasive flow rateFIGURE 10.20Variation of material removal rate
with the abrasive flow rateo
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
21/42
Modern Abrasive P rocesses 3 1 9
oEQ)((
Velocity of particlesFIGURE 10.21Variation of material removal
rate with the velocity of particles.The increase of Vx increases
the removal rate, but a large value of Vxdecreases the jet velocity
and sometimes blocks the nozzle. Thus an
optimum value of mixing ratio has been observed that gives
themaximumremoval rate (Figure 10.24).Themass ratio Mx isdetermined
by
Mass flow rate of abrasive particles __ MaA 1 x =- - - - - - - -
- - - - - - - - - - - - - - - - ~- - - - - - - - -Mass flow rate of
(carrier gas+particles) Ma+g'10.2.2 Appl ications
Drilling holes, cutting slots, cleaning hard surfaces,
deburring,polishing and radiusing
(1J>oEQ)((
Stand-off distanceFIGURE 10.22Effect of nozzle stand-off
distance on removal rateo
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
22/42
320 F U l ldl l l l /m /tl l s o f M tl c //i l l i l l g
ProCt'SSL'S
C ii>oE(l)a:
~- - - - - - - - - - - - - - - - - - - - - - - 7Gas
pressureFIGURE 10.23Efft-ct uf gas prl'sslIrc on n-rnoval
r.itc.
Dcburring of cross holcs. slots, and thrcads in small prccision
poE(l)a:
-_._._--._--- - ,-------> /Mixill~ratio
FIGURE 10.24Eff(-~ct01 ' rnixing rario un n~111(lv,11 rate.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
23/42
Modern Abrasive Processes Removal of films and delicate cleaning
of irregular surfacesbecause the abrasive stream is able to follow
contours
Advantages: Best suited for machining brittle and heat-sensitive
materials likeglass, quartz, sapphire, ceramics, etc.
Machining super alloys, ceramics, glass, and refractory
materials. Not reactive with any workpiece material. No tool
changes arerequired. Intricate parts of sharp corners can
bemachined. Workpiecematerial does not experience hardening. No
initial hole is required for starting of operation as that
requiredby wire EDM.
Material utilization is high. It canmachine thin materials.
Limitations: Slow removal rateo Stray cutting cannot beavoided
(low accuracy 0.1 mm). Tapering effectmay occur, especially when
drilling inmetals. Abrasive may get impeded in thework surface.
Suitable dust collecting systems should beprovided. Softmaterials
cannot bemachined by the process. Silicadust may beahealth hazard.
Ordinary shop air should be filtered to remove moisture and
oil.
10.3 Abrasive Water J et MachiningWater jetmachining is suitable
for cutting plastics, foods, rubber insulation,automotive carpeting
and headliners, and most textiles. Harder materialssuchasglass,
ceramics, concrete, and tough composites canbecutby addingabrasives
to the water jet during abrasive water jet machining (AWJM),which
was first developed in 1974to clean metals prior to their
surfacetreatment. Theaddition of abrasives to thewater jet enhanced
thematerial-removal rate and produced cutting speeds between 51and
460mm/min.Generally, AWJM cuts 10 times faster than the
conventional machiningmethods used for composite materials.
3 2 1
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
24/42
322 F uudtuncntnls o / M ac/ il /i l /g P r oC C SS L 'SAWJM
uses low pressure of 4.2 bar to accelerate a large volume of
water
(70'1..)and abrasives (30%) mixture up to avelocity of 30 m/s.
Silicon carbides.corundum, and glass beads of grain size 10-150 um
are often used as abrasivematerials (Figure 10.25). Using such a
method rernoves burrs left in steelcomponents after grinding that
are 0.35 mm in hcight and 0.02 mm in width.The burrs are removed by
the erosivc effect of the abrasives: water acts as anabrasive
carrier that darnpens the impact effect on the machined surface.
Theintroduction of compressed air to the water jet enhances thc
deburring action.In AWJM, the water jet stream accelerates abrasive
particles, not the water,
to cause the material removal. After the pure water jet is
created, abrasivesare added using either the injection or
suspension methods. Thc importantparameters of the abrasives are
the material structure and hardness, themechanical behavior, grain
shape, grain size and distribution, and theaverage grain
sizc.Process capobilitcs: Typical process variables include
pressure, nozzlediameter, stand-off distance. abrasive type, grit
number, and workpiece feedrateo Abrasive water jet cuts through
356.6 mrn slabs of concrete or 76.6 mmthick tool steel plate at 38
mm/min in a single pass. The produced surfaceroughness ranges
betwecn 3.8 and 6.4 um, although tolerances of 0.13 mrnare
obtainable. Repeatability of 0.04 mrn, sguareness of 0.043 mm/m,
andstraightness of 0.05 mm per axis are expected.During machining
of glass the cutting rate of 16.4 mm1/min is achieved,
which is 4-6 times higher than that for metals. Surface
roughness dependson workpiece material, grit size, and the type of
abrasives. A material withhigh rernoval rate produces large surface
roughness. For this reason, finegrains are used for machining soft
mctals to obtain thc same roughness ofhard ones. The decrease of
surface roughness at smaller grain size is related
Water~
Pressure generationL ---- ,-,--- 'Abrasive reservoir
Focusing tubeW!!p;;g Workpiece
FIGURE 10.25Abrasivo water jet machiniru; elcmcnts. (Frorn
El-Hofy. H, Adonnccd Mllcliil/il/g Processcs, NOI/-Tradinonat C l l
1 d H y b r i d Processes,McGraw-Hill, New York, 2005. Reproduced
by permission ofMcGraw-Hill eo.)
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
25/42
Modern Abrasive Processes 323lo the reduced depth of cut and the
undeformed chip cross section. Inaddition, the larger thenumber of
grains per unit slurry volume, themoreofthem falls on aunit surface
area.A carrier liquid consisting ofwater with anticorrosive
additives has much
greater density than air. This contributes tohigher acceleration
of the grainswith consequent larger grain speed and increased metal
removal rateoMoreover, thecarrier liquid when spreading over
thesurface fillsitscavitiesand forms a film that impedes the
striking action of the abrasive grains.Bulgesand tops of thesurface
irregularities arethefirst tobeaffected and thesurface quality
improves. Awater air jetpermts onetoobtain, asanaverage,aroughness
number higher by one ascompared with the effectof an air jet.In
high-speed water jet machining of Inconel, the roughness increases
at ahigher feed rate as well as at lower slurry flow rates.Advanced
AWJ machines are now available where the computer loads a
CAD drawing from another system. The computer determnes the
startingand end points and thesequence of operations. Theoperator
then enters thematerial type and tool offset data. The computer
determnes the feed rateand performs themachining operation.
10.3.1 ProcessCharacterist icsThe parameters that affect AWJM
are water (flow rate and pressure),abrasives (type, size, and flow
rate), water nozzle and abrasive jet nozzledesign, machining
parameters (feed rate and stand-off distance), and workmaterial.
Other machining parameters include angle of cutting, traversespeed
(slotting), and the number of passes.Water jet pressure: Figure
10.26 shows the relationship between waterpressure on the depth of
cut for low and high nozzle diameter. There is amnimum pressure
below which no machining occurs. That mnimum
:: o'O..cC : . .(j)o
Nozzle diameter
Water pressureFIGURE 10.26Effect of water pressure and nozzle
diarneter on the depth of cut.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
26/42
324 Fnndnntrnt at o( M n c l t i J l i J lg Proccssce
"5u'O.c1i(j)o
Water pressureFIGURE 10.27F:rkct of water prl'ssurl' and
abrasivo flow r,lll' 011tlw d(Tlh ()f cut.
prcssure depends on the typc of workpicce material. As shown
inFigure ]0.27, thc machining depth tends to stabilize beyond
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
27/42
\'1odern /sbrasioe Processes 3 2 5
"5o'O.c.Q)o
Abrasive flow rateFIGURE 10.29Effect of abrasivo flow rate and
nozzle diarneter on the depth of cut.
Abrasive particle size and material : Common abrasive particle
sizes rangefrom 100to 150grit. For a particular workpiece material
and machiningsystem, there is an optimum particle size that
achieves the largest depth ofcut (Figure10.30).Hashish
(1986)recommended theuseofdifferent abrasivesizes forachieving
deeper cuts. Generally, theharder theworkpiecematerial,the harder
the abrasives that should beused.Traverse rate: As shown in Figure
10.31, the decrease of traverse speedincreases the depth of
machining. An optimum traverse rate formaximumcut area (traverse
speed X depth of cut) is clear,Number of passes: Figure 10.32shows
therelationship between thenumberof passes and the commutative
depth of cut. As the number of passes
"5o'O.c.Q)o
Particle sizeFIGURE 10.30Effect of the abrasivcs particle size
on the depth of cut.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
28/42
326 Fu ndtuncntal ol MncITi lli llg Proccsscs
eo~QJeQJOlCl lQJ. l:
Traverse rateFIGURE 10.31Rc-lationship lx-twccn travc-r-: ratc
and arca geller
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
29/42
Modern Abrasiue Processcs 327increases, the rate of increase of
depth/pass increases because the previousslot tends to focus the
abrasive jet stream for more effectivemachining.Stnnd-off disumce:
An increase in thestand-off distance decreases thedepthof cut. As
shown in Figure 10.33, there is an upper limt for the
stand-offdistance beyond which no machining occurs.
10.4 Abrasive Flow MachiningAbrasive flow machining (AFM)
finishes surfaces and edges by extrudingviscous abrasive media
through or across the workpiece. Abrasion occursonly where the
flowof themedia isrestricted. AFM isused todeburr, polish,radius,
remove recast layers, and produce compressive residual stresses
orprovide uniform air or liquid flow.In typical two-way flow,
theworkpiece ishydraulically clamped betweentwo vertically opposed
media cylinders. Material isremoved by the flow of
a semsolid abrasive compound through a restrictive passage
formedby awork part/ tooling combination (Figure 10.34).This causes
the mediaviscosity to ternporarily rise. Theabrasive grains areheld
tightly in place atthis point and the media acts as a grinding
stone that conforms to thepassage geometry. Consequently, the media
slug uniformy abradesthe walls of the extrusion passage. Media
viscosity returns to normal afterthe slug passes through the
restricted area. By repeatedly extruding themedia fromonecylinder
totheother, theabrasion action occurs as themedia
Hydraulicallyoperated -4..?r--""~""pistons
Fixture
Lowermediachamber
Lowermediachamber
--~~~~~~#~~2~~--orkpieceViscousabrasivemedia
Flow
FIGURE 10.34Abrasive flow machining schcmatic,
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
30/42
32 8 Fundamentals 01M achining Processes
enter a restricted passage and travel through or across the
workpiece. Thematerial removal mechanism is similar to the grinding
or the lappingprocesses.The total volume of material removal, Qv,
in anumber of cycles, no has
been described by Kumar (1998)as
where K1 is thepercentage of grains participating in the
finishing action, K2is the flow stress to BHN hardness number (1for
brittle material, >1 forductile material s), He is the number of
cycles, Pm is the density of media in106g/ cm", H ; is the length
of stroke inmm, 1 is the length of workpiece inmm, Vf is the
velocity of media around the workpiece having a constantradius
inmm/min, a,is thenormal stress acting upon theabrasive grains
inN/rnm", P a is the density of abrasives in 106g/ cm", vp is the
velocity of thepiston in mm/min, H, is the hardness of workpiece,
Cwr is the weight ofabrasives to theweight of abrasives and carrier
medium in percent, and Vmis the volume of abrasive media between
workpiece.
I n a further work, [ain et al. (1999)presented the material
removal rateMRR inmg/min as
Thesurface roughness value, Ra, is given by
where thevelocity ofmedia Vf isincm/min and Am istheabrasive
mesh size(abrasive grain diameter da=5.24/Am).AFM parameters that
have the greatest influence on the process
performance include the number of cycles, extrusion pressure,
gritcomposition and type, workpiece material, and fixture designo
AFM isused for finishing, radiusing, and edge finishing of internal
inaccessiblepassages. Typical surface finish is0.05um. Theviscosity
and flow rate of themedia affecttheuniformity of theremoval rateand
theedge radius size. Lowand steady flowrates arebest
foruniformmaterial removal fromthewalls ofadie. For deburring
applications, Iow-viscosity AFM media and high flowrates
arerecommended (Jain and [ain, 2001).Themedia used consist of
apliable polymer carrier and aconcentration of
abrasive grains. Higher viscosity media are nearly solid and are
used foruniform abrasion of the walls of large passages. Lower
viscosity is suitablefor radiusing edges and for finishing small
passages. The carrier of theabrasives is a mixture of a rubber-like
polymer and a lubricating fluido
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
31/42
1
Modern Abrasive Processes 329By changing the ratio of the
polymer and the lubricating oil, differentviscosities are
obtained.Abrasive grains are mostly made from silicon carbide,
although boroncarbide, aluminum oxide, and diamond canbeused.
Particle sizes range from0.005 to 1.5mm. Larger abrasives cut at a
feed rate, although fine abrasivesprovide fine surface finishes and
accessibility to small holes. Due to theabrasive wear, the
effective life of the media depends on the quality of themedia,
abrasive size and type, the flow speed, and the part
configuration.The extrusion pressure is controlled between 7bar and
200 bar(100-3000 psi), as well as the displacement per stroke, and
the number ofrecipracating cycles. One-way AFM systems flow
theabrasive media throughtheworkpiece in only one direction,
allowing themedia toexit freely from thepart for fast processing,
easy cleaning, and simple quick-exchange tooling.AFM can
simultaneously finish multiple parts or many areas of a
singleworkpiece. Inaccessible areas and complex internal passages
can be finishedeconomically and effectively. Automatic AFM systems
are capable ofhandling thousands of parts per day, greatly reducing
labor costs byeliminating the tedious handwork.Applications of AFM
range frorn precision dies and medical componentsto high-volume
praduction of electronic and automotive parts. Recently,AFM has
been applied to the improvement in air and fluid flow forautomotive
engine components. The pracess can also be used to remove therecast
layers frorn fragile components.Figure 10.35shows that the original
diameter gets wider as the machiningtime and flow pressure increase
due to the increase in the duration and theforces of the abrasion
component. High extrusion pressure also raises therate of media
flow rate (Figure 10.36), which allows for greater number
ofabrasives to do more machining to the hole.
~11li~
alenC ll~Ue
Flow pressure
.. .alO EC llO
TimeFIGURE 1035Effect of time and flow pressure on thc diameter
increase.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
32/42
330 Fundamenials o / Machining P roccsses
Extrusion pressureFIGURE 10.36Effect of extrusion pressure on
media flow rateo
Q J(f)C 'dQ Jtie Hole length'-Q JO EC 'd(5
TimeFIGURE 10.37Effect of time and hole length on diameter
increase.
The increase in diameter decreases as the length of the hole
increases(Figure 10.37).Additionally, the increase in the volume of
themedia that isperforming machining causes thehole tobewider
(Figure 10.38).The effectofmedia flow rate on temperature is shown
in Figure 10.39.
10.5 Magnetic Abrasive MachiningAlthough magnetic abrasive
finishing (MAF)originated intheUnited Statesduring the 1940s, itwas
in the former USSRand Bulgaria that much of the
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
33/42
Modern Abrasioe Processee 331
Media volumeFIGURE 10.38Effect of media volume on the diameter
increase.
development tookplace in late1950sand 1960s.During the
1980s,[apanesefollowed the work and conducted research for various
polishing appli-cations. Figure 10.40 shows the schematic diagram
of MAF apparatus.A cylindrical workpiece is clamped into the chuck
of the spindle thatprovides the rotating motion. Theworkpiece can
beamagnetic (steel) or anon-magnetic (ceramic) material,
themagnetic field linesgoaround throughthe workpiece. Axial
vibratory motion is introduced in the magnetic fieldby the
oscillating motion of the magnetic poles relative to the
workpiece.A mixture of fine abrasives held in a ferromagnetic
material (magneticabrasive conglomerate; (Figure10.41)is introduced
between theworkpieceand the magnetic heads where the finishing
process is exerted by the
Media flow rateFIGURE 10.39Effect of media flow rate on abrasive
flow machining ternperature.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
34/42
332 F undamentals of M achining P rocesses
Vibratorymotion
==--+Magnetic abrasives
FIGURE 10.40Magnetic abrasive machining schematic.
magnetic field. Typically the size of themagnetic abrasive
conglomerates is50-100 umand the abrasives are in the 1-10umrange.
With non-magneticwork materials, themagnetic abrasives are linked
toeachother magneticallybetween themagnetic poles N and Salong the
lines of themagnetic forces,formng flexiblemagnetic abrasive
brushes. Toachieve uniform circulationof the abrasives, themagnetic
abrasives are stirred periodically.
10.5.1 ProcessDescription .MAF operates with magneto abrasive
brushes where the abrasive grainsarrange themselves with their
carrying iron particles to flexibly complywith the contour of
thework surface. The abrasive particles are held firmyagainst the
work surface, while short-stroke oscillatory motion is carriedout
in the axial workpiece direction. MAF brushes contact and act upon
thesurface-protruding elements that form the surface
irregularities. Surfacedefects such asscratches, hard spots, lay
lines, and tool marks areremoved;form errors like taper, looping,
chatter marks can be corrected with alimted depth of 20um. Material
removal rate and surface finish depend onthe workpiece
circumferential speed, magnetic flux density, workingclearance,
workpiece material, the size of the magnetic abrasive
conglom-erates including the type of abrasives used, their grain
size, and volume
Ferromagneticcomponent
FIGURE 10.41Magnetic abrasive conglomerate.
) .
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
35/42
Modern Abrcsioe P rocesses 333fraction in the conglomerate (Fox
et al., 1994). The magnetic pressurebetween the abrasives and the
workpiece is expressed by Kim and Choi(1995) as
where Lois the magnetic permeability in vacuum, Pm is the
magneticpressure, Lris the relative magnetic permeability of pure
iron, Ha is themagnetic field strength in air gap, and W is the
volume ratio of iron in amagnetic abrasive particle.The total
volume removed by the magnetic abrasive brush, Qv in themachining
time ti, is given by
The surface roughness value after amachining time ti is given
by1[ NpN 1C tlfvtm] 21\(t ) = R (O)-- kl-----'----'--
,1 I ,1 I 7fHJ tan f)mwhere kl is the constant of
proportionality, N is the number of magneticparticles acting in the
machining regian simultaneously, Nac is the numberof abrasive
grains in a single conglomera te, tlf is the force acting upon
acutting edge of a single abrasive particle in N, Hr is the
workpiece Brinellhardness in Ny mrn''. 1 is the length of work
surface in mm, v is the velocityof magnetic abrasives in mm/ min,
20m is the mean angle of asperity ofabrasive cutting edge in
degrees, R,1(0) is the initial surface roughness inum, and Ra(tm)
is the surface roughness after time tm in um.
10.5.2 Process CharacteristicsFigure 10.42 shows the magnetic
abrasive particle pressure Pm acting lIponthe work surface. which
increases as the flux density on the magneticabrasive grains
increases. Additionally, the pressure excreted by themagnetic
abrasives decreases as the gap between the magnetic pole andthe
workpiece is increased, provided that the filling density of the
abrasivegrains in the gap remains constant (Figure 10.43).
10.5.3 Material Removal Rate and Surface FinishTypc and size of
gmiJ /s: The surface roughness decreases rapidly in thebeginning
then levels off to aconstant value. The increasein grain size
raises- . . . . - - - - . - J1 :: . , < \I~.\ 1 ; ' "1 : ,;:
"~_.~._ ._ .,. _ _ . -~.~ _ .. . . _ - -
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
36/42
334 F undamcntals of Machillillg P roccsses
Magnetic pole
Rotation +vibrationMagnetic abrasive particles
N@ 0-!r 'ressure, P
IWorkpieceI
,'~Lines of magnetic force
FIGURE 10.42Magnetic field distribution and magnctic force
acting on a magnctic abrasivc particle.
the surfacc roughness, as shown inFigure 10.44. The finishing
process can beimproved by mixing small-sized diamond abrasives with
irregular shapedlarge-sized ferromagnetic iron particles.M ixing
weigl1t percentugc of i ron panictes: As shown in Figure 10.45,
thereis an optimum value of mixing weight percentage of
ferromagneticparticles for obtaining the best surface finish and
the largestmachined depth.Magnetic flux density: As shown in Figure
10.46, an increase in themagnetic flux density and particle size
increases the machined depth. Itdecreases with increasing the
working clearance (Figure 10.47). Surface
Workingclearance
Magnetic flux densityFIGURE 10.43Effect of flux density and air
gap 011 the magnetic abrasive pressure.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
37/42
fv lodern Abrasioe Processes
(f)(f)(1)e..cO): : : : J2(1)uco't:: ::: J(f)
335
Grain size
Finishing timeFIGURE 10.44Effcct of finishing time and grail1
size 011the final surface roughness.
roughness improves with magnetic flux density and finishing
time(Figure W.48).10.5.4 ApplicationsPolsli/lg of balls and rol
ler: Recently, MAF development involves the useof magnetic field to
support abrasive slurries in polishing ceramic ballsand bearing
rollers. A magnetic field, containing abrasive grains andcxtrernely
fine ferromagnetic particles in a certain fluid such as water
orkerosene, fills thechamber within a guide ring. The abrasive
grains,
(f)( f ) . . caJ-eQ...c aJ0)-0::::J -o2 ~(1) .-u..cco u't:
co::::J~(f)
Depth
Roughness
Mixing weight percentage of iron particlesFIGURE 10.45Effect of
mixing wcight pcrccntugc 011the machined depth and surface.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
38/42
33 FU l/dl1/ I lt'l/tn ls o / Mnc / il /il/g Pr o cesscs
s:.(J)-o-oQ)e.r:.uC1l
Iron particle diameter
Magnetic flux densityFIGURE 10.46Effect of 1ll.1gndic flux
dl'nsity and iron partick- di.imotor on thc rnachincd dcpth.
cerarnic balls, and the float (made from non-rnagnetic material)
aresuspended by the magnetic forces. The balls are preset against
the rotatingdrive shaft and are polished by the rnechanical
abrasion action. Bccausethe forces applied by thc abrasivo grains
are extrcrnely small andcontrollable. the polishing action is very
fine. The proeess is econornicaland the surfaces produced have
little or no defeets.Fillis/il1g inner-i ubc surfaccs: A sehematie
view for the interna] finishingof non-ferromagnetie tubes using MAF
operation is shown in Figure 10.49.
s:.Q)-o-o(J)es:uC 1l
Iron particle diameter
7 -Working clearance
FIGURE 10.47Eff("d 01' working clearance and iron particle
diameter 011 the machined depth.
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
39/42
Mudan Abrnsii P rocessce
(/)(/)QJe.cOl:: : : l2QJro't:: :J(J)
337
Magnetic flux density
Finishing timeFIGURE 10.411Efcct of fini;-,hing time and grain
si:: on the final surface roughness.
The magnetic abrasives inside the tubes are converged towards
the finishingzone by the magnetic ficld, generating the magnetic
force needed forfinishing. By rotating the tube at higher speed,
the magnetic abrasives makethe inner surface srnoother. Figure
10.50 shows the finishing of aferrornagnetic tube where the
magnetic fluxes flow into the tube (insteadof through the inside of
the tube) due to their high magnetic permeability.Under such
conditions, thc abrasives remain in the finishing zone when thetube
is rotated.
Vibrations 0oMagnetic abrasives
Coil De source
Yoke
PaleLine of magnetic forceNon-ferromagnetic tube
RotationFIGURE 10.49M
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
40/42
338 Fundamcnmts of Mnch ill il l~ Proccsscs,
DC source
Pole
Coil
s YokePole
Vibrations ~0Magnetic abrasives
RotationFIGURE 10.50M ilgnetic fin ishi ng of magnctic tubos. (F
rorn Y . 1-1torn i and T Sh in iIIImil, M l I g uct ic abra-ne
. f i l / i ; ; / / i l / g of inucr surt / t" s of t ubr,
lntcrnational symposium for electro machiniru;
(lSEM-XI),Switzerland. pp. ';i{l-i)911, 1995.)
10.6 Problems1. A cylind rical imprcssion of diarncter 10mrn and
depth 3 Illlll is to
be machined by USM in tungsten carbide. lf the feed force is
6N,the average diametcr of thc grains in thc abrasivo slurry is 10
~J1I,the tool oscillation arnplitude is 30 um. and the frequency
is20 kHz. The slurry contains one part of abrasives to about
onepart of water. The fracture hardness of the tungsten
carbideworkpiece is 7000 N /Illlll= and that of the copper tool
is1500N /mm=. Calculate the rnachining time. Assurnc k1=.3,k2
=1.8mrrr'. and k3== 0.6 .
2. A sguare througb boje 5X 5mm is to be ultrasonically
machinedin a tungsten carbide plate of 4mm thickness. The slurry is
madeof one part of 10 ~LJ nB.tC abrasives in one part of water. If
the feedforce is 5 N, thc tooJ oscillates at amplitudc of 15 um
andfrequency of 25 kHz. Assuming that only 75'1" of pulses
areeffective. calcula te the machining time. The fracture hardness
oftungsten carbide workpiece is 7000 N/ mm'' and that of the
coppertool is I5DON /mm=. Calcula te the machining time taking
k1=0.3,k2 =1.8mrrr'. and k3 =0.6.
3. Estmate the machining time required to machine a hole in
We,5mm thick. The grits are 20 um radi US, static stress is 15N/
mm''.the oscillation amplitude 35 um. and the machine operates
alfrequency of 25,000 cps. The compressive fracture strength of
WC
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
41/42
Modern Abrnsive P rocesses
ti
is 2270N /jnrrr'. What would be the volumetric removal rate if
theshape is a square 4X4 mm".4. During abrasive jet machining, the
mixing ratio was 0.3. Calculatethe mass ratio if the ratio of the
density of the abrasives anddensity of the carrier is 20.5. In AJM,
if the nozzle diameter is 1.0mm and jet velocity is200mis,
calculate the flow rate cm3/s of the carrier gas andabrasive
mixture.
10.7 Review Questionsl. Explain how the material is removed in
USM.2. What is the function of the abrasive slurry in USM?3. Show
diagrammatically the main elements of aUSM machine.4. Explain the
advantages and disadvantages of USM.5. A series of 5mm holes are to
be drilled in aglass workpiece. Selectasuitable machining method.
What are the variables that affect thefinal hole quality?6. Show
diagrammatically RUM and USM contouring7. What are the rnain
applications of USM?8. Explain the effect of USM parameters on the
removal rateo9. What are the reasons behind errors in parts
machined by USM?10. Sketch the machining arrangernent in AJM.11.
Explain the rnain factors that affect the AJM removal rateo12. Show
some applications for AJM.13. Show the main parts of the machining
system in AWJM.14. Explain the effect of AWJM parameters on the
removed depth framthe workpiece.15. Explain, using a simple
diagram, how AFM is performed."1 6 . Explain the effect of AFM
pararneters on diarnetral increase.17. Explain how the material is
removed in MAF operation.18. Explain the effect of MAF parameters
on the surface roughness andremoved depth.19. Describe some MAF
applications.20. Compare AJM, AFM, and AWJM processes with respect
toprincipIesof material rernoval, applications, advantages, and
limitations.
339
-
7/28/2019 9. El-Hofy Fundamentals of Machining Processes Tema
10
42/42
34 0 Fundamentals of Machining P rocesses21. Mark true (T) or
false (F):
(a) The volurne of material removal in USM is directly related
tothe frequency.(b) AFM canbeused to reduce thediameter of amild
steel rod fram14to 12mm.(c) Stiffmedia are used for radiusing parts
by AFM.(d) AWJM can be used to cut composite materials.(e) Material
removal rate in AJM isgreater than that in AWJM.(f) A heat-affected
layer of 0.5um is left after AFM.(g) In USM, for the sarne static
load, the larger the tool diarneter, thegreater will be the
penetration rateo