-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
1/16
A biologically-inspired clustering protocol for wireless sensor
networks
S. Selvakennedy a,*, S. Sinnappan b, Yi Shang c
a School of Information Technologies J12, University of Sydney,
NSW 2006, Australiab School of Economics & Information Systems,
University of Wollongong, Wollongong, NSW 2522, Australia
c Department of Computer Science, University of
Missouri-Columbia, Columbia, MO 65211, USA
Available online 15 June 2007
Abstract
Lately, wireless sensor networks are garnering a lot of
interests, as it is feasible to deploy them in many ad hoc
scenarios such as forearthquake monitoring, tsunami monitoring and
battlefield surveillance. As sensor nodes may be deployed in
hostile areas, these battery-powered nodes are mostly expected to
operate for a relatively long period. Clustering is an approach
actively pursued by many groups inrealizing more scalable data
gathering and routing. However, it is rather challenging to form an
appropriate number of clusters with wellbalanced memberships. To
this end, we propose a novel application of collective social
agents to guide the formation of these clusters. Inorder to counter
the usual problems of such meta-heuristics, we propose a novel
atypical application that allows our protocol to convergefast with
very limited overhead. An analysis is performed to determine the
optimal number of clusters necessary to achieve the highestenergy
efficiency. In order to allow for a realistic evaluation, a
comprehensive simulator involving critical components of the
communi-cation stack is used. Our protocol is found to ensure a
good distribution of clusterheads through a totally distributed
approach. To quan-tify certain clustering properties, we also
introduced two fitness metrics that could be used to benchmark
different clustering algorithms.Crown copyright 2007 Published by
Elsevier B.V. All rights reserved.
Keywords: Clustering; Routing; Biologically-inspired;
Meta-heuristic; Simulations
1. Introduction
Wireless sensor technology is evolving rather rapidly invarious
aspects, as it draws significant interests from differ-ent research
communities such as wireless networking,embedded system, database,
data mining and distributedcomputing groups. For instance, in terms
of the sensornode hardware, the Mica2 mote has roughly eight
timesthe memory and communication bandwidth as its prede-
cessor, the Rene mote, developed in 1999 for the samepower
budget [1]. These sensor nodes coupled with wirelesscommunication
capability have found use in many applica-tions such as earthquake
monitoring, target tracking andsurveillance, structural monitoring
and precision agricul-ture. The nodes are typically stationary due
to their uniqueapplication needs, substantially more resource
constrainedand more densely deployed than mobile ad hoc
networks
(MANETs). Even though, there have been significantadvances in
recent years to improve wireless sensor nodescapabilities, more
energy-efficient solutions are requiredwithin the communication
stack and middleware for theconservation of the battery power. As
the entire wirelesssensor network (WSN) utility relies on its
useful lifetime,these solutions however might come at the tradeoff
againstthe traditional performance measures such as packet
deliv-ery ratio, mean latency and throughput. Within the com-
munication stack, an approach that is likely to succeed inthis
regard is the use of a hierarchical structure for routing[2,3].
Clustering with data aggregation is an important tech-nique in
this direction, and it makes the tradeoff betweenenergy efficiency
and data resolution. Even though manyprotocols have been proposed
in the literature to minimizeenergy dissipation on the forwarding
paths, some nodesmay still be drained quickly. By employing a
dynamic clus-tering technique, these nodes could lose their
popularity ascertain roles are rotated dynamically [3]. Various
clustering
0140-3664/$ - see front matter Crown copyright 2007 Published by
Elsevier B.V. All rights reserved.
doi:10.1016/j.comcom.2007.05.010
* Corresponding author. Tel.: +61 2 9351 4494.E-mail address:
[email protected] (S. Selvakennedy).
www.elsevier.com/locate/comcom
Computer Communications 30 (2007) 27862801
mailto:[email protected]:[email protected]
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
2/16
techniques in different context have been proposed.
Mostalgorithms aim at generating the minimum number of clus-ters
and transmission distance. These algorithms also dis-tinguish
themselves by how the clusterheads (CHs) areelected.
Another important design issue to consider is network
reliability or robustness. Since the wireless medium andthe
sensor nodes themselves are considered less reliable rel-ative to
the wired technology and its tethered nodes, adopt-ing a
deterministic approach in the solution design, andassuming only
average case performance would be disas-trous in practice. To this
end, social insect swarm behaviormay provide an ideal model for the
design of such less con-trollable systems. To our knowledge, very
few researchershave considered or adopted such
biologically-inspiredapproaches for the WSN design. However, a
number ofrecent works has been based on different swarm behaviorsin
the design of routing protocols for MANETs. As thereare many
important similarities between these two ad hoc
technologies, we believe building on these knowledge maybe
useful for WSNs. Most of these swarm-based routingalgorithms are
simple yet robust as well as adaptive totopological changes.
However, such algorithms cannotestablish the shortest or
appropriate paths before a suffi-cient number of agents is flooded
[4].
In this paper, we propose to biologically inspire theclustering
approach, whereby the network is clusteredaround certain nodes
deemed biologically fit. A prelimin-ary version of this algorithm
is introduced in [5]. Accord-ing to this approach, when a node has
a special agent, itself-elects itself to become a CH. Such election
obviates
the need to maintain many state variables. A fixed numberof such
agents (i.e. in biological term, the swarm size) areused to ensure
that a certain number of clusters areformed throughout the network
useful life. This numberis derived analytically to minimize energy
dissipationthrough data aggregation. We derive the optimal numberof
clusters assuming a Voronoi tessellation incorporatingboth the
influence of intra- and inter-traffic. Based on thisoptimal number
and our approach of clustering, we couldguarantee that the network
always operates close to opti-mal once system convergence is
achieved. In addition, wecould ensure that the CHs are well
distributed across thenetwork to promote load balancing. Thus,
using thisapproach, we address a multi-objective optimization
prob-lem of energy efficiency and load balancing. To quantifythe
clustering properties, we also introduce two fitnessmetrics that
will be useful for comparing any clusteringalgorithms.
To the best of our knowledge, this is the first attempt toadapt
a biologically-inspired technique to the resource-starved device
class in a unique approach. To counter thegeneral problems of such
biologically-inspired meta-heuris-tics whereby they requires
significant number of agents anda long time for convergence, we
only adopt its certain use-ful features, and modify the mechanics
of the agents. The
main features that we still adopt are:
The notion of biological fitness of a solution; The use of a
collection of simple agents interacting
locally. Interaction is not achieved through explicit mes-sage
exchanges, but implicitly by leaving some simplestate at the
nodes.
In a typical swarm intelligence use, an agent has to bepresent
at an object (here, a node) to affect its biological fit-ness. In
our approach, an agent is allowed to influence evenfrom remote. We
demonstrate later how this unique adap-tation has reduced the need
for a large agent populationand also reduced the convergence time
in our atypicalapplication. Also, our dynamic clustering protocol
exhibitsfault-tolerance in the face of node failures
comparedagainst fixed or deterministic clustering approaches in
theliterature. Even when a node fails, this protocol could
stillachieve the desired properties of good CH distribution
andenergy efficiency.
The rest of the paper is organized as follows: Section 2
presents the perspective of this area of research.
Variousclustering and biologically-inspired algorithms proposedin
the literature are discussed there. The basic swarm prin-ciples are
presented in Section 3. In Section 4, the details ofour protocol
are described. The comprehensive simulatorused to experiment with
this algorithm is described in Sec-tion 5. Many different
experiments comparing our protocolagainst well-known proposals and
their correspondingresults are presented and analyzed in Section 6.
The mainfindings of this work are summarized in the final
sectionwith some directions for further work.
2. Related work
Intense research in the field of sensor network technol-ogy in
recent years has fueled further development inmicro-sensor
technology and low-power analog/digitalelectronics. Some of the
ongoing challenging issues facingresearchers are low-power signal
processing architecture,routing protocol and data gathering
strategy, data storageand indexing, data aggregation, low-power
security proto-col, and localization. It is realized that the
approach that islikely to succeed to provide a scalable and
energy-efficientsolution is of a hierarchical structure. To this
end, variousclustering algorithms have been proposed in different
con-text. Initially, these algorithms focused on the
connectivityproblem [68] but later energy-efficiency was more of
inter-est in wireless ad hoc and sensor networks [915].
However,almost all focuses on reducing the number of
clustersformed, which may not necessarily entail minimum
energydissipation.
Generally, clustering algorithms segment a network
intonon-overlapping clusters comprising a CH each. Non-CHnodes
transmit sensed data to CHs, where the sensed datacould be
aggregated as these signals could be sufficientlycorrelated due to
the nodes spatial proximity, and trans-mitted to the base-station
(aka the sink). Clustering algo-
rithms may be distinguished by the way the CHs are
S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801 2787
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
3/16
elected. The Linked Cluster Algorithm (LCA) [8] selects aCH
based on the highest id among all nodes within one-hop. This is
enhanced by LCA2 [16] that selects the nodewith the lowest id among
all nodes that is neither a CHnor is one-hop of the previously
selected CHs. In [17],the authors developed a similar distributed
algorithm to
LCA2, which identifies the CH by choosing the node withthe
highest degree. Other algorithms such as the Distrib-uted Cluster
Algorithm (DCA) [18] and Weighted Cluster-ing Algorithm (WCA) [19]
rely on weights to select CHs.
Load balancing heuristics are proposed in [10] and [20].In [20],
the proposed clustering algorithm is designed toensure each cluster
has equal number of nodes while keep-ing minimal distance between
nodes and their CH. Theseload-balanced algorithms focus mainly on
balancingthe intra-cluster traffic load without due consideration
tothe external traffic. The maxmin d-cluster algorithm isproposed
to achieve better load balancing among CHs aswell as to reduce the
number of CHs as compared to
LCA or LCA2 [11]. It generates d-hop clusters with arun-time of
O(d) rounds. In [12], some clustering algo-rithms are proposed to
maximize the network lifetime byvarying the cluster size and the
duration of a node beingnominated as a CH based on the assumption
that the loca-tions are known a priori. These algorithms ignore
inter-cluster traffic, and also need the recognition of the
wholenetwork topology, which may not be feasible in manycases. The
proposal in [21] incorporates the effect ofinter-cluster traffic in
the determination of the optimal sinkplacement that maximizes the
network topological lifetime.In [22], a fixed clustering algorithm
that performs energy
load balancing to improve network lifetime is proposed.It also
takes into consideration the interaction betweenclustering and
routing. Two schemes were introduced.The first scheme finds the
optimal cluster size and location,whereas the second allows a CH to
probabilistically chooseto either relay the traffic to the next-hop
or to deliver itdirectly to the sink. It assumes a heterogeneous
network,where the CH nodes have larger resources than the
others.
The Low-Energy Adaptive Clustering Hierarchy(LEACH) algorithm
[13] and its related extensions[14,15,23] use probabilistic
self-election, where each sensornode has a probability p of
becoming a CH in each round.It guarantees that every node becomes a
CH only once in 1/p rounds. Such role rotation aims to distribute
the energyusage for a more load-balanced operation. However,LEACH
assumes all nodes are able to reach the sinkdirectly, and requires
position knowledge to perform a pre-cise transceiver power control.
Some of these algorithmswere designed to generate stable clusters
in environmentswith mobile nodes. In a typical WSN, the sensor
nodesare stationary, and the instability of clusters due to
mobil-ity of these nodes may not be an issue. Drawing from
thewealth of clustering proposals for both MANETs andWSNs, The
Hybrid Energy-Efficient Distributed (HEED)clustering is proposed in
[3] to adopt real-valued weight-
based clustering. It uses residual energy as the primary
clustering parameter to probabilistically elect a numberof
tentative CHs, and then advertises to their neighborsof their
intentions to become CHs. Such messages includea secondary cost
measure that is a function of neighborproximity or cluster density.
This secondary cost is mainlyused to avoid elected CHs to be in
range of each other, and
to guide the regular nodes in choosing the best cluster to join.
This proposal is generally able to achieve a goodCH distribution
across the network.
Another crucial design aspect of WSNs to consider is thenetwork
reliability and fault-tolerance. It has been demon-strated in
different context that the collective behavior ofsocial insects has
many attractive features, not the leastrobustness and reliability
through redundancy. However,only a handful WSN proposals have been
inspired by nat-ure. Due to some parallels to MANETs, we will
considersome biologically-inspired algorithms proposed for
thisdomain. The first MANET routing algorithm based onthe
ant-colony principles is the Ant-colony-based Routing
Algorithm (ARA) [24] derived from AntNet [25], an algo-rithm for
wired networks. It exploited the pheromone layingbehavior of
ants.
Pheromone is a quality metric indicating the goodness ofa path.
Although pheromone evaporates over time, subse-quent ants leave
additional pheromone and thus reinforcethe path. Ants gradually
establish the shortest pathbetween food and their nest in a fully
distributed andautonomous manner. Ants are flooded towards
destina-tions while establishing the reverse paths to the
source.The fact of gradual decay of pheromone introduces a formof a
negative feedback to prevent old routes from remain-
ing in the forwarding tables when routes fall out of favorwith
ants. As the number of ants that completes journeysto food in a
given time is larger on a shorter path thanon a longer path, a
shorter path accumulates more phero-mone and attracts more ants.
The shortest paths becomepreferable, and most ants use them.
However, longer pathsare not entirely lost as some ants may still
maintain suchroutes. Routing schemes based on such ant-colony
behav-ior is both robust and adaptable. When the shortest routeis
lost due to some event, the longer routes provide alterna-tive
options.
Another MANET routing algorithm that inspired bytermite is
Termite [26]. In this approach, no exclusiveagents are used though,
as the agents are piggybacked ontodata packets. These packets
follow the pheromone trail fortheir destinations, and leave new
pheromone for theirsources. In [27], routing is established based
on a swarmof different types of honeybees. This algorithm,
termedBeeAdHoc, is a hybrid routing approach where it couldeither
be proactive or reactive. It is shown that BeeAdHocachieves better
energy savings while still maintaining per-formance in terms of the
traditional metrics against DSR,AODV and DSDV.
As the number of nodes grows, the number of agentsrequired to
establish the routing infrastructure may
explode. A way to overcome the overhead explosion and
2788 S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
4/16
attain scalability is by using the hierarchical routingapproach.
For MANETs, an adaptive Swarm-based Dis-tributed Routing
(adaptive-SDR) [28] and Mobile AntsBased Routing (MABR) [29] are
proposed, whereby bothschemes consider dividing the network into
small clusters/zones, and then perform intra- and inter-routing. To
our
knowledge, the only work to have considered swarm intelli-gence
in the wireless sensor context is [30]. They imple-mented a
distributed network of mobile sensor nodes andcontrolled the nodes
physical movements using swarm prin-ciples. It was demonstrated
that the swarm behavior couldbe used to ensure safe separation
between the agents andcoverage efficiency while enforcing a level
of cohesion thatmaintains a level of connectivity between the
mobile agents.These nodes however are less resource constrained
than typ-ical mote-class devices, and the overhead due the
swarmintelligence meta-heuristic was not a major concern there.
We propose the use of both a hierarchical structure andthe
biological inspiration to realize a scalable and robust
data routing strategy. To appreciate this integration, thebasic
principles of swarm intelligence are presented next,and then
followed by our proposed protocol.
3. Swarm principles
Swarms are useful in many optimization problems. Aswarm of
agents is used in a stochastic algorithm to obtainnear optimum
solutions to complex, non-linear optimiza-tion problems [31,32]. In
this work, we consider the useof a swarm of agents and its control
aspects. Swarm con-trol issues are important as the swarm behavior
could be
used to establish logical network topology. In the descrip-tion
of his boids model, Reynolds [33] presents the classicswarm control
theory. There are three basic controllingbehaviors that govern
movements of agents within theswarm. Kadrovach and Lamont [30] have
summarizedthese behaviors as shown in Table 1.
When agents migrate in a swarm, every agent mustensure that they
do not collide with one another. Also, inorder to ensure the best
survival of an agent, it should stayas close as possible to the
others. This implies that an agentshould match its velocity with
neighboring agents to keepabreast. Any swarm behavior is solely
based on locally
observable phenomena, and is reflected in Table 1 by
theadjective nearby. The integration of these behaviors resultsin a
stable swarm formation, where every agent is at leastsome minimum
distance from others. In social insects,many sophisticated
community behaviors emerge fromthe interaction of individuals where
each insect carriesout simple tasks. Some known collective
behaviors are for-
aging, nest construction, thermoregulation, brood sortingand
cemetery formation [34]. These collective behaviorsof social
insects have inspired computer scientists to repli-cate them as
they exhibits many attractive features, such asrobustness and
reliability through redundancy [4,34].
In this paper, we propose a biologically-inspired cluster-
ing protocol that uses a collection of agents. We exploit onthe
first two swarm principles, namely separation andalignment, through
pheromone control to achieve a stableand near uniform distribution
of the CH nodes. Moreover,it is observed in [35] that the algorithm
converges faster toan optimal or near optimal solution when
pheromone isalso reduced drastically from those elements that
makeup the worst solution in each iteration. Thus, subsequentants
are discouraged from returning to poorer solutionsseen in the past.
This constitutes the simplest way to imple-ment anti-pheromone
where the evaporation of pheromoneis simulated by a significant
reduction in existing phero-mone levels. The integrated use of
these separate compo-
nents as part of the proposal is described in-depth further.
4. The T-ANT protocol
Our main design goal is to consistently form an optimalnumber of
clusters with a good CH distribution for a load-balanced and energy
efficient network operation. Each reg-ular node is mapped to
exactly one cluster. Accordingly, weenumerate the requirements for
the proposed designstrategy:
1. The protocol should be completely distributed. Each
node only makes a local decision on its role.2. The CH election
should be completed in constant time.3. The protocol should be
efficient in terms of processing
complexity and message exchange.4. The elected CHs should be
well distributed.
4.1. Overview of the T-ANT protocol
As T-ANT is a dynamic clustering protocol, its opera-tion is
divided into rounds. Each round comprises a clustersetup phase and
a steady state phase. A number of timersare utilized to control the
operations for optimal perfor-mance. However, if time
synchronization is absent, thisprotocol will still function albeit
at suboptimal perfor-mance. During the cluster setup phase, CHs are
electedand clusters are formed around them. To avoid the
main-tenance of many state variables as in many current cluster-ing
proposals, we utilize social agents in a unique way tocontrol CH
election. (Just for simplicity of reference, weterm them ants;
these ants however do not behave as antsin the ant-colony
optimization technique.) A node with anant becomes a CH, whereas
the others would choose to jointhe best cluster in range. As we
reveal further, ourapproach represents an atypical use of the swarm
intelli-
gence approach. During the steady state phase, the cyclic
Table 1Agent behaviors in a swarm
Behavior Description
Separation Avoid collisions with nearby agents.Alignment Attempt
to match velocity with nearby agents.
Cohesion Attempt to stay close to nearby agents.
S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801 2789
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
5/16
process of data collection from members, data aggregationand
transfer to the sink occurs at fixed intervals. Since antsplay a
critical role in this protocol, we need to determine anappropriate
swarm size and the way they are introducedinto the network. This
issue is addressed through the antrelease component used during
network initialization.
The details of all aspects of the protocol are
individuallydescribed further with appropriate analyses
wherenecessary.
4.2. The ant release component
During network initialization, the sink releases a fixednumber
of ants (i.e. control messages) into the network.When the sink
releases an ant, it chooses one of its neigh-bors at random. The
ant makes a random walk into thenetwork as deep as restricted by
its time-to-live (TTL)value. Assuming the terrain is a square M M
and nodeswith radio range r, TTL is initially fixed at
dM= ffiffiffi2p re. Thisrepresents half of the diagonal terrain
length (in hops) to
facilitate the ants to wander away from each other. Toavoid
attraction between ants, they do not leave any pher-omone trail at
this stage. Before releasing the next ant, thesink waits for a time
proportional to one-hop delay (s) anda random offset to ensure its
subsequent transmission doesnot self-interfere. When an ant arrives
at a node, the nextstop is again randomly chosen (excluding the
sender) ifTTL has not expired. If TTL expires, the ant remains
atthis node. However, if the final ant location overlaps
withanother ant, the latter ant must find another
location.Algorithm 1 summarizes this initialization phase.
Beyond
this initialization phase, ants only migrate in single-hopsat
the start of each round (i.e. TTL = 1).
Algorithm 1. The Ant Release Protocol
Sink:Repeat
Choose a random neighbor (node i) to release an ant
Send the ant to node i
Wait for s(1 + rand), where 0 < r and< 1Until all ants are
released
Other nodes:If an ant wanders to node i
Decrement its TTL
If TTL > 0Choose a random neighbor, j
Send the ant to node j
ElseIf TTL == 0 and node i already has an antPick a random
neighbor
Send the ant to it
Else
Store the ant
End
End
Deciding on the appropriate swarm size is crucial for T-ANTs
optimal performance. The analysis goal here is toorganize nodes
into clusters for optimal data aggregationto minimize overall
energy dissipation. Towards this end,an analysis to determine the
appropriate swarm size is per-formed. The following assumptions are
made for this
analysis:
The nodes are randomly scattered in a two-dimensionalplane and
follows a homogeneous spatial Poisson pro-cess with k intensity
[15].
All nodes in the network are homogeneous with radiorange r.
The communication from each node follows isotropicpropagation
model.
The energy needed for the transmission of one bit ofdata from
node u to node v is the same as to transmitfrom v to u (i.e. a
symmetric channel).
The sink is located the center of the terrain (an
alternatederivation is indicated for corner locations).
The overall idea of the derivation of this optimal
systemparameter value is to define a function for the energy usedin
the network to disseminate information to the sink.
As per the assumptions, the nodes are distributedaccording to a
homogeneous spatial Poisson process. Thenumber of nodes in a square
area of side M is a Poissonrandom variable, Nwith mean kA where A =
M M. Letsassume that for a particular realization of the process,
thereare n nodes in this area. If a node requires an ant to becomea
CH (the details of CH election is explained in the next
subsection), and there are p% ants as to the number ofnodes,
there will be np nodes elected as CHs. Also, theCHs and regular
nodes are distributed as per independenthomogeneous spatial Poisson
processes P1 and P0 of inten-sity k1 = pk and k0 = (1 pk),
respectively.
Using the ideas in stochastic geometry, each node joinsthe
cluster of the closest CH to form a Voronoi tessellation[36]. The
plane divides into zones called Voronoi cells, witheach cell
corresponding to a P1 process point termed itsnucleus. IfNv is the
random variable representing the num-ber of P0 process points in
each Voronoi cell and Lv is thetotal length of all segments
connecting the P0 process
points to the nucleus in a Voronoi cell, then based on
theresults in [23]:
ENvjN n % ENv k0k1
1 pp
1
ELvjN n % ELv k02k
321
1 p2p
32
ffiffiffik
p 2
Now, to derive the energy dissipation, the free space (d2
path loss) channel model is used. [For other path loss
expo-nents (i.e. 36), it follows a similar derivation, and has
aconstant effect on the optimal number of CHs.] To transmitan l-bit
packet a distance r (i.e. its radio range), the radio
expends:
2790 S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
6/16
ETxl; d lEelec lefsr2 3
where Eelec is the electronic energy that depends on factorslike
digital coding, modulation, filtering and spreading ofthe signal,
and efsr
2 is the amplifier energy that dependson the distance and the
acceptable bit-error rate. As to re-
ceive a packet, the radio expends:
ERxl; d lEelec 4
The T-ANT protocol guarantees that the number of clus-ters per
round is always np. The dissipated energy by thenodes can be
analytically estimated using the computa-tion and communication
energy models. Each CH dissi-pates energy receiving signals from
its members,aggregating the signals and transmitting the
aggregatesignal to the sink. Since a CH could be located at
any(x,y) point on the terrain with uniform intensity,
theprobability density function of its location is constant
(1/M2). The transmission to the sink may also be multi-hop. We
could estimate the average distance to the sink(dToS) by
integrating the distance function over the areaas follows:
EdToS Zy
Zx
ffiffiffiffiffiffiffiffiffiffiffiffiffiffix2 y2
p 1M2
dxdy
ffiffiffiffiffiffiffiffi
1=6p
M
5
Limits of the definite integral are [M/2, M/2] for both xand y.
If we however assume the sink is located at acorner (say bottom
left origin), range of this integral is
changed to [0,M] giving E[dToS] ffiffiffiffiffiffiffiffi2=3p M.
Accordingly,the average hop to the sink is E[dToS]/r. Now, let C1
rep-resent the energy spent by a CH node during a singleround:
EC1jN n ENvlEelec ENv 1lEDA
ffiffiffiffiffiffiffiffi
1=6p
M
r2lEelec lefsr2 6
We assume lossy data aggregation is performed at the CHwith the
energy for aggregation is EDA.
As for each non-CH node, it only needs to transmit its
data to the CH once during a data interval. Let C2 repre-sent
the energy used by each non-CH node:
EC2jN n lEelec lefs ELvENv 2
7
This allows us to determine the energy spent in a cluster(C3)
during each round as:
EC3jN n EC1jN n EC2jN n ENv 8
Since there are np clusters in the network, we can now de-rive
the total energy usage. Let Crepresent the total energy
spent in the system, then:
ECjN n npEC3jN n nl 21 pEelec EDA
ffiffiffiffiffiffiffiffi
1=6p
Mp
r2Eelec efsr2 efs1 p
4pk
#9
Removing the conditioning on N yields:
EC EECjN n
ENl 21 pEelec EDA ffiffiffiffiffiffiffiffi
1=6p
Mp
r2Eelec efsr2 efs1 p
4pk
" #
kM2l 21 pEelec EDA ffiffiffiffiffiffiffiffi
1=6p
Mp
r2Eelec efsr2 efs1 p
4pk
" #
10E[C] is minimized by a value of p that is a solution of:
efs
4p2k 2Eelec
ffiffiffiffiffiffiffiffi1=6
pM
r2Eelec efsr2
0 11
Eq. (11) has two roots where only one is positive. The sec-ond
derivative of the above equation is also positive forthis root,
hence minimizing the total energy spent. Thisonly positive root of
(11) is given by:
popt 1
2
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiefs
k
ffiffiffiffiffi1=6
pM
r2Eelec efsr2 2Eelec
!vuuut 12
The above expression gives the optimal percentage of
antsrequired to achieve the optimal clustering performance interms
of energy dissipation.
4.3. The clustering algorithm
Any clustering algorithm comprises two components,namely CH
election and cluster formation. Both compo-nents are invoked during
the cluster setup phase ofT-ANT, whereby the phase is activated
through the CS_Timer.When this timer expires, a node checks to see
whether itpossesses an ant. If the node has an ant, it is
guaranteedto become a CH. As there are only a fixed number of
antsin the network, a fixed number of CHs are formed. Sincethere is
no looping statement as a function of the numberof nodes, it is
trivially evident that the election terminates
in constant time. This CH election approach has a verysmall
constant time complexity as opposed to other pro-posals in the
literature.
Observation 1. The CH election process terminates in O(1)time
(c.f. requirement 2).
The cluster formation is triggered by these CHs,whereby they
advertise to the neighbors by broadcastingan advertisement (ADV)
message with their node id. Uponreceiving such message, a regular
node records the CH idand the number of ADV messages received thus
far. At thisstage, the most critical difference between our
biologically-
inspired approach against other typical swarm intelligence
S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801 2791
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
7/16
applications occurs. When regular nodes receive an ADVmessage
from a CH, we allow this message to affect thepheromone level at
these nodes. Here, an ant does not needto be at a node to leave a
pheromone trail, which is con-trary to its typical application. As
such, the influence ofan ant is broader and quicker than their
typical implemen-
tation. This atypical property of our approach has contrib-uted
to a significant reduction in the required number ofants for the
system behavioral convergence, and thus over-comes a common problem
highlighted in many biologi-cally-inspired proposals.
The actual clustering process happens once anothertimer expires.
A node decides to join a cluster when itsJOIN_Timer expires. The
node computes its pheromonelevel based on the number of CHs (nc) in
its neighborhoodand its normalized residual energy. The pheromone
func-tion (pi) is based on the forwarding probability formulaused
in the uniform ant routing algorithm [37], butexpanded as:
pi pi1 Dp
1 Dp 13
where Dp is given by:
Dp k EresiEmax
1n2c
14
Eresi is a nodes residual energy, Emax is the reference max-imum
battery energy and k is the learning rate of the algo-rithm ( =
0.1). This pheromone function is adopted toachieve dual clustering
objectives, namely load balancingas well as energy efficiency. The
effect of quadratic drop
in pheromone with the number of CHs in range not onlypromotes a
good distribution of CHs, but also indirectlyaffects the load
balancing objective. A regular node choosesthe nearest cluster to
join by sending a JOIN message withits id, the selected CH id and
its pheromone level. When aCH receives JOIN messages, it finds the
member with thehighest pheromone level to attract its ant for the
nextround. It is obvious that the amount of state required forthis
clustering is small compared against the stochastic orweight-based
clustering algorithms proposed in theliterature.
Observation 2. T-ANT is completely distributed (c.f.
requirement 1). A node locally decides to become a CH ifan ant
wanders to it or may join a cluster.
Lemma 1. T-ANT has a worst-case processing time com-
plexity of O(n) per node, where n is the number of nodes in
the network (c.f. requirement 3).
Proof. For a homogeneous spatial Poisson process, theprocess
intensity is uniform. Thus, the average nodedegree is pr2n/M2,
where r is the radio range and M isthe side of the square region.
Generally r
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
8/16
If node i is not a CH and this CH k is nearer
Select CH k as the best CH
End
End
/* Only for nodes with ADV */When JOIN_Timer expires at node
i
Compute the pheromone level, pCreate a JOIN message (CH_id,
p)Send JOIN to the selected CH
End
Steady State:When DATA_Timer expires at node i
Capture sensory value, val
If node i is a CH
Wait for data messages from all members
Aggregate data signals
Create a data message (sink_id, val)Send to sink
Else
If node i belongs to a cluster
/* for covered nodes */Create a data message (CH_id, val)Send to
CH
Else
/* for uncovered nodes */Create a data message (sink_id,
val)Forward to sink
End
End
End/* only for CH nodes */When ANT_Timer expires
Pick the best neighbor, j
Send ant to node j
End
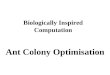
Lemma 3. The probability of two CH nodes in each others
radio range is at least inverse of n, implying the CHs are
mostly well distributed (c.f. requirement 4).
Proof. Without loss of generality, lets assume that thereare two
ants in a network of n nodes. In the worst-case,two CHs may be
formed in almost complete overlappingranges as shown in Fig. 1,
especially during network initial-ization when the ants just follow
a random walk. At thisstage, the normalized residual energy is
fairly uniformacross the network (it does not need to be exactly
same).Thus, the only factor that influences the pheromone levelof
the cluster members is the number of CHs (nc) in range.The nodes in
the shaded area will have a quadratic in nclower pheromone than the
rest. This is due to the quadraticdrop introduced into the
pheromone function [see Eq.
(14)]:
Dp$ 1n2c
pi $ pi11=n2
c11=n2c $ 1n2c
At the next cluster setup phase, the ants would only wanderto
anyof their neighbors outside the shaded area (e.g. ant awanders to
any node in A \ B 0), as their pheromone level ishigher. These ants
would only return to any nodes in theshaded area only when all
other nodes (in the order of n)are visited. This implies that in a
cycle ofn visits, only oncean ant comes in range of another ant
giving a probability1/n. By induction, a network with more ants
will exhibita similar behavior. Moreover, when more than two
antscome into range, the repulsion effect is even greater. Thus,CHs
are mostly well distributed. h
Theorem 1. The T-ANT protocol promotes load balancing.
Proof. In this dynamic protocol, the role of CH is contin-uously
shared among the nodes. With Lemma 3, the electedCHs are mostly
well distributed throughout the networklifetime. As each regular
node chooses to associate to itsnearest CH, this results in similar
cluster sizes as well.Therefore, T-ANT achieves load balancing.
h
It is possible that the wandering ants may die due to
theenvironment uncertainty or any node failure. When thereare
lesser ants than the optimal number, the network oper-ation would
still proceed as before albeit suboptimally.Due to the robustness
of the proposed protocol, theremaining CHs would strive to share
the aggregation task.If there is any uncovered node, it would to
resort to direct(multihop) transmissions towards the sink. The
event ofmost ants dying simultaneously has a probability in
theorder of all nodes dying at about the same time, as the antsare
mostly well distributed. Thus, such an event is onlylikely when the
network is nearing the end of its lifetime.To limit the impact of
isolated node failures, we couldintroduce a timer on the ants. When
this timer expires, cur-
rent ants are flushed out and the sink re-releases the same
abA
B
Fig. 1. An example to illustrate the worst-case scenario of
closelyoverlapping CH nodes. Sets A and B represent nodes in range
of CH aand b, respectively. The shaded area represents nodes with
significantlylower pheromone level than the rest.
S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801 2793
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
9/16
optimal number of ants to restart the above process. Fur-ther
robustness and reliability study on this issue is leftfor future
study.
4.4. The clustering properties
The use of a specific swarm size as derived earlier guar-antees
the network mostly operates with the optimal num-ber of clusters
compared to a stochastic approach that mayhave fewer or more than
the optimal number at any time.The given pheromone expression
guides the evolution ofthe swarm to achieve the separation behavior
among antsin the swarm, which is one the swarm principles
highlightedin Section 3. Separation may not be achieved
immediatelyupon the random release of these ants by the sink.
How-ever, it is found empirically that separation is attainedrather
quickly within a small constant number of rounds.To quantify this
phenomenon, the CH election fitness met-ric is introduced. It is
defined as follows:
S 1nc
Xnci1
ni 15
where nc is the number of CH nodes and ni is the number ofADVs
seen by CHi. By normalizing against numberof CHs, it captures the
average number CHs in the rangeof another. This metric will have a
small value for a net-work with well distributed CHs. For instance,
a value oftwo represents on average two CHs in the range of
anotherCH. Another desirable swarm behavior is alignment. In
ourcontext, the number of members served by a CH is used
torepresent alignment. When the swarm evolves to achieve
separation, alignment is also achieved as a side-benefit.The
clustering fitness metric A is defined to represent align-ment as
follows:
A
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1
nc
Xnci1
mi l2s
16
where mi is the number of members of CH i and l* is theideal
average number of nodes served by a CH in a perfectuniform CH
distribution. l* is computed as n/nc. Thus,this clustering fitness
metric is the standard deviation ofthe clusters membership against
the ideal average. A smal-ler metric value implies that the
membership varianceamong the clusters is small thereby the clusters
are wellbalanced.
5. The simulation framework
We evaluated the performance of the T-ANT clusteringusing a
discrete-event simulator. To enable a comprehen-sive study, the
effects of both routing and MAC protocolsare also integrated. In
the description of the simulator, weassume that each sensor node is
aware of:
1. Its neighbors (even if it changes) due to the occasional
beaconing by the sink and the cluster setup phase; and
2. The network is synchronized by means of any time
syn-chronization protocols [42].
The simulator is developed in C++ and adopts theobject-oriented
approach to allow natural mapping to areal sensor network. The
radio model is currently assumed
to follow an isotropic propagation. As for the MACchoice, we
adopted the CSMA protocol due to its simplic-ity and its promise of
scalability [39,43]. However, astraightforward application of this
protocol in a converge-cast scenario is a recipe for failure. In
the periodic monitor-ing type application, when the sensor
DATA_Timerexpires, all nodes capture their sensory value and
convertto digital via an analog-to-digital converter (ADC) linkedto
the sensing hardware. Assuming a time-synchronizedclustered
network, all nodes simultaneously generate thesensory message for
transmission towards their CHs. Ifno precautions were taken, their
transmissions would inter-fere resulting in many collisions and
retransmissions. This
many-to-one transmission is known as convergecast. Inorder to
reduce collisions, Huang and Zhang [39] proposedthat a node should
delay its transmission relative to its dis-tance to the hop
destination (h) and the node density. Asthere is likely to be many
nodes at each hop, an additionalrandom offset is also included to
further reduce the colli-sion probability. We chose to adopt a
similar temporalcoordination with respect to a nodes CH. However,
itwas modified to be less conservative to reflect the smallerscope
of a cluster rather than an entire network as in[39]. Accordingly,
the random wait time function (T) isgiven as:
Th 1 rand sh 17
where randis a uniformly distributed random number from0 to 1
and s is the average one-hop delay.
At the network layer, we adopted a simple routingmechanism in
Greedy Routing Scheme (GRS) [44] to con-trol the networks
forwarding behavior. The forwardingobjective is to minimize the
number of hops between thesink and the other nodes. To establish
this minimum hoprouting tree, the sink occasionally broadcasts a
beacon mes-sage with a hop count, which is initialized to zero. To
over-come the problem of asymmetrical links that may beprevalent in
WSNs [45], the sink could broadcast at apower level lower than the
maximum level of a regularnode, a move similar to Hes proposal
[46]. This is possiblefor a sensor node with tunable transmit power
as in Mica2motes. Upon receiving the beacon, each node records
thesender id, increments the hop count by one, and thenrebroadcasts
at a power level below its maximum level. Anode only rebroadcasts
if the new hop count is smaller thanits stored value. Since we are
focusing on a stationaryscenario, the sink node only needs to
perform occasionalbeaconing to avoid significant overhead. This
forwardingrule establishes a minimum hop tree rooted at the
sink.
Finally, the T-ANT protocol is implemented between the
2794 S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
10/16
application and the network layer, and thus, the overallsystem
framework is as shown in Fig. 2.
Based on the given simulation framework, we investi-gate T-ANTs
performance against LEACH, HEED anda flat strategy (i.e. the
application sits directly on GRS).Since LEACH cannot be applied
directly to a multihopnetwork, we modified this algorithm to use
the GRS rout-ing protocol to forward messages whenever the
destinationis not within the radio range. As for HEED, even
thoughthis algorithm is able to achieve a good CH distributionin
general compared to others in the literature, the use oftentative
CHs that do not finally become CHs leaves someregular nodes
uncovered (i.e. no CH in range to join).According to the proposed
HEED implementation [3],such uncovered nodes are forced to become
CHs. In our
view, this move goes against its main design goal of achiev-ing
a good CH distribution. Such forced CHs may be inrange of other
CHs, and they are mostly single-node clus-ters. The issue of having
many single-node clusters wasaddressed by increasing the radio
range of the nodes in[3]. We, however, feel that instead of forcing
these nodesto become CHs, they should just be left uncovered.
Onlythe nodes that did not receive any messages at all shouldbe
made CHs. Such a move has a notional structurechange, but it is
operationally the same. Thus, for ourcomparative study here, we
adopt this suggestedimplementation.
The results from the comparison and other evaluationsare
presented further.
6. Results and discussions
For these simulation experiments, we assumed that thereare 100
sensor nodes distributed randomly in a squareM M region with M= 100
m. The transceiver energyparameters are set as: Eelec = 50 nJ/bit
and efs = 10 pJ/bit/m2. The energy for data aggregation is set
toEDA = 5 nJ/bit per signal [13]. The control and data mes-sage
sizes are fixed at 30 bytes, and sensory data is gener-
ated at 2-s interval. Each CH node retains its CH status
for 20 s. The anti-pheromone rate is fixed at 0.1.
Unlessotherwise stated, all the following investigations adoptthese
values as their system parameters as summarized inTable 2. For all
simulation results in this paper, each exper-iment is repeated 10
times and a 95% confidence interval isobtained.
For the purpose of benchmarking our protocol againstothers in
the literature, we chose to compare against twowell-known
proposals, LEACH and a more recent one,HEED, as indicated in the
previous section. These twoprotocols belong to two different
approaches of cluster-ing; the former is a stochastic clustering
scheme andmakes a clever use of dynamic thresholding, whereasthe
latter adopts a widely used approach in the MANETenvironment,
namely weight-based clustering for ensuringgood CH distribution.
The key design goals of these pro-tocols are the same as our
proposal. Both protocols aregood baseline for comparison due to the
following
features:
Clustering is distributed and entirely based on
localinformation.
Clusters are disjoint. They are designed to achieve energy
efficiency through
load balancing. Each employs a different mode of CH
election.
For the HEED protocol implementation, we used thevalues
suggested in [3] for its parameters, and chose touse node degree as
the secondary parameter for clustering,as it results in the best
load-balanced performance. In thissection, a comprehensive
evaluation of T-ANT is provided.The followings are the different
aspects of study performed:
The number of clusters required for optimal
T-ANTperformance.
The clustering properties of the clustered formations. The
distribution of residual energy of nodes. Topology formation as the
system evolves towards
convergence. Network lifetime.
These are the performance metrics utilized in our
investigations:
Application
T-ANT
GRS
CSMA
Radio
ADC
Sensor
Fig. 2. Simulation framework involving the core components of
acommunication stack.
Table 2The system parameters
Parameter Value
Field dimension, M 100 mMessage size 30 bytesSensor DATA_Timer 2
sCS_Timer 20 s
Anti-pheromone rate, b 0.1Electronics energy, Eelec 50
nJ/bitAmplifier energy, efs 10 pJ/bit/m
2
Data aggregation energy, EDA 5 nJ/bit/signalNode radio range 30
m
S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801 2795
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
11/16
Clustering fitness: This is based on the fitness metricgiven as
Eq. (16). It represents the fitness of the clusterformation in
terms of membership.
CH election fitness: This is based on the fitness metricgiven in
Eq. (15). It represents the fitness of all theelected CH nodes in
terms of their distribution.
Energy per round: This metric represents the energy dis-sipated
by all nodes in a round of data collection. Network lifetime: This
metric represents the time period
from the instant the network is deployed to the momentwhen the
first node runs out of energy.
6.1. T-ANT characteristics
Since T-ANTs performance depends on the number ofants used to
form the clusters, the analysis results are usedto determine this
optimal number. These results are verifiedusing simulation. Fig. 3
depicts the comparison betweenthose results. Even though the
absolute energy values aredifferent, it is obvious that both curves
suggest a very sim-ilar pattern. The discrepancy is mainly due to
the analysisconsidering the energy usage of T-ANT alone, whereasthe
simulator considers the overhead of the entire stack.Both results
concur that the optimal number of ants forthis scenario is nine.
This optimal number of ants, whichdetermines the number of
clusters, is attainable using Eq.(12). When there are fewer or more
clusters in the network,the energy dissipation worsens. When there
are fewer clus-ters, there will be many cases of uncovered nodes.
Thesenodes will resort to sending their messages, possibly
multi-
hop, to the sink. However, when there is more than theoptimal
number, the overhead of managing these clusterswill outweighs their
benefit. Thus, it is necessary to identifythe optimal number of
ants to achieve T-ANTs best per-formance based on the deployment
parameters.
In order to observe the generality of the above finding,we used
Eq. (12) to determine the optimal number of clus-ters for different
terrain areas as well as number of nodes.In Fig. 4, a wireframe 3D
plot is given to depict how theoptimal number varies with the two
factors. For a fixed
area, the optimal number of clusters varies in O ffiffiffinp
,
where n is the number of nodes. As for a fixed number ofnodes,
the optimal number of clusters is linear of terrainarea.
6.2. Clustering properties
In this study, we characterize the clustering properties ofT-ANT
against LEACH and HEED in terms of clusteringand CH election
fitness. Fig. 5 depicts clustering fitness ofthese protocols at
different simulation time. This fitnessmetric represents the
alignment property, which indicateshow well aligned the cluster
sizes are. Both T-ANT and
HEED mostly exhibit small standard deviation values.This implies
each cluster has similar number of members.This behavior is only
achievable if the CHs are always welldistributed. As claimed in
[3], we verified that HEED isable to achieve this property with our
proposed modifica-tion. As for LEACH, the fitness value varies
quite unpre-dictably. This is mainly due to its stochastic
electionnature, where the number of clusters formed at each
roundchanges quite significantly. Moreover, it is also possiblethat
the elected CHs may even be clumped. When the
36
36.5
37
37.5
38
38.5
39
39.5
40
4 8 10 12 14 16 18 20
Number of ants
EnergyperRound(mJ)
2.66
2.67
2.68
2.69
2.7
2.71
2.72
2.73
EnergyperRound(mJ)
Sim
Math
6
Fig. 3. Average energy dissipated against the number of ants for
T-ANT.The simulation results (i.e. dots) are plotted against the
left y-axis, and the
analysis results (i.e. line) are against right y-axis.
50
150
250
350
450
550
650
750
850
950
2500
10000
22500
40000
0
10
20
30
40
50
60
OptimalNumberofClusters
Number of nodes Terrain
Area(m2)
Fig. 4. The optimal number of clusters [using Eq. (12)] against
the numberof nodes and the terrain area. The number of nodes is in
range [50,1000],whereas area size is in [2500,40,000].
0
5
10
15
20
25
30
35
40
45
50
0 200 400 600 800 1000
Time (s)
ClusteringFitness
T-ANT
HEED
LEACH
Fig. 5. The clustering fitness at different simulation time for
T-ANT,
LEACH and HEED.
2796 S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
12/16
CHs are clumped, the disparity among clusters is large interms
of their membership. At other times, the number ofclusters may be
substantially lesser than necessary toachieve complete network
coverage. Many nodes will not
be covered and the few clusters may have too many mem-bers far
from the ideal mean. The two outlying LEACHpoints on Fig. 5
represent such a scenario.
In Fig. 6, the CH election fitness is depicted for
theseprotocols. This fitness metric captures how well the
electedCHs are distributed. It represents the average number ofCHs
in the range of another. A rather consistent behavioras above is
obtained. Both T-ANT and HEED have smallervalues with HEED showing
the least CH overlaps with theproposed modification. Due to its
biological inspiration,T-ANT has a higher value initially before
the systemachieves convergence. As the swarm evolves, the ants
areable to move to better locations, and within five rounds,the
swarm is able to achieve separation. Even after a goodCH
distribution is achieved, the fitness value keepschanging as the
ants are forced to wander to achieve loadbalancing. It is also
found that HEED mostly forms lessernumber of CHs than T-ANT. The
number of clustersformed using T-ANT always follows the suggested
optimalnumber as per our analysis. Thus, in terms of
energyefficiency, HEED will not be able to perform as well asT-ANT
due to its clustering process. As for LEACH, itsprobabilistic CH
election forces the value to vary signifi-cantly.At some rounds,
there are no CHsin range of anotherbut at other rounds, there are
more than a few CHs in range.
6.3. Load distribution
In order to observe how well T-ANT promotes load bal-ancing
among the nodes, we ran a simulation on periodicdata collection at
2-s interval for 2000 s. At the outset, eachnode had 2-J battery
energy. Figs. 7(a) and (b) shows resid-ual energy across the nodes
at the end of simulation com-paring three protocols. The plots are
separated to avoidclutter. It is obvious that T-ANT achieved the
best perfor-mance by maintaining a near uniform battery
dischargeamong the nodes. HEED did not perform as well mainly
due to its use of tentative CHs that do not ultimately
become CHs. This causes the affected nodes to become
uncovered, which in turn forces them to send their mes-sages
directly, possibly multihop, to the sink. As expected,LEACH also
did not perform as well. Since LEACH doesnot guarantee an optimal
clustering throughout its opera-tion, the number of clusters formed
and their sizes varygreatly. When a suboptimal clustered topology
is formedand operated for certain interval, this causes some
nodesto become more energy drained than the others.
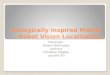
6.4. Dynamics of clustered topology
The following figures visually demonstrate how T-ANTpromotes
good distribution of CHs in thenetwork comparedto HEED and LEACH.
Figs. 8 and 9 depict the clusteredtopology formation at different
rounds. For T-ANT, wechose to use the optimal number of ants based
on the analy-sis. In the following figures, a ring represents a CH,
a filledcircle represents a regular node, and a line segment links
amember to its CH. Any unlinked regular nodes are uncov-ered. For
T-ANT, it is visually evident that when the sinkrandomly releases
the ants, they could still be forced toneighboring nodes, which
results in some regular nodes leftuncovered as shown in Fig. 8(a).
However, as the swarmevolves, the ants are able to achieve some
separation byround three [Fig. 8(b)]. When the system converges by
round
five, the network achieves good CH distribution.
0
1
2
3
4
5
6
7
8
9
10
0 200 400 600 800 1000
Time (s)
CHFitness
T-ANT
HEED
LEACH
Fig. 6. The CH election fitness at different simulation time for
T-ANT,LEACH and HEED.
1.65
1.7
1.75
1.8
1.85
1.9
1.95
2
0 20 40 60 80 100
Node ID
Resid
ualEnergy(J)
T-ANT
HEED
1.65
1.7
1.75
1.8
1.85
1.9
1.95
2
0 20 40 60 80 100
Node ID
ResidualEnergy(J)
T-ANT
LEACH
Fig. 7. Residual energy distribution of nodes after 2000-s
simulation ofT-ANT, HEED and LEACH. The nodes are initially
equipped with 2-Jbattery energy. (a) T-ANT vs. HEED; (b) T-ANT vs.
LEACH.
S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801 2797
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
13/16
HEED is also able to achieve a fair CH distribution. How-ever,
it is not able to achieve complete network coverageresulting in
many regular nodes left un-clustered. There aretwo issues that
might have contributed to this shortcoming.Firstly, the issue of
tentative CHs that do not finally becomeCHs, as highlighted
earlier. The other issue is with the proto-cols Finalize phase, its
last phase of cluster setup. Duringthis phase, any node that did
not receive a CH message isforced to become a CH. This causes some
neighboring nodesto become CHs, as depicted in Fig. 9(b). LEACH
exhibitssignificant variations to its clustered topology, as
expected.For certain rounds, there are very few clusters formed
withmany nodes left uncovered, as shown in Fig. 9(c). At
otherrounds, there are many more clusters than necessary,
whichforce many of them to be in range of quite a few CHs[Fig.
9(d)]. Such a formation results in significant disparityin their
cluster membership, leading to imbalance in energydissipation when
the network has to operate under this sub-optimal structure for a
certain interval.
6.5. Network lifetime
In Fig. 10, the improvement gained through T-ANT isfurther
exemplified by the network lifetime graph. For this
investigation, we set initial battery energy at only 0.1 J
to
let the nodes to die sooner. This however does not changethe
pattern of behavior of these protocols. It is evident thatT-ANT
exhibits the longest lifetime with all nodes remainingfully
functional. It is found that T-ANT achieves more thantwice the
lifetime of HEED and LEACH. It also achieves asmuch as five times
the lifetime of the flat routing approach.There is a distinctive
stair-case effect across all the curves.This is caused by the
chosen routing protocol. Whenever cer-tain critical nodes on the
routing tree die, a part of the net-work is partitioned resulting
in a number of nodessimultaneously losing connectivity to the sink.
Thus, thereare sudden plunges in the numberof active nodes
throughoutthe curves. T-ANT avoids the use of such critical nodes
aslong as possible with its ants. This obviously indicates
thatT-ANT promotes good load balancing across the entire net-work
to sustain the network for its longest possible use.Fig. 10 also
indicates the utility of a clustering algorithmagainst a flat
routing approach. All the clustering protocolswith data aggregation
are able to sustain network lifetime atleast twice the lifetime of
the minimum hoprouting protocol.
7. Conclusions
In this work, we proposed the first novel application of
the swarm intelligence technique to the resource-starved
Fig. 8. The dynamics of T-ANT clustered topology at different
rounds as the swarm evolves. During earlier rounds, quite a few
nodes are uncovered as theswarm behavior hasnot converged. However,
thecoverageis almosttotalwhenconvergence is achieved.Topologyformed
at round:(a) 1 (b)3 (c)10 and(d) 20.
2798 S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
14/16
wireless sensor nodes domain. Due to the unique challengesof
this domain, we devised an approach that allows thealgorithm to
converge very quickly with only limitedoverhead. Unlike the
traditional applications of suchbiologically-inspired technique, we
allow an agent to influ-ence all nodes within the radio range of
the host node, andnot just this node alone.
The T-ANT clustering protocol utilizes these social
agents to guide the election of clusterheads in a totally
distributed manner. An analysis was performed to deter-mine the
number of clusterheads necessary to achieve theoptimal performance
in terms of energy dissipation.Accordingly, we employed this fixed
number of agents toelect clusterheads. This unique approach allowed
T-ANTto form and maintain the optimal number of clustersthroughout
the network operation. Due to the robustnessof any
biologically-inspired algorithm, this protocol couldhandle
unforeseen circumstances in the environment andnode failures. We
have also introduced two fitness metricsthat are useful for
comparison of clustering propertiesbetween algorithms. It is
demonstrated here that T-ANTis able to achieve two desirables swarm
behaviors, namelyseparation and alignment, in a fully distributed
way. Dueto the separation behavior, the elected clusterheads
aremostly well distributed across the network. Moreover, asa
side-benefit of this behavior and the alignment behavior,T-ANT also
achieved an even distribution of membersamong the clusters. It is
also found that T-ANT maintainsubstantially lesser state overhead
in memory comparedto LEACH or HEED.
Such a biologically-inspired approach may also be use-ful in
applications that require an in-network actuation,to assist in the
sensoractuator coordination. The feasibil-
ity of this use is left for our future work.
Fig. 9. The dynamics of HEED and LEACH clustered topologies at
different rounds. The coverage of both protocols is not total. HEED
at round (a) 10(b) 20; LEACH at round (c) 10 and (d) 20.
0
20
40
60
80
100
0 1000 2000 3000 4000 5000
Time (s)
Numberofalivenodes
T-ANT
HEED
LEACH
Flat
Fig. 10. Network lifetime against simulation time of T-ANT, HEED
andLEACH.
S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801 2799
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
15/16
Acknowledgements
The authors thank the anonymous reviewers for theirvaluable
comments and suggestions. This work wassupported in part by grants
from ARC Discovery ProjectDP0664782 and USyd R&D L2844
U3230.
References
[1] J. Hill, M. Horton, R. Kling, L. Krishnamurthy, The
platformsenabling wireless sensor networks, Communications of the
ACM 47(6) (2004) 4146.
[2] K. Akkaya, M. Younis, A survey on routing protocols for
wirelesssensor networks, Elsevier Ad Hoc Networks 3 (3) (2005)
325349.
[3] O. Younis, S. Fahmy, Heed: a hybrid, energy-efficient,
distributedclustering approach for ad hoc sensor networks, IEEE
Transactionson Mobile Computing 3 (4) (2004) 366379.
[4] Y. Ohtaki, N. Wakamiya, M. Murata, M. Imase, Scalable
ant-basedrouting algorithm for ad-hoc networks, in: 3rd IASTED
InternationalConference on Communications, Internet, and
Information Techno-logy, 2004, pp. 5055.
[5] S. Selvakennedy, S. Sinnappan, Y. Shang, Data dissemination
basedon ant swarms for wireless sensor networks, in: IEEE
ConsumerCommunications and Networking Conference, 2006, pp.
132136.
[6] M. Gerla, J.T.-C. Tsai, Multicluster, mobile, multimedia
radionetwork, Wireless Networks 1 (3) (1995) 255265.
[7] F. Kuhn, T. Moscibroda, R. Wattenhofer, Initializing newly
deployedad hoc and sensor networks, in: 10th Annual International
Confer-ence on Mobile Computing and Networking, 2004, pp.
260274.
[8] D. Baker, A. Ephremides, The architectural organization of a
mobileradio network via a distributed algorithm, IEEE Transactions
onCommunications 29 (11) (1981) 16941701.
[9] G. Gupta, M. Younis, Load-balanced clustering of wireless
sensornetworks, in: IEEE International Conference on
Communications,May 2003, pp. 18481852.
[10] A.D. Amis, R. Prakash, Load-balancing clusters in wireless
ad hocnetworks, in: 3rd IEEE Symposium on Application-Specific
Systemsand Software Engineering Technology, March 2000, pp.
2532.
[11] A.D. Amis, R. Prakash, T.H.P. Vuong, D.T. Huynh,
Max-mind-cluster formation in wireless ad hoc networks, in: 19th
JointConference of the IEEE Computer and Communications, March2000,
pp. 3241.
[12] C.-F. Chiasserini, I. Chlamtac, P. Monti, A. Nucci, An
energy-efficient method for nodes assignment in cluster-based ad
hocnetworks, Wireless Networks 10 (3) (2004) 223231.
[13] W.B. Heinzelman, A.P. Chandrakasan, H. Balakrishnan, An
appli-cation-specific protocol architecture for wireless
microsensor net-works, IEEE Transactions on Wireless Communications
1 (4) (2002)660670.
[14] S. Selvakennedy, S. Sinnappan, A configurable
time-controlled
clustering algorithm for wireless sensor networks, in: 1st
InternationalWorkshop on Heterogenous Wireles Sensor Networks, IEEE
Com-puter Society, 2005, pp. 368372.
[15] S. Bandyopadhyay, E.J. Coyle, An energy efficient
hierarchicalclustering algorithm for wireless sensor networks, in:
22nd IEEEJoint Conference of the IEEE Computer and
CommunicationsSocieties (INFOCOM), 2003, pp. 1713 1723.
[16] A. Ephremides, J. Wieselthier, D. Baker, A design concept
for reliablemobile radio networks with frequency hopping signaling,
Proceedingsof the IEEE 75 (1) (1987) 5673.
[17] C.R. Lin, M. Gerla, Adaptive clustering for mobile wireless
networks,IEEE Journal on Selected Areas in Communications 15 (7)
(1997)12651275.
[18] S. Basagni, Distributed clustering for ad hoc networks, in:
4thInternational Symposium on Parallel Architectures, Algorithms,
and
Networks, June 1999, pp. 310315.
[19] M. Chatterjee, S.K. Sas, D. Turgut, An on-demand
weightedclustering algorithm (wca) for ad hoc networks, in: IEEE
GlobalTelecommunications Conference, December 2000, pp.
16971701.
[20] S. Ghiasi, A. Srivastava, X. Yang, M. Sarrafzadeh,
Optimalenergy aware clustering in sensor networks, Sensors 2 (2002)
258269.
[21] J. Pan, Y.T. Hou, L. Cai et al., Topology control for
wireless sensornetworks, in: 9th International Conference on Mobile
Computing andNetworking, September 2003, pp. 286299.
[22] T. Shu, M. Krunz, S. Vrudhula, Power balanced
coverage-timeoptimization for clustered wireless sensor networks,
in: 6th ACMInternational Symposium on Mobile Ad Hoc Networking
andComputing, May 2005, pp. 111120.
[23] M.J. Handy, M. Haase, D. Timmermann, Low energy
adaptiveclustering hierarchy with deterministic cluster-head
selection, in: 4thInternational Workshop on Mobile and Wireless
CommunicationsNetwork, 2002, pp. 368372.
[24] M. Genes, U. Sorges, I. Bouazizi, Ara the ant-colony based
routingalgorithm for manets, in: ICPP Workshop on Ad Hoc
Networks,August 2002, pp. 7985.
[25] G.D. Caro, M. Dorigo, Antnet: distributed stigmergetic
control forcommunication networks, Journal of Artificial
Intelligence 9 (1998)317365.
[26] M. Roth, S. Wicker, Termite: Emergent ad-hoc networking,
in:Second Mediterranean Workshop on Ad-Hoc Networks, 2003.
[27] H.F. Wedde, M. Farooq, T. Pannenbaecker et al., Beeadhoc:
anenergy efficient routing algorithm for mobile ad hoc networks
inspiredby bee behavior, in: Conference on Genetic and
EvolutionaryComputation, June 2005, pp. 153160.
[28] I. Kassabalidis, M.A. El-Sharkawi, R.J. Marks et al.,
Adaptive-sdr:adaptive swarm-based distributed routing, in:
International JointConference on Neural Networks, May 2002, pp.
351354.
[29] M. Heissenbuttel, T. Braun, Ants-based routing in large
scale mobilead-hoc networks, in: Kommunikation in Verteilten
Systemen, Feb-ruary 2003, pp. 9199.
[30] B.A. Kadrovach, G.B. Lamont, A particle swarm model for
swarm-based networked sensor systems, in: ACM Symposium on
AppliedComputing, March 2002, pp. 918924.
[31] M.J. Mataric, Issues and approaches in the design of
collective autono-mousagents, Robotics and AutonomousSystems 16
(24)(1995) 321331.
[32] M. Dorigo, G.D. Caro, L.M. Gambardella, Ant algorithms
fordiscrete optimization, Artificial Life 5 (2) (1999) 137172.
[33] C.W. Reynolds, Flocks, herds and schools: a distributed
behavioralmodel, ACM SIGGRAPH Computer Graphics 21 (4) (1987)
2534.
[34] V. Hartmann, Evolving agent swarms for clustering and
sorting, in:Conference on Genetic and Evolutionary Computation,
June 2005,pp. 217224.
[35] R. Schoonderwoerd, O.E. Holland, J.L. Bruten, L.J.M.
Rothkrantz,Ant-based load balancing in telecommunications networks,
AdaptiveBehavior 2 (1996) 169207.
[36] S.G. Foss, S.A. Zuyez, On a voronoi aggregative process
related to abivariate poisson process, Advances in Applied
Probability 28 (4)(1996) 965981.
[37] D. Subramanian, P. Druschel, J. Chen, Ants and
reinforcementlearning: a case study in routing in dynamic networks,
in: Interna-tional Joint Conference on Artificial Intelligence,
Morgan Kaufman,1997, pp. 832838.
[38] J. Montgomery, M. Randall, Anti-pheromone as a tool for
betterexploration of search space, in: Third International Workshop
on AntAlgorithms, Springer-Verlag, 2002, pp. 100110.
[39] Q. Huang, Y. Zhang, Radial coordination for convergecast in
wirelesssensor networks, in: 29th IEEE International Conference on
LocalComputer Networks, November 2004, pp. 542549.
[40] H. Gupta, V. Navda, S.R. Das, V. Chowdhary, Efficient
gathering ofcorrelated data in sensor networks,in: MobiHoc05, ACM
Press, 2005,pp. 402413.
[41] J. Chou, D. Petrovic, K. Ramachandran, A distributed and
adaptivesignal processing approach to reducing energy consumption
in sensor
networks, INFOCOM (2003) 10541062.
2800 S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801
-
8/6/2019 A Biologically-Inspired Clustering Protocol for
Wireless Sensor Networks
16/16
[42] B. Sundararaman, U. Buy, A.D. Kshemkalyani, Clock
synchroniza-tion for wireless sensor networks: a survey, Elsevier
Ad HocNetworks 3 (3) (2005) 281323.
[43] A. Woo, D. Culler, A transmission control scheme for media
access insensor networks, in: 7th Annual International Conference
on MobileComputing and Networking, July 2001, pp. 221235.
[44] G. Finn, Routing and addressing problems in large
metropolitan-scale internetworks, ISI, March 1987.
[45] D. Ganesan, B. Krishnamachari, A. Woo et al., Complex
behavior atscale: an experimental study of low-power wireless
sensor networks,UCLA, LA, 2002, pp. 111.
[46] T. He, S. Krishnamurthy, J.A. Stankovic et al., Wide-area
monitoringof mobile objects: energy-efficient surveillance system
using wirelesssensor networks, in: 2nd ACM International Conference
on MobileSystems, Applications, and Services, ACM, 2004, pp.
270283.
S. Selvakennedy obtained his Ph.D. in computercommunications in
1999 from the University ofPutra, Malaysia. He is currently serving
as aSenior Lecturer at the University of Sydney,Australia. His
current research interests lies indeveloping algorithms for media
access, routing,localization and topology control issues in
wire-less sensor networks, wireless ad hoc networksand wireless
mesh networks. Dr. Selvakennedy isa member of ACM and IEEE.
Sukunesan Sinnappan received his Ph.D. inInformation Science
from University of New-castle, Australia in 2004. He has been
working asa Lecturer in the Department of InformationSystems,
University of Wollongong, Australiasince 2004. He is a member of
IEEE (Society onSocial Implications of Technology), Associationof
Information Systems (SIG E-Business), andInternational Association
for Development ofInformation Society (IADIS). His
researchinterests include online profiling, location-basedservices
and wireless sensor networks.
Yi Shang is an Associate Professor in theDepartment of Computer
Science at the Univer-sity of Missouri at Columbia. He received
Ph.D.degree from University of Illinois at Urbana-Champaign in
1997. His research interests includewireless sensor networks,
bioinformatics, intelli-gent distributed systems and non-linear
optimi-zation. His research has been supported by NSF,
NIH, DARPA, Microsoft, and Raytheon. He is amember of the IEEE
and ACM.
S. Selvakennedy et al. / Computer Communications 30 (2007)
27862801 2801