Embed Size (px)
Citation preview

How an Induction Motor Works by Equations (and Physics)
The magnetic field in the air gap from the voltage applied to the stator: The stator has three sets of
windings that are aligned at 120 degrees to each other and are driven by balanced currents that are 120
degrees out of phase.. Call the coils A, B, C and we will work in cylindrical coordinates. (See figure be‐
low.) The coils are wound in such a way as to generate a field that is a rough stepwise approximation to
a cos( ) distribution. The windings overlap and each winding slot has two windings in it usually from
different phases. (See 4 and 6 pole distributions on the handout from class.) Here I assume a two pole
distribution because it makes the explanation easier. Such a motor runs at the nominal speed range of
3500 – 3580 RPM.
10 0 2cos( ) cos( ) cos( ) cos( )AB B t r B t t r
2 2 410 03 3 2 3cos( ) cos( ) [cos( ) cos( )]BB B t r B t t r
4 4 210 03 3 2 3cos( ) cos( ) [cos( ) cos( )]CB B t r B t t r
4 2102 3 3[3cos( ) cos( ) cos( ) cos( )]A B CB B B B B t t t t r
302 cos( )B B t r
Let and L R S be the angular velocities of the magnetic field (line frequency), rotor, and slip re‐
spectively. For convenience we assume that 0 at t = 0, which implies Rt and S L R .
The flux in the single‐turn coil on the rotor surface is
2 2
2 2
3 30 0 02 2cos( ) cos( ) 3 cos( )ROTOR PEAK L SB rl d B rl t d B rl t
The voltage in the loop is 03 sin( )ROTOR S S
dV B rl t
dt
The current in the loop is:
00 2 2 2 2
3 sin( ) sin( ) cos( )3
( ) ( )ROTOR S S R S S R S
R SLOOP R R R S R R S R
V B rl t R t L ti B rl
Z R jX R L R L
The B field at the leading edge of the rotor coil is:
3 30 02 2 2 2( ( )) cos( ) sin( )PEAK L SB B t r B t r

Induction Motor Equations ENGN1931F – Spring 2015
2
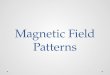
In this figure, all rotations are counterclockwise. The Cartesian coordinates have the z‐axis or k point‐
ing out of the page. The system is in cylindrical coordinates if one uses the radius and angle theta as
coordinates in the plane with unit vectors and r .
i
X
XX
STATOR
X
X
- rotor angle
XX
ROTOR
- magnetic field
angle
rj
Single turn rotor coil
X
X
Coil A – stepwise approximation
to cos( ) field distribution

Induction Motor Equations ENGN1931F – Spring 2015
3
Also at the leading edge of the rotor coil, the positive sign on the voltage implies that the current is out
of the page along the k axis and therefore the force on the wire from the Lorenz force law is in the
k r direction. The rotor is being pushed in the direction of the rotation of the stator magnetic
field. This is the essence of how the motor works! The total torque from both sides of the loop is then:
2
2 2 20 2 2 2 2
sin ( ) cos( )sin( )9
( ) ( )R S S R S S
SR S R R S R
R t L t tT B r l k
R L R L
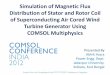
The first term in 2 12sin ( ) 1 cos(2 )S St t gives a net positive average torque but it has 100 % vari‐
ation in magnitude from no torque to twice the average torque at twice the slip frequency. The second
term has no net average torque but would also represent vibration at twice the slip frequency. Here is a
graph showing the two terms and their sum. (The slip frequency is very low so this would be really bad
vibration.)
Figure 1: Relative torque as a function of slip angle ( St ) for a single rotor loop and for two loops at
right angle to each other. Net torque from current in phase with the induced voltage and torque
component with not net torque, just vibration, from current at 90 deg. phase angle.

Induction Motor Equations ENGN1931F – Spring 2015
4
Suppose, however, we add a second coil at right angle to the first. The current in that loop will result in
a simultaneous torque that has the same functional form but with all angular arguments moved back by
2 radians. Use the trigonometric identities that 2sin( ) cos( )S St t and
2cos( ) sin( )S St t to get the total torque of the two turns as:
2 22 2 2 00 2 2 2
9 29
( ) / 1 (2 )SR
SR S R R S R
B r l fRT B r l k k
R L R l f
where /R R RL R is the rotor time constant. This is a constant torque as shown on the median line in
Fig. 1. There are two equivalent forms of the torque expression here. The first is the result of simple
substitution. The second expression has been rewritten to emphasize how the torque and hence power
depends on several properties of the system. It is directly proportional to the square of the stator field
0B (more field induces more current and the torque is a product of field and current), to the volume of
the rotor (larger motors, more torque), and to the slip frequency. No slip, no torque because there will
be no current in the rotor cage.
Figure 2 shows an evaluation of this torque expression for a 4‐pole motor with 0.09R seconds. The
curve has been normalized to unit peak value to show the relation between torque and shaft speed.
Mechanical power is the product of torque with angular velocity and a similarly normalized power curve
is superposed. Small motors are sometimes built as single phase induction‐run motors and these have
no starting torque and have rather less torque for a given stator B‐field. (You do an experiment on one
of these.)
Obviously, one can increase the torque by adding more loops in pairs until reaching a limit set by the
ability to get rid of heat. (The rotor cage has non‐zero resistance and that means joule heating anytime
there is rotor current, that is, anytime there is non‐zero torque.) The torque and output power increase
directly proportional to the number of pairs of loops. Connecting all the ends of the axial rotor wires by
a heavy ring of conductor does not influence the resulting operation very much, so motors generally
have a cage‐like structure for the loops in which the induced current flows. (Very large motors some‐
times have a portion of their rotor windings connected through brushes so there can be external control
of the amount of the effective resistance. This helps control startup current.)
There is an odd subtle feature of the heat problem in that the rotor resistance changes very rapidly with
temperature, increasing by 25 % for a 50 deg. C rise which is typical of rated operation. This is a similar
percent change in the rotor time constant and a readily observable variation in the torque‐speed curve
during warmup.
So far we have assumed that the stator field is uninfluenced by the currents in the rotor cage but that
clearly cannot be true. The energy for the rotor has to come from the power mains and that can only
happen by changing the fields in the stator. The rotor currents create magnetic fields that add to the
stator field both in the air gap and throughout the rotor and stator structure. Returning to our two‐loop

Induction Motor Equations ENGN1931F – Spring 2015
5
Figure 2: Relative torque versus speed of rotation for a 4‐pole 3‐phase induction motor having a rotor
time constant of 0.09 sec. Power is the product of torque and speed of rotation so vanishes at locked
rotor. Single phase, induction‐run motors make less efficient use of the stator B‐field so have less
torque for the same excitation MMF.
model, notice that the first term in the current in each of the two loop equations is what does all the
work, that is, the term responsible for the net torque, is 1 sin( )R si t for the first loop. Similarly, the
current in the second loop is 2 cos( )R si t . These currents produce magnetic fields in the gap that
are fixed relative to the rotor itself because that is what the coils are attached to. Their fields are radial
in the air gap and 90 degrees rotated relative to each other. The sine and cosine dependence on time
means that the sum expresses a radial vector field that rotates relative to the rotor at the slip frequency
in the same direction as the rotor is moving.
The shape of this field is not altogether obvious. Consider a snapshot of the field around the rotor from
the current in one of our two loops. The field at that instant is uniform, that is, constant with angle, on

Induction Motor Equations ENGN1931F – Spring 2015
6
each side of the loop, whether or not the loop is inset into a slot in the rotor. If the current in the rotor
were constant, the voltage it would induce in a stator coil would be a square wave. With two rotor loops
there are two overlapping rectangular field shapes that are weighted by the time functions sin( )st
and cos( )st , Figure 3 below shows a series of snapshots of the field going counterclockwise around the
rotor from one side of one coil at several successive times corresponding to changes in the slip angle
St . The fields are still constant for appreciable segments of the rotor and do not resemble sinusoids.
However, what should be clear is that the entire pattern changes continuously in a way that shows CCW
rotation (increasing angle about the rotor) at the slip frequency. Because these fields are rotating rela‐
tive to the rotor which is turning at the rotor angular frequency, they are rotating at
R S L in the stator or room reference coordinates.
Figure 3: Circumferential B‐field about the rotor from the slip frequency currents induced in a pair of
current loops around the rotor. The results do not depend on whether the loops are inset into rotor
slots or not. The direction of rotation of the fields is increasing angle about the rotor or CCW.
If another pair of coils is added at right angles to each other and at 45 degrees to the first pair, then
snapshots of the field pattern look like Figures 4 and 5. Adding the second pair of rotor loops makes a

Induction Motor Equations ENGN1931F – Spring 2015
7
field pattern that is a stepwise approximation to a triangle wave. As more pairs are added, the approxi‐
mation gets better and better. The same twist in the rotor cage used to smooth the effects of the stator
winding slot on the rotor field will similarly help smooth the effect of the steps in the rotor field.
In the stator reference frame this field is moving at the line frequency rate, the same angular rate as the
stator‐induced magnetic field. From the point of view of the stator windings, there is a single magnetic
field, the sum of sinusoidal and triangle components, rotating in the air gap that generates voltages in
the stator windings that must match the applied line voltages. The rotor field is opposite in sign to the
stator‐induced field so it tends to reduce that field. This reduces the voltage induced in the stator coils
but those coils are connected to the line voltages and instead of decreasing the voltage, the stator cur‐
rent will increase to generate enough total flux. The increase in current is in phase with the line voltage
and supplies the energy both for joule heating the rotor and supplying the mechanical energy. The ac‐
tion is exactly analogous to the operation of a transformer, suggesting that we might model the motor
with a transformer equivalent circuit and use an energy analysis to determine how the motor will be‐
have from the power applied to it.
Figure 4: Shape of the circumferential B‐field around the rotor from a set of 4 rotor coils equally
spaced around the rotor. Only the fields for slip angle ( St ) of zero and 180 degrees are shown for
clarity. This is a stepwise approximation of a triangle wave and the more loops are added, the better
the approximation.

Induction Motor Equations ENGN1931F – Spring 2015
8
Figure 5: Shape of the circumferential B‐field around the rotor from a set of 4 rotor coils equally
spaced around the rotor. Shows 45 deg. increments of slip angle ( St ).
Another consequence of the triangle shape of the rotor B‐field is that the stator current has harmonic
components even though the line voltage is nearly pure sinusoid. A triangle wave has only odd harmon‐
ics but one can show that in a 3‐phase system, the motor cannot induce winding currents at harmonics
that are a multiple of 3 times the line frequency. Figure 6 shows a triangle wave overlaid by its Fourier
series representation with components out to 27 times the fundamental frequency. One cannot see the
difference. However, if the 3, 6, 9,… harmonics are removed, a bent sinusoid with only about 6 % total
harmonic distortion is formed. The figure compares the triangle voltage to both the waveshape of its
induced currents and a pure sinusoid at the fundamental.
The harmonic currents in the power lines do not, in principle, draw net power from the mains but they
do generally increase losses in the mains and in the motor. They are undesirable and much design effort
goes into optimizing the stator winding design both to do its fundamental task of creating the sinusoidal
stator fields and to minimize the response of the stator to the non‐sinusoidal induced currents from the
rotor under load.

Induction Motor Equations ENGN1931F – Spring 2015
9
So far, all analysis has been based on placing the rotor coils on the surface of the rotor to make it possi‐
ble to use the Lorenz force law. When the turns are sunk into slots in the rotor, the wires themselves do
not have to sustain the full force of the torque and are much easier to secure to the rotor itself. As with
the DC motor we do not expect the general result to change very much, at least qualitatively. To make
calculation easier we will develop a suitable transformer model of the motor from which we can simu‐
late the line current, and the torque and efficiency from energy arguments.
Figure 6: A triangle wave of the same form as B‐field on the perimeter of the rotor and its Fourier se‐
ries representation. The voltage and current induced in the stator cannot contain harmonics at multi‐
ples of 3 times the line frequency. The second curve shows the result of removing those harmonics
from the series while the third curve shows the fundamental component for comparison with a pure
sinusoidal waveform.
A formal approach to solving for the steady state currents and power in a motor begins with the obser‐
vations that:
At rest a motor with two rotor turns is a transformer with 5 coils, two of them shorted.
The self‐inductances of the windings are independent of the rotor position

Induction Motor Equations ENGN1931F – Spring 2015
10
The mutual inductances of stator to rotor windings are proportional to the sine or cosine of
the rotor angle relative to the magnetic axes of the stator coils.
All stator windings have one resistance and all rotor windings a different resistance that is the
same for all loops.
Flux induced in a coil is M PRML i and therefore the induced voltage is
( )M PRM
dv L i
dt where PRMi is the current in the inducing coil. (Note: the usual formula for
the voltage in a transformer or even a single coil follows from this if the inductance is inde‐
pendent of time but that is not the case for a motor.)
With these observations, the steady state equations for a motor with two rotor turns become:
2 23 3
4 43 3
2 43 31
2
cos( ) sin( )
cos( ) sin( )
cos( ) sin( )
cos( ) cos( ) cos( ) 00
sin( ) sin(0
A P M M MR R MR R
B M P M MR R MR R
M M P MR R MR RC
MR R MR R MR R RR
MR R MR RR
v L L L L t L t
v L L L L t L td
L L L L t L tvdt
L t L t L t Lv
L t Lv
2 43 3
1 1
2 2
) sin( ) 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
MR R R
A AW
B BW
C CW
RR R
RR R
t L t L
i iR
i iR
i iR
Ri i
Ri i
This set of equations does not include core losses. Its solution, while straightforward, is a lengthy exer‐
cise in trigonometry and is not very instructive. It does predict that all line currents are at line frequency
and all rotor currents at the slip frequency. It further predicts that the instantaneous power delivered to
the system for both resistive losses and mechanical power is constant as we found from the Lorenz force
argument. This is characteristic of all three‐phase systems with balanced constant impedance loads and
hence balanced currents.
However, if what we want is the steady‐state solution to how electrical power, both current and volt‐
age, relates to mechanical energy, efficiency, slip, torque, etc. then a simple alternate approach is possi‐
ble. While a motor is essentially a multi‐winding transformer with some mutual inductances dependent
on the rotor position, having pairs of rotor loops at right angles to each other compensates for the posi‐
tion dependence in steady state. In that case we can use a simple time‐independent transformer model
on a per‐phase basis. Full power is simply three times the per‐phase power.

Induction Motor Equations ENGN1931F – Spring 2015
11
The first thing that a per‐phase model has to account for is the stator‐generated magnetic field from
that phase. In the transformer model this is the primary inductance and the corresponding primary
magnetizing current. The top circuit of Figure 7 shows this part of the model. It corresponds to operat‐
ing the motor with zero slip, i.e., driving the motor at the line rate so there is no induced current. The
model incorporates both core and winding losses. It differs from the simple transformer model only in
having somewhat higher leakage inductance relative to LPRM than most regular transformers. This is be‐
cause of the larger air gap and the design of the stator winding slots. (To help control inrush current on
startup, slots are sometimes designed to introduce more than the minimum leakage inductance.) The
model parameters of a real motor can be extrapolated from the free running motor impedance and a
light load measurement.
The middle circuit in Fig. 7 shows the circuit for the motor under load with the rotor impedance coupled
to the primary stator winding through and ideal transformer of unknown turns ratio. While we know
the rotor impedance, ZROTOR, is a function of the slip speed, we do not know its magnitude or functional
form. Rather than deal with two unknowns, we eliminate the ideal transformer from the model by re‐
ferring ZROTOR to the primary side as in the bottom section of Fig. 7.
To justify the LR model for the rotor impedance of Figure 7, consider the equation that we derived for
the current in a single rotor loop: 1 0 2 2 2 2
sin( ) cos( )3
( ) ( )R S S R S
R SR S R R S R
R t L ti B rl
R L R L
. By the design of the
rotor cage, there is a second loop at right angle to this one with a current that lags this by 90 degrees,
that is, has a current: 1 0 2 2 2 2
cos( ) sin( )3
( ) ( )R S S R S
R SR S R R S R
R t L ti B rl
R L R L
. On the primary side of the
transformer these two currents are scaled by the same factor and are added together. The RMS value
of the sum is proportional to:
2 21 2 2 2 2 2
[( (cos( ) sin( )) (sin( ) cos( ))]( ) ( )
S SR R R S S S R S S
R S R R S R
i i R t t L t tR L R L
where we have used the relations that 2 2sin ( ) cos ( ) 1S St t and the time average of any term that
is the product of a cosine times a sine is zero. With a little further manipulation the RMS current in the
rotor branch of Figure 7 can be written as:
_2 2
where
1 ( ) 1 ( )/
S SLRMS ROTOR
LR R RR S L
R R
I SL R L
RR S R S
.

Induction Motor Equations ENGN1931F – Spring 2015
12
Figure 7: Electrical equivalent circuits for one of the three phase branches of the motor. At top is the
stator excitation equivalent to the stator alone when the rotor is turning at the line frequency. In the
middle is the standard transformer model with the rotor inductance and equivalent load resistance.
Bottom shows the rotor circuit impedance transformed to the primary side and broken into two load
resistances to separate the mechanical energy from the joule heating of the rotor cage.
cos( )LINE P LV V t
RS LS‐LEAK
RCORE
LPRM
cos( )LINE P LV V t
RS LS‐LEAK
RCORE LPRM
1 ROTORS R
S
ROTORL
ROTORR
cos( )LINE P LV V t
RS LS‐LEAK
RCORE
LPRM
ROTORR
S
ZROTOR
LROTOR

Induction Motor Equations ENGN1931F – Spring 2015
13
This is the equation for the current in a series LR combination at the line frequency if the effective rotor
resistance depends on the normalized slip frequency S as RR
S
. In the bottom circuit of Fig. 7 this re‐
sistance is broken into two pieces, one that represents the loss in the rotor itself and one that repre‐
sents the mechanical energy.
To compute the power losses and mechanical energy, it is only necessary to find the resistive heat loss
of each of the model resistors, a trivial exercise for any circuit analysis program. The motor torque is
simply the mechanical power divided by the rotational speed of the rotor in radians per second. At
some minor loss of accuracy1 one can redraw the circuit as in Figure 8. This makes the calculations more
straightforward.
Figure 8: Approximate per‐phase model of an induction motor in steady state operation. Mechanical
power is the electrical energy dissipated in the S‐dependent resistance at the lower right of the dia‐
gram. Torque is power divided by the rotor angular velocity.
In this model, the core loss is constant as 2 /CORE LINE COREP V R . The rotor effective current IROTOR is giv‐
en by 2
2
LINEROTOR
RS TOTAL
VI
RR X
S
where TOTALX is the sum of the inductive reactances of the
1 See Hughes, A., Electric Motors and Drives: Fundamentals, Types, and Applications, Newnes Elsevier, 2006, pp.
267‐274 for a discussion of this result.
cos( )LINE P LV V t
RS
RCORE LPRM
1 ROTORS R
S
_ROTOR STATORL L
ROTORR
ROTORI

Induction Motor Equations ENGN1931F – Spring 2015
14
stator leakage inductance and the rotor leakage inductance referred to the line input. The mechanical
power is 22
2
2
1 /1 / LINE R
MECH ROTOR R
RS TOTAL
V S R SP I S R S
RR X
S
and torque is 2
2
2
MECH LINE R
R LR
S TOTAL
P V RT
SRR X
S
. Since S is slip frequency normalized to the
line frequency, this expression is very similar to the torque expression found above for the case of fixed
B0 and rotor turns subject to Lorenz law forces. It incorporates the effects of non‐zero values of stator
leakage inductance and stator winding resistance.












![High-speed Electrical Machine with Radial Magnetic Flux and Stator Core … · 2018. 8. 2. · EMs [13,14]. The sectional stator magnetic core technology is also used for the radial](https://img.pdfslide.net/doc/110x75/5ff6f9b4cf067f6834373dc5/high-speed-electrical-machine-with-radial-magnetic-flux-and-stator-core-2018-8.jpg)